JP5211263B2 - 符号化ユニットの映像符号化時に局所的多重仮説予測を行う方法および装置 - Google Patents
符号化ユニットの映像符号化時に局所的多重仮説予測を行う方法および装置 Download PDFInfo
- Publication number
- JP5211263B2 JP5211263B2 JP2012510110A JP2012510110A JP5211263B2 JP 5211263 B2 JP5211263 B2 JP 5211263B2 JP 2012510110 A JP2012510110 A JP 2012510110A JP 2012510110 A JP2012510110 A JP 2012510110A JP 5211263 B2 JP5211263 B2 JP 5211263B2
- Authority
- JP
- Japan
- Prior art keywords
- sub
- unit
- encoding
- motion
- encoding unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 100
- 239000013598 vector Substances 0.000 claims description 237
- 238000012545 processing Methods 0.000 claims description 128
- 230000002123 temporal effect Effects 0.000 claims description 20
- 238000004364 calculation method Methods 0.000 claims description 7
- 238000001914 filtration Methods 0.000 claims description 5
- 238000005457 optimization Methods 0.000 claims description 4
- 238000012854 evaluation process Methods 0.000 claims description 2
- 238000012986 modification Methods 0.000 description 41
- 230000004048 modification Effects 0.000 description 41
- 238000010586 diagram Methods 0.000 description 20
- 238000013139 quantization Methods 0.000 description 10
- 238000007781 pre-processing Methods 0.000 description 8
- 238000011156 evaluation Methods 0.000 description 5
- 238000005192 partition Methods 0.000 description 5
- 238000012549 training Methods 0.000 description 4
- 230000006835 compression Effects 0.000 description 2
- 238000007906 compression Methods 0.000 description 2
- 230000014509 gene expression Effects 0.000 description 2
- 102100033868 Cannabinoid receptor 1 Human genes 0.000 description 1
- 101710187010 Cannabinoid receptor 1 Proteins 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 230000006837 decompression Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000010187 selection method Methods 0.000 description 1
- 238000000638 solvent extraction Methods 0.000 description 1
- 238000004148 unit process Methods 0.000 description 1
Images






Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/17—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object
- H04N19/176—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object the region being a block, e.g. a macroblock
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/56—Motion estimation with initialisation of the vector search, e.g. estimating a good candidate to initiate a search
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/136—Incoming video signal characteristics or properties
- H04N19/137—Motion inside a coding unit, e.g. average field, frame or block difference
- H04N19/139—Analysis of motion vectors, e.g. their magnitude, direction, variance or reliability
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/513—Processing of motion vectors
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/513—Processing of motion vectors
- H04N19/517—Processing of motion vectors by encoding
- H04N19/52—Processing of motion vectors by encoding by predictive encoding
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/577—Motion compensation with bidirectional frame interpolation, i.e. using B-pictures
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Compression Or Coding Systems Of Tv Signals (AREA)
- Compression, Expansion, Code Conversion, And Decoders (AREA)
Description
本出願は、US仮出願No.61/323,948(2010年4月14日出願、発明の名称:映像符号化における多重仮説予測)に基づく優先権を主張するものであり、当該出願に記載された内容を含むものである。また、本出願は、US出願No.13/080668(2011年4月6日出願、発明の名称:符号化ユニットの映像符号化時に局所的多重仮説予測を行う方法および装置)に基づく優先権を主張するものであり、当該出願に記載された内容を含むものである。
本発明は、映像の動き補償に関するものである。より具体的には、符号化ユニットの映像符号化時に局所的多重仮説予測(localized multihypothesis prediction)を行う方法および装置に関する。
動き補償は、映像の圧縮,解凍のための映像データの符号化,復号化において用いられる技術である。動き補償のために、現在の画像が1または複数の参照画像に部分的に置き換えて表される。参照画像は、現在より時間的に前である場合もあれば現在より時間的に後である場合もある。典型的には、動き補償が用いられる場合、画像は予め送信または保存された画像と精密に合成されて圧縮効率が改善される。符号化技術の進歩に伴い、新たな基準に関する設計が導入された。しかしながら、新たな基準においては、必ずしも従来の動き補償スキームが適切に機能しない。例えば、符号化効率が低下する場合がある。このため、映像符号化の符号化効率を向上させるための新たな方法が求められている。
本発明は、上記の問題点を解決するためになされたものであり、その目的は、符号化ユニットの映像符号化時に局所的多重仮説予測を行う方法および装置を提供することにある。
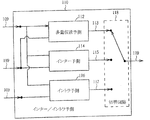
図1Aは、本発明の一実施例にかかる、符号化ユニットの映像符号化時に局所的多重仮説予測を行う装置を示す図である。
以下に示す説明および請求項の全体にわたって、特定の部材に同じ用語を用いる。電子機器メーカーによって同じ部材が異なる名称で呼ばれる場合があることは当業者であれば理解できるであろう。本明細書は、機能ではなく名称によって部材を識別することを意図するものではない。以下に示す説明および請求項において、「〜を含む」あるいは「〜を備えている」という用語は、非制限的な用法で用いられるものであり、「〜」のみを構成要素とすることを示すものではない。また、「接続する」という用語は、電気的に直接接続されている場合と、電気的に間接的に接続されている場合のいずれの場合も含む。ある装置が他の装置と接続されている場合、その接続は、電気的に直接接続されているものであってもよく、他の装置あるいは他の接続を介して間接的に接続されているものであってもよい。
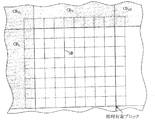
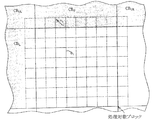
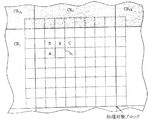
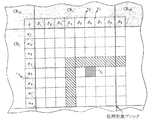
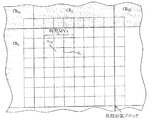
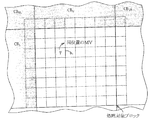
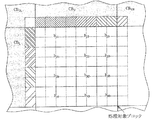
例えば、符号化ユニットがブロックの場合、符号化ユニットCU(t0−1)は符号化ユニットCU(t0)に対応する位置のブロックであってもよい。その結果、複数の重み付けパラメータ{hk(i,x)}を動きベクトル群{vk}によって得られた複数の参照画素値{Ψr}に適用することにより、上記予備処理部は、動きベクトル群{vk}(例えばvA、vB,およびvTなど)によって示される部分画像を混合/ミックスすることで重み付け合計画像を生成し、この重み付け合計画像を特定サブ符号化ユニット(例えば図1Cに示したサブ符号化ユニットSubCU(t0)など)の予測部分画像として用いることができる。上述した処理の詳細については図2に示されている。

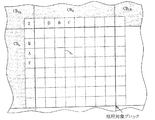
例えば、動きベクトル群{vk}が時間動きベクトルvT0,vTUL,vTU,vTUR,vTL,vTR,vTDL,vTD,およびvTDRと、動きベクトルvA,vB,vC,vD,vE,vF,およびvZとを含む場合、予測画素値ΨPは「ΨP=Weighted_Sum(Ψr(vA),Ψr(vB),Ψr(vC),Ψr(vD),Ψr(vE),Ψr(vF),Ψr(vZ),Ψr(vT0),Ψr(vTUL),Ψr(vTU),Ψr(vTUR),Ψr(vTL),Ψr(vTR),Ψr(vTDL),Ψr(vTD),Ψr(vTDR))」で表される。ここで、「Weighted_Sum」は重み付け合計を示している。この変形例についての上述した説明と同様の部分については説明を省略する。
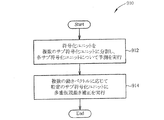
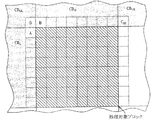
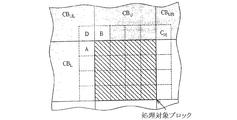
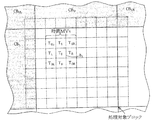
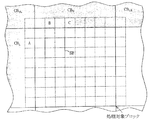
・ 図11は、図2に示した方法910の詳細を示す図である。この実施例では、上記予備処理部は、ステップ912において、符号化ユニットCU(t0)(例えば処理対象の符号化ユニット)を複数のサブ符号化ユニット{SubCU(t0)}に分割し、各サブ符号化ユニットの予測を行う。ただし、上述した動きベクトル{vk}などの動き情報を取得するとき、あるいは取得する前に、上記予備処理部が、他のサブ符号化ユニット/符号化ユニットによって後から参照できるように各サブ符号化ユニットの動きベクトル(例えば参照動きベクトル)を選択する。動きベクトルを選択するためのルールは、符号化および復号化の両方に適用できるルールであればよく、任意に決めることができる。例えば、動きベクトルを選択するための予め設定されたルールとして、H.264で規定されている動きベクトル予測(motion vector predictor defined in H.264)を用いてもよい。この方法では、動きベクトルのスケーリング(scaling)、左側ブロックからのパディング(padding)、上側ブロックからのパディング、左側ブロックまたは右側ブロックからのパディングを行う。左側ブロックあるいは上側ブロックからパディングを行うことにより、上記予備処理部は、例えば符合化ユニットCU(t0)に隣接する隣接符合化ユニットCUADJ(t0)における符合化済みサブ符合化ユニットなどの、他の符合化ユニット(処理対象である符号化ユニットCU(t0)とは異なる符合化ユニット)の動きベクトルを用いる1つの動きベクトルを選択する。より具体的には、上記他の符号化ユニット(例えば符号化ユニットCUADJ(t0))の上記サブ符号化ユニットは、上記他の符号化ユニット内における最も近接するサブ符号化ユニットであり、上記予備処理部は、上記特定サブ符号化ユニットSubCU(t0)の動きベクトルとして上記他の符号化ユニット(例えば符号化ユニットCUADJ(t0))内における最も近接するサブ符号化ユニットの動きベクトルを用いる。符号化ユニットあるいはサブ符号化ユニットについて選択された上記動きベクトルは、主に他の符号化ユニットあるいは他のサブ符号化ユニットのための参照動きベクトルとして用いられ、必ずしも動き予測のために用いられる必要はない。
Claims (16)
- 符号化ユニットの映像符号化時に局所的多重仮説予測を行う方法であって、
上記符号化ユニットを複数のサブ符号化ユニットに分割する分割工程と、
上記各サブ符号化ユニットを処理する処理工程とを含み、
上記処理工程は、
上記サブ符号化ユニットのうちの特定のサブ符号化ユニットの多重仮説動き補正のために符号化済みユニットの第1セットの動き情報を取得する取得工程と、
符号化済みユニットの上記第1セットの動き情報から得られる複数の画素値の線形結合を上記特定のサブ符号化ユニットの予測画素値として用いる利用工程と、
符号化済みユニットの上記第1セットに含まれない少なくとも1つの符号化済みユニットを含む符号化済みユニットの第2セットの動き情報を用いて、上記符号化ユニットにおける他のサブ符号化ユニットの予測画素値を算出する算出工程とを含み、
上記処理工程において、複数セットの動きベクトルから1セットの動きベクトルを符号化済みユニットの上記第1セットの動き情報として動的に選択し、選択した上記動きベクトルのセットを用いて上記特定のサブ符号化ユニットの上記予測画素値を取得することを特徴とする方法。 - 上記利用工程において、上記複数の画素値の重み付け合計を上記特定のサブ符号化ユニットの予測画素値として用いることを特徴とする請求項1に記載の方法。
- 上記利用工程において、現在の画素の実際の画素値に対応する複数の画素値に最適化ウィーナーフィルタリング処理を行うことにより上記複数の画素についての重み付けパラメータを調整して上記重み付け合計を生成することを特徴とする請求項2に記載の方法。
- 符号化済みユニットの上記第1セットの動き情報は、動きベクトル、参照フレームインデックス、および予測方向のうちのいずれか1つ、または2つ以上の組み合わせを少なくとも含むことを特徴とする請求項1に記載の方法。
- 符号化済みユニットの上記第1セットの動き情報は、単一のサブ符号化ユニットまたは単一の符号化ユニットから得られる複数の動きベクトルを含むことを特徴とする請求項4に記載の方法。
- 上記処理工程は、少なくとも1つの動きベクトルの極端な値を廃棄し、複数の動きベクトルのうちの残りの部分を符号化済みユニットの上記第1セットの動き情報として選択する選別工程を含むことを特徴とする請求項1に記載の方法。
- 上記複数セットの動きベクトルは、時間的な動きベクトルからなる第1セットの動きベクトルと、空間的な動きベクトルからなる第2セットの動きベクトルとを含むことを特徴とする請求項1に記載の方法。
- 上記処理工程において、複数セットの動きベクトルから1セットの動きベクトルを動的に選択し、明示されるフラグに基づいて、選択した動きベクトルのセットを符号化済みユニットの上記第1セットの上記動き情報として用いることを特徴とする請求項1に記載の方法。
- 上記分割工程において、上記特定のサブ符号化ユニットのサイズを、上記符号化ユニットの映像符号化に関する変換サイズに設定することを特徴とする請求項1に記載の方法。
- 上記分割工程において、少なくとも1つの隣接する符号化ユニットの少なくとも1つのモードに基づいて上記符号化ユニットを複数のサブ符号化ユニットに分割することを特徴とする請求項1に記載の方法。
- 上記分割工程において、少なくとも1つの隣接する符号化ユニットの内容または分割部分に基づいて上記符号化ユニットを複数のサブ符号化ユニットに分割することを特徴とする請求項1に記載の方法。
- 上記符号化ユニットは、少なくとも1つの空間的に符号化されたサブ符号化ユニットまたは符号化ユニット、および/または、少なくとも1つの時間的に符号化されたサブ符号化ユニットまたは符号化ユニットを含むことを特徴とする請求項1に記載の方法。
- 上記処理工程は、上記特定のサブ符号化ユニットの予測画素値を得るために、レート歪み最適化処理を用いた動き評価処理によって上記符号化ユニットの少なくとも1つの動きベクトルを取得する工程を含むことを特徴とする請求項1に記載の方法。
- 上記処理工程において、上記動き情報を取得するときに、各サブ符号化ユニットについての参照動きベクトルを指定することを特徴とする請求項1に記載の方法。
- 他の符号化ユニットにおけるサブ符号化ユニットの動きベクトルを用いている上記参照動きベクトルを指定することを特徴とする請求項14に記載の方法。
- 符号化ユニットの映像符号化時に局所的な多重仮説予測を行う装置であって、
上記符号化ユニットに映像符号化を行う処理回路を備え、
上記処理回路は、
上記符号化ユニットを複数のサブ符号化ユニットに分割し、複数の上記サブ符号化ユニットのうちの特定のサブ符号化ユニットに多重仮説動き補正処理を行うために符号化済みユニットの第1セットの動き情報を取得し、上記動き情報に応じて上記特定のサブ符号化ユニットに多重仮説動き補正を施し、符号化済みユニットの上記第1セットの動き情報から得られる複数の画素値の線形結合を上記特定のサブ符号化ユニットの予測画素値として用いる処理を各サブ符号化ユニットに対して行う予備処理部と、
上記予備処理部によって実行された上記多重仮説動き補正に基づいて上記符号化ユニットの映像符号化を行う少なくとも1つの符号化部とを備え、
上記予備処理部は、符号化済みユニットの上記第1セットには含まれない符号化ユニットを少なくとも1つ含む符号化済みユニットの第2セットの動き情報を用いて上記符号化ユニットにおける他のサブ符号化ユニットの予測画素値を算出し、
上記処理回路は、複数セットの動きベクトルから1セットの動きベクトルを符号化済みユニットの上記第1セットの動き情報として動的に選択し、選択した上記動きベクトルのセットを用いて上記特定のサブ符号化ユニットの上記予測画素値を取得することを特徴とする装置。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US32394810P | 2010-04-14 | 2010-04-14 | |
| US61/323,948 | 2010-04-14 | ||
| US13/080,668 | 2011-04-06 | ||
| US13/080,668 US8879620B2 (en) | 2010-04-14 | 2011-04-06 | Method for performing localized multihypothesis prediction during video coding of a coding unit, and associated apparatus |
| PCT/CN2011/072783 WO2011127828A1 (en) | 2010-04-14 | 2011-04-14 | Method for performing localized multihypothesis prediction during video coding of a coding unit, and associated apparatus |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012513179A JP2012513179A (ja) | 2012-06-07 |
| JP5211263B2 true JP5211263B2 (ja) | 2013-06-12 |
Family
ID=44788180
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012510110A Active JP5211263B2 (ja) | 2010-04-14 | 2011-04-14 | 符号化ユニットの映像符号化時に局所的多重仮説予測を行う方法および装置 |
Country Status (11)
| Country | Link |
|---|---|
| US (3) | US8837592B2 (ja) |
| EP (2) | EP3220646A1 (ja) |
| JP (1) | JP5211263B2 (ja) |
| KR (1) | KR101452921B1 (ja) |
| CN (5) | CN107071472A (ja) |
| AU (1) | AU2011240486B2 (ja) |
| BR (1) | BR112012025275B8 (ja) |
| IL (2) | IL222337A (ja) |
| RU (1) | RU2530318C2 (ja) |
| TW (4) | TWI469645B (ja) |
| WO (1) | WO2011127828A1 (ja) |
Families Citing this family (41)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9118929B2 (en) | 2010-04-14 | 2015-08-25 | Mediatek Inc. | Method for performing hybrid multihypothesis prediction during video coding of a coding unit, and associated apparatus |
| US8971400B2 (en) * | 2010-04-14 | 2015-03-03 | Mediatek Inc. | Method for performing hybrid multihypothesis prediction during video coding of a coding unit, and associated apparatus |
| WO2012081895A1 (ko) * | 2010-12-13 | 2012-06-21 | 한국전자통신연구원 | 인트라 예측 방법 및 그 장치 |
| KR102086145B1 (ko) * | 2010-12-13 | 2020-03-09 | 한국전자통신연구원 | 인트라 예측 방법 및 그 장치 |
| KR101831311B1 (ko) | 2010-12-31 | 2018-02-23 | 한국전자통신연구원 | 영상 정보 부호화 방법 및 복호화 방법과 이를 이용한 장치 |
| KR101547041B1 (ko) | 2011-01-12 | 2015-08-24 | 미쓰비시덴키 가부시키가이샤 | 화상 부호화 장치, 화상 복호 장치, 화상 부호화 방법 및 화상 복호 방법 |
| US9769472B2 (en) * | 2011-08-17 | 2017-09-19 | Mediatek Singapore Pte. Ltd. | Method and apparatus for Intra prediction using non-square blocks |
| US9736489B2 (en) * | 2011-09-17 | 2017-08-15 | Qualcomm Incorporated | Motion vector determination for video coding |
| US9386305B2 (en) * | 2011-11-28 | 2016-07-05 | Qualcomm Incorporated | Largest coding unit (LCU) or partition-based syntax for adaptive loop filter and sample adaptive offset in video coding |
| WO2013095616A1 (en) * | 2011-12-23 | 2013-06-27 | Intel Corporation | Apparatus and method for selecting elements of a vector computation |
| WO2013107028A1 (en) * | 2012-01-19 | 2013-07-25 | Mediatek Singapore Pte. Ltd. | Methods and apparatuses of amvp simplification |
| KR102030205B1 (ko) | 2012-01-20 | 2019-10-08 | 선 페이턴트 트러스트 | 시간 움직임 벡터 예측을 사용하여 비디오를 부호화 및 복호하는 방법 및 장치 |
| CN107396101B (zh) | 2012-02-03 | 2019-12-20 | 太阳专利托管公司 | 图像编码方法及图像编码装置 |
| CA2866121C (en) | 2012-03-06 | 2018-04-24 | Panasonic Intellectual Property Corporation Of America | Moving picture coding method, moving picture decoding method, moving picture coding apparatus, moving picture decoding apparatus, and moving picture coding and decoding apparatus |
| US9544612B2 (en) * | 2012-10-04 | 2017-01-10 | Intel Corporation | Prediction parameter inheritance for 3D video coding |
| US11032568B2 (en) * | 2013-11-27 | 2021-06-08 | Hfi Innovation Inc. | Method of video coding using prediction based on intra picture block copy |
| CN111193929B (zh) * | 2013-12-16 | 2022-04-12 | 浙江大学 | 一种前向双假设编码图像块的编解码方法和装置 |
| KR101789954B1 (ko) * | 2013-12-27 | 2017-10-25 | 인텔 코포레이션 | 차세대 비디오 코딩을 위한 콘텐츠 적응적 이득 보상된 예측 |
| JP6482191B2 (ja) | 2014-06-12 | 2019-03-13 | キヤノン株式会社 | 画像符号化装置、画像符号化方法及びプログラム、画像復号装置、画像復号方法及びプログラム |
| GB2531001B (en) | 2014-10-06 | 2019-06-05 | Canon Kk | Method and apparatus for vector encoding in video coding and decoding |
| US10958927B2 (en) | 2015-03-27 | 2021-03-23 | Qualcomm Incorporated | Motion information derivation mode determination in video coding |
| TWI610558B (zh) * | 2016-05-26 | 2018-01-01 | 晨星半導體股份有限公司 | 位元分配方法及視訊編碼裝置 |
| WO2018097692A2 (ko) * | 2016-11-28 | 2018-05-31 | 한국전자통신연구원 | 영상 부호화/복호화 방법, 장치 및 비트스트림을 저장한 기록 매체 |
| WO2018128345A2 (ko) * | 2017-01-04 | 2018-07-12 | 삼성전자 주식회사 | 복호화 방법 및 그 장치 |
| US20190246114A1 (en) | 2018-02-02 | 2019-08-08 | Apple Inc. | Techniques of multi-hypothesis motion compensation |
| US11924440B2 (en) | 2018-02-05 | 2024-03-05 | Apple Inc. | Techniques of multi-hypothesis motion compensation |
| US11381834B2 (en) | 2018-04-02 | 2022-07-05 | Hfi Innovation Inc. | Video processing methods and apparatuses for sub-block motion compensation in video coding systems |
| US10986343B2 (en) * | 2018-04-15 | 2021-04-20 | Arris Enterprises Llc | Reducing overhead for multiple-hypothesis temporal prediction |
| US11343541B2 (en) * | 2018-04-30 | 2022-05-24 | Hfi Innovation Inc. | Signaling for illumination compensation |
| WO2019229683A1 (en) * | 2018-05-31 | 2019-12-05 | Beijing Bytedance Network Technology Co., Ltd. | Concept of interweaved prediction |
| CN110620929B (zh) | 2018-06-19 | 2023-04-18 | 北京字节跳动网络技术有限公司 | 没有运动矢量预测截断的选择的运动矢量差精度 |
| WO2020008349A1 (en) * | 2018-07-02 | 2020-01-09 | Beijing Bytedance Network Technology Co., Ltd. | Merge index coding |
| CN110602493B (zh) * | 2018-09-19 | 2022-06-10 | 北京达佳互联信息技术有限公司 | 一种仿射运动补偿的交织预测的方法及设备 |
| EP4325859A3 (en) | 2018-09-19 | 2024-05-15 | Beijing Bytedance Network Technology Co., Ltd. | Syntax reuse for affine mode with adaptive motion vector resolution |
| CN110944171B (zh) * | 2018-09-25 | 2023-05-09 | 华为技术有限公司 | 一种图像预测方法和设备 |
| CN111050164B (zh) * | 2018-10-15 | 2022-05-17 | 华为技术有限公司 | 一种编解码的方法和装置 |
| EP3881552A4 (en) * | 2018-11-15 | 2022-07-20 | Telefonaktiebolaget Lm Ericsson (Publ) | DEBLOCKING ON A VIDEO ENCODER AND/OR VIDEO DECODER |
| CN113597760A (zh) | 2019-01-02 | 2021-11-02 | 北京字节跳动网络技术有限公司 | 视频处理的方法 |
| CN113412623A (zh) | 2019-01-31 | 2021-09-17 | 北京字节跳动网络技术有限公司 | 记录仿射模式自适应运动矢量分辨率的上下文 |
| EP3918804A4 (en) | 2019-03-14 | 2023-02-08 | HFI Innovation Inc. | METHODS AND APPARATUS FOR VIDEO PROCESSING USING MOTION DECOMPOSITION AND SUB-PARTITION BASE FILLING |
| CN110852500B (zh) * | 2019-11-01 | 2023-04-07 | 聊城大学 | 一种资源受限混合流水车间优化方法 |
Family Cites Families (39)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2231751B (en) | 1989-04-27 | 1993-09-22 | Sony Corp | Motion dependent video signal processing |
| EP0421526B1 (en) | 1989-10-06 | 1996-07-31 | Koninklijke Philips Electronics N.V. | Adaptive ghost cancellation circuit |
| US5134475A (en) | 1990-12-11 | 1992-07-28 | At&T Bell Laboratories | Adaptive leak hdtv encoder |
| KR970002964B1 (ko) | 1993-12-24 | 1997-03-13 | 대우전자 주식회사 | 영상신호의 시간축 내삽필터 |
| EP1274252A3 (en) * | 1995-08-29 | 2005-10-05 | Sharp Kabushiki Kaisha | Video coding device and video decoding device with a motion compensated interframe prediction |
| WO1997046020A2 (en) | 1996-05-24 | 1997-12-04 | Philips Electronics N.V. | Motion vector processing |
| JP3633159B2 (ja) * | 1996-12-18 | 2005-03-30 | ソニー株式会社 | 動画像信号符号化方法及び装置、並びに動画像信号伝送方法 |
| US6807231B1 (en) * | 1997-09-12 | 2004-10-19 | 8×8, Inc. | Multi-hypothesis motion-compensated video image predictor |
| US6532265B1 (en) | 1999-03-25 | 2003-03-11 | Imec Vzw | Method and system for video compression |
| JP2000299864A (ja) * | 1999-04-12 | 2000-10-24 | Canon Inc | 動画像処理方法 |
| US6633677B1 (en) | 1999-12-30 | 2003-10-14 | Stmicroelectronics, Inc. | Method and apparatus for processing an image in an image compression/decompression system that uses hierachical coding |
| US6438168B2 (en) | 2000-06-27 | 2002-08-20 | Bamboo Media Casting, Inc. | Bandwidth scaling of a compressed video stream |
| US20040001546A1 (en) * | 2002-06-03 | 2004-01-01 | Alexandros Tourapis | Spatiotemporal prediction for bidirectionally predictive (B) pictures and motion vector prediction for multi-picture reference motion compensation |
| US20040141555A1 (en) * | 2003-01-16 | 2004-07-22 | Rault Patrick M. | Method of motion vector prediction and system thereof |
| US7184602B2 (en) * | 2003-05-02 | 2007-02-27 | Microsoft Corp. | System and method for low bandwidth video streaming for face-to-face teleconferencing |
| HUP0301368A3 (en) * | 2003-05-20 | 2005-09-28 | Amt Advanced Multimedia Techno | Method and equipment for compressing motion picture data |
| ES2343410T3 (es) | 2003-06-25 | 2010-07-30 | Thomson Licensing | Codificacion intertramas con decision rapida de modo. |
| KR101050828B1 (ko) * | 2003-08-26 | 2011-07-21 | 톰슨 라이센싱 | 하이브리드 인트라-인터 코딩된 블록을 디코딩하기 위한 방법 및 장치 |
| US7599438B2 (en) * | 2003-09-07 | 2009-10-06 | Microsoft Corporation | Motion vector block pattern coding and decoding |
| JP3880985B2 (ja) * | 2004-08-05 | 2007-02-14 | 松下電器産業株式会社 | 動きベクトル検出装置および動きベクトル検出方法 |
| US7447337B2 (en) * | 2004-10-25 | 2008-11-04 | Hewlett-Packard Development Company, L.P. | Video content understanding through real time video motion analysis |
| RU2368095C1 (ru) * | 2005-07-22 | 2009-09-20 | Мицубиси Электрик Корпорейшн | Кодер изображения и декодер изображения, способ кодирования изображения и способ декодирования изображения, программа кодирования изображения и программа декодирования изображения и компьютерно-считываемый носитель записи, на котором записана программа кодирования изображения, и компьютерно-считываемый носитель записи, на котором записана программа декодирования изображения |
| JP2007142521A (ja) | 2005-11-15 | 2007-06-07 | Sharp Corp | 動きベクトル算出装置および動きベクトル算出方法 |
| JP4763549B2 (ja) * | 2006-08-18 | 2011-08-31 | 富士通セミコンダクター株式会社 | フレーム間予測処理装置、画像符号化装置、及び画像復号化装置 |
| CN101222627A (zh) * | 2007-01-09 | 2008-07-16 | 华为技术有限公司 | 一种多视点视频编解码系统以及预测向量的方法和装置 |
| KR101366241B1 (ko) * | 2007-03-28 | 2014-02-21 | 삼성전자주식회사 | 영상 부호화, 복호화 방법 및 장치 |
| JP4325708B2 (ja) * | 2007-07-05 | 2009-09-02 | ソニー株式会社 | データ処理装置、データ処理方法およびデータ処理プログラム、符号化装置、符号化方法および符号化プログラム、ならびに、復号装置、復号方法および復号プログラム |
| JP4786612B2 (ja) * | 2007-08-14 | 2011-10-05 | Kddi株式会社 | 動画像符号化装置の予測動きベクトル生成装置 |
| US8000411B2 (en) * | 2008-01-04 | 2011-08-16 | Qualcomm Incorporated | Decoding scheme using multiple hypotheses about transmitted messages |
| JP4990927B2 (ja) | 2008-03-28 | 2012-08-01 | 三星電子株式会社 | 動きベクトル情報の符号化/復号化方法及び装置 |
| US8195001B2 (en) | 2008-04-09 | 2012-06-05 | Intel Corporation | In-loop adaptive wiener filter for video coding and decoding |
| WO2009126260A1 (en) | 2008-04-11 | 2009-10-15 | Thomson Licensing | Methods and apparatus for template matching prediction (tmp) in video encoding and decoding |
| US8908763B2 (en) * | 2008-06-25 | 2014-12-09 | Qualcomm Incorporated | Fragmented reference in temporal compression for video coding |
| CN102160384A (zh) | 2008-09-24 | 2011-08-17 | 索尼公司 | 图像处理设备和方法 |
| US8634457B2 (en) * | 2008-09-26 | 2014-01-21 | Qualcomm Incorporated | Determining availability of video data units |
| US8660176B2 (en) * | 2008-09-26 | 2014-02-25 | Qualcomm Incorporated | Resolving geometric relationships among video data units |
| US8724697B2 (en) * | 2008-09-26 | 2014-05-13 | Qualcomm Incorporated | Locating motion vectors for video data units |
| KR101279573B1 (ko) * | 2008-10-31 | 2013-06-27 | 에스케이텔레콤 주식회사 | 움직임 벡터 부호화 방법 및 장치와 그를 이용한 영상 부호화/복호화 방법 및 장치 |
| JP4957780B2 (ja) | 2009-11-20 | 2012-06-20 | カシオ計算機株式会社 | 動き補償予測符号化装置、動き補償予測符号化方法及びプログラム |
-
2011
- 2011-01-10 US US12/987,170 patent/US8837592B2/en active Active
- 2011-04-06 TW TW100111824A patent/TWI469645B/zh active
- 2011-04-06 TW TW103141276A patent/TWI520586B/zh active
- 2011-04-06 TW TW103141274A patent/TWI514855B/zh active
- 2011-04-06 US US13/080,668 patent/US8879620B2/en active Active
- 2011-04-11 CN CN201611016484.4A patent/CN107071472A/zh active Pending
- 2011-04-11 CN CN2011100893826A patent/CN102223542A/zh active Pending
- 2011-04-11 CN CN201610395363.9A patent/CN105872558B/zh active Active
- 2011-04-12 TW TW100112709A patent/TWI445411B/zh active
- 2011-04-14 RU RU2012141233/08A patent/RU2530318C2/ru active
- 2011-04-14 AU AU2011240486A patent/AU2011240486B2/en active Active
- 2011-04-14 CN CN201610268589.2A patent/CN105791858B/zh active Active
- 2011-04-14 EP EP17170102.2A patent/EP3220646A1/en not_active Ceased
- 2011-04-14 EP EP11729244.1A patent/EP2559250B1/en active Active
- 2011-04-14 JP JP2012510110A patent/JP5211263B2/ja active Active
- 2011-04-14 CN CN201180001047.4A patent/CN102907095B/zh active Active
- 2011-04-14 KR KR1020127025321A patent/KR101452921B1/ko active IP Right Grant
- 2011-04-14 WO PCT/CN2011/072783 patent/WO2011127828A1/en active Application Filing
- 2011-04-14 BR BR112012025275A patent/BR112012025275B8/pt active IP Right Grant
- 2011-10-11 US US13/270,249 patent/US8891608B2/en active Active
-
2012
- 2012-10-10 IL IL222337A patent/IL222337A/en active IP Right Grant
-
2016
- 2016-05-04 IL IL245480A patent/IL245480B/en active IP Right Grant
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5211263B2 (ja) | 符号化ユニットの映像符号化時に局所的多重仮説予測を行う方法および装置 | |
| EP3632104B1 (en) | Motion vector refinement for multi-reference prediction | |
| CN111937391B (zh) | 用于视频编解码系统中的子块运动补偿的视频处理方法和装置 | |
| WO2018127188A1 (en) | Multi-hypotheses merge mode | |
| CN107979759B (zh) | 选择运动矢量预测值的方法和使用其的设备 | |
| JP5490823B2 (ja) | 画像の系列を表すストリームを復号化する方法、画像の系列を符号化する方法及び符号化データ構造 | |
| JP5277257B2 (ja) | 動画像復号化方法および動画像符号化方法 | |
| TW201944781A (zh) | 視訊編解碼系統中具有重疊塊運動補償的視訊處理的方法以及裝置 | |
| EP2699001B1 (en) | A method and a system for video signal encoding and decoding with motion estimation | |
| EP2323402A1 (en) | Improved video coding methods and apparatuses | |
| WO2020098803A1 (en) | Harmonization between affine mode and other inter coding tools | |
| JP2020526112A (ja) | 動きベクトルの改良のための探索領域 | |
| CN113302917A (zh) | 局部照明补偿的改进方法 | |
| US20090028241A1 (en) | Device and method of coding moving image and device and method of decoding moving image | |
| WO2017010073A1 (ja) | 動画像符号化装置、動画像符号化方法および動画像符号化プログラムを記憶する記録媒体 | |
| CN110557639B (zh) | 交织预测的应用 | |
| US20230388484A1 (en) | Method and apparatus for asymmetric blending of predictions of partitioned pictures |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110615 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110615 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121119 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121127 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130110 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130205 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130225 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160301 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5211263 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |