JP4896982B2 - 胸郭スタビライザ - Google Patents
胸郭スタビライザ Download PDFInfo
- Publication number
- JP4896982B2 JP4896982B2 JP2008537795A JP2008537795A JP4896982B2 JP 4896982 B2 JP4896982 B2 JP 4896982B2 JP 2008537795 A JP2008537795 A JP 2008537795A JP 2008537795 A JP2008537795 A JP 2008537795A JP 4896982 B2 JP4896982 B2 JP 4896982B2
- Authority
- JP
- Japan
- Prior art keywords
- chest wall
- force
- transverse support
- patient
- stabilizer
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000003381 stabilizer Substances 0.000 title claims abstract description 41
- 210000000038 chest Anatomy 0.000 title claims description 24
- 210000000779 thoracic wall Anatomy 0.000 claims abstract description 92
- 239000012530 fluid Substances 0.000 claims abstract description 26
- 210000000115 thoracic cavity Anatomy 0.000 claims abstract description 22
- 238000005259 measurement Methods 0.000 claims description 7
- 230000005540 biological transmission Effects 0.000 claims description 4
- 230000033001 locomotion Effects 0.000 description 10
- 210000004072 lung Anatomy 0.000 description 6
- 230000029058 respiratory gaseous exchange Effects 0.000 description 5
- 208000014674 injury Diseases 0.000 description 4
- 238000000034 method Methods 0.000 description 4
- 238000009423 ventilation Methods 0.000 description 4
- 210000002417 xiphoid bone Anatomy 0.000 description 4
- 208000027790 Rib fracture Diseases 0.000 description 3
- 230000001154 acute effect Effects 0.000 description 3
- 230000003601 intercostal effect Effects 0.000 description 3
- 230000000241 respiratory effect Effects 0.000 description 3
- 206010017076 Fracture Diseases 0.000 description 2
- 208000027418 Wounds and injury Diseases 0.000 description 2
- 241001433070 Xiphoides Species 0.000 description 2
- 230000006378 damage Effects 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 230000001687 destabilization Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000007774 longterm Effects 0.000 description 2
- 210000001562 sternum Anatomy 0.000 description 2
- 238000001356 surgical procedure Methods 0.000 description 2
- 230000008733 trauma Effects 0.000 description 2
- 238000011282 treatment Methods 0.000 description 2
- 206010000060 Abdominal distension Diseases 0.000 description 1
- 206010001052 Acute respiratory distress syndrome Diseases 0.000 description 1
- 208000010392 Bone Fractures Diseases 0.000 description 1
- 206010008479 Chest Pain Diseases 0.000 description 1
- 208000012661 Dyskinesia Diseases 0.000 description 1
- 206010013975 Dyspnoeas Diseases 0.000 description 1
- 208000004852 Lung Injury Diseases 0.000 description 1
- 208000019693 Lung disease Diseases 0.000 description 1
- 208000023178 Musculoskeletal disease Diseases 0.000 description 1
- 208000012287 Prolapse Diseases 0.000 description 1
- 206010037448 Pulmonary valve incompetence Diseases 0.000 description 1
- 208000013616 Respiratory Distress Syndrome Diseases 0.000 description 1
- 206010069363 Traumatic lung injury Diseases 0.000 description 1
- 210000000683 abdominal cavity Anatomy 0.000 description 1
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 239000008280 blood Substances 0.000 description 1
- 230000037396 body weight Effects 0.000 description 1
- 230000000747 cardiac effect Effects 0.000 description 1
- 208000037265 diseases, disorders, signs and symptoms Diseases 0.000 description 1
- 208000035475 disorder Diseases 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000006261 foam material Substances 0.000 description 1
- 239000000499 gel Substances 0.000 description 1
- 210000000936 intestine Anatomy 0.000 description 1
- 231100000515 lung injury Toxicity 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000005399 mechanical ventilation Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000002232 neuromuscular Effects 0.000 description 1
- 208000018360 neuromuscular disease Diseases 0.000 description 1
- 238000006213 oxygenation reaction Methods 0.000 description 1
- 230000002028 premature Effects 0.000 description 1
- 230000002685 pulmonary effect Effects 0.000 description 1
- 201000010298 pulmonary valve insufficiency Diseases 0.000 description 1
- 210000003019 respiratory muscle Anatomy 0.000 description 1
- 230000000284 resting effect Effects 0.000 description 1
- 230000002269 spontaneous effect Effects 0.000 description 1
- 230000006641 stabilisation Effects 0.000 description 1
- 238000011105 stabilization Methods 0.000 description 1
- 210000002784 stomach Anatomy 0.000 description 1
- 208000024891 symptom Diseases 0.000 description 1
- 238000002560 therapeutic procedure Methods 0.000 description 1
- 210000001519 tissue Anatomy 0.000 description 1
- 238000002627 tracheal intubation Methods 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images




Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H31/00—Artificial respiration or heart stimulation, e.g. heart massage
- A61H31/004—Heart stimulation
- A61H31/006—Power driven
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H31/00—Artificial respiration or heart stimulation, e.g. heart massage
- A61H31/008—Supine patient supports or bases, e.g. improving air-way access to the lungs
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/01—Constructive details
- A61H2201/0173—Means for preventing injuries
- A61H2201/018—By limiting the applied torque or force
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/50—Control means thereof
- A61H2201/5007—Control means thereof computer controlled
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/50—Control means thereof
- A61H2201/5058—Sensors or detectors
- A61H2201/5061—Force sensors
Description
小児集団の場合、胸壁に関する肺コンプライアンスの著しい低下は、特に未熟児の場合は肺動脈弁閉鎖不全症の発症原因となる。肺の、胸壁外方に関する内方戻りが大きくなって胸壁を横断する力のバランスが崩れると静止状態の肺気量が低下する。更には、新生児の場合は胸郭が完全には骨化しておらず呼吸筋も未発達なので胸壁は吸気時に内方に変形しやすい。呼吸努力は一回換気量の有効交換よりはむしろ胸壁変形に費やされる。呼吸時胸壁変形の特徴は、剣状突起−胸骨交叉部位置での前方−後方移動(前方虚脱)、肋間又は肋間内での内方移動(肋間虚脱)、胸郭下部の下方での内方移動(肋骨下虚脱)、胸壁及び腹腔間での非同時/異常動作、が様々な度合いで生じることである。
一実施例では胸郭スタビライザは、胸壁虚脱を測定するようにした虚脱測定器又はリトラクトメーター(retractometer)を含む。横断方向支持体が胸壁に付加する力の大きさは、胸壁虚脱度合いのみならず患者がプラットフォームに加える力に応じるが、ある実施例では、胸郭スタビライザはリトラクトメーターの胸壁虚脱測定値に基づいて胸壁に付加する力を閉ループ様式下に変化させるコントローラを含む。
本発明のある様相では胸郭スタビライザは、プラットフォームと、左右の各横断方向支持体と、リトラクトメーターと、プラットフォーム及び各横断方向支持体に関連する各コントローラ及び各センサと、を含む。プラットフォームに関連するセンサが、患者がプラットフォームに加える力を表す信号を発生し、横断方向支持体に関連するセンサが、横断方向支持体が境壁に加える力を表す信号を発生し、そしてリトラクトメーターが胸壁の虚脱度合いを表す信号を発生する。これらの信号を受けたコントローラは、患者がプラットフォームに加える力と胸壁虚脱度合いとに応じ、横断方向支持体が胸壁に付加する力をそのアルゴリズムに基づいて設定する。
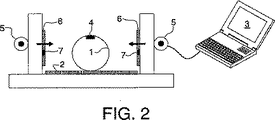
図2を参照するに、本発明の第1実施例に従う胸郭スタビライザが示される。胸壁1を有する患者が円で略示され、その体重FWがプラットフォーム上に支持されている。胸郭スタビライザはプラットフォーム内に位置付けた力トランスデューサー2と、マイクロプロセッサ(例えばCPU)3と、患者の前胸壁の虚脱度合いを測定するリトラクトメーター4とを含み、更には、横断方向支持体6をプラットフォームに関する内方に移動させて胸壁1に横断方向力を付加するようにしたサーボモーター5をも含む。力トランスデューサー2は患者の体重FWが加わると信号を発生し、発生した信号はマイクロプロセッサ3に送られる。
マイクロプロセッサ3からの出力によりサーボモーター5が横断方向支持体6を内方に移動させ、横断方向力FLを胸壁の側部に付加する。横断方向支持体6の付加する横断方向力FLが力センサ7によって監視され、力センサからマイクロプロセッサ3にフィードバック信号が送られる。リトラクトメーター4及び力センサ7からの各フィードバック信号に応答してマイクロプロセッサのアルゴリズムが閉ループ様式下に横断方向力FLを変調し、リトラクトメーター4の胸壁虚脱測定値をほぼゼロに低減させる。マイクロプロセッサ3で使用するアルゴリズムは、胸壁の各側に付加される横断方向力(FL)が、寝た姿勢の患者の体重から横断方向の各胸壁に付加される力よりも大きくならないように抑制することが好ましい。
以上、本発明を実施例を参照して説明したが、本発明の内で種々の変更をなし得ることを理解されたい。
2 力トランスデューサー
3 マイクロプロセッサ
4 リトラクトメーター
5 サーボモーター
6 横断方向支持体
7 力センサ
101 プラットフォーム
102 垂直軸
103 ギヤ駆動システム
104 横断方向支持体
107 伝達機構
108 マイクロプロセッサ
109 リトラクトメーター
202 ピストン
203 流体充填型シリンダ
204 チャンネル
205 横断方向支持体
206 摺動側壁
207 リトラクトメーター
208、209 流体センサ
210 マイクロプロセッサ
Claims (11)
- 胸壁虚脱抑制用の胸郭スタビライザであって、
プラットフォームにして、患者が該プラットフォームに力を付加するようにして患者の少なくとも一部を支えるようになっているプラットフォームと、
患者の前胸壁の虚脱を測定するようになっているリトラクトメーターと、
患者の胸壁の各側と接触して配置され、前胸壁の虚脱を抑制する力を胸壁に付加する一対の横断方向支持体とを含み、
前記横断方向支持体が胸壁に付加する力が、部分的には、患者がプラットフォームに付加する力によって変化する胸郭スタビライザ。 - 横断方向支持体が胸壁に付加する力の大きさが、部分的には、リトラクトメーターによる胸壁虚脱測定度合いに応じたものである請求項1の胸郭スタビライザ。
- 横断方向支持体が胸壁に付加する力の大きさを制御するコントローラーを更に含む請求項2の胸郭スタビライザ。
- コントローラーが、横断方向支持体が胸壁に付加する力をリトラクトメーターによる胸壁虚脱測定に基づいて閉ループ様式下に変化させる請求項3の胸郭スタビライザ。
- 横断方向支持体をプラットフォームに関して移動させる、横断方向支持体に連結したモーターを更に含む請求項1の胸郭スタビライザ。
- プラットフォームに連結した力トランスデューサーにして、患者がプラットフォームに加えた力を表す信号をコントローラーに伝達するようになっており、コントローラーが、力トランスデューサーからの信号と、リトラクトメーターによる胸郭虚脱測定とに基づいて、横断方向支持体が付加する力を設定するようになっている請求項3の胸郭スタビライザ。
- コントローラーがマイクロプロセッサを含み、横断方向支持体が胸壁に付加する力がマイクロプロセッサのアルゴリズムに従い制御される請求項6の胸郭スタビライザ。
- 横断方向支持体が胸壁に付加した力を表す信号をコントローラーに伝達する、横断方向支持体に連結した力センサを更に含む請求項3の胸郭スタビライザ。
- モーターと横断方向支持体との間に連結した伝達機構を更に含む請求項5の胸郭スタビライザ。
- 流体圧システムを更に含み、横断方向支持体が、該流体圧システムに連結され且つ膨張して胸壁に力を付加するようになっている膨張自在の流体充填型部材を含む請求項1の胸郭スタビライザ。
- 流体圧システムがピストンと、プラットフォームと横断方向支持体との間に連結した流体充填型のシリンダとを含み、ピストンが、患者がプラットフォームに力を付加するのに応答して流体充填型のシリンダを圧縮して横断方向支持体の膨張自在の流体充填部材を膨張させるようになっている請求項10の胸郭スタビライザ。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US73072305P | 2005-10-27 | 2005-10-27 | |
| US60/730,723 | 2005-10-27 | ||
| PCT/US2006/040881 WO2007050424A2 (en) | 2005-10-27 | 2006-10-18 | Thoracic stabilizer |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2009513252A JP2009513252A (ja) | 2009-04-02 |
| JP2009513252A5 JP2009513252A5 (ja) | 2010-12-16 |
| JP4896982B2 true JP4896982B2 (ja) | 2012-03-14 |
Family
ID=37968400
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008537795A Active JP4896982B2 (ja) | 2005-10-27 | 2006-10-18 | 胸郭スタビライザ |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US8034011B2 (ja) |
| EP (1) | EP1940301B1 (ja) |
| JP (1) | JP4896982B2 (ja) |
| AT (1) | ATE551985T1 (ja) |
| CA (1) | CA2628117A1 (ja) |
| WO (1) | WO2007050424A2 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB201218336D0 (en) | 2012-10-12 | 2012-11-28 | Univ Oslo Hf | Chest compression device |
| US10143619B2 (en) * | 2013-05-10 | 2018-12-04 | Physio-Control, Inc. | CPR chest compression machine performing prolonged chest compression |
| US11179098B2 (en) | 2015-02-23 | 2021-11-23 | Norman A. Paradis | System for dynamically stabilizing the chest wall after injury, fracture, or operative procedures |
| WO2018081674A1 (en) * | 2016-10-28 | 2018-05-03 | The Penn State Research Foundation | Device and method for assisting breathing in a subject |
| US11234640B2 (en) * | 2017-06-28 | 2022-02-01 | The Nemours Foundation | Non-invasive pulmonary function assessment and treatment of respiratory fatigue |
| US10849820B2 (en) * | 2017-10-23 | 2020-12-01 | Physio-Control, Inc. | CPR chest compression device with lateral support pad |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5575027A (en) * | 1995-04-18 | 1996-11-19 | Mueller; George B. | Method of supporting a chest and abdomen and apparatus therefor |
| US20040116840A1 (en) * | 1997-10-17 | 2004-06-17 | Cantrell Elroy T. | Chest mounted cardio pulmonary resuscitation device and system |
| US20040162587A1 (en) * | 2003-02-14 | 2004-08-19 | Medtronic Physio-Control Corp. | Cooperating defibrillators and external chest compression devices |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5360392A (en) * | 1993-05-14 | 1994-11-01 | Northeast Orthotics & Prosthetics, Inc. | Method of forming a scoliosis brace |
| US5820572A (en) * | 1995-11-21 | 1998-10-13 | The Penn State Research Foundation | Negative pressure chest brace |
| US6533739B1 (en) * | 1995-11-21 | 2003-03-18 | The Penn State Research Foundation | Chest brace and method of using same |
| US6934987B2 (en) * | 2002-03-11 | 2005-08-30 | Hill-Rom Services, Inc. | Surgical table having integral lateral supports |
| SE0302303D0 (sv) * | 2003-08-28 | 2003-08-28 | Oncolog Medical Qa Ab | Patient repositioning device and method |
| TWM345538U (en) * | 2007-11-09 | 2008-12-01 | Apex Medical Corp | Air mattress with rim-protection components |
-
2006
- 2006-10-18 WO PCT/US2006/040881 patent/WO2007050424A2/en active Application Filing
- 2006-10-18 AT AT06826272T patent/ATE551985T1/de active
- 2006-10-18 CA CA002628117A patent/CA2628117A1/en not_active Abandoned
- 2006-10-18 EP EP06826272A patent/EP1940301B1/en active Active
- 2006-10-18 JP JP2008537795A patent/JP4896982B2/ja active Active
- 2006-10-18 US US12/083,253 patent/US8034011B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5575027A (en) * | 1995-04-18 | 1996-11-19 | Mueller; George B. | Method of supporting a chest and abdomen and apparatus therefor |
| US20040116840A1 (en) * | 1997-10-17 | 2004-06-17 | Cantrell Elroy T. | Chest mounted cardio pulmonary resuscitation device and system |
| US20040162587A1 (en) * | 2003-02-14 | 2004-08-19 | Medtronic Physio-Control Corp. | Cooperating defibrillators and external chest compression devices |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2007050424A2 (en) | 2007-05-03 |
| EP1940301B1 (en) | 2012-04-04 |
| US8034011B2 (en) | 2011-10-11 |
| JP2009513252A (ja) | 2009-04-02 |
| EP1940301A4 (en) | 2009-11-04 |
| ATE551985T1 (de) | 2012-04-15 |
| WO2007050424A3 (en) | 2009-04-23 |
| CA2628117A1 (en) | 2007-05-03 |
| EP1940301A2 (en) | 2008-07-09 |
| US20090020129A1 (en) | 2009-01-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11576835B2 (en) | Neonatal chest splint for applying negative distending pressure | |
| US6155976A (en) | Reciprocating movement platform for shifting subject to and fro in headwards-footwards direction | |
| JP4896982B2 (ja) | 胸郭スタビライザ | |
| US8122891B2 (en) | Suction therapy apparatus and method | |
| US20090095297A1 (en) | Automatic Positive Airway Pressure Therapy through the Nose or Mouth for Treatment of Sleep Apnea and Other Respiratory Disorders | |
| JP4391595B2 (ja) | 被験者を頭部・足部方向へ往復状に移動させる往復移動台 | |
| CN108025155A (zh) | 包括具有不同厚度的密封形成结构的患者接口 | |
| JP2011502611A (ja) | 人工呼吸器のトリガ方法 | |
| US6059742A (en) | Negative pressure chest brace | |
| WO2014057116A1 (en) | Chest compression device | |
| Donn et al. | Invasive and noninvasive neonatal mechanical ventilation | |
| WO2001062324A1 (en) | Ambient pressure control ventilation apparatus and method | |
| JP2018519083A (ja) | 可変抵抗気道陽圧デバイス回路補償のための気圧センサ | |
| JP7061064B6 (ja) | 一酸化窒素レベルの富化を制御する装置及び制御する方法 | |
| EP2822624A1 (en) | Positive airway pressure system with head position control | |
| WO2022217767A1 (zh) | 一种用于咳痰辅助的外骨骼机器人及控制方法 | |
| CN107847393B (zh) | 正压脉冲心肺复苏设备 | |
| Nicolai | The physiological basis of respiratory support | |
| Dries et al. | Mechanical ventilation | |
| Diblasi et al. | Non-invasive respiratory support | |
| Venkataraman et al. | Applied Respiratory Physiology of Mechanical Ventilation | |
| Kiger | Neonatal ventilation | |
| Pevernagie | Positive airway pressure therapy | |
| Farre et al. | Noninvasive Ventilation Treatment of Sleep-Related Breathing Disorders | |
| NZ613860B2 (en) | Positive airway pressure system with head position control |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091015 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20091015 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101015 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110927 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111102 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111129 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111221 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 4896982 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150106 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |