JP5125875B2 - PID controller tuning apparatus, PID controller tuning program, and PID controller tuning method - Google Patents
PID controller tuning apparatus, PID controller tuning program, and PID controller tuning method Download PDFInfo
- Publication number
- JP5125875B2 JP5125875B2 JP2008211647A JP2008211647A JP5125875B2 JP 5125875 B2 JP5125875 B2 JP 5125875B2 JP 2008211647 A JP2008211647 A JP 2008211647A JP 2008211647 A JP2008211647 A JP 2008211647A JP 5125875 B2 JP5125875 B2 JP 5125875B2
- Authority
- JP
- Japan
- Prior art keywords
- controller
- model
- control
- parameter
- value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images












Landscapes
- Feedback Control In General (AREA)
Description
本発明は、PID(proportional-integral-derivative)コントローラのチューニングに関し、特に、PIDコントローラのチューニング不良により操業データが周期振動しているようなシステムに対し、適切なPIDパラメータを与えることにより当該チューニング不良を解消し、制御性を向上するための、PIDコントローラのチューニング装置、PIDコントローラのチューニング用プログラムおよびPIDコントローラのチューニング方法に関する。 The present invention relates to tuning of a PID (proportional-integral-derivative) controller, and in particular, by providing an appropriate PID parameter to a system in which operation data is periodically oscillating due to a poor tuning of the PID controller, the tuning failure is provided. The present invention relates to a tuning apparatus for a PID controller, a tuning program for a PID controller, and a tuning method for a PID controller.
従来から、プロセスのコントローラでのPID制御に対するチューニング方法に関し、多数の技術が開示されている。たとえば、特許文献1では、プラントに同定用信号を与えることなくプロセスを同定し、同定したプロセスモデルとPIDコントローラのモデルを用いたシミュレーションを行うことによって、その結果を評価し、最適なPIDパラメータを取得する技術が開示されている。
なお、プロセスの制御に際し、プロセスの特性や外乱の大きさによってその制御特性が変動すると考えられる。そして、プラントにおけるプロセスの制御についての精度の向上は、常に求められていることである。 In the process control, it is considered that the control characteristics vary depending on the process characteristics and the magnitude of the disturbance. And the improvement of the precision about the control of the process in a plant is always calculated | required.
本発明は係る実情に鑑み考え出されたものであり、その目的は、プロセスをコントローラで制御するシステムにおいて、精度良くプロセスを制御できるPIDコントローラのチューニング装置、PIDコントローラのチューニング用プログラムおよびPIDコントローラのチューニング方法を提供することである。 The present invention has been devised in view of such circumstances, and its purpose is to provide a PID controller tuning apparatus, a PID controller tuning program, and a PID controller that can accurately control a process in a system in which the process is controlled by a controller. It is to provide a tuning method.
本発明のPIDコントローラのチューニング装置は、プロセスをPID(proportional-integral-derivative)制御するコントローラをチューニングする装置であって、前記プロセスの操業データを取得して記憶する記憶手段と、前記プロセスの操業データに基づいて、前記コントローラの制御性を評価する評価手段と、前記評価手段によって制御性が低いと評価されたことを条件として、前記取得した操業データを使って、コントローラのモデルに対する制御パラメータと、一定の制限に基づくプロセスのモデルに対するプロセスパラメータとを同定する同定手段と、前記同定手段が同定した前記制御パラメータおよび前記プロセスパラメータに基づく前記コントローラのモデルと前記プロセスのモデルを用いて、前記プロセスの制御応答のシミュレーションを実行するシミュレーション手段とを備えることを特徴とする。 A tuning device for a PID controller according to the present invention is a device for tuning a controller that controls a process for PID (proportional-integral-derivative), and includes a storage means for acquiring and storing operation data of the process, and an operation of the process. Based on the data, the evaluation means for evaluating the controllability of the controller, and on the condition that the controllability is evaluated to be low by the evaluation means, using the acquired operation data, control parameters for the controller model, An identification means for identifying a process parameter for a model of the process based on a certain limit, the control parameter identified by the identification means, the controller model based on the process parameter, and the process model. Control response simulation Characterized in that it comprises a simulation means for executing Deployment.
また、本発明のPIDコントローラのチューニング装置では、前記同定手段は、前記一定の制限として、前記プロセスのモデルを、むだ時間と積分系を含む二次遅れ系の動的モデルとし、前記操業データとして、周期振動をしているデータを使ってパラメータを同定することが好ましい。 In the PID controller tuning device according to the present invention, the identification unit may use the process model as a dynamic model of a second-order lag system including a dead time and an integration system as the fixed restriction, and the operation data as the operation data. It is preferable to identify the parameter using data that is periodically oscillated.
また、本発明のPIDコントローラのチューニング装置では、前記同定手段は、遺伝的アルゴリズムに基づいて前記制御パラメータと前記プロセスパラメータを同定することが好ましい。 In the PID controller tuning device of the present invention, it is preferable that the identification unit identifies the control parameter and the process parameter based on a genetic algorithm.
また、本発明のPIDコントローラのチューニング装置は、前記同定手段で得た前記プロセスのモデルを用い、一般化最小分散制御に基づき、前記プロセスのモデルにおける制御量の分散とコントローラのモデルにおける操作量の分散とを評価し、その評価値が最小となる最適な制御パラメータを算出する算出手段をさらに備え、前記シミュレーション手段は、前記算出手段が算出した前記最適な制御パラメータに基づく前記コントローラのモデルと、前記同定手段が同定した前記プロセスパラメータに基づく前記プロセスのモデルとを用いて、前記シミュレーションを実行することが好ましい。 In addition, the PID controller tuning apparatus of the present invention uses the process model obtained by the identification unit, and based on generalized minimum variance control, distributes the control amount in the process model and the operation amount in the controller model. A calculation unit that evaluates the variance and calculates an optimal control parameter that minimizes the evaluation value, and the simulation unit includes a model of the controller based on the optimal control parameter calculated by the calculation unit; It is preferable to execute the simulation using a model of the process based on the process parameter identified by the identification unit.
また、本発明のPIDコントローラのチューニング装置は、前記算出手段が算出した最適な制御パラメータを変更する入力手段と、前記変更したパラメータに基づく前記コントローラのモデルおよび前記プロセスのモデルを用いて前記シミュレーションを実行する手段をさらに備えることが好ましい。 The tuning apparatus for a PID controller according to the present invention performs the simulation using an input unit that changes the optimal control parameter calculated by the calculation unit, a model of the controller based on the changed parameter, and a model of the process. It is preferable to further comprise means for executing.
本発明のPIDコントローラのチューニング用プログラムは、プロセスをPID(proportional-integral-derivative)制御するコントローラをチューニングするプログラムであって、コンピュータに、前記プロセスの操業データを取得して記憶するステップと、前記プロセスの操業データに基づいて、前記コントローラの制御性を評価するステップと、前記制御性が低いと評価されたことを条件として、前記取得した操業データを使って、コントローラのモデルに対する制御パラメータと、一定の制限に基づくプロセスのモデルに対するプロセスパラメータとを同定するステップと、前記同定するステップで得た前記プロセスのモデルを用い、一般化最小分散制御に基づいて、前記プロセスのモデルにおける制御量の分散とコントローラのモデルにおける操作量の分散とを評価し、その評価値が最小となる最適な制御パラメータを算出するステップと、前記同定したプロセスパラメータと前記同定した制御パラメータに基づいて、前記プロセスの制御応答のシミュレーションを実行するステップと、前記同定したプロセスパラメータと前記算出した最適な制御パラメータに基づいて、前記プロセスの制御応答のシミュレーションを実行するステップとを実行させることを特徴とする。 A tuning program for a PID controller according to the present invention is a program for tuning a controller that controls a process for PID (proportional-integral-derivative), the step of acquiring and storing operation data of the process in a computer, A step of evaluating the controllability of the controller based on operation data of the process, and on the condition that the controllability is evaluated to be low, using the acquired operation data, the control parameters for the controller model; Identifying a process parameter for a model of the process based on a certain limit; and using the model of the process obtained in the identifying step and distributing the control amount in the model of the process based on generalized minimum variance control And controller model And calculating the optimal control parameter that minimizes the evaluation value, and simulating the control response of the process based on the identified process parameter and the identified control parameter. And executing a simulation of a control response of the process based on the identified process parameter and the calculated optimum control parameter.
本発明のPIDコントローラのチューニング方法は、プロセスをPID(proportional-integral-derivative)制御するコントローラをチューニングする方法であって、前記プロセスの操業データを取得して記憶するステップと、前記プロセスの操業データに基づいて、前記コントローラの制御性を評価するステップと、前記制御性が低いと評価されたことを条件として、前記取得した操業データを使って、コントローラのモデルに対する制御パラメータと、一定の制限に基づくプロセスのモデルに対するプロセスパラメータとを同定するステップと、前記同定するステップで得た前記プロセスのモデルを用い、一般化最小分散制御に基づいて、前記プロセスのモデルにおける制御量の分散とコントローラのモデルにおける操作量の分散とを評価し、その評価値が最小となる最適な制御パラメータを算出するステップと、前記同定したプロセスパラメータと前記同定した制御パラメータに基づいて、前記プロセスの制御応答のシミュレーションを実行するステップと、前記同定したプロセスパラメータと前記算出した最適な制御パラメータに基づいて、前記プロセスの制御応答のシミュレーションを実行するステップとを備えることを特徴とする。 A tuning method for a PID controller according to the present invention is a method for tuning a controller for controlling a process by PID (proportional-integral-derivative), the step of acquiring and storing operation data of the process, and the operation data of the process. On the basis of the control parameters of the controller model using the acquired operation data on the condition that the controllability of the controller is evaluated and the controllability is evaluated to be low. Identifying a process parameter for a process model based on, and using a model of the process obtained in the identifying step, and based on generalized minimum variance control, the variance of the controlled variable in the process model and the controller model The variance of the operation amount in Calculating an optimal control parameter that minimizes an evaluation value; executing a simulation of a control response of the process based on the identified process parameter and the identified control parameter; and the identified process parameter And executing a simulation of a control response of the process based on the calculated optimal control parameter.
本発明によれば、プロセスの実際の操業データに基づいて、コントローラのモデルとプロセスのモデルの双方が同定され、シミュレーションが実行される。 According to the present invention, based on the actual operational data of the process, both the controller model and the process model are identified and a simulation is performed.
これにより、コントローラで制御されている閉ループシステムに対して、より精度良く同定することが可能になると考えられ、このことから、その制御特性をより正確に把握でき、チューニング不良を解消して制御性を向上させる最適なPIDパラメータを算出することが可能となる。 As a result, it is considered possible to identify the closed-loop system controlled by the controller with higher accuracy, and from this, the control characteristics can be grasped more accurately, tuning defects are eliminated, and controllability is improved. It is possible to calculate an optimal PID parameter that improves
また、本発明によれば、プロセスの操業データに基づいて、コントローラの制御性が評価され、制御性が低いと評価されたことを条件として、制御パラメータとプロセスパラメータの同定やシミュレーションが実行される。 Further, according to the present invention, control parameters and process parameters are identified and simulated on the condition that the controllability of the controller is evaluated and the controllability is evaluated based on the process operation data. .
これにより、制御パラメータやプロセスパラメータの同定等の処理が、必要なときにのみ実行されるため、チューニングのための処理が効率良く実行されることとなる。 As a result, processes such as identification of control parameters and process parameters are performed only when necessary, and therefore, the tuning process is efficiently performed.
[1.PIDコントローラのチューニング装置の構成]
本実施の形態のチューニング装置は、プラント内の単数または複数のコントローラを順
次チューニングするための装置である。図1に、当該チューニング装置のハードウェア構成を模式的に示す。
[1. Configuration of PID controller tuning device]
The tuning device of the present embodiment is a device for sequentially tuning one or more controllers in a plant. FIG. 1 schematically shows a hardware configuration of the tuning apparatus.
図1を参照して、チューニング装置100は、当該チューニング装置100の動作を全体的に制御するCPU(central processing unit)101を含む。また、チューニング装置100では、CPU101は、入出力装置(I/O)102を介して、他の要素との間で情報の送受信を行う。
Referring to FIG. 1,
CPU101は、I/O102を介して通信制御部109に接続され、当該通信制御部109を介して、他の装置やネットワークに接続する。そして、CPU101は、外部の装置やネットワーク上のサーバなどから、上記したようなプラントの操業データを取得する。
The
ハードディスク(HD)103には、CPU101が実行するプログラムを記憶するプログラム記憶部103A、および、上記のように取得した操業データを記憶する操業データ記憶部103Bを含む。また、HD103には、プログラム記憶部103Aに記憶されたプログラムをCPU101が実行する際に必要とされる定数や変数の値など、各種のデータが記憶されているものとする。CPU101は、I/O102を介して、HD103にアクセスする。
The hard disk (HD) 103 includes a
チューニング装置100には、CPU101のワークエリアとして機能するRAM(random access memory)105、キーボード等の外部からの情報の入力を受付ける入力部106、チューニング装置100に対して着脱可能な記録媒体104Aに対する情報の書込および読込を行うメディアドライブ104、ならびに、CPU101の処理内容等を表示する表示部108を含む。
The
CPU101は、HD103のプログラム記憶部103Aに記録されたプログラムを実行することもできるし、記録媒体104Aに記録されたプログラムを実行することもできる。また、チューニング装置100は、プログラム記憶部103Aに、記録媒体104Aに記録されたプログラムや通信制御部109を介して外部の記憶装置に格納されたプログラムをインストールすることもできるし、また、通信制御部109を介して他の機器に記録されているプログラムを読込んで実行することもできる。
The
[2.システム同定のコンセプト]
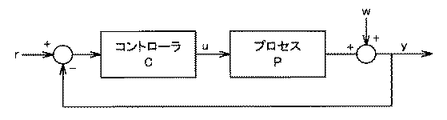
チューニング装置100は、図11にブロック線図を示すような閉ループシステムに対して、制御性を評価し、制御性が低いと評価されたものに対して、コントローラとプロセスの双方を同定する。そして、当該同定結果として得られるプロセスのモデルを用いて、コントローラがプロセスを制御する際のパラメータとして最適な制御パラメータを算出する。
[2. System identification concept]
The
なお、図11において、rは図11に示されたシステムに対する目標値を示し、uはプロセスPに対するコントローラCの操作量を示し、yはプロセスPの出力である制御量を示し、wは外乱を示している。 In FIG. 11, r indicates a target value for the system shown in FIG. 11, u indicates an operation amount of the controller C with respect to the process P, y indicates a control amount that is an output of the process P, and w indicates disturbance. Is shown.
図11に示したようなシステム(閉ループシステム)について、次の伝達関数表現で示した式(1)の関係が成り立つ。 For the system (closed loop system) as shown in FIG. 11, the relationship expressed by the following expression (1) is established.

式(1)において、C,Pは、それぞれコントローラ,プロセスを表わす伝達関数を示している。また、U(s),Y(s)は,それぞれ上記した操作量u(t)と制御量y(t)をラプラス変換したものである。 In Expression (1), C and P represent transfer functions representing a controller and a process, respectively. U (s) and Y (s) are Laplace transforms of the manipulated variable u (t) and the controlled variable y (t), respectively.
式(1)から実際のシステムにおけるコントローラとプロセスを同定しようとした場合、コントローラとプロセスの伝達関数(C,P)双方が未知で、かつ、コントローラとプロセスの伝達関数(C,P)が分離できないため、閉ループのシステム同定は困難とされてきた。 When trying to identify the controller and process in the actual system from equation (1), both the controller and process transfer functions (C, P) are unknown and the controller and process transfer functions (C, P) are separated. Because of this, closed-loop system identification has been considered difficult.
ここで、図2に、本実施の形態において設定された、システム同定のための仮想のシステム構成を模式的に示す。 Here, FIG. 2 schematically shows a virtual system configuration for system identification set in the present embodiment.
図2では、実際のプラントにおけるコントローラとプロセスは、それぞれコントローラ10,プロセス20として示されている。なお、本実施の形態では、これらのシステムと並列して、仮想のコントローラ51と仮想のプロセス52が定義されている。ここで、u′とy′は、それぞれ、仮想のシステムにおける操作量と制御量である。
In FIG. 2, the controller and process in the actual plant are shown as a
本実施の形態では、コントローラ10とプロセス20とから構成される実際のシステムの操業データを利用して、仮想のコントローラ51と仮想のプロセス52のモデル化を行う。
In the present embodiment, the
そして、このようにして得られたプロセス52のモデルを用いて、コントローラ51の最適な制御パラメータを算出し、その値を参考に、実際のコントローラ10のチューニングを行う。
Then, using the model of the
図3は、チューニング装置100の機能的な構成を模式的に示す図である。
図3を参照して、チューニング装置100では、仮想のコントローラ51と仮想のプロセス52に対して、パラメータ処理部54が、それぞれのモデルに用いられているパラメータの初期値の発生等の処理(後述する遺伝的アルゴリズムを用いたシステム同定における初期世代の固体の発生)を実行する。そして、適応度算出部53は、その時点のパラメータを用いてu′およびy′を算出し、これらの値が実際の操業データにおけるuおよびyとどの程度近いものであるかを示す値を算出する。
FIG. 3 is a diagram schematically illustrating a functional configuration of the
Referring to FIG. 3, in
パラメータ処理部54は、適応度算出部53による度合の算出が行われると、新たにコントローラ51とプロセス52のモデルについてのパラメータを発生する。適応度算出部53は、パラメータ処理部54によって新たなパラメータが提供されると、当該新たなパラメータに基づいて上記したような適応度を算出する。
When the
チューニング装置100では、パラメータ処理部54と適応度算出部53による上記のような処理を繰返すことによって、コントローラ51とプロセス52のそれぞれが実際のコントローラとプロセスに合致するようにパラメータを修正し、これにより、コントローラ10およびプロセス20を同定している。
In the
本実施の形態において、パラメータ処理部54は、後述するシステム同定処理(図5参照)において、初期設定処理(初期世代の個体の発生)、交差処理、および突然変異処理を実行するCPU101によって実現される。また、適応度算出部53は、当該システム同定処理において、選択処理を実行するCPU101によって実現される。
In the present embodiment, the
[3.PIDコントローラのチューニングのための処理]
図4は、チューニング装置100がコントローラ10のチューニングのために実行する処理のフローチャートである。
[3. Processing for tuning the PID controller]
FIG. 4 is a flowchart of processing executed by the
図4を参照して、チューニング装置100では、コントローラのチューニングのための処理として、CPU101は、まずステップS1で、コントローラ10とプロセス20を含むシステムの操業データを通信制御部109を介して取得し、操業データ記憶部103Bに記憶させる処理を実行して、ステップS1Aへ処理を進める。
Referring to FIG. 4, in tuning
ステップS1で取得される操業データの構成の一例を表1に示す。 An example of the structure of the operation data acquired in step S1 is shown in Table 1.
本実施の形態でチューニング装置100が取得する操業データには、所定の時間間隔(表1では、1分間隔)の、コントローラ10に関する目標値r、制御量y、操作量uの値が含まれる。
The operation data acquired by the
ステップS1Aでは、処理対象となっている制御ループの制御量について、制御性を評価する。本実施の形態では、制御性の評価は、たとえば、制御量の周期性の有無か、最小分散制御に基づく制御性評価指標の値によって判断される。 In step S1A, the controllability is evaluated for the control amount of the control loop to be processed. In the present embodiment, the controllability is evaluated based on, for example, the presence or absence of periodicity of the control amount or the value of the controllability evaluation index based on the minimum variance control.
周期性の有無の判断としては、たとえば、制御量のデータのパワースペクトルを計算し、ある一定の値(たとえば、15dB)を超えるピークが当該パワースペクトルにおいて存在する場合には、周期性があると判断する。ここで、パワースペクトルの計算について説明する。 As the determination of the presence or absence of periodicity, for example, the power spectrum of the control amount data is calculated, and if there is a peak exceeding a certain value (for example, 15 dB) in the power spectrum, there is periodicity. to decide. Here, calculation of the power spectrum will be described.
まず、制御量の時系列データ「x(t)」を、平均0、分散1となるように、次の式(A1)で規格化する。 First, the time series data “x (t)” of the control amount is normalized by the following equation (A1) so that the average becomes 0 and the variance becomes 1.
そして、規格化されたデータを、フーリエ変換し、次の式(A2)を使ってパワースペクトルを計算する。 Then, the normalized data is Fourier transformed, and the power spectrum is calculated using the following equation (A2).
制御量のデータのパワースペクトルにおける周期性の有無の判断態様は、周知の技術(たとえば、文献(久下本秀和、プラント運転データを活用したバルブ固着検出と制御性能改善、計装制御技術会議、日本、日本能率協会、2006年)を参照)を適用できるものとする。そして、周期性が有ると判断された場合には、制御性が低いと判断されることとなる。 The determination mode of the presence or absence of periodicity in the power spectrum of control amount data is based on well-known techniques (for example, literature (Hidekazu Kushitamoto, valve sticking detection and control performance improvement utilizing plant operation data, instrumentation control technology conference, Japan, Japan Management Association, 2006)). When it is determined that there is periodicity, it is determined that the controllability is low.
次に、最小分散制御に基づく制御性評価法による制御性の評価について説明する。
ここで、制御性評価指標とは、次の式(A3)に従って算出される制御性評価指標ηである。なお、式(A3)において、σMV 2は制御量の最小分散であり、σy 2は実際の制御量の分散であり、d−1は、制御ループにおけるむだ時間を表わしている。なお、ηは、0から1の値をとる。
Next, evaluation of controllability by the controllability evaluation method based on minimum variance control will be described.
Here, the controllability evaluation index is a controllability evaluation index η calculated according to the following equation (A3). In equation (A3), σ MV 2 is the minimum variance of the control amount, σ y 2 is the variance of the actual control amount, and d−1 represents the dead time in the control loop. Note that η takes a value from 0 to 1.
本実施の形態では、制御性評価指標ηの値が予め定められた閾値の値以上である場合には制御性が高いと判断され、当該閾値よりも小さい場合には制御性が低いと判断される。 In the present embodiment, when the value of the controllability evaluation index η is equal to or greater than a predetermined threshold value, it is determined that the controllability is high, and when the value is smaller than the threshold value, it is determined that the controllability is low. The
そして、CPU101は、ステップS1Aで制御性の評価を行なった後、ステップS1Bで、評価の結果、制御性が良好であるか否か、つまり、制御性が高いか否かを判断する。そして、CPU101は、制御性が高いと判断すると図4に示された処理を終了させ、低いと判断すると、ステップS2に処理を進める。
Then, after evaluating the controllability in step S1A, the
ステップS2では、CPU101は、仮想のコントローラ51と仮想のプロセス52で構成されるシステムのモデル化を行い、ステップS3へ処理を進める。ステップS2におけるシステム同定処理の詳細については、後述する。
In step S2, the
ステップS2でシステム同定処理を実行した後、CPU101は、ステップS3で、当該システム同定処理によって得られたプロセス52のモデルを用いて、コントローラ51の最適な制御パラメータを算出する処理(最適パラメータ算出処理)を実行して、ステップS4へ処理を進める。最適パラメータ算出処理の詳細は、後述する。
After executing the system identification process in step S2, the
ステップS4では、CPU101は、上記したシステム同定処理および最適パラメータ算出処理によって得られた情報に基づいて、コントローラ51とプロセス52を含むシステムについてのシミュレーションを実行し、ステップS5へ処理を進める。
In step S4, the
ステップS5では、CPU101は、上記したシステム同定処理や最適パラメータ算出処理の結果およびシミュレーションの結果を、表示部108に提示する処理(結果提示処理)を実行する。そこで、ユーザは、満足のいく結果が得られていなければ、コントローラ51の制御パラメータを手入力で修正し、再度シミュレーションを行うとともに、満足がいく結果が得られれば、その制御パラメータを参考に実際のコントローラ10の制御パラメータを変更して、チューニングのための処理を終了する。
In step S <b> 5, the
以上、図4を参照して説明した処理では、ステップS1Aにおいて評価した制御性が低い場合にのみ(ステップS1BでNO判断時)、ステップS2以降の処理が実行され、ステップS1Aにおいて評価した制御性が高い場合には(ステップS1BでYES判断時)、ステップS2以降の処理が実行されない。なお、ステップS2以降の処理は、制御性が高いと評価された場合でも実行されても良いし、また、ステップS1において操業データが取得された後、ステップS1A,1Bにおける制御性の評価に関する判断がなされることなく、直接ステップS2以降の処理が実行されても良い。 As described above, in the process described with reference to FIG. 4, only when the controllability evaluated in step S1A is low (when NO is determined in step S1B), the process after step S2 is executed, and the controllability evaluated in step S1A. Is high (when YES is determined in step S1B), the processing after step S2 is not executed. Note that the processing after step S2 may be executed even when it is evaluated that the controllability is high, and after the operation data is acquired in step S1, the judgment regarding the evaluation of controllability in steps S1A and 1B. The process after step S2 may be directly executed without being performed.
[4.システム同定]
4.1 プロセスモデル
上記したステップS2におけるシステム同定処理の前提として、本実施の形態では、プロセス52のモデルとして、CARIMA(Controlled Auto-Regressive and Integrated Moving-Average)モデルを採用している。CARIMAモデルを、式(2)に示す。
[4. System identification]
4.1 Process Model As a premise of the system identification process in step S <b> 2 described above, a CARIMA (Controlled Auto-Regressive and Integrated Moving-Average) model is adopted as a model of the
なお、式(2)において、yは制御量であり、uは操作量であり、dはむだ時間であり、wyは制御量yに関する外乱であり、そして、aおよびbはCARIMAモデルにおいて利用されているパラメータであり、Δは差分演算子を表している。 In equation (2), y is a controlled variable, u is a manipulated variable, d is a dead time, wy is a disturbance related to the controlled variable y, and a and b are used in the CARIMA model. And Δ represents a difference operator.
本実施の形態では、プロセス52のモデルとして、式(2)で示したCARIMAモデルについて、むだ時間を含む二次遅れ系までを考慮することとする。これにより、本実施の形態においてシステム同定に利用されるプロセス52のモデルは、式(3)として表わされる。
In the present embodiment, as the model of the
なお、式(3)において、yは制御量の操業データを示し、y′はプロセスモデルから算出される制御量の計算値を示し、uは操作量の操業データを示し、u′は後述するコントローラモデルから算出される操作量の計算値を示す。 In equation (3), y represents control amount operation data, y ′ represents a control amount calculation value calculated from the process model, u represents operation amount operation data, and u ′ will be described later. The calculation value of the operation amount calculated from the controller model is shown.
4.2 コントローラモデル
本実施の形態のチューニング装置100がチューニングの対象とするコントローラ(図11のブロック線図で示したコントローラ)は、PIDコントローラである。なお、本実施の形態では、PIDコントローラの一例としてI−PDコントローラ(比例先行型PID)をコントローラモデルとする。このようなコントローラのモデルは、以下の式(4)に示す式で表わされる。
4.2 Controller Model The controller (the controller shown in the block diagram of FIG. 11) to be tuned by the
ここで、yは図2のプロセス20の出力である制御量であり、uはコントローラ10のプロセス20に対する操作量であり、KcはPID制御の式で一般に用いられる比例ゲインであり、Tiは積分時間であり、Tdは微分時間であり、Tsはサンプリング周期(制御演算のためにデータを採集する周期)、Wuは操作量uに関する誤差である。
Here, y is a control amount that is an output of the
なお、上記したように、本実施の形態におけるシステムのモデル化に際して、プロセス20のプロセスモデルには積分を含む二次遅れ系を採用し、むだ時間も考慮している。これに基づき、本実施の形態におけるコントローラ51のモデルは、次の式(5)で表わされる。なお、式(5)では、dはむだ時間を示し、u´はコントローラモデルから算出される操作量の計算値を示している。
As described above, when modeling the system in the present embodiment, the process model of the
4.3 遺伝的アルゴリズム
図4のステップS2に記載されたシステム同定処理では、式(5)のコントローラのモデルと式(3)のプロセスモデルにおいて用いられた8個のパラメータ(a1,a2,b0,b1,d,Kc,Ti,Td)を同定する処理が実行される。ここで、ステップS2におけるシステム同定処理の内容について、当該処理のサブルーチンのフローチャートである図5を参照して説明する。
4.3 Genetic Algorithm In the system identification process described in step S2 of FIG. 4, the eight parameters (a 1 , a 2 ) used in the controller model of equation (5) and the process model of equation (3) are used. , B 0 , b 1 , d, K c , T i , T d ) are identified. Here, the contents of the system identification process in step S2 will be described with reference to FIG. 5 which is a flowchart of the subroutine of the process.
図5を参照して、システム同定処理では、CPU101は、まずステップS21で、初期設定を行い、ステップS22へ処理を進める。
Referring to FIG. 5, in the system identification process,
本実施の形態では、上記したシステム同定に必要な8個のパラメータを、遺伝的アルゴリズム(GA)を用いて決定する。そして、ステップS21における初期設定では、当該GAによるパラメータの決定において必要とされる初期条件の設定が行われる。ここで、GAによる8個のパラメータの決定がどのように行われるかについて、概略を説明する。図6に、GAによるパラメータの決定の流れを概略的に示す。 In the present embodiment, the eight parameters necessary for the system identification described above are determined using a genetic algorithm (GA). In the initial setting in step S21, initial conditions necessary for determining parameters by the GA are set. Here, an outline of how the determination of the eight parameters by the GA is performed will be described. FIG. 6 schematically shows the flow of parameter determination by the GA.
図6を参照して、GAによるパラメータの決定には、A.初期集団の決定、B.選択、C.交差、D.突然変異の4つの工程が含まれる。以下、各工程の内容を説明する。 With reference to FIG. B. Determination of initial population. Selection, C.I. Intersection, D. Four steps of mutation are included. Hereinafter, the content of each process is demonstrated.
A.初期集団の発生
GAでは、CPU101は、上記した8個のパラメータを1組として、N組の初期個体を発生させる。ここで、8個のパラメータそれぞれについて、式(6)〜式(13)に示されるような上限値と下限値が設定されている。CPU101は、各パラメータについて、式(6)〜式(13)に示されるような下限値(各パラメータについてminの添字を付されたもの)から上限値(各パラメータについてmaxの添字を付されたもの)の範囲内で、初期個体を発生させる。
A. Generation of initial population In the GA, the
以下の説明では、各個体(8個のパラメータを1組としたもの)をP1〜PNとして表わす。N個の初期個体を、初期集団と呼ぶ。 In the following description, each individual (a set of eight parameters) is represented as P 1 to P N. N initial individuals are referred to as an initial population.
B.選択
CPU101は、N個の個体P1〜PNのそれぞれについて、適応度を算出する。適応度の算出は、目的関数f(Pn)について、各個体に含まれるパラメータを用いて、算出される。目的関数f(Pn)は、次の式(14)で表わされる。
B.
目的関数f(Pn)は、各個体を構成するパラメータの組ごとに、操業データにおける時刻(d+1)から時刻Xについて、所定の時間間隔(本実施の形態では、1分間隔)ごとの制御量の操業データとプロセスモデルを使って算出した制御量の計算値(予測値)の差の二乗と、その(d+1)の時間だけ前の操作量の操業データとコントローラモデルを使って算出した操作量の計算値(予測値)の差の二乗の和を積算した値となっている。本実施の形態では、GAによって、コントローラ51とプロセス52とがコントローラ10とプロセス20になるべく近い挙動を示すようなパラメータの組を求めようとしている。したがって、目的関数f(Pn)の値が小さいほど、その算出に用いられた個体(パラメータの組)は、コントローラ10とプロセス20により適応させたものといえる。つまり、本実施の形態では、目的関数f(Pn)の値が小さいものほど、その算出に用いられた
個体(パラメータの組)の適応度が高いと考えられる。そして、本実施の形態のGAでは、N個の個体を含む初期集団(または、後述する次世代の集団)から、目的関数の値が小さいものから順にM個(M<N)の個体が選択される。
The objective function f (P n ) is controlled every predetermined time interval (1 minute interval in the present embodiment) from time (d + 1) to time X in the operation data for each set of parameters constituting each individual. The square of the difference between the operation data of the quantity and the calculated value (predicted value) of the control quantity calculated using the process model, and the operation calculated using the operation data and the controller model of the operation quantity of the previous (d + 1) time It is a value obtained by integrating the sum of the squares of the difference between the calculated values (predicted values) of the quantities. In the present embodiment, it is attempted to obtain a set of parameters that causes the
C.交差
交差では、CPU101は、上記選択によって得られたM個の個体の中から任意に2個の個体PiとPjを選出し、8個のパラメータすべてを次に式(15)および式(16)に基づいて交差させ、新たな個体Pkと固体Pl)を発生させる。このような交差で、たとえばE個の個体を新たに発生させる。
C. Crossing In the crossing, the
なお、式(15)と式(16)では、Psupは固体PiとPJのうち、目的関数の値の小さいもの(適応度が高いもの)を表している。 In Expressions (15) and (16), P sup represents the solid P i and P J having a small objective function value (high fitness).
D.突然変異
上記選択によって選択したM個の個体の中から一定の割合の個体を選出し、各個体に含まれるパラメータの中の一定の個数のパラメータの値を上記した式(6)〜式(13)の範囲内でランダムな値に置き換えることによって、CPU101は、新たにF個の個体を生成する。
D. Mutation A certain percentage of individuals are selected from the M individuals selected by the above selection, and the values of a certain number of parameters among the parameters included in each individual are expressed by the above formulas (6) to (13). ), The
以上説明した初期集団の発生から突然変異までの処理により、N個の個体によって構成されていた集団は、その中からM個の個体が選択され、E個の個体が交差によって発生し、そして、突然変異によってF個の個体が発生する。そして、これらの個体、つまり(M+E+F)個の個体が、次世代の集団とされる。 By the process from the generation of the initial population described above to the mutation, a population composed of N individuals is selected from among the M individuals, E individuals are generated by crossing, and Mutations generate F individuals. These individuals, that is, (M + E + F) individuals are taken as the next generation population.
そして、当該次世代の集団に対して、再度、上記した選択から突然変異までの処理が適用されることによって、さらに次の世代の集団が発生する。 Then, the next generation population is further generated by applying the above-described processing from selection to mutation again to the next generation population.
本実施の形態では、予め定められた世代まで集団を発生させ、最終的に発生させた集団における最も目的関数の値が小さい個体に含まれるパラメータの組を、コントローラ51とプロセス52のモデルを構成するパラメータとされる。
In the present embodiment, a group is generated up to a predetermined generation, and a set of parameters included in an individual having the smallest objective function value in the finally generated group is configured as a model of the
4.4 システム同定処理の内容
図5は、図4のステップS2におけるシステム同定処理のサブルーチンのフローチャートである。以下、システム同定処理の内容について説明する。
4.4 Contents of System Identification Process FIG. 5 is a flowchart of a system identification process subroutine in step S2 of FIG. Hereinafter, the contents of the system identification process will be described.
図5を参照して、システム同定処理では、CPU101は、まずステップS21でGAによるシステム同定(上記8個のパラメータの決定)のために初期設定を行って、ステップS22へ処理を進める。
Referring to FIG. 5, in the system identification process,
ここで、初期設定とは、上記した式(6)〜式(13)に示した8個のパラメータの下限値と上限値の入力を受付け、また、GAによってパラメータを決定する際の集団を発生させる世代数Gの入力を受付ける。 Here, the initial setting is to accept the input of the lower limit value and the upper limit value of the eight parameters shown in the above formulas (6) to (13), and generate a group for determining the parameters by GA. The input of the generation number G to be accepted is accepted.
ステップS22では、CPU101は、現時点での集団の世代が、ステップS21で設定を受付けたGであるか否かを判断し、そうであると判断するとステップS26へ処理を進め、まだ世代数がGに達していないと判断するとステップS23へ処理を進める。
In step S22, the
ステップS23では、CPU101は、図6を参照して説明した「選択」を実行し、ステップS24へ処理を進める。
In step S23, the
ステップS24では、CPU101は、図6を参照して説明した「交差」を実行して、ステップS25へ処理を進める。
In step S24, the
ステップS25では、CPU101は、図6を参照して説明した「突然変異」を実行して、ステップS22へ処理を戻す。
In step S25, the
以上説明したように、ステップS23からステップS25までの処理は、GAにおいて扱われる個体の集団の世代数がGとなるまで続けられる。そして、集団の世代数がGとなると、ステップS26へ処理が進められる。 As described above, the processing from step S23 to step S25 is continued until the number of generations of the group of individuals handled in GA becomes G. When the number of generations of the group becomes G, the process proceeds to step S26.
ステップS26では、CPU101は、第G世代の集団の中の最も目的関数の値が小さいもの(適応度が高いもの)を構成するパラメータの組を、コントローラ51とプロセス52のモデルを構成するパラメータの組として決定して、図4へ処理を戻す。
In step S <b> 26, the
[5.最適パラメータの算出]
本実施の形態では、図4のステップS3における最適パラメータ算出処理において、一般化最小分散制御(GMVC)に基づいて、コントローラ10のプロセス20に対するPID制御について、最適なパラメータの算出が行われる。ここで、その内容について説明
する。
[5. Calculation of optimal parameters]
In the present embodiment, in the optimum parameter calculation process in step S3 of FIG. 4, the optimum parameter is calculated for the PID control for the
まず、本実施の形態におけるプロセス20の離散時間モデルは、次の式(17)で表わすことができるものとする。
First, it is assumed that the discrete time model of the
![]()
![]()
なお、式(17)中で、A(z-1)とB(z-1)は、次の式(18)と式(19)で表わされる離散時間モデルの係数多項式であるとする。 In equation (17), A (z −1 ) and B (z −1 ) are assumed to be coefficient polynomials of the discrete time model expressed by the following equations (18) and (19).
また、式(17)において、y(t)は制御量を示し、u(t)は操作量を示し、χ(t)はモデル化誤差を示し、z-1は時間遅れ演算子(z-1y(t)=y(t−1))を意味し、Δは差分演算子(1−z-1)を意味している。 In equation (17), y (t) represents a control amount, u (t) represents an operation amount, χ (t) represents a modeling error, and z −1 represents a time delay operator (z − 1 y (t) = y (t−1)), and Δ means a difference operator (1-z −1 ).
時刻t+1のとき、式(17)は、次の式(20)となる。
At
![]()
![]()
そして、式(20)は、次の式(21)のように書くことができる。 Expression (20) can be written as the following expression (21).
![]()
![]()
ここで、Diophantine方程式を式(22)に示す。 Here, the Diophantine equation is shown in Formula (22).
![]()
![]()
このDiophantine方程式から、次の式(23)の関係を得ることができる。 From this Diophantine equation, the relationship of the following equation (23) can be obtained.
![]()
![]()
なお、制御量y(t+1)と予測値y′(t+1|t)との関係は式(24)として表わすことができる。 The relationship between the control amount y (t + 1) and the predicted value y ′ (t + 1 | t) can be expressed as Expression (24).
![]()
![]()
そして、これにより、次の式(25)の関係が得られる。 Thereby, the relationship of the following equation (25) is obtained.
![]()
![]()
一方、PIDコントローラ(コントローラ10)のモデルは、式(4)で示され、次の式(26)のように書き直すことができる。 On the other hand, the model of the PID controller (controller 10) is expressed by equation (4) and can be rewritten as the following equation (26).
![]()
![]()
そして、式(26)のC(z-1)は、次の式(27)の係数多項式で表わされる。 C (z −1 ) in Expression (26) is represented by a coefficient polynomial in Expression (27) below.
次に、一般化最小分散制御の評価規範に基づいて、最適なPIDパラメータを求めることを考える。 Next, it is considered to obtain an optimum PID parameter based on the evaluation standard of generalized minimum dispersion control.
上記評価規範の1つの形が、次の式(28)として与えられる。 One form of the evaluation criteria is given as the following equation (28).
ここで、P(z-1)は、次の式(29)で表わされる。 Here, P (z −1 ) is expressed by the following formula (29).
![]()
![]()
なお、式(28)において、λは重み係数を表わしている。λの与え方については、後述する。 In equation (28), λ represents a weighting factor. How to give λ will be described later.
P(z-1)は、離散時間モデルの設計多項式で、各係数は、望ましい制御性を示すように、次の式(30)〜式(35)のように与える。 P (z −1 ) is a design polynomial of a discrete time model, and each coefficient is given as in the following Expression (30) to Expression (35) so as to indicate a desired controllability.
ここで、σは、立ち上がり時間を表わすパラメータで、プロセスの時定数Tとむだ時間Lの和の0.5倍から1.0倍が望ましい。本実施の形態では、式(34)で例示するように、0.75倍とする。 Here, σ is a parameter representing the rise time, and is preferably 0.5 to 1.0 times the sum of the process time constant T and the dead time L. In the present embodiment, as exemplified by the equation (34), it is 0.75 times.
一方、μは、応答の減衰特性を表わすパラメータであり、式(33)に示されるように、δによって与えられる。δは、0.0から2.0の範囲が望ましく、本実施の形態では、式(35)に例示されるように0.0とする。 On the other hand, μ is a parameter representing the attenuation characteristic of the response, and is given by δ as shown in the equation (33). δ is preferably in the range of 0.0 to 2.0. In this embodiment, δ is set to 0.0 as exemplified in Equation (35).
次に、「一次遅れ+むだ時間」系と、「積分+むだ時間」系を例に、プロセスの離散時間モデルから時定数Tとむだ時間L、プロセスゲインKの求め方について述べる。 Next, how to obtain the time constant T, the dead time L, and the process gain K from the discrete time model of the process will be described by taking the “primary delay + dead time” system and the “integration + dead time” system as examples.
「一次遅れ+むだ時間」系は、温度制御などのプロセスを表現する際にしばしば用いられ、「積分+むだ時間」系は、液面制御などのプロセスを表現する際によく用いられている。 The “first order delay + dead time” system is often used to represent processes such as temperature control, and the “integral + dead time” system is often used to represent processes such as liquid level control.
なお、「一次遅れ+むだ時間」系では、各パラメータは、次の式(36)〜式(38)に従って求められる。 In the “first order delay + dead time” system, each parameter is obtained according to the following equations (36) to (38).
また、「積分+むだ時間」系では、各パラメータは、次の式(39)〜式(41)に従って求められる。 Further, in the “integration + dead time” system, each parameter is obtained according to the following equations (39) to (41).
ここで、dは、離散時間系における純粋むだ時間であり、Lは立ち上がり初期を含めた実用的なむだ時間を意味している。また、積分系の場合、緩やかな制御が好まれるため、時定数Tを特別に積分時定数の2倍としている。 Here, d is a pure time delay in a discrete time system, and L means a practical time delay including the initial rise. In the case of an integral system, since gentle control is preferred, the time constant T is specially set to twice the integral time constant.
上記した式(28)の評価規範に式(23)を代入すると、次の式(42)が得られる。 Substituting equation (23) into the evaluation criterion of equation (28) above yields the following equation (42).
そして、無相関である性質を利用することによって、これを最小化する制御則が、次の式(43)として得られる。 And the control law which minimizes this by using the property which is uncorrelated is obtained as following Formula (43).
![]()
![]()
さらに、式(43)の第2項の係数多項式を定常項に置き換えると、式(44)が得られる。 Further, when the coefficient polynomial of the second term in the equation (43) is replaced with a stationary term, the equation (44) is obtained.
![]()
![]()
そして、式(44)の第2項を次の式(45)のように定義する。 Then, the second term of the equation (44) is defined as the following equation (45).
![]()
![]()
これにより、式(44)は、次の式(46)のようになる。 Thereby, Formula (44) becomes like the following Formula (46).
ここで、式(46)とPIDコントローラの離散モデルである式(26)とを比較すると、次の式(47)の関係が得られる。 Here, when the equation (46) is compared with the equation (26) which is a discrete model of the PID controller, the relationship of the following equation (47) is obtained.
![]()
![]()
そして、これにより、評価規範を最小化とするPIDパラメータを、次の式(48)〜式(50)で求めることができる。 And thereby, the PID parameter which minimizes an evaluation norm can be calculated | required by following Formula (48)-Formula (50).
すなわち、適切なλを与えられ場、F(z-1)の係数を求めることができ、これにより、式(48)〜式(50)を用いてPIDパラメータを算出することができる。 That is, given an appropriate λ, the coefficient of F (z −1 ) can be obtained, and thereby the PID parameter can be calculated using the equations (48) to (50).
式(28)の評価規範において、λを変化させたときの制御誤差の分散(すなわち、目標値と制御量との偏差の分散E[e2(t)])と、制御入力の分散(すなわち、操作変化量の分散[(Δu(t))2])の様子をプロットすると、図7に示すようなTrade-off曲線(曲線L)が得られる。この曲線上から最も望ましいλを得るために、次の式(51)に示す評価関数を定義する。 In the evaluation criterion of equation (28), the variance of the control error when λ is changed (that is, the variance E [e 2 (t)] of the deviation between the target value and the controlled variable) and the variance of the control input (ie, When the state of the variance [(Δu (t)) 2 ]) of the operation change amount is plotted, a Trade-off curve (curve L) as shown in FIG. 7 is obtained. In order to obtain the most desirable λ from this curve, an evaluation function shown in the following equation (51) is defined.
![]()
![]()
ここで、K2は重み係数に相当し、式(37)または式(40)のプロセスゲインで決めることとする。 Here, K 2 corresponds to a weighting factor, and be determined by the process gain of formula (37) or formula (40).
なお、制御誤差e(t)と操作量Δu(t)は、定常状態において、次の式(52)と式(53)の関係が得られる。 The control error e (t) and the operation amount Δu (t) have the relationship of the following equations (52) and (53) in a steady state.
ただし、T(z-1)は、式(54)で表される。 However, T (z <-1> ) is represented by Formula (54).
![]()
![]()
このとき、制御誤差e(t)と操作量Δu(t)の分散は、H2ノルムを用いて計算す
ることとし、次の式(55)を最小とするλを求める。これにより、前述した最適なPIDパラメータが求まる。
At this time, the variance of the control error e (t) and the manipulated variable Δu (t) is calculated using the H 2 norm, and λ that minimizes the following equation (55) is obtained. Thereby, the optimum PID parameter described above is obtained.
具体的なPIDパラメータの算出手順は、次のSA1〜SA6の手順として示すことができる。 A specific PID parameter calculation procedure can be shown as the following procedures SA1 to SA6.
SA1:式(36)〜式(38)または式(39)〜(41)に基づき、T,K,Lを算出
SA2:式(30)〜式(35)に基づき、Pを算出
SA3:式(22)に基づき、Fを算出(ここで、むだ時間がある場合は、プロセスをパディ近似した離散時間モデルからFを求めるか、逐次計算でむだ時間を考慮したFを求める)
SA4:λに初期値を与えて、式(48)〜式(50)に基づき、λに対応するPIDパラメータを算出
SA5:式(52)と式(53)に基づき、制御誤差の分散E[e2(t)]と制御入
力(制御量)の分散[(Δu(t))2]を算出
SA6:SA4,SA5を繰り返し計算して、式(55)を最小とするλを求め、これに対応するPIDパラメータを出力
なお、このような場合の、式(55)を最小とするλは、図7中の曲線L中の点Pに相当する。
SA1: Calculate T, K, and L based on Formula (36) to Formula (38) or Formula (39) to (41) SA2: Calculate P based on Formula (30) to Formula (35) SA3: Formula Calculate F based on (22) (If there is a dead time, find F from a discrete-time model that approximates the process by paddy, or obtain F considering the dead time by sequential calculation)
SA4: An initial value is given to λ, and a PID parameter corresponding to λ is calculated based on equations (48) to (50). SA5: Control error variance E [based on equations (52) and (53) e 2 (t)] and the variance [(Δu (t)) 2 ] of the control input (control amount) are calculated. SA6: SA4 and SA5 are repeatedly calculated to obtain λ that minimizes the expression (55). The λ that minimizes the expression (55) in such a case corresponds to the point P in the curve L in FIG.
[6.シミュレーション]
次に、図4のステップS4におけるシミュレーション処理の内容について説明する。
[6. simulation]
Next, the contents of the simulation process in step S4 of FIG. 4 will be described.
上記したように、本実施の形態のチューニング装置100では、システム同定処理が行われることにより、プロセスモデル(式(3))に用いられたプロセスパラメータ(a1,a2,b0,b1,d)とコントローラモデル(式(5))に用いられたパラメータ(Kc,Ti,Td)の推定値が得られる(ステップS2)。そして、推定されたプロセスモデルを用いて、コントローラに対する最適なPIDパラメータが算出される(ステップS3)。
As described above, in the
そして、CPU101は、シミュレーション処理として、上記のように得られたプロセスモデルを用い、推定されたPIDパラメータ(以下、「推定パラメータ」)を適用した場合の制御量の時間変化のシミュレーションと、算出された最適なPIDパラメータ(以下、「推奨パラメータ」)を適用した場合の制御量の時間変化のシミュレーションを実行する。図8(A)に、シミュレーション結果を示す。なお、図8(A)のグラフの横軸は、時間を表している。
Then, the
まず、図8(A)では、実線で、ステップ状に変化する目標値が示されている。そして、図8(A)では、実線で示されたようにステップ状に目標値が変化した際の、推定パラメータを適用した場合の制御量の時間変化が破線で示され、推奨パラメータを適用した場合の制御量の時間変化が一点鎖線で示されている。 First, in FIG. 8A, a target value that changes stepwise is indicated by a solid line. In FIG. 8A, the change over time in the control amount when the estimation parameter is applied when the target value changes stepwise as indicated by the solid line is indicated by a broken line, and the recommended parameter is applied. The time change of the control amount in this case is indicated by a one-dot chain line.
図8(B)には、上記した推定したプロセスモデルのパラメータが示され、図8(C)には、コントローラのPIDパラメータが示されている。 FIG. 8B shows the parameters of the estimated process model described above, and FIG. 8C shows the PID parameters of the controller.
なお、図8(C)では、「以前」「推定」「推奨」「現在」の4種類の組のPIDパラメータが示されている。「以前」とは、図4に示された処理が実行される前の実際のプラントでコントローラに適用されていたパラメータである。「推定」とは、図5に示したシステム同定処理によって操業データから「以前」のパラメータを推定した結果で、コントローラモデルの同定の結果として算出されたPIDパラメータである。「以前」の値と「推定」の各パラメータの値が近ければ、ユーザは、システム同定処理によるシステム同定精度は高く、信頼できる結果であると評価することができる。 In FIG. 8C, four types of PID parameters, “Previous”, “Estimated”, “Recommended”, and “Current” are shown. “Previous” is a parameter applied to the controller in the actual plant before the processing shown in FIG. 4 is executed. “Estimation” is a result of estimating a “previous” parameter from operation data by the system identification process shown in FIG. 5 and is a PID parameter calculated as a result of controller model identification. If the “previous” value is close to the “estimated” parameter value, the user can evaluate that the system identification accuracy by the system identification process is high and the result is reliable.
また、図8(C)において、「推奨」とは、ステップS3で実行した最適パラメータ算出処理によって算出されたPIDパラメータである。そして、「現在」とは、ユーザによって新たに設定された実際のPIDパラメータである。なお、ユーザは、このパラメータを、たとえば推奨パラメータを参考にして設定することができる。これらの4種類のPIDパラメータは、いずれも、HD103に格納されている。
In FIG. 8C, “recommended” is the PID parameter calculated by the optimum parameter calculation process executed in step S3. “Current” is an actual PID parameter newly set by the user. The user can set this parameter with reference to recommended parameters, for example. These four types of PID parameters are all stored in the
[7.結果の提示]
CPU101は、結果提示処理(ステップS5)として、図8(A)〜図8(C)に示した情報を表示部108に表示させることができる。このような場合に表示部108に表示される画面の一例を図9に示す。
[7. Presentation of results]
The
図9を参照して、画面900には、図8(A)に示したグラフを表示する表示欄910と、図8(B)に示したプロセスパラメータを表示する表示欄911と、図8(C)に示したPIDパラメータを表示する表示欄912,915とが含まれる。なお、画面900中のボタン913をクリックされることにより、CPU101は、図4に示された処理を実行する。表示欄912には「推定」のPIDパラメータが表示され、表示欄915には「推奨」のPIDパラメータが表示される。なお、ユーザは、入力部106を適宜操作することにより、表示欄912内の数値を変更することができる。
Referring to FIG. 9,
CPU101は、ボタン914に対して操作がなされることにより、表示欄912,915に表示されたPIDパラメータと、表示欄911に表示されたプロセスパラメータを適用したプロセスモデルを利用して、制御量の時間変化をシミュレーションし、その結果を表示する。なお、シミュレーションの態様は、特許文献1に記載の態様を採用することができる。
The
また、画面900では、表示欄920に、破線で設定値SV(Set Variable)の、実線で制御量PV(Process Variable)の、一日分の変化が横軸を時間として提示されている。また、表示欄930には、操作量MV(Manipulative Variable)の一日分の変化が横軸を時間として提示されている。
In the
また、表示欄910には、シミュレーションの結果として、プロセス52のステップ応答特性として、5時間分の制御量の変化が示されている。具体的には、表示欄910では、ステップ状に変化する設定値が実線で示され、表示欄912に示された「推定」のパラメータを用いた制御量のシミュレーション結果が破線で示され、そして、表示欄915に示された「推奨」のパラメータを用いた制御量のシミュレーション結果が一点鎖線で示されている。
In the
[8.本実施の形態のチューニング装置によるチューニングについて]
実際にプラントに適用した、本実施の形態のチューニング装置によるPIDコントローラのチューニング前後の挙動を図10に示す。
[8. Tuning by the tuning device of the present embodiment]
FIG. 10 shows the behavior before and after tuning of the PID controller by the tuning apparatus of the present embodiment actually applied to the plant.
図10(A)は、チューニング前のプロセスの制御量の時間変化を示し、図10(B)は、チューニング後のプロセスの制御量の時間変化を示す。なお、チューニング後とは、プロセスのコントローラで利用されるPIDパラメータが、上記した「推奨」のパラメータを参考にチューニングされた後を意味する。 FIG. 10A shows the time change of the control amount of the process before tuning, and FIG. 10B shows the time change of the control amount of the process after tuning. Note that “after tuning” means that the PID parameter used in the process controller has been tuned with reference to the above-mentioned “recommended” parameters.
図10(A)と図10(B)を比較すると、チューニング後の方が、チューニング前よりも、制御量の変化の幅が狭くなっている。 Comparing FIG. 10 (A) and FIG. 10 (B), the amount of change in the control amount is narrower after tuning than before tuning.
これにより、本実施の形態によれば、プロセスの挙動を落ち着いたものとすることができる。 Thereby, according to this Embodiment, the behavior of a process can be made calm.
[9.表示画面の関連付け]
図4を参照して説明したように、本実施の形態では、処理対象となっている制御ループの制御性が評価され(ステップS1A)、その内容に応じてステップS2以降の処理を実行するか否かが、CPU101の実行するプログラムによって決定されている。
[9. Display screen association]
As described with reference to FIG. 4, in the present embodiment, the controllability of the control loop to be processed is evaluated (step S1A), and whether or not the processing after step S2 is executed according to the contents of the control loop. No is determined by the program executed by the
なお、図4を参照して説明した処理は、このような評価結果を表示部108に表示し、当該画面に対する操作内容に応じて、すなわち、解析対象とする制御ループの選択操作に応じて、ステップS2以降の処理を実行するか否かが決定されるように変更されても良い。
The process described with reference to FIG. 4 displays such an evaluation result on the
図12は、制御ループごとの制御性についての評価内容が表示された画面の一例であり、図13は、図4のフローチャートの上記のような変形例のフローチャートである。図13のフローチャートでは、図4のフローチャートのステップS1Bの代わりにステップS1C,S1Dが設けられている。 FIG. 12 is an example of a screen on which the evaluation content for controllability for each control loop is displayed, and FIG. 13 is a flowchart of the above-described modification of the flowchart of FIG. In the flowchart of FIG. 13, steps S1C and S1D are provided instead of step S1B of the flowchart of FIG.
この変形例では、ステップS1Aの結果として、図12に示される画面が表示される。画面800には、制御性が低いと評価された制御ループごとの制御量のトレンド810,820が示されている。そして、各トレンド810,820に関連付けられて、表示欄811,821に、制御ループごとの制御性の評価内容が表示されている。
In this modification, the screen shown in FIG. 12 is displayed as a result of step S1A. The
表示欄811,821において、「総合指標」とは、上記した制御性評価指標ηに関連する値であり、また、「周期」は、制御量に周期性があると判断された場合の周期である。
In the
また、表示欄811,821において、「コメント」は、周期性の有無や制御性評価指標ηの値、その他の診断結果に基づいて表示されるメッセージである。たとえば、表示欄811には「チューニング不良。」、表示欄821には「バルブ、または計器不良の疑いあり。」というメッセージが表示されている。なお、このようなメッセージは、評価内容に関連付けられて、たとえばHD103内に記憶されている。
In the display fields 811 and 821, “comment” is a message displayed based on the presence or absence of periodicity, the value of the controllability evaluation index η, and other diagnostic results. For example, a message “Tuning failure” is displayed in the
そして、これらのメッセージには、ステップS2以降の処理を実行するための処理内容がリンクされている。 These messages are linked with the processing contents for executing the processing after step S2.
図13を参照して、ステップS1Aにおいて制御性の評価がなされ、その結果として、制御性の低い制御ループの抽出結果が、図12に示されるような画面800に表示された後、CPU101は、ステップS1Dで、上記のようなステップS2以降に処理を進めるリンクが操作されたか(メッセージがクリックされたか)否かが判断される。
Referring to FIG. 13, controllability is evaluated in step S1A, and as a result, the extraction result of the control loop with low controllability is displayed on a
そして、メッセージがクリックされたと判断されると、クリックされたメッセージが対応する制御ループについて、ステップS2以降の処理が実行される。これにより、当該制御ループについてのシステム同定処理(ステップS2)等が実行され、結果として、当該制御ループについての結果提示処理に基づく画面900(図9参照)が表示される。なお、図9の画面900は、トレンド810に対応したコントーラについての制御パラメータ算出結果に相当する画面である。表示欄920の制御量PVは、トレンド810と同一である。
When it is determined that the message has been clicked, the processes after step S2 are executed for the control loop to which the clicked message corresponds. Thereby, the system identification process (step S2) etc. about the said control loop are performed, and the screen 900 (refer FIG. 9) based on the result presentation process about the said control loop is displayed as a result. Note that the
一方、画面800に表示されたいずれのメッセージ(コメント)もクリックされることなく制御性の評価結果についての表示を終了させるための操作がなされた場合には(ステップS1Dで「NO」判断時)、そのまま終了する。 On the other hand, when an operation for terminating display of the controllability evaluation result is performed without clicking any message (comment) displayed on the screen 800 (when “NO” is determined in step S1D). , It ends as it is.
以上説明した本実施の形態のチューニング装置100では、コントローラ10とプロセス20から構成される実際のプラントの操業データが利用されて、仮想のコントローラ51と仮想のプロセス52のモデル化が行なわれ、そして、得られたプロセス52のモデルを用いて、コントローラ51の最適な制御パラメータが算出される。コントローラ10のチューニングに際し、算出された制御パラメータの数値を参考にチューニングを実施することができる。なお、チューニング装置100では、コントローラ51ごとに制御性を評価し、制御性が低いと判断されたコントローラ51についてのみ、上記モデル化や最適な制御パラメータの算出等が実行されるため、計算負荷を低減することができる。さらに、図13で示した変形例のように、予め複数の制御ループの制御性を評価しておけば、制御性の低いコントローラに対して、集中的にチューニングを実施できるため、効率的に制御性を向上させることができるといった利点がある。
In the
今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなく、特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。 The embodiment disclosed this time should be considered as illustrative in all points and not restrictive. The scope of the present invention is defined by the terms of the claims, rather than the description above, and is intended to include any modifications within the scope and meaning equivalent to the terms of the claims.
10,51 コントローラ、20,52 プロセス、53 適応度算出部、54 パラメータ処理部、100 チューニング装置、101 CPU、102 I/O、103 HD、103A プログラム記憶部、103B 操業データ記憶部、104 メディアドライブ、104A 記録媒体、105 RAM、106 入力部、108 表示部、109 通信制御部、800,900 画面。 10, 51 controller, 20, 52 process, 53 fitness calculation unit, 54 parameter processing unit, 100 tuning device, 101 CPU, 102 I / O, 103 HD, 103A program storage unit, 103B operation data storage unit, 104 media drive , 104A recording medium, 105 RAM, 106 input unit, 108 display unit, 109 communication control unit, 800, 900 screen.
Claims (7)
前記プロセスの操業データを取得して記憶する記憶手段と、
前記プロセスの操業データに基づいて、前記コントローラの制御性を評価する評価手段と、
前記評価手段によって制御性が低いと評価されたことを条件として、前記取得した操業データを使って、コントローラのモデルに対する制御パラメータと、一定の制限に基づくプロセスのモデルに対するプロセスパラメータとを同定する同定手段とを備え、
前記同定手段は、次の式(1)で表される目的関数f(P n )の値を算出し、
yは、前記プロセスの出力である制御量であり、
y´は、前記プロセスのモデルから算出される制御量の計算値であり、
uは、前記コントローラの操作量であり、
u´は、前記コントローラのモデルから算出される操作量の計算値であり、
dは、むだ時間であり、
前記目的関数f(P n )は、時刻(d+1)から時刻Xについて、所定の時間間隔ごとの、制御量の操業データと当該制御量の計算値との差の二乗と、(d+1)時刻前の操作量の操業データと当該操作量の計算値との差の二乗の和を合算する関数であり、
前記同定手段は、前記プロセスパラメータと前記制御パラメータの複数の組(n)ごとに目的関数f(P n )の値を算出し、当該目的関数f(P n )の値が最も小さい組を、前記プロセスのモデルに対するプロセスパラメータと前記コントローラのモデルに対する制御パラメータとして同定し、
前記装置は、
前記同定手段が同定した前記制御パラメータおよび前記プロセスパラメータに基づく前記コントローラのモデルと前記プロセスのモデルを用いて、前記プロセスの制御応答のシミュレーションを実行するシミュレーション手段をさらに備える、PIDコントローラのチューニング装置。 A device that tunes a controller that controls PID (proportional-integral-derivative) processes,
Storage means for acquiring and storing operation data of the process;
Evaluation means for evaluating the controllability of the controller based on the operation data of the process;
Identification that identifies a control parameter for a controller model and a process parameter for a process model based on a certain restriction using the acquired operation data on the condition that the controllability is evaluated by the evaluation means. and means,
The identification means calculates a value of an objective function f (P n ) represented by the following formula (1) :
y is a control amount that is an output of the process,
y ′ is a calculated value of the controlled variable calculated from the model of the process,
u is the operation amount of the controller;
u ′ is a calculated value of the operation amount calculated from the model of the controller,
d is the dead time,
From time (d + 1) to time X, the objective function f (P n ) is the square of the difference between the operation data of the control amount and the calculated value of the control amount for each predetermined time interval, and (d + 1) time before Is a function that adds the sum of the squares of the difference between the operation data of the manipulated variable and the calculated value of the manipulated variable,
The identification means calculates a value of the objective function f (P n ) for each of the plurality of sets (n) of the process parameter and the control parameter, and sets a group having the smallest value of the objective function f (P n ), Identifying process parameters for the process model and control parameters for the controller model;
The device is
A tuning apparatus for a PID controller, further comprising simulation means for simulating a control response of the process using the controller model and the process model based on the control parameter and the process parameter identified by the identification means.
前記一定の制限として、前記プロセスのモデルを、むだ時間と積分系を含む二次遅れ系の動的モデルとし、
前記操業データとして、周期振動をしているデータを使ってパラメータを同定する、請求項1に記載のPIDコントローラのチューニング装置。 The identification means includes
As the certain limitation, the model of the process is a dynamic model of a second order lag system including a dead time and an integration system,
The PID controller tuning device according to claim 1, wherein a parameter is identified by using periodic vibration data as the operation data.
前記シミュレーション手段は、前記算出手段が算出した前記最適な制御パラメータに基づく前記コントローラのモデルと、前記同定手段が同定した前記プロセスパラメータに基づく前記プロセスのモデルとを用いて、前記シミュレーションを実行する、請求項1〜請求項3のいずれかに記載のPIDコントローラのチューニング装置。 Using the process model obtained by the identification means, based on generalized minimum variance control, evaluate the variance of the control amount in the process model and the variance of the operation amount in the controller model, and the evaluation value is the minimum A calculation means for calculating the optimal control parameter
The simulation means executes the simulation using a model of the controller based on the optimal control parameter calculated by the calculation means and a model of the process based on the process parameter identified by the identification means. The tuning device for a PID controller according to any one of claims 1 to 3.
前記変更したパラメータに基づく前記コントローラのモデルおよび前記プロセスのモデルを用いて前記シミュレーションを実行する手段をさらに備える、請求項1〜請求項4のいずれかに記載のPIDコントローラのチューニング装置。 Input means for changing the optimum control parameter calculated by the calculating means;
5. The PID controller tuning device according to claim 1, further comprising means for executing the simulation using a model of the controller and a model of the process based on the changed parameter. 6.
コンピュータに、
前記プロセスの操業データを取得して記憶するステップと、
前記プロセスの操業データに基づいて、前記コントローラの制御性を評価するステップと、
前記制御性が低いと評価されたことを条件として、前記取得した操業データを使って、コントローラのモデルに対する制御パラメータと、一定の制限に基づくプロセスのモデルに対するプロセスパラメータとを同定するステップとを実行させ、
前記同定するステップは、次の式(1)で表される目的関数f(P n )の値を算出することを含み、
yは、前記プロセスの出力である制御量であり、
y´は、前記プロセスのモデルから算出される制御量の計算値であり、
uは、前記コントローラの操作量であり、
u´は、前記コントローラのモデルから算出される操作量の計算値であり、
dは、むだ時間であり、
前記目的関数f(P n )は、時刻(d+1)から時刻Xについて、所定の時間間隔ごとの、制御量の操業データと当該制御量の計算値との差の二乗と、(d+1)時刻前の操作量の操業データと当該操作量の計算値との差の二乗の和を合算する関数であり、
前記同定するステップは、前記プロセスパラメータと前記制御パラメータの複数の組(n)ごとに前記目的関数f(P n )の値を算出し、当該目的関数f(P n )の値が最も小さい組を、前記プロセスのモデルに対するプロセスパラメータと前記コントローラのモデルに対する制御パラメータとして同定することを含み、
前記コンピュータに、
前記同定するステップで得た前記プロセスのモデルを用い、一般化最小分散制御に基づいて、前記プロセスのモデルにおける制御量の分散とコントローラのモデルにおける操作量の分散とを評価し、その評価値が最小となる最適な制御パラメータを算出するステップと、
前記同定したプロセスパラメータと前記同定した制御パラメータに基づいて、前記プロセスの制御応答のシミュレーションを実行するステップと、
前記同定したプロセスパラメータと前記算出した最適な制御パラメータに基づいて、前記プロセスの制御応答のシミュレーションを実行するステップとをさらに実行させる、PIDコントローラのチューニング用プログラム。 A program for tuning a controller for controlling a process by PID (proportional-integral-derivative),
On the computer,
Obtaining and storing operational data of the process;
Evaluating the controllability of the controller based on operational data of the process;
On the condition that the controllability is evaluated to be low, with the operational data the acquired and a step of identification and control parameters for the model of the controller, and process parameters for the model of the process based on certain restrictions Let
The identifying step includes calculating a value of an objective function f (P n ) represented by the following equation (1) :
y is a control amount that is an output of the process,
y ′ is a calculated value of the controlled variable calculated from the model of the process,
u is the operation amount of the controller;
u ′ is a calculated value of the operation amount calculated from the model of the controller,
d is the dead time,
From time (d + 1) to time X, the objective function f (P n ) is the square of the difference between the operation data of the control amount and the calculated value of the control amount for each predetermined time interval, and (d + 1) time before Is a function that adds the sum of the squares of the difference between the operation data of the manipulated variable and the calculated value of the manipulated variable,
The identifying step calculates a value of the objective function f (P n ) for each of a plurality (n) of the process parameters and the control parameters, and sets the smallest value of the objective function f (P n ). Identifying as process parameters for the model of the process and control parameters for the model of the controller,
In the computer,
Using the process model obtained in the identifying step, based on the generalized minimum variance control, evaluate the variance of the control amount in the process model and the variance of the operation amount in the controller model, and the evaluation value is Calculating an optimal control parameter that minimizes; and
Performing a simulation of a control response of the process based on the identified process parameter and the identified control parameter;
A PID controller tuning program for further executing a step of executing a simulation of a control response of the process based on the identified process parameter and the calculated optimum control parameter.
前記プロセスの操業データを取得して記憶するステップと、
前記プロセスの操業データに基づいて、前記コントローラの制御性を評価するステップと、
前記制御性が低いと評価されたことを条件として、前記取得した操業データを使って、コントローラのモデルに対する制御パラメータと、一定の制限に基づくプロセスのモデルに対するプロセスパラメータとを同定するステップとを備え、
前記同定するステップは、次の式(1)で表される目的関数f(P n )の値を算出することを含み、
yは、前記プロセスの出力である制御量であり、
y´は、前記プロセスのモデルから算出される制御量の計算値であり、
uは、前記コントローラの操作量であり、
u´は、前記コントローラのモデルから算出される操作量の計算値であり、
dは、むだ時間であり、
前記目的関数f(P n )は、時刻(d+1)から時刻Xについて、所定の時間間隔ごとの、制御量の操業データと当該制御量の計算値との差の二乗と、(d+1)時刻前の操作量の操業データと当該操作量の計算値との差の二乗の和を合算する関数であり、
前記同定手段は、前記プロセスパラメータと前記制御パラメータの複数の組(n)ごとに目的関数f(P n )の値を算出し、当該目的関数f(P n )の値が最も小さい組を、前記プロセスのモデルに対するプロセスパラメータと前記コントローラのモデルに対する制御パラメータとして同定することを含み、
前記チューニングする方法は、
前記同定するステップで得た前記プロセスのモデルを用い、一般化最小分散制御に基づいて、前記プロセスのモデルにおける制御量の分散とコントローラのモデルにおける操作量の分散とを評価し、その評価値が最小となる最適な制御パラメータを算出するステップと、
前記同定したプロセスパラメータと前記同定した制御パラメータに基づいて、前記プロセスの制御応答のシミュレーションを実行するステップと、
前記同定したプロセスパラメータと前記算出した最適な制御パラメータに基づいて、前記プロセスの制御応答のシミュレーションを実行するステップとをさらに備える、PIDコントローラのチューニング方法。 A method for tuning a controller that controls a process with PID (proportional-integral-derivative),
Obtaining and storing operational data of the process;
Evaluating the controllability of the controller based on operational data of the process;
On the condition that the controllability is evaluated to be low, with the operational data the acquired comprises a step of identification and control parameters for the model of the controller, and process parameters for the model of the process based on certain restrictions ,
The identifying step includes calculating a value of an objective function f (P n ) represented by the following equation (1) :
y is a control amount that is an output of the process,
y ′ is a calculated value of the controlled variable calculated from the model of the process,
u is the operation amount of the controller;
u ′ is a calculated value of the operation amount calculated from the model of the controller,
d is the dead time,
From time (d + 1) to time X, the objective function f (P n ) is the square of the difference between the operation data of the control amount and the calculated value of the control amount for each predetermined time interval, and (d + 1) time before Is a function that adds the sum of the squares of the difference between the operation data of the manipulated variable and the calculated value of the manipulated variable,
The identification means calculates a value of the objective function f (P n ) for each of the plurality of sets (n) of the process parameter and the control parameter, and sets a group having the smallest value of the objective function f (P n ), Identifying as a process parameter for the model of the process and a control parameter for the model of the controller,
The tuning method is:
Using the process model obtained in the identifying step, based on the generalized minimum variance control, evaluate the variance of the control amount in the process model and the variance of the operation amount in the controller model, and the evaluation value is Calculating an optimal control parameter that minimizes; and
Performing a simulation of a control response of the process based on the identified process parameter and the identified control parameter;
A method of tuning a PID controller, further comprising the step of simulating a control response of the process based on the identified process parameter and the calculated optimal control parameter.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008211647A JP5125875B2 (en) | 2008-08-20 | 2008-08-20 | PID controller tuning apparatus, PID controller tuning program, and PID controller tuning method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008211647A JP5125875B2 (en) | 2008-08-20 | 2008-08-20 | PID controller tuning apparatus, PID controller tuning program, and PID controller tuning method |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010049392A JP2010049392A (en) | 2010-03-04 |
| JP2010049392A5 JP2010049392A5 (en) | 2011-05-26 |
| JP5125875B2 true JP5125875B2 (en) | 2013-01-23 |
Family
ID=42066436
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008211647A Expired - Fee Related JP5125875B2 (en) | 2008-08-20 | 2008-08-20 | PID controller tuning apparatus, PID controller tuning program, and PID controller tuning method |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5125875B2 (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106325104A (en) * | 2016-10-28 | 2017-01-11 | 黑龙江省电力科学研究院 | Setting and adjustment method for thermal control PID parameters based on MATLAB modeling and simulation |
| CN107272443A (en) * | 2017-06-19 | 2017-10-20 | 中国华电科工集团有限公司 | A kind of control method and device for controlled system |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101957879B (en) * | 2010-09-25 | 2015-12-02 | 清华大学 | Towards the Parameter Variation simulation system of semiconductor manufacturing facility functional simulation |
| JP6352623B2 (en) * | 2013-12-05 | 2018-07-04 | 株式会社東芝 | Control performance diagnosis device and control performance diagnosis program |
| CN114488774B (en) * | 2021-12-16 | 2022-09-27 | 上海中韩杜科泵业制造有限公司 | PID control parameter acquisition method, device, equipment and medium |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06195105A (en) * | 1992-12-22 | 1994-07-15 | Dainippon Screen Mfg Co Ltd | Self-tuning controller |
| JPH09198148A (en) * | 1996-01-23 | 1997-07-31 | Tokyo Electron Ltd | Device and method for determining control parameter for heat treating device |
| JP4633253B2 (en) * | 2000-12-28 | 2011-02-16 | 住友化学株式会社 | PID control device tuning method |
| JP2004265069A (en) * | 2003-02-28 | 2004-09-24 | Yaskawa Electric Corp | Model parameter identification method for virtual passive joint model and its control process |
| JP4536666B2 (en) * | 2006-02-13 | 2010-09-01 | 出光興産株式会社 | Optimal adjustment system and optimum adjustment method for PID controller |
-
2008
- 2008-08-20 JP JP2008211647A patent/JP5125875B2/en not_active Expired - Fee Related
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106325104A (en) * | 2016-10-28 | 2017-01-11 | 黑龙江省电力科学研究院 | Setting and adjustment method for thermal control PID parameters based on MATLAB modeling and simulation |
| CN107272443A (en) * | 2017-06-19 | 2017-10-20 | 中国华电科工集团有限公司 | A kind of control method and device for controlled system |
| CN107272443B (en) * | 2017-06-19 | 2020-11-13 | 中国华电科工集团有限公司 | Control method and device for controlled system |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010049392A (en) | 2010-03-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6928119B2 (en) | Computer systems and methods for building and deploying predictive inference models online | |
| CN101652730B (en) | Apparatus and method for automated closed-loop identification of an industrial process in a process control system | |
| JP6985833B2 (en) | Data processing equipment, control systems, data processing methods and programs | |
| JP6458403B2 (en) | Prediction model generation device, prediction model generation method, and program | |
| JP2019519871A (en) | Control the target system using forecasting | |
| US20140135947A1 (en) | Method of monitoring an industrial process | |
| JP2004503000A (en) | Multivariate matrix process control | |
| JP4908433B2 (en) | Control parameter adjustment method and control parameter adjustment program | |
| JP5125875B2 (en) | PID controller tuning apparatus, PID controller tuning program, and PID controller tuning method | |
| JP2009512097A (en) | System, method, and computer program for early event detection | |
| JP5338492B2 (en) | Input variable selection support device | |
| JP2004178492A (en) | Plant simulation method using enhanced learning method | |
| JP6718500B2 (en) | Optimization of output efficiency in production system | |
| JP7350601B2 (en) | Information processing device, information processing method, and information processing program | |
| WO2022030041A1 (en) | Prediction system, information processing device, and information processing program | |
| WO2012001213A1 (en) | Tracking simulation method | |
| JP5125754B2 (en) | PID controller tuning apparatus, PID controller tuning program, and PID controller tuning method | |
| JP2021120833A (en) | Model update device and method and process control system | |
| JP4698578B2 (en) | Methods and articles for detecting, verifying, and repairing collinearity | |
| Korbicz et al. | Confidence estimation of GMDH neural networks and its application in fault detection systems | |
| Salsbury | Continuous-time model identification for closed loop control performance assessment | |
| Jain et al. | A filter-based approach for performance assessment and enhancement of SISO control systems | |
| JP5168544B2 (en) | Plant operation support device | |
| Madakyaru | Experimental and Simulation Investigation of an Adaptive Model Predictive Control Scheme: Model Parametrized by Orthonormal Basis Function | |
| JP2021082367A (en) | Simulation device, simulation method, and simulation program |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110408 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110408 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120620 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120626 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120813 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121002 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121015 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5125875 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151109 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |