JP5159955B2 - 適応的ビデオ・エンコーダ制御 - Google Patents
適応的ビデオ・エンコーダ制御 Download PDFInfo
- Publication number
- JP5159955B2 JP5159955B2 JP2011527060A JP2011527060A JP5159955B2 JP 5159955 B2 JP5159955 B2 JP 5159955B2 JP 2011527060 A JP2011527060 A JP 2011527060A JP 2011527060 A JP2011527060 A JP 2011527060A JP 5159955 B2 JP5159955 B2 JP 5159955B2
- Authority
- JP
- Japan
- Prior art keywords
- multiplier
- lagrangian
- lagrangian multiplier
- lagrange
- coding
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images












Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/189—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the adaptation method, adaptation tool or adaptation type used for the adaptive coding
- H04N19/19—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the adaptation method, adaptation tool or adaptation type used for the adaptive coding using optimisation based on Lagrange multipliers
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/103—Selection of coding mode or of prediction mode
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/103—Selection of coding mode or of prediction mode
- H04N19/105—Selection of the reference unit for prediction within a chosen coding or prediction mode, e.g. adaptive choice of position and number of pixels used for prediction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/146—Data rate or code amount at the encoder output
- H04N19/147—Data rate or code amount at the encoder output according to rate distortion criteria
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/17—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object
- H04N19/172—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object the region being a picture, frame or field
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/17—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object
- H04N19/176—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object the region being a block, e.g. a macroblock
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/177—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being a group of pictures [GOP]
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/189—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the adaptation method, adaptation tool or adaptation type used for the adaptive coding
- H04N19/196—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the adaptation method, adaptation tool or adaptation type used for the adaptive coding being specially adapted for the computation of encoding parameters, e.g. by averaging previously computed encoding parameters
Description
本願は、2008年9月16日に提出された米国特許仮出願第61/097269号の優先権を主張するものであり、参照によってその内容全体を本願明細書に引用したものとする。
本開示は、全般的にビデオ技術に関し、特にビデオ符号化に関する。
本発明の実施形態は、ビデオのコード化に関する。第1のラグランジュ乗数がビデオ・エンコーダにより判断され、第1のラグランジュ乗数により第2のラグランジュ乗数を更新する。

スケーラブル(例えばSVC)およびマルチビュー符号化システム(例えばMVC)を含むビデオ圧縮システムおよび標準(例えばISO MPEG−1、MPEG−2、MPEG−4、MPEG−4 AVC/ITU−T H.264、MPEG−4シンプル(SP:simple profile)およびアドバンスド・シンプル(ASP:Advanced Simple Profiles)プロファイル、H.261、H.263、AVS、ならびにVC−1など)は、適度なコストでビデオ・コンテンツを格納および配信する手法を提供することができる。ビデオ符号化最適化は、ビデオ圧縮システムの構成要素とすることができる。ビデオ符号化最適化は、高品質の視覚的エクスペリエンスを伴う高い符号化効率を提供することができる。ビデオ符号化最適化は、レート/歪最適化を考慮するとよく、これは、意志決定に関してビットレートおよび歪の両方の同時最適化を可能にする。あるいは、最適化は、歪またはビットレートを個別に考慮することもある。最適化はさらに、デコーダおよび/またはエンコーダの複雑度を含むパラメータを考慮することもあり、これは、計算資源の利用可能性(例えばメモリ状態および容量、電力消費)に関することもある。例えば、現代のビデオ符号化システムで高い符号化効率および視覚的品質を達成するために、レート歪最適化(RDO:rate distortion optimization)が使用可能である。
R(D)=aln(σ2/D) (8)
と表現され、式中、aは情報源の確率密度関数(pdf:probability density function)に依存する定数である。いくつかの実施形態における、λの所与の値に関するラグランジュ・コスト関数Jの最小化は、Dに対してJの導関数をゼロと等しくセットすることによって達成されることができ、これにより次が得られる。
λ=−(dD/dR(D))=D/a (10)
高レートにおける歪は、次のように表現できる。
c=4/(12・a) (13)
実施形態は、ビデオ情報源統計に少なくとも部分的に基づいて、ラグランジュ乗数の値を適応的に推定および更新することができるシステムに関する。例示の実施形態では、このプロセスは少なくとも2つのステップを伴うとよい。
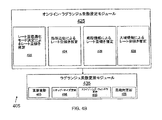
オンライン・ラグランジュ乗数推定(420)は、図4A〜図4Bに示されているように機能するとよい。図5は、ラグランジュ最適化関数500の例の図である。図5では、歪D315が、レートR320の関数として示されている。ラグランジュ・コスト関数の最小化が、ラグランジュ乗数の傾きを表す平面波により示されている。図500内の種々の領域550、555、560が、所与の歪値およびレートに関して異なる符号化パラメータ(例えば、量子化パラメータ、QP、フレーム・レート、解像度、符号化レイヤ)により複数回符号化可能な情報を有する。
いくつかの実施形態では、(DQP,RQP)における真の傾きλtrue535が、その隣接したQPポイントのレートおよび歪値により推定可能である。例えば、図5は、QP、QP+1、QP−1の歪およびレートを示す。いくつかの実施形態では、レートおよび歪値は、(DQP+l,RQP+l),l=−M,・・・,−1,1,・・・Nなど、様々なQPポイントを有することができ、MおよびNは、事前選択または適応的選択されることが可能である。事前選択は、数ある中でも特に、利用可能な計算資源、スライスまたはピクチャ符号化タイプ、利用可能な参照およびその現在の符号化単位との関係を考慮しての判断に少なくとも部分的に基づくことができる。適応的選択は、数ある中でも特に、現在利用可能な計算資源、ならびに例えば隣接したマクロブロックの特性など、ビデオ・シーケンスおよび領域特性を考慮する判断に少なくとも部分的に基づくことができる。
レート歪傾き推定は、局所近似により実行できる。こうした実施形態では、隣接したポイントの近似値が、複雑度の要件を緩和することができる。
いくつかの実施形態では、局所情報(例えばビデオ符号化特性および/または統計)が、ラグランジュ乗数を予測または推定するために使用可能である。より具体的には、ラグランジュ乗数は、
λestimate=flocal(Ilocal) (16)
として推定されることが可能であり、式中、flocal(・)は局所推定法であり、Ilocalは局所情報である。当該の情報は、数ある中でも、分散、輝度要素の平均、彩度要素、推定される動き強度、テクスチャおよびエッジ情報、ならびに空間的および時間的に隣接したエリアの特性および更新されたラグランジュ乗数を含むことができる。スケーラブル符号化など、特定の符号化への適用の場合、この情報はさらに、品質、解像度、ベースおよび拡張レイヤの間の複雑度の差異、トーン・マッピング特性、ならびに深度の差異も同じく含み得る。
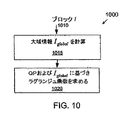
いくつかの実施形態では、ラグランジュ乗数を予測または推定するために大域情報が使用可能である。
λestimate=fglobal(Iglobal) (18)
とセットされることが可能であり、式中、fglobal(・)は大域推定法であり、Iglobalは大域情報である。大域情報は、フレーム・レート、輝度および彩度分散、DC値、および/またはDC値のヒストグラムなどの空間的特性、現在の符号化構造、および/またはメタデータ情報を含むことができる。例として、ラグランジュ乗数は、現在のグループ・オブ・ピクチャ(GOP)内のその階層レベルに少なくとも部分的に基づいて推定されることが可能である。
λk=(1−k・ΔGOP)・λanchor (19)
を含むことができ、式中、kは階層レベルの値であり、ΔGOPは変化のステップ・サイズである。
λk=(danchor/dGOP)・λanchor (20)
と表現でき、式中、dGOPはGOPのサイズであり、一例では8とすることができる。他のピクチャは、その最も近いアンカー・ピクチャまでの距離に少なくとも部分的に基づいて判断されるλを有することができる。
推定されたラグランジュ乗数λestimateは、得られた後、ラグランジュ乗数更新(430)において、現在の(または初期の)ラグランジュ乗数λcurrentを更新するために使用可能である。ラグランジュ乗数更新モジュール(430;図4B)は、少なくとも4つの技術のうちの1つ以上により機能するとよい。図12は、例示のラグランジュ乗数更新モジュール1200のブロック図を示す。λは、ブロック、フレーム、領域などに関して更新される(例えば置き換えられる)ことが可能である。λを更新するラグランジュ乗数更新モジュールは、直接更新(1250)、ステップ・サイズ更新(1255)、スライディング・ウィンドウ更新(1260)、および周期的更新(1265)のうちの1つ以上により機能するとよい。
この例示の技術(1250)では、現在のラグランジュ乗数λcurrentが、推定されたラグランジュ乗数λestimateにより置き換えられることが可能である。この方法では、現在のラグランジュ乗数自体が、推定された乗数(1252)により直接置き換えられる。
この例示技術(1255)では、ラグランジュ乗数は
λnew=λcurrent+Δ・(λestimate−λcurrent) (21)
として更新されることが可能であり、ステップ・サイズ0<Δ<1である(1259)。現在のラグランジュ乗数を更新するプロセスは、λnewを計算することを伴い、λcurrentは、現在のラグランジュ乗数を表し、λnewは、更新されたラグランジュ乗数を表し、Δは、プリセットまたは適応的に変更される値であり、λestimateは、ラグランジュ乗数の推定値を表す。
λnew=λcurrent+Δ・λcurrent・clip(MAX_Inc,MAX_Dec,((λestimate/λcurrent)−1.0)) (22)
として更新されることが可能であり、式中、MAX_IncおよびMAX_Decは、clip()関数の上限および下限であり、あらかじめ定められること、または適応的に変更されることが可能である(1259)。例えば、MAX_IncおよびMAX_Decがそれぞれ0.1および−0.1となるようセットされると、ラグランジュ乗数は、0.1・Δ・λcurrentだけ増減されることが可能である。
この例示の技術(1260)では、ラグランジュ乗数が、推定される傾きの値と共に、以前のマクロブロックおよび現在のマクロブロック(または他の領域)におけるラグランジュ乗数の「スライディング・ウィンドウ」平均に少なくとも部分的に基づいて更新されることが可能である。複数のλを所与として別のλを判断するためのλのスライディング・ウィンドウを形成する、いくつかのλがあるとよい。
λnew=fSW(λ0,λ1,・・・,λn) (23)
としてセットされることが可能であり、式中、fsw(・)は、現在および以前のラグランジュ乗数を考慮することができる任意のスライディング・ウィンドウ推定法であり、λ0=λestimate、λ1=λcurrentおよびλk,k=2,・・・,Mは以前のマクロブロックまたは他の領域に関するラグランジュ乗数である(1267)。例えば、いくつかの実施形態では、fSW(・)は、いくつかのラグランジュ乗数の平均の関数とすることができる。
この例示の方法(1265)では、ラグランジュ乗数は、上述の更新方法のうちのいずれかを使用して周期的に更新されることが可能である(例えば、直接更新1250、ステップ・サイズ更新1255、スライディング・ウィンドウ更新1260)(1269)。周期自体は、あらかじめ定められること、または動き強度もしくはシーン・カット情報などの局所コンテキストに従い適応的にセットされることが可能である。周期的更新は、特に類似した特性を有するエリアに関して、ビデオ・システムの低い計算複雑度をもたらすことができる。
図13は、本願明細書に記載されているラグランジュの技術の任意のもの(または任意の組み合わせ)を採用することができるシステム図を示す。様々なビデオ符号化および/または表示構成要素が図13に示されている。この技術は、1つ以上のコンピュータ1305A、1305B上で使用されることが可能である。本願明細書の1つ以上の方法(例えばアルゴリズム、プロセス)が、コンピュータおよび/またはビデオ表示1320、伝送、処理および再生システムにより実装されること、またはそれにおいて採用されることが可能である。本願明細書に記載されるコンピュータは、汎用でも、またはワークステーションなど何らかの特定目的のコンピュータでもよく、任意の種類のコンピュータとしてよい。コンピュータ1305Bは、例えばWindows XP(商標)、Vista(商標)、もしくはLinuxを実行するインテルまたはAMDに基づくコンピュータであっても、またはMacintosh(商標)コンピュータであってもよい。実施形態は、PDA(personal digital assistant:携帯情報端末)1315などのハンドヘルド・コンピュータ、携帯電話1310、またはラップトップ1305Aにも関連し得る。コンピュータはさらに、イメージ記録または受信1325、1330、1335、処理、格納1340、およびデータ、特にビデオ・データの分配のための機械または機械の一部を指し得る。
ビデオ・エンコーダにより第1のラグランジュ乗数を判断することと、
第1のラグランジュ乗数により第2のラグランジュ乗数を更新することと、
を含む、方法。
第1のラグランジュ乗数を第3のラグランジュ乗数により置き換えることにより、第1のラグランジュ乗数を更新することと、
をさらに含む、列挙されている例示の実施形態1の方法。
すべてのラグランジュ乗数の関数に少なくとも部分的に基づき、ビデオ・エンコーダによりフレームをコード化することと、
をさらに含む、列挙されている例示の実施形態1の方法。
全体的なラグランジュ・コスト関数が最小化されるモードを判断することと、
現在のラグランジュ乗数λcurrentを用いる現在の符号化パラメータに関して、全体的なラグランジュ・コスト関数が最小化されるモードπ*を判断することと、
を含む、列挙されている例示の実施形態24の方法。
計算された局所情報および符号化パラメータに少なくとも部分的に基づいて、第1のラグランジュ乗数を判断することと、
をさらに含む、列挙されている例示の実施形態30の方法。
エリアに関して複数の分散を計算することと、
複数の量子化パラメータ(QP)に関して複数のラグランジュ乗数を推定することと、
K個のビンにより(K+1)グループに複数の分散を配置することと、
L個のビンにより複数グループに複数のQPを配置することと、
K個およびL個のビンに少なくとも部分的に基づいて、グループそれぞれに関して平均ラグランジュ乗数を計算することと、
平均ラグランジュ乗数を、ラグランジュ乗数ルックアップ・テーブル内に記録することと、
を含む、列挙されている例示の実施形態30の方法。
大域情報を計算することと、
計算された大域情報および符号化パラメータに少なくとも部分的に基づいて第1のラグランジュ乗数を判断することと、
をさらに含む、列挙されている例示の実施形態36の方法。
階層レベル、グループ・オブ・ピクチャ(GOP)のピクチャ間の変化のステップ・サイズ、およびGOPのアンカー・ピクチャの関数として第1のラグランジュ乗数λkをセットすることであって、kは階層レベルを表し、ΔGOPはGOPのピクチャ間の変化のステップ・サイズを表し、λanchorはGOPのアンカー・ピクチャを表し、λk=(1−k・ΔGOP)・λanchorである、該セットすることと、
第1のラグランジュ乗数を計算することと、
をさらに含む、列挙されている例示の実施形態41の方法。
アンカー・ピクチャのラグランジュ乗数、およびアンカー・ピクチャの距離とGOP内の距離との比の関数として第1のラグランジュ乗数λkをセットすることであって、kは階層レベルを表し、λanchorはGOPのアンカー・ピクチャのラグランジュ乗数を表し、danchorはアンカー・ピクチャの距離を表し、dGOPはGOP内の距離を表し、λk=(danchor/dGOP)・λanchorである、該セットすることと、
第1のラグランジュ乗数を計算することと、
をさらに含む、列挙されている例示の実施形態41の方法。
ビデオ・エンコーダのラグランジュ乗数推定モジュールにより第1のラグランジュ乗数を推定することと、
第2のラグランジュ乗数を第1のラグランジュ乗数により置き換えることと、
を含む、列挙されている例示の実施形態1の方法。
1つ以上の以前のマクロブロックおよび現在のマクロブロックにおける複数のラグランジュ乗数のスライディング・ウィンドウ平均を計算すること
を含む、列挙されている例示の実施形態1の方法。
複数のラグランジュ乗数に関して、ラグランジュ乗数のスライディング・ウィンドウ用にラグランジュ乗数のサブセットを選択することと、
スライディング・ウィンドウの平均の関数として第2のラグランジュ乗数を更新することと、
をさらに含む、列挙されている例示の実施形態53の方法。
ビデオ・エンコーダにより少なくとも2つのマクロブロックの分散を計算することと、
2つの隣り合ったマクロブック間の分散の変化が閾値を上回れば、第2のラグランジュ乗数を更新することと、
を含む、列挙されている例示の実施形態55の方法。
第1のグループのラグランジュ乗数により第2のグループのラグランジュ乗数を更新することと、
をさらに含む、列挙されている例示の実施形態1の方法。
第1のラグランジュ乗数を第3のラグランジュ乗数により置き換えることにより、第1のラグランジュ乗数を更新すること
の命令をさらに含む、列挙されている例示の実施形態67のコンピュータ・プログラム製品。
すべてのラグランジュ乗数の関数に少なくとも部分的に基づき、ビデオ・エンコーダによりフレームをコード化すること
の命令をさらに含む、列挙されている例示の実施形態67のコンピュータ・プログラム製品。
全体的なラグランジュ・コスト関数が最小化されるモードを判断することと、
現在のラグランジュ乗数λcurrentを用いる現在の符号化パラメータに関して、全体的なラグランジュ・コスト関数が最小化されるモードπ*を判断することと、
lに関する歪およびレート値
を含む、列挙されている例示の実施形態90のコンピュータ・プログラム製品。
第1のラグランジュ乗数に関連するマクロブロックに関して、局所情報を計算することと、
計算された局所情報および符号化パラメータに少なくとも部分的に基づいて、第1のラグランジュ乗数を判断することと、
をさらに含む、列挙されている例示の実施形態96のコンピュータ・プログラム製品。
エリアに関して複数の分散を計算することと、
複数の量子化パラメータ(QP)に関して複数のラグランジュ乗数を推定することと、
K個のビンにより(K+1)グループに複数の分散を配置することと、
L個のビンにより複数グループに複数のQPを配置することと、
K個およびL個のビンに少なくとも部分的に基づいて、グループそれぞれに関して平均ラグランジュ乗数を計算することと、
平均ラグランジュ乗数を、ラグランジュ乗数ルックアップ・テーブル内に記録することと、
を含む、列挙されている例示の実施形態96のコンピュータ・プログラム製品。
大域情報を計算することと、
計算された大域情報および符号化パラメータに少なくとも部分的に基づいて第1のラグランジュ乗数を判断することと、
をさらに含む、列挙されている例示の実施形態102のコンピュータ・プログラム製品。
階層レベル、グループ・オブ・ピクチャ(GOP)のピクチャ間の変化のステップ・サイズ、およびGOPのアンカー・ピクチャの関数として第1のラグランジュ乗数λkをセットすることであって、kは階層レベルを表し、ΔGOPはGOPのピクチャ間の変化のステップ・サイズを表し、λanchorはGOPのアンカー・ピクチャを表し、λk=(1−k・ΔGOP)・λanchorである、該セットすることと、
第1のラグランジュ乗数を計算することと、
をさらに含む、列挙されている例示の実施形態107のコンピュータ・プログラム製品。
アンカー・ピクチャのラグランジュ乗数、およびアンカー・ピクチャの距離とGOP内の距離との比の関数として第1のラグランジュ乗数λkをセットすることであって、kは階層レベルを表し、λanchorはGOPのアンカー・ピクチャのラグランジュ乗数を表し、danchorはアンカー・ピクチャの距離を表し、dGOPはGOP内の距離を表し、λk=(danchor/dGOP)・λanchorである、該セットすることと、
第1のラグランジュ乗数を計算することと、
をさらに含む、列挙されている例示の実施形態107のコンピュータ・プログラム製品。
ビデオ・エンコーダのラグランジュ乗数推定モジュールにより第1のラグランジュ乗数を推定することと、
第2のラグランジュ乗数を第1のラグランジュ乗数により置き換えることと、
を含む、列挙されている例示の実施形態67のコンピュータ・プログラム製品。
1つ以上の以前のマクロブロックおよび現在のマクロブロックにおける複数のラグランジュ乗数のスライディング・ウィンドウ平均を計算すること
を含む、列挙されている例示の実施形態67のコンピュータ・プログラム製品。
複数のラグランジュ乗数に関して、ラグランジュ乗数のスライディング・ウィンドウ用にラグランジュ乗数のサブセットを選択することと、
スライディング・ウィンドウの平均の関数として第2のラグランジュ乗数を更新することと、
を含むビデ符号化動作をさらに含む、列挙されている例示の実施形態119のコンピュータ・プログラム製品。
ビデオ・エンコーダにより少なくとも2つのマクロブロックの分散を計算することと、
2つの隣り合ったマクロブック間の分散の変化が閾値を上回れば、第2のラグランジュ乗数を更新することと、
を含む、列挙されている例示の実施形態121のコンピュータ・プログラム製品。
ビデオ・エンコーダにより第1のグループのラグランジュ乗数を判断することと、
第1のグループのラグランジュ乗数により第2のグループのラグランジュ乗数を更新することと、
をさらに含む、列挙されている例示の実施形態67のコンピュータ・プログラム製品。
ビデオ・エンコーダのラグランジュ乗数推定モジュールを使用して、第3のラグランジュ乗数を判断すること、および
第1のラグランジュ乗数を第3のラグランジュ乗数により置き換えることにより、第1のラグランジュ乗数を更新すること
の命令を処理するよう動作可能である、列挙されている例示の実施形態133のシステム。
ピクチャの複数のマクロブロックまたはマクロブロックの領域に関して他のラグランジュ乗数を計算すること、および
すべてのラグランジュ乗数の関数に少なくとも部分的に基づき、ビデオ・エンコーダによりフレームをコード化すること
の命令を実行するよう動作可能である、列挙されている例示の実施形態133のシステム。
全体的なラグランジュ・コスト関数が最小化されるモードを判断することと、
現在のラグランジュ乗数λcurrentを用いる現在の符号化パラメータに関して、全体的なラグランジュ・コスト関数が最小化されるモードπ*を判断することと、
を含む、列挙されている例示の実施形態156のシステム。
第1のラグランジュ乗数に関連するマクロブロックに関して、局所情報を計算することと、
計算された局所情報および符号化パラメータに少なくとも部分的に基づいて、第1のラグランジュ乗数を判断することと、
を含む動作を処理するよう動作可能である、列挙されている例示の実施形態162のシステム。
エリアに関して複数の分散を計算することと、
複数の量子化パラメータ(QP)に関して複数のラグランジュ乗数を推定することと、
K個のビンにより複数の分散を(K+1)グループに配置することと、
L個のビンにより複数グループに複数のQPを配置することと、
K個およびL個のビンに少なくとも部分的に基づいて、グループそれぞれに関して平均ラグランジュ乗数を計算することと、
平均ラグランジュ乗数を、該1つ以上の構成要素内のラグランジュ乗数ルックアップ・テーブル内に記録することと、
を含む、列挙されている例示の実施形態162のシステム。
大域情報を計算することと、
計算された大域情報および符号化パラメータに少なくとも部分的に基づいて第1のラグランジュ乗数を判断することと、
をさらに含む第1のラグランジュ乗数に関する動作を処理するよう動作可能である、列挙されている例示の実施形態168のシステム。
階層レベル、グループ・オブ・ピクチャ(GOP)のピクチャ間の変化のステップ・サイズ、およびGOPのアンカー・ピクチャの関数として第1のラグランジュ乗数λkをセットすることであって、kは階層レベルを表し、ΔGOPはGOPのピクチャ間の変化のステップ・サイズを表し、λanchorはGOPのアンカー・ピクチャを表し、λk=(1−k・ΔGOP)・λanchorである、該セットすることと、
第1のラグランジュ乗数を計算することと、
を含む動作により判断するよう構成されている、列挙されている例示の実施形態173のシステム。
アンカー・ピクチャのラグランジュ乗数、およびアンカー・ピクチャの距離とGOP内の距離との比の関数として第1のラグランジュ乗数λkをセットすることであって、kは階層レベルを表し、λanchorはGOPのアンカー・ピクチャのラグランジュ乗数を表し、danchorはアンカー・ピクチャの距離を表し、dGOPはGOP内の距離を表し、λk=(danchor/dGOP)・λanchorとである、該セットすることと、
第1のラグランジュ乗数を計算することと、
を含む動作により判断するよう構成されている、列挙されている例示の実施形態173のシステム。
ビデオ・エンコーダのラグランジュ乗数推定モジュールにより第1のラグランジュ乗数を推定すること、および
第2のラグランジュ乗数を第1のラグランジュ乗数により置き換えること
によって、第2のラグランジュ乗数を更新するよう構成されている、列挙されている例示の実施形態133のシステム。
複数のラグランジュ乗数に関して、ラグランジュ乗数のスライディング・ウィンドウ用にラグランジュ乗数のサブセットを選択し、
スライディング・ウィンドウの平均の関数として第2のラグランジュ乗数を更新するよう構成されている、列挙されている例示の実施形態185のシステム。
ビデオ・エンコーダにより少なくとも2つのマクロブロックの分散を計算することと、
2つの隣り合ったマクロブック間の分散の変化が閾値を上回れば、第2のラグランジュ乗数を更新することと、
を含む動作により更新するよう構成されている、列挙されている例示の実施形態187のシステム。
ビデオ・エンコーダにより第1のグループのラグランジュ乗数を判断することと、
第1のグループのラグランジュ乗数により第2のグループのラグランジュ乗数を更新することと、
を含む動作の命令を処理するよう構成されている、列挙されている例示の実施形態133のシステム。
Claims (19)
- ビデオエンコーダが行う、ビデオ情報をコード化する方法であって、
第1のラグランジュ乗数を決定するステップと、前記第1のラグランジュ乗数を決定するステップは、少なくとも大域情報を使用することによって前記第1のラグランジュ乗数を推定するステップを含み、前記大域情報は、フレーム・レート又は現在のグループ・オブ・ピクチャ(GOP)内の階層レベルを含み、
第2のラグランジュ乗数を初期化するステップと、
前記第1のラグランジュ乗数により前記第2のラグランジュ乗数を更新するステップとを含み、前記更新された第2のラグランジュ乗数は、前記第1のラグランジュ乗数と、現在の前記第2のラグランジュ乗数との関数であり、
前記ビデオ・エンコーダは、前記更新された第2のラグランジュ乗数に従ってビデオ情報をコード化し、
前記第1のラグランジュ乗数は、符号化パラメータにおける歪値及びレート値に関して、前記符号化パラメータに隣接する符号化パラメータにおけるレート値及び歪値を更に使用して推定され、
各符号化パラメータは、1つ以上の量子化パラメータ(QP)、1つ以上のフレーム・レート、1つ以上の解像度、1つ以上の符号化レイヤ、1つ以上のQPの関数、1つ以上のフレーム・レートの関数、1つ以上の解像度の関数、又は1つ以上の符号化レイヤの関数のうちの任意の組み合わせを含み、
前記レート及び歪値は、複数のQPポイントを含み、
前記複数のQPポイントの前記歪及びレート値は、(D QP+l ,R QP+l )を含み、D QP+l は、QP+lにおける歪値を表し、R QP+l は、QP+lにおけるレート値を表し、
l、M及びNは、前記QPポイントの数値を表し、lは、−M,・・・,−1,1,・・・Nを含み、M及びNは、事前選択又は適応的選択され、
前記事前選択は、利用可能な計算資源に少なくとも部分的に基づき、
前記適応的選択は、利用可能な計算資源、又はビデオ・シーケンス特性、又は領域特性に少なくとも部分的に基づき、
前記領域特性は、1つ以上のマクロブロックの特性を含み、
前記符号化パラメータにおける前記歪値及び前記レート値に関して、前記符号化パラメータに隣接する符号化パラメータにおけるレート値及び歪値を使用して前記第1のラグランジュ乗数を推定することは、各QPポイントに関して、
全体的なラグランジュ・コスト関数が最小化されるモードを決定するステップと、
前記1階微分推定法は、前記(D QP, R QP )における階差の幾何平均を含む、方法。 - 前記符号化パラメータにおける前記歪値及び前記レート値に関して、前記符号化パラメータに隣接する符号化パラメータにおけるレート値及び歪値を使用して前記第1のラグランジュ乗数を推定することは、λestimateとして推定される前記第1のラグランジュ乗数を含み、
- 推定される前記第1のラグランジュ乗数は、前記歪及びレート値を決定するための、1つ以上の候補モードに関する複数のラグランジュ・コストの比較を含む、
請求項2記載の方法。 - 前記方法は、各QPポイントに関して、全体的なラグランジュ・コスト関数が最小化されるモードを探索するステップを更に含む、
請求項1記載の方法。 - 前記第1のラグランジュ乗数を推定するために大域情報を使用する場合、前記第1のラグランジュ乗数を決定するステップは、λestimateを算出するステップを含み、λestimateは、大域情報Iglobalに関する大域推定法fglobal(・)の関数であり、λestimate=fglobal(Iglobal)である、
請求項1記載の方法。 - 前記第1のラグランジュ乗数を推定するために大域情報を使用する場合、前記第1のラグランジュ乗数を決定するステップは、
前記大域情報を計算するステップと、
前記計算された大域情報及び符号化パラメータに少なくとも部分的に基づいて、前記第1のラグランジュ乗数を判断するステップと、
をさらに含み、
前記第1のラグランジュ乗数を、前記計算された大域情報及び前記符号化パラメータに少なくとも部分的に基づいて決定するステップは、時間的特性、シーケンス、又はピクチャ間若しくは領域間の符号化の差に少なくとも部分的に基づいて前記第1のラグランジュ乗数を調整するステップを含む、
請求項1記載の方法。 - 前記第1のラグランジュ乗数を推定するために大域情報を使用する場合、前記方法は、符号化パラメータと、ピクチャの階層レベルとの関数を含む前記第1のラグランジュ乗数を決定するステップを含み、前記第1のラグランジュ乗数はλkである、
請求項1記載の方法。 - 前記第1のラグランジュ乗数を決定するステップは、
A)階層レベル、グループ・オブ・ピクチャ(GOP)のピクチャ間の変化のステップ・サイズ、及び前記GOPのアンカー・ピクチャの関数として前記第1のラグランジュ乗数λkをセットするステップであって、kは前記階層レベルを表し、ΔGOPは前記GOPのピクチャ間の変化の前記ステップ・サイズを表し、λanchorは前記GOPの前記アンカー・ピクチャを表し、λk=(1−k・ΔGOP)・λanchorであるステップ、並びに前記第1のラグランジュ乗数を計算するステップ、又は、
B)アンカー・ピクチャの前記ラグランジュ乗数、及び前記アンカー・ピクチャの距離と前記GOP内の距離との比の関数として前記第1のラグランジュ乗数λkをセットするステップであって、kは前記階層レベルを表し、λanchorは前記GOPのアンカー・ピクチャの前記ラグランジュ乗数を表し、danchorは前記アンカー・ピクチャの前記距離を表し、dGOPは前記GOP内の前記距離を表し、λk=(danchor/dGOP)・λanchorであるステップ、並びに前記第1のラグランジュ乗数を計算するステップ、
のうちの少なくとも1つを更に含む、
請求項7記載の方法。 - 前記第1のラグランジュ乗数を決定するステップは、
アンカー・ピクチャまでの距離に少なくとも部分的に基づいて、グループ・オブ・ピクチャ(GOP)の1つ以上のピクチャに関してラグランジュ乗数を決定するステップ、又は
前記第1のラグランジュ乗数を、ラグランジュ乗数ルックアップ・テーブルから決定するステップであって、前記ラグランジュ乗数ルックアップ・テーブルは、複数の符号化パラメータに少なくとも部分的に基づいており、前記第1のラグランジュ乗数は、前記ラグランジュ乗数ルックアップ・テーブル内の複数のラグランジュ乗数に少なくとも部分的に基づいて更新されるステップ、又は
グループ・オブ・ピクチャ(GOP)の以前の階層構造を、前記GOPの後の階層構造により変換する関数
のうちの少なくとも1つをさらに含む、
請求項7記載の方法。 - 前記第2のラグランジュ乗数を更新するステップは、
前記第1のラグランジュ乗数λestimateと、前記第2のラグランジュ乗数λcurrentとの前記関数として、前記更新された第2のラグランジュ乗数λnewを計算するステップを含み、
λnew=λcurrent+Δ・(λestimate−λcurrent)であり、前記Δは、プリセットされる値、又は適応的に変更される値を含み、0<Δ<1である、
請求項1記載の方法。 - 前記第2のラグランジュ乗数を更新するステップは、
前記第2のラグランジュ乗数の更新に対し上限又は下限をセットすることによって、前記第2のラグランジュ乗数の更新の大きさに対し限度を設けるステップを含む、
請求項1記載の方法。 - 前記第2のラグランジュ乗数を更新するステップは、
1つ以上の以前のマクロブロック及び現在のマクロブロックにおける複数のラグランジュ乗数のスライディング・ウィンドウ平均を計算するステップと、
前記複数のラグランジュ乗数に関して、ラグランジュ乗数のスライディング・ウィンドウ用に前記ラグランジュ乗数のサブセットを選択するステップと、
前記スライディング・ウィンドウの平均の関数として前記第2のラグランジュ乗数を更新するステップと、
を含む請求項1記載の方法。 - 前記第2のラグランジュ乗数は、前記第1のラグランジュ乗数により周期的に更新され、当該方法は、
局所コンテキストに依存する周期であって、前記局所コンテキストは、動き強度又はシーン・カット情報を含む周期、
スライスの始まりで更新される前記第2のラグランジュ乗数を提供するステップ、
シーン・カットが検出されたときに更新される前記第2のラグランジュ乗数を提供するステップ、
前記ビデオ・エンコーダにより少なくとも2つのマクロブロックの分散を計算し、2つの隣り合ったマクロブロック間の前記分散の変化が閾値を上回れば、前記第2のラグランジュ乗数を更新するステップ、
幾つかの周期、ピクチャ、又はピクチャの領域に関して前記第2のラグランジュ乗数を更新するステップ、又は
無作為の順序又は一定順序で、前記第2のラグランジュ乗数の種々のタイプの更新を実行するステップであって、前記種々のタイプの更新は、直接更新、ステップ・サイズ更新、及びスライディング・ウィンドウ更新を含むステップ、
を更に含む、
請求項1記載の方法。 - 当該方法は、
前記ビデオ・エンコーダにより第1のグループのラグランジュ乗数を決定するステップと、
前記第1のグループのラグランジュ乗数により第2のグループのラグランジュ乗数を更新するステップと、
を更に含み、
前記第1のグループのラグランジュ乗数を決定するステップにおいて、複数の歪制約が採用され、
前記第1のグループのラグランジュ乗数を決定するステップは、2つ以上の次元及び1つ以上の符号化パラメータによりレート歪傾きを計算するステップを含む、
請求項1記載の方法。 - ビデオ情報のエンコーダであって、
少なくとも1つのプロセッサと、
前記少なくとも1つのプロセッサによって実行されると、請求項1乃至14のうちの1つ以上に記載の方法を前記少なくとも1つのプロセッサに実行させる命令を含む、コンピュータ読み取り可能な記録媒体と、
を含むエンコーダ。 - ビデオ情報を符号化する装置であって、
少なくとも1つのプロセッサと、
前記少なくとも1つのプロセッサによって実行されると、請求項1乃至14のうちの1つ以上に記載のプロセスを前記プロセッサに少なくとも部分的に実行させる命令を含む、コンピュータ読み取り可能な記録媒体と、
を含む装置。 - 請求項1に従って、ビデオ・エンコーダにより第1のラグランジュ乗数を決定する手段と、
請求項1に従って、前記第1のラグランジュ乗数により第2のラグランジュ乗数を更新する手段と、
を含むシステムであって、
当該システムは、請求項1に従って、前記第1のラグランジュ乗数又は前記第2のラグランジュ乗数のうちの1つ以上によりビデオ情報をコード化するよう構成されている、システム。 - 請求項2乃至14のうちの1つ以上に記載の方法を少なくとも部分的に実行する手段をさらに含む、
請求項17記載のシステム。 - コンピュータ・システムの少なくとも1つのプロセッサにより実行すると、請求項1乃至14のうちの1つ以上に記載の方法を前記プロセッサに少なくとも部分的に実行させる命令を含む、コンピュータ読み取り可能な記録媒体。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US9726908P | 2008-09-16 | 2008-09-16 | |
| US61/097,269 | 2008-09-16 | ||
| PCT/US2009/057117 WO2010033565A1 (en) | 2008-09-16 | 2009-09-16 | Adaptive video encoder control |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012503367A JP2012503367A (ja) | 2012-02-02 |
| JP5159955B2 true JP5159955B2 (ja) | 2013-03-13 |
Family
ID=41625232
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011527060A Expired - Fee Related JP5159955B2 (ja) | 2008-09-16 | 2009-09-16 | 適応的ビデオ・エンコーダ制御 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US8654835B2 (ja) |
| EP (1) | EP2338282A1 (ja) |
| JP (1) | JP5159955B2 (ja) |
| KR (1) | KR101271512B1 (ja) |
| CN (1) | CN102165772B (ja) |
| WO (1) | WO2010033565A1 (ja) |
Families Citing this family (51)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20120020415A1 (en) * | 2008-01-18 | 2012-01-26 | Hua Yang | Method for assessing perceptual quality |
| US20110064129A1 (en) * | 2009-09-16 | 2011-03-17 | Broadcom Corporation | Video capture and generation at variable frame rates |
| JP5964755B2 (ja) * | 2009-12-31 | 2016-08-03 | トムソン ライセンシングThomson Licensing | ビデオ符号化および復号化用の適応型結合前処理および後処理フィルタのための方法および装置 |
| JP5441812B2 (ja) * | 2010-05-12 | 2014-03-12 | キヤノン株式会社 | 動画像符号化装置、及びその制御方法 |
| US8513569B2 (en) | 2010-07-06 | 2013-08-20 | Nelson Stud Welding, Inc. | Arc energy regulation in drawn arc fastener welding process |
| US20130194386A1 (en) * | 2010-10-12 | 2013-08-01 | Dolby Laboratories Licensing Corporation | Joint Layer Optimization for a Frame-Compatible Video Delivery |
| US9066097B2 (en) * | 2011-02-01 | 2015-06-23 | Sony Corporation | Method to optimize the transforms and/or predictions in a video codec |
| WO2012122421A1 (en) * | 2011-03-10 | 2012-09-13 | Dolby Laboratories Licensing Corporation | Joint rate distortion optimization for bitdepth color format scalable video coding |
| CA2839345A1 (en) * | 2011-06-14 | 2012-12-20 | Zhou Wang | Method and system for structural similarity based rate-distortion optimization for perceptual video coding |
| TWI685249B (zh) * | 2011-12-21 | 2020-02-11 | 日商Jvc建伍股份有限公司 | 動態影像編碼裝置、動態影像編碼方法、及儲存有動態影像編碼程式之記錄媒體 |
| JP5988577B2 (ja) * | 2011-12-28 | 2016-09-07 | キヤノン株式会社 | 画像符号化装置、画像符号化方法及びプログラム |
| EP2803190B1 (en) | 2012-01-09 | 2017-10-25 | Dolby Laboratories Licensing Corporation | Hybrid reference picture reconstruction method for multiple layered video coding systems |
| WO2013142067A1 (en) | 2012-03-21 | 2013-09-26 | Dolby Laboratories Licensing Corporation | Systems and methods for iso-perceptible power reduction for displays |
| EP2859729B1 (en) * | 2012-06-12 | 2020-09-16 | Coherent Logix, Incorporated | A distributed architecture for encoding and delivering video content |
| CN102821281B (zh) * | 2012-08-21 | 2015-07-22 | 深圳广晟信源技术有限公司 | 一种率失真优化方法 |
| US10230956B2 (en) | 2012-09-26 | 2019-03-12 | Integrated Device Technology, Inc. | Apparatuses and methods for optimizing rate-distortion of syntax elements |
| US10277907B2 (en) | 2012-10-25 | 2019-04-30 | Integrated Device Technology, Inc. | Rate-distortion optimizers and optimization techniques including joint optimization of multiple color components |
| CN104885453B (zh) * | 2012-11-29 | 2018-11-02 | Lg 电子株式会社 | 支持多个层的用于编码/解码图像的方法和设备 |
| US9615089B2 (en) | 2012-12-26 | 2017-04-04 | Samsung Electronics Co., Ltd. | Method of encoding and decoding multiview video sequence based on adaptive compensation of local illumination mismatch in inter-frame prediction |
| CN103079068A (zh) * | 2013-01-14 | 2013-05-01 | 天津大学 | 基于运动剧烈程度和空域相关性的帧间模式判决方法 |
| CN103167290B (zh) * | 2013-04-01 | 2016-05-11 | 深圳市云宙多媒体技术有限公司 | 一种视频编码运动强度量化方法及装置 |
| CN103313058B (zh) * | 2013-06-08 | 2016-08-17 | 中国计量学院 | 针对芯片实现的hevc视频编码多模块优化方法和系统 |
| US9578342B2 (en) * | 2013-06-24 | 2017-02-21 | Dialogic Corporation | Rate control algorithm for scalable video encoding with disposable P-frames |
| KR102114252B1 (ko) | 2013-07-05 | 2020-05-22 | 삼성전자 주식회사 | 영상을 부호화하기 위한 영상 예측 모드 결정 방법 및 장치 |
| US20150085922A1 (en) * | 2013-09-25 | 2015-03-26 | Magnum Semiconductor, Inc. | Apparatuses and methods for reducing rate and distortion costs during encoding by modulating a lagrangian parameter |
| CN103533369B (zh) * | 2013-10-24 | 2016-10-26 | 东南大学 | 一种可分级视频编码空间增强层的快速模式选择方法 |
| US9866853B2 (en) * | 2014-04-15 | 2018-01-09 | Qualcomm Incorporated | System and method for lagrangian parameter calculation for display stream compression (DSC) |
| US20150373326A1 (en) * | 2014-06-19 | 2015-12-24 | Magnum Semiconductor, Inc. | Apparatuses and methods for parameter selection during rate-distortion optimization |
| US20160044340A1 (en) * | 2014-08-07 | 2016-02-11 | PathPartner Technology Consulting Pvt. Ltd. | Method and System for Real-Time Video Encoding Using Pre-Analysis Based Preliminary Mode Decision |
| WO2016022982A1 (en) | 2014-08-08 | 2016-02-11 | University Of Florida Research Foundation, Inc. | Joint fountain coding and network coding for loss-tolerant information spreading |
| US10136133B2 (en) * | 2014-11-11 | 2018-11-20 | Dolby Laboratories Licensing Corporation | Rate control adaptation for high-dynamic range images |
| CN107005699B (zh) * | 2015-01-16 | 2021-03-12 | 英特尔公司 | 采用成本估计的编码器分片大小控制 |
| US9942552B2 (en) * | 2015-06-12 | 2018-04-10 | Intel Corporation | Low bitrate video coding |
| US9883183B2 (en) * | 2015-11-23 | 2018-01-30 | Qualcomm Incorporated | Determining neighborhood video attribute values for video data |
| CN105516720B (zh) * | 2015-12-23 | 2019-01-29 | 天地伟业技术有限公司 | 一种监控摄像机码流的自适应控制方法 |
| WO2017161124A1 (en) * | 2016-03-16 | 2017-09-21 | University Of Florida Research Foundation, Incorporated | System for video streaming using delay-aware fountain codes |
| WO2017161122A1 (en) * | 2016-03-16 | 2017-09-21 | University Of Florida Research Foundation, Incorporated | System for live video streaming using delay-aware fountain codes |
| TWI593273B (zh) * | 2016-04-07 | 2017-07-21 | 晨星半導體股份有限公司 | 位元率控制方法及視訊編碼裝置 |
| CN107371027A (zh) * | 2016-05-11 | 2017-11-21 | 晨星半导体股份有限公司 | 比特率控制方法及视频编码装置 |
| AU2018254591B2 (en) * | 2017-04-21 | 2021-01-07 | Zenimax Media Inc. | Systems and methods for encoder-guided adaptive-quality rendering |
| CN109246407B (zh) * | 2017-04-28 | 2020-09-25 | 微软技术许可有限责任公司 | 图像编码 |
| US10999576B2 (en) * | 2017-05-03 | 2021-05-04 | Novatek Microelectronics Corp. | Video processing method |
| US10455250B2 (en) * | 2017-05-30 | 2019-10-22 | Mitsubishi Electric Research Laboratories, Inc. | Method and system for distributed coding of images |
| US10469854B2 (en) * | 2017-06-21 | 2019-11-05 | Intel Corporation | Content, psychovisual, region of interest, and persistence based adaptive quantization for video coding |
| US10880573B2 (en) | 2017-08-15 | 2020-12-29 | Google Llc | Dynamic motion vector referencing for video coding |
| US10284869B2 (en) | 2017-09-28 | 2019-05-07 | Google Llc | Constrained motion field estimation for hardware efficiency |
| US10664477B2 (en) * | 2017-12-21 | 2020-05-26 | Futurewei Technologies, Inc. | Cardinality estimation in databases |
| CN108769682B (zh) * | 2018-06-20 | 2022-08-16 | 腾讯科技(深圳)有限公司 | 视频编码、解码方法、装置、计算机设备和存储介质 |
| US11363306B2 (en) * | 2019-04-05 | 2022-06-14 | Comcast Cable Communications, Llc | Methods, systems, and apparatuses for processing video by adaptive rate distortion optimization |
| US11895330B2 (en) * | 2021-01-25 | 2024-02-06 | Lemon Inc. | Neural network-based video compression with bit allocation |
| CN114915789B (zh) * | 2022-04-13 | 2023-03-14 | 中南大学 | 一种帧间的拉格朗日乘子优化方法、系统、设备及介质 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1157080A (zh) * | 1995-04-25 | 1997-08-13 | 菲利浦电子有限公司 | 用于编码视频图像的装置和方法 |
| US5778192A (en) | 1995-10-26 | 1998-07-07 | Motorola, Inc. | Method and device for optimal bit allocation between different sources of information in digital video compression |
| US6167162A (en) | 1998-10-23 | 2000-12-26 | Lucent Technologies Inc. | Rate-distortion optimized coding mode selection for video coders |
| US7280700B2 (en) | 2002-07-05 | 2007-10-09 | Microsoft Corporation | Optimization techniques for data compression |
| US7194035B2 (en) * | 2003-01-08 | 2007-03-20 | Apple Computer, Inc. | Method and apparatus for improved coding mode selection |
| WO2005022923A2 (en) * | 2003-08-26 | 2005-03-10 | Thomson Licensing S.A. | Method and apparatus for minimizing number of reference pictures used for inter-coding |
| EP1575299A1 (en) * | 2004-03-12 | 2005-09-14 | Thomson Licensing S.A. | Motion-compensated spatio-temporal wavelet compression of video data with optimised permutation of the frames |
| US20090225829A2 (en) * | 2005-07-06 | 2009-09-10 | Do-Kyoung Kwon | Method and apparatus for operational frame-layerrate control in video encoder |
| KR100727972B1 (ko) | 2005-09-06 | 2007-06-14 | 삼성전자주식회사 | 영상의 인트라 예측 부호화, 복호화 방법 및 장치 |
| US8326068B1 (en) * | 2006-08-30 | 2012-12-04 | Maxim Integrated Products, Inc. | Method and apparatus for modeling quantization matrices for image/video encoding |
| US8594187B2 (en) * | 2007-03-02 | 2013-11-26 | Qualcomm Incorporated | Efficient video block mode changes in second pass video coding |
| US20080232468A1 (en) * | 2007-03-21 | 2008-09-25 | Mediatek Inc. | Method and apparatus for adaptive gop structure determination |
| US9445110B2 (en) * | 2007-09-28 | 2016-09-13 | Dolby Laboratories Licensing Corporation | Video compression and transmission techniques |
-
2009
- 2009-09-16 WO PCT/US2009/057117 patent/WO2010033565A1/en active Application Filing
- 2009-09-16 CN CN2009801360730A patent/CN102165772B/zh not_active Expired - Fee Related
- 2009-09-16 JP JP2011527060A patent/JP5159955B2/ja not_active Expired - Fee Related
- 2009-09-16 KR KR1020117008731A patent/KR101271512B1/ko not_active IP Right Cessation
- 2009-09-16 US US13/063,768 patent/US8654835B2/en not_active Expired - Fee Related
- 2009-09-16 EP EP09792597A patent/EP2338282A1/en not_active Withdrawn
Also Published As
| Publication number | Publication date |
|---|---|
| CN102165772B (zh) | 2013-07-24 |
| EP2338282A1 (en) | 2011-06-29 |
| KR20110056326A (ko) | 2011-05-26 |
| US8654835B2 (en) | 2014-02-18 |
| KR101271512B1 (ko) | 2013-06-05 |
| JP2012503367A (ja) | 2012-02-02 |
| CN102165772A (zh) | 2011-08-24 |
| US20110170591A1 (en) | 2011-07-14 |
| WO2010033565A1 (en) | 2010-03-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5159955B2 (ja) | 適応的ビデオ・エンコーダ制御 | |
| US20220191493A1 (en) | Video compression and transmission techniques | |
| US9479786B2 (en) | Complexity allocation for video and image coding applications | |
| KR101744654B1 (ko) | 모션 기반 동적 해상도 다중 비트 레이트 비디오 인코딩 | |
| JP5253571B2 (ja) | 複数の歪抑制下のビデオ圧縮 | |
| TWI399097B (zh) | 用於編碼視訊之系統及方法,以及電腦可讀取媒體 | |
| KR100932879B1 (ko) | 매크로블록 레벨 레이트 제어 | |
| JP2017532858A (ja) | モデルベースの映像符号化用の知覚的最適化 | |
| JP2006180497A (ja) | 画像又は画像シーケンスを符号化するために使用される量子化マトリクスを生成するための方法及び装置 | |
| KR20140042845A (ko) | 지각적 비디오 코딩을 위한 구조적 유사성 기반의 레이트-왜곡 최적화 방법 및 시스템 | |
| EP2027727A1 (en) | Method and apparatus for adaptively determining a bit budget for encoding video pictures | |
| JP2000506687A (ja) | 知覚量を用いて符号化を最適化し自動操作可能な画像圧縮を実行する装置及び方法 | |
| KR20200002036A (ko) | 비디오 코딩에서 모션 보상 예측을 위한 광흐름 추정 | |
| WO2019104635A1 (en) | System and method for controlling video coding at frame level | |
| WO2019104862A1 (en) | System and method for reducing video coding fluctuation | |
| WO2019104611A1 (en) | System and method for controlling video coding within image frame | |
| JP2005086249A (ja) | 動画像符号化方法および動画像符号化装置 | |
| Li et al. | An improved ROI-based rate control algorithm for H. 264/AVC | |
| JP4243286B2 (ja) | 符号化方法 | |
| KR20090037288A (ko) | 동영상 부호화 데이터율 제어를 위한 실시간 장면 전환검출 방법, 이를 이용한 영상통화 품질 향상 방법, 및영상통화 시스템 | |
| Wang et al. | Motion estimation and mode decision for low-complexity h. 264 decoder | |
| Li et al. | Analysis of the H. 264 advanced video coding standard and an associated rate control scheme |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120717 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121016 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121120 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121211 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151221 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |