JP5110100B2 - Rice transplanter - Google Patents
Rice transplanter Download PDFInfo
- Publication number
- JP5110100B2 JP5110100B2 JP2010030201A JP2010030201A JP5110100B2 JP 5110100 B2 JP5110100 B2 JP 5110100B2 JP 2010030201 A JP2010030201 A JP 2010030201A JP 2010030201 A JP2010030201 A JP 2010030201A JP 5110100 B2 JP5110100 B2 JP 5110100B2
- Authority
- JP
- Japan
- Prior art keywords
- turning
- planting
- turn
- distance
- control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 235000007164 Oryza sativa Nutrition 0.000 title claims description 26
- 235000009566 rice Nutrition 0.000 title claims description 26
- 240000007594 Oryza sativa Species 0.000 title 1
- 241000209094 Oryza Species 0.000 claims description 25
- 238000000034 method Methods 0.000 claims description 23
- 230000033001 locomotion Effects 0.000 claims description 14
- 230000001174 ascending effect Effects 0.000 claims description 8
- 239000003337 fertilizer Substances 0.000 claims description 8
- 238000001514 detection method Methods 0.000 claims description 5
- 230000002159 abnormal effect Effects 0.000 claims description 2
- 230000000694 effects Effects 0.000 description 5
- 238000010586 diagram Methods 0.000 description 3
- 230000004720 fertilization Effects 0.000 description 2
- 230000007935 neutral effect Effects 0.000 description 2
- 230000035939 shock Effects 0.000 description 2
- 230000037303 wrinkles Effects 0.000 description 2
- 230000005856 abnormality Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
Images






Landscapes
- Guiding Agricultural Machines (AREA)
- Transplanting Machines (AREA)
- Lifting Devices For Agricultural Implements (AREA)
Description
本発明は、機体に備えた植付部により機体走行とともに植付作業をする田植機に搭載され、機体の走行動作と植付部の動作を制御する田植機に関するものである。 The present invention relates to a rice transplanter that is mounted on a rice transplanter that performs planting work together with the traveling of the aircraft by a planting unit provided in the aircraft, and controls the traveling operation of the aircraft and the operation of the planting unit.
機体に備えた植付部により機体走行とともに植付作業をする田植機において、特許文献1に示すように、機体の旋回動作と連動して植付部の動作を制御するようにした田植機が知られている。この田植機は、少なくとも、畦際部の周回植付け作業に到るまでの中央部の往復植付け作業において、往復走行する植付行程と、その端部で機体をUターンする旋回行程とを制御する。植付行程においては、植付部の下降と伝動クラッチオンにより、機体の前進走行にしたがって複数条の苗を植付けする。旋回行程においては、植付部のクラッチオフによって植付け動作を停止するとともに、植付部を上昇した上でUターンにより隣接位置に移る。この隣接位置において、植付部の下降とクラッチオンの制御により先の植付け終了位置から植付けを再開する。このように、旋回動作と付帯して植付部の制御を自動で行う旋回付帯制御を導入することにより、オペレータの負担を軽減することができる(特許文献1参照)。
In a rice transplanter that performs planting work together with traveling by the planting unit provided in the aircraft, as shown in
しかし、上記旋回付帯制御においては、機体の旋回動作を基準に植付範囲が決められることから、旋回動作領域よりも植付停止範囲を広く、または、逆に狭くする場合等には適用できないので、植付け条数等の作業機仕様と多様な圃場条件との相互関係により、煩わしい手動操作による大きな操作負担を強いられる場合があった。 However, since the planting range is determined based on the turning motion of the airframe in the above-mentioned turn attendant control, it cannot be applied to a case where the planting stop range is wider or conversely narrower than the turning operation region. In some cases, due to the interrelationship between the specifications of the work equipment such as the number of planting ridges and various field conditions, a large operational burden due to cumbersome manual operation may be imposed.
解決しようとする問題点は、オペレータの操作負担を低減するべく、幅広い条件に適用可能な田植機を提供する点にある。 The problem to be solved is to provide a rice transplanter applicable to a wide range of conditions in order to reduce the operation burden on the operator.
上記課題を解決するために、次のような技術的手段を講じた。
すなわち、請求項1の発明は、植付部を備えて走行下で植付作業をするための機体の旋回動作を制御するとともに、その旋回動作と連動して上記植付部の動作を制御する制御部を備える田植機において、上記制御部は、距離カウントが第1の旋回距離になるまで待機し、第1の旋回距離になったら旋回操作中であることを条件に植付部を下降させ、続いて、植始め自動切替スイッチが入であることを条件に、距離カウントが第2の旋回距離になるまで待機し、第2の旋回距離になったら自動で植付部を稼動させる状態と、手動で植付部を稼動させる状態とに切替可能であるターン制御手段を備えることを特徴とする田植機とした。
In order to solve the above problems, the following technical measures were taken.
That is, the invention of
請求項2の発明は、前記ターン制御手段は、機体旋回と連動して、植付けクラッチを切り植付部を上昇する制御と、機体旋回と連動して、植付けクラッチを切るが、植付部は上昇しない制御とを切替可能とすることを特徴とする請求項1に記載の田植機とした。
The invention according to
請求項3の発明は、前記ターン制御手段は、植付部の稼動指令に先立ち、距離カウントが第3の旋回距離になるまで待機し、第3の旋回距離になったら旋回の操作が異常操作状態でないことを条件に施肥部を稼動することを特徴とする請求項1または2に記載の田植機とした。
According to a third aspect of the present invention, the turn control means waits until the distance count reaches the third turning distance prior to the operation command of the planting unit, and the turning operation is abnormally performed when the third turning distance is reached. The rice transplanter according to
請求項4の発明は、制御部は、機体を旋回制御する際の複数の旋回パターンを内設し、その中から1つの旋回パターンを選択操作するための切替手段を備え、ターン制御手段は、植付部の上昇モードスイッチをチェックし、上昇モードでない場合に、距離カウントが第1の旋回距離になるまで待機し、第1の旋回距離になったら旋回操作中であることを条件に植付部を下降させ、続いて、植始め自動切替スイッチが入であることを条件に、距離カウントが第2の旋回距離になるまで待機し、第2の旋回距離になったら植付部の稼動を指令する制御する構成とし、各センサ値読込の後に、変速位置が植付速になるまで待機し、変速位置が植付速になったら上記切替手段をチェックし、切替手段の選択に応じたパターンの旋回処理を行う旋回パターン制御手段とを備えることを特徴とする請求項1から請求項3のうちのいずれか1項に記載の田植機とした。
According to a fourth aspect of the present invention, the control unit includes a plurality of turning patterns for turning control of the airframe, and includes switching means for selecting and operating one turning pattern from among the turning patterns. Check the ascending mode switch of the planting unit, and if it is not in the ascending mode, wait until the distance count reaches the first turning distance and planting on the condition that the turning operation is in progress when the first turning distance is reached. Next, on the condition that the automatic start switch for planting is turned on, the system waits until the distance count reaches the second turning distance, and when the second turning distance is reached, the operation of the planting part is started. It is configured to command and control, after each sensor value is read, wait until the shifting position reaches the planting speed, and when the shifting position reaches the planting speed, the above switching means is checked, and the pattern according to the selection of the switching means Swivel pattern It was planting machine according to any one of claims 3, further comprising a down control unit from
請求項5の発明は、前記切替手段で選択する旋回パターンが、機体前進動作の終了による停車検出に基づいて植付部を上昇させ、その後に後進し、その後の機体の前進で距離カウントを開始してターン制御を行うバックターンと、旋回のためのハンドル操作で距離カウントを開始してターン制御を行う自動ターンと、植付部の稼動停止操作で距離カウントを開始し、その後の旋回のためのハンドル操作でターン制御を行う枕地調節ターンであることを特徴とする請求項4に記載の田植機とした。 According to a fifth aspect of the present invention, the turning pattern selected by the switching means raises the planting unit based on detection of stoppage due to the end of the aircraft forward movement, then moves backward, and starts counting the distance when the aircraft advances thereafter. and a back turn takes a turn control, and an automatic turn performs start to turn control the distance count in handle operation for turning, it starts the distance count in operation stop operation of the planting unit, for subsequent turning The rice transplanter according to claim 4, wherein the rice transplanter is a headland adjustment turn in which turn control is performed by operating the handle.
請求項6の発明は、前記制御部が、植付部が稼動状態でないときに、ハンドル操作があれば前記自動ターンに設定し、ハンドル操作なしで機体前進状態であれば前記枕地調節ターンに設定し、ハンドル操作なしで機体前進状態でなく、タイマにより設定された範囲で機体前進状態であれば前記バックターンに設定する制御を行うことを特徴とする請求項5に記載の田植機とした。 In the invention of claim 6, when the planting unit is not in an operating state, the control unit sets the automatic turn if there is a handle operation, and sets the headland adjustment turn if the aircraft advances without a handle operation. 6. The rice transplanter according to claim 5, wherein control is performed to set the back turn if the aircraft is in a forward state within a range set by a timer instead of the forward state without the steering operation . .
請求項1の発明は、自動処理と手動処理を作業現場の状況に合わせて使い分けることにより、旋回時の作業性を向上することができる。
The invention according to
請求項2の発明は、請求項1の発明の効果に加えて、植付部に備えたフロート部によって圃場の表面を均平することができるので、車輪跡を消して圃場をきれいにすることができる。その一方で、高畦では当たらないように植付部を上昇して旋回することができる。
In the invention of
請求項3の発明は、請求項1または2の発明の効果に加えて、植付けに先立つ施肥部の稼動により、長い吐出路による吐出遅れを調整して施肥のタイミングを合わせることができる。
A third aspect of the present invention, in addition to the effect of the invention according to
請求項4の発明は、請求項1から請求項3のうちのいずれか1項に記載の発明の効果に加えて、制御部に複数の旋回パターンを備えることから、各種の条件の旋回が可能となり、また、旋回パターンを選択操作するための切替手段を備えることから、切替手段の操作によって選択された旋回パターンで旋回制御される。したがって、機体を旋回する際は、選択手段の簡易な切替操作によって好ましい旋回パターンを選ぶことにより、現場状況や作業内容に対応して機体の旋回動作と連動して植付部を制御することができる。
In addition to the effect of the invention according to any one of
請求項5の発明は、請求項4の発明の効果に加えて、バックターンと自動ターンと枕地調節ターンを選択できる。 The invention of claim 5, in addition to the effect of the invention of claim 4 can be selected back turn and automatic turn and headland adjusted turn.
請求項6の発明は、請求項5の発明の効果に加えて、ティーチングモードでオペレータが最初の行程を行うことにより、ターン選択スイッチを操作しなくても旋回パターンが自動的に選択されるので、操作が簡単になり操作性を向上することができる。 According to the sixth aspect of the invention , in addition to the effect of the fifth aspect of the invention, the turning pattern is automatically selected without operating the turn selection switch by the operator performing the first stroke in the teaching mode. The operation becomes simple and the operability can be improved.
本発明の実施の形態について、以下に図面に基づいて詳細に説明する。
図1は田植機の側面図である。田植機1は、転向車輪2、2と後輪3、3とによって4輪駆動可能に機体を支持し、操舵ハンドル4、オペレータシート5、エンジン6、植付部7のほか、各種機器を制御する後述の制御部を備える。
Hereinafter, embodiments of the present invention will be described in detail with reference to the drawings.
FIG. 1 is a side view of a rice transplanter. The
植付部7は、機体後部に昇降部11を介して昇降可能に取付けられ、図示せぬ植付クラッチを介して機体の走行に合わせて多条植え動作するほか、植付け動作と連動して苗を順次送り出す送出部13、薬肥を吐出する施肥部14、均平用のフロート部15…等を備える。
The planting part 7 is attached to the rear part of the machine body so as to be able to move up and down via a
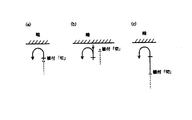
制御部は、図2のターン切替スイッチ(切替手段)21の切替操作により、「バックターン」「自動ターン」「枕地調節ターン」の中から選択に応じたパターンの旋回処理を行うべく構成する。「自動ターン」は、図3(a)に示すように、旋回のためのハンドル操作に対応して植付を停止し、機体旋回に付帯して所定の手順で植付けを再開する旋回パターンであり、「バックターン」は、図3(b)に示すように、畦に近接した位置まで進んで停車するとともに植付けを停止し、その後の機体後進に続く機体旋回に付帯して植付けを再開するものであり、「枕地調節ターン」は、図3(c)に示すように、機体旋回の手前位置から植付けを停止してさらに前進し、続く機体旋回に付帯して植付けを再開するものである。 The control unit is configured to perform a turning process of a pattern according to the selection from “back turn”, “automatic turn”, and “headland adjustment turn” by switching operation of the turn changeover switch (switching means) 21 in FIG. . As shown in FIG. 3A, the “automatic turn” is a turning pattern in which planting is stopped in response to a steering operation for turning, and planting is resumed in a predetermined procedure accompanying the turning of the aircraft. As shown in Fig. 3 (b), the "back turn" is the one that proceeds to the position close to the eaves, stops and stops planting, and then resumes planting along with the subsequent aircraft turn. As shown in FIG. 3 (c), the “headland adjustment turn” is to stop planting from a position before the aircraft turns and further advance, and to resume planting incidental to the subsequent aircraft turn. .
信号処理をする制御部22の入出力構成は、図4の系統図に示すように、旋回パターンを選択するための切替スイッチ21の入力信号のほか、各種のスイッチ、センサの信号を受け、また、走行と作業動作用の各種機器のアクチュエータ類を制御する。具体的には、入力側に、植付け動作指令用のフィンガーレバースイッチ23a、植付け自動動作選択用の植始め自動切替スイッチ23、植付部7の自動上昇選択用の植付部上昇モードスイッチ24、変速操作検知用のHSTレバー位置センサ25、操舵操作検知用のハンドル切れ角センサ26、時間調節用のタイムラグ調節ダイヤル27、ブレーキ操作検知用のブレーキペダルセンサ28等、また、出力側に、油圧シリンダ11aを介して植付部7を昇降する電磁油圧バルブ11b、植付部動作用の植付クラッチ作動ソレノイド31、施肥機動作用の施肥クラッチ作動ソレノイド32、HSTレバー傾動用のHSTモータ33等を接続する。
As shown in the system diagram of FIG. 4, the input / output configuration of the
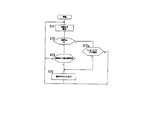
上記制御部22による制御処理は、図5のフローチャートに示すように、各センサ値読込(S1)の後に、変速位置が植付速(S2)になるまで待機してターン選択用の切替スイッチ21をチェック(S3)し、「バックターン」「自動ターン」「枕地調節ターン」の中から選択に応じたパターンの旋回処理を行う。それぞれの旋回処理は、植付停止位置の相違に伴う個別の処理を行う。
As shown in the flowchart of FIG. 5, the control process by the
各旋回パターンについて詳細に説明すると、「バックターン」は、HSTレバー位置センサ25の信号によりHSTレバーが中立(S11)で、主クラッチが「切」(S12)でないことを条件に、すなわち、主クラッチが「入」になるまで待機して植付部「上昇」と植付クラッチ「切」とを指令(S13)する。
The turning pattern will be described in detail. The “back turn” is based on the condition that the HST lever is neutral (S11) and the main clutch is not “disengaged” (S12) according to the signal from the HST
この場合、HSTレバーの中立検出によって旋回制御の感知精度を向上することができる。また、図示せぬ接触センサ等による畦検知センサを機体前端部に設け、畦の側面に最接近した時の検知信号によりレバー傾動装置33を介してHSTレバーを中立に戻し、自動停車するように構成することにより、畦との衝突を防止して位置決め精度を向上し、以降の制御精度を確保することができる。 In this case, the detection accuracy of the turning control can be improved by detecting the neutrality of the HST lever. In addition, a wrinkle detection sensor such as a contact sensor (not shown) is provided at the front end of the body, and the HST lever is returned to neutral via the lever tilting device 33 according to a detection signal when approaching the side surface of the wrinkle to automatically stop. By configuring, it is possible to prevent the collision with the rod and improve the positioning accuracy, and to secure the subsequent control accuracy.
主クラッチ「切」の場合は、所定時間以上の停車継続を検出した場合を含め、旋回処理を中止することにより、植付け途中の異常停車等に対応することができる。この時は、オペレータが後進操作を行うことにより、「バックターン」の処理に復帰するように構成する。また、植付部「上昇」は、機体の後進動作の前に行われることから、機体後進とともに作業部を上昇する通常のバックリフト動作による機体後進の際に植付部7が上昇しきれずに表土に喰い込むという事態が回避されるので、フロート部15の破損を防止することができる。 In the case of the main clutch “disengaged”, it is possible to cope with an abnormal stop or the like during planting by stopping the turning process, including the case where continuation of the stop for a predetermined time or more is detected. At this time, it is configured to return to the “back turn” process when the operator performs a reverse operation. In addition, since the planting part “rise” is performed before the backward movement of the aircraft, the planting part 7 cannot be fully raised during the backward movement of the aircraft due to the normal backlift operation that raises the working unit with the backward movement of the aircraft. Since the situation of biting into the topsoil is avoided, breakage of the float portion 15 can be prevented.
次いで、衝撃緩和のため所定時間の経過を挟んで所定距離後進(S14)する。この後進の際は、その時間的余裕により、走行方向切替によってオペレータが受けるショックを抑えるとともに、植付部7の上昇動作が遅い場合の表土への喰い込みを防止することができる。また、後進動作による車輪跡によって植え付け済みの圃場面が乱れ、その植苗を倒すことなく車輪跡を消すのは煩わしい手間を要するので、上記後進動作は、植え終わり位置までの範囲に規制する。 Next, the vehicle travels a predetermined distance backward (S14) with a lapse of a predetermined time in order to alleviate the impact. During this reverse travel, the time margin allows the operator to receive less shock due to switching of the traveling direction and prevent biting into the topsoil when the ascending operation of the planting part 7 is slow. Moreover, since the planted field scene is disturbed by the wheel traces caused by the backward movement, and it is troublesome to erase the wheel traces without defeating the seedlings, the backward movement is restricted to the range up to the planting end position.
所定時間の経過後に前進操作(S15)を待ってドライブシャフト回転による距離カウントを開始(S16)する。この前進操作に代えてHSTレバーの傾動指令によって機体を前進させるように構成することにより、操作性の向上を図ることができる。また、機体の前進開始までのタイムラグを設けることにより、オペレータが受けるショックを抑えることができ、さらに、タイムラグ調節ダイヤル27を設けることにより後進時と前進時について好みの時間に設定できるので、操作性を向上することができる。 After a predetermined time elapses, a forward operation (S15) is waited, and a distance count by drive shaft rotation is started (S16). The operability can be improved by configuring the aircraft to move forward by a tilt command of the HST lever instead of the forward operation. Further, by providing a time lag until the aircraft starts moving forward, the shock received by the operator can be suppressed, and by providing the time lag adjustment dial 27, it is possible to set the preferred time for backward and forward movement, so that operability Can be improved.
この前進開始に続く旋回のためのハンドル操作(S17)に応じて後述の左または右の所定のターン制御(S18,S18)により、機体の旋回動作に付帯して所定位置から植付けを再開する。所定のターン制御(S18)は、左右共通のサブルーチン処理によるものであり、他の旋回パターンにも組み込み可能に構成する。 The planting is resumed from a predetermined position accompanying the turning operation of the airframe by predetermined left or right turn control (S18, S18) to be described later in response to a steering operation (S17) for turning following the start of forward movement. The predetermined turn control (S18) is based on the left and right common subroutine processing, and is configured to be incorporated into other turning patterns.
このように制御処理する「バックターン」の処理は、植付け条数の少ない田植機を使用する場合において、圃場中央部の往復植付け作業において畦に近接した位置まで植付けすることにより、作業部の植付け幅に適合させるべく畦際部の周回植付け作業幅を小さくすることができる。なお、ブレーキペダルセンサ28の信号によって旋回処理の制御を中止するべく構成した場合には、異状に際して安全性を確保することができる。
In the case of using a rice transplanter with a small number of planting lines, the control of the “back turn” process is carried out by planting the work section by planting up to a position close to the culm in the reciprocating planting operation in the center of the field. In order to adapt to the width, it is possible to reduce the circumferential planting work width of the ridge part. In the case where the control of the turning process is stopped by the signal of the
「自動ターン」は、旋回のためのハンドル操作(S21)に応じて上記同様に距離カウントを開始(S22,S22)するとともに、対応するターン制御(S18,S18)により所定位置から植付けを再開する。また、「枕地調節ターン」は、植付「切」操作(S31)を条件として上記同様に距離カウントを開始(S32)し、前進を続行した後に旋回のためのハンドル操作(S33)に応じてターン制御(S18,S18)をすることにより所定位置から植付けを再開する。 In the “automatic turn”, distance counting is started (S22, S22) in the same manner as described above in response to a steering operation for turning (S21), and planting is resumed from a predetermined position by corresponding turn control (S18, S18). . In addition, the “headland adjustment turn” starts distance counting (S32) in the same manner as described above under the condition of the planting “cutting” operation (S31), and continues the forward movement and then responds to the steering operation (S33) for turning. Then, planting is resumed from a predetermined position by performing turn control (S18, S18).
サブルーチン処理による左または右のターン制御処理の詳細は、図6のフローチャートに示すように、植付部7の上昇モードスイッチ24をチェック(S41)し、上昇モードでない場合にドライブシャフト回転数チェック(S42)によって所定の旋回距離n1になるまで待ち、旋回操作の判定のためにハンドル角度が規定値a(例えば90°)以上であることを条件に植付部「下げ」を指令(S44)する。逆に上昇モードの場合は、植付部「上げ」を指令(S41a)する。ハンドル角度が規定値a以上でない場合は、警報出力(S43a)の上で処理を終了する。 For details of the left or right turn control processing by the subroutine processing, as shown in the flowchart of FIG. 6, the ascending mode switch 24 of the planting unit 7 is checked (S41). Wait until the predetermined turning distance n1 is reached in S42), and instruct the turning operation “decrease” on the condition that the handle angle is equal to or greater than a specified value a (for example, 90 °) in order to determine the turning operation (S44). . On the contrary, in the case of the ascending mode, the planting part “raising” is commanded (S41a). If the handle angle is not equal to or greater than the specified value a, the process is terminated after an alarm output (S43a).
次いで、ドライブシャフト回転数チェック(S45)によって所定の旋回距離n2’になるまで待機し、異常操作の判定のためにハンドル角度が規定値b(例えば180°)以上でないことを条件に施肥クラッチ「入」を指令(S47)する。ハンドル角度が規定値b以上であれば、上記同様に、警報出力(S43a)の上で処理を終了する。 Next, the drive shaft rotation number check (S45) waits until a predetermined turning distance n2 ′ is reached, and the fertilizer clutch “ "On" is commanded (S47). If the handle angle is equal to or greater than the specified value b, the process is terminated after an alarm output (S43a) as described above.
続いて、植始め自動切替スイッチ23が「入」であることを条件に、ドライブシャフト回転数チェック(S49)によって所定の旋回距離n2になるまで待機し、植付「入」を指令(S50)するとともにドライブシャフト回転カウントクリア(S51)により処理を終了する。また、植始め自動切替スイッチ23が「入」でない場合は処理を終了する。この場合は、後述のように手動操作可能に構成することにより自由度を確保することができる。 Subsequently, on condition that the planting start automatic changeover switch 23 is “ON”, the drive shaft rotation number check (S49) waits until a predetermined turning distance n2 is reached, and planting “ON” is commanded (S50). At the same time, the process is terminated by clearing the drive shaft rotation count (S51). If the planting start automatic change-over switch 23 is not “ON”, the process is terminated. In this case, the degree of freedom can be ensured by configuring so that it can be manually operated as described later.
このように、左または右のターン制御処理により、機体の旋回動作に付帯して植付部7が稼動されることによって所定位置から植付けが再開され、また、植付けに先立つ施肥部の稼動により、長い吐出路による吐出遅れを調整して施肥のタイミングを合わせることができる。 Thus, by the left or right turn control processing, planting is resumed from a predetermined position by operating the planting unit 7 along with the turning operation of the aircraft, and by the operation of the fertilizer before planting, The timing of fertilization can be adjusted by adjusting the discharge delay due to the long discharge path.
また、サブルーチン処理の組み合わせに応じて各種の旋回パターンを簡易に構成することができるので、切替スイッチと簡易な制御処理構成により、条件に応じた旋回処理の適用が可能となる。 In addition, since various turning patterns can be easily configured according to the combination of subroutine processing, the turning processing according to conditions can be applied by the changeover switch and the simple control processing configuration.
つぎに、ティーチングにより旋回パターンを選択する方法について説明する。図7は、ティーチングにより旋回パターンを選択するフローチャートである。最初の行程は、オペレータが植付部7の「入」「切」を行い、枕地に来た時の旋回状態を記憶させ、この1回目のティーチングにより適合するターン形態を自動選択する。 Next, a method for selecting a turning pattern by teaching will be described. FIG. 7 is a flowchart for selecting a turning pattern by teaching. In the first stroke, the operator performs “ON” and “OFF” of the planting unit 7 to store the turning state when the operator comes to the headland and automatically selects a suitable turn form by the first teaching.
詳細には、ティーチングモード(S61)まで待機後、植付クラッチ「入」のチェック(S62)によって該当しなくなるまで待機し、ハンドル操作(S63)があれば自動ターンモードに設定(S63a)する。ハンドル操作なしにHSTモータの「機体前進」(S64)に該当すれば、枕地調節ターンモードに設定(S64a)する。いずれも非該当であれば、タイマ設定(S65)して待機し、その範囲でHSTモータが「機体前進」(S66)であれば、バックターンモードに設定(S66a)する。 Specifically, after waiting until the teaching mode (S61), the control waits until the planting clutch “ON” is checked (S62), and if there is a steering operation (S63), the automatic turn mode is set (S63a). If it corresponds to the “machine forward” (S64) of the HST motor without operating the steering wheel, the headland adjustment turn mode is set (S64a). If neither is applicable, the timer is set (S65) and waits, and if the HST motor is “airframe forward” (S66) within that range, the back turn mode is set (S66a).
このように制御部を構成することにより、ティーチングモードでオペレータが最初の行程を行うことにより、ターン選択スイッチ21を操作しなくても旋回パターンが自動的に選択されるので、操作が簡単になり操作性を向上することができる。
By configuring the control unit in this manner, when the operator performs the first stroke in the teaching mode, the turning pattern is automatically selected without operating the
つぎに、ターン後の植付クラッチの別の取扱いについて説明する。図8は、ターン後の植付クラッチの別の制御処理のフローチャートである。180°旋回の後において、回転センサ読込(S71)の後、植付クラッチの自動処理の選択スイッチ「オン」をチェック(S72)し、該当すれば、回転カウント値が規定値以上(S73)となるまで待機した上で植付クラッチ「入」を指令(S75)する。また、選択スイッチ「オン」に非該当であれば、フィンガップレバーの下げ操作(S72a)がされるまで待機した上で植付クラッチ「入」を指令(S75)する。 Next, another handling of the planting clutch after the turn will be described. FIG. 8 is a flowchart of another control process for the planting clutch after the turn. After turning 180 °, after reading the rotation sensor (S71), the automatic clutch selection switch “ON” is checked (S72), and if applicable, the rotation count value is greater than or equal to the specified value (S73). After waiting until it becomes, the planting clutch “ON” is commanded (S75). If the selection switch “ON” is not applicable, the planting clutch “ON” is commanded (S75) after waiting until the finger lever is lowered (S72a).
このように制御部を構成することにより、植付動作の自動処理と手動処理を植始め自動切替スイッチ23で選択できる。手動処理の場合は、フィンガーレバースイッチ23aの操作に応じて植始めをオペレータが調節することができるので、自動処理と手動処理を作業現場の状況に合わせて使い分けることにより、旋回時の作業性を向上することができる。 By configuring the control unit in this way, automatic processing and manual processing of the planting operation can be selected by the automatic start switch 23. In the case of manual processing, the operator can adjust the planting start in accordance with the operation of the finger lever switch 23a. Therefore, by using both automatic processing and manual processing according to the situation at the work site, workability during turning can be improved. Can be improved.
また、機体旋回と連動して植付けクラッチ「切」とする一方で、昇降モード選択スイッチによって植付部7の昇降モードを自動又は手動とするべく構成することにより、旋回中における植付部7の連動上昇を停止して作業中のままの高さ位置に維持しつつ旋回することが可能となる。このように機体を旋回することにより、植付部7に備えたフロート部15によって圃場の表面を均平することができるので、走行車輪の跡が圃場に残る程度の硬さの場合において、その車輪跡を消して圃場をきれいにすることができる。その一方で、高畦では当たらないように植付部7を上昇して旋回することができる。このように、植付部7についてクラッチと昇降の旋回連動処理のほかに、昇降のみ手動とする2モードのスイッチにより、ユーザの選択範囲が拡大し、適応性を向上することができる。 In addition, the planting clutch is turned off in conjunction with the turning of the aircraft, while the elevation mode of the planting unit 7 is configured to be automatic or manual by the elevation mode selection switch, so that It is possible to make a turn while stopping the interlocking rise and maintaining the height position as it is during work. By turning the aircraft in this way, the surface of the field can be leveled by the float 15 provided in the planting part 7, so in the case of the hardness that the marks of the traveling wheels remain in the field, You can erase the wheel marks and clean the field. On the other hand, the planting part 7 can be raised and swiveled so that it does not hit with a high altitude. Thus, in addition to the clutch-and-lift swivel interlocking process for the planting part 7, the user's selection range can be expanded and adaptability can be improved by a two-mode switch in which only lifting and lowering is manual.
1 田植機
2 転向車輪
3 後輪
4 操舵ハンドル
7 植付部
7a 油圧シリンダ
7b 電磁油圧バルブ
11 昇降部
14 施肥部
15 フロート部
21 ターン切替スイッチ(切替手段)
22 制御部
23a フィンガーレバースイッチ
23 自動切替スイッチ
24 上昇モードスイッチ
24 植付部上昇モードスイッチ
25 レバー位置センサ
26 ハンドル切れ角センサ
27 タイムラグ調節ダイヤル
28 ブレーキペダルセンサ
31 植付クラッチ作動ソレノイド
32 施肥クラッチ作動ソレノイド
33 レバー傾動モータ
DESCRIPTION OF
22 control part 23a finger lever switch 23 automatic changeover switch 24 ascent mode switch 24 planting part ascending
Claims (6)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010030201A JP5110100B2 (en) | 2010-02-15 | 2010-02-15 | Rice transplanter |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010030201A JP5110100B2 (en) | 2010-02-15 | 2010-02-15 | Rice transplanter |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003428561A Division JP4543247B2 (en) | 2003-12-25 | 2003-12-25 | Rice transplanter |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010136727A JP2010136727A (en) | 2010-06-24 |
| JP5110100B2 true JP5110100B2 (en) | 2012-12-26 |
Family
ID=42347375
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010030201A Expired - Fee Related JP5110100B2 (en) | 2010-02-15 | 2010-02-15 | Rice transplanter |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5110100B2 (en) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5022486B2 (en) * | 2010-12-27 | 2012-09-12 | 株式会社クボタ | Working machine |
| JP2021108607A (en) * | 2020-01-14 | 2021-08-02 | 株式会社クボタ | Work machine |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07274631A (en) * | 1994-04-08 | 1995-10-24 | Kubota Corp | Rice transplanter control device |
| JP3635877B2 (en) * | 1997-07-14 | 2005-04-06 | 井関農機株式会社 | Ride type seedling planting machine |
| JP4465063B2 (en) * | 1999-09-21 | 2010-05-19 | 株式会社クボタ | Working device lifting structure of paddy field work machine |
| JP4638998B2 (en) * | 2001-05-16 | 2011-02-23 | 三菱農機株式会社 | Transplanter |
| JP4570285B2 (en) * | 2001-06-20 | 2010-10-27 | ヤンマー株式会社 | Tractor |
| JP2003261059A (en) * | 2002-03-11 | 2003-09-16 | Mitsubishi Agricult Mach Co Ltd | Turning control device for working vehicle |
-
2010
- 2010-02-15 JP JP2010030201A patent/JP5110100B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010136727A (en) | 2010-06-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5267501B2 (en) | Riding type work machine | |
| JP5664634B2 (en) | Rice transplanter | |
| JP2010119363A (en) | Turning/interlocking control type work vehicle | |
| JP2014144008A (en) | Agricultural vehicle | |
| JP5110100B2 (en) | Rice transplanter | |
| JP4415672B2 (en) | Rice transplanter control device | |
| JP4543247B2 (en) | Rice transplanter | |
| JP4622407B2 (en) | Rice transplanter | |
| JP5900210B2 (en) | Rice transplanter | |
| US11917933B2 (en) | Working vehicle | |
| JP5099153B2 (en) | Rice transplanter | |
| JP2005198594A (en) | Seedling raising and lowering control device of seedling planting machine | |
| JP4710396B2 (en) | Riding type work machine | |
| JP5280131B2 (en) | Transplanter | |
| JP4840489B2 (en) | Rice transplanter | |
| JP5088402B2 (en) | Rice transplanter | |
| JP4548094B2 (en) | Rice transplanter | |
| JP5642600B2 (en) | Mobile farm machine | |
| JP5508073B2 (en) | Agricultural work vehicle | |
| JP4631416B2 (en) | Agricultural work vehicle for field running work | |
| JP2006129744A5 (en) | ||
| JP2007029006A (en) | Work vehicle | |
| JP4617205B2 (en) | Transplanter | |
| JP2006006167A (en) | Agricultural work vehicle lift control device | |
| JP4899373B2 (en) | Work vehicle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120911 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120924 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151019 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5110100 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |