JP4757573B2 - Biaxial actuator and holography device using the same - Google Patents
Biaxial actuator and holography device using the same Download PDFInfo
- Publication number
- JP4757573B2 JP4757573B2 JP2005259060A JP2005259060A JP4757573B2 JP 4757573 B2 JP4757573 B2 JP 4757573B2 JP 2005259060 A JP2005259060 A JP 2005259060A JP 2005259060 A JP2005259060 A JP 2005259060A JP 4757573 B2 JP4757573 B2 JP 4757573B2
- Authority
- JP
- Japan
- Prior art keywords
- axis
- movable shaft
- movable
- coil
- magnetic drive
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images









Landscapes
- Holo Graphy (AREA)
- Optical Recording Or Reproduction (AREA)
- Optical Head (AREA)
Description
本発明は、反射ミラーを所望の傾斜角度に設定することにより光記録媒体に対する参照光の入射角度の調整を行う2軸型アクチュエータ及びこれを用いたホログラフィー装置に関する。 The present invention relates to a biaxial actuator that adjusts an incident angle of reference light to an optical recording medium by setting a reflection mirror to a desired tilt angle, and a holography device using the same.
ホログラフィー記録媒体に対して2次元的なデジタル信号を多重に記録しまたは再生する方法としては、前記記録媒体に対する参照光の入射角度又は波長を変えて行う方法が一般的である。 As a method of recording or reproducing a two-dimensional digital signal in a multiplex manner on a holographic recording medium, a method of changing the incident angle or wavelength of reference light on the recording medium is generally used.
従来、このような光ビーム(参照光)の入射角度を調整する手段としてはガルバノミラーが代表的である(例えば、特許文献1)。
上記のようなホログラフィー装置においては、記録位置1箇所当たりの記録容量が大きいため、その読出し時間を可能な限り短くすることが望まれている。そのためには、特に読出しデータが指定されてから前記参照光の入射角度を所望の角度に設定するまでに要する時間(応答時間)、すなわちミラーの角度調整に要する時間を短縮する必要がある。 In the holography apparatus as described above, since the recording capacity per recording position is large, it is desired to shorten the reading time as much as possible. For this purpose, it is particularly necessary to shorten the time (response time) required from setting the read data to setting the incident angle of the reference light to a desired angle, that is, the time required for adjusting the mirror angle.
しかし、上記特許文献1に記載された従来のガルバノミラーでは、ミラーを保持して揺動する可動部の両側面に合計6ヶ(片側面3ヶ×2)の電磁コイルを備えた構成であるため、前記可動部の重量が比較的重い。このため、読出しデータが指定されてから実際に可動部が動き出すまでにある程度の時間を要し、前記ミラーの角度調整を高速で調整することが困難(応答性が鈍い)という問題がある。 However, the conventional galvanometer mirror described in Patent Document 1 has a configuration in which a total of six electromagnetic coils (three on one side × 2) are provided on both side surfaces of the movable portion that holds and swings the mirror. Therefore, the weight of the movable part is relatively heavy. For this reason, there is a problem that it takes a certain amount of time from when the read data is specified until the movable part actually starts to move, and it is difficult to adjust the angle of the mirror at high speed (less responsiveness).
また前記可動部が4本の線ばねを変形して形成された支持バネで支持される構成であり、可動部が回転するときには前記支持バネに弾性変形が生じるようになる。しかしながら、このとき支持バネには前記弾性変形に基づく復元力が左手の法則によって発生した磁気駆動力(駆動トルク)を妨げるように作用する。このため、この点においても応答性を高め難く、しかも適正な駆動力を発生させるためには消費電力が大きくなりやすいという問題がある。 The movable portion is supported by a support spring formed by deforming four wire springs. When the movable portion rotates, the support spring is elastically deformed. However, at this time, the restoring force based on the elastic deformation acts on the support spring so as to prevent the magnetic driving force (driving torque) generated by the left-hand rule. For this reason, also in this respect, there is a problem that it is difficult to increase responsiveness, and power consumption tends to increase in order to generate an appropriate driving force.
さらには、特許文献1に記載されたものでは、前記可動部が線ばねで吊った状態で支持されており、外部衝撃に応じて可動部が振動しやすい構成である。このため、このようなホログラフィー装置は携帯電話機などに搭載される記録装置としては採用され難いという問題もある。 Furthermore, in what was described in patent document 1 , the said movable part is supported in the state hung with the wire spring, and it is the structure which a movable part tends to vibrate according to an external impact. For this reason, there is a problem that such a holography device is difficult to be employed as a recording device mounted on a mobile phone or the like.
本発明は上記従来の課題を解決するためのものであり、磁気駆動部で発生した駆動力を効率よく利用することにより、応答性に優れた2軸型アクチュエータ及びこれを用いたホログラフィー装置を提供することを目的としている。 The present invention is for solving the above-described conventional problems, and provides a biaxial actuator excellent in responsiveness and a holography device using the same by efficiently using a driving force generated in a magnetic driving unit. The purpose is to do.
また本発明は耐衝撃振動に優れ、消費電力の少ない2軸型アクチュエータ及びこれを用いたホログラフィー装置を提供することを目的としている。 Another object of the present invention is to provide a biaxial actuator excellent in shock vibration resistance and low power consumption, and a holography device using the same.
本発明は、 制御対象を支持する可動軸と、直交する第1の軸および第2の軸を中心として前記可動軸を揺動自在に支持する支持機構と、前記可動軸を第1の軸および第2の軸と直交する基準軸と一致する姿勢から傾く姿勢に傾倒させる磁気駆動機構とを有する2軸型アクチュエータにおいて、
前記駆動機構は、基準軸を挟んで第1の方向で対称に配置された一対の第1の磁気駆動部と、基準軸を挟んで第1の方向と直交する第2の方向で対称に配置された一対の第2の磁気駆動部とを有し、
前記駆動機構が、前記可動軸と共に揺動する可動側と前記可動軸を傾倒自在に支持する支持側の一方に設けられた外ヨークおよび他方に設けられた4つのコイルを有しており、
前記外ヨークに、第1の磁気駆動部と第2の磁気駆動部の4箇所の磁気駆動部を構成する4つの穴部が形成されて、それぞれの穴部の内部に磁石と内ヨークとが固定され、それぞれのコイルが前記穴部の内周面と前記内ヨークの外周面との間に位置していることを特徴とするものである。
The present invention includes a movable shaft that supports a controlled object, a support mechanism that swingably supports the movable shaft around a first axis and a second axis that are orthogonal to each other, and the movable shaft that is a first axis and A biaxial actuator having a magnetic drive mechanism that tilts from a posture that coincides with a reference axis orthogonal to the second axis to a posture that tilts ;
The drive mechanism is arranged symmetrically in a second direction perpendicular to the first direction across the reference axis, and a pair of first magnetic drive units arranged symmetrically in the first direction across the reference axis A pair of second magnetic drive units,
The drive mechanism has an outer yoke provided on one of a movable side that swings together with the movable shaft and a support side that tiltably supports the movable shaft, and four coils provided on the other side,
The outer yoke is formed with four holes constituting the four magnetic drive parts of the first magnetic drive part and the second magnetic drive part, and the magnet and the inner yoke are formed in each of the hole parts. The coils are fixed, and each coil is located between the inner peripheral surface of the hole and the outer peripheral surface of the inner yoke .
上記手段では、各磁気回路で発生した電磁力を、効率良く可動軸を傾倒させる駆動力として利用することができる。また、磁気回路をバランスよく配置することができ、磁気回路をまとめて配置することが可能となるため、小型化を促進することができる。In the above means, the electromagnetic force generated in each magnetic circuit can be used as a driving force for efficiently tilting the movable shaft. In addition, the magnetic circuits can be arranged in a well-balanced manner, and the magnetic circuits can be arranged together, so that downsizing can be promoted.
本発明は、前記可動軸が基準軸と一致しているときに、それぞれの穴部の中心軸とそれぞれのコイルの中心軸とが、基準軸と平行な向きに配置されている。あるいは、前記可動軸が基準軸と一致しているときに、それぞれの穴部の中心軸とそれぞれのコイルの中心軸とが、基準軸と直交する向きに配置されている。In the present invention, when the movable shaft coincides with the reference axis, the center axis of each hole and the center axis of each coil are arranged in a direction parallel to the reference axis. Alternatively, when the movable shaft coincides with the reference axis, the center axis of each hole and the center axis of each coil are arranged in a direction orthogonal to the reference axis.
本発明は、前記外ヨークが可動側に配置され、前記コイルが支持側に配置されており、支持側から基準軸に沿って延びるストッパピンが設けられ、このストッパピンが外ヨークに挿入されて、前記可動軸の傾きが規制されているものとして構成できる。In the present invention, the outer yoke is disposed on the movable side, the coil is disposed on the support side, a stopper pin extending from the support side along the reference axis is provided, and the stopper pin is inserted into the outer yoke. The tilt of the movable shaft can be restricted.
前記ストッパによって、前記コイルと前記磁石が当たらないように、前記可動軸の傾きを規制することができる。The stopper can restrict the inclination of the movable shaft so that the coil and the magnet do not hit each other.
本発明は、例えば、前記支持機構が、前記可動軸を前記第1の軸回りに揺動自在に支持する可動リングと、前記可動リングを前記第2の軸回りに揺動自在支持する固定ベースと、を有するものとして構成することができる。
上記手段では、制御対象を有する可動軸を確実に2軸方向に傾倒させることができる。
The present invention provides, for example, a movable ring that supports the movable shaft so as to be swingable about the first axis, and a fixed base that supports the movable ring so as to be swingable about the second axis. And it can comprise as what has.
In the above means, the movable shaft having the control target can be reliably tilted in the biaxial direction.
また前記支持機構は、前記可動軸と前記可動リングとの間、および前記可動リングと固定ベースとの間に互いの回転を許容する小球またはピンを有するものとして構成したものが好ましい。 Further, the support mechanism is preferably configured to have a small ball or a pin that allows mutual rotation between the movable shaft and the movable ring and between the movable ring and the fixed base.
上記手段では、回転中心を支持機構の支持中心点に固定化することができるため、例えば衝撃や振動などが加わった場合でも前記支持中心点のずれが少なく、耐衝撃振動性に優れたアクチュエータとすることができる。 In the above means, the rotation center can be fixed to the support center point of the support mechanism, and therefore, for example, even when an impact or vibration is applied, the support center point is less displaced and the actuator has excellent shock vibration resistance. can do.
本発明のホログラフィー装置は、少なくとも所定のレーザ光を射出する光源と、前記レーザ光を平行光に変換するコリメータレンズと、前記いずれかに記載の2軸型アクチュエータと、前記2軸型アクチュエータの可動軸の他端に設けられ且つ前記平行光を参照光として光記録媒体に向けて反射する反射ミラーと、前記光記録媒体から出力される回折光を検知する光検知器と、が設けられていることを特徴とするものである。 A holography device according to the present invention includes at least a light source that emits a predetermined laser beam, a collimator lens that converts the laser beam into parallel light, the biaxial actuator described above, and the movable biaxial actuator. A reflection mirror provided at the other end of the shaft and reflecting toward the optical recording medium using the parallel light as reference light, and a photodetector for detecting diffracted light output from the optical recording medium are provided. It is characterized by this.
本発明のホログラフィー装置では、反射ミラーを素早く2軸方向に傾斜させることができる。 In the holography device of the present invention, the reflecting mirror can be quickly tilted in the biaxial direction.
上記において、前記反射ミラーは、前記基準軸に対する反射ミラーのなす角度θが0度<θ<90度の範囲で予め傾斜させられているものが好ましい。 Oite above, the reflecting mirror, the angle theta of the reflecting mirror with respect to the reference axis is 0 degrees <theta <is preferable which is previously inclined in a range of 90 degrees.
上記手段では、ホログラフィー装置自体の高さ寸法を低く抑えることができる。このため、ホログラフィー装置を搭載した機器の小型化、薄型化を促進させることができる。 With the above means, the height dimension of the holographic device itself can be kept low. For this reason, it is possible to promote downsizing and thinning of a device equipped with a holography device.
本発明では、磁気駆動部で発生した電磁力を駆動力に効率よく変換して利用することができる。このため、低消費電力で且つ応答性に優れた2軸型アクチュエータを提供することができる。 In the present invention, the electromagnetic force generated by the magnetic drive unit can be efficiently converted into a drive force for use. Therefore, it is possible to provide a biaxial actuator that has low power consumption and excellent responsiveness.
また本発明は、回転中心を支持機構の支持中心点に固定化することができるため、例えば衝撃や振動などが加わった場合でも前記支持中心点のずれが少ない2軸型アクチュエータを提供することができる。 Further, the present invention can fix the rotation center to the support center point of the support mechanism, and therefore, it is possible to provide a biaxial actuator in which the shift of the support center point is small even when, for example, impact or vibration is applied. it can.
図1は本発明の実施の形態として反射ミラーを備えた2軸型アクチュエータを示す斜視図、図2は図1の分解斜視図、図3は支持機構の構成を示す分解斜視図、図4は磁気駆動部を構成する固定部材側の一例を示す分解斜視図、図5は磁気駆動部を構成する外ヨークを示す分解斜視図である。 1 is a perspective view showing a biaxial actuator provided with a reflecting mirror as an embodiment of the present invention, FIG. 2 is an exploded perspective view of FIG. 1, FIG. 3 is an exploded perspective view showing the structure of a support mechanism, and FIG. FIG. 5 is an exploded perspective view showing an example of a fixing member side constituting the magnetic drive unit, and FIG. 5 is an exploded perspective view showing an outer yoke constituting the magnetic drive unit.
本発明のアクチュエータ10Aは、図1及び図2に示すように大きく分けて制御対象(被制御機構)20、支持機構30および磁気駆動機構40の3つの部材から構成されている。以下、各機構ごとに詳述する。
As shown in FIGS. 1 and 2, the
制御対象20は反射ミラー21とミラー支持部22とを有している。前記反射ミラー21は例えば全反射型のミラーであり、図示Z1側から所定の角度で入射した光は同じ角度で射出させられるようになっている。また反射ミラーの傾き角度を変えることにより、反射光の射出方向を調整できるようになっている。
The
前記ミラー支持部22は、断面L字形状からなる支持板22aからなり、その背面(図示Z2側の面)にはZ2方向に突出する可動軸22bが固設されている。前記反射ミラー21はその背面21bを支持板22a上に載置させた状態で接着剤などを介して固定されている。前記可動軸22bの表面には、所定の曲率で凹状に湾曲形成された一対の第1の凹部22c,22cが形成されている。前記第1の凹部22c,22cは前記可動軸22bの表面で且つ互いに対称となる位置(180度異なる位置)に形成されている。
The
支持機構30は、固定ベース31、可動リング32および複数の小球33,34を有している。固定ベース31は、中央部に大きく貫通する円形状の開口部31aが形成された板状の部材であり、そのX方向の両端には凸状に形成された固定部31b,31bが設けられている。
The
前記可動リング32は前記開口部31aの内径寸法よりも小さな外径寸法を有し、且つ前記ミラー支持部22の可動軸22bの外径寸法よりも大きな内径寸法を有するリング状の部材で形成されている。そして、前記可動リング32の内周面上には、前記第1の凹部22c,22cに対向する第2の凹部32a,32aが形成されている。また前記可動リング32の外周面上で、且つ前記第2の凹部32a,32aと円周方向に沿って90度異なる位置には第3の凹部32b,32bが形成されている。また固定ベース31の開口部31aの内周面には、前記第3の凹部32b,32bに対向する第4の凹部31c,31cが形成されている。
The
前記可動軸22bは前記可動リング32の内部に挿入されており、このとき対向する第1の凹部22c,22cと第2の凹部32a,32aとの間には自在に回転する小球33,33が設けられる。このため、前記可動軸22bと前記可動リング32とは、前記小球33と小球33を結ぶ仮想軸P1−P2(第1の軸)の軸回りにおいて相対的に図示α1およびα2方向に揺動自在な関係で保持されている。
The
また前記可動リング32は前記固定ベース31の前記開口部31aの内部に設けられており、このとき対向する第3の凹部32b,32bと第4の凹部31c,31cとの間には自在に回転する小球34,34が設けられる。このため、前記可動リング32と前記固定ベース31とは、前記小球34と小球34を結ぶ仮想軸Q−Q(第2の軸)の軸回りに相対的に図示β1およびβ2方向に揺動自在な関係で保持されている。なお、前記可動軸22bの回転軸(仮想軸P1−P2(第1の軸))と可動リング32の回転軸(仮想軸Q−Q(第2の軸))との交点が回転中心(支持機構の支持中心点)Oである。
The
すなわち、前記第1の凹部22c,22cと第2の凹部32a,32aとが第1の軸受部(内側軸受部)を形成し、前記第3の凹部32b,32bと第4の凹部31c,31cとが第2の軸受部(外側軸受部)を形成している。このため、前記可動軸22bは、第1の軸受部(内側軸受部)及び第2の軸受部(外側軸受部)とにより、前記仮想軸P1−P2(第1の軸)及びこれと直交する前記仮想軸Q−Q(第2の軸)の2軸に対し揺動自在に保持されている。したがって、前記可動軸22bは、その姿勢を前記支持中心点Oを通るZ軸(第3の軸;基準軸)に対し、360度の範囲に亘って自在に傾倒させることが可能とされている。
That is, the first
磁気駆動機構40は主として固定部材41と外ヨーク46とを有している。
図4に示すように、固定部材41は、略コの字形状からなる金属板などで形成されている。固定部材41の図示Z2方向の底面41Aには円形状の薄肉部41a,41a,41a,41aが形成されており、これら4つの薄肉部41aの配列中心にはZ方向に貫通する貫通孔41bが穿設されている。前記貫通孔41bには図示Z2側からZ1方向に延びる棒状のストッパピン43が挿通されている。
The
As shown in FIG. 4, the fixing
また底面41Aの両端には図示Z1方向に連続的に延びる側壁部41B,41Bが設けられている。そして、この側壁部41B,41Bの先端には、図示X方向に貫通するとともにY方向に延びる長穴41c,41cが形成されている。この長穴41c,41cには、前記固定ベース31に形成された固定部31b,31bが嵌合可能とされている。すなわち、前記固定ベース31は固定部材41に支持される。
Further,
前記4つの薄肉部41aには、コイル42(個別に42A,42B,42C,42Dで示す。)がそれぞれ装着されている。各コイル42は、例えば熱融着可能な樹脂で覆われた被覆線材を、所定の外形寸法からなるボビン(芯材)の外周に所定回数巻き付けてコイル状に成形するとともに、このコイル状のものを高温度環境下に置くことによって前記樹脂を溶かして各線材間を固定し、常温に戻した後に前記ボビンを引き抜くことにより形成された空心コイルである。
Coils 42 (indicated by 42A, 42B, 42C, and 42D, respectively) are attached to the four
前記ストッパピン43を挟んで対称の位置に設けられた2つのコイル42は一本の線材で形成されている。すなわち、前記仮想軸P1−P2(第1の軸)に沿う方向に並ぶコイル42Aとコイル42Cとは一本の線材で形成されることにより直列接続されており、同じく前記仮想軸Q−Q(第2の軸)に沿う方向に並ぶコイル42Bとコイル42Dとが直列接続されている。
The two coils 42 provided at symmetrical positions with the
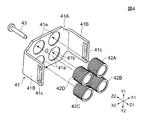
図5に示すように前記外ヨーク46は、フェライトなどのFe系の金属磁性材料で形成されており、図示Z1方向に開口して凹設(凹状に陥没形成)された穴部47(個別に47A,47B,47C,47Dで示す。)がそれぞれ設けられている。そして、個々の穴部47の底面中央には略円柱形状の磁石Mと内ヨーク48の端面どうしがZ方向に連結された状態でそれぞれ固定されている(図6参照)。
As shown in FIG. 5, the
前記4つの穴部47の内径寸法は前記4つのコイル42の外形寸法よりも大きく形成されて、且つ各磁石Mと内ヨーク48の外形寸法は前記4つのコイル42の内形寸法よりも小さく形成されている。そして、前記磁石M及び内ヨーク48の側面(外周面)と穴部47の内周面との間には所定の隙間余裕からなるギャップGがそれぞれ形成されており、4つのコイル42A,42B,42C,42Dは各ギャップG内に挿入されている(図6参照)。各コイル42の内周面と各磁石Mと内ヨーク48の外周面との間、および各コイル42の外周面と各穴部47の内周壁面との間にもそれぞれ隙間余裕が形成されている。よって、後述するように外ヨーク46がZ方向に対して傾斜すると、各コイル42は前記ギャップG内を軸方向(Z方向)および平面(X−Y方向)方向に相対的に移動できるようになっている。
The inner diameter of the four
図2及び図4に示すように、前記外ヨーク46の4つの穴部47A,47B,47C,47Dの中心には、前記ストッパピン43が挿入される貫通孔46aが穿設されている。
As shown in FIGS. 2 and 4, a through
図6に示すように、前記外ヨーク46の底面(Z1側の面)で、且つ前記貫通孔46aの周囲には図示Z1方向に突出する嵌合凸部46bが一体に形成されている。そして、この嵌合凸部46bと前記ミラー支持部22に形成された可動軸22bとは、これらの間に支持機構30を介在させて嵌合されている。
As shown in FIG. 6, a fitting
図2に示すように、前記固定部材41に形成された長穴41c,41cには、前記固定ベース31の両側である固定部31b,31bが嵌合固定される。また前記ミラー支持部22と外ヨーク46とは前記可動軸22bと嵌合凸部46bとを介して連結されており、前記可動軸22bの周囲は前記固定ベース31内に揺動自在に設けられた可動リング32に対し揺動自在に保持されている。
As shown in FIG. 2, fixing
このため、後述するような駆動力が作用すると、前記回転中心(支持中心点)Oを通るZ軸(第3の軸)に対して前記ミラー支持部22と外ヨーク46とがX−Yの平面方向に一体的に傾倒させられるようになっている。
Therefore, when a driving force as will be described later is applied, the
なお、上記外ヨーク46のZ軸(第3の軸)に対する傾斜角度が大きくなると、前記コイル42の外周面が穴部47の内周壁面に当接し、またはコイル42の内周面に各磁石Mと内ヨーク48の外周面が当接して損傷する可能性が想定される。このため、このような当接が生じる前に、前記ストッパピン43を前記貫通孔46aに当接させるように設定されており、前記外ヨーク46の傾斜角度は所定の範囲内に収まるように制限されている。よって、各コイル42の外周面と各穴部47の内周壁面との間の損傷、および各コイル42の内周面と各磁石Mと内ヨーク48の外周面との間の損傷について、未然に防止することが可能とされている。
When the inclination angle of the
次に、上記2軸型アクチュエータの動作について説明する。
図6は本発明の第1の実施の形態としての2軸型アクチュエータの動作を説明するための磁気駆動部の断面図であり、例えば仮想軸P1−P2(第1の軸)における断面を示すものである。なお、図6では支持機構30を省略して示している。
Next, the operation of the biaxial actuator will be described.
FIG. 6 is a cross-sectional view of the magnetic drive unit for explaining the operation of the biaxial actuator according to the first embodiment of the present invention, for example, showing a cross section along a virtual axis P1-P2 (first axis). Is. In FIG. 6, the
図6に示すように、例えば、穴部47A内の磁石M1はS極側の端面をZ1方向の向けた状態で穴部47Aの底面(外ヨーク部材の底部)に固着されている。そして、他方のN極側の端面に内ヨーク48の端面が固着されている。このため、磁束Bは、磁石MのN極→内ヨーク→ギャップG(コイル42A)→外ヨークの外側の側壁→外ヨークの底部→磁石MのS極という経路からなる磁気回路(磁路)を形成する。
As shown in FIG. 6, for example, the magnet M1 in the
また穴部47C内の磁石M2はN極側の端面をZ1方向の向けた状態で穴部47Cの底面(外ヨーク部材の底部)に固着されている。そして、他方のS極側の端面に内ヨーク48の端面が固着されている。このため、磁束Bは、磁石M2のN極→外ヨークの底部→外ヨークの外側の側壁→ギャップG(コイル42C)→内ヨーク→磁石M2のS極という経路からなる磁気回路(磁路)を形成する。
The magnet M2 in the
前記ギャップG内では、磁束Bの方向とコイルの巻き方向とが直交している。このため、互いに直列接続されている前記コイル42Aとコイル42Cに所定の電流Iを流すと、磁束Bと電流Iとの作用による電磁力を前記電流Iの方向に応じてそれぞれ発生させることができる。
In the gap G, the direction of the magnetic flux B and the winding direction of the coil are orthogonal. Therefore, when a predetermined current I is passed through the
すなわち、図6にて矢印A1方向から見たときに、前記コイル42Aに対して時計回り方向の電流Iを流し、且つコイル42Cに対しても時計回り方向の電流Iを流すと、前記コイル42Aに作用する電磁力F1’は図示Z2方向となり、前記コイル42Cに作用する電磁力F2’は図示Z1方向となる。
That is, when viewed in the direction of arrow A1 in FIG. 6, if a clockwise current I is passed through the
前記コイル42A及び42Cは、固定部材41の底面41Aの薄肉部41a,41a内に固定されているため、コイル42A及び42C自体は移動することができない状態にある。このため、図6に示すようにコイル42Aには電磁力F1’の反作用としての力F1が前記内ヨーク48及び磁石M1を介して図示Z1方向に作用し、コイル42Cには電磁力F2’の反作用として力F2が前記内ヨーク48及び磁石M2を介して図示Z1方向に作用する。
Since the
すなわち、コイル42Aとコイル42Cには互いに逆向きの力F1,F2を作用させることができる。そして、前記力F1の成分である駆動力F1aと前記力F2の成分である駆動力F2aとは支持中心点Oを中心とする同一半径Lからなる円の接線方向に作用するため、前記外ヨーク46を図6にて時計回り方向(仮想軸Q−Q(第2の軸)回りβ1方向)に傾倒させることが可能である。なお、このときの駆動トルクTは、T=F1a・L+F2a・L=2・Fa・L(ただし、F1a=F2a=Faとする。)と表すことができる。
That is, opposite forces F1 and F2 can be applied to the
上記のように、前記コイル42A、穴部47A、磁石M1および内ヨーク48が1つの磁気回路を形成し、前記コイル42C、穴部47C、磁石M2および内ヨーク48が他の1つの磁気回路を形成している。そして、このような一対の磁気回路が、前記外ヨーク46をβ1およびβ2方向に回転させる第1の磁気駆動部を形成している。
As described above, the
また電流Iの向きを上記の例とは逆向き(矢印A1方向から見て反時計回り方向)にすると、前記外ヨーク46を図6にて反時計回り方向(仮想軸Q−Q(第2の軸)回りβ2方向)に傾倒させることができる。
Further, when the direction of the current I is opposite to the above example (counterclockwise direction when viewed from the direction of the arrow A1), the
このように、前記電流Iの方向を変えることにより、前記可動軸22bを回転中心(支持中心点)Oとする時計回り方向(β1方向)および反時計回り方向(β2方向)に揺動させることが可能とされている。
In this way, by changing the direction of the current I, the
上記の関係は、前記穴部47B内に設けられているコイル42Bと前記穴部47D内に設けられているコイル42Dとからなる磁気回路においても同様である。すなわち、前記コイル42B及びコイル42Dに流れる電流Iの方向を変えることにより、前記可動軸22bを回転中心(支持中心点)Oとする仮想軸Q−Q(第2の軸)回りに、つまり図2においてα1方向およびα2方向にそれぞれ揺動させることが可能である。
The above relationship is the same in the magnetic circuit including the
そして、この場合には前記コイル42B、穴部47B、磁石M1および内ヨーク48が1つの磁気回路を形成し、コイル42D、穴部47D、磁石M2および内ヨーク48が他の1つの磁気回路を形成している。そして、これら一対の磁気回路が、前記外ヨーク46をα1およびα2方向に回転させる第2の磁気駆動部を形成している。
In this case, the
このため、上記第1の磁気駆動部及びこれと直交する方向に配置された第2の磁気駆動部を用いることにより、前記外ヨーク46の嵌合凸部46bを介して連結されている可動軸22bを前記Z軸(第3の軸;基準軸)と一致する姿勢から傾く姿勢に傾倒させることができる。よって、この可動軸22bを備えた制御対象20、すなわち反射ミラー21を2軸方向に自在に傾倒させることが可能である。
For this reason, the movable shaft connected via the fitting
なお、本実施の形態では、前記可動軸22bのZ1側の一端に前記制御対象としての反射ミラー21が設け、Z2側の他端に前記第1及び第2の磁気駆動部からなる磁気駆動機構が設けた構成であるところ、前記支持機構の支持中心点Oが前記制御対象と前記磁気駆動機構とを接続する前記可動軸22b上の重心近傍となるように設定している。このため、上記2軸型アクチュエータ10は、アクチュエータとしてのバランス性に優れ、無理なく駆動することが可能となっている。
In the present embodiment, a
次に、本願発明の第2の実施の形態について説明する。
図7は第2の実施の形態の2軸型アクチュエータの動作を説明するための図6同様の断面図である。
Next, a second embodiment of the present invention will be described.
FIG. 7 is a cross-sectional view similar to FIG. 6 for explaining the operation of the biaxial actuator according to the second embodiment .
第2の実施の形態と第1の実施の形態とは、主として磁気駆動機構40が相違している。すなわち、上記第1の実施の形態はMM型(Moving Magnet type)であるのに対し、第2の実施の形態の2軸型アクチュエータはいわゆるMC型(Moving Coil type)である点で相違している。ただし、前記制御対象20と支持機構30の構成は、第1および第2の実施の形態ともに共通である。なお、図7では支持機構30を図6同様に省略している。
The
図7に示すように、第2の実施の形態の2軸型アクチュエータ10Bでは、可動軸22bの先端に平板状の可動ベース51が連結されている。前記可動ベース51のZ2側の面には上記第1の実施の形態と同様の構成からなる4つの空心型のコイル42A,42B,42Cおよび42Dがそれぞれ開口端をZ方向に向けた状態で固定されている。なお、図7ではコイル42A,42Cのみ図示し、コイル42B,42Dは省略している。
As shown in FIG. 7, in the
また上記同様の構成からなる外ヨーク46が、上記固定部材41に固定されている。すなわち、外ヨーク46は4つの穴部47(個別に47A,47B,47C,47Dで示す。)を有し、個々の穴部47の底面中央には略円柱形状の磁石Mと内ヨーク48の端面どうしがZ方向に連結された状態でそれぞれ固定されている。また磁石M及び内ヨーク48の側面(外周面)と穴部47の内周面との間にはギャップGがそれぞれ形成されており、前記4つのコイル42A,42B,42C,42Dは各ギャップG内に所定の可動余裕を有して配置されている。
An
この場合においてもコイル42A、穴部47A、磁石M1および内ヨーク48からなる1つの磁気回路と、コイル42C、穴部47C、磁石M2および内ヨーク48からなる他の1つの磁気回路が第1の磁気駆動部を形成し、コイル42B、穴部47B、磁石M1および内ヨーク48からなる1つの磁気回路と、コイル42D、穴部47D、磁石M2および内ヨーク48からなる他の1つの磁気回路が第2の磁気駆動部を形成することができる。
In this case as well, one magnetic circuit composed of the
そして、前記第1の磁気駆動部を構成するコイル42A,42Cに所定方向の電流Iを与えると、コイル42Aとコイル42Cにそれぞれ逆向きの電磁力F1(Z1方向),F2(Z2方向)を発生させることができ、また電流Iの向きを変えると逆方向に作用する電磁力を発生させることができる。よって、可動ベース51に固定されている可動軸22bを上記同様に回転中心(支持中心点)Oに対して時計回り方向(β1方向)または反時計回り(β2方向)に揺動させることができる。
When a current I in a predetermined direction is applied to the
また同様に前記第2の磁気駆動部を構成するコイル42B,42Dに所定方向の電流Iを与えると、コイル42Bとコイル42Dにそれぞれ逆向きの電磁力F1(Z1方向),F2(Z2方向)を発生させることができ、また電流Iの向きを変えると逆方向に作用する電磁力を発生させることができる。このため、可動ベース51に固定されている可動軸22bを回転中心(支持中心点)Oに対して時計回り方向(α1方向)または反時計回り(α2方向)に揺動させることができる。
Similarly, when a current I in a predetermined direction is applied to the
このため、第2の実施の形態の2軸型アクチュエータ10Bにおいても、制御対象20を2軸方向に自在に傾倒させることができる。
For this reason, also in the
図8は第3の実施の形態の2軸型アクチュエータの動作を説明するための図6同様の断面図である。 FIG. 8 is a cross-sectional view similar to FIG. 6 for explaining the operation of the biaxial actuator of the third embodiment .
第3の実施の形態の2軸型アクチュエータ10Cは、上記第1の実施の形態と同様のMM型(Moving Magnet type)のアクチュエータである。ただし、第3の実施の形態では、主として外ヨーク56および4つのコイル52A,52B,52Cおよび52Dの配置関係が上記第1の実施の形態と異なっている。なお、前記制御対象20及び支持機構30の構成は第1および第2の実施の形態の場合と同様である。
The
2軸型アクチュエータ10Cの外ヨーク56も4つの穴部57A,57B,57C,7Dを有している。ただし、その開口方向は支持中心点Oを通るZ軸(第3の軸)に対し互いに90度異なる方向である。例えば穴部57Aと穴部57Cは支持中心点Oを通るZ軸に対して180度異なる位置に設けられ、ともに仮想軸P1−P2(第1の軸)に沿う方向に開口形成されている。また穴部57Bと穴部57Dは支持中心点Oを通るZ軸に対して180度異なる位置に設けられ、ともに仮想軸Q−Q(第2の軸)に沿う方向に開口形成されている。なお、図2に示すように、仮想軸P1−P2(第1の軸)と仮想軸Q−Q(第2の軸)の関係は互いに直交し且つZ軸(第3の軸)にも直交している。
The outer yoke 56 of the
外ヨーク56のZ1側の面には嵌合凸部56bが突出形成されており、この嵌合凸部56bの外周に前記可動軸22bの端部が連結嵌合されている。また可動軸22bは、上記同様の固定部材41に固定された支持機構30によって揺動自在に支持されている。
A fitting
前記各穴部57Aないし57D内には略円柱形状の磁石M及び内ヨーク48が互いの端面どうしを連結させるとともに前記磁石Mの端面が各穴部57の底面の中央部に固着させられている。そして、磁石M及び内ヨーク48の側面(外周面)と穴部57の内周面との間にはギャップGがそれぞれ形成されている。
In each of the
一方、固定部材41は支持中心点Oを通るZ軸(第3の軸)を中心として対向し合う四つの側壁部41Bを有している。前記四つの側壁部41Bには、4つのコイル52A,52B,52Cおよび52Dが、その開口方向が支持中心点Oを通るZ軸(第3の軸)に対して直交するように各側壁部41Bにそれぞれ固設されている。そして、前記4つのコイル52A,52B,52C,52Dは各穴部57A,57B,57C,7Dに設けられた前記ギャップG内に所定の可動余裕を有して配置されている。
On the other hand, the fixing
磁石Mの磁化の状態として、例えば支持中心点Oを通るZ軸(第3の軸)側をS極、側壁部41B側をN極にすると、前記磁気駆動機構40内には各磁束Bが各コイル52A,52B,52C,52Dを垂直に交鎖する図8に示すような磁気回路(磁路)をそれぞれ形成することができる。
As the magnetization state of the magnet M, for example, when the Z-axis (third axis) side passing through the support center point O is the S pole and the
このため、前記各コイル52A,52B,52Cおよび52Dに所定方向の電流Iを与えると、コイル52Aとコイル52Cにはそれぞれ同一方向の電磁力F1,F2(図8ではP1方向)を発生させることができる。なお、前記各コイル52A,52B,52Cおよび52Dに与える電流Iの向きを逆方向にすると、前記電磁力F1,F2の方向を逆方向(P2方向)とすることが可能である。
For this reason, when a current I in a predetermined direction is applied to the
ここで、前記コイル52A、穴部57A、磁石M1および内ヨーク58が1つの磁気回路を形成し、コイル52C、穴部57C、磁石M2および内ヨーク58が他の1つの磁気回路を形成している。そして、前記1つの磁気回路と前記他の1つの磁気回路とが、前記外ヨーク56をβ1およびβ2方向に回転させる第1の磁気駆動部を形成している。
Here, the
同様に前記コイル52B、穴部57B、磁石M1および内ヨーク58が1つの磁気回路を形成し、コイル52D、穴部57D、磁石M2および内ヨーク58が他の1つの磁気回路を形成している。そして、前記1つの磁気回路と前記他の1つの磁気回路とが、前記外ヨーク56をα1およびα2方向に回転させる第2の磁気駆動部を形成している。 Similarly, the coil 52B, the hole 57B, the magnet M1 and the inner yoke 58 form one magnetic circuit, and the coil 52D, the hole 57D, the magnet M2 and the inner yoke 58 form another one magnetic circuit. . The one magnetic circuit and the other magnetic circuit form a second magnetic drive unit that rotates the outer yoke 56 in the α1 and α2 directions.
前記第1の磁気駆動部および第2の磁気駆動部で発生する電磁力F1、F2は、図8に示すように、前記支持中心点Oを中心とする円の接線方向の成分F1a,F2aと半径方向の成分F1b,F2bにそれぞれ分解することができる。このうち、可動軸22bを傾倒させる駆動力として寄与する成分は、接線方向の成分F1aとF1bである。前記接線方向の成分F1a,F2aの大きさは、半径方向の成分F1b,F2bの大きさよりも大きい(|F1a|>|F1b|,|F2a|>|F2b|)。
As shown in FIG. 8, the electromagnetic forces F1 and F2 generated in the first magnetic drive unit and the second magnetic drive unit are components tangential to a circle F1a and F2a centered on the support center point O, as shown in FIG. Each can be decomposed into radial components F1b and F2b. Among these, the components that contribute to the driving force for tilting the
一方、上記第1と第2の実施の形態では、これとは逆に接線方向の成分F1a,F2aの大きさは、半径方向の成分F1b,F2bの大きさよりも小さな関係にある(|F1a|<|F1b|,|F2a|<|F2b|)。 On the other hand, in the first and second embodiments , conversely, the magnitudes of the tangential components F1a and F2a are smaller than the magnitudes of the radial components F1b and F2b (| F1a | <| F1b |, | F2a | <| F2b |).
よって、第3の実施の形態では、上記実施の形態および参考例に比較して第1及び第2の磁気駆動部で発生する電磁力F1,F2を、可動軸22bを揺動させるための駆動力F1a,F2aとして効率良く利用することが可能である。
Therefore, in the third embodiment, the electromagnetic forces F1 and F2 generated in the first and second magnetic drive units are driven to swing the
すなわち、低消費電力で同様の駆動力F1a,F2aを得ることができる。あるいは同じ消費電力であればより大きな駆動力F1a,F2aを発生させることができるため、アクチュエータとしての応答性を向上させることができる。 That is, similar driving forces F1a and F2a can be obtained with low power consumption. Alternatively, since the larger driving forces F1a and F2a can be generated with the same power consumption, the response as an actuator can be improved.
上記第1の実施の形態ないし第3の実施の形態の2軸型アクチュエータにおいては、互いに直交するように配置された第1の磁気駆動部と第2の磁気駆動部を有しているため、駆動軸22bを2軸方向に自在に傾けることができる。
Since in the above-described biaxial actuator of the first embodiment to the third embodiment, having a first magnetic drive portion and the second magnetic drive which is arranged so as to be perpendicular to each other, The
すなわち、上記第1の磁気駆動部を構成するコイル42Aとコイル42Cおよび上記第2の磁気駆動部を構成するコイル42Bとコイル42Dに流す電流Iのそれぞれの向きおよび大きさを制御することにより、前記制御対象20を所望の角度に設定することができる。このため、前記制御対象20を構成するミラー支持部22に固定された反射ミラー21の傾き角度を自在に調整することが可能である。
That is, by controlling the direction and magnitude of each of the currents I flowing through the
次に、上記2軸型アクチュエータを利用したホログラフィー装置について説明する。
図9はホログラフィー装置を構成する各部材の配置関係の概略を示す斜視図、図10は図9の矢印方向から見た場合に相当する正面図である。
Next, a holography device using the biaxial actuator will be described.
FIG. 9 is a perspective view showing an outline of the arrangement relation of each member constituting the holography device, and FIG.
図9に示すホログラフィー装置は、例えば光記録媒体再生装置に搭載されるものである。ただし、再生専用の装置に限るものではなく、記録専用の装置、あるいは記録再生装置に搭載されるものであってもよい。 The holographic device shown in FIG. 9 is mounted on, for example, an optical recording medium reproducing device. However, the apparatus is not limited to a reproduction-only apparatus, and may be a recording-only apparatus or a recording / reproducing apparatus.
図9に示すホログラフィー装置は、主として光源61、コリメートレンズ62、反射ミラー21、アクチュエータ10、開口フィルタ64および光検知器65などからなる光学系のシステムで構成されている。
The holography apparatus shown in FIG. 9 is mainly composed of an optical system composed of a
前記光源61は、例えば垂直共振器面発光レーザ(以下、「VCSEL(Vertical Cavity Surface Emitting Laser)という」などからなるレーザ発光手段で構成されている。
The
前記コリメートレンズ62および反射ミラー21は、前記光源61から射出されるレーザ光の光路上に設けられている。前記反射ミラー21は上記いずれかのアクチュエータ10に設けられており、2軸方向に揺動自在に支持されている。前記アクチュエータ10と反射ミラー21とにより、いわゆるガルバノミラーが構成されている。
The collimating
前記コリメートレンズ62は、前記光源61と反射ミラー21との間に設けられている。前記コリメートレンズ62は前記光源61から入射したレーザ光(発散光)L1を平行な光からなる参照光L2に変換するものであり、前記参照光L2は反射ミラー21に向けて出力されるようになっている。
The
前記コリメートレンズ62で平行な光に変換された前記参照光L2は、前記反射ミラー13において反射させられ、参照光L3として光記録媒体70上の所定の位置を照光する。
The reference light L2 converted into parallel light by the
このとき、前記アクチュエータ10は前記反射ミラー21によって反射させられた前記参照光L2が、前記光記録媒体70上の所定の位置を照光することができるように角度調整される。このような、反射ミラー21の角度調整は上述のように第1の磁気駆動部および第2の磁気駆動部を形成する4つのコイルに所定の向き及び大きさからなる電流Iを与えることにより行うことができる。
At this time, the angle of the
このため、前記反射ミラー13から出力された前記参照光L3は反射層72において反射させられ、光記録媒体70の外部に再生光L4として出力される。
For this reason, the reference light L3 output from the reflection mirror 13 is reflected by the
この実施の形態に示す光記録媒体70はいわゆる反射型記録媒体であり、干渉縞を記録することが可能な記録層71の下部に反射層72を有する構成である。なお、前記記録層71内には多数のデータ情報を示すホログラムが、干渉縞(市松模様状の2次元的なドットパターン)として記録角度を変えた状態で多重に記録されている。このため、前記再生光L4には前記干渉縞によるデータ情報が含まれている。
The
前記開口フィルタ64と前記光検知器65は、前記光記録媒体70から出力される前記再生光L4の光路上に設けられている。前記開口フィルタ64は前記再生光L4から不要な光を排除するものである。
The
前記光検知器65としては、例えばCCDやCMOSイメージセンサなどを用いることが可能である。前記再生光L4が所定の入射角θで前記光検知器65に照光されると、前記光検知器65は前記再生光L4に含まれる多数のデータ情報のうち、前記入射角θと前記再生光L4の波長λとによる関係が所定のブラック条件式に合致する位置に記録されたデータ情報のみを読み出すことが可能とされている。
As the
そして、前記アクチュエータ10を駆動させ、前記反射ミラー21の角度を微調整することにより、光記録媒体70に入射する参照光L3の入射角θを変えることができるため、前記光記録媒体70の記録層71に多重に記録されている個々のデータ情報をそれぞれ読み出すことが可能できる。
Then, by driving the
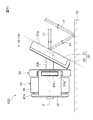
図11は、他の軸型アクチュエータを示す側面図である。
上記図9及び図10に示すホログラフィー装置では、コリメートレンズ62から射出された参照光L2は光記録媒体70に対して水平である。前記反射ミラー21では、この水平な参照光L2が光記録媒体70に入射するときに所定の入射角度θとなるように前記反射ミラー21の傾き角度を下向きとする必要がある。前記傾き角度がアクチュエータ10の調整範囲を超える場合があり、この場合には図9及び図10に示すように、あらかじめアクチュエータ10自体を所定の傾斜姿勢で光記録媒体再生装置の内部に取り付けておくことが必要となる。
FIG. 11 is a side view showing another shaft type actuator.
In the holography apparatus shown in FIGS. 9 and 10, the reference light L <b> 2 emitted from the
しかし、あらかじめアクチュエータ10自体を所定の傾斜姿勢で光記録媒体再生装置の内部に取り付けておくと、アクチュエータ10を構成する固定部材41の底面41A側が持ち上がり、ホログラフィー装置としての全体の高さ寸法が高くなって薄型化し難いという問題が発生する。
However, if the
このような場合には、例えば図11に示す2軸アクチュエータ10Dのように、あらかじめ可動軸22bの先端に反射ミラー(制御対象)21を傾斜姿勢で取り付けた構成としたものが好ましい。なお、この場合における前記反射ミラー(制御対象)21の傾斜姿勢は、前記可動軸22bの前記支持中心点Oを通るZ軸(第3の軸;基準軸)と反射ミラー21の表面21aとのなす角θが0度<θ<90度の範囲となるように設定されている。
In such a case, for example, a configuration in which a reflection mirror (control target) 21 is previously attached to the tip of the
このようにすると、アクチュエータ10Dを光記録媒体再生装置内に水平な姿勢で取り付けることができるため、前記アクチュエータ10Dを構成する固定部材41の底面41A側を持ち上げた状態で固定する必要がなくホログラフィー装置としての全体の高さ寸法を低く抑えることができ、これを搭載した光記録媒体再生機器の小型化・薄型化を促進させることが可能となる。
In this way, since the
上記の各実施の形態の支持機構30では、前記固定ベース31と可動リング32との間、および可動リング32と可動軸22bとの間を回転する機構として小球33,34を利用した第1の軸受部および第2の軸受部として説明したが、本発明はこれに限られるものではなく、例えば前記小球33,34の代わりに回動ピンとこれを支持する軸受部材で構成されるものであってもよい。あるいは、支持機構30が板ばねをプレス加工等した一体型のジンバルとして形成されており、前記板ばねが弾性変形(ねじれ変形)することにより前記可動軸22bが2軸方向に傾倒させられる構成であってもよい。
In the
10,10A,10B,10C,10D 2軸型アクチュエータ
20 制御対象(被制御機構)
21 反射ミラー(制御対象)
22 ミラー支持部
22b 可動軸
30 支持機構
31 固定ベース
32 可動リング
33,34 小球
40 磁気駆動機構
41 固定部材
41b 貫通孔
42,42A,42B,42C,42D コイル
43 ストッパピン
46 外ヨーク
46a 貫通孔
47,47A,47B,47C,47D 穴部
48 内ヨーク
51 可動ベース
52A,52B,52C,52D コイル
M 磁石
O 回転中心(支持機構の支持中心点)
P1−P2 仮想軸(第1の軸)
Q−Q 仮想軸(第2の軸)
10, 10A, 10B, 10C, 10D 2-
21 Reflection mirror (control target)
22
P1-P2 virtual axis (first axis)
QQ virtual axis (second axis)
Claims (9)
前記駆動機構は、基準軸を挟んで第1の方向で対称に配置された一対の第1の磁気駆動部と、基準軸を挟んで第1の方向と直交する第2の方向で対称に配置された一対の第2の磁気駆動部とを有し、
前記駆動機構が、前記可動軸と共に揺動する可動側と前記可動軸を傾倒自在に支持する支持側の一方に設けられた外ヨークおよび他方に設けられた4つのコイルを有しており、
前記外ヨークに、第1の磁気駆動部と第2の磁気駆動部の4箇所の磁気駆動部を構成する4つの穴部が形成されて、それぞれの穴部の内部に磁石と内ヨークとが固定され、それぞれのコイルが前記穴部の内周面と前記内ヨークの外周面との間に位置していることを特徴とする2軸型アクチュエータ。 A movable shaft that supports the object to be controlled, a support mechanism that swingably supports the movable shaft around the orthogonal first and second axes, and the movable shaft as the first and second axes. A biaxial actuator having a magnetic drive mechanism that tilts from a posture that matches a reference axis orthogonal to
The drive mechanism is arranged symmetrically in a second direction perpendicular to the first direction across the reference axis, and a pair of first magnetic drive units arranged symmetrically in the first direction across the reference axis A pair of second magnetic drive units,
The drive mechanism has an outer yoke provided on one of a movable side that swings together with the movable shaft and a support side that tiltably supports the movable shaft, and four coils provided on the other side,
The outer yoke is formed with four holes constituting the four magnetic drive parts of the first magnetic drive part and the second magnetic drive part, and the magnet and the inner yoke are formed in each of the hole parts. A biaxial actuator characterized in that each coil is fixed and located between the inner peripheral surface of the hole and the outer peripheral surface of the inner yoke .
支持側から基準軸に沿って延びるストッパピンが設けられ、このストッパピンが外ヨークに挿入されて、前記可動軸の傾きが規制されている請求項2記載の2軸型アクチュエータ。 The outer yoke is disposed on the movable side, and the coil is disposed on the support side;
3. The biaxial actuator according to claim 2, wherein a stopper pin extending along the reference axis from the support side is provided, and the stopper pin is inserted into the outer yoke to restrict the inclination of the movable shaft .
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005259060A JP4757573B2 (en) | 2005-09-07 | 2005-09-07 | Biaxial actuator and holography device using the same |
| PCT/JP2006/317457 WO2007029643A1 (en) | 2005-09-07 | 2006-09-04 | Actuator and holography device using same |
| EP06797380.0A EP1923985A4 (en) | 2005-09-07 | 2006-09-04 | Actuator and holography device using same |
| US12/043,072 US7719396B2 (en) | 2005-09-07 | 2008-03-05 | Actuator |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005259060A JP4757573B2 (en) | 2005-09-07 | 2005-09-07 | Biaxial actuator and holography device using the same |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2007073133A JP2007073133A (en) | 2007-03-22 |
| JP2007073133A5 JP2007073133A5 (en) | 2007-11-22 |
| JP4757573B2 true JP4757573B2 (en) | 2011-08-24 |
Family
ID=37934462
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005259060A Expired - Fee Related JP4757573B2 (en) | 2005-09-07 | 2005-09-07 | Biaxial actuator and holography device using the same |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4757573B2 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015162933A1 (en) * | 2014-04-25 | 2015-10-29 | ミツミ電機株式会社 | Actuator, air pump, beauty treatment device, and laser scanning device |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5768771B2 (en) * | 2012-06-29 | 2015-08-26 | ミツミ電機株式会社 | Camera module drive device and camera-equipped mobile terminal |
| JP5958611B2 (en) * | 2015-06-25 | 2016-08-02 | ミツミ電機株式会社 | Camera module drive device and camera-equipped mobile terminal |
| JP6103023B2 (en) * | 2015-11-27 | 2017-03-29 | ミツミ電機株式会社 | Camera module drive device, camera unit and camera-equipped mobile terminal |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5877830U (en) * | 1981-11-20 | 1983-05-26 | 日本圧電気株式会社 | Galvano mirror rotation support device |
| JPS62148174A (en) * | 1985-12-19 | 1987-07-02 | 日立金属株式会社 | Small-angle tilting rolling device for robot |
| JP3038134B2 (en) * | 1994-06-20 | 2000-05-08 | シャープ株式会社 | Imaging device |
| JPH08146862A (en) * | 1994-11-25 | 1996-06-07 | Asahi Glass Co Ltd | Exposing method for hologram |
| JP2000078086A (en) * | 1998-08-27 | 2000-03-14 | Sony Corp | Optical space transmission device |
| JP4666439B2 (en) * | 2001-05-18 | 2011-04-06 | 新電元工業株式会社 | 2-axis actuator |
| US7742378B2 (en) * | 2003-01-21 | 2010-06-22 | Stx Aprilis, Inc. | Method and apparatus for azimuthal holographic multiplexing using elliptical reflector |
| JP2005196927A (en) * | 2003-05-01 | 2005-07-21 | System Giken Kk | Optical pickup lens driving apparatus |
| JP2007052887A (en) * | 2005-08-19 | 2007-03-01 | System Giken Kk | Optical pickup lens driving device |
-
2005
- 2005-09-07 JP JP2005259060A patent/JP4757573B2/en not_active Expired - Fee Related
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015162933A1 (en) * | 2014-04-25 | 2015-10-29 | ミツミ電機株式会社 | Actuator, air pump, beauty treatment device, and laser scanning device |
| JP2015211552A (en) * | 2014-04-25 | 2015-11-24 | ミツミ電機株式会社 | Actuator, air pump, hairdressing device and laser scanning device |
| US10615677B2 (en) | 2014-04-25 | 2020-04-07 | Mitsumi Electric Co., Ltd. | Actuator, air pump, beauty treatment device, and laser scanning device |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007073133A (en) | 2007-03-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7719396B2 (en) | Actuator | |
| US20080112279A1 (en) | Lens drive apparatus | |
| JP4757573B2 (en) | Biaxial actuator and holography device using the same | |
| US20070189129A1 (en) | Object lens drive unit | |
| US7738153B2 (en) | Magnetic field position feedback for holographic storage scanner | |
| WO2007139136A1 (en) | Actuator | |
| JP2003338069A (en) | Optical head device | |
| JP3770367B2 (en) | Optical pickup device | |
| JP2007073133A5 (en) | ||
| JP2007072168A (en) | Dual shaft actuator | |
| JP2006260704A (en) | Optical pickup actuator | |
| JP2007052887A (en) | Optical pickup lens driving device | |
| JPWO2008001794A1 (en) | Hologram playback device | |
| JP2006309888A (en) | Optical pickup actuator | |
| JP2007072756A (en) | Biaxial actuator | |
| US7697398B2 (en) | Optical pickup device having an electromechanical conversion element for recording and/ or reproducing information | |
| WO2007145236A1 (en) | Actuator | |
| JP2008140437A (en) | Lens drive unit | |
| US7200849B2 (en) | Optical head and optical disc drive | |
| TW200425120A (en) | Optical pickup lens driving device | |
| JP2006012203A (en) | Optical element for optical pickup, and optical pickup using the same | |
| JP2008017640A (en) | Actuator | |
| JP2003196864A (en) | Optical pickup actuator | |
| EP1785989A1 (en) | Pickup for optical recording media and device having the pickup | |
| JP4347719B2 (en) | Optical head |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071009 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20071009 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110208 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110405 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110517 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110601 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140610 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |