JP5282590B2 - Vehicle driving support device and vehicle driving support method - Google Patents
Vehicle driving support device and vehicle driving support method Download PDFInfo
- Publication number
- JP5282590B2 JP5282590B2 JP2009019259A JP2009019259A JP5282590B2 JP 5282590 B2 JP5282590 B2 JP 5282590B2 JP 2009019259 A JP2009019259 A JP 2009019259A JP 2009019259 A JP2009019259 A JP 2009019259A JP 5282590 B2 JP5282590 B2 JP 5282590B2
- Authority
- JP
- Japan
- Prior art keywords
- obstacle
- vehicle
- avoidance
- host vehicle
- probability distribution
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

































Landscapes
- Steering Control In Accordance With Driving Conditions (AREA)
- Traffic Control Systems (AREA)
Abstract
Description
本発明は、運転者による障害物回避操作を支援する車両用運転支援装置および車両用運転支援方法に関する。 The present invention relates to a vehicle driving support device and a vehicle driving support method that support an obstacle avoidance operation by a driver.
従来、この種の技術としては、例えば、特許文献1に記載の技術がある。
この特許文献1に記載の技術では、まず、自車両の運動状態および他車両の運動状態を検出する。次に、それら自車両の運動状態および他車両の運動状態に基づいて、設定時間後における自車両の予測到達位置と他車両の予測到達位置とを算出する。次に、地図上に、自車両の到達予測位置に自車両の車両サイズに応じた四角形を配置する。同様に、他車両の到達予測位置に他車両の車両サイズに応じた四角形を配置する。そして、各四角形が重複する面積の大きさに応じて、運転者に警報等の情報を提供する。
Conventionally, as this type of technology, for example, there is a technology described in
In the technique described in
ところで、特許文献1に記載の技術では、他車両の走行状態の検出誤差に応じて、地図上に配置した、他車両の車両サイズに応じた四角形を拡大するようになっている。
そのため、例えば、他車両の走行状態の検出誤差が大きい場合には、他車両の車両サイズに応じた四角形が大きくなる。それゆえ、各四角形が重複し易くなり、警報の発生タイミングが早くなる。その結果、運転者に違和感を与える可能性があった。
したがって、運転者による障害物回避操作を適切に支援することが困難であった。
本発明は、上記のような点に着目し、運転者による障害物回避操作をより適切に支援可能とすることを課題としている。
By the way, in the technique described in
Therefore, for example, when the detection error of the running state of the other vehicle is large, the quadrangle corresponding to the vehicle size of the other vehicle becomes large. Therefore, each quadrangle is likely to overlap, and the alarm generation timing is accelerated. As a result, the driver may feel uncomfortable.
Therefore, it has been difficult to appropriately support the obstacle avoidance operation by the driver.
This invention pays attention to the above points, and makes it a subject to enable it to support obstacle avoidance operation by a driver more appropriately.
上記課題を解決するため、本発明は、自車両の周囲の障害物の位置を検出し、検出した位置および障害物検出手段の特性により当該位置に含まれる検出誤差の性質に基づいて、前記障害物の存在確率分布を推定する。そして、推定した存在確率分布に基づいて、運転者による障害物回避操作を支援する。 In order to solve the above-mentioned problem, the present invention detects the position of an obstacle around the host vehicle, and based on the detected position and the characteristics of the obstacle detection means, based on the nature of the detection error included in the position, the obstacle Estimate the existence probability distribution of an object. Based on the estimated existence probability distribution, the driver assists the obstacle avoidance operation.
本発明によれば、例えば、障害物検出手段の検出結果に含まれる検出誤差、つまり、障害物の位置の検出誤差が大きい場合に、障害物の存在確率を低減することができる。それゆえ、障害物回避操作の支援量を低減できる。その結果、運転者による障害物回避操作に当該回避操作の支援が干渉することを抑制できる。
したがって、運転者による障害物回避操作をより適切に支援できるようになる。
According to the present invention, for example, when the detection error included in the detection result of the obstacle detection unit, that is, the detection error of the position of the obstacle is large, the probability of existence of the obstacle can be reduced. Therefore, the support amount for the obstacle avoidance operation can be reduced. As a result, it is possible to suppress the assistance of the avoidance operation from interfering with the obstacle avoidance operation by the driver.
Therefore, the driver can more appropriately support the obstacle avoidance operation.
次に、本発明に係る実施形態について図面を参照して説明する。
(第1実施形態)
図1は、本実施形態の車両用運転支援装置を装備した自車両SWの装置構成の概念図である。
(構成)
図1に示すように、自車両SWは、前輪操舵で且つ前輪駆動の車両である。
自車両SWは、次のような種々のセンサ類を装備する。そのセンサ類は、複数台のカメラ1、車速センサ2、および操舵角センサ3である。これらセンサ類は、検出信号を回避支援コントローラ4に出力する。
Next, an embodiment according to the present invention will be described with reference to the drawings.
(First embodiment)
FIG. 1 is a conceptual diagram of a device configuration of a host vehicle SW equipped with the vehicle driving support device of the present embodiment.
(Constitution)
As shown in FIG. 1, the host vehicle SW is a front-wheel steering and front-wheel drive vehicle.
The own vehicle SW is equipped with various sensors as follows. The sensors are a plurality of
カメラ1は、自車両SWの前方の情報を検出する。例えば、車室内前方に取り付けたCCDカメラ等を利用可能である。そして、自車両SWの前方の道路状況を撮影することで、障害物SMの有無および当該障害物SMの位置を検出する。障害物SMとは、自車両SWの走行の障害となる物体である。例えば、歩行者、車両等が挙げられる。また、カメラ1を2台で構成してステレオ形式とすることで、障害物SMとの間の距離も検出する。
The
車速センサ2は、車輪の回転数を検出する。例えば、後輪5RL、5RRに取り付けたロータリエンコーダ等が利用可能である。そして、後輪5RL、5RRの回転に比例して発生するパルス信号を検出することで、後輪5RL、5RRの回転数を検出する。
操舵角センサ3は、運転者による操舵の回転角度を検出する。例えば、ラック&ピニオン方式で構成した前輪操舵機構における、ピニオンに取り付けたロータリエンコーダ等が利用可能である。そして、ピニオンの回転に比例して発生するパルス信号を検出することで、ステアリングホイール6の回転角度を検出する。
The
The
また、自車両SWは、ステアリングアクチュエータ7を備える。ステアリングアクチュエータ7は、回避支援コントローラ4からの信号に応じて、運転者による障害物回避操作を支援する操舵支援トルクをステアリングコラム8に付与する。例えば、油圧パワーステアリングまたは電動パワーステアリングを利用可能である。
回避支援コントローラ4は、マイクロプロセッサからなる。マイクロプロセッサは、A/D変換回避、D/A変換回避、中央演算処理装置およびメモリ等から構成した集積回避を備える。そして、メモリに格納したプログラムに従って、各種センサで検出した信号の処理を行い、その処理結果を、ステアリングアクチュエータ7に出力する。
The host vehicle SW includes a
The
図2に、以上の装置構成を機能別にまとめたブロック図を示す。
自車両状態検出手段は、車速センサ2によって構成する。そして、車速センサ2で検出した信号を統合的に処理して自車両SWの運動状態に関する情報を得る機能を実現する。
操作状態検出手段は、操舵角センサ3によって構成する。そして、操舵角センサ3で検出した信号を処理して運転者の操作状態に関する情報を得る機能を実現する。
FIG. 2 is a block diagram summarizing the above-described device configuration by function.
The own vehicle state detection means is constituted by the
The operation state detection means is constituted by the
障害物検出手段は、カメラ1によって構成する。そして、カメラ1で撮像したイメージを画像処理して障害物SMの位置に関する情報を抽出する機能を実現する。
存在確率分布推定手段は、回避支援コントローラ4によって構成する。そして、障害物検出手段で得た情報を処理して障害物SMの存在確率を推定する機能を実現する。
回避支援手段は、ステアリングアクチュエータ7によって構成する。そして、自車両状態検出手段、操作状態検出手段、および存在確率分布検出手段で得た情報に基づき、運転者による障害物回避操作を支援する機能をステアリングアクチュエータ7で実現する。
The obstacle detection means is configured by the
The existence probability distribution estimation means is configured by the
The avoidance support means is constituted by the
次に、回避支援コントローラ4の処理について図面を参照して説明する。
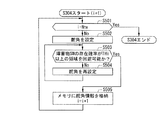
図3は、回避支援コントローラ4の処理を示すフローチャートである。
図4は、想定する場面の一例を示す平面図である。
ここでは、具体性を持たせて処理を分かりやすくするために、図4に示す場面を想定して説明する。図4に示す場面では、自車両SWが直線道路上を走行しているときに、自車両SWの前方に静止した障害物SMを検出した場面を想定している。なお、障害物SMの左右のいずれにも自車両SWが通り抜け可能なスペースがあるものとする。
Next, processing of the
FIG. 3 is a flowchart showing processing of the
FIG. 4 is a plan view showing an example of an assumed scene.
Here, in order to make the processing easy to understand by giving concreteness, description will be made assuming the scene shown in FIG. In the scene shown in FIG. 4, it is assumed that an obstacle SM stationary in front of the host vehicle SW is detected while the host vehicle SW is traveling on a straight road. It is assumed that there is a space where the host vehicle SW can pass through on either side of the obstacle SM.
なお、図3の処理は、設定したサンプリング周期で繰り返し実行する。
図3に示すように、まず、そのステップS101では、各種センサが検出した信号をメモリ上に読み込む。そして、自車両SWの運動状態、自車両SWの操作状態、障害物SMの位置、および障害物SMとの間の距離を、統一した座標系上の値として算出する。上記座標系は、適当に設定することが可能である。本実施形態では、図4に示すように、自車両SWの車体の前後方向にX軸を、そのX軸と垂直である車幅方向にY軸を設定する。また、本実施形態の説明では、上記座標系は、X座標系の原点をカメラ1の取り付け位置に設定し、且つ、Y座標の原点を道路の中心線付近に設定する。
Note that the processing of FIG. 3 is repeatedly executed at a set sampling cycle.
As shown in FIG. 3, first, in step S101, signals detected by various sensors are read into the memory. Then, the movement state of the host vehicle SW, the operation state of the host vehicle SW, the position of the obstacle SM, and the distance between the obstacle SM are calculated as values on a unified coordinate system. The coordinate system can be set appropriately. In this embodiment, as shown in FIG. 4, the X axis is set in the front-rear direction of the vehicle body of the host vehicle SW, and the Y axis is set in the vehicle width direction perpendicular to the X axis. In the description of the present embodiment, the coordinate system sets the origin of the X coordinate system as the attachment position of the
上記座標系を設定することで、自車両SWの位置と速度とを(XV、YV、VVY、VVY)=(0、0、vVX、0)といった形式で表記することができるようになる。
また、障害物SMの位置と速度とを(XB、YB、VBX、VBY)=(xB、yB、0、0)といった形式で表記することができるようになる。
縦方向速度vVXは、縦方向速度vVXに比べて横方向速度vVYが十分に小さいとみなせれば、非駆動輪の車輪速で近似することができる。従って、縦方向速度vVXは、非駆動輪にとりつけた車速センサ2の検出値から求めることができる。
By setting the coordinate system, the position and speed of the host vehicle SW can be expressed in the form of (X V , Y V , V VY , V VY ) = (0, 0, v VX , 0). It becomes like this.
Further, the position and speed of the obstacle SM can be expressed in the form of (X B , Y B , V BX , V BY ) = (x B , y B , 0, 0).
The vertical speed v VX can be approximated by the wheel speed of the non-driven wheels if the horizontal speed v VY can be considered sufficiently smaller than the vertical speed v VX . Accordingly, the longitudinal speed v VX can be obtained from the detection value of the
また、障害物SMの縦方向位置xB、横方向位置yBは、カメラ1から取得できる。
また、自車両SWの運動状態を表す状態量として、ヨー角θ、操舵角δfが重要な物理量であると考える。これらの自車両SWの運動状態を記述する物理量は、次に説明するようにセンサの検出信号を処理することによって、具体的な値を取得できる。
すなわち、これらの物理量のうち、ヨー角θに関しては、道路が直線であると仮定すれば、道路境界と自車両SWの向いている方向とのなす角を、カメラ1が撮影した自車両SWの前方の道路状況を画像処理によって推定することで求めることができる。
Further, the vertical position x B and the horizontal position y B of the obstacle SM can be acquired from the
Further, it is considered that the yaw angle θ and the steering angle δ f are important physical quantities as state quantities representing the motion state of the host vehicle SW. These physical quantities describing the motion state of the host vehicle SW can be obtained with specific values by processing the detection signals of the sensors as described below.
That is, among these physical quantities, regarding the yaw angle θ, if it is assumed that the road is a straight line, the angle between the road boundary and the direction in which the host vehicle SW faces is the angle of the host vehicle SW taken by the
操舵角δは、操舵角センサ3から取得することができる。
次に、ステップS102では、自車両SWと障害物SMとが干渉する可能性の有無によって処理を分岐する。障害物SMと干渉する可能性の有無を判定する方法としては、例えば、現在から設定時間TCJ後までの間に、自車両SWの走行領域に障害物SMが侵入するか否かによって判定する方法を利用可能である。自車両SWの走行領域とは、現在から設定時間TCJ後までの間に、自車両SWが走行する道路上の領域である。
具体的には、まず、自車両SWの縦方向速度vVXおよび障害物SMの縦方向位置xBに基づき、下記(1)式に従って設定時間TCJを算出する。
TCJ=xB/vVX ………(1)
次に、算出した設定時間TCJに基づいて、当該設定時間TCJ後における障害物SMの横方向位置yB(TCJ)を算出する。
The steering angle δ can be acquired from the
Next, in step S102, the process branches depending on the possibility of interference between the host vehicle SW and the obstacle SM. As a method for determining whether or not there is a possibility of interfering with the obstacle SM, for example, the determination is made based on whether or not the obstacle SM enters the traveling area of the host vehicle SW between the present time and after the set time T CJ. A method is available. The travel area of the host vehicle SW is an area on the road on which the host vehicle SW travels from the present to the time after the set time T CJ .
Specifically, first, based on the longitudinal speed v VX of the host vehicle SW and the longitudinal position x B of the obstacle SM, the set time T CJ is calculated according to the following equation (1).
T CJ = x B / v VX (1)
Next, based on the calculated set time T CJ , the lateral position y B (T CJ ) of the obstacle SM after the set time T CJ is calculated.
次に、算出した横方向位置yB(TCJ)の絶対値|yB(TCJ)|が設定値YTH未満であるか否かを判定する。設定値YTHとは、自車両SWの走行領域への障害物SMの侵入を検出するためのしきい値である。例えば、自車両SW幅と障害物SM幅の合計値の半分の値よりも大きな値を利用可能である。そして、横方向位置の絶対値|yB(TCJ)|が設定値YTH未満であると判定した場合には、自車両SWの走行領域に障害物SMが侵入すると判定し(YES)、ステップS103に移行する。一方、横方向位置の絶対値|yB(TCJ)|が設定値YTH以上であると判定した場合には、自車両SWの走行領域に障害物SMが侵入しない(NO)、つまり、運転者による障害物回避操作を支援する必要がないと判定し、処理を終了する。 Next, it is determined whether or not the absolute value | y B (T CJ ) | of the calculated lateral position y B (T CJ ) is less than the set value Y TH . The set value Y TH is a threshold value for detecting the intrusion of the obstacle SM into the traveling area of the host vehicle SW. For example, a value larger than half of the total value of the own vehicle SW width and the obstacle SM width can be used. If it is determined that the absolute value | y B (T CJ ) | of the lateral position is less than the set value Y TH, it is determined that the obstacle SM has entered the travel area of the host vehicle SW (YES), The process proceeds to step S103. On the other hand, when it is determined that the absolute value | y B (T CJ ) | of the lateral position is equal to or larger than the set value Y TH , the obstacle SM does not enter the traveling area of the host vehicle SW (NO), that is, It is determined that it is not necessary to support the obstacle avoidance operation by the driver, and the process is terminated.
次に、ステップS103では、カメラ1の検出特性により当該カメラ1の検出結果に含まれる検出誤差、つまり、障害物SMの位置座標(xB、yB)の検出誤差の性質に基づいて、自車両SWの周囲における障害物SMの存在確率分布を推定する。障害物SMの存在確率分布としては、例えば、図5および図6に示すように、(μx、μY)で最高確率となり、(μx、μY)から遠ざかるにつれて存在確率が漸減する2次元の正規分布を利用可能である。μxはX軸方向における平均値であり、μYはY軸方向における平均値である。
Next, in step S103, based on the detection error included in the detection result of the
図5および図6は、障害物SMの存在確率分布を示すグラフである。
具体的には、カメラ1には、障害物SMが遠いほど、障害物SMの位置座標(xB、yB)の検出誤差が増大する特性がある。それゆえ、本実施形態では、障害物SMの縦方向位置xBを平均値μXに設定し、横方向位置yBを平均値μyに設定し、自車両SWと障害物SMとの間の距離Rs(=(XB 2+YB 2)1/2)に応じて分散値σX 2、σY 2を設定する。
5 and 6 are graphs showing the existence probability distribution of the obstacle SM.
Specifically, the
これにより、自車両SWと障害物SMとの間の距離Rsが遠いほど、障害物SMの存在確率分布の最高値および当該最高値の周辺の存在確率が低減する。
ここで、平均値μX、μyおよび分散値σX 2、σY 2は、(R、θ)座標系を設定することで、自車両SWと障害物SMとの間の距離Rsの関数で表記することができる。それゆえ、障害物SMの存在確率分布f(X,Y,0)は、関数μX(Rs)、μY(Rs)、σY(Rs)2、σX(Rs)2に基づき、下記(2)式のように表記することができる。
f(X,Y,0)=N(μX(Rs),μY(Rs),σx(Rs)2,σY(Rs)2) ………(2)
Thereby, the maximum value of the existence probability distribution of the obstacle SM and the existence probability around the highest value decrease as the distance R s between the host vehicle SW and the obstacle SM increases.
Here, the average values μ X , μ y and variance values σ X 2 , σ Y 2 are set to the distance R s between the host vehicle SW and the obstacle SM by setting the (R, θ) coordinate system. Can be expressed as a function. Therefore, the existence probability distribution f (X, Y, 0) of the obstacle SM has functions μ X (R s ), μ Y (R s ), σ Y (R s ) 2 , σ X (R s ) 2. Can be expressed as the following equation (2).
f (X, Y, 0) = N (μ X (R s ), μ Y (R s ), σ x (R s ) 2 , σ Y (R s ) 2 ) ……… (2)
関数μX(Rs)、μY(Rs)、σY(Rs)2、σX(Rs)2は、車両用運転支援装置の設計段階で見積もった、距離Rsに対する障害物SMの存在確率の分布を用いて設定する。
次に、ステップS104では、障害物SMの存在確率分布f(X,Y,0)と自車両SWの将来の走行経路とに基づいて操舵支援トルクを算出する。そして、操舵支援トルクの付与を指示する信号をステアリングアクチュエータ7に出力する。
The functions μ X (R s ), μ Y (R s ), σ Y (R s ) 2 , and σ X (R s ) 2 are obstacles to the distance R s estimated at the design stage of the vehicle driving support device. This is set using the distribution of SM existence probabilities.
Next, in step S104, the steering assist torque is calculated based on the existence probability distribution f (X, Y, 0) of the obstacle SM and the future travel route of the host vehicle SW. Then, a signal instructing application of steering assist torque is output to the
次に、上記ステップS104で行う、上記操舵支援トルクの算出方法を、図面を参照して説明する。
図7は、操舵支援トルクを算出する処理を示すフローチャートである。
図7に示すように、まず、そのステップS201では、自車両SWの将来の走行経路を算出する。
具体的には、まず、自車両SWの将来の走行経路を算出するために、自車両SWの運動を記述するモデルを導入する。ここでは、自車両SWの運動を記述するモデルとして、四輪車両の運動を二輪車両の運動で近似する二輪モデルを使用する。
Next, the calculation method of the steering assist torque performed in step S104 will be described with reference to the drawings.
FIG. 7 is a flowchart showing a process for calculating the steering assist torque.
As shown in FIG. 7, first, in step S201, a future travel route of the host vehicle SW is calculated.
Specifically, first, in order to calculate the future travel route of the host vehicle SW, a model describing the motion of the host vehicle SW is introduced. Here, a two-wheel model that approximates the movement of a four-wheel vehicle by the movement of a two-wheel vehicle is used as a model that describes the movement of the host vehicle SW.
この二輪モデルは、走行速度が一定で、ヨー角θが十分に小さく、横方向速度vVYが縦方向速度vVXと比較して十分に小さく、タイヤ横力の飽和特性が顕著に現れない運動状態では、下記(3)式のように近似することができる。
dxV/dt=vcos(β+θ)
dyV/dt=vsin(β+θ) ………(3)
dθ/dt=γ
dβ/dt=-γ+[2Kfαf+2Krαr]/MVV
dγ/dt=[2LfKfαf-2LrKrαr]/I
αf=β+Lfγ/VV-δf/NG
αr=β-Lfγ/VV
In this two-wheel model, the running speed is constant, the yaw angle θ is sufficiently small, the lateral speed v VY is sufficiently smaller than the longitudinal speed v VX, and the tire lateral force saturation characteristic does not appear remarkably. In the state, it can be approximated as the following equation (3).
dx V / dt = vcos (β + θ)
dy V / dt = vsin (β + θ) ……… (3)
dθ / dt = γ
dβ / dt = -γ + [2K f α f + 2K r α r ] / MV V
dγ / dt = [2L f K f α f -2L r K r α r ] / I
α f = β + L f γ / V V -δ f / N G
α r = β-L f γ / V V
図8は、自車両SWの状態量を説明するための平面図である。
ただし、図8に示すように、βはすべり角であり、γはヨーレイトである。また、Mは車両質量であり、Iは車両ヨー慣性モーメントであり、Lfは車両重心から前輪軸までの距離であり、Lrは車両重心から後輪軸までの距離である。さらに、Kfは前輪コーナリングパワー係数であり、Krは後輪コーナリングパワー係数である。また、αfは前輪5FL、5FRのタイヤすべり角であり、αrは後輪5RL、5RRのタイヤすべり角である。さらに、NGは、操舵角δfを前輪5FL、5FRの転舵角に変換する際のギア比である。
FIG. 8 is a plan view for explaining state quantities of the host vehicle SW.
However, as shown in FIG. 8, β is a slip angle and γ is a yaw rate. M is the vehicle mass, I is the vehicle yaw moment of inertia, Lf is the distance from the vehicle center of gravity to the front wheel axis, and Lr is the distance from the vehicle center of gravity to the rear wheel axis. Further, Kf is a front wheel cornering power coefficient, and Kr is a rear wheel cornering power coefficient. Α f is the tire slip angle of the front wheels 5FL and 5FR, and α r is the tire slip angle of the rear wheels 5RL and 5RR. Furthermore, NG is a gear ratio when the steering angle δ f is converted into the turning angles of the front wheels 5FL and 5FR.
また、上記(3)式は、下記(4)式のようにまとめることができる。
dxV/dt=fV(xV、uV) ………(4)
xV=(xV、yV、θ、β、γ)
uV=(δf)
以上のようにして導入した二輪モデルおよび操舵角δfを用い、現在から設定時間TT後までの間の状態ベクトルxV (t)を予測するものとして、t=0、Δt、2Δt、…、TT−Δt、TTまで、上記(4)式に従って状態ベクトルxV (t)を算出する。算出した状態ベクトルxV (t)の時系列は、自車両SWの将来の走行経路を表す。
Moreover, said (3) Formula can be put together like following (4) Formula.
dx V / dt = f V (x V , u V ) (4)
x V = (x V , y V , θ, β, γ)
u V = (δ f )
Using a two-wheel model and the steering angle [delta] f introduced as described above, as to predict the state vector x V between now and after the
次に、ステップS202では、前記ステップS201で算出した自車両SWの将来の走行経路上から、障害物SMの存在確率の最大値Pmを抽出する。
具体的には、まず、前記ステップS103で設定した障害物SMの存在確率分布を参照し、前記ステップS201で算出した自車両SWの将来の走行経路上の各地点(xV (t)、yV(t))に対して、障害物SMの存在確率を算出する。そして、算出した存在確率のうち、最大のものを最大値Pm(=maxf(xV(t)、yV(t),t))として抽出する。
Next, in step S202, the maximum value P m of the presence probability of the obstacle SM is extracted from the future travel route of the host vehicle SW calculated in step S201.
Specifically, first, referring to the existence probability distribution of the obstacle SM set in step S103, each point (x V (t), y on the future travel route of the host vehicle SW calculated in step S201 is calculated. V (t)), the presence probability of the obstacle SM is calculated. Then, the maximum one of the calculated existence probabilities is extracted as the maximum value P m (= maxf (x V (t), y V (t), t)).
次に、ステップS203では、算出した障害物SMの存在確率の最大値Pmに対して、当該最大値Pmが大きいか小さいかを判断するレベリングを行う。最もシンプルな方法として、予め存在確率のレベルを何段階かで設定しておき、最大値Pmがどのレベルに属するのかを判別する方法が考えられる。
具体的には、まず、前記ステップS202で設定した障害物SMの存在確率の最大値Pmが、予め設定した複数段階のレベルのいずれに属するかを判別する。
Next, in step S203, it performs the maximum value P m of the existence probability of the obstacle computed SM, the leveling of determining whether the maximum value P m is large or small. The most simple method, may be set the level of the pre-existence probability in several steps, it can be considered a method for determining whether belongs to which level the maximum value P m.
Specifically, first, it is determined whether the maximum value P m of the presence probability of the obstacle SM set in step S202 belongs to a plurality of preset levels.
次に、判別したレベルが、設定レベルPmTH以上であるか否かを判定する。設定レベルPmTHとは、障害物SMの存在確率の最大値Pmが大きいか小さいか判定するためのしきい値である。そして、設定レベルPmTH以上であると判定した場合には、障害物SMの存在確率の最大値Pmが大きいと判定する。一方、設定レベルPmTH未満であると判定した場合には、当該最大値Pmが小さいと判定する。 Next, it is determined whether or not the determined level is equal to or higher than the set level P mTH . The set level P mTH is a threshold value for determining whether the maximum value P m of the presence probability of the obstacle SM is large or small. Then, it is determined if it is determined that the set level P MTH or more, a large maximum value P m of the existence probability of an obstacle SM. On the other hand, when it is determined that it is less than the set level P mTH, it is determined that the maximum value P m is small.
次に、ステップS204では、レベリング結果に基づいて操舵支援トルクを設定する。
具体的には、まず、前記ステップS203で障害物SMの存在確率の最大値Pmが大きいと判定した場合には、自車両SWが障害物SMの存在確率の高い領域を走行すると判定し、操舵支援トルクの絶対値を比較的大きい値THIGHに設定する。一方、前記ステップS203で障害物SMの存在確率の最大値Pmが小さいと判定した場合には、自車両SWが障害物SMの存在確率の低い領域を走行すると判定し、操舵支援トルクの絶対値を比較的小さい値TLOW(<THIGH)に設定する。
Next, in step S204, a steering assist torque is set based on the leveling result.
Specifically, first, when it is determined in step S203 that the maximum value P m of the presence probability of the obstacle SM is large, it is determined that the host vehicle SW travels in an area where the presence probability of the obstacle SM is high, The absolute value of the steering assist torque is set to a relatively large value T HIGH . On the other hand, if it is determined in step S203 that the maximum value P m of the presence probability of the obstacle SM is small, it is determined that the host vehicle SW travels in a region where the presence probability of the obstacle SM is low, and the absolute value of the steering assist torque is determined. Set the value to a relatively small value T LOW (<T HIGH ).
次に、操舵角δfを切り増すことで得られる操舵角δf’を算出する。そして、算出した操舵角δf’に基づいて、上記ステップS201およびS202のフローを実行し、障害物SMの存在確率の最大値Pm(δf’)を算出する。
次に、算出した最大値Pm(δf’)が、障害物SMの存在確率の最大値Pm(δf)よりも小さいか否かを判定する。そして、最大値Pm(δf)よりも小さい場合には、操舵支援トルクの方向を切り増し方向に設定する。一方、最大値Pm(δf)以上である場合には、操舵支援トルクの方向を切り戻し方向に設定する。
次に、設定した操舵支援トルクの付与を指示する信号をステアリングアクチュエータ7に出力する。
Then, to calculate the steering angle [delta] f 'obtained by increasing off steering angle [delta] f. Then, based on the calculated steering angle δ f ′, the flow of steps S201 and S202 is executed to calculate the maximum value P m (δ f ′) of the presence probability of the obstacle SM.
Next, it is determined whether or not the calculated maximum value P m (δ f ′) is smaller than the maximum value P m (δ f ) of the existence probability of the obstacle SM. If the value is smaller than the maximum value P m (δ f ), the direction of the steering assist torque is increased and set to the increasing direction. On the other hand, if the value is equal to or greater than the maximum value P m (δ f ), the direction of the steering assist torque is set to the switchback direction.
Next, a signal instructing application of the set steering assist torque is output to the
(動作)
定期的に、各センサからの信号に基づき、自車両SWの運動状態や障害物情報、道路環境情報を取得し、同一の座標上に展開した情報に変換する。その同一座標に展開した情報によって、自車両SWの周辺における障害物SMの存在確率分布を推定する。
続いて、自車両SWの将来の走行経路を算出する。そして、将来の走行経路のうち、障害物SMの存在確率が最も高くなる位置での当該存在確率の最大値Pmを抽出する。
続いて、抽出した最大値Pmが大きいか小さいかを判定する。最大値Pmが大きいと判定すると、比較的大きい操舵支援トルクTHIGHの付与を指示する信号をステアリングアクチュエータ7に出力する。一方、最大値Pmが小さいと判定すると、比較的小さい操舵支援トルクTLOWの付与を指示する信号をステアリングアクチュエータ7に出力する。
(Operation)
Periodically, based on signals from each sensor, the movement state, obstacle information, and road environment information of the host vehicle SW are acquired and converted into information developed on the same coordinates. The existence probability distribution of the obstacle SM around the host vehicle SW is estimated based on the information developed on the same coordinates.
Subsequently, the future travel route of the host vehicle SW is calculated. Then, the maximum value P m of the existence probability at a position where the existence probability of the obstacle SM is highest in the future travel route is extracted.
Subsequently, it is determined whether the extracted maximum value P m is large or small. If it is determined that the maximum value P m is large, a signal instructing application of a relatively large steering assist torque T HIGH is output to the
以上のことが定期的に繰り返される。
これによって、各時刻における操舵支援トルクを算出・制御することができる。この結果、運転者による障害物回避操作の支援を実現することができる。
この実施形態では、自車両SWから遠方に障害物SMを検出した場合には、カメラ1の検出特性により検出誤差が大きくなる。そのため、障害物SMの存在確率分布を平面状に広げて障害物SMの存在確率が低下する。それゆえ、自車両SWと障害物SMとの干渉に余裕があるシーンでは、運転者の操作を妨げない程度の支援量となる。
ここで、本実施形態では、図2の車速センサ2が自車両状態検出手段を構成する。以下同様に、図2の操舵角センサ3が操作状態検出手段を構成する。また、カメラ1が障害物検出手段を構成する。さらに、図2の回避支援コントローラ4が存在確率分布推定手段を構成する。
The above is repeated periodically.
Thereby, the steering assist torque at each time can be calculated and controlled. As a result, it is possible to realize assistance for the obstacle avoidance operation by the driver.
In this embodiment, when the obstacle SM is detected far away from the host vehicle SW, the detection error increases due to the detection characteristics of the
Here, in this embodiment, the
(本実施形態の効果)
(1)本実施形態では、障害物検出手段が、自車両の周囲の障害物の位置を検出する。また、存在確率分布推定手段が、検出した位置および障害物検出手段の特性により当該位置に含まれる検出誤差の性質に基づいて、自車両の周囲における障害物の存在確率分布を推定する。そして、回避支援手段が、推定した存在確率分布に基づいて、運転者による障害物回避操作を支援する。
(Effect of this embodiment)
(1) In the present embodiment, the obstacle detection means detects the position of the obstacle around the host vehicle. The existence probability distribution estimation means estimates the existence probability distribution of the obstacle around the host vehicle based on the detected position and the characteristics of the obstacle detection means based on the nature of the detection error included in the position. Then, the avoidance support means supports the obstacle avoidance operation by the driver based on the estimated existence probability distribution.
そのため、例えば、障害物検出手段の特性により検出結果に含まれる検出誤差、つまり、障害物の位置の検出誤差が大きい場合に、障害物の存在確率を低減することができる。それゆえ、障害物回避操作の支援量を低減できる。その結果、運転者による障害物回避操作に当該回避操作の支援が干渉することを抑制できる。
したがって、運転者による障害物回避操作をより適切に支援できるようになる。
Therefore, for example, when the detection error included in the detection result due to the characteristic of the obstacle detection means, that is, the detection error of the position of the obstacle is large, the probability of existence of the obstacle can be reduced. Therefore, the support amount for the obstacle avoidance operation can be reduced. As a result, it is possible to suppress the assistance of the avoidance operation from interfering with the obstacle avoidance operation by the driver.
Therefore, the driver can more appropriately support the obstacle avoidance operation.
(2)また、存在確率分布推定手段が、自車両と障害物との間の距離が遠い場合、当該距離が近い場合と比較して、障害物の存在確率分布の最高値および当該最高値の周辺の存在確率を低減する。
そのため、例えば、障害物検出手段に、障害物が遠いほど検出結果に含まれる検出誤差が増大するという特性がある場合に、自車両と障害物との間の距離が遠いときに、障害物の存在確率を低減できる。それゆえ、障害物が実際と異なる位置に存在すると誤検出し、誤検出した障害物と自車両との干渉の可能性が高いと誤判断することを防止できる。
(2) In addition, when the existence probability distribution estimation means has a long distance between the host vehicle and the obstacle, the highest value of the obstacle existence probability distribution and the highest value of the obstacle are compared with the case where the distance is short. Reduce the existence probability of the surroundings.
Therefore, for example, when the obstacle detection means has a characteristic that the detection error included in the detection result increases as the obstacle is further away, when the distance between the own vehicle and the obstacle is far away, The existence probability can be reduced. Therefore, it is possible to prevent erroneous detection that an obstacle is present at a position different from the actual position and erroneously determining that there is a high possibility of interference between the detected obstacle and the host vehicle.
(第2実施形態)
次に、本発明の第2実施形態について図面を参照しつつ説明する。なお、上記各実施形態と同様な構成などについては同一の符号を使用する。
本実施形態の基本的な車両構成は、図9に示すように上記第1実施形態と同様である。
ただし、ジャイロセンサ9を備えている。ジャイロセンサ9は、自車両SWの重心位置に発生するロールレート、ピッチレイトλおよびヨーレイトγを検出する。例えば、水晶振動子や半導体等を用いて構成したものを利用可能である。そして、検出信号を回避支援コントローラ4に出力する。
(Second Embodiment)
Next, a second embodiment of the present invention will be described with reference to the drawings. In addition, the same code | symbol is used about the same structure as said each embodiment.
The basic vehicle configuration of this embodiment is the same as that of the first embodiment as shown in FIG.
However, a
図10に、以上の装置構成を機能別にまとめたブロック図を示す。
本実施形態では、自車両状態検出手段は、車速センサ2およびジャイロセンサ9によって構成する。そして、車速センサ2およびジャイロセンサ9で検出した信号を統合的に処理して、自車両SWの運動状態に関する情報を得る機能を実現する。
回避支援コントローラ4は、回避経路生成手段としての用途を兼ねている。そして、存在確率分布検出手段で得た情報に基づき、回避経路を生成する機能を実現する。
回避支援手段は、操作状態検出手段、および回避経路演算手段で得た情報に基づき、運転者による障害物回避操作を支援する機能をステアリングアクチュエータ7で実現する。
FIG. 10 shows a block diagram in which the above-described device configuration is summarized by function.
In the present embodiment, the host vehicle state detection means is constituted by the
The
The avoidance support means realizes a function of supporting the obstacle avoidance operation by the driver by the
次に、回避支援コントローラ4の処理について図面を参照して説明する。
図11は、回避支援コントローラ4の処理を示すフローチャートである。
図12は、想定する場面の一例を示す平面図である。
ここでは、具体性を持たせて処理を分かりやすくするために、図12に示す場面を想定して説明する。図12に示す場面では、自車両SWが直線道路上を走行しているときに、自車両SWの前方に左側から横断する歩行者を検出した場面を想定している。なお、障害物SMの左右のいずれにも自車両SWが通り抜け可能なスペースがあるものとする。
なお、図11の処理は、設定したサンプリング周期で繰り返し実行する。
Next, processing of the
FIG. 11 is a flowchart showing the process of the
FIG. 12 is a plan view showing an example of an assumed scene.
Here, in order to make the processing easy to understand by giving concreteness, description will be made assuming the scene shown in FIG. The scene shown in FIG. 12 assumes a scene in which a pedestrian crossing from the left in front of the host vehicle SW is detected when the host vehicle SW is traveling on a straight road. It is assumed that there is a space where the host vehicle SW can pass through on either side of the obstacle SM.
Note that the processing in FIG. 11 is repeatedly executed at the set sampling cycle.
図11に示すように、まず、そのステップS301では、各種センサが検出した信号をメモリ上に読み込む。そして、自車両SWの運動状態、自車両SWの操作状態、障害物SMの位置、および障害物SMとの間の距離を、統一した座標系上の値として算出する。
上記座標系を設定することで、自車両SWの位置と速度とを(XV、YV、VVX、VVY)=(0、0、vVX、0)といった形式で表記することができるようになる。
As shown in FIG. 11, first, in step S301, signals detected by various sensors are read into a memory. Then, the movement state of the host vehicle SW, the operation state of the host vehicle SW, the position of the obstacle SM, and the distance between the obstacle SM are calculated as values on a unified coordinate system.
By setting the coordinate system, the position and speed of the host vehicle SW can be expressed in the form (X V , Y V , V VX , V VY ) = (0, 0, v VX , 0). It becomes like this.
また、障害物SMの位置と速度とを(XB、YB、VBX、VBY)=(xB、yB、0、vBY)といった形式で表記することができるようになる。
障害物SMの横方向速度vBYは、カメラ1から得ることができる。
ピッチレイトλおよびヨーレイトγは、ジャイロセンサ9から得ることができる。
次に、ステップS302では、自車両SWと障害物SMとが干渉する可能性の有無によって処理を分岐する。障害物SMと干渉する可能性の有無を判定する方法としては、例えば、現在から設定時間TCJ後までの間に、自車両SWの走行領域に障害物SMが侵入するか否かによって判定する方法を利用可能である。
Further, the position and speed of the obstacle SM can be expressed in the form of (X B , Y B , V BX , V BY ) = (x B , y B , 0, v BY ).
The lateral speed v BY of the obstacle SM can be obtained from the
The pitch rate λ and the yaw rate γ can be obtained from the
Next, in step S302, the process branches depending on whether or not the own vehicle SW and the obstacle SM may interfere with each other. As a method for determining whether or not there is a possibility of interfering with the obstacle SM, for example, the determination is made based on whether or not the obstacle SM enters the traveling area of the host vehicle SW between the present time and after the set time T CJ. A method is available.
具体的には、まず、自車両SWの縦方向速度vVXおよび障害物SMの縦方向位置xBに基づき、前記(1)式に従って設定時間TCJを算出する。
次に、算出した設定時間TCJに基づいて、当該設定時間TCJ後における障害物SMの横方向位置yB(TCJ)+vBY×TCJを算出する。
次に、算出した横方向位置yB(TCJ)+vBY×TCJの絶対値|yB(TCJ)+vBY×TCJ|が設定値YTH未満であるか否かを判定する。そして、横方向位置の絶対値|yB(TCJ)+vBY×TCJ|が設定値YTH未満であると判定した場合には、自車両SWの走行領域に障害物SMが侵入すると判定し(YES)、ステップS303に移行する。一方、横方向位置の絶対値|yB(TCJ)+vBY×TCJ|が設定値YTH以上であると判定した場合には、自車両SWの走行領域に障害物SMが侵入しない(NO)、つまり、運転者による障害物回避操作を支援する必要がないと判定し、処理を終了する。
Specifically, first, based on the longitudinal speed v VX of the host vehicle SW and the longitudinal position x B of the obstacle SM, the set time T CJ is calculated according to the equation (1).
Then, based on the set time T CJ calculated, the lateral position y B (T CJ) of the obstacle SM after the set time T CJ + v to calculate the BY × T CJ.
Next, it is determined whether or not the absolute value of the calculated lateral position y B (T CJ ) + v BY × T CJ | y B (T CJ ) + v BY × T CJ | is less than the set value Y TH. To do. If it is determined that the absolute value | y B (T CJ ) + v BY × T CJ | of the lateral position is less than the set value Y TH , the obstacle SM enters the traveling area of the host vehicle SW. Determination is made (YES), and the process proceeds to step S303. On the other hand, the absolute value of the lateral position | y B (T CJ) + v BY × T CJ | when it is determined that is the set value Y TH or more, the traveling area of the own vehicle SW obstacle SM does not enter (NO), that is, it is determined that it is not necessary to support the obstacle avoidance operation by the driver, and the process ends.
次に、ステップS303では、カメラ1の検出特性により当該カメラ1の検出結果に含まれる検出誤差の性質に基づいて、自車両SWの周囲における障害物SMの存在確率分布を推定する。障害物SMの存在確率分布としては、例えば、図13(a)(b)に示すように、(μx、μY)で最高確率となり、(μx、μY)から遠ざかるにつれて存在確率が漸減する2次元の正規分布を利用可能である。
Next, in step S303, the existence probability distribution of the obstacle SM around the host vehicle SW is estimated based on the nature of the detection error included in the detection result of the
図13は、障害物SMの存在確率分布を示すグラフである。
具体的には、カメラ1には、自車両SWのピッチ方向への運動が大きいほど、障害物SMの縦方向位置xBの検出誤差が増大する特性がある。それゆえ、本実施形態では、自車両SWがピッチ運動を行っていない場合(λ=0)には、障害物SMの縦方向位置xBを平均値μXに設定する。一方、自車両SWがピッチ運動を行っている場合には(λ≠0)、障害物SMの縦方向位置xBと異なる値を平均値μXに設定し、自車両SWがピッチ運動を行っていない場合に比べ、分散値σX 2を比較的大きな値に設定する。
FIG. 13 is a graph showing the existence probability distribution of the obstacle SM.
Specifically, the
これにより、自車両SWのピッチ方向への運動が大きいほど、自車両SWの縦方向における障害物SMの存在確率分布の最高値および当該最高値の周辺の存在確率が低減する。
また、カメラ1には、自車両SWのヨー方向への運動が大きいほど、障害物SMの横方向位置yBの検出誤差が増大する特性がある。それゆえ、本実施形態では、自車両SWがヨー運動を行っていない場合(γ=0)には、障害物SMの横方向位置yBを平均値μYに設定する。一方、自車両SWがヨー運動を行っている場合(γ≠0)には、障害物SMの横方向位置yBと異なる値を平均値μXに設定し、自車両SWがヨー運動を行っていない場合に比べ、分散値σY 2を比較的大きな値に設定する。
Thereby, the greater the movement of the host vehicle SW in the pitch direction, the lower the maximum value of the presence probability distribution of the obstacle SM in the vertical direction of the host vehicle SW and the presence probability around the maximum value.
The
これにより、自車両SWのヨー方向への運動が大きいほど、自車両SWの横方向における障害物SMの存在確率分布の最高値および当該最高値の周辺の存在確率が低減する。
なお、本実施形態では、自車両SWのピッチレイトλおよびヨーレイトγに基づいて、障害物SMの存在確率分布を推定する例を示したが、他の構成を採用することもできる。例えば、自車両SWの加速度を検出する加速度センサを装備し、ピッチレイトλおよびヨーレイトγに代えて自車両SWの縦方向の加速度および横方向への加速度を用いて、障害物SMの存在確率分布を推定することもできる。
As a result, the greater the movement of the host vehicle SW in the yaw direction, the lower the maximum value of the obstacle probability distribution of the obstacle SM in the lateral direction of the host vehicle SW and the presence probability around the maximum value.
In the present embodiment, the example in which the existence probability distribution of the obstacle SM is estimated based on the pitch rate λ and the yaw rate γ of the host vehicle SW has been described, but other configurations may be employed. For example, an acceleration sensor for detecting the acceleration of the host vehicle SW is provided, and the presence probability distribution of the obstacle SM is obtained by using the vertical acceleration and the lateral acceleration of the host vehicle SW instead of the pitch rate λ and the yaw rate γ. Can also be estimated.
次に、ステップS304では、まず、前記ステップS303で推定した障害物SMの存在確率分布に基づいて、障害物SMの右方向を通過する回避経路を生成する。回避経路とは、自車両SWが障害物SMの存在確率が水準値THiよりも低い領域内を通過する経路である。各設定水準THiは、TH1>TH2>…>THNTHとなるように設定する。すなわち、設定水準THiは、変数iが大きいほど小さな値とする。 Next, in step S304, first, an avoidance route that passes in the right direction of the obstacle SM is generated based on the existence probability distribution of the obstacle SM estimated in step S303. The avoidance route is a route through which the host vehicle SW passes through an area where the existence probability of the obstacle SM is lower than the level value TH i . Each set level TH i is set so that TH 1 > TH 2 >...> TH NTH . That is, the setting level TH i is set to a smaller value as the variable i is larger.
次に、生成した回避経路を走行させる操舵角δfの集合(以下、「右回避舵角パターン」とも呼ぶ)δRi(i=1〜NTH)を算出する。ここで、設定水準THiは、変数iが大きいほど小さな値となるので、設定水準THiに応じて生成する右回避舵角パターンδRiは、変数iが大きいほど大きな値となる。具体的な算出方法については後述する。
次に、ステップS305では、まず、前記ステップS303で推定した障害物SMの在確率分布に基づいて、障害物SMの左方向を通過する回避経路を生成する。
Next, a set of steering angles δ f (hereinafter also referred to as “right avoidance steering angle pattern”) δ Ri (i = 1 to N TH ) for traveling along the generated avoidance route is calculated. The setting level TH i, because a smaller value as the variable i is greater, the right avoidance steering angle pattern [delta] Ri to generate in response to the set level TH i is becomes a larger value as the variable i. A specific calculation method will be described later.
Next, in step S305, first, an avoidance route that passes in the left direction of the obstacle SM is generated based on the probability distribution of the obstacle SM estimated in step S303.
次に、生成した回避経路を走行させる操舵角δfの集合(以下、「左回避舵角パターン」とも呼ぶ)δLiを算出する。
なお、左回避舵角パターンδLiも変数iが大きいほど大きな値となる。
次に、ステップS306では、前記ステップS304で算出した右回避舵角パターンδRiおよび前記ステップS305で算出した左回避舵角パターンδLiに基づいて、操舵支援トルクの特性を設定する。
Next, a set of steering angles δ f (hereinafter also referred to as “left avoidance steering angle pattern”) δ Li for traveling on the generated avoidance route is calculated.
Note that the left avoidance steering angle pattern δ Li also increases as the variable i increases.
Next, in step S306, the characteristics of the steering assist torque are set based on the right avoidance steering angle pattern δ Ri calculated in step S304 and the left avoidance steering angle pattern δ Li calculated in step S305.
図14は、NTHを2とした場合の操舵支援トルクの特性を示す図である。
具体的には、まず、前記ステップS304で算出した右回避舵角パターンδRiに基づいて、第1の支援トルク特性図を設定する。第1の支援トルク特性図とは、操舵角δfと操舵支援トルクとの関係を示す図である。例えば、図14(a)に示すように、操舵角δfに応じて、ステアリングコラム8に付与する操舵支援トルクを表す図を利用できる。第1の操舵支援トルク特性図は、右回避舵角パターンδRiと当該右回避舵角パターンδRiに対応した操舵支援トルクTRiからなる点(δRi、TRi)を2次元平面上にプロットし、プロットした各点(δRi、TRi)の間を直線で結ぶことによって生成する。操舵支援トルクTRiとは、右回避舵角パターンδRiに対応づけて設定した操舵支援トルクである。各操舵支援トルクTRiは、TR1>TR2>…>TRNTH(=0)となるように設定する。
FIG. 14 is a diagram showing the characteristics of the steering assist torque when N TH is 2. As shown in FIG.
Specifically, first, the first assist torque characteristic diagram is set based on the right avoidance steering angle pattern δ Ri calculated in step S304. The first support torque characteristic diagram is a diagram showing the relationship between the steering assist torque and the steering angle [delta] f. For example, as shown in FIG. 14 (a), according to the steering angle [delta] f, available diagram representing the steering assist torque applied to the
次に、前記ステップS305で算出した左回避舵角パターンδLiに基づいて、第2の支援トルク特性図を設定する。第2の支援トルク特性図とは、操舵角δfと操舵支援トルクとの関係を示す図である。例えば、図14(b)に示すように、左回避舵角パターンδLiと当該左回避舵角パターンδLiに対応した操舵支援トルクTLiからなる点(δLi、TLi)を平面上にプロットし、プロットした各点(δLi、TLi)の間を直線で結ぶことによって生成する。操舵支援トルクTLiとは、左回避舵角パターンδRiに対応づけて設定した操舵支援トルクである。各左回避舵角パターンδLiに対応した操舵支援トルクTLiは、TL1<TL2<…<TLNTH(=0)となるように設定する。 Next, a second assist torque characteristic diagram is set based on the left avoidance steering angle pattern δ Li calculated in step S305. The second support torque characteristic diagram is a diagram showing the relationship between the steering assist torque and the steering angle [delta] f. For example, as shown in FIG. 14B, a point (δ Li , T Li ) consisting of a left avoidance steering angle pattern δ Li and a steering assist torque T Li corresponding to the left avoidance steering angle pattern δ Li is placed on a plane. Plotting is performed by connecting the plotted points (δ Li , T Li ) with a straight line. The steering assist torque T Li is a steering assist torque set in association with the left avoidance steering angle pattern δ Ri . The steering assist torque T Li corresponding to each left avoidance steering angle pattern δ Li is set so that T L1 <T L2 <... <T LNTH (= 0).
次に、設定した第1および第2の支援トルク特性図をもとに、操舵角δfに対応する操舵支援トルクを算出する。そして、算出した操舵支援トルクの付与を指示する信号をステアリングアクチュエータ7に出力する。
以上のように、ステップS306では、自車両SWが障害物SMの存在確率の低い領域を走行するように、運転者が操舵を行っている場合には、操舵支援トルクを弱くする。これにより、操舵意志のある運転者に対しては、操舵操作を邪魔しない程度の操舵トルクを付与する。そのため、運転者の操作が主体となった支援を行うことができる。
Then, based on the first and second support torque characteristic diagram set, it calculates the steering assist torque corresponding to the steering angle [delta] f. Then, a signal instructing application of the calculated steering assist torque is output to the
As described above, in step S306, the steering assist torque is weakened when the driver is steering so that the host vehicle SW travels in an area where the presence probability of the obstacle SM is low. As a result, a steering torque that does not interfere with the steering operation is applied to a driver who intends to steer. For this reason, it is possible to provide assistance mainly based on the driver's operation.
図15は、応用例を示す図である。
なお、本実施形態では、操舵角δfと操舵支援トルクとの関係に基づいて、操舵支援トルクを算出する例を示したが、他の構成を採用することもできる。例えば、図15(a)(b)に示すように、操舵角速度dδf/dt(=δvf)と操舵支援トルクとの関係に基づいて、操舵支援トルクを算出することもできる。これにより、操舵角速度dδf/dtから運転者の操舵意思を図って、運転者にトルク支援を行うこともできる。
また、操舵角δfおよび操舵角速度dδf /dtの両方を用いて、運転者の操舵意思を図ることで、より運転者の回避意図を正確に把握することも可能である。
FIG. 15 is a diagram illustrating an application example.
In the present embodiment, based on the relationship between the steering assist torque and the steering angle [delta] f, although an example of calculating the steering assist torque, it is possible to employ other configurations. For example, as shown in FIGS. 15A and 15B, the steering assist torque can be calculated based on the relationship between the steering angular velocity dδ f / dt (= δ vf ) and the steering assist torque. As a result, it is possible to provide torque support to the driver by making the driver's steering intention based on the steering angular velocity dδ f / dt.
In addition, by using both the steering angle δ f and the steering angular velocity dδ f / dt, the driver's intention to steer can be achieved, so that the driver's intention to avoid can be grasped more accurately.
次に、上記ステップS303で行う、上記障害物SMの存在確率分布の推定方法を、図面を参照して説明する。
図16は、障害物SMの存在確率分布の算出方法を示すフローチャートである。
本実施形態では、障害物SMの存在確率分布を算出方法として、縦距離、横距離、ピッチレイト、ヨーレイトの4軸でマップ化する方法と、縦距離、横距離、ピッチレイト、ヨーレイトの関数として平均値と分散値とを表現する方法を併せたものを用いる。
図16に示すように、まず、そのステップS401では、制御マップを参照し、障害物SMの位置座標(xB、yB)に対応するインデックスを抽出する。制御マップとは、位置座標(X'B、Y'B)をインデックスとし、自車両SWと位置座標(X'B、Y'B)との間の距離をRsとした場合の分散値σx(Rs)2、σY(Rs)2を表すマップである。例えば、予めメモリに格納したマップデータ等が利用可能である。
Next, a method for estimating the presence probability distribution of the obstacle SM performed in step S303 will be described with reference to the drawings.
FIG. 16 is a flowchart showing a method for calculating the presence probability distribution of the obstacle SM.
In the present embodiment, as the calculation method of the existence probability distribution of the obstacle SM, a method of mapping with four axes of vertical distance, horizontal distance, pitch rate, and yaw rate, and a function of vertical distance, horizontal distance, pitch rate, and yaw rate are used. A combination of methods for expressing an average value and a variance value is used.
As shown in FIG. 16, first, in step S401, an index corresponding to the position coordinates (x B , y B ) of the obstacle SM is extracted with reference to the control map. The control map uses the position coordinates (X ′ B , Y ′ B ) as an index, and the variance value σ when the distance between the host vehicle SW and the position coordinates (X ′ B , Y ′ B ) is R s. It is a map showing x (R s ) 2 and σ Y (R s ) 2 . For example, map data stored in a memory in advance can be used.
図17は、制御マップのインデックスの抽出方法を示す図である。
具体的には、図17に示すように、制御マップのインデックス(X'B、Y'B)から、障害物SMの位置座標(xB、yB)に最も近いものを抽出する。
次に、ステップS402では、制御マップを参照し、抽出したインデックス(X'B、Y'B)に対応する分散値σX 2、σY 2を取得する。
FIG. 17 is a diagram illustrating a method of extracting a control map index.
Specifically, as shown in FIG. 17, the one closest to the position coordinate (x B , y B ) of the obstacle SM is extracted from the index (X ′ B , Y ′ B ) of the control map.
Next, in step S402, the control map is referred to, and dispersion values σ X 2 and σ Y 2 corresponding to the extracted indexes (X ′ B , Y ′ B ) are acquired.
また、インデックス(X'B、Y'B)のX成分X'Bを平均値μXとし、インデックス(X'B、Y'B)のY成分Y'Bを平均値μYに設定する。
次に、ステップS403では、ピッチレイトλおよびヨーレイトγに基づき、前記ステップS402で取得した分散値σX 2、σY 2および平均値μX、μYを補正する。
具体的には、ピッチレイトλおよびヨーレイトγに基づき、下記(5)式に従って平均値μX、μYおよび分散値σX 2、σY 2を補正する。
μX→μX+ΔμX(λ)
μY→μY+ΔμY(γ)
σX 2→σX 2+ΔσX 2(λ)
σY 2→σY 2+ΔσY 2(γ) ………(5)
0≦ΔσX 2(λ)、ΔσY 2(γ)≦1
Also, the index (X 'B, Y' B) X component X 'of the B and the average value mu X, the index (X' set B, Y and B 'B) Y component Y' of the average value mu Y.
In step S403, the dispersion values σ X 2 and σ Y 2 and the average values μ X and μ Y acquired in step S402 are corrected based on the pitch rate λ and the yaw rate γ.
Specifically, based on the pitch rate λ and the yaw rate γ, the average values μ X and μ Y and the dispersion values σ X 2 and σ Y 2 are corrected according to the following equation (5).
μ X → μ X + Δμ X (λ)
μ Y → μ Y + Δμ Y (γ)
σ X 2 → σ X 2 + Δσ X 2 (λ)
σ Y 2 → σ Y 2 + Δσ Y 2 (γ) (5)
0 ≦ Δσ X 2 (λ), Δσ Y 2 (γ) ≦ 1
ただし、ΔμX(λ)は、ピッチレイトλに応じて、障害物SMの縦方向位置xBと平均値μXとのオフセットを表す関数である。また、ΔσX 2(λ)は、ピッチレイトλに応じて分散値σX 2の増大量を表す関数である。同様に、ΔμY(λ)は、ヨーレイトγに応じて、障害物SMの横方向位置yBと平均値μYのオフセットを表す関数である。また、ΔσY 2(γ)は、ヨーレイトγに応じて分散値σY 2の増大量を表す関数である。
なお、関数ΔμX(λ)、ΔμY(γ)、ΔσX 2(λ)およびΔσY 2(γ)は、車両用運転支援装置の設計段階で見積もった、ピッチ方向およびヨー方向への運動時における障害物SMの存在確率の分布を用いて設定する。
However, Δμ X (λ) is a function representing an offset between the vertical position x B of the obstacle SM and the average value μ X according to the pitch rate λ. Further, Δσ X 2 (λ) is a function representing an increase amount of the dispersion value σ X 2 according to the pitch rate λ. Similarly, Δμ Y (λ) is a function representing an offset between the lateral position yB of the obstacle SM and the average value μ Y according to the yaw rate γ. Further, Δσ Y 2 (γ) is a function representing an increase amount of the dispersion value σ Y 2 according to the yaw rate γ.
The functions Δμ X (λ), Δμ Y (γ), Δσ X 2 (λ), and Δσ Y 2 (γ) are motions in the pitch direction and the yaw direction estimated at the design stage of the vehicle driving support device. It is set using the distribution of the existence probability of the obstacle SM at the time.
また、補正後のμX、μY、σx 2、σY 2に基づき、t=0における障害物SMの存在確率分布fX(X、0)、fY(Y、0)は、下記(6)式のように表記することができる。
fX(X、0)=N(μX、σx 2)
fY(Y、0)=N(μY、σY 2) ………(6)
ただし、N(μX、σx 2)は、平均値μX、分散値σX 2の1次元の正規分布であり、N(μY、σY 2)は、平均値μY、分散値σY 2の1次元の正規分布である。
ここまでの処理で、静止している障害物SMの検出誤差に基づいた存在確率が求まる。
Further, based on the corrected μ X , μ Y , σ x 2 , and σ Y 2 , the existence probability distributions f X (X, 0) and f Y (Y, 0) of the obstacle SM at t = 0 are as follows: It can be expressed as (6).
f X (X, 0) = N (μ X , σ x 2 )
f Y (Y, 0) = N (μ Y , σ Y 2 ) (6)
However, N (μ X , σ x 2 ) is a one-dimensional normal distribution having an average value μ X and a variance value σ X 2 , and N (μ Y , σ Y 2 ) is an average value μ Y , a variance value. This is a one-dimensional normal distribution of σ Y 2 .
By the processing so far, the existence probability based on the detection error of the stationary obstacle SM is obtained.
次に、ステップS404では、障害物SMが移動しているか否かを判定する。
前記ステップS403で説明した静止している障害物SMに対する存在確率は、確率密度関数として算出したが、これに移動速度の確率分布を併せて数学的な定義に基づいて導出しようとすると、数式表現が複雑になる。そのため、前記ステップS403に関する以下の説明では、数学的に導出した確率密度関数ではなく、実用上の観点で定義したものを、移動している障害物SMに対する存在確率として使用する。
Next, in step S404, it is determined whether or not the obstacle SM is moving.
The existence probability with respect to the stationary obstacle SM described in step S403 is calculated as a probability density function. Becomes complicated. For this reason, in the following description regarding step S403, not a mathematically derived probability density function but one defined from a practical viewpoint is used as the existence probability for the moving obstacle SM.
具体的には、まず、障害物SMの縦方向速度vBXおよび横方向速度vBYがいずれも設定値vTH未満であるか否かを判定する。設定値vTHとは、障害物SMが移動しているか否かを判定するためのしきい値である。例えば、「0」近傍の比較的小さな値を利用可能である。そして、障害物SMの縦方向速度vBXおよび横方向速度vBYがいずれも設定値vTH未満であると判定した場合には、障害物SMが静止していると判定し(YES)、処理を終了して復帰する。一方、縦方向速度vBXおよび横方向速度vBYの少なくともいずれかが設定値vTH以上であると判定した場合には、障害物SMが移動していると判定し(NO)、ステップS405に移行する。 Specifically, first, it is determined whether or not both the vertical speed v BX and the horizontal speed v BY of the obstacle SM are less than the set value v TH . The set value v TH is a threshold value for determining whether or not the obstacle SM is moving. For example, a relatively small value near “0” can be used. If it is determined that both the vertical speed v BX and the horizontal speed v BY of the obstacle SM are less than the set value v TH, it is determined that the obstacle SM is stationary (YES), and processing Exit and return. On the other hand, if it is determined that at least one of the vertical speed v BX and the horizontal speed v BY is greater than or equal to the set value v TH, it is determined that the obstacle SM is moving (NO), and the process proceeds to step S405. Transition.
なお、図12に示す場面では、障害物SMである歩行者が道路を横断しているので、ステップS404の判定は「NO」となり、ステップS405に移行する。
次に、ステップS405では、障害物SMの横方向速度vBYに含まれる検出誤差を考慮して、障害物SMの存在確率分布を修正する。
ここでは、障害物SMが等速移動していると仮定し、現在以前の速度情報も使用して移動速度の最大見積もり分v'BYmaxおよび最小見積もり分v'BYminを算出する。
In the scene shown in FIG. 12, since the pedestrian who is the obstacle SM crosses the road, the determination in step S404 is “NO”, and the process proceeds to step S405.
Next, in step S405, the existence probability distribution of the obstacle SM is corrected in consideration of the detection error included in the lateral speed v BY of the obstacle SM.
Here, it is assumed that the obstacle SM is moving at a constant speed, and the maximum estimated portion v ′ BYmax and the minimum estimated portion v ′ BYmin of the moving speed are calculated using the speed information before the present.
図18は、障害物SMの横方向速度vBYの変化状態を示すグラフである。
図18に示すように、障害物SMの移動速度は、検出誤差を含んだ形で所定時間間隔ごとに取得する。そして、現在から設定時間TCJ前までの間における障害物SMの横方向速度vBYのうち、最大値vBYmaxおよび最小値vBYminをメモリ上に記録しておく。そして、記録した最大値vBYmaxおよび最小値vBYminに基づき、下記(7)式に従って移動速度の最大見積もり分v'BYmaxおよび最小見積もり分v'BYminを算出する。
v'BYmax=(vBYmax+vBYmin)/2+κ[vBYmax-(vBYmax+vBYmax)/2]
v'BYmax=(vBYmax+vBYmin)/2-κ[vBYmax-(vBYmax+vBYmax)/2] ………(7)
0≦κ≦1
ただし、κは、設計パラメータである。κが1の場合には、V'BXmax=VBXmax、V'Bymax=vBYmaxとなり、そのままメモリ内の値を使用することになる。
FIG. 18 is a graph showing a change state of the lateral speed v BY of the obstacle SM.
As shown in FIG. 18, the moving speed of the obstacle SM is acquired at predetermined time intervals in a form including detection errors. Then, the maximum value v BYmax and the minimum value v BYmin are recorded in the memory among the lateral speed v BY of the obstacle SM between the present time and before the set time T CJ . Then, based on the recorded maximum value v BYmax and minimum value v BYmin , the maximum estimated portion v ′ BYmax and the minimum estimated portion v ′ BYmin of the moving speed are calculated according to the following equation (7).
v ' BYmax = (v BYmax + v BYmin ) / 2 + κ [v BYmax- (v BYmax + v BYmax ) / 2]
v ' BYmax = (v BYmax + v BYmin ) / 2-κ [v BYmax- (v BYmax + v BYmax ) / 2] ……… (7)
0 ≦ κ ≦ 1
Where κ is a design parameter. When κ is 1, V ′ BXmax = V BXmax and V ′ Bymax = v BYmax and the value in the memory is used as it is.
図19および図20は、障害物SMの存在確率分布を示すグラフである。
図19(a)に示すように、障害物SMが最大見積もり分v'BYmaxで移動した場合には、現在からt秒後の障害物SMの存在確率分布の平均値μYmaxは、前記ステップS403で補正した平均値μYに基づき、下記(8)式のように表記することができる。
μYmax=μY+t×vBYmax ………(8)
19 and 20 are graphs showing the existence probability distribution of the obstacle SM.
As shown in FIG. 19A, when the obstacle SM moves by the maximum estimated amount v ′ BYmax , the average value μ Ymax of the existence probability distribution of the obstacle SM after t seconds from the present is calculated in the above-described step S403. in based on the average value mu Y corrected, can be expressed as follows (8).
μ Ymax = μ Y + t × v BYmax (8)
また、障害物SMが、横方向速度VBYの最小見積もり分v'BYminで移動した場合には、現在からt秒後の障害物SMの存在確率分布の平均値μYminは、前記ステップS403で補正した平均値μYに基づき、下記(9)式のように表記することができる。
μYmin=μY+t×vBYmin ………(9)
ここで、分散値σx 2、σY 2は、障害物SMが移動しても変動しないものとする。
Further, when the obstacle SM moves at the minimum estimated amount v ′ BYmin of the lateral velocity V BY , the average value μ Ymin of the existence probability distribution of the obstacle SM after t seconds from the present is obtained in step S403. Based on the corrected average value μY, it can be expressed as the following equation (9).
μ Ymin = μ Y + t × v BYmin (9)
Here, it is assumed that the variance values σ x 2 and σ Y 2 do not change even when the obstacle SM moves.
次に、算出した平均値μYmin、分散値σY 2の1次元の正規分布fmin、および算出した平均値μYmax、分散値σY 2の1次元の正規分布fmaxを設定する。
次に、図19(b)に示すように、設定した両正規分布fmin、fmaxの最大値の間が直線で結ばれるように当該両正規分布の最大値の間を補完する。補完後の障害物SMの存在確率分布fY(Y,t)は、下記(10)式のように表記することができる。
fY(Y,t)=N(μYmin、σY 2)、Y≦μYmin
fY(Y,t)=max[fY(μYmin、TCJ)、fY(μYmax、TCJ)]、μYmin<Y<μYmax
fY(Y,t)=N(μYmax、σY 2)、μYmin≦Y ………(10)
Next, a one-dimensional normal distribution f min of the calculated average value μ Ymin and variance value σ Y 2 and a one-dimensional normal distribution f max of the calculated average value μ Ymax and variance value σ Y 2 are set.
Next, as shown in FIG. 19B, the maximum values of both normal distributions are complemented so that the maximum values of the set normal distributions f min and f max are connected by a straight line. The existence probability distribution f Y (Y, t) of the obstacle SM after complementation can be expressed as the following equation (10).
f Y (Y, t) = N (μ Ymin , σ Y 2 ), Y ≦ μ Ymin
f Y (Y, t) = max [f Y (μ Ymin , T CJ )], f Y (μ Ymax , T CJ )], μ Ymin <Y <μ Ymax
f Y (Y, t) = N (μ Ymax , σ Y 2 ), μ Ymin ≦ Y (10)
障害物SMがY軸方向に移動している場合には上記(10)式で存在確率を推定する。
図12に示す場面では、障害物SMはX軸方向には移動していないので、上記(10)式は、下記(11)式のように表記することができる。
fY(X,TCJ)=N(μX、σX 2) ………(11)
When the obstacle SM is moving in the Y-axis direction, the existence probability is estimated by the above equation (10).
In the scene shown in FIG. 12, since the obstacle SM has not moved in the X-axis direction, the above equation (10) can be expressed as the following equation (11).
f Y (X, T CJ ) = N (μ X , σ X 2 ) (11)
また、上記(10)式および(11)式をまとめると、障害物SMの存在確率分布は、下記(12)式のように表記することができる。
f(X,Y,t)=N(μX、μYmin、σX 2、σY 2)/KNow、Y≦μYmin
f(X,Y,t)=max[fYa(μX、μYmin、σX 2、σY 2)、fYa(μX、μYmax、σX 2、σY 2)]/KNow、μYmin<Y<μYmax
f(X,Y,t)=N(μX、μYmax、σX 2、σY 2)/KNow、μYmin≦Y ………(12)
ただし、KNOWは、障害物SMの存在確率分布を正規化するための係数である。
なお、ここでは図12に示す場面に基づいて、障害物SMがY軸方向に移動している場合について説明したが、障害物SMがX軸方向に移動している場合にも、同様の手法で将来における障害物SMの存在確率分布の推定を行うことができる。
Further, by summarizing the above equations (10) and (11), the existence probability distribution of the obstacle SM can be expressed as the following equation (12).
f (X, Y, t) = N (μ X , μ Ymin , σ X 2 , σ Y 2 ) / K Now , Y ≦ μ Ymin
f (X, Y, t) = max [f Ya (μ X , μ Ymin , σ X 2 , σ Y 2 ), f Ya (μ X , μ Ymax , σ X 2 , σ Y 2 )] / K Now , Μ Ymin <Y <μ Ymax
f (X, Y, t) = N (μ X , μ Ymax , σ X 2 , σ Y 2 ) / K Now , μ Ymin ≦ Y (12)
Here, K NOW is a coefficient for normalizing the existence probability distribution of the obstacle SM.
Here, the case where the obstacle SM is moving in the Y-axis direction has been described based on the scene shown in FIG. 12, but the same method is also used when the obstacle SM is moving in the X-axis direction. Thus, it is possible to estimate the existence probability distribution of the obstacle SM in the future.
次に、上記ステップS304で行う、上記右回避舵角パターンδRiの算出方法を、図面を参照して説明する。
図21は、右回避舵角パターンδfを算出する処理を示すフローチャートである。
図21に示すように、まず、そのステップS501では、変数iが設定値NTHであるか否かを判定する。変数iは、後述するステップS502からS505までのフローの実行回数をカウントするための変数であり、この処理の開始時に1に設定する。そして、変数iが設定値NTHであると判定した場合には(YES)処理を終了して復帰する。一方、変数iが設定値NTHではないと判定した場合には(NO)ステップS502に移行する。
Next, the calculation method of the right avoidance steering angle pattern δ Ri performed in step S304 will be described with reference to the drawings.
Figure 21 is a flowchart illustrating a process for calculating the right avoidance steering angle pattern [delta] f.
As shown in FIG. 21, first, in the step S501, it determines whether the variable i is set value N TH. The variable i is a variable for counting the number of executions of a flow from steps S502 to S505 described later, and is set to 1 at the start of this process. If it is determined that the variable i is the set value NTH (YES), the process is terminated and the process returns. On the other hand, if it is determined that the variable i is not the set value N TH (NO), the process proceeds to step S502.
次に、ステップS502では、舵角パターンδf(t)を設定する。舵角パターンδf(t)としては、例えば、図22に示すように、切り増し動作および切り戻し動作が存在するような舵角パターンや一定舵角を利用可能である。図22のような操舵パターンを利用する例は後述するとし、ここでは、一定舵角での説明を行う。
具体的には、まず、舵角パターンδf(t)として、小さい正の一定値Δδを設定する。舵角パターンδf(t)の符号は、前輪5FL、5FRを右方向に転舵する操舵角を正値とし、前輪5FL、5FRを左方向に転舵する操舵角を負値とする。
Next, in step S502, a steering angle pattern δ f (t) is set. As the rudder angle pattern δ f (t), for example, as shown in FIG. 22, a rudder angle pattern or a constant rudder angle in which there is an increase operation and a return operation can be used. An example of using a steering pattern as shown in FIG.
Specifically, first, a small positive constant value Δδ is set as the steering angle pattern δ f (t). The sign of the steering angle pattern δ f (t) is a positive value for the steering angle for turning the front wheels 5FL, 5FR to the right, and a negative value for the steering angle for turning the front wheels 5FL, 5FR to the left.
次に、ステップS503では、前記ステップS502で設定した舵角パターンδf(t)で操舵した場合に、自車両SWが障害物SMの存在確率が設定水準THiよりも低い領域のみを走行することが可能か否かを判別する。
具体的には、まず、舵角パターンδf(t)に基づき、上記(4)式のように定義した二輪モデルに従って、自車両SWの将来の走行経路(xV(t)、yV(t))を算出する。
Next, in step S503, when the vehicle is steered with the steering angle pattern δf (t) set in step S502, the host vehicle SW travels only in a region where the presence probability of the obstacle SM is lower than the set level TH i. It is determined whether or not it is possible.
Specifically, first, based on the steering angle pattern δf (t), the future travel route (x V (t), y V (t )) Is calculated.
次に、前記ステップS303で設定した障害物SMの存在確率分布を参照し、算出した自車両SWの将来の走行経路(xV(t)、yV(t))上の各地点に対して、障害物SMの存在確率を算出する。そして、算出した存在確率から、最大のものを最大値Pm(=maxf(xV(t)、yV(t),t))として抽出する。
次に、算出した障害物SMの存在確率の最大値Pmが設定水準THiより小さいか否かを判定する。そして、設定水準THiよりも小さいと判定した場合には、障害物SMの存在確率が設定水準THiよりも低い領域のみを走行することが可能な回避経路を生成したと判定し(YES)、ステップS505に移行する。一方、設定水準THi以上であると判定した場合には、障害物SMの存在確率が設定水準THiよりも高い領域を通過する回避経路であると判定し(NO)、ステップS504に移行する。
Next, with reference to the existence probability distribution of the obstacle SM set in step S303, for each point on the calculated future travel route (x V (t), y V (t)) of the host vehicle SW. The existence probability of the obstacle SM is calculated. Then, the maximum value is extracted as the maximum value P m (= maxf (x V (t), y V (t), t)) from the calculated existence probability.
Next, it is determined whether or not the calculated maximum probability P m of the obstacle SM is smaller than the set level TH i . If it is determined that the vehicle is smaller than the set level TH i , it is determined that an avoidance route that can travel only in an area where the presence probability of the obstacle SM is lower than the set level TH i is generated (YES). The process proceeds to step S505. On the other hand, when it is determined that the set level TH i above, it is determined that the existence probability of an obstacle SM is avoidance path that passes through the region higher than the set level TH i (NO), the process proceeds to step S504 .
次に、ステップS504では、障害物SMの存在確率が設定水準THiよりも低い領域のみを走行ことができる回避経路を生成するように、下記(13)式に従って舵角パターンδf(t)を再設定する。その後、前記ステップS503に移行する。
δf(t)=δf(t)+Δδ ………(13)
一方、ステップS505では、前記ステップS502で設定した舵角パターンδf(t)を、右回避舵角パターンδRiとしてメモリに格納する。また、変数iに「1」を加算した値を、新しい変数iとする。その後、前記ステップS501に移行する。
なお、ステップS305で行う、上記左回避舵角パターンδLiの算出方法も、上記右回避舵角パターンδRiの算出方法と同様である。
ただし、Δδを負の値に設定する。また、前記ステップS502で設定した舵角パターンδf(t)は、左回避舵角パターンδLiとしてメモリに格納する。
Next, in step S504, the steering angle pattern δ f (t) is generated according to the following equation (13) so as to generate an avoidance route that can travel only in an area where the presence probability of the obstacle SM is lower than the set level TH i. To reset. Thereafter, the process proceeds to step S503.
δ f (t) = δ f (t) + Δδ (13)
On the other hand, in step S505, the steering angle pattern δ f (t) set in step S502 is stored in the memory as the right avoidance steering angle pattern δ Ri . A value obtained by adding “1” to the variable i is set as a new variable i. Thereafter, the process proceeds to step S501.
Note that the calculation method of the left avoidance steering angle pattern δ Li performed in step S305 is the same as the calculation method of the right avoidance steering angle pattern δ Ri .
However, Δδ is set to a negative value. The steering angle pattern δ f (t) set in step S502 is stored in the memory as the left avoidance steering angle pattern δ Li .
(動作)
以上の処理を所定の制御周期毎に繰り返すことで、各時刻における操舵支援トルクを算出・制御できる。この結果、運転者による障害物回避操作の支援を実現できる。
この実施形態では、自車両SWがヨー運動またはピッチ運動を行っている場合には、カメラ1の検出特性により検出誤差が大きくなる。そのため、障害物SMの存在確率分布を平面状に広げて障害物SMの存在確率を低減する。それゆえ、自車両SWと障害物SMとの干渉に余裕があるシーンでは、運転者の操作を妨げない程度の支援量となる。
ここで、本実施形態では、図10の車速センサ2が自車両状態検出手段を構成する。以下同様に、図10の操舵角センサ3が操作状態検出手段を構成する。また、カメラ1が障害物検出手段を構成する。さらに、図10の回避支援コントローラ4が存在確率分布推定手段および回避経路生成手段を構成する。また、操舵支援トルクが支援制御量を構成する。
(Operation)
By repeating the above processing every predetermined control cycle, the steering assist torque at each time can be calculated and controlled. As a result, an obstacle avoidance operation support by the driver can be realized.
In this embodiment, when the host vehicle SW is performing a yaw motion or a pitch motion, the detection error is increased due to the detection characteristics of the
Here, in the present embodiment, the
(本実施形態の効果)
(1)本実施形態では、存在確率分布推定手段が、自車両の横方向への運動およびヨー方向への運動の少なくとも一方の運動に基づき当該運動が大きい場合、当該運動が小さい場合と比較して、自車両の横方向における障害物の存在確率分布の最高値および当該最高値の周辺の存在確率を低減する。
そのため、例えば、障害物検出手段に、自車両の横方向への運動が大きいほど検出結果に含まれる検出誤差が増大するという特性がある場合に、自車両の横方向への運動が大きいときに、障害物の存在確率を低減できる。同様に、自車両のヨー方向への運動が大きいほど検出結果に含まれる検出誤差が増大するという特性がある場合に、自車両のヨー方向への運動が大きいときに、障害物の存在確率を低減できる。それゆえ、障害物が実際と異なる位置に存在すると誤検出し、誤検出した障害物と自車両との干渉の可能性が高いと誤判断することを防止できる。その結果、運転者に違和感を与えることを防止できる。
(Effect of this embodiment)
(1) In the present embodiment, when the existence probability distribution estimation means has a large movement based on at least one of the movement in the lateral direction and the movement in the yaw direction of the host vehicle, it is compared with the case in which the movement is small. Thus, the highest value of the obstacle existence probability distribution in the lateral direction of the host vehicle and the existence probability around the highest value are reduced.
Therefore, for example, when the obstacle detection means has a characteristic that the detection error included in the detection result increases as the movement of the host vehicle in the lateral direction increases, the movement of the host vehicle in the lateral direction is large. , The probability of obstacles can be reduced. Similarly, when there is a characteristic that the detection error included in the detection result increases as the movement of the host vehicle in the yaw direction increases, the probability of the obstacle being present is determined when the movement of the host vehicle in the yaw direction is large. Can be reduced. Therefore, it is possible to prevent erroneous detection that an obstacle is present at a position different from the actual position and erroneously determining that there is a high possibility of interference between the detected obstacle and the host vehicle. As a result, it is possible to prevent the driver from feeling uncomfortable.
(2)また、存在確率推定手段が、自車両の縦方向への運動およびピッチ方向への運動の少なくとも一方の運動に基づき当該運動が大きい場合、当該運動が小さい場合と比較して、自車両の縦方向における障害物の存在確率分布の最高値および当該最高値の周辺の存在確率を低減する。
そのため、例えば、障害物検出手段に、自車両の縦方向への運動が大きいほど検出結果に含まれる検出誤差が増大するという特性がある場合、自車両の縦方向への運動が大きいときに、障害物の存在確率を低減できる。同様に、自車両のピッチ方向への運動が大きいほど検出結果に含まれる検出誤差が増大するという特性がある場合、自車両のピッチ方向への運動が大きいときに、障害物の存在確率を低減できる。それゆえ、障害物が実際よりも近い位置に存在すると誤検出し、誤検出した障害物と自車両との干渉の可能性が高いと誤判断することを防止できる。その結果、運転者に違和感を与えることを防止できる。
(2) In addition, when the existence probability estimation means is large based on at least one of the movement in the vertical direction and the movement in the pitch direction of the own vehicle, the own vehicle is compared with the case where the movement is small. The maximum value of the obstacle existence probability distribution in the vertical direction and the existence probability around the highest value are reduced.
Therefore, for example, when the obstacle detection means has a characteristic that the detection error included in the detection result increases as the movement of the host vehicle in the vertical direction increases, when the movement of the host vehicle in the vertical direction is large, Obstacle existence probability can be reduced. Similarly, when there is a characteristic that the detection error included in the detection result increases as the movement of the host vehicle in the pitch direction increases, the probability of obstacles is reduced when the movement of the host vehicle in the pitch direction is large. it can. Therefore, it is possible to prevent erroneous detection that an obstacle is present at a position closer to the actual position and erroneously determining that there is a high possibility of interference between the detected obstacle and the host vehicle. As a result, it is possible to prevent the driver from feeling uncomfortable.
(3)さらに、回避支援手段が、自車両の将来の走行経路上における障害物の存在確率が高い場合、当該存在確率が低い場合と比較して、障害物回避操作を支援する支援制御量を増大する。
そのため、例えば、障害物の存在確率が高い領域に車両が侵入する場合には、回避操作に対する支援量を増大できる。その結果、自車両が障害物と干渉する可能性を低減でき、自車両と障害物との干渉をより適切に回避できる。
(3) Furthermore, when the avoidance support means has a high probability of existence of an obstacle on the future travel route of the host vehicle, the support control amount for supporting the obstacle avoidance operation is compared with the case where the existence probability is low. Increase.
Therefore, for example, when the vehicle enters an area where the existence probability of an obstacle is high, the support amount for the avoidance operation can be increased. As a result, the possibility that the host vehicle interferes with the obstacle can be reduced, and interference between the host vehicle and the obstacle can be more appropriately avoided.
(4)また、車両操作検出手段が、自車両の操舵角および操舵角速度の少なくともいずれかを検出する。
そのため、操舵角および操舵速度の少なくともいずれかに基づいて、運転者による障害物回避操作を支援することができる。それゆえ、例えば、操舵角または操舵速度により、運転者の操舵意思を図ることで、障害物回避操作をより適切に支援できるようになる。
(4) Further, the vehicle operation detection means detects at least one of the steering angle and the steering angular velocity of the host vehicle.
Therefore, the obstacle avoidance operation by the driver can be assisted based on at least one of the steering angle and the steering speed. Therefore, the obstacle avoidance operation can be more appropriately supported by, for example, the driver's intention to steer based on the steering angle or the steering speed.
(5)さらに、回避経路生成手段が、障害物の存在確率が設定値よりも低い領域内を通過する回避経路を生成する。また、回避支援手段が、自車両に回避経路を走行させる舵角パターンおよび自車両の操作状態に基づいて障害物回避操作を支援する支援制御量を設定する。
そのため、例えば、自車両が回避経路に沿って走行するように支援量を算出することで、自車両が障害物の存在確率が低い領域のみを走行するように、運転者による回避操作を支援することができる。その結果、将来において自車両と障害物とが干渉する可能性を考慮した、より的確な支援を行うことができる。
(5) Furthermore, the avoidance route generation means generates an avoidance route that passes through an area where the existence probability of the obstacle is lower than the set value. Further, the avoidance support means sets an assist control amount for supporting the obstacle avoidance operation based on the steering angle pattern that causes the host vehicle to travel the avoidance route and the operation state of the host vehicle.
Therefore, for example, by calculating the support amount so that the host vehicle travels along the avoidance route, the driver assists the avoidance operation so that the host vehicle travels only in the region where the obstacle existence probability is low. be able to. As a result, it is possible to provide more accurate support in consideration of the possibility of interference between the host vehicle and the obstacle in the future.
(第3実施形態)
次に、本発明の第3実施形態について図面を参照しつつ説明する。なお、上記各実施形態と同様な構成などについては同一の符号を使用する。
(構成)
本実施形態の基本的な車両構成は、図9に示すように上記第2実施形態と同様である。
ただし、カメラ1は、自車両SWの前方の道路境界を検出する役割も果たす。道路境界とは、自車両SWが走行している道路または走行車線の両脇を区切る境界線である。
図23に、以上の装置構成を機能別にまとめたブロック図を示す。
(Third embodiment)
Next, a third embodiment of the present invention will be described with reference to the drawings. In addition, the same code | symbol is used about the same structure as said each embodiment.
(Constitution)
The basic vehicle configuration of this embodiment is the same as that of the second embodiment as shown in FIG.
However, the
FIG. 23 shows a block diagram in which the above-described apparatus configuration is summarized by function.
本実施形態では、カメラ1は、道路境界検出手段としての用途も兼ねている。そして、カメラ1で撮像したイメージを画像処理して自車両SWの前方の道路境界に関する情報を抽出する機能を実現する。
回避経路生成手段は、自車両状態検出手段、障害物検出手段、存在確率分布検出手段、および道路境界検出手段で得た情報に基づき、回避経路を生成する機能を実現する。
In the present embodiment, the
The avoidance route generation means realizes a function of generating an avoidance route based on information obtained by the own vehicle state detection means, the obstacle detection means, the existence probability distribution detection means, and the road boundary detection means.
次に、回避支援コントローラ4の処理について図面を参照して説明する。
図24は、回避支援コントローラ4の処理を示すフローチャートである。
図25は、想定する場面の一例を示す平面図である。
ここでは、具体性を持たせて処理を分かりやすくするために、図25に示す場面を想定して説明する。図25に示す場面では、自車両SWが片側1車線の直線道路上を走行しているときに、自車両SWの前方に左側から横断する歩行者を検出した場面を想定している。なお、第1実施形態および第2実施形態では、障害物SMの左右のいずれにも自車両SWが通り抜け可能なスペースがあるものとしたが、図25に示す場面では、道路境界により、自車両SWが通り抜け可能なスペースが限られているものとする。
Next, processing of the
FIG. 24 is a flowchart showing processing of the
FIG. 25 is a plan view showing an example of an assumed scene.
Here, in order to give concreteness and make the processing easy to understand, description will be made assuming the scene shown in FIG. The scene shown in FIG. 25 assumes a scene in which a pedestrian crossing from the left side in front of the own vehicle SW is detected when the own vehicle SW is traveling on a straight road with one lane on one side. In the first embodiment and the second embodiment, the left and right sides of the obstacle SM have a space through which the host vehicle SW can pass. However, in the scene shown in FIG. It is assumed that the space through which the SW can pass is limited.
なお、図24の処理は、設定したサンプリング周期で繰り返し実行する。
図24に示すように、まず、そのステップS601では、各種センサが検出した信号をメモリ上に読み込む。そして、自車両SWの運動状態、自車両SWの操作状態、障害物SMの位置、および障害物SMとの間の距離を、統一した座標系上の値として算出する。
上記座標系を設定することで、道路の左端の道路境界の位置をY=YL、道路の右端の道路境界の位置をY=YRといった形式で表記することができる。
Note that the processing of FIG. 24 is repeatedly executed at the set sampling cycle.
As shown in FIG. 24, first, in step S601, signals detected by various sensors are read into the memory. Then, the movement state of the host vehicle SW, the operation state of the host vehicle SW, the position of the obstacle SM, and the distance between the obstacle SM are calculated as values on a unified coordinate system.
By setting the above coordinate system, the position of the road boundary at the left end of the road can be expressed in the form of Y = Y L and the position of the road boundary at the right end of the road in the form of Y = Y R.
道路の左端および右端の位置は、カメラ1による道路境界検出によって検出する。
次に、ステップS602では、自車両SWと障害物SMとが干渉する可能性の有無によって処理を分岐する。例えば、第1実施形態のステップS102と同様の処理や、第2実施形態のステップS302と同様の処理を利用できる。そして、自車両SWと障害物SMとが干渉する可能性があると判定した場合には(YES)ステップS603に移行する。一方、有無によって処理を分岐する。一方、自車両SWと障害物SMとが干渉する可能性がないと判定した場合には(NO)処理を終了する。
The positions of the left end and the right end of the road are detected by road boundary detection by the
Next, in step S602, the process branches depending on whether or not the host vehicle SW and the obstacle SM may interfere with each other. For example, a process similar to step S102 of the first embodiment or a process similar to step S302 of the second embodiment can be used. If it is determined that the host vehicle SW and the obstacle SM may interfere (YES), the process proceeds to step S603. On the other hand, the processing branches depending on the presence or absence. On the other hand, if it is determined that there is no possibility that the host vehicle SW and the obstacle SM interfere with each other, the (NO) process is terminated.
次に、ステップS603では、カメラ1の検出特性により当該カメラ1の検出結果に含まれる検出誤差の性質に基づいて、自車両SWの周囲における障害物SMの存在確率分布を推定する。例えば、第1実施形態のステップS103と同様の処理や、第2実施形態のステップS303と同様の処理を利用できる。
次に、ステップS604では、まず、前記ステップS603で算出した障害物SMの存在確率分布に基づいて、障害物SMの右方向を通過する回避経路を生成する。
Next, in step S603, the existence probability distribution of the obstacle SM around the host vehicle SW is estimated based on the detection error characteristics included in the detection result of the
Next, in step S604, first, an avoidance route that passes in the right direction of the obstacle SM is generated based on the existence probability distribution of the obstacle SM calculated in step S603.
次に、生成した回避経路を走行させる右回避舵角パターンδRiを算出する。
回避経路などの具体的な生成方法については後述する。
次に、ステップS605では、まず、前記ステップS603で推定した障害物SMの在確率分布に基づいて、障害物SMの左方向を通過する回避経路を生成する。
次に、生成した回避経路を走行させる左回避舵角パターンδLiを算出する。
次に、ステップS606では、前記ステップS604で算出した右回避舵角パターンδRi、および前記ステップS605で算出した左回避舵角パターンδLiに基づいて、操舵支援トルクの特性を設定する。
Next, a right avoidance steering angle pattern δ Ri for traveling on the generated avoidance route is calculated.
A specific method for generating the avoidance route will be described later.
Next, in step S605, first, an avoidance route that passes in the left direction of the obstacle SM is generated based on the probability distribution of the obstacle SM estimated in step S603.
Next, a left avoidance steering angle pattern δ Li for traveling on the generated avoidance route is calculated.
Next, in step S606, characteristics of the steering assist torque are set based on the right avoidance steering angle pattern δ Ri calculated in step S604 and the left avoidance steering angle pattern δ Li calculated in step S605.
図26は、NTHを4とした場合の操舵支援トルクの特性を示す図である。
具体的には、まず、前記ステップS604で算出した右回避舵角パターンδRiに基づいて第1の支援トルク特性図を設定する。第1の支援トルク特性図は、図26(a)に示すように、例えば、右回避舵角パターンδRiと当該右回避舵角パターンδRiに対応した操舵支援トルクTRiからなる点(δRi、TRi)を2次元平面上にプロットし、プロットした各点(δRi、TRi)の間を直線で結ぶことによって生成する。操舵支援トルクTRiは、TR1>TR2>…>TRNTHとなるように設定する。ここで、k番目の右回避舵角パターンδRkに対応する回避経路は道路境界内に収まるが、k+1番目の右回避舵角パターンδRk+1に対応する回避経路は道路境界内に収まらないとする。その場合、操舵支援トルクTRkを「0」とし、操舵支援トルクTRk+1、…、TRNTHを負の値とする。すなわち、操舵支援トルクTiは、TR1>TR2>…>TRk(=0)>…>TRNTHとなるように設定する。操舵支援トルクTiの符号は、前輪5FL、5FRを右方向に転舵する操舵支援トルクを正値とし、前輪5FL、5FRを左方向に転舵する操舵支援トルクを負値とする。
FIG. 26 is a diagram showing the characteristics of the steering assist torque when N TH is 4.
Specifically, first, a first assist torque characteristic diagram is set based on the right avoidance steering angle pattern δ Ri calculated in step S604. The first support torque characteristic diagram, as shown in FIG. 26 (a), for example, a point consisting of the steering assist torque T Ri corresponding to the right avoidance steering angle pattern [delta] Ri and the right avoidance steering angle pattern [delta] Ri ([delta] Ri , T Ri ) are plotted on a two-dimensional plane, and the plotted points (δ Ri , T Ri ) are connected by straight lines. The steering assist torque T Ri is set so that T R1 > T R2 >...> T RNTH . Here, the avoidance route corresponding to the kth right avoidance rudder angle pattern δRk falls within the road boundary, but the avoidance route corresponding to the (k + 1) th right avoidance rudder angle pattern δRk + 1 is within the road boundary. It will not fit. In this case, the steering assist torque T Rk is set to “0”, and the steering assist torques T Rk + 1 ,..., T RNTH are set to negative values. That is, the steering assist torque T i is, T R1> T R2> ... > T Rk (= 0)> ... set such that> T RNTH. The sign of the steering assist torque T i is the front wheel 5FL, a steering assist torque for steering the 5FR rightward to a positive value, the front wheel 5FL, a steering assist torque for steering the 5FR leftward to a negative value.
次に、前記ステップS605で算出した左回避舵角パターンδLiに基づいて第2の支援トルク特性図を設定する。第2の支援トルク特性図は、例えば、図26(b)に示すように、左回避舵角パターンδLiと当該左回避舵角パターンδLiに対応した操舵支援トルクTLiからなる点(δLi、TLi)を平面上にプロットし、プロットした各点(δLi、TLi)の間を直線で結ぶことによって生成する。操舵支援トルクTLiは、TL1<TL2<…<TLNTHとなるように設定する。ここで、k番目の左回避舵角パターンδLkに対応する回避経路は道路境界内に収まるが、k+1番目の左回避舵角パターンδLk+1に対応する回避経路は道路境界内に収まらないとする。その場合、操舵支援トルクTLkを「0」とし、操舵支援トルクTLk+1、…、TLNTHを正の値とする。すなわち、操舵支援トルクTLiは、TL1<TL2<…<TLk(=0)<…<TLNTHとなるように設定する。
次に、設定した第1および第2の支援トルク特性図をもとに、操舵角δfに対応する操舵支援トルクを算出する。そして、算出した操舵支援トルクの付与を指示する信号をステアリングアクチュエータ7に出力する。
Next, a second assist torque characteristic diagram is set based on the left avoidance steering angle pattern δ Li calculated in step S605. For example, as shown in FIG. 26 (b), the second assist torque characteristic diagram includes a left avoiding steering angle pattern δ Li and a point (δ including a steering assist torque T Li corresponding to the left avoiding steering angle pattern δ Li. Li , T Li ) are plotted on a plane, and the plotted points (δ Li , T Li ) are connected by straight lines. Steering assist torque T Li is set so that T L1 <T L2 <... < T LNTH. Here, the avoidance route corresponding to the kth left avoidance steering angle pattern δ Lk falls within the road boundary, but the avoidance route corresponding to the (k + 1) th left avoidance steering angle pattern δLk + 1 is within the road boundary. It will not fit. In this case, the steering assist torque T Lk is set to “0”, and the steering assist torques T Lk + 1 ,..., T LNTH are set to positive values. That is, the steering assist torque T Li is, T L1 <T L2 <... <T Lk (= 0) <... < set to be T LNTH.
Then, based on the first and second support torque characteristic diagram set, it calculates the steering assist torque corresponding to the steering angle [delta] f. Then, a signal instructing application of the calculated steering assist torque is output to the
以上のように、ステップS606では、回避経路が道路境界内に収まるか否かを考慮して操舵支援トルクの特性を設定する。例えば、図25および図26に示すように、障害物SMの左側のスペースが狭く、3番目の左回避舵角パターンδL3に対応する回避経路が道路境界内に収まらないとする。この場合、操舵角δfが左回避舵角パターンδL3に近いほど、自車両SWが道路境界内から逸脱する可能性が高くなる。そのため、操舵角δfが左回避舵角パターンδL3に近い場合には、操舵の切りすぎを知らせるための逆方向トルク、つまり、切り戻し方向への操舵支援トルクを付与する。また、4番目の右回避舵角パターンδR4に対応する回避経路が道路境界内に収まらないとする。とする。この場合、操舵角δfが右旋回経路δR4に近いほど、自車両SWが道路境界内から逸脱する可能性が高くなる。そのため、操舵角δfが右旋回経路δR4に近い場合には、逆方向トルク、つまり、切り戻し方向への操舵支援トルクを発生する。
なお、本実施形態では、操舵角δfに基づいて、操舵支援トルクを算出する例を示したが、他の構成を採用することもできる。例えば、操舵角δfおよび操舵角速度dδf/dtに基づいて、自車両SWの逸脱可能性をより適切に算出することもできる。
As described above, in step S606, the characteristic of the steering assist torque is set in consideration of whether or not the avoidance route is within the road boundary. For example, as shown in FIGS. 25 and 26, the space left obstacle SM is narrow, the third corresponding avoidance path to the left around the steering angle pattern [delta] L3 is not fit within the road boundary. In this case, as the steering angle [delta] f is close to the left around the steering angle pattern [delta] L3, possibly vehicle SW deviates from the road boundary becomes higher. Therefore, the steering angle [delta] f is the case close to the left around the steering angle pattern [delta] L3 is reverse torque for notifying cut too much steering, that is, to impart a steering assist torque in the steering back direction. Also, it is assumed that the avoidance route corresponding to the fourth right avoidance steering angle pattern δ R4 does not fall within the road boundary. And In this case, the closer the steering angle δ f is to the right turn route δ R4 , the higher the possibility that the host vehicle SW will depart from the road boundary. Therefore, when the steering angle [delta] f is close to the right turning path [delta] R4 is reverse torque, i.e., to generate a steering assist torque in the steering back direction.
In the present embodiment, based on the steering angle [delta] f, although an example of calculating the steering assist torque, it is possible to employ other configurations. For example, it is also possible based on the steering angle [delta] f and the steering angular velocity d? F / dt, to more properly calculate the deviation possibility of vehicle SW.
次に、上記ステップS604で行う、上記右回避舵角パターンδRiの算出方法を、図面を参照して説明する。
図27は、右回避舵角パターンを算出する処理を示すフローチャートである。
図27に示すように、まず、ステップS701では、変数iが設定値NTHであるか否かを判定する。変数iは、後述するステップS702からS706までのフローの実行回数をカウントするための変数であり、この処理の開始時に1に設定する。そして、変数iが設定値NTHであると判定した場合には(YES)処理を終了して復帰する。一方、変数iが設定値NTHではないと判定した場合には(NO)ステップS702に移行する。
Next, the calculation method of the right avoidance steering angle pattern δ Ri performed in step S604 will be described with reference to the drawings.
FIG. 27 is a flowchart illustrating a process for calculating a right avoidance steering angle pattern.
As shown in FIG. 27 is determined, first, in step S701, the whether or not the variable i is set value N TH. The variable i is a variable for counting the number of executions of a flow from steps S702 to S706 described later, and is set to 1 at the start of this process. If it is determined that the variable i is the set value NTH (YES), the process is terminated and the process returns. On the other hand, if it is determined that the variable i is not the set value N TH (NO), the process proceeds to step S702.
次にステップS702では、障害物回避のための舵角パターンδf '(k)を設定する。
本実施形態では、予め設定した舵角パターンδf(t)に、障害物回避操作の調整を行うためのゲインKδ設定を行うことで、舵角パターンδf '(k)を設定する。
舵角パターンδf(t)としては、操舵の切り返しから切り戻しまでの操作を行うことを踏まえて、図22に示すように、サイン状、三角状、台形状の舵角パターンδf(t)を利用可能である。切り返しを行うタイミングは、TCJを基準とし、ΔTXのパラメータを事前に調整することで設定する。
Next, in step S702, a steering angle pattern δ f ′ (k) for obstacle avoidance is set.
In the present embodiment, the steering angle pattern δ f ′ (k) is set by setting the gain Kδ for adjusting the obstacle avoidance operation to the steering angle pattern δ f (t) set in advance.
As the rudder angle pattern δ f (t), in consideration of performing the operation from turning back to turning back, as shown in FIG. 22, the rudder angle pattern δ f (t ) Is available. The timing for performing the switching is set by adjusting the parameter of ΔT X in advance with TCJ as a reference.
この舵角パターンδf(t)を適当なステップ数Nで分割して離散化を行い、各ステップ時点における舵角パターンδf(t)の値を算出する。これにより、以下に示すような、N個の時系列データを得ることができる。
δf(k)=[δf(0*2×(TCJ+ΔTX)N)、δf(1*2×(TCJ+ΔTX)N)、…、δf((N-1)*2×(TCJ+ΔTX)N)]
また、上記N個の時系列データに基づき、舵角パターンδf '(k)は、下記(14)式のように表記することができる。
δf'(k)=Kδ×δf(k) ………(14)
ただし、ゲインKδは、この処理の開始時に小さい正の値ΔKδに設定する。
The steering angle pattern δ f (t) is divided by an appropriate number of steps N and discretized, and the value of the steering angle pattern δ f (t) at each step is calculated. As a result, N pieces of time-series data as shown below can be obtained.
δ f (k) = [δ f (0 * 2 × (T CJ + ΔT X ) N), δ f (1 * 2 × (T CJ + ΔT X ) N), ..., δ f ((N-1 ) * 2 × (T CJ + ΔT X ) N)]
Further, based on the N pieces of time series data, the steering angle pattern δ f ′ (k) can be expressed as the following equation (14).
δ f '(k) = Kδ × δ f (k) (14)
However, the gain Kδ is set to a small positive value ΔKδ at the start of this process.
次に、ステップS703では、前記ステップS702で設定した舵角パターンδf '(k)で走行可能な経路表す経路が、道路境界内に収まっている経路であるか否かによって処理を分岐する。道路境界内に収まっている経路であるか否かによって処理を分岐する方法としては、例えば、舵角パターンδf '(k)によって自車両SWを操舵した場合に、現在から2×(TCJ+ΔTX)後までの間に、自車両SWが道路境界内から逸脱するか否かを判定する。 Next, in step S703, the process is branched depending on whether or not the route that can be traveled by the steering angle pattern δ f ′ (k) set in step S702 is a route that falls within the road boundary. As a method of branching depending on whether or not the route is within the road boundary, for example, when the host vehicle SW is steered by the steering angle pattern δ f ′ (k), 2 × ( TCJ Before + ΔT X ), it is determined whether or not the host vehicle SW deviates from the road boundary.
具体的には、まず、舵角パターンδf '(k)に基づき、上記(4)式に従って、自車両SWの将来の走行経路(xV(t)、yV(t))を算出する。そして、算出した将来の走行経路(xV(t)、yV(t))を回避経路(xV(t)、yV(t))とする。
次に、算出した回避経路(xV(t)、yV(t))上から、Y成分yV(k)の最小値ymin(=min(yV(k)))を抽出する。なお、逸脱の可能性があるのは道路の右端の道路境界であるので、最小値yminを抽出は、現在から2×(TCJ+ΔTX)後までのY成分yV * (k)を対象として行う。
Specifically, first, based on the steering angle pattern δ f ′ (k), the future travel route (x V (t), y V (t)) of the host vehicle SW is calculated according to the above equation (4). . The calculated future travel route (x V (t), y V (t)) is set as an avoidance route (x V (t), y V (t)).
Next, the minimum value y min (= min (yV (k))) of the Y component y V (k) is extracted from the calculated avoidance path (x V (t), y V (t)). Since it is the road boundary at the right end of the road that may deviate, the minimum value y min is extracted from the current Y component y V * (k) 2 × (T CJ + ΔT X ) To target.
次に、抽出した最小値yminが設定値YRより小さいか否かを判定する。設定値YRとは、道路の右端の道路境界の位置である。そして、設定値YRよりも小さいと判定した場合には、回避経路が道路境界内に収まっていると判定し(YES)、処理を終了して復帰する。一方、設定値YR以上であると判定した場合には、回避経路が道路境界内に収まっておらず、道路境界内から逸脱していると判定し(NO)、ステップS704に移行する。 Next, it is determined whether or not the extracted minimum value y min is smaller than the set value Y R. The set value Y R is the position of the road boundary at the right end of the road. If it is determined that it is smaller than the set value Y R , it is determined that the avoidance route is within the road boundary (YES), the process is terminated, and the process returns. On the other hand, if it is determined that the value is equal to or greater than the set value Y R, it is determined that the avoidance route is not within the road boundary and deviates from the road boundary (NO), and the process proceeds to step S704.
次に、ステップS704では、前記ステップS702で設定した舵角パターンδf '(k)で操舵した場合に、自車両SWが障害物SMの存在確率が設定水準THiよりも低い領域のみを走行することが可能か否かを判別する。
具体的には、まず、前記ステップS603で設定した障害物SMの存在確率分布を参照し、前記ステップS703で設定した回避経路(xV(t)、yV(t))上の各地点に対して、障害物SMの存在確率を算出する。そして、算出した存在確率のうち、最大のものを最大値Pm(=maxf(xV(t)、yV(t),t))として抽出する。
Next, in step S704, when the vehicle is steered with the steering angle pattern δ f ′ (k) set in step S702, the host vehicle SW travels only in an area where the presence probability of the obstacle SM is lower than the set level TH i. It is determined whether or not it is possible.
Specifically, first, referring to the existence probability distribution of the obstacle SM set in step S603, each point on the avoidance route (x V (t), y V (t)) set in step S703 is set. On the other hand, the existence probability of the obstacle SM is calculated. Then, the maximum one of the calculated existence probabilities is extracted as the maximum value P m (= maxf (x V (t), y V (t), t)).
次に、抽出した障害物SMの存在確率の最大値Pmが設定水準THiより小さいか否かを判定する。そして、設定水準THiよりも小さいと判定した場合には、障害物SMの存在確率が設定水準THiよりも低い領域のみを走行することが可能な回避経路を生成したと判定し(YES)、ステップS706に移行する。一方、設定水準THi以上であると判定した場合には、障害物SMの存在確率が設定水準THiよりも高い領域を通過する回避経路であると判定し(NO)、ステップS705に移行する。 Next, it is determined whether or not the maximum value P m of the presence probability of the extracted obstacle SM is smaller than the set level TH i . If it is determined that the vehicle is smaller than the set level TH i , it is determined that an avoidance route that can travel only in an area where the presence probability of the obstacle SM is lower than the set level TH i is generated (YES). The process proceeds to step S706. On the other hand, when it is determined that the set level TH i above, it is determined that the existence probability of an obstacle SM is avoidance path that passes through the region higher than the set level TH i (NO), the process proceeds to step S705 .
次に、ステップS705では、障害物SMの存在確率が設定水準THiよりも低い領域のみを走行ことができる回避経路を生成するように、下記(15)式に従ってゲインKδを再設定する。その後、前記ステップS703に移行する。
Kδ=Kδ+ΔKδ ………(15)
一方、ステップS706では、前記ステップS702で設定した舵角パターンδf '(k)を、右回避舵角パターンδRiとしてメモリに格納する。また、変数iに「1」を加算した値を、新しい変数iとする。その後、前記ステップS701に移行する。
Next, in step S705, the gain Kδ is reset according to the following equation (15) so as to generate an avoidance route that can travel only in an area where the presence probability of the obstacle SM is lower than the set level TH i . Thereafter, the process proceeds to step S703.
Kδ = Kδ + ΔKδ (15)
On the other hand, in step S706, the steering angle pattern δ f ′ (k) set in step S702 is stored in the memory as the right avoidance steering angle pattern δ Ri . A value obtained by adding “1” to the variable i is set as a new variable i. Thereafter, the process proceeds to step S701.
なお、ステップS605で行う、上記左回避舵角パターンδLiの算出方法も、上記右回避舵角パターンδRiの算出方法と同様である。
ただし、ΔKδを負の値に設定する。また、前記ステップS702で設定した舵角パターンδf '(k)は、左回避舵角パターンδLiとしてメモリに格納する。
ここで、本実施形態では、図23の車速センサ2およびジャイロセンサ9が自車両状態検出手段を構成する。以下同様に、図23の操舵角センサ3が操作状態検出手段を構成する。また、カメラ1が障害物検出手段を構成する。さらに、図23の回避支援コントローラ4が存在確率分布推定手段および回避経路生成手段を構成する。
The calculation method of the left avoidance steering angle pattern δ Li performed in step S605 is the same as the calculation method of the right avoidance steering angle pattern δ Ri .
However, ΔKδ is set to a negative value. The steering angle pattern δ f ′ (k) set in step S702 is stored in the memory as the left avoidance steering angle pattern δ Li .
Here, in the present embodiment, the
(本実施形態の効果)
(1)本実施形態では、回避経路生成手段が、回避経路として、道路境界内に収まっている経路を生成する。
そのため、自車両が道路境界内から逸脱しない回避経路を生成することができる。それゆえ、例えば、生成した回避経路に沿って自車両が走行するように支援量を算出することで、自車両が道路境界内に留るように運転者による回避操作を支援することができる。その結果、運転者が障害物を回避するために必要以上の操舵をした場合にも、自車両が道路境界内から逸脱することを防止することができる。
(Effect of this embodiment)
(1) In the present embodiment, the avoidance route generation means generates a route that falls within the road boundary as the avoidance route.
Therefore, it is possible to generate an avoidance route in which the own vehicle does not deviate from the road boundary. Therefore, for example, by calculating the support amount so that the host vehicle travels along the generated avoidance route, the avoidance operation by the driver can be supported so that the host vehicle stays within the road boundary. As a result, even when the driver steers more than necessary to avoid an obstacle, the vehicle can be prevented from deviating from the road boundary.
(第4実施形態)
次に、本発明の第4実施形態について図面を参照しつつ説明する。なお、上記各実施形態と同様な構成などについては同一の符号を使用する。
図28は、第4実施形態の車両用運転支援装置を装備した自車両SWの装置構成の概念図である。
本実施形態の基本的な車両構成は図28に示すように上記第2実施形態と同様である。
ただし、加速度センサ10を備えている。加速度センサ10は、自車両SWに発生する特定の方向の加速度を検出する。例えば、圧電素子等を用いて構成したものを利用可能である。そして、検出信号を回避支援コントローラ4に出力する。
図29に、以上の装置構成を機能別にまとめたブロック図を示す。
本実施形態では、自車両状態検出手段は、車速センサ2、ジャイロセンサ9および加速度センサ10によって構成する。そして、各センサで検出した信号を統合的に処理して、自車両SWの運動状態に関する情報を得る機能を実現する。
(Fourth embodiment)
Next, a fourth embodiment of the present invention will be described with reference to the drawings. In addition, the same code | symbol is used about the same structure as said each embodiment.
FIG. 28 is a conceptual diagram of the device configuration of the host vehicle SW equipped with the vehicle driving support device of the fourth embodiment.
The basic vehicle configuration of the present embodiment is the same as that of the second embodiment as shown in FIG.
However, the
FIG. 29 is a block diagram summarizing the above-described device configuration by function.
In the present embodiment, the host vehicle state detection means is constituted by the
次に、回避支援コントローラ4の処理について図面を参照して説明する。
図30は、回避支援コントローラ4の処理を示すフローチャートである。
ここでは、具体性を持たせて処理を分かりやすくするために、図25に示す場面を想定して説明する。図25に示す場面では、自車両SWが片側1車線の直線道路上を走行しているときに、自車両SWの前方に左側から横断する歩行者を検出した場面を想定している。なお、第1実施形態および第2実施形態では、障害物SMの左右のいずれにも自車両SWが通り抜け可能なスペースがあるものとしたが、図25に示す場面では、道路境界により、自車両SWが通り抜け可能なスペースが限られているものとする。また、自車両SWの運転者は、障害物SMの存在を認識し、制動操作を行っているものとする。
Next, processing of the
FIG. 30 is a flowchart showing processing of the
Here, in order to give concreteness and make the processing easy to understand, description will be made assuming the scene shown in FIG. The scene shown in FIG. 25 assumes a scene in which a pedestrian crossing from the left side in front of the own vehicle SW is detected when the own vehicle SW is traveling on a straight road with one lane on one side. In the first embodiment and the second embodiment, the left and right sides of the obstacle SM have a space through which the host vehicle SW can pass. However, in the scene shown in FIG. It is assumed that the space through which the SW can pass is limited. In addition, it is assumed that the driver of the host vehicle SW recognizes the presence of the obstacle SM and performs a braking operation.
なお、図30の処理は、設定したサンプリング周期で繰り返し実行する。
図30に示すように、まず、そのステップS801では、各種センサが検出した信号をメモリ上に読み込む。そして、自車両SWの運動状態、自車両SWの操作状態、障害物SMの位置、および障害物SMとの間の距離を、統一した座標系上の値として算出する。
自車両SWの減速度aVXは、加速度センサ10から得ることができる。
Note that the processing in FIG. 30 is repeatedly executed at the set sampling cycle.
As shown in FIG. 30, first, in step S801, signals detected by various sensors are read into the memory. Then, the movement state of the host vehicle SW, the operation state of the host vehicle SW, the position of the obstacle SM, and the distance between the obstacle SM are calculated as values on a unified coordinate system.
The deceleration a VX of the host vehicle SW can be obtained from the
次に、ステップS802では、現在から設定時間後までの間に、自車両SWと障害物SMとが干渉する可能性の有無を判別する。具体的な判別方法については後述する。
次に、ステップS803では、カメラ1の検出特性により当該カメラ1の検出結果に含まれる検出誤差の性質に基づいて、自車両SWの周囲における障害物SMの存在確率分布を推定する。例えば、第1実施形態のステップS103と同様の処理や、第2実施形態のステップS303と同様の処理を利用できる。
Next, in step S802, it is determined whether there is a possibility that the host vehicle SW and the obstacle SM interfere between the present time and the set time. A specific determination method will be described later.
Next, in step S803, the existence probability distribution of the obstacle SM around the host vehicle SW is estimated based on the detection error characteristics included in the detection result of the
例えば、図19に示すように、障害物SMが等速移動している場合には、障害物SMの存在確率fc(X、Y、t)は、下記(16)式のように表記できる。
fc(X,Y,t)=N(μX、μYC、σX 2、σY 2) ………(16)
また、障害物SMが加速移動している場合には、障害物SMの存在確率fa(X、Y、t)は、下記(17)式のように表記できる。
fa(X,Y,t)=N(μX、μYC、σX 2、σY 2)、Y≦μYC
fa(X,Y,t)=max[fYa(μX、μYC、σX 2、σY 2)、fYa(μX、μYA、σX 2、σY 2)]、μYC<Y<μYA
fa(X,Y,t)=N(μX、μYA、σX 2、σY 2)、μYA≦Y ………(17)
For example, as shown in FIG. 19, when the obstacle SM is moving at a constant speed, the existence probability f c (X, Y, t) of the obstacle SM can be expressed as the following equation (16). .
f c (X, Y, t) = N (μ X , μ YC , σ X 2 , σ Y 2 ) (16)
When the obstacle SM is moving at an accelerated speed, the existence probability f a (X, Y, t) of the obstacle SM can be expressed as the following equation (17).
f a (X, Y, t) = N (μ X , μ YC , σ X 2 , σ Y 2 ), Y ≦ μ YC
f a (X, Y, t) = max [f Ya (μ X , μ YC , σ X 2 , σ Y 2 ), f Ya (μ X , μ YA , σ X 2 , σ Y 2 )], μ YC <Y <μ YA
f a (X, Y, t) = N (μ X , μ YA , σ X 2 , σ Y 2 ), μ YA ≦ Y (17)
さらに、障害物SMが減速移動している場合には、障害物SMの存在確率fd(X、Y、t)は、下記(18)式のように表記できる。
fd(X,Y,t)=N(μX、μYD、σX 2、σY 2)、Y≦μYD
fd(X,Y,t)=max[fYa(μX、μYD、σX 2、σY 2)、fYa(μX、μYC、σX 2、σY 2)]、μYD<Y<μYC
fd(X,Y,t)=N(μX、μYD、σX 2、σY 2)、μYC≦Y ………(18)
ここで、上記(18)式は、連続な関数であり、X、Yに関して微分可能である。
また、上記(16)〜(18)式に基づき、障害物SMの移動を考慮した場合の障害物SMの存在確率は、下記(19)式のようにまとめることができる。
f(X,Y,t)=[Kd×fd(X,Y,t)+fc(X,Y,t)+Ka×fa(X,Y,t)]/[KNow(1+Kd+ Ka)] ………(19)
Further, when the obstacle SM is moving at a reduced speed, the existence probability f d (X, Y, t) of the obstacle SM can be expressed as the following equation (18).
f d (X, Y, t) = N (μ X , μ YD , σ X 2 , σ Y 2 ), Y ≦ μ YD
f d (X, Y, t) = max [f Ya (μ X , μ YD , σ X 2 , σ Y 2 ), f Ya (μ X , μ YC , σ X 2 , σ Y 2 )], μ YD <Y <μ YC
f d (X, Y, t) = N (μ X , μ YD , σ X 2 , σ Y 2 ), μ YC ≦ Y (18)
Here, the above equation (18) is a continuous function and can be differentiated with respect to X and Y.
Further, based on the above equations (16) to (18), the existence probability of the obstacle SM when considering the movement of the obstacle SM can be summarized as the following equation (19).
f (X, Y, t) = [K d × f d (X, Y, t) + f c (X, Y, t) + K a × f a (X, Y, t)] / [K Now (1 + Kd + Ka)] ……… (19)
次に、ステップS804では、まず、前記ステップS803で算出した障害物SMの存在確率分布に基づいて、障害物SMの右方向を通過する回避経路を生成する。
次に、生成した回避経路を走行させる右回避舵角パターンδRiを算出する。
回避経路などの具体的な生成方法については後述する。
次に、ステップS805では、まず、前記ステップS803で推定した障害物SMの在確率分布に基づいて、障害物SMの左方向を通過する回避経路を生成する。
次に、生成した回避経路を走行させる左回避舵角パターンδLiを算出する。
次に、ステップS806では、前記ステップS804で算出した右回避舵角パターンδRiおよび前記ステップS805で設定した左回避舵角パターンδLiに基づいて、操舵支援トルクの特性を設定する。
Next, in step S804, first, an avoidance route that passes in the right direction of the obstacle SM is generated based on the existence probability distribution of the obstacle SM calculated in step S803.
Next, a right avoidance steering angle pattern δ Ri for traveling on the generated avoidance route is calculated.
A specific method for generating the avoidance route will be described later.
Next, in step S805, first, an avoidance route that passes in the left direction of the obstacle SM is generated based on the probability distribution of the obstacle SM estimated in step S803.
Next, a left avoidance steering angle pattern δ Li for traveling on the generated avoidance route is calculated.
Next, in step S806, the characteristics of the steering assist torque are set based on the right avoidance steering angle pattern δ Ri calculated in step S804 and the left avoidance steering angle pattern δ Li set in step S805.
図31は、NTHを4とした場合の右回避舵角パターンδRiを示す図である。
図32は、操舵支援トルクの特性を示す図である。
図31に示すように、現在時刻t0における右回避舵角パターンδRi(t0)はいずれも同じ値となる。そのため、本実施形態では、現在時刻t0からΔt秒後の右回避舵角パターンδRi(t0+Δt)を利用して、操舵支援トルクの特性を設定する。
FIG. 31 is a diagram showing a right avoidance steering angle pattern δ Ri when N TH is 4.
FIG. 32 is a diagram illustrating characteristics of the steering assist torque.
As shown in FIG. 31, the right avoidance steering angle pattern δ Ri (t 0 ) at the current time t 0 has the same value. Therefore, in the present embodiment, the characteristic of the steering assist torque is set using the right avoidance steering angle pattern δ Ri (t 0 + Δt) after Δt seconds from the current time t 0 .
具体的には、まず、前記ステップS804で算出した右回避舵角パターンδRi(t0+Δt)に基づいて第1の支援トルク特性図を設定する。第1の支援トルク特性図は、図32に示すように、例えば、右回避舵角パターンδRi(t0+Δt)と当該右回避舵角パターンδRi(t0+Δt)に対応する操舵支援トルクTRiからなる点(δRi(t0+Δt)、TRi)を2次元平面上にプロットし、プロットした各点(δRi(t0+Δt)、TRi)の間を直線で結ぶことによって生成する。操舵支援トルクTRiは、TR1>TR2>…>TRNTHとなるように設定する。ここで、k番目の右回避舵角パターンδRk(t0+Δt)に対応する回避経路は道路境界内に収まるが、k+1番目の右回避舵角パターンδRk+1(t0+Δt)に対応する回避経路は道路境界内に収まらないとする。その場合、操舵支援トルクTRkを「0」とし、操舵支援トルクTRk+1、…、TRNTHを負の値とする。すなわち、操舵支援トルクTiは、TR1>TR2>…>TRk(=0)>…>TRNTHとなるように設定する。 Specifically, first, a first assist torque characteristic diagram is set based on the right avoidance steering angle pattern δ Ri (t 0 + Δt) calculated in step S804. As shown in FIG. 32, the first assist torque characteristic diagram shows, for example, steering corresponding to the right avoidance steering angle pattern δ Ri (t 0 + Δt) and the right avoidance steering angle pattern δ Ri (t 0 + Δt). A point (δ Ri (t 0 + Δt), T Ri ) consisting of the assist torque T Ri is plotted on a two-dimensional plane, and a straight line between the plotted points (δ Ri (t 0 + Δt), T Ri ). Generate by tying with. The steering assist torque T Ri is set so that T R1 > T R2 >...> T RNTH . Here, the avoidance route corresponding to the kth right avoidance steering angle pattern δ Rk (t 0 + Δt) falls within the road boundary, but the (k + 1) th right avoidance steering angle pattern δ Rk + 1 (t 0 + It is assumed that the avoidance route corresponding to Δt) does not fit within the road boundary. In this case, the steering assist torque T Rk is set to “0”, and the steering assist torques T Rk + 1 ,..., T RNTH are set to negative values. That is, the steering assist torque T i is, T R1> T R2> ... > T Rk (= 0)> ... set such that> T RNTH.
次に、前記ステップS805で算出した左回避舵角パターンδLi(t0+Δt)に基づいて第2の支援トルク特性図を設定する。第2の支援トルク特性図は、例えば、左回避舵角パターンδLi(t0+Δt)と当該左回避舵角パターンδLi(t0+Δt)に対応した操舵支援トルクTLiからなる点(δLi(t0+Δt)、TLi)を平面上にプロットし、プロットした各点(δLi(t0+Δt)、TLi)の間を直線で結ぶことによって生成する。操舵支援トルクTLiは、TL1<TL2<…<TLNTHとなるように設定する。ここで、k番目の左回避舵角パターンδLk(t0+Δt)に対応する回避経路は道路境界内に収まるが、k+1番目の左回避舵角パターンδLk+1(t0+Δt)に対応する回避経路は道路境界内に収まらないとする。その場合、操舵支援トルクTLkを「0」とし、操舵支援トルクTLk+1、…、TLNTHを正の値とする。すなわち、TL1<TL2<…<TLk(=0)<…<TLNTHとなるように設定する。 Next, a second assist torque characteristic diagram is set based on the left avoidance steering angle pattern δ Li (t 0 + Δt) calculated in step S805. The second assist torque characteristic diagram includes, for example, a left avoidance steering angle pattern δ Li (t 0 + Δt) and a steering assist torque T Li corresponding to the left avoidance steering angle pattern δ Li (t 0 + Δt). (Δ Li (t 0 + Δt), T Li ) is plotted on a plane, and the plotted points (δ Li (t 0 + Δt), T Li ) are connected by straight lines. Steering assist torque T Li is set so that T L1 <T L2 <... < T LNTH. Here, the avoidance route corresponding to the kth left avoidance steering angle pattern δ Lk (t 0 + Δt) is within the road boundary, but the (k + 1) th left avoidance steering angle pattern δ Lk + 1 (t 0 + It is assumed that the avoidance route corresponding to Δt) does not fit within the road boundary. In this case, the steering assist torque T Lk is set to “0”, and the steering assist torques T Lk + 1 ,..., T LNTH are set to positive values. That, T L1 <T L2 <... <T Lk (= 0) <... < set to be T LNTH.
次に、設定した第1および第2の支援トルク特性図をもとに、操舵角δfに対応する操舵支援トルクを算出する。そして、算出した操舵支援トルクの付与を指示する信号をステアリングアクチュエータ7に出力する。
この処理をサンプリング周期ごとに逐次行うことで、運転者の不確定性に対して逐次補正をかけることが可能となり、予測のずれに対する信頼性を向上することができる。
Then, based on the first and second support torque characteristic diagram set, it calculates the steering assist torque corresponding to the steering angle [delta] f. Then, a signal instructing application of the calculated steering assist torque is output to the
By sequentially performing this process for each sampling period, it is possible to sequentially correct the driver's uncertainty, and it is possible to improve the reliability with respect to a deviation in prediction.
次に、上記ステップS802で行う、上記自車両SWと障害物SMとが干渉する可能性の有無の判定方法を、図面を参照して説明する。
図33は、自車両SWと障害物SMとが干渉する可能性の有無を判定する処理を示すフローチャートである。
図33に示すように、まず、そのステップS901では、自車両SWの減速度aVXを維持することで、障害物SMの手前で自車両SWを停止できるか否かを判定する。
Next, a method for determining whether or not there is a possibility of interference between the host vehicle SW and the obstacle SM performed in step S802 will be described with reference to the drawings.
FIG. 33 is a flowchart showing a process for determining whether or not there is a possibility of interference between the host vehicle SW and the obstacle SM.
As shown in FIG. 33, first, in step S901, it is determined whether or not the host vehicle SW can be stopped before the obstacle SM by maintaining the deceleration a VX of the host vehicle SW.
具体的には、vVX 2が(-2×aVX×xB)未満であるか否かを判定する。そして、(-2×aVX×xB)未満であると判定した場合には、自車両SWの減速度aVXを維持することで、障害物SMの手前で自車両SWを停止できると判定し(YES)、処理を終了して復帰する。この復帰により、ステップS801に移行する。一方、(-2×aVX×xB)以上であると判定した場合には、自車両SWの減速度aVXを維持しても、自車両SWと障害物SMとが干渉する可能性があると判定し(NO)、ステップS902に移行する。 Specifically, it is determined whether v VX 2 is less than (−2 × a VX × x B ). If it is determined that it is less than ( −2 × a VX × x B ), it is determined that the host vehicle SW can be stopped before the obstacle SM by maintaining the deceleration a VX of the host vehicle SW. (YES), end the process and return. With this return, the process proceeds to step S801. On the other hand, if it is determined that it is ( −2 × a VX × x B ) or more, there is a possibility that the own vehicle SW and the obstacle SM may interfere even if the deceleration a VX of the own vehicle SW is maintained. It is determined that there is (NO), and the process proceeds to step S902.
次に、ステップS902では、自車両SWが障害物SMの位置に到達するまでの到達時間TCJ'を算出する。
具体的には、自車両SWの減速度aVX、自車両SWの縦方向速度vVXおよび障害物SMの縦方向位置xBに基づき、下記(20)式を満たす正の値tを算出する。そして、算出した値tを到達時間TCJ'とする。
0.5×aVX×t2+VVX×t=XB ………(20)
次に、ステップS903では、現在から到達時間TCJ'後までの間に、自車両SWの走行領域に障害物SMが侵入するか否かを判定する。
具体的には、まず、前記ステップS902で算出した到達時間TCJ'に基づいて、当該到達時間TCJ'後における障害物SMの横方向位置yB+vBY×TCJ'を算出する。
Next, in step S902, an arrival time T CJ ′ until the host vehicle SW reaches the position of the obstacle SM is calculated.
Specifically, a positive value t that satisfies the following equation (20) is calculated based on the deceleration a VX of the host vehicle SW, the longitudinal speed v VX of the host vehicle SW, and the longitudinal position x B of the obstacle SM. . The calculated value t is defined as an arrival time T CJ ′.
0.5 × a VX × t 2 + V VX × t = X B ……… (20)
Next, in step S903, it is determined whether or not the obstacle SM enters the traveling area of the host vehicle SW between the present time and the time after the arrival time T CJ '.
More specifically, first, the 'on the basis of, the arrival time T CJ' calculated arrival time T CJ in step S902 to calculate a lateral position y B + v BY × T CJ ' obstacle SM after.
次に、算出した横方向位置yB+vBY×TCJ'の絶対値|yB+vBY×TCJ'|が設定値YTH未満であるか否かを判定する。そして、横方向位置の絶対値|yB+vBY×TCJ'|が設定値YTH未満であると判定した場合には、自車両SWの走行領域に障害物SMが侵入すると判定し(YES)、処理を終了して復帰する。一方、横方向位置の絶対値|yB+vBY×TCJ'|が設定値YTH以上であると判定した場合には、自車両SWの走行領域に障害物が侵入しない(NO)、つまり、運転者による障害物回避操作を支援する必要がないと判定し、処理を終了して復帰する。この復帰により、ステップS801に移行する。 Then, the calculated lateral position y B + v 'absolute value of | y B + v BY × T CJ' | BY × T CJ determines whether less than the set value Y TH. When it is determined that the absolute value | y B + v BY × TCJ ′ | of the lateral position is less than the set value Y TH, it is determined that the obstacle SM enters the traveling area of the host vehicle SW ( YES), finish the process and return. On the other hand, when it is determined that the absolute value | y B + v BY × TCJ ′ | of the lateral position is equal to or greater than the set value Y TH , no obstacle enters the traveling area of the host vehicle SW (NO), That is, it is determined that it is not necessary to support the obstacle avoidance operation by the driver, and the process is terminated and the process returns. With this return, the process proceeds to step S801.
次に、上記ステップS804で行う、上記右回避舵角パターンδRiの算出方法を、図面を参照して説明する。
図34は、右回避舵角パターンδRiを算出する処理を示すフローチャートである。
図34に示すように、まず、そのステップS1001では、変数iが設定値NTHであるか否かを判定する。変数iは、後述するステップS1002〜S1007のフローの実行回数をカウントするための変数であり、この処理の開始時に1に設定する。そして、変数iが設定値NTHであると判定した場合には(YES)処理を終了して復帰する。一方、変数iが設定値NTHではないと判定した場合には(NO)ステップS1002に移行する。
Next, the calculation method of the right avoidance steering angle pattern δ Ri performed in step S804 will be described with reference to the drawings.
FIG. 34 is a flowchart showing a process for calculating the right avoidance steering angle pattern δ Ri .
As shown in FIG. 34, first, in the step S1001, the determining whether the variable i is set value N TH. The variable i is a variable for counting the number of executions of steps S1002 to S1007 described later, and is set to 1 at the start of this process. If it is determined that the variable i is the set value NTH (YES), the process is terminated and the process returns. On the other hand, if it is determined that the variable i is not the set value N TH (NO), the process proceeds to step S1002.
次に、ステップS1002では、障害物回避のための評価関数J(u)を設定する。
本実施形態では、車両モデル、評価関数J(u)を使用した最適化計算によって、障害物SMの存在確率が設定水準THiよりも低い領域内を通過する回避経路を生成する。
具体的には、まず、自車両SWの将来の走行経路を算出するために、自車両SWの運動を記述する二輪モデルとして、自車両SWの減速を考慮した二輪モデルを使用する。
In step S1002, an evaluation function J (u) for obstacle avoidance is set.
In the present embodiment, an avoidance route that passes through an area in which the presence probability of the obstacle SM is lower than the set level TH i is generated by optimization calculation using the vehicle model and the evaluation function J (u).
Specifically, first, in order to calculate the future travel route of the host vehicle SW, a two-wheel model that considers deceleration of the host vehicle SW is used as a two-wheel model that describes the motion of the host vehicle SW.
この二輪モデルは、走行速度が一定で、ヨー角θが十分に小さく、横方向速度vVYが縦方向速度vVXと比較して十分に小さく、タイヤ横力の飽和特性が顕著に現れない運動状態では、下記(21)式のように近似することができる。
dxV/dt=vcos(β+θ)
dyV/dt=vsin(β+θ) ………(21)
dθ/dt=γ
dv/dt=aVX
dβ/dt=-γ+[2Kf(αf、aVX)+2Yr(αr、aVX)]/MVV
dγ/dt=[2LfKf(αf、aVX)-2LrYr(αf、aVX)]/I
dδf/dt=-δf/Ts-δf/Ts
In this two-wheel model, the running speed is constant, the yaw angle θ is sufficiently small, the lateral speed v VY is sufficiently smaller than the longitudinal speed v VX, and the tire lateral force saturation characteristic does not appear remarkably. In the state, it can be approximated as the following equation (21).
dx V / dt = vcos (β + θ)
dy V / dt = vsin (β + θ) ……… (21)
dθ / dt = γ
dv / dt = a VX
dβ / dt = -γ + [2K f (α f , a VX ) + 2Y r (α r , a VX )] / MV V
dγ / dt = [2L f K f (α f , a VX ) -2L r Y r (α f , a VX )] / I
dδ f / dt = -δ f / T s -δ f / T s
ただし、Yf(αf、αVX)、Yr(αr、αVX)は、タイヤ特性をモデル化した関数を簡略化したものである。例えば、"Bakker,E.,Nyborg,L.and Pacejka,H.B.:Tyre Modeling for Use in Vehicle Dynamics Studies,SAE Tech. Pap.Ser.,No.870495 (1987)"に記載のものを利用可能である。Yf(αf、αVX)、Yr(αr、αVX)では、タイヤが発生する力は摩擦円拘束を有し、同じタイヤすべり角αf、αrでも、縦方向に力が発生していると横力が減少する。 However, Y f (α f , α VX ) and Y r (α r , α VX ) are simplified functions that model tire characteristics. For example, those described in "Bakker, E., Nyborg, L. and Pacejka, HB: Tire Modeling for Use in Vehicle Dynamics Studies, SAE Tech. Pap. Ser., No. 870495 (1987)" can be used. . In Y f (α f , α VX ) and Y r (α r , α VX ), the force generated by the tire has a frictional circle constraint, and even in the same tire slip angle α f , α r If it occurs, the lateral force decreases.
また、タイヤすべり角αf、αrが上記(3)式のものと同様とすると、上記(21)式は、下記(22)式のようにまとめることができる。
dxV /dt=fV(xV、uV) ………(22)
xV=(xV、yV、θ、v、β、γ、δf)
uV=(δf *)
そして、上記(22)式をもとに、現在時刻t0から推定時刻t0+Tfまでの間に、自車両SWに加えた操作量uに対する車両状態ベクトルxVの予測値に基づき、評価関数J(u)は、下記(23)式のように表記することができる。
Further, when the tire slip angles α f and α r are the same as those in the above formula (3), the above formula (21) can be summarized as the following formula (22).
dx V / dt = f V (x V , u V ) ……… (22)
x V = (x V , y V , θ, v, β, γ, δ f )
u V = (δ f * )
Based on the above equation (22), based on the predicted value of the vehicle state vector x V for the operation amount u applied to the host vehicle SW between the current time t 0 and the estimated time t 0 + T f , The evaluation function J (u) can be expressed as the following equation (23).

ここで、上記(23)式の右辺の第1項は、推定時刻t0+Tfにおける車両運動状態を評価するための終端評価式である。終端評価式は、第1の評価項目Ψ1(t0+Tf)を有する。第1の終端評価項目Ψ1(t0+Tf)は、推定時刻t0+Tf後に、自車両SWの車両姿勢が道路の進行方向に向くようにするための項目である。 Here, the first term on the right side of the equation (23) is a terminal evaluation equation for evaluating the vehicle motion state at the estimated time t 0 + T f . The terminal evaluation formula has a first evaluation item Ψ 1 (t 0 + T f ). The first terminal evaluation item ψ 1 (t 0 + T f ) is an item for causing the vehicle posture of the host vehicle SW to face the road traveling direction after the estimated time t 0 + T f .
また、右辺の第2項は、現在時刻t0から推定時刻t0+Tfまでの間における車両運動状態を評価する区間評価式である。区間評価式は、第1〜第3の区間評価項目を有する。第1の区間評価項目L2(τ)は、現在時刻t0から推定時刻t0+Tfまでの間、自車両SWが障害物SMに近づかないようにするための項目である。第2の区間評価項目L3(τ)は、現在時刻t0から推定時刻t0+Tfまでの間、自車両SWが道路境界内から逸脱しないようにするための項目である。第3の区間評価項目L4(τ)は、現在時刻t0から推定時刻t0+Tfまでの間、自車両SWの操作量uvを小さくするための評価式である。 The second term on the right side is a section evaluation formula for evaluating the vehicle motion state between the current time t 0 and the estimated time t 0 + T f . The section evaluation formula has first to third section evaluation items. The first section evaluation item L 2 (τ) is an item for preventing the host vehicle SW from approaching the obstacle SM from the current time t 0 to the estimated time t 0 + T f . The second section evaluation item L 3 (τ) is an item for preventing the host vehicle SW from deviating from the road boundary from the current time t 0 to the estimated time t 0 + T f . A third section evaluation items L 4 (tau) is the period from the current time t0 to time estimate t 0 + T f, is the evaluation formula for reducing the operation amount u v of the vehicle SW.
さらに、w1、w2、w3、w4は重みパラメータである。
次に、ステップS1003では、前記ステップS1002で設定した評価関数J(u)に基づいて、当該評価関数J(u)を最小にする最適化計算を行う。
評価関数J(u)を最小にする操作量を求める問題は、一般に最適制御問題と呼び、その数値解を求めるために様々なアルゴリズムが公知の技術として考えられている。
公知の技術の一例としては、例えば、T.Ohtsuka,"A continuation /GMRES method for fastcomputation of nonlinear receeding horizon control",Automatica, vol,40, 563/574, 2004.が挙げられる。
また、右回避舵角パターンδRiを得るためには、最適化計算の初期解として、前輪5FL、5FRを右方向に転舵する舵角パターンを読み込む必要がある。この初期解は、予め速度および障害物SMとの間の距離Rs等の条件に応じたものをメモリに格納しておく。
Further, w 1 , w 2 , w 3 , and w 4 are weight parameters.
Next, in step S1003, based on the evaluation function J (u) set in step S1002, optimization calculation for minimizing the evaluation function J (u) is performed.
The problem of obtaining an operation amount that minimizes the evaluation function J (u) is generally called an optimal control problem, and various algorithms are considered as known techniques for obtaining a numerical solution thereof.
An example of a known technique is T. Ohtsuka, “A continuation / GMRES method for fast computing of nonlinear receeding horizon control”, Automatica, vol, 40, 563/574, 2004.
Further, in order to obtain the right avoidance steering angle pattern δ Ri , it is necessary to read the steering angle pattern for turning the front wheels 5FL and 5FR in the right direction as an initial solution for the optimization calculation. This initial solution is stored in advance in the memory according to conditions such as the speed and the distance R s between the obstacle SM and the like.
本実施形態の場合、操作量uvは操舵角δfであるので、最適化計算によって得られる数値解は、現在時刻t0から時刻t0+Tfまでの間の操舵量の時系列となる。
なお、実際の計算では、評価区間t0〜t0+Tfを適当なステップ数Nで分割して離散化を行い、各ステップ時点における操作量の値を算出する。これにより、以下に示すような、N個の時系列操作量δf *を得ることができる。
δf *=(δf *(t0)、δf *(t0+Tf/N)、…、δf *(t0+(N-1)×Tf/N))
In the case of the present embodiment, the manipulated variable uv is the steering angle δ f , so the numerical solution obtained by the optimization calculation is a time series of the steering amount from the current time t 0 to the time t 0 + T f. .
In the actual calculation, performed discretized by dividing the evaluation interval t 0 ~t 0 + T f at an appropriate number of steps N, calculates the values of the manipulated variables at each step time. As a result, N time-series manipulated variables δ f * as shown below can be obtained.
δ f * = (δ f * (t 0 ), δ f * (t 0 + T f / N), ..., δ f * (t 0 + (N-1) × T f / N))
ここで、ステップ数Nは大きいほどサンプル時間間隔が短縮し、精度の高い予測操作量δf *を算出できる。しかし、ステップ数Nが大きくなると、算出するデータの数が大幅に増加するため、回避支援コントローラ4の計算負荷が高くなる。そのため、ステップ数Nは、予測操作量δf *の精度と回避支援コントローラ4の計算付加とが適切となるように設定する。例えば、サンプル時間間隔が10〜100msec.となるように決定する。
Here, the larger the number of steps N, the shorter the sampling time interval, and the more accurate predicted manipulated variable δ f * can be calculated. However, as the number of steps N increases, the number of data to be calculated increases significantly, and the calculation load on the
次に、ステップS1004では、前記ステップS1003で設定した予測操作量(以下、「舵角パターンδf *」とも呼ぶ)によって自車両SWを操舵した場合に、自車両SWが走行する将来の走行経路(xV *(t)、yV *(t))を算出する。そして、算出した将来の走行経路(xV *(t)、yV *(t))を回避経路(xV *(t)、yV *(t))とする。
具体的には、舵角パターンδf *に基づき、上記(21)式および(22)式のように定義した二輪モデルに従って、自車両SWの将来の走行経路(xV *(t)、yV *(t))を算出する。これにより、以下に示すような、N個の時系列データを得ることができる。
xV *=(xV * (t0)、xV * (t0+Tf/N)、…、xV * (t0+Tf))
yV *=(yV * (t0)、yV * (t0+Tf/N)、…、yV * (t0+Tf))
Next, in step S1004, when the host vehicle SW is steered with the predicted operation amount set in step S1003 (hereinafter also referred to as “steering angle pattern δ f * ”), a future travel route on which the host vehicle SW travels. (x V * (t), y V * (t)) is calculated. Then, the calculated future travel path (x V * (t), y V * (t)) of the avoidance path (x V * (t), y V * (t)) and.
Specifically, based on the steering angle pattern δ f * , according to the two-wheel model defined as the above formulas (21) and (22), the future travel route (x V * (t), y V * (t)) is calculated. As a result, N pieces of time-series data as shown below can be obtained.
x V * = (x V * (t 0 ), x V * (t 0 + T f / N), ..., x V * (t 0 + T f ))
y V * = (y V * (t 0 ), y V * (t 0 + T f / N), ..., y V * (t 0 + T f ))
次に、ステップS1005では、前記ステップS1003で設定した舵角パターンδf * (t)で操舵した場合に、自車両SWが道路境界内から逸脱するか否かを判定する。
具体的には、まず、前記ステップS1004で算出した自車両SWの将来の走行経路(xV *(t)、yV *(t))上から、Y成分yV * (k)の最小値yminを抽出する。なお、逸脱の可能性があるのは道路の右端の道路境界であるので、最小値yminを抽出は、現在から2×(TCJ+ΔTX)後までのY成分yV * (k)を対象として行う。
Next, in step S1005, it is determined whether or not the host vehicle SW deviates from the road boundary when steering is performed with the steering angle pattern δ f * (t) set in step S1003.
Specifically, first, the minimum value of the Y component y V * (k) from the future travel route (x V * (t), y V * (t)) of the host vehicle SW calculated in step S1004. Extract y min . Since it is the road boundary at the right end of the road that may deviate, the minimum value y min is extracted from the current Y component y V * (k) 2 × (T CJ + ΔT X ) To target.
次に、抽出した最小値yminが設定値YRより小さいか否かを判定する。そして、設定値YRよりも小さいと判定した場合には、舵角パターンδf * (k)で操舵しても、回避経路が道路境界内に収まっていると判定し(YES)、処理を終了して復帰する。一方、設定値YR以上であると判定した場合には、回避経路が道路境界内に収まっておらず、道路境界内から逸脱していると判定し(NO)、ステップS1006に移行する。 Next, it is determined whether or not the extracted minimum value y min is smaller than the set value Y R. When it is determined to be smaller than the set value Y R can be steered by the steering angle pattern δ f * (k), the avoidance route is determined to fall within the road boundary (YES), processing Exit and return. On the other hand, if it is determined that it is equal to or greater than the set value Y R, it is determined that the avoidance route is not within the road boundary and deviates from the road boundary (NO), and the process proceeds to step S1006.
次に、ステップS1006では、前記ステップS1003で設定した舵角パターンδf * (t)で操舵した場合に、自車両SWが障害物SMの存在確率が設定水準THiよりも低い領域のみを走行することが可能か否かを判別する。
具体的には、前記ステップS803で設定した障害物SMの存在確率分布を参照し、前記ステップS1004で算出した回避経路(xV *(t)、yV *(t))上の各地点に対して、障害物SMの存在確率を算出する。そして、算出した存在確率から、最大のものを最大値Pm(=maxf(xV *(t)、yV *(t),t))として抽出する。
Next, in step S1006, when the vehicle is steered with the steering angle pattern δ f * (t) set in step S1003, the host vehicle SW travels only in a region where the presence probability of the obstacle SM is lower than the set level TH i. It is determined whether or not it is possible.
Specifically, with reference to the existence probability distribution of the obstacle SM set in step S803, each point on the avoidance route (x V * (t), y V * (t)) calculated in step S1004 is determined. On the other hand, the existence probability of the obstacle SM is calculated. Then, the maximum one is extracted as the maximum value P m (= maxf (x V * (t), y V * (t), t)) from the calculated existence probability.
次に、抽出した障害物SMの存在確率の最大値Pmが設定水準THiより小さいか否かを判定する。そして、設定水準THiよりも小さいと判定した場合には、障害物SMの存在確率が設定水準THiよりも低い領域のみを走行することが可能な回避経路を生成したと判定し(YES)、ステップS1008に移行する。一方、設定水準THi以上であると判定した場合には、障害物SMの存在確率が設定水準THiよりも高い領域を通過する回避経路であると判定し(NO)、ステップS1007に移行する。 Next, it is determined whether or not the maximum value P m of the presence probability of the extracted obstacle SM is smaller than the set level TH i . If it is determined that the vehicle is smaller than the set level TH i , it is determined that an avoidance route that can travel only in an area where the presence probability of the obstacle SM is lower than the set level TH i is generated (YES). The process proceeds to step S1008. On the other hand, if it is determined that it is equal to or higher than the set level TH i, it is determined that the path is an avoidance path that passes through an area where the presence probability of the obstacle SM is higher than the set level TH i (NO), and the process proceeds to step S1007. .
次に、ステップS1007では、重みw4をより低い値に再設定する。
一方、ステップS1008では、前記ステップS1003で設定した舵角パターンδf *を、右回避舵角パターンδRiとしてメモリに格納する。また、変数iに「1」を加算した値を、新しい変数iとする。その後、前記ステップS1001に移行する。
なお、ステップS805で行う、上記左回避舵角パターンδLiの算出方法も、上記右回避舵角パターンδRiの算出方法と同様である。
Next, in step S1007, the weight w 4 is reset to a lower value.
On the other hand, in step S1008, the steering angle pattern δ f * set in step S1003 is stored in the memory as the right avoidance steering angle pattern δ Ri . A value obtained by adding “1” to the variable i is set as a new variable i. Thereafter, the process proceeds to step S1001.
The calculation method of the left avoidance steering angle pattern δ Li performed in step S805 is the same as the calculation method of the right avoidance steering angle pattern δ Ri .
ただし、左回避舵角パターンδLiを得るためには、最適化計算の初期解として、前輪5FL、5FRを左方向に転舵する舵角パターンを読み込む必要がある。また、設定した舵角パターンδf *は、左回避舵角パターンδLiとしてメモリに格納する。
ここで、本実施形態では、図29の車速センサ2、ジャイロセンサ9および加速度センサ10が自車両状態検出手段を構成する。以下同様に、図29の操舵角センサ3が操作状態検出手段を構成する。また、カメラ1が障害物検出手段を構成する。さらに、図29の回避支援コントローラ4が存在確率分布推定手段および回避経路生成手段を構成する。また、操舵支援トルクが支援制御量を構成する。
However, in order to obtain the left avoiding steering angle pattern δ Li , it is necessary to read the steering angle pattern for steering the front wheels 5FL and 5FR to the left as the initial solution for the optimization calculation. The set steering angle pattern δ f * is stored in the memory as the left avoidance steering angle pattern δ Li .
Here, in this embodiment, the
(本実施形態の効果)
(1)本実施形態では、回避経路として、回避経路を数値的に評価する評価関数を最大または最小とする経路を生成する。
そのため、評価関数を最大または最小とする回避経路を算出することができる。それゆえ、例えば、評価関数として、関数値が大きくまたは小さくなると、回避時の評価項目の評価が高くなる関数を設定することで、評価項目の評価が高い回避経路、つまり、より適切な経路を算出することができる。その結果、算出した回避経路に沿って自車両が走行するように回避操作を支援することで、より適切な支援を行うことができる。
(Effect of this embodiment)
(1) In this embodiment, a route that maximizes or minimizes an evaluation function that numerically evaluates the avoidance route is generated as the avoidance route.
Therefore, an avoidance path that maximizes or minimizes the evaluation function can be calculated. Therefore, for example, by setting a function that increases the evaluation of the evaluation item at the time of avoidance when the function value is large or small as an evaluation function, an avoidance route with a high evaluation item evaluation, that is, a more appropriate route is set. Can be calculated. As a result, more appropriate support can be performed by assisting the avoidance operation so that the host vehicle travels along the calculated avoidance route.
(2)また、回避支援手段が、障害物回避操作を支援する支援制御量を逐次演算する。
そのため、最新の自車両の運動状態、自車両の操作状態、および障害物の存在確率分布に応じた支援制御量を算出することができる。それゆえ、例えば、障害物の動きの予測が外れ、自車両の将来の走行経路上における障害物の存在確率分布が変動した場合、新しい自車両の運動状態に応じて支援制御量を算出することで、支援制御量を適宜修正することができる。その結果、より適切な支援を行うことができる。
(2) Further, the avoidance support means sequentially calculates a support control amount for supporting the obstacle avoidance operation.
Therefore, it is possible to calculate the assistance control amount according to the latest motion state of the host vehicle, the operation state of the host vehicle, and the obstacle probability distribution. Therefore, for example, when the obstacle movement is not predicted and the obstacle probability distribution on the future driving route of the host vehicle changes, the assist control amount is calculated according to the new vehicle motion state. Thus, the support control amount can be appropriately corrected. As a result, more appropriate support can be provided.
(3)さらに、回避経路生成手段が、自車両のタイヤの摩擦円を考慮した車両モデルを用いて回避経路を生成する。
そのため、例えば、運転者が操舵とともに、制動操作も行っている場合には、制動操作により、自車両が発生する横力が減少することを考慮して回避経路を生成できる。その結果、より適切な回避経路を生成することができる。
(3) Furthermore, the avoidance route generation means generates an avoidance route using a vehicle model that takes into account the friction circle of the tire of the host vehicle.
Therefore, for example, when the driver is performing a braking operation as well as steering, an avoidance route can be generated in consideration of a decrease in the lateral force generated by the host vehicle due to the braking operation. As a result, a more appropriate avoidance route can be generated.
1はカメラ(障害物検出手段、道路境界検出手段)、2は車速センサ(自車両状態検出手段)、3は操舵角センサ(操作状態検出手段)、4は回避支援コントローラ(存在確率分布推定手段、回避経路生成手段)、7はステアリングアクチュエータ(ステアリングアクチュエータ)、8はステアリングコラム、9はジャイロセンサ(自車両状態検出手段)、10は加速度センサ(自車両状態検出手段)、SWは自車両、SMは障害物、操舵支援トルクは支援制御量
Claims (13)
前記自車両の操作状態を検出する操作状態検出手段と、
前記自車両の周囲の障害物の位置を検出する障害物検出手段と、
前記障害物検出手段が検出した前記障害物の位置、および前記障害物検出手段の検出特性により当該位置に含まれる検出誤差の性質に基づいて、前記障害物の存在確率分布を推定する存在確率分布推定手段と、
前記自車両状態検出手段が検出した前記自車両の運動状態、前記操作状態検出手段が検出した前記自車両の操作状態、および前記存在確率分布推定手段が推定した前記障害物の存在確率分布に基づいて、運転者による障害物回避操作を支援する回避支援手段と、を備え、
前記存在確率分布推定手段は、前記自車両の横方向への運動およびヨー方向への運動の少なくとも一方の運動に基づき当該運動が大きい場合、当該運動が小さい場合と比較して、前記自車両の横方向における前記障害物の存在確率分布の最高値および当該最高値の周辺の存在確率を低減することを特徴とする車両用運転支援装置。 Own vehicle state detection means for detecting the movement state of the own vehicle;
Operation state detection means for detecting the operation state of the host vehicle;
Obstacle detection means for detecting the position of obstacles around the host vehicle;
Presence probability distribution for estimating the presence probability distribution of the obstacle based on the position of the obstacle detected by the obstacle detection means and the nature of the detection error included in the position by the detection characteristics of the obstacle detection means An estimation means;
Based on the movement state of the own vehicle detected by the own vehicle state detection means, the operation state of the own vehicle detected by the operation state detection means, and the existence probability distribution of the obstacle estimated by the existence probability distribution estimation means. And an avoidance support means for supporting an obstacle avoidance operation by the driver ,
The existence probability distribution estimation means is configured to determine whether the own vehicle has a large movement based on at least one of the movement in the lateral direction and the movement in the yaw direction of the own vehicle as compared with the case where the movement is small. highest and vehicular driving support apparatus which is characterized that you reduce the presence probability of near the maximum value of the existence probability distribution of the obstacle in the lateral direction.
前記自車両の操作状態を検出する操作状態検出手段と、
前記自車両の周囲の障害物の位置を検出する障害物検出手段と、
前記障害物検出手段が検出した前記障害物の位置、および前記障害物検出手段の検出特性により当該位置に含まれる検出誤差の性質に基づいて、前記障害物の存在確率分布を推定する存在確率分布推定手段と、
前記自車両状態検出手段が検出した前記自車両の運動状態、前記操作状態検出手段が検出した前記自車両の操作状態、および前記存在確率分布推定手段が推定した前記障害物の存在確率分布に基づいて、運転者による障害物回避操作を支援する回避支援手段と、を備え、
前記存在確率分布推定手段は、前記自車両の縦方向への運動およびピッチ方向への運動の少なくとも一方の運動に基づき当該運動が大きい場合、当該運動が小さい場合と比較して、前記自車両の縦方向における前記障害物の存在確率分布の最高値および当該最高値の周辺の存在確率を低減することを特徴とする車両用運転支援装置。 Own vehicle state detection means for detecting the movement state of the own vehicle;
Operation state detection means for detecting the operation state of the host vehicle;
Obstacle detection means for detecting the position of obstacles around the host vehicle;
Presence probability distribution for estimating the presence probability distribution of the obstacle based on the position of the obstacle detected by the obstacle detection means and the nature of the detection error included in the position by the detection characteristics of the obstacle detection means An estimation means;
Based on the movement state of the own vehicle detected by the own vehicle state detection means, the operation state of the own vehicle detected by the operation state detection means, and the existence probability distribution of the obstacle estimated by the existence probability distribution estimation means. And an avoidance support means for supporting an obstacle avoidance operation by the driver,
The existence probability distribution estimation means is configured to determine whether the own vehicle has a larger movement based on at least one of the movement in the vertical direction and the movement in the pitch direction of the own vehicle compared to the case in which the movement is small. existence probability distribution of the maximum values and the maximum value car dual driving support system you characterized by reducing the existence probability of the periphery of the obstacle in the vertical direction.
前記自車両の操作状態を検出する操作状態検出手段と、
前記自車両の周囲の障害物の位置を検出する障害物検出手段と、
前記障害物検出手段が検出した前記障害物の位置、および前記障害物検出手段の検出特性により当該位置に含まれる検出誤差の性質に基づいて、前記障害物の存在確率分布を推定する存在確率分布推定手段と、
前記自車両状態検出手段が検出した前記自車両の運動状態、前記操作状態検出手段が検出した前記自車両の操作状態、および前記存在確率分布推定手段が推定した前記障害物の存在確率分布に基づいて、運転者による障害物回避操作を支援する回避支援手段と、を備え、
前記回避支援手段は、前記存在確率分布推定手段が推定した前記障害物の存在確率分布に基づき、前記自車両の将来の走行経路上における前記障害物の存在確率が高い場合、当該存在確率が低い場合と比較して、前記障害物回避操作を支援する支援制御量を増大することを特徴とする車両用運転支援装置。 Own vehicle state detection means for detecting the movement state of the own vehicle;
Operation state detection means for detecting the operation state of the host vehicle;
Obstacle detection means for detecting the position of obstacles around the host vehicle;
Presence probability distribution for estimating the presence probability distribution of the obstacle based on the position of the obstacle detected by the obstacle detection means and the nature of the detection error included in the position by the detection characteristics of the obstacle detection means An estimation means;
Based on the movement state of the own vehicle detected by the own vehicle state detection means, the operation state of the own vehicle detected by the operation state detection means, and the existence probability distribution of the obstacle estimated by the existence probability distribution estimation means. And an avoidance support means for supporting an obstacle avoidance operation by the driver,
The avoidance support means has a low existence probability when the existence probability of the obstacle on the future travel route of the host vehicle is high based on the existence probability distribution of the obstacle estimated by the existence probability distribution estimation means. If compared to the obstacle avoidance car dual driving support system you characterized by increasing the assist control amount to support the operation.
前記自車両の操作状態を検出する操作状態検出手段と、
前記自車両の周囲の障害物の位置を検出する障害物検出手段と、
前記障害物検出手段が検出した前記障害物の位置、および前記障害物検出手段の検出特性により当該位置に含まれる検出誤差の性質に基づいて、前記障害物の存在確率分布を推定する存在確率分布推定手段と、
前記自車両状態検出手段が検出した前記自車両の運動状態、前記操作状態検出手段が検出した前記自車両の操作状態、および前記存在確率分布推定手段が推定した前記障害物の存在確率分布に基づいて、運転者による障害物回避操作を支援する回避支援手段と、
前記存在確率分布推定手段が推定した前記障害物の存在確率分布に基づき、前記障害物の存在確率が設定値よりも低い領域内を通過する回避経路を生成する回避経路生成手段と、を備え、
前記回避支援手段は、前記自車両に前記回避経路を走行させる舵角パターン、および前記自車両の操作状態に基づいて、前記障害物回避操作を支援する支援制御量を設定することを特徴とする車両用運転支援装置。 Own vehicle state detection means for detecting the movement state of the own vehicle;
Operation state detection means for detecting the operation state of the host vehicle;
Obstacle detection means for detecting the position of obstacles around the host vehicle;
Presence probability distribution for estimating the presence probability distribution of the obstacle based on the position of the obstacle detected by the obstacle detection means and the nature of the detection error included in the position by the detection characteristics of the obstacle detection means An estimation means;
Based on the movement state of the own vehicle detected by the own vehicle state detection means, the operation state of the own vehicle detected by the operation state detection means, and the existence probability distribution of the obstacle estimated by the existence probability distribution estimation means. Avoidance support means for supporting the obstacle avoidance operation by the driver,
Based on the presence probability distribution of the obstacle which the existence probability distribution estimation means has estimated, and a bypass route generating means for generating an avoidance path existence probability passes through lower region than the set value of the obstacle,
The avoidance support means sets a support control amount for supporting the obstacle avoidance operation based on a steering angle pattern for causing the host vehicle to travel the avoidance route and an operation state of the host vehicle. that car amphibious operation support device.
前記回避経路生成手段は、前記回避経路として、前記道路境界内に収まっている経路を生成することを特徴とする請求項5に記載の車両用運転支援装置。 Road boundary detecting means for detecting a road boundary around the host vehicle,
The vehicle driving support apparatus according to claim 5 , wherein the avoidance route generation unit generates a route that falls within the road boundary as the avoidance route.
前記自車両の横方向への運動およびヨー方向への運動の少なくとも一方の運動に基づき当該運動が大きい場合、当該運動が小さい場合と比較して、前記自車両の横方向における前記障害物の存在確率分布の最高値および当該最高値の周辺の存在確率を低減することを特徴とする車両用運転支援方法。 The position of the obstacle around the host vehicle is detected by the obstacle detection means, and based on the detected position and the nature of the detection error included in the position based on the characteristic of the obstacle detection means, the A vehicle for estimating obstacle existence probability distribution and supporting an obstacle avoidance operation by a driver based on the estimated obstacle existence probability distribution, the motion state of the host vehicle, and the operation state of the host vehicle. A driving support method,
The presence of the obstacle in the lateral direction of the host vehicle when the motion is large based on at least one of the lateral motion and the yaw motion of the host vehicle as compared to when the motion is small. A driving support method for a vehicle, characterized by reducing the highest value of the probability distribution and the existence probability around the highest value .
前記自車両の縦方向への運動およびピッチ方向への運動の少なくとも一方の運動に基づき当該運動が大きい場合、当該運動が小さい場合と比較して、前記自車両の縦方向における前記障害物の存在確率分布の最高値および当該最高値の周辺の存在確率を低減することを特徴とする車両用運転支援方法。The presence of the obstacle in the longitudinal direction of the host vehicle when the motion is large based on at least one of the motion in the vertical direction and the motion in the pitch direction of the host vehicle as compared to the case where the motion is small. A driving support method for a vehicle, characterized by reducing the highest value of the probability distribution and the existence probability around the highest value.
前記障害物の存在確率分布に基づき、前記自車両の将来の走行経路上における前記障害物の存在確率が高い場合、当該存在確率が低い場合と比較して、前記障害物回避操作を支援する支援制御量を増大することを特徴とする車両用運転支援方法。Assistance for assisting the obstacle avoidance operation based on the obstacle existence probability distribution when the obstacle existence probability on the future travel route of the host vehicle is high compared to the case where the existence probability is low A vehicle driving support method characterized by increasing a control amount.
前記障害物の存在確率分布に基づき、前記障害物の存在確率が設定値よりも低い領域内を通過する回避経路を生成し、生成した前記回避経路を前記自車両に走行させる舵角パターン、および前記自車両の操作状態に基づいて、前記障害物回避操作を支援する支援制御量を設定することを特徴とする車両用運転支援方法。Based on the obstacle existence probability distribution, a steering angle pattern for generating an avoidance route that passes through an area where the obstacle existence probability is lower than a set value, and causing the host vehicle to travel the generated avoidance route, and A driving support method for a vehicle, wherein an assistance control amount for supporting the obstacle avoiding operation is set based on an operation state of the host vehicle.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009019259A JP5282590B2 (en) | 2009-01-30 | 2009-01-30 | Vehicle driving support device and vehicle driving support method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009019259A JP5282590B2 (en) | 2009-01-30 | 2009-01-30 | Vehicle driving support device and vehicle driving support method |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010173511A JP2010173511A (en) | 2010-08-12 |
| JP5282590B2 true JP5282590B2 (en) | 2013-09-04 |
Family
ID=42704889
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009019259A Expired - Fee Related JP5282590B2 (en) | 2009-01-30 | 2009-01-30 | Vehicle driving support device and vehicle driving support method |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5282590B2 (en) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5560811B2 (en) * | 2010-03-23 | 2014-07-30 | トヨタ自動車株式会社 | Steering support device |
| JPWO2012039004A1 (en) * | 2010-09-22 | 2014-02-03 | 三菱電機株式会社 | Driving assistance device |
| CN103477378B (en) * | 2011-04-26 | 2016-10-12 | 丰田自动车株式会社 | Drive assistance device |
| EP2830031A4 (en) * | 2012-03-19 | 2016-08-10 | Toyota Motor Co Ltd | DEVICE FOR ASSISTING THE AVOIDANCE OF COLLISIONS |
| US11300968B2 (en) | 2018-05-16 | 2022-04-12 | Massachusetts Institute Of Technology | Navigating congested environments with risk level sets |
| WO2024180652A1 (en) * | 2023-02-28 | 2024-09-06 | 日立Astemo株式会社 | Object detection device and object detection method |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3778166B2 (en) * | 2002-12-19 | 2006-05-24 | 株式会社デンソー | Inter-vehicle distance control device |
| JP4961880B2 (en) * | 2006-07-31 | 2012-06-27 | 日産自動車株式会社 | Vehicle route calculation apparatus and vehicle route calculation method |
| JP4980076B2 (en) * | 2007-01-11 | 2012-07-18 | 富士重工業株式会社 | Vehicle driving support device |
| JP2008191781A (en) * | 2007-02-01 | 2008-08-21 | Hitachi Ltd | Collision avoidance system |
| JP4970156B2 (en) * | 2007-06-12 | 2012-07-04 | 富士重工業株式会社 | Vehicle driving support device |
| JP5249525B2 (en) * | 2007-05-28 | 2013-07-31 | 本田技研工業株式会社 | Vehicle operation support device |
-
2009
- 2009-01-30 JP JP2009019259A patent/JP5282590B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010173511A (en) | 2010-08-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5130638B2 (en) | Avoidance operation calculation device, avoidance control device, vehicle including each device, avoidance operation calculation method, and avoidance control method | |
| US10814876B2 (en) | Vehicle lane-changing control method, vehicle lane-changing control device and related equipment | |
| US9229453B1 (en) | Unified motion planner for autonomous driving vehicle in avoiding the moving obstacle | |
| US9227632B1 (en) | Method of path planning for evasive steering maneuver | |
| CN102975716B (en) | The system and method that override detects is turned to for the speed adaptive during automatization's track centering | |
| JP6237256B2 (en) | Vehicle speed control device | |
| EP3663153A1 (en) | Vehicle control device | |
| JP5098584B2 (en) | Vehicle driving support device | |
| KR101850669B1 (en) | Target travel information generation device and drive control device | |
| JP5073528B2 (en) | Vehicle fixed-point stop control method and apparatus | |
| EP3663152A1 (en) | Vehicle control device | |
| CN108349532A (en) | System for the transfer for controlling motor vehicles in the case where that will collide with barrier | |
| WO2009155228A1 (en) | Path generation algorithm for automated lane centering and lane changing control system | |
| JP5023869B2 (en) | VEHICLE DRIVE OPERATION SUPPORT DEVICE AND VEHICLE DRIVE OPERATION SUPPORT METHOD | |
| CN114302839B (en) | Method for determining a path for avoiding a motor vehicle | |
| JP5282590B2 (en) | Vehicle driving support device and vehicle driving support method | |
| EP3511922B1 (en) | Vehicle travel control method and travel control device | |
| JP4899626B2 (en) | Travel control device | |
| CN111169477A (en) | Lane changing system and lane changing method | |
| JP2020032949A (en) | Automatic operation system | |
| JP2004189177A (en) | Driving operation assisting device for vehicle and vehicle equipped with it | |
| JP4999762B2 (en) | Vehicle contact avoidance support device | |
| JP2007204043A (en) | Driving operation auxiliary device for vehicle and vehicle provided therewith | |
| CN116917180A (en) | Method for activating obstacle avoidance system of motor vehicle | |
| JP6288305B2 (en) | Target vehicle speed generation device and travel control device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20100917 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20111128 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130131 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130205 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130403 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130430 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130513 |
|
| LAPS | Cancellation because of no payment of annual fees |