本発明は、医療用具の湾曲部に対して湾曲動作を行わせるための駆動手段を制御する医療用制御装置に関する。
従来より、医療用具として内視鏡は、幅広く利用されている。内視鏡の細長の挿入部を体腔内に挿入することにより、術者は、体腔内臓器などを観察したり、必要に応じて処置具チャンネル内に挿通した処置具を用いて各種治療処置ができる。また、工業分野においても、作業者は、内視鏡の細長の挿入部を挿入することにより、ボイラ,タービン,エンジン,化学プラントなどの内部の傷や腐蝕などを観察したり検査することができる。
このような内視鏡には、細長な挿入部の先端部基端側に湾曲自在な湾曲部が設けられている。前記内視鏡において、術者等の使用者は、操作部に設けられた湾曲操作レバー等の湾曲操作入力手段を操作することにより、湾曲部を湾曲動作させるための湾曲駆動手段に、前記湾曲部の湾曲方向や湾曲の速度が湾曲量として指示入力される。
そして、前記湾曲駆動手段は、前記湾曲操作レバーによる湾曲量に基づき、前記湾曲部を構成する湾曲駒に接続された湾曲操作ワイヤを機械的に牽引又は弛緩させることにより、前記湾曲部を湾曲動作させる。
この種の従来の内視鏡には、湾曲駆動手段として例えば内視鏡内部に内蔵したモータを電気的に回動制御してこのモータの駆動力により湾曲操作ワイヤを牽引又は弛緩して前記湾曲部を湾曲動作させる電気的湾曲駆動方式、つまり電動湾曲内視鏡がある。
例えば、特許2917263号公報には、電動湾曲内視鏡において、前記湾曲操作ワイヤを牽引するプーリを有しこのプーリに対応するモータのトルクを内視鏡挿入部の種類に合うように設定できる制御手段等に関する技術が開示されている。
また、特許2845255号公報には、電動湾曲内視鏡において、湾曲部の全操作範囲のモータにかかる負荷を均一にできる内視鏡の湾曲操作装置に関する技術が開示されている。
特許2917263号公報
特許2845255号公報
しかしながら、前記従来の電動湾曲内視鏡は、湾曲入力手段を操作して指示入力される湾曲量に基づいて湾曲駆動手段であるモータを電気的に回動制御することにより、湾曲操作ワイヤを牽引又は弛緩して前記湾曲部を湾曲動作させるものである。この湾曲部には複数の湾曲駒が連接されており、湾曲時に湾曲部は湾曲部全体に渡って湾曲するといった構成であるため、例えば大腸などの管腔内に挿入する際、湾曲部の先端側をこの管腔内の形状に合わせた形状に湾曲固定させて挿入することはできず、例えばS状結腸部への挿入については熟練した操作を要していた。
また、湾曲部の先端側を湾曲可能にする構造としては、湾曲操作ワイヤに連結される複数のリンク部材をそれぞれ回動自在に連接して湾曲部を構成し、湾曲操作ワイヤを牽引又は弛緩することにより前記複数のリンク部材をそれぞれ湾曲させるようにした多関節の電動湾曲内視鏡を構成することが考えられる。
しかしながら、このような多関節の電動湾曲内視鏡では、湾曲操作ワイヤを牽引又は弛緩して例えば先端側から2番目のリンク部材を湾曲させると、この2番名のリンク部材と先端側のリンク部材との間に設けられた湾曲操作ワイヤの干渉等によって先端側のリンク部材が湾曲してしまい、操作性に影響を及ぼしてしまうといった不都合があった。
本発明は、前記事情に鑑みてなされたものであり、湾曲部の先端側を湾曲固定すると同時に湾曲部が管腔内の形状に合った形状になるように湾曲部の駆動を制御することができることにより、医療用具の挿入部の挿入性を向上できる医療用制御装置を提供することを目的とする。
また、本発明は、湾曲部の駆動を制御する際に、先端部以外のリンク部材を湾曲させても先端側のリンク部材が湾曲しないように補正することができる医療用制御装置を提供することを他の目的とする。
請求項1に記載の発明の医療用制御装置は、被検体内に挿入される挿入部の先端側に、複数の湾曲操作ワイヤにそれぞれ連結される複数のリンク部材がそれぞれ回動自在に連設された湾曲部を有する医療用具と、前記湾曲操作ワイヤのそれぞれを牽引又は弛緩することにより前記複数のリンク部材をそれぞれ回動させて前記湾曲部を湾曲動作させるための駆動手段と、前記複数のリンク部材の内、前記挿入部の最も先端側のリンク部材の位置と向きを指定する指定手段と、前記医療用具の前記湾曲部が移動したときに前記指定手段により指定された位置と向きを維持しながら前記最も先端側のリンク部材及びこのリンク部材に連なる他のリンク部材が前記位置を通過するように前記複数のリンク部材のそれぞれの角度を演算し、この演算結果に基づいて、前記複数のリンク部材を回動させるように前記駆動手段を制御する制御手段と、を有している。
請求項2に記載の発明の医療用制御装置は、被検体内に挿入される挿入部の先端側に、複数のリンク部材がそれぞれ回動自在に連設された湾曲部を有する医療用具と、前記複数の最も先端側に位置するリンク部材に連結される少なくとも1本の湾曲操作ワイヤと、前記湾曲操作ワイヤを牽引又は弛緩することにより前記複数のリンク部材を回動させて前記湾曲部を湾曲動作させるための駆動手段と、前記複数のリンク部材の内、前記挿入部の最も先端側のリンク部材の位置と向きを指定する指定手段と、前記医療用具の前記湾曲部が移動したときに前記指定手段により指定された位置と向きを維持しながら、前記最も先端側のリンク部材及びこのリンク部材に連なる他のリンク部材が前記位置を通過するように前記複数のリンク部材のそれぞれの角度を演算し、この演算結果に基づいて、前記複数のリンク部材を回動させるように前記駆動手段を制御する制御手段と、を有している。
本発明によれば、湾曲部の先端側を湾曲固定すると同時に湾曲部が管腔内の形状に合った形状になるように湾曲部の駆動を制御することができることにより、医療用具の挿入部の挿入性を向上できる医療用制御装置の実現が可能となる。また、湾曲部の駆動を制御する際に、先端部以外のリンク部材を湾曲させても先端側のリンク部材が湾曲しないように補正することができる医療用制御装置の実現が可能となる。
以下、図面を参照して本発明の実施例を説明する。
図1乃至図29は本発明の実施例1における医療用制御装置の基本構成を説明するためのもので、図1は医療用制御装置を用いて内視鏡装置として構成した場合のシステム構成図である。
図1に示すように、本発明に係る医療用制御装置を用いた内視鏡装置1は、挿入部先端部内に図示しない撮像手段を備え、操作部10内に後述する挿入部9の湾曲部14を湾曲させるための駆動部10bを備えた医療用具としての電子内視鏡(以下、単に内視鏡)2と、前記内視鏡2に着脱自在に接続され、この内視鏡2に照明光を供給する光源装置3と、前記内視鏡2に着脱自在に接続され、前記内視鏡2の前記撮像手段を制御すると共に、この撮像手段から得られた信号を処理して標準的な映像信号を出力するビデオプロセッサ4と、前記ビデオプロセッサ4内あるいはこのビデオプロセッサ4とは別体に設けられ、前記湾曲部14を湾曲動作させるように前記内視鏡2の駆動部10bを制御するコントローラ5と、前記ビデオプロセッサ4で信号処理して得られた内視鏡画像を表示するモニタ6と、前記コントローラ5に電気的に接続される指定手段としての操作指令部7と、前記コントローラ5に電気的に接続される設定値入力手段としての設定値指令部8と、を有している。
なお、前記ビデオプロセッサ4には、図示しないVTRデッキ,ビデオプリンタ,ビデオディスク,画像ファイル記録装置などが接続できるようになっている。
前記内視鏡2は、観察対象部位へ挿入する細長の挿入部9と、この挿入部9の基端部に連設され、ビデオスイッチや送気・送水スイッチ等の操作部10aを有する把持部12と、この把持部12の側面より延設され、図示しない撮像手段に接続する信号ケーブルや照明光を伝達するライトガイドなどを内蔵したユニバーサルコード11と、このユニバーサルコード11の端部に設けられ、前記光源装置3及びビデオプロセッサ4に着脱自在に接続されるコネクタ部12と、を有している。
前記挿入部9は、先端に設けられた先端部13と、この先端部13の後部(被検体に挿入される挿入部9の先端側)に設けられ、後述する湾曲操作ワイヤ30A〜30Dの牽引又は弛緩により湾曲自在の湾曲部14と、この湾曲部14の後部に設けられ、軟性の管状の部材より形成される長尺で可撓性を有する可撓管部15とが連設されて構成している。
前記先端部13は、撮像手段としてCCDなどの図示しない固体撮像素子及びこの固体撮像素子を駆動するための回路基板などが組み込まれた撮像部や、体腔内の観察対象部位を照明するための照明光を伝達する図示しないライトガイドなどを内蔵して構成されている。なお、前記湾曲操作ワイヤ30A〜30Dは、前記挿入部9内を介して操作部10内の駆動部10b(具体的には各モータ)に連結されるようになっている。また、前記湾曲部14の構成については後述する。
前記コントローラ5には、接続線7bを介して前記操作指令部7が電気的に接続されている。この操作指令部7は、例えばジョイスティック7aを備えて構成されたものであり、このジョイスティック7aを操作することにより前記湾曲部14を湾曲動作させるための操作指令値信号を出力する。
また、前記コントローラ5には、接続線8bを介して設定値指令部8が電気的に接続されている。この設定値指令部8は、例えばキーボード8aを用いて構成されたものであり、このキーボード8aによるキー操作によって、コントローラ5に対し前記湾曲部14を湾曲させるのに必要な各種設定値の入力を行う。
次に、前記湾曲部14の構成について、図3乃至図8を参照しながら説明する。また、前記湾曲部14については、簡単のため、平面的動作駆動部としての取り扱いとして説明を行う(2次元の平面動作)。
図3及び図4はリンク構造の駆動機構を備えた湾曲部を有する挿入部先端側の概略構成を説明するもので、図3は挿入部先端側の斜視図、図4は挿入部先端側の断面図である。また、図5は駆動機構が湾曲操作ワイヤ、駆動用プーリ及びフリープーリで構成された湾曲部の構成を示す上面図、図6は図5に示す湾曲部の各リンク部材間に設けられた湾曲操作ワイヤの懸架状態を示す側面図、図7は図5の駆動軸を備えた駆動用プーリの構成を示す構成図、図8は図5のフリープーリの構成を示す上面図である。
図3及び図4に示すように、前記挿入部9の湾曲部14は、被検体内に挿入される挿入部9の先端側に設けられている。この湾曲部14は、挿入部駆動機構20を有し、この挿入部駆動機構20は、複数のリンク部材21a、21b、21c…21nが複数の関節部材20a、20b、20c…20nによってそれぞれ回動自在に連接されることにより、構成している。つまり、挿入部駆動機構20は、多関節のリンク構造を有している。
また、前記駆動部10bは、前記複数のリンク部材21a、21b、21c…21nを前記湾曲操作ワイヤ30A〜30Dの牽引又は弛緩によってそれぞれ回動させるための駆動源である複数のモータ27(図5及び図8参照)である。
これらのモータ27の駆動軸には、図示はしないがギア、スプロケットを介して前記湾曲操作ワイヤ30A〜30Dが連結されるようになっている。そして、これらの湾曲操作ワイヤ30A〜30Dは挿入部9内に延設され、基端部が前記複数のリンク部材21a、21b、21c…21nの内の最も後端側のリンク部材21nの駆動用プーリ23及びフリープーリ25に懸架される。このリンク部材21nとそれ以外のリンク部材21a、21b、21c…の各リンク部材間については、後述するが他の湾曲操作ワイヤ30a〜30fによって懸架されるようになっている。
このことにより、それぞれのモータ27の回転力が湾曲操作ワイヤ30A〜30D、駆動用プーリ23、フリープーリ25及び湾曲操作ワイヤ30a〜30fを介して、前記複数のリンク部材21にそれぞれ伝達されるようになっている。
なお、前記リンク部材21及び関節部材20の数は、図中に示す構成例に限定されるものではなく、前記内視鏡2の目的に応じて適宜その数を増減して構成することも可能である。また、前記リンク部材21aは、先端部13の最先端側に配置されたもので、このリンク部材21aの後端側には順にリンク部材21b、21c…21nが連結されるようになっている。また、これに伴い、前記関節部材20a、20b、20c…20nついても先端部13側から順にリンク部材21との間にそれぞれ配置されることになる。
図5には前記湾曲部14の具体的な構成が示されている。なお、図5では、4個のリンク部材21a〜21dを用いて前記挿入部駆動機構20を構成した場合を示している。
図5に示すように、前記湾曲部14の挿入部駆動機構20は、前記湾曲操作ワイヤ30A〜30D、30a〜30fを牽引又は弛緩することによって前記複数のリンク部材21a、21b、21c、21dがそれぞれ回動自在に連接されている。
前記複数のリンク部材21a、21b、21c、21dは、前記関節部材20a、20b、20c、20dである駆動シャフト24によってそれぞれ回動自在に連結されている。前記駆動シャフト24は、後述する駆動用プーリ23と一体的に構成された軸部材であり、この駆動シャフト24には、図示はしないがそれぞれ検出手段としてのポテンショメータが装着されている。
このポテンショメータは、駆動シャフト24の回転量を検出してリンク部材21の状態量検知信号として図示しない信号線を介して前記コントローラ5に出力するようになっている。なお、検出手段としてのポテンショメータは、例えば駆動部10b側に設けられたモータ27の回転力を湾曲操作ワイヤに伝達するためのスプロケット(図示せず)に設けて構成しても良い。
前記複数のリンク部材21a〜21dには、後段のリンク部材21に形成された連結突起部22Aを回動可能に軸支して収容するための連結溝22がそれぞれ設けられている。そして、後段のリンク部材21は、前記リンク部材21の連結溝22に装着された状態で連結突起部22Aに設けられた孔に前記駆動シャフト24が嵌装されて固定されることにより、回動可能に連結されるようになっている。
最も先端側のリンク部材21aの基端側には、前記連結溝24及び二番目のリンク部材21bの連結突起部22Aを軸支する駆動シャフト24が嵌装されて固定されている。この駆動シャフト24の片側の基端部には駆動用プーリ23が一体的に形成されており、この駆動用プーリ23は、先端側のリンク部材21aの側面に固定されるようになっている。
前記駆動シャフト24を有する駆動用プーリ23は、図7に示すように、湾曲操作ワイヤ30fが懸架され且つ牽引又は弛緩されることにより回転力を発生するもので、中央下側には前記駆動シャフト24が一体的に設けられている。
なお、駆動用プーリ23の駆動シャフト24の長さは、先端側のリンク部材21a、二段目のリンク部材23b、三段目のリンク部材23c、四段目のリンク部材24dと順に、後述するフリープーリ25を重ねて装着するのに必要な厚み分を考慮して長くなるように形成されている。
前記先端側のリンク部材21aに固定された駆動用プーリ23には、湾曲操作ワイヤ30fが懸架され、この湾曲操作ワイヤ30fの他方側は、二段目のリンク部材21bの同じ側に配され且つ駆動シャフト24に回動可能に軸支されたフリープーリ25に懸架されている。
このフリープーリ25は、図5及び図8に示すように、2つのプーリーが併設されるとともに、駆動シャフト24を挿通する穴25aを有して構成されている。このフリープーリ25は、二段目のリンク部材21bの逆側に固定された駆動用プーリ23の駆動シャフト24に回動可能に軸支されている。このフリープーリ25は、前記先端側のリンク部材21aの駆動用プーリ23と、三段目のリンク部材2cに設けられたフリープーリ25との双方からの湾曲操作ワイヤ30f、30dをそれぞれ2つのプーリによって懸架している。
また、二段目のリンク部材21bの前記フリープーリ25の逆側には駆動用プーリー23が固定されている。この駆動用プーリー23には、湾曲操作ワイヤ30eが懸架され、この湾曲操作ワイヤ30eの他方側は、三段目のリンク部材21cの同じ側に配され且つ駆動シャフト24に回動可能に軸支されたフリープーリ25に懸架されている。
このフリープーリ25のもう一方のプーリには、湾曲操作ワイヤ30cが懸架され、この湾曲操作ワイヤ30cの他方側は、四段目のリンク部材21dの同じ側に配され且つ駆動シャフト24に回動可能に軸支されたフリープーリ25に懸架されている。
また、三段目のリンク部材21cの前記フリープーリ25の逆側にはフリープーリ25を介して駆動用プーリ23が固定されている。この駆動用プーリ23には、湾曲操作ワイヤ30aが懸架され、この湾曲操作ワイヤ30aの他方側は、四段目のリンク部材21dの同じ側に配され且つ駆動シャフト24に回動可能に軸支されたフリープーリ25に懸架されている。また、前記駆動用プーリー23によって回動可能に軸支されたフリープーリのもう一方のプーリには、湾曲操作ワイヤ30bが懸架され、この湾曲操作ワイヤ30bの他方側は、四段目のリンク部材21dの同じ側に配され且つ駆動シャフト24に回動可能に軸支されたフリープーリ25に懸架されている。
四段目のリンク部材21dの片側には、前記湾曲操作ワイヤ30a、30dをそれぞれ一方のプーリに懸架している2つのフリープーリ25が駆動シャフト25に軸支されている。そして、これら2つのフリープーリ25には、挿入部9内を介して延設された湾曲操作ワイヤ30A、30Bが懸架されるようになっている。
また、四段目のリンク部材21dの逆側には、前記湾曲操作ワイヤ30cを一方のプーリに懸架しているフリープーリ25が駆動シャフト25に軸支されている。また、このフリープーリ25の外側には、前記駆動シャフト25と一体的に構成される駆動用プーリ23が配されている。この駆動用プーリ23はこのフリープーリ25を介して前記四段目のリンク部材21dに固定されている。そして、このフリープーリ25には、挿入部9内を介して延設された湾曲操作ワイヤ30Cが懸架されるようになっている。また、前記駆動用プーリ23には、同様に挿入部9内を介して延設された湾曲操作ワイヤ30Dが懸架されるようになっている。
前記湾曲操作ワイヤ30a〜30fは、図6に示すように、それぞれクロスした状態で対応する各リンク部材21間の駆動用プーリ23又はフリープーリ25に懸架されるようになっている。
上記構成の湾曲部14の湾曲操作ワイヤ30A〜30Dの牽引による湾曲動作を説明すると、例えば図5に示す湾曲操作ワイヤ30Dを回転力F4によって牽引すると、この湾曲操作ワイヤ30Dが懸架している駆動用プーリ23は、四段目のリンク部材21dに固定されているため、この四段目のリンク部材21dが回動することになる。
また、前記湾曲操作ワイヤ30Dを止めた状態で、逆側の湾曲操作ワイヤ30Aを回転力F2によって牽引すると、この湾曲操作ワイヤ30Aが懸架しているフリープーリ25が回転することにより、このフリープーリ25に懸架されている湾曲操作ワイヤ30aが牽引される。そして、この回転力は、この湾曲操作ワイヤ30aが懸架されている三段面のリンク部材21cの駆動用プーリ23に伝達されることにより、この三段目のリンク部材21dが回動することになる。
また、前記湾曲操作ワイヤ30D、30Aを止めた状態で、湾曲操作ワイヤ30Cを回転力F3によって牽引すると、この湾曲操作ワイヤ30Cが懸架しているフリープーリ25が回転することにより、このフリープーリ25に懸架されている湾曲操作ワイヤ30cが牽引される。そして、この回転力は、この湾曲操作ワイヤ30cが懸架されている三段面のリンク部材21cのフリープーリ25に伝達される。そして、このフリープーリ25が回転することにより、このフリープーリ25に懸架されている湾曲操作ワイヤ30eが牽引される。そして、この回転力は、この湾曲操作ワイヤ30eが懸架されている二段面のリンク部材21bの駆動用プーリ23に伝達されることにより、この二段目のリンク部材21dが回動することになる。
さらに、前記湾曲操作ワイヤ30D、30A、30Cを止めた状態で、湾曲操作ワイヤ30Bを回転力F1によって牽引すると、この湾曲操作ワイヤ30Bが懸架しているフリープーリ25が回転することにより、このフリープーリ25に懸架されている湾曲操作ワイヤ30bが牽引される。そして、この回転力は、前記同様に、この湾曲操作ワイヤ30bが懸架されている三段面のリンク部材21cのフリープーリ25、湾曲操作ワイヤ30d、二段目のリンク部材21bのフリープーリ25,湾曲操作ワイヤ30fを介して、先端側のリンク部材21aの駆動用プーリ23に伝達される。これにより、駆動用プーリ23が回転することにより、この先端側のリンク部材21dが回動することになる。
このように湾曲部14は、前記湾曲操作ワイヤ30A〜30Dを牽引又は弛緩するように駆動部10b内の各モータ27の回転力F1〜F4を適宜回転制御すれば、複数のリンク部材あるいは指定されたリンク部材21のみを回転動作させることが可能である。
次に、このような湾曲部14を有する内視鏡2を備えた内視鏡装置1の電気的な主要構成について図2を参照しながら説明する。
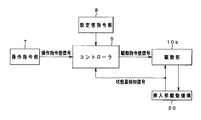
図2は内視鏡装置1の主要構成部分の電気的な構成を示すブロック図である。
図2に示すように、前記内視鏡装置1は、例えばジョイスティック7aを用いて構成される操作手段及び指定手段としての操作指令部7と、キーボード8aを用いて構成される設定値入力手段としての設定値指令部8と、前記操作指令部7からの操作指令値信号、前記設定値指令部8により設定された設定値及び前記ポテンショメータ23等からの状態量検知信号に基づいて前記駆動部10bを制御するための駆動指令値信号を出力するコントローラ5と、前記コントローラ5からの駆動指令値信号に基づいてそれぞれ回転制御されるモータ27等の駆動部10bと、この駆動部10bの回転力によって姿勢制御される湾曲部14内に設けられた挿入部駆動機構20と、を有して主要部を構成している。
前記操作指令部7は、ジョイスティック7aを用いて前記湾曲部14の湾曲を指示するための操作手段であり、操作に基づく操作指令値信号を前記コントローラ5に出力する。また、前記操作指令部7は、前記湾曲部14を構成する前記複数のリンク部材21a〜21nの内、2次元における位置と向きを固定するリンク部材21を指定する指定手段であり、この操作に基づく前記操作指令値信号を前記コントローラ5に出力する。
前記コントローラ5、駆動部10b及び挿入部駆動機構20を有する主要部の制御ブロック図が図9に示されている。
図9に示すように、前記コントローラ5(図2参照)は、指令制御部5Aを有している。この指令制御部5Aには、前記操作指令部7からの操作指令値信号が供給されるようになっている。
前記指令制御部5Aは、供給された操作指令値信号及び状態量検知信号に基づき、アクチュエータ制御ブロック31に設けられた駆動部10bを制御するのに必要な演算処理等を行うものである。
前記指令制御部5Aには、前記湾曲部14の挿入部駆動機構20を構成する複数のリンク部材21毎に設けられた複数の第1、第2…第nアクチュエータ制御ブロック31a〜31nが電気的に接続されている。
図10は図9に示す前記指令制御部5A及びアクチュエータ制御ブロック31の具体的な構成を示すブロック図である。
図10に示すように、前記指令制御部5Aは、前記操作指令部7からの操作指令値信号を入力するための入力部I/F33と、前記設定値指令部8からの設定指令値を入力するための入力部I/F34、35と、これらのI/F33〜35を介して入力された各種指令値信号に基づき、前記第1、第2、…第nアクチュエータ制御ブロック31a〜31n内の駆動部10bを制御する中央処理演算装置(例えばCPU)32と、を有している。
なお、前記入力部I/F33は、ジョイスティック7aがアナログの操作指令値信号を出力するものである場合にはこのアナログ信号の入力が可能である。また、前記入力部I/F33は、操作指令部7が他のデジタルの操作指令値信号を出力する操作手段である場合にはこのデジタル信号の入力が可能である。
また、前記入力部I/F34は、連続的に動作するのに必要なアナログの設定値指令信号の入力が可能であり、前記入力部I/F35はパラメータ変更などのデジタルの設定指令値の入力が可能である。前記入力部I/F34と前記入力部I/F35とは1つのI/Fとして構成しても良い。
一方、前記アクチュエータ制御ブロック31は、高速で各種の演算処理を行うとともに、演算結果に基づき駆動指令値信号を生成し出力するデジタルシグナルプロセッサ(Digital Signal Processor で、以下、DSPと称す)36と、このDSP36からの駆動指令値信号(サーボ指令値信号)に基づき操作出力値信号(駆動信号)を生成し出力する制御指令値出力部37と、この制御指令値出力部37からの操作出力値信号に基づき回転が制御される駆動部10bであるモータ27と、このモータ27の回転位置を検出するエンコーダやリンク部材21の回転角度を検出するポテンショメータ23等の検出手段であるセンサ38と、このセンサ38により検出された位置情報である状態量検知信号を検出して前記DSP36に出力するための信号入力部39と、を有している。
なお、本実施例では、前記駆動部10bとしてモータ27を用いているが、これに限定されることはなく、他のアクチュエータを駆動部10bとして用いるように構成しても良い。
図11は前記アクチュエータ制御ブロックの具体的な構成を示すブロック図であり、図12は図11のサーボ制御コントローラのブロック図を示している。
図10に示すアクチュエータ制御ブロック31において、前記DSP36は図11に示すサーボ制御コントローラ36Aを構成し、このサーボ制御コントローラ36Aは、供給されたサーボ指令値信号に基づく操作出力値信号(駆動信号)を生成し、前記制御指令値出力部37であるドライバ(アンプ)37aに出力する。なお、前記サーボ制御コントローラ36Aは、図10に示すCPU32に置き換えて構成しても良い。
前記ドライバ37aは、供給された操作出力値信号を増幅してモータ27を回転させる。すると、このモータ27の回転により図5に示すリンク部材21は回動動作する。このとき、前記センサ38は、リンク部材21の状態量検知信号を生成し、前記信号入力部39である検知部(アンプ)39aに出力する。
前記検知部39aは、供給された状態量検知信号を増幅して前記サーボ制御コントローラ36Aに出力する。このことにより、サーボ制御コントローラ36Aは、供給された状態量検知信号とサーボ指令値信号との比較を行いながら前記モータ27の回転制御を行うようになっている。
この場合、前記サーボ制御コントローラ36Aは、図12に示すように、供給されたサーボ指令値信号と、前記センサ38により得られたモータ27の変位情報である状態検出信号とに基づいて、PD制御部40を用いて公知の比例・微分制御等のPD制御を行って操作出力値信号(駆動信号)を生成し、モータ27に与えることにより回転制御する。
ところで、このような多関節のリンク構造の湾曲部14を備えた内視鏡2では、大腸などの管腔内の形状に合わせた形状で挿入するためには、先端側のリンク部材21aを最適な姿勢角度に制御すると同時に、これに連動してこの先端側のリンク部材21aに連なる複数他のリンク部材21についても制御する必要がある。このような本発明に用いられる基本的な制御方法を図13乃至15を参照しながら説明する。
図13乃至図15は多関節のリンク構造を有する湾曲部の姿勢制御を説明するもので先端部13側のリンク部材21a〜21cに対応した説明図であり、図13は先端部13側のリンク部材21aが所定の先端位置及び姿勢ベクトルの状態である図、図14は図13のリンク部材21aの姿勢状態である場合に予想される他のリンク部材の状態を示す図、図15は先端部13側のリンク部材21aのみを独立的に姿勢制御した所定の位置及び姿勢ベクトルの状態を示す図である。
本実施例のコントローラ5の指令制御部5Aは、前記湾曲部14を構成する複数のリンク部材21a〜21nをそれぞれ姿勢制御する際に、後述する運動学(順運動学及び逆運動学)に基づく演算処理を行うようになっている。
なお、順運動学に基づく演算処理とは、各関節(各リンク部材21)の角度が得られたとき、先端部の位置・姿勢ベクトルを求めるための演算処理であり、逆運動学に基づく演算処理とは、先端部の位置・姿勢ベクトルが得られたとき、各関節(各リンク部材21)の角度を求めるための演算処理を意味している。
前記指令制御部5Aは、後述するロボットの運動学を定量化する基本式に基づき、演算処理を行う。このようなロボットの運動学を定量化する基本式を下記に示す。今後、簡単のため、3リンク及び前述した様に2次元平面に限った動作説明を行うが、2次元平面動作から3次元空間動作に置換することは、よく知られているロボットの座標変換処理と同様にDH法(Denavit−Hartenberg表記法)による処理に差し替えることで対応可能となる。
ここで、xを手先座標、qを関節座標、及びJをヤコビアン(速度ベクトル)とすると、下記の式が定義できる。なお、x、q、Jは、それぞれのベクトルを示すものとする。
(式1)
(式2)
そして、以上の式(式1、式2)と各リンク拘束条件の運動学(ラグランジュアン)を解けば、下記のロボットダイナミクス(関節座標におけるトルクτ(または(∂
2q/∂t
2 ))とダイナミクスとの関係)を導出することが可能である。
(式3)
ただし、H(q)は慣性行列項、hはコリオリ及び姿勢変化に依存するダイナミクス項、gは重力項、τEXTは外乱要素を表す。
各関節(各リンク部材21であり図13中のq1、q2、q3)と手先位置(先端側のリンク部材21aの位置でありq1)とにおいて、手先位置加速度と関節加速度との動的関係については、前記(式1)〜(式3)の関係と、前記(式2)両辺を時間による微分操作を行った結果を用いて、
X=J・(d2q/dt2)+(dJ/dt)・(dq/dt)の関係と、右辺を行列分解(特異値分解など)することで行列空間を核空間(Kernell)と零空間(Null)に分解することができる。
これにより、下記に示す(式4)を導出することが可能である。
(式4)
ただし、(式4)中の表記#は擬似逆行列を表している。概して、前記(式4)において、左辺第1項は手先位置の動きを表し、第2項は手先以外の各関節の動きを表している。したがって、手先位置(先端側リンク部材21aの位置でq1)を決定する場合にそれ以降の関節姿勢(他のリンク部材21b〜21nでq1,q2)は、一意に決定されない。
つまり、図14に示すように、先端部のq1の位置が指定した場合、このq1を含むq2、q3からなるリンク部材の姿勢の取り方は、図中実線に示す姿勢以外に点線で示す姿勢のとり方も行うことができ、姿勢が一意には決まるものではない。すなわち、湾曲部14の各リンク部材21は、ロボットの姿勢の冗長性を有することになる。
そして、コントローラ5の指令制御部5Aは、前記(式3)、(式4)のリンク運動方程式を実時間で制御するための各リンクに付与すべきトルク計算、すなわち後述する(式7)、(式8)の計算を行うが、図15に示すように、先端部から次段のリンク部材21b、21c(q2、q3)についてはリンク位置・姿勢の運動学に基づく演算処理を行い、先端側のリンク部材21a(q1)については、独立的に駆動制御するアルゴリズム(図示しないメモリに記憶されている)に基づいて演算処理を行うようになっている。
このことにより、先端側のリンク部材21aの位置、姿勢(向き)が決定すると、前記演算処理を行うことにより、先端側のリンク部材21aに連なる他のリンク部材21の角度を求めることが可能である。
次に、前記運動学(順運動学及び逆運動学)に基づく演算処理を行うためのサーボ制御コントローラ36Aの具体的な構成及び制御方法について図16乃至21を参照しながら説明する。
図16乃至図21はサーボ制御コントローラ36Aの具体的な構成及び制御方法を説明するためのもので、図16はサーボ制御コントローラ36Aの概略構成を示すブロック図、図17は図16の制御則演算部36Bの具体的な構成を示すブロック図、図18は図17のダイナミックス演算部43の概略構成を示すブロック図、図19は図18のダイナミックス演算部43の具体的な構成を示すブロック図、図20は図17の運動学演算部41の概略構成を示すブロック図、図21は図20の運動学演算部41の具体的な構成を示すブロック図をそれぞれ示している。
図16に示すように、サーボ制御コントローラ36Aは、制御則演算部36Bを有しており、この制御則演算部36Bには、先端側のリンク部材21aあるいは各リンク部材21におけるサーボ指令値信号を含む設定指令値信号等の指令値情報(設定値情報も含む)と、各リンク部材21における状態量検知信号などの位置フィードバック情報(以下、位置F/B情報と称す)とが供給される。
そして、前記制御則演算部36Bは、供給された指令値情報と位置F/B情報とに基づいて、後述する運動学演算部41及びダイナミックス演算部43に各リンク部材21に対応する駆動指令値信号としての関節トルク指令値信号を得るための演算処理を行い、駆動部10bに出力する。
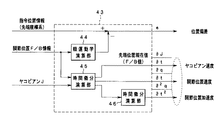
前記制御則演算部36Bの具体的な構成が図17に示されている。
図17に示すように、前記制御則演算部36Bは、先端側のリンク部材21aの先端位置座標である指令値位置情報と、各関節(各リンク部材21)の関節位置F/B情報とを入力して、これらの情報を用いて運動学に基づく演算処理を行う運動学演算部41と、この運動学演算部41の演算結果と、前記指令値情報及び関節位置F/B情報とを入力して、これらの情報を用いて各リンク部材21の変化量に関する動的な部分を導き出すためにダイナミクス演算処理を行うダイナミックス演算部43と、前記指令値情報と前記運動学演算部41及び前記ダイナミックス演算部43との各演算結果とを入力し、これらの情報に基づいて各リンク部材21を制御するのに必要な関節トルク指令値信号を演算処理する制御演算部42と、を有している。
そして、前記制御則演算部36Bは、生成された前記関節トルク指令値信号を、前記アクチュエータ制御ブロック31内の駆動部10bに供給することにより、挿入部駆動機構(マニピュレータ)20を制御する。
このとき、マニピュレータ20は、前記アクチュエータ制御ブロック31内のセンサ38によって検出された、状態量検知信号である各関節の関節位置F/B情報を前記運動学演算部41及びダイナミックス演算部43に出力する。
図18に前記ダイナミックス演算部43の概略構成を示し、図19に前記ダイナミクス演算部の具体的な構成が示されている。
図18に示すように、前記ダイナミックス演算部43は、前記運動学演算部41の演算結果である後述するヤコビアン(速度ベクトルで、JあるいはヤコビアンJとして説明することもある)と、前記指令値情報及び関節位置F/B情報とを入力して、これらの情報を用いてダイナミックス演算処理を行うことにより、各リンク部材21の変化量に関する動的な部分、すなわち、各リンク部材21の位置偏差、ヤコビアンJ、関節位置速度・加速度を導き出し、演算処理結果として出力する。
具体的には、前記ダイナミックス演算部43は、図19に示すように、順運動学演算部44と、時間微分演算部45と、時間微分演算部46と、を有している。
前記順運動学演算部44は、前記関節位置F/B情報に基づいて前記した順運動学に基づく演算処理を行う。この演算出力結果は、減算器によって先端部のリンク部材21aの先端位置情報から差し引かれることにより、各リンク部材21の位置偏差eが導きだされる。
前記時間微分演算部45は、前記関節位置F/B情報とヤコビアンJとが入力され、前記関節位置F/B情報とヤコビアンJとを用いて時間微分演算処理を行うことにより、各リンク部材21の変位量、すなわち、ヤコビアン速度 ∂J/∂t、関節位置速度∂q/∂tを生成する。
前記時間微分演算部46は、前記関節位置速∂q/∂tを入力して時間微分演算処理を行うことにより、関節位置加速度∂2q/∂t2 を生成する。
図20に前記運動学演算部41の概略構成を示し、図21に前記運動学演算部41の具体的な構成が示されている。
図20に示すように、前記運動学演算部41は、前記指令値情報及び関節位置F/B情報を入力して、これらの情報を用いて運動学に基づく演算処理を行うことにより、先端側のリンク部材21aのヤコビアンJ、ヤコビアンJの疑似逆行列J+、及びヤコビアンJの零空間疑似逆行列(I−J+J)を導き出し、演算処理結果として出力する。
具体的には、前記運動学演算部41は、図21に示すように、ヤコビアン演算部47と、疑似逆行列演算部48と、ヤコビアン零空間演算部49と、を有している。
前記ヤコビアン演算部47は、前記指令位置情報と位置F/B情報に基づいてヤコビアンJを得るための演算処理を行い、得られたヤコビアンJを図17に示す制御演算部42、前記疑似逆行列演算部48及び前記ヤコビアン零空間演算部49に出力する。
なお、前記ヤコビアン演算部47によるヤコビアン演算処理に基づく(式5)を下記に示す。
(式5)
前記疑似逆行列演算部48は、前記ヤコビアンJが入力され、このヤコビアンJに一般化逆行列演算処理を行うことにより、疑似逆行列J
+を生成し、図17に示す制御演算部42及び前記ヤコビアン零空間演算部49に出力する。
なお、一般化逆行列演算処理に基づく(式6)を下記に示す。
(式6)
ただし、式中のスーパースクリプトTは転置行列を表している。
前記ヤコビアン零空間演算部49は、供給されたヤコビアンJと前記疑似逆後列J+とにヤコビアン零空間演算処理を行うことにより、疑似逆行列I−J+Jを生成し、前記図17に示す制御演算部42に出力する。
したがって、前記ヤコビアンJ、ヤコビアンJの疑似逆行列J+及びヤコビアン零空間疑似逆行列(I−J+J)は前記運動学演算部41の演算処理結果として、図17に示す制御演算部42に供給されることになる。制御演算部42においては、前述した指令値と状態量とに基づくPD制御を行う。
次に、前述した図17に示す制御則演算部36B内にて行われる各種演算処理に必要な制御則式を説明する。
本発明の医療用制御装置を用いた内視鏡装置1は、複数のリンク部材21と、複数の関節部材20aとを有してマニピュレータを構成する挿入部駆動機構20を備えている。このため、前記図17に示す制御則演算部36Bは、マニピュレータ運動方程式である前記(式3)、(式4)を基本とし、さらに、後述するマニピュレータ制御則に基づく各式を用いて各種演算処理を行うことにより、前記関節トルク指令値信号を導いている。
前記マニピュレータ制御則に基づく式を下記に示す。この場合、関節トルクをτとし、位置偏差eとすると、
(式7)
となる。
ただし、KP は制御量比例ゲイン、KD は制御量微分ゲイン、eは指令値と状態量から算出される位置偏差、φは前述した冗長性に重み付けするための制御パラメータ、h(*,*)、gは前述したパラメータである。
(式8)
となる。なお、K
NULL は、前記制御演算部42にて用いられる係数である。
前記(式7)においては、図17に示す前記運動学演算部41、前記ダイナミックス演算部43及び前記制御演算部42によって各種求められた演算処理結果を当てはめることにより、関節トルクτを得ることができる。
また、前記(式8)において、前記KNULL 以外の値については、前記運動学演算部41によって求められた演算結果である。
ところで、前記構成の内視鏡2の挿入部9を体腔内の挿入する場合、湾曲部14が剛体とならないように、湾曲部自体が柔らかなダイナミクス特性にすることが望ましい、そのためには、図22に示すようなばね20a及びダンパ20bの組み合わせによるダイナミクス特性を先端部で有することで実現している。
言い換えれば、ばね200a及びダンパ200bによる粘弾性作用により、図22中に示す力量Fが挿入部9の先端部13に加えられると、前記湾曲部14は、柔らかな特性、すなわち、コンプライアンス特性を有することになる。
以下、制御演算部42に実装される制御則についての説明を行う。
まず、図22におけるダイナミクス特性の運動方程式は、(式9)の通りに記述される。
(式9)
(式9)から、マニピュレータ手先の指令位置をX、手先に加わる外力をF
TIP 、その結果、生じる位置をX
Dとすれば、コンプライアンス特性を有する先端のダイナミクス特性は、(式10)の通りとなる。
(式10)
ここで、F
TIPに抗する等価な関節力τ
Fは、(式11)の通りである。
(式11)
また、簡単のため先端部が拘束された状態で外部環境から外力Fを受けたときの運動方程式は、先端部質量Mについてのみに対して記述すると(式12)の通りとなる。
(式12)
さて、前述したように、マニピュレータの運動方程式は、(式13)より、(式14a)及び(式14b)が導出される。
(式13)
(式14a)
(式14b)
ここで、改めて、各リンクのパラメータを含めたマニピュレータダイナミクスの記述を行ったときのコンプライアンス特性は(式15)の通りとなる。
(式15)
前記(式15)を前記(式14a)に代入すると、(式16)の通りとなる。
(式16)
前記(式16)は(式7)と同様なものを別の形で示したものである。ここでは、簡単のため先端部にバネ特性Kを有するトルク指令の制御式を導出する。
(式16)において、速度が小さいときには、下記に示す(式17)の右辺1,2項を省略することが可能となるため、(式17)が導出され、さらに、D=0、KF=Iとし、先端変位量△X=(X−XD)が比較的小さいと仮定すれば、近似的に△X=J(q)・△qが正立する。
その結果、(式18)が導出される。これは、所望のコンプライアンス特性としてKを設定した場合の各関節にどのようなトルク指令を生成させたかを示している。
(式17)
(式18)
前述のことから、(式7)、(式16)に関して、概して、(式4)において左辺第1項は手元位置の動きを表し、第2項は関節の動きを表していることが解る。
そこで、前記コントローラ5の指令制御部5Aは、前述したように前記(式7)、(式8)を実時間でトルク計算を行うが、前記(式7)の2項に該当する値を、リンク部材21の可動範囲に応じた重み付けを演算処理した結果として、駆動部10bを駆動制御するアルゴリズムに基づいて、演算処理を行うようにしても良い。
つまり、前記(式7)の2項の(I−J#・J)・(d2q/dt2)のアルゴリズムを、例えば図24に示すような重み関数φに変更して演算処理を行う。すなわち、前記重み関数φは、各リンク部材21の角度を決定する際に、各リンク可動範囲限界においては重みが大きくなり、可動範囲中立位置近傍においては重みが小さくなるような演算処理を行う。すなわち、各リンクの姿勢は出来るだけ、中立付近になるような姿勢となる重み設定となり、無理な姿勢を排除し、動き安い範囲内で動作するための係数である。
なお、予め設定された許容範囲内とは、例えば隣り合うリンク部材21のなす角度が±90度の範囲内を意味している。つまり、前記パラメータは、前記隣り合うリンク部材21のなす角度が鋭角にならないようにするためのものとなっている。
このことにより、前記挿入部駆動機構20の各リンク部材21が動き安く、且つ滑らかな姿勢制御が可能となる。
なお、前記重み関数φは、後述する図25乃至図29のいずれかのグラフに示すような重み関数を用いても良い。
このような図25乃至図29に示す重み関数の特性を説明する。なお、これら25乃至図29の縦軸は(式8)におけるKNULL を示し、横軸は各リンク部材21の動作範囲(各リンク部材21の検出された角度)を示している。また、正の動作制限値は90度であり、負の動作制限値は−90度としている。
図25は重み関数φの変形例1の特性を示すグラフである。図25に示すように、前記重み関数φは1次関数であり、各リンク部材21の位置変化に対応する下記に示すように演算処理することにより得た重み関数としたものである。
(式19)
なお、この場合αを負定値、qiを各リンク位置、qi_orgをリンク原点位置とする。 また、図26は重み関数φの変形例2の特性を示すグラフである。図26に示すように、前記重み関数φは2次関数であり、各リンク部材21の位置変化に対応する下記に示すように演算処理することにより得た重み関数としたものである。
また、図27は重み関数φの変形例3の特性を示すグラフである。図27に示すように、前記重み関数φは、各リンク部材21の位置変化に対応する偏微分を下記に示すように演算処理することにより得た重み関数としたものである。
(式21)
なお、この場合、αは負定値、qiは各リンク位置、qi_orgはリンク原点位置、qi_maxはリンク上限角度値、qi_minはリンク下限角度値である。
また、図28は重み関数φの変形例4の特性を示すグラフである。図28に示すように、前記重み関数φは、場合によっては前記図27に示す重み関数とは逆に、出来るだけ動作制限値近傍になるような重み関数として、後述する(式22)にφのオフセット値を加えて新たにφとしαを正定値とすることで図28の重み関数も実現できる。なお、この場合αは正定値である。
また、図29は重み関数φの変形例5の特性を示すグラフである。図29示すように、前記重み関数φは、前記変形例4の同様の効果として、図中波線部分を含むような三角関数の絶対値を(式22)の通り用いたものでも良い。
したがって、前述した図25乃至図29のいずれかのグラフに示すような前記重み関数φを用いて演算処理を行うことにより、無理な姿勢を排除し、動き易い範囲内で動作するための角度を各リンク部材21毎に取得することが可能である。
また、本実施例では、各リンク部材21毎に重み付けを行うのではなく、マニピュレータ20全体に対して、無理な姿勢を排除し、動き易い範囲内で動作するための重み付けを行うことも可能である。
このような場合、前記重み関数φは、マニピュレータ姿勢の特異度を評価指標としたものを用いる。すなわち、ヤコビアンJに対する可操作性指標Mを下記に示す(式23)のように定義し、この可操作性指標Mを前記重み関数φに替えて用いても良い。
図式
つまり、前記(式24)及び(図式)に示すように、J・JTの固有値を計算すれば、通常、行列J・JTの階数=Rank(i)となるが、特異姿勢の場合には、行列J・JTの階数<Rank(i)となり行列Mが退化される。すなわち、前記重み関数φに替えて、前記可操作性指標Mを用いて演算処理を行うことにより、各リンク部材21毎ではなく、マニピュレータ20全体に対して、無理な姿勢を排除し、動き易い範囲内で動作するための重み付けを行うことが可能である。この場合、各リンク部材21は一意に制御されない。
以上示した通り幾つかの姿勢制御における重み関数を示しているが、場合によっては後述する軸切り替え手段により、前記重み関数の組み合わせを、各リンク間での異なる重みの組み合わせを選択的に行うことも可能である。
なお、本発明では、前記図25乃至図29に示す重み関数や、(式24)及び(図式)に示すような可操作性指標Mを用いた重み関数は、それぞれテーブル毎に格納されるようになっている。そして、コントローラ5(具体的にはCPU32)は、前記複数のテーブルの内、いずれかのテーブルに基づく重み関数を選択し、選択した重み関数を用いて、各リンク部材21の角度の演算処理、あるいはマニピュレータ全体に対する各リンク部材21の各角度の演算処理を行うようになっている。
次に、前述したような湾曲部14の姿勢駆動制御を行うコントローラ5の実施例1について図30乃至図39を参照しながら説明する。
図30乃至図39は本発明の実施例1に係り、図30は内視鏡装置1のコントローラ5の具体的な構成を示すブロック図、図31及び図32は湾曲部14を構成する挿入部駆動機構20の姿勢制御を説明するもので、図31は先端側のリンク部材21aをポイントロックした状態を示す説明図、図32は先端側のリンク部材21aをポイントロックすることにより次段のリンク部材が冗長性を有している状態を示す説明図である。また、図33は図30のポイントロック演算部50の具体的な構成を示すブロック図、図34は図33の逆運動学演算部52の具体的な構成を示すブロック図、図35は先端側のリンク部材21aをポイントロックしたときの姿勢状態を説明する説明図である。また、図36乃至図38は湾曲操作ワイヤの牽引又は弛緩により多リンク部材21を湾曲動作させる場合の問題点を説明するための説明図であり、図36は複数のリンク部材が非湾曲動作時である状態を示し、図37は二段目のリンク部材を90度湾曲させた時に先端側のリンク部材が干渉によって湾曲してしまう状態を示し、図38は本実施例のコントローラによって図37に示す状態から先端側のリンク部材を90度逆方向に補正制御した状態をそれぞれ示している。さらに、図39は本実施例の各アクチュエータ制御ブロック内のサーボ制御コントローラの構成を示すブロック線図である。
本実施例におけるコントローラ5は、上述したような湾曲部14の姿勢制御を行うサーボ制御コントローラ36Aを有し、このサーボ制御コントローラ36Aには、前記制御則演算部36Bの演算処理機能を有するポイントロック演算部50が設けられている。
前記サーボ制御コントローラ36は、前記ポイントロック演算部50を用いて、前記湾曲部14が挿入されることによって移動したときに前記操作指令部7により指定された位置と向きを維持しながら前記操作指令部7により指定されたリンク部材21a及びこのリンク部材21aに連なる他のリンク部材21が前記位置を通過するように、前記複数のリンク部材21のそれぞれの角度を演算処理し、この演算結果に基づいて、前記複数のリンク部材21を回動させるように駆動部10bを制御する。
また、本実施例において、サーボ制御コントローラ36は、前記ポイントロック演算部50により前記複数のリンク部材21のそれぞれの角度を求めるための演算処理を行う際に、前記図25乃至図29のグラフに示す特性等の重み関数を格納したそれぞれのテーブルの内、手動、あるいは自動的にいずれかのテーブルを選択し、このテーブルに基づく重み関数を用いて演算処理を行うようになっている。
このような演算処理を行うポイントロック演算部50の構成について図30、図33及び図34を参照しながら説明する。
図30に示すように、前記ポイントロック演算部50には、先端側のリンク部材21aにおけるサーボ指令値信号を含む設定指令値信号等の先端指令値情報と、前記リンク部材21aにおける状態量検知信号などの位置F/B情報とが供給される。
そして、前記ポイントロック演算部50は、供給された先端指令値情報と位置F/B情報とに基づいて、後述する先端リンク根元座標位置計算部51及び逆運動学演算部52によって各リンク部材21に対応する駆動指令値信号としてのサーボ位置指令信号(関節トルク指令値信号を含む)を得るための演算処理を行う。
すなわち、前記ポイントロック演算部50は、供給された先端指令値情報と位置F/B情報とに基づいて、前記湾曲部14が挿入されることによって移動したときに前記操作指令部7により指定された位置と向きを維持しながら前記操作指令部7により指定されたリンク部材21a及びこのリンク部材21aに連なる他のリンク部材22が前記位置を通過するように、前記複数のリンク部材21のそれぞれの角度を演算処理し、この演算結果をサーボ位置指令値信号として駆動部10bに出力する。
なお、前記ポイントロック演算部40の演算処理に用いられる前記先端指令値情報と前記位置F/B情報とは、検出手段であるセンサ38によって検出される、前記複数のリンク部材21が互いになす角度及びその角度の変化量を示している。
このことにより、駆動部10bは、供給されたサーボ位置指令信号に基づき指定されたリンク部材21の回動をそれぞれ制御することにより、前記挿入部駆動機構20を有する湾曲部14は、挿入する管腔内の形状に合わせた形状に湾曲されることになる。
図31には先端側のリンク部材21aのみが指示された所定の姿勢状態でポイントロックされた状態が示されている。
このような姿勢状態に制御する場合、前記ポイントロック演算部50は、図32に示すように、先端部側のリンク部材21aの関節部材20aをポイントロックR1とすると、このポイントロックR1のポイントロック座標値を演算処理することにより先端側のリンク部材21aを2次元(2次元空間)における位置と向きを姿勢制御するのに必要なサーボ位置指令信号を生成する。
また、図32に示すように、先端側のリンク部材21aがポイントロックされている姿勢状態では、前記ポイントロックR1以降の複数のリンク部材21b、21c、21dで構成されるリンク部20Bは、前述した姿勢制御によって冗長性を有し、図中波線で示すように規制されない任意な姿勢に変化可能となる。
図33に前記ポイントロック演算部50の具体的な構成が示されている。図33に示すように、前記ポイントロック演算部50は、先端リンク根元座標位置計算部51と、逆運動学演算部52と、を有している。
前記先端リンク根元座標位置計算部51は、リンク部材21の関節角度情報と、先端側のリンク部材21aの位置情報である先端指令値情報と、位置F/B情報とが入力され、これらの情報に基づき、先端側のリンク部材21aの先端リンク根元座標位置を算出し、算出結果を逆運動学演算部52に出力する。
前記逆運動学演算部52は、前記先端リンク根元座標位置計算部51からの先端指令値情報と前記位置F/B情報とが入力され、これらの情報に基づき、前記先端側のリンク部材21a以降のリンク部材21における根元座標位置を演算処理し、先端側のリンク部材21a以外のサーボ位置指令値信号を生成し出力する。
図34に前記逆運動学演算部52の具体的な構成が示されている。図34に示すように、前記逆運動学演算部52は、機構パラメータ演算部53と、順運動学演算部54と、ヤコビアン演算部55と、ゲイン56と、行列演算部57と、積分回路58と、を有している。 前記機構パラメータ演算部53は、位置F/B情報をもとに先端側のリンク部材21aを微妙な姿勢に調整制御するための先端リンクオフセット値を演算処理して生成する。この先端リンクオフセット値は、前記先端指令値信号とで差分が求められ、この差分値は、前記順運動学演算部54により演算処理された指令値F/B情報とで再度差分が求められる。このことにより、この差分値は2段目位置指令情報として前記ゲイン56に供給される。前記ゲイン56は、供給された2段目位置指令情報を増幅し、前記行列演算部57に出力する。
一方、前記ヤコビアン演算部55は、図21にて説明したものと同様に、指令値情報を元に演算処理することによりヤコビアンJを生成し、前記行列演算部57に出力する。
前記行列演算部57は、供給された2段目位置指令情報を基に、リンク部材21の姿勢状態に応じた2段目以降のリンク部材21の姿勢(角度)を決定するための行列演算処理を行い、得られた演算結果を積分回路58により積分処理を施した後、2段目以降のサーボ指令値信号として駆動部10bに出力する。
なお、前記積分回路58の出力、すなわち、2段目以降のサーボ指令値信号は、前記ヤコビアン演算部55及順運動学演算部54を介して先端指令値情報と位置F/B情報との偏差値にフィードバックされている。これは、逆運動学を解く際の特異解を出来るだけ発生しないよう考慮しているためである。
通常逆運動学であれば解析的に解を求めるが、特異解が発生した場合に解が求まらないことが生じる。そのため、ここでは、逆運動学を用いずに、順運動学による逆運動学を求める手法を用いており、ゲイン56の値によって収束速度を設定する構造になっている。 このことにより、2段目以降のリンク部材21は、前記先端側のリンク部材21aの姿勢制御に連動して微妙な姿勢となるように制御されることになる。
図35は実施例1のポイントロック演算部50によって姿勢制御された湾曲部14の湾曲状態を示している。
例えば、操作者が操作指令部7を用いて先端側のリンク部材21aのみをポイントロックするための指示を入力すると、前記ポイントロック演算部50は、前記したように演算処理を行うことにより、ポイントロックR1のポイントロック座標値(2次元における位置と向き)にて先端側のリンク部材21aをポイントロックするためのサーボ位置指令値信号を生成し、駆動部10bに与えて制御する。
このことにより、湾曲部14の先端側のリンク部材21aは、図35に示すようにポイントロックR1にて指示された姿勢ベクトル(2次元における位置と向き)でポイントロックされる。
また、このとき、前記ポイントロックR1以降の複数のリンク部材21b、21c、21dで構成されるリンク部20Bは、前記図33及び図34のブロック図にて説明したように、前記ポイントロック演算部50によって、前記先端側のリンク部材21aの姿勢制御に連動した冗長性を有する姿勢制御が行われるので、例えば図中矢印A方向に対してその姿勢が任意となる。
すなわち、ポイントロック演算部50は、前記湾曲部14が挿入されることによって移動したときに前記操作指令部7により指定された位置と向きを維持しながら前記操作指令部7により指定されたリンク部材21a及びこのリンク部材21aに連なる他のリンク部材22が前記位置を通過するように、前記複数のリンク部材21のそれぞれの角度を演算処理し、この演算結果に基づいて前記複数のリンク部材21を回動させるように駆動部10bを制御する。
なお、前記ポイントロック演算部50は、前記複数のリンク部材21のそれぞれの角度を演算処理する場合、前記操作指令部7により指定された重み関数テーブルに基づく重み関数を用いて演算処理する。これにより、複数のリンク部材21やマニピュレータ20の無理な姿勢を排除し、動き安い範囲内で動作させるのに必要な角度が前記複数のリンク部材21毎に取得でき、この演算結果に基づき、各リンク部材21の回動が制御される。
このような内視鏡装置1において、挿入部9を大腸に挿入する場合、術者は、湾曲部14を有する挿入部9を肛門を介して挿入する。そして、挿入部9の先端部14がS状結腸部に到達すると、サーボ制御コントローラ36Aは先端側のリンク部材21aを操作指令部7により指定した2次元における位置と向きにポイントロックさせる。
そして、術者は2次元における位置と向きにポイントロックされた先端側のリンク部21aをS状結腸部の腸壁に沿ってさらに奥へと挿入する。
すると、前記先端側のリンク部材21a及びこのリンク部材21aに連なる他のリンク部材21は、前記操作指令部7により指定された位置と向きを維持しながら前記位置を通過するような角度に制御されることになる。すなわち、湾曲部14はS状結腸部の形状に合った形状に湾曲動作しながら挿入されることになる。なお、2段目以降のリンク部材21b〜21nは、前記したように冗長性を有する姿勢制御が行われることになる。
このことにより、従来、挿入に困難を要していたS状結腸部に合わせた形状で挿入することができるので、S状結腸部を容易に通過させることが可能となる。よって、さらに、大腸の深部へと容易に挿入することができるので、挿入性を向上させることができる。
ところで、多関節のリンク構造を有する内視鏡装置では、湾曲操作ワイヤの牽引又は弛緩を制御することで湾曲部14を湾曲させるものであるため、リンク部材21間の湾曲操作ワイヤの干渉によって湾曲動作に影響を及ぼしてしまうことがある。このような問題点を図5、図36及び図37を参照しながら説明する。
なお、図36、図37中の駆動用プーリ23及びフリープーリ25の位置示された矢印は、説明のために各リンク部材の回動方向を示し、また図中左側の波線部分は、湾曲部14の各リンク部材の逆側部分を示している。
例えば、図36に示すように、術者は、挿入部9の湾曲部14が非湾曲状態であり、各リンク部材21a〜21dが湾曲してない状態から、二段目のリンク部材21bを図中に示すA矢印方向に90度湾曲するように湾曲操作したものとする。
この場合、二段目のリンク部材21bは、図5に示すように、湾曲操作ワイヤ30D、30Aを止めた状態で、湾曲操作ワイヤ30Cを回転力F3によって牽引することにより、この湾曲操作ワイヤ30、30c、フリープーリ25、湾曲操作ワイヤ30eを介してこの二段目のリンク部材21bに固定された駆動用プーリ23に回転力が伝達されて、例えば図中に示すA矢印方向に90度湾曲することになる。
ところが、このとき、湾曲部14の逆側に配された湾曲操作ワイヤ30A、30B、30a、30b、30d、30f(図5参照)は、それぞれ止められている状態であるため、これらの湾曲操作ワイヤ30A、30B、30a、30b、30d、30fをそれぞれ懸架している駆動用プーリ23やフリープーリ25には、図37に示すように、前記二段目のリンク部材21aの湾曲動作に伴って、図中左側の波線部分に示す矢印方向に曲げようとする力が生じることになる。
そして、先端側のリンク部材21aは、図5に示すように、駆動用プーリ23に懸架している湾曲操作ワイヤ30fを介して二段面のリンク部材21bのフリープーリ25と連結しているため、前記二段面のリンク部材21bの湾曲動作によってこのフリープーリ25に生じた力が前記湾曲操作ワイヤ30fに干渉してしまう。その結果、先端側のリンク部材21aは、図37に示すように、二段面のリンク部材21bに対して図中に示すC矢印方向に湾曲してしまうことになる。
しかしながら、本実施例の内視鏡装置1は、前記したような途中リンク部材21の湾曲動作に起因して先端側のリンク部材21aが湾曲してしまった場合には、図38に示すように、この先端側のリンク部材21aを、湾曲した角度分(90度)逆方向(図中に示すD矢印方向)に湾曲動作させるように補正制御することが可能である。このような湾曲補正制御可能なアクチュエータ制御ブロック内の概略構成を図39に示す。
本実施例の内視鏡装置1は、図9乃至図12で説明したように、各リンク部材21に応じたアクチュエータ制御ブロック31a〜31nを有しており、これらアクチュエータ制御ブロック31a〜31nには、それぞれサーボ制御コントローラ36Aが設けられている。
前記サーボ制御コントローラ36Aは、図12で説明したようにPD制御部40を有し、本実施例では、図39に示すように、さらに、このPD制御部40に供給されるサーボ指令値信号(モータ27からの変位情報も含む)を取り込み、このサーボ指令値信号から逆方向の位置指令変化補正量を求めて後段のPD制御部40にサーボ指令値信号と共に加算して供給する位置指令変化量補正部60を設けている。
すなわち、本実施例では、図39に示すように、先端側のリンク部材21a(最近位端側リンク部材)に対応するPD制御部40を第1PD制御部40Aとし、次段(二段目)のリンク部材21b(途中側リンク部材)に対応するPD制御部40を第2PD制御部40Bとし、そして、それ以降に続くリンク部材21n(最遠位端側リンク部材)に対応するPD制御部40を第NPD制御部40Nとすると、各PD制御部40A、40B…40Nの間には、それぞれ前記位置指令変化量補正部60A、60B…60Nが設けられている。
例えば、前記第1位置指令変化量補正部60Aは、供給されるサーボ指令値信号とモータ27の変位情報とから先端側のリンク部材21aの逆方向となる位置指令変化量を求め、後段の第2PD制御部40Bの入力側に出力する。
すると、第2PD制御部40Bは、前記第1位置指令変化量補正部60Aからの位置指令変化量が加算されたサーボ指令値信号が供給され、そして、このサーボ指令値信号に基づいて、比例・微分制御等のPD制御によって操作出力値信号(駆動信号であり、図中には途中側リンク部材駆動信号)を生成して対応するモータ27に与える。
また、前記第2位置指令変化量補正部60Bは、前記第2PD制御部40Bに供給されるサーボ指令値信号から二段目のリンク部材21bの逆方向となる位置指令変化量を求め、後段の例えば第NPD制御部40Nの入力側に出力する。
すると、第NPD制御部40Nは、前記第2位置指令変化量補正部60Bからの位置指令変化量が加算されたサーボ指令値信号が供給され、そして、このサーボ指令値信号に基づいて、比例・微分制御等のPD制御によって操作出力値信号(駆動信号であり、図中には際遠位端側リンク部材駆動信号)を生成して対応するモータ27に与える。
このように本実施例では、最近位端側リンク部材から途中側リンク部材を介し最遠位端側リンク部材にかけて、前段のリンク部材21の逆方向の位置指令変化量が順次後段のリンク部材のサーボ指令値信号に加算され、得られた駆動信号に基づいてモータ27の回転制御がなされることになる。
すなわち、本実施例のサーボ制御コントローラ36Aは、先端側のリンク部材12aが図37に示すように途中リンク部材21の湾曲動作に起因して90度湾曲してしまった場合には、先端側のリンク部材21aが湾曲した角度分(90度)逆方向に次段のリンク部材21bを湾曲動作させるように補正制御する。そして、サーボ制御コントローラ36Aは、後段のリンク部材21c以降についても同様に前段のリンク部材21が湾曲した角度分逆方向に湾曲動作させるように補正制御する。
このことにより、任意のリンク部材21の湾曲操作時に、各リンク部材21間の湾曲操作ワイヤの干渉によって先端側のリンク部材21が湾曲した場合でもこの先端側のリンク部材21aを確実に元の位置のなるように補正することができる。よって、操作指令に基づく先端部13の位置を維持することが可能となる。
ところで、前記コントローラ5は、湾曲部14を含む挿入部9全体の剛性を変化させるように剛性制御を行うことにより、挿入部9の挿入性をより向上させることが可能である。このような実施例を図40乃至図42に示す。
図40乃至図42は実施例2に係り、図40は実施例2の内視鏡装置全体の構成を示す構成図、図41はコントローラにより湾曲駆動されたときの湾曲部の特性を説明する説明図、図42は実施例2のコントローラによって剛性制御されたときの湾曲部の特性を説明する説明図である。なお、本実施例21では、湾曲部14を上下2方向に湾曲させることのできる内視鏡2を備えているものとして説明する。
図40に示すように、内視鏡装置1は、実施例1と同様のコントローラ5と、操作指令部7と、剛性設定ダイアル7Aと、内視鏡2と、を有している。
この内視鏡2は、駆動部10bである2つのモータ27a、27bと、各モータ27a、27bの回転力を伝達するための2つのギア61a、61bと、これら2つのギア61a、61bと噛合して回転することにより湾曲操作ワイヤ30a、30bをそれぞれ牽引又は弛緩させるスプロケット62a、62bと、前記湾曲操作ワイヤ30a、30bが挿入部9内に延設され、この湾曲操作ワイヤ30a、30bの牽引又は弛緩によって上下2方向に湾曲可能な湾曲部14と及び先端部13と、を有している。
なお、図示はしないが、前記スプロケット62a、62bには、各モータ27a、27bの回転量を検出するポテンショメータが設けられており、これらのポテンショメータによる検出結果は前記コントローラ5にフィードバックされるようになっている。
前記剛性設定ダイアル7Aは、前記湾曲部14あるいは湾曲部14を含む挿入部9全体の剛性レベルを設定するための操作手段であり、術者の操作に基づく剛性設定レベル信号を前記コントローラ5に出力する。
前記コントローラ5は、前記実施例1と略同様の構成ではあるが、前記操作指令部7による操作指令値信号に基づき湾曲部14を湾曲制御している際に、前記剛性設定ダイアル7Aが操作されると、この剛性設定レベル信号に基づいて湾曲動作している湾曲部14あるいは湾曲部14を含む挿入部9全体の剛性を制御する。
湾曲部14あるいは挿入部9全体における剛性制御について図41及び図42を参照しながら説明する。
図41は前記コントローラ5によって湾曲部14が下方向に湾曲駆動している状態について、動的簡易モデルとして示している。ここで、200a、200bの牽引ワイヤは簡単のため、ばねモデルとして内視鏡先端部に接続され端点が固定されている状態表現で取り扱っており、図41に示すように、前記湾曲操作ワイヤ30a、30bに印加される負荷量をばね20a、20bに例えると、モータ27bのみが駆動しているので、湾曲操作ワイヤ30b側のばね20bを牽引する力は、湾曲操作ワイヤ30a側のばね20aを牽引する力よりも大きくなる。このことにより、前記湾曲部14は、下方向に湾曲することになる。
そこで、本実施例では、前記湾曲部14が所定の湾曲形状に動作させた後に、例えば図42に示すように、逆側のモータ27aを前記したモータ27bと同じように回転制御することにより、前記湾曲操作ワイヤ30a側のばね20aを牽引する力を、前記湾曲操作ワイヤ30b側のばね20bを牽引する力と同じになるようにモータ27aを回転制御する。
このことにより、湾曲操作ワイヤ30a側のばね20aを牽引する力と前記湾曲操作ワイヤ30b側のばね20bを牽引する力と、内視鏡先端部はワイヤ200a、200b双方が端点固定であるために200a、200b双方に力が加わり、内視鏡挿入部全体に圧縮力が加わることになる。このとき、双方に力が加わったとしても、ワイヤ牽引の制御方式を位置制御にしておけば、ワイヤの位置を維持したまま、力が加わる形となる。
ここで、図41、図42、図45で表現されているばねは牽引ワイヤの動的モデルとして表現しているため、ワイヤそのものの特性となることを記しておく。
このため、前記湾曲部14がその湾曲形状が保持された剛性状態となる。また、前記湾曲操作ワイヤ30a、30bは前記挿入部9内に配されているため、この挿入部9全体においても剛性を有することになる。
なお、前記剛性設定ダイアル7Aは、前記湾曲操作ワイヤ30a、30b側のばね20a、20bを牽引するそれぞれの力のレベルを段階的に替えて設定できるようになっており、このため、コントローラ5は、湾曲駆動時に、湾曲部14あるいはこの湾曲部14を含む挿入部9の剛性レベルを適宜替えるように制御することが可能である。
したがって、実施例2によれば、湾曲部14あるいは湾曲部14を含む挿入部9全体の剛性を制御することができるので、挿入時に、適宜湾曲部14あるいは挿入部9全体を剛性制御すれば、挿入部9の挿入性を向上させることが可能となる。
図43乃至図47は実施例2の変形例1を説明するもので、図43は変形例1の内視鏡装置全体の構成を示す構成図、図44はサーボ制御コントローラ内の具体的な構成を示すブロック図、図45は実施例2のコントローラによって剛性制御されたときの湾曲部の特性を説明する説明図、図46は図44の湾曲用制御部を示すブロック線図、図47は図44の剛性制御用制御部を示すブロック線図である。
図43に示すように、変形例1の内視鏡装置1は、前記実施例2で用いた剛性設定ダイアル7Aを削除する他に、湾曲操作ワイヤ30a、30bのそれぞれのテンション状態を検出し前記コントローラ5に出力するテンションセンサ63a、63bをそれぞれ設けている。
つまり、前記テンションセンサ63a、63bをそれぞれ設けて設けたことにより、剛性制御時における湾曲部14あるいは湾曲部14を含む挿入部9全体の剛性状態を検出することができるようになっている。
そして、コントローラ5は、前記テンションセンサ63a、63bによる検出結果、つまり、テンションF/B情報を取り込み、剛性制御時には、操作指令部7により指示される剛性指令情報とテンションF/B情報とに基づき、各モータ27a、27bの回転駆動を制御することにより、湾曲部14あるいは挿入部9全体の剛性制御を行う。
また、前記コントローラ5は、前記実施例1と同様に、湾曲部14の位置指令制御を行うことが可能であり、このため、この位置指令制御と前記剛性指令制御とのいずれかのモードを実行することができるようになっている。
具体的には、前記操作指令部7には、前記湾曲位置指令制御を示すモードと、前記剛性指令制御を示すモードとを指定し、指定したモード指令情報を出力するモード指定手段(図示せず)が設けられている。このモード指定手段からのモード指令情報は、前記コントローラ5内のサーボ制御コントローラ36Aに出力されるようになっている。
図44には各モータ27a、27b毎に設けられたサーボ制御コントローラ36A内の具体的な構成が示されている。
図44に示すように、変形例1のサーボ制御コントローラ36Aは、前記操作指令部7のモード指定手段からのモード指令情報に基づき、湾曲位置指令制御モードと剛性指令制御モードであるかを判別するモード判別部70と、位置指令情報(サーボ指令値信号)と位置F/B情報に基づいて湾曲位置指令制御モードを実行するのに必要な湾曲位置指令制御用の操作出力値信号(駆動信号でありモータ位置指令信号ともいう)を生成して出力する湾曲制御部であるPID制御部71(図46参照)と、剛性指令情報とテンションF/B情報に基づいて剛性指令制御モードを実行するのに必要な剛性指令制御用の操作出力値信号(駆動信号でありモータ位置指令信号ともいう)を生成して出力する剛性制御用制御部であるP制御部72(図47参照)と、前記モード判別部70の判別結果に基づき、前記PID制御部71の出力と前記P制御部72の出力とのいずれか一方を選択出力して該当するモータ27a、27bに出力する切替え部64と、を有している。
したがって、前記切替え部64は、前記モード判別部70による判別結果が湾曲位置指令制御モードであると、湾曲用制御部であるPID制御部71からの駆動信号(モータ指令値信号)を指定したモータ27a、又はモータ27bに出力する。
この場合、前記湾曲用制御部であるPID制御部71は、図46に示すように、位置指令情報(サーボ指令値信号)と位置F/B情報に基づいて、比例・微分制御等のPD制御によって湾曲位置指令制御用の駆動信号(モータ位置指令信号ともいう)を生成して出力する。このことにより、この湾曲位置指令制御用の駆動信号が前記切替え部64を介して指定されたモータ27a、又はモータ27bに供給されてこのモータ27a又はモータ27bの駆動が制御されることにより、湾曲部14は位置指令情報に基づく湾曲動作がなされることになる。
一方、前記切替え部64は、前記モード判別部70による判別結果が剛性指令制御モードであると、剛性制御用制御部であるP制御部72からの駆動信号(モータ位置指令値信号)を指定したモータ27a、又はモータ27bに出力する。
この場合、前記剛性制御用制御部であるP制御部72は、図47に示すように、操作指令部7から供給される剛性指令情報とテンションF/B情報に基づいて、比例制御等のP制御によって剛性指令制御用の駆動信号(モータ位置指令信号ともいう)を生成して出力する。このことにより、この剛性指令制御用の駆動信号が前記切替え部64を介して指定されたモータ27a、又はモータ27bに供給されて駆動が制御されると同時に、もう一方のモータ27b、又はモータ27aに湾曲位置指令制御用の駆動信号が供給されて駆動が制御されることにより、湾曲部14は実施例2で説明したように湾曲駆動時の姿勢(湾曲方向)が維持された状態で剛性が制御されることになる。
なお、剛性指令制御モード実行時は、前記実施例2で説明したように、例えばモータ27aに剛性位置指令制御用の駆動信号を供給して駆動した場合には、必ず、もう一方のモータ27bに湾曲位置指令制御用の駆動信号が供給されて駆動されることになる。
つまり、図45に示すように、湾曲駆動時のモータ27bに連結される湾曲操作ワイヤ30b側のばね20bの牽引する力と、剛性変化駆動時のモータ27aに連結される湾曲操作ワイヤ30a側のばね20aを牽引する力とを同じにすることで、前記実施例2と同様に前記湾曲部14はその湾曲形状が保持されたまま剛性を有する状態となる。
したがって、本変形例によれば、湾曲部14の湾曲位置指令制御を行った状態で剛性指令制御を行うことが可能となり、実施例2よりもより挿入部9の挿入性を高めることが可能となる。
図48及び図49は実施例2の変形例2を説明するもので、図48は変形例2の内視鏡装置全体の構成を示す構成図、図49は変形例2のコントローラによって剛性制御されたときの湾曲部の特性を説明する説明図である。なお、図48及び図49は、前記実施例1,2及び変形例1と同様の構成要素については同一の負号を付して説明を省略し、異なる部分のみを説明する。
図48に示すように、変形例2の内視鏡装置1は、前記実施例2と前記変形例1との構成を組み合わせたもので、さらに湾曲部として前記実施例1と略同様の多関節のリンク構造を有する湾曲部14を用いて構成されている。
つまり、変形例2の内視鏡装置1は、前記実施例2及び前記変形例1と同様に剛性設定ダイアル7A、テンションセンサ63a、63bを有しており、さらに上下2方向にそれぞれ湾曲可能な複数のリンク部材21a〜21dを備えて構成された湾曲部14を有している。
変形例2のコントローラ5は、前記変形例1と同様に、湾曲駆動時の湾曲部14の湾曲方向(湾曲状態)を保持しながら湾曲部14を剛性状態にするように湾曲位置指令制御及び剛性指令制御を行うが、複数のリンク部材21の内、任意に指定されたリンク部材21についてもこの湾曲位置指令制御及び剛性指令制御を行うことが可能である。
この場合の複数のリンク部材21を有する湾曲部14の特性が図49に示されている。つまり、図49に示すように、湾曲部14は、先端側のリンク部材21の2つの湾曲操作ワイヤに印加される負荷量である2つのばね200a、200bと、二段目のリンク部材21bの2つの湾曲操作ワイヤに印加される負荷量である2つのばね200c、200dと、三段目のリンク部材21cの2つの湾曲操作ワイヤに印加される負荷量である2つのばね200e、200fと、以降のリンク部材21nの2つの湾曲操作ワイヤに印加される負荷量である2つのばね200n、200nとで示される特性を有することになる。
例えば、二段目、三段目のリンク部材21b、21cの湾曲駆動時に剛性指令制御を行った場合には、リンク部材21bのばね200cとばね200dとをそれぞれ牽引する力が同じになり、同時にリンク部材21cのばね200eとばね200fとをそれぞれ牽引する力が同じになる。
しかし、図49に示されている構成の通り、複数のばねが拮抗している物理モデルであるため、実際にコントローラ5で、複数のリンク部材21の内、任意のリンク部材21の剛性指令制御を行おうとすると、このリンク部材21とこのリンク部材21に連接するリンク部材21との間に配置される湾曲操作ワイヤや駆動用プーリ及びフリープーリによって干渉してしまい、先端側のリンク部材21a等が湾曲してしまう。
このため、前記コントローラ5のサーボ制御コントローラ36Aには、図示はしないが任意のリンク部材21を剛性指令制御した場合に先端側のリンク部材21aの湾曲動作を補正するための演算処理を行う補正演算部が設けられている。
ここで、図49に原理モデル図、図50(a)〜図50(c)に作用原理図を示す。なお、図50(a)は作用を説明するための湾曲部の原理図、図50(b)は第1湾曲部のワイヤの牽引に伴う蛇管長の短縮によってワイヤに弛みが生じた状態を示し、図50(c)は第2湾曲部のワイヤの牽引に伴う第2湾曲部の蛇管長の短縮によってワイヤに弛みが生じた状態を示している。
図50(a)において、例えば、第1湾曲部を駆動するために牽引ワイヤ200a(図49参照)を牽引したとする。このとき、図50(b)のように牽引ワイヤ200aのワイヤ牽引により蛇管長が短縮されることと同時に、第2湾曲部側に圧縮力が作用し、そのため牽引ワイヤ200b、200cのワイヤ経路が短くなることによりワイヤ弛みが発生する。
また、図50(a)の状態から第2湾曲部を駆動するために牽引ワイヤ200bを牽引した場合、第2湾曲部の蛇管長が圧縮されるため、牽引ワイヤ200aに前記同様の弛みが生じることになる。
このため、所望の駆動湾曲部以外の湾曲部にも駆動することによる影響が生じる。すなわち、複数湾曲部を有する場合には、所望駆動部以外の湾曲部に補正を行わせることになるということである。
次に、補正演算部の構成・作用を説明する。
補正方法は、前記実施例2内で示した通り、各湾曲牽引ワイヤ毎にワイヤ負荷検知手段63が各々配置され、所望の剛性設定湾曲部の駆動する前に、予め所望の剛性設定湾曲部以外の剛性設定値を記憶する手段である設定値記憶部74(51参照)が内蔵されている。
前記に示したブロック線図(図44、図47、図48)の位置指令、剛性指令、テンション指令の入力部に、図51に示すとおり、データを保存する設定値記憶部74を有することで補正が行われる。
設定値記憶部74は、所望湾曲部の剛性設定が行われると同時に、所望湾曲部以外の駆動部においてラッチ信号が動き、剛性設定前の状態の値を保持するようになる。また、所望湾曲部における剛性設定時の設定値記憶部74は、指令情報を制御部73に実時間で渡すように作用する。
このことにより、各湾曲部の干渉が生じても補正を行うことが可能となる。
なお、この補正演算部は、剛性指令制御実行時に、先端側のリンク部材21aの湾曲補正を行うだけでなく、剛性指令制御実行によって予想される他のリンク部材21の湾曲動作を補正するための演算処理も行うことが可能となる。
また、変形例2において、前記コントローラ5は、複数のリンク部材21を有する湾曲部14を剛性指令制御する場合、下記に示す剛性条件を満足するように剛性指令制御を行うようになっている。
例えば、湾曲部14が四つのリンク部材21a〜21dから構成されたものであるとすると、各リンク部材21の各剛性レベルの関係は、
四段目のリンク部材21d>三段目のリンク部材21c>二段目のリンク部材>先端側のリンク部材21a となる。
したがって、以上述べたように、変形例2の内視鏡装置は、湾曲部14が多関節のリンク構造を有する構成であっても、前記実施例1、実施例2及び変形例1と同様に、湾曲部14の湾曲位置指令制御を行った状態で、複数のリンク部材21の内、任意に指定されたリンク部材21に対し剛性指令制御を行うことが可能となる。
なお、変形例1では、湾曲部14の上下2つの湾曲方向について説明したが、これに限定されるものではなく、湾曲部14の上下左右4つの湾曲方向に湾曲動作可能に前記湾曲部14を構成すると同時に、これに伴い駆動部10bであるモータ及び湾曲操作ワイヤを設けて構成しても良い。
なお、本発明に係る実施例1では、前記複数のリンク部材21の内、先端側のリンク部材21aの2次元における位置と向きをポイントロックすることについて説明したが、これに限定されるものではなく、3次元における位置と向きをポイントロックするように構成しても良い。
また、本発明に係る実施例1において、マニピュレータを構成する挿入部駆動機構20を有する湾曲部14は、内視鏡2の挿入部9に設けられたものとして説明したが、前記湾曲部14は内視鏡2の挿入部9を挿通させて管腔内に対する挿入部9の挿入を補助する内視鏡挿入補助具の挿入部に設けて構成しても良い。
本発明は、以上述べた実施例1、2及び変形例1、2のみに限定されるものではなく、発明の要旨を逸脱しない範囲で種々変形実施可能である。
本発明の医療用制御装置を用いて内視鏡装置として構成した場合のシステム構成図。
内視鏡装置の主要構成部分の電気的な構成を示すブロック図。
リンク構造の駆動機構を備えた湾曲部を有する挿入部先端側の斜視図。
リンク構造の駆動機構を備えた湾曲部を有する挿入部先端側の断面図。
駆動機構が湾曲操作ワイヤ、駆動用プーリ及びフリープーリで構成された湾曲部の構成を示す上面図。
図5に示す湾曲部の各リンク部材間に設けられた湾曲操作ワイヤの懸架状態を示す側面図。
図5の駆動軸を備えた駆動用プーリの構成を示す構成図。
図5のフリープーリの構成を示す上面図。
コントローラ、駆動部及び挿入部駆動機構部を有する主要部部の制御ブロック図。
図9に示す前記指令制御部及びアクチュエータ制御ブロックの具体的な構成を示すブロック図。
アクチュエータ制御ブロックの具体的な構成を示すブロック図。
図11のサーボ制御コントローラのブロック線図。
先端部側のリンク部材が所定の先端位置及び姿勢ベクトルの状態である説明図。
図13のリンク部材の姿勢状態である場合に予想される他のリンク部材の状態を示す説明図。
先端部側のリンク部材のみを独立的に姿勢制御した所定の位置及び姿勢ベクトルの状態を示す説明図。
サーボ制御コントローラの概略構成を示すブロック図。
図16の制御則演算部の具体的な構成を示すブロック図。
図17のダイナミックス演算部の概略構成を示すブロック図。
図18のダイナミックス演算部の具体的な構成を示すブロック図。
図17の運動学演算部の概略構成を示すブロック図。
図20の運動学演算部の具体的な構成を示すブロック図。
挿入部の挿入時に伴う挿入部の物理的な特性を示す説明図。
先端側のリンクを固定した場合の他のリンク部材の姿勢状態を示す説明図。
最適な関節トルク指令値信号を得るための係数である重み関数の一例を示すグラフ。
重み関数の変形例1の特性を示すグラフ。
重み関数の変形例2の特性を示すグラフ。
重み関数の変形例3の特性を示すグラフ。
重み関数の変形例4の特性を示すグラフ。
重み関数の変形例5の特性を示すグラフ。
本発明の実施例1に係り、内視鏡装置1のコントローラ5の具体的な構成を示すブロック図。いる。さらに、図39は本実施例の各アクチュエータ制御ブロック内のサーボ制御コントローラの構成を示すブロック線図で
挿入部駆動機構部の姿勢制御を説明するもので、先端側のリンク部材をポイントロックした状態を示す説明図。
先端側のリンク部材をポイントロックすることにより次段のリンク部材が冗長性を有している状態を示す説明図。
図30のポイントロック演算部の具体的な構成を示すブロック図。
図33の逆運動学演算部の具体的な構成を示すブロック図。
先端側のリンク部材のみポイントロックしたときの姿勢状態を説明する図。
湾曲操作ワイヤの牽引又は弛緩によりリンク部材を湾曲動作させる場合の問題点を説明するための説明図で、複数のリンク部材が非湾曲動作時である状態を示す図。
二段目のリンク部材を90度湾曲させた時に先端側のリンク部材が干渉によって湾曲してしまう状態を示す図。
負荷検出部からの検出結果と重み関数を決定する係数との特性を示すグラフ。
本実施例のコントローラによって図37に示す状態から先端側のリンク部材を90度逆方向に補正制御した状態を示す図。
本発明の実施例2に係り、実施例2の内視鏡装置全体の構成を示す構成図。
コントローラにより湾曲駆動されたときの湾曲部の特性を説明する説明図。
実施例2のコントローラによって剛性制御されたときの湾曲部の特性を説明する説明図。
実施例2の変形例1に係り、変形例1の内視鏡装置全体の構成を示す構成図。
変形例1のサーボ制御コントローラ内の具体的な構成を示すブロック図。
変形例1のコントローラによって剛性制御されたときの湾曲部の特性を説明する説明図。
図44の湾曲用制御部を示すブロック線図。
図47は図44の剛性制御用制御部を示すブロック線図。
実施例2の変形例2に係り、変形例2の内視鏡装置全体の構成を示す構成図。
変形例2のコントローラによって剛性制御されたときの湾曲部の特性を説明する説明図。
変形例2の作用を説明するための作用原理図。
変形例2の制御部を示すブロック線図。
符号の説明
1…内視鏡装置、
2…内視鏡、
3…光源装置、
4…ビデオプロセッサ、
5…コントローラ、
6…モニタ、
5A…指令制御部、
7…操作指令部、
7A…剛性設定ダイアル、
7a…ジョイスティック、
8…設定値指令部、
9…挿入部、
10…操作部、
10b…駆動部、
13…先端部、
14…湾曲部、
20…挿入部駆動機構(マニピュレータ)、
20a〜20n…関節部材、
21a〜21n…リンク部材、
27a、27b…モータ、
30A〜30D、30a〜30f…湾曲操作ワイヤ、
31…アクチュエータ制御ブロック、
31a〜31n…アクチュエータ制御ブロック、
36A…サーボ制御コントローラ、
36B…制御則演算部、
37…制御指令値出力部、
37a…ドライバ、
38…センサ、
39…信号入力部、
39a…検知部、
40…PD制御部、
41…運動学演算部、
42…制御演算部、
43…ダイナミックス演算部、
44…順運動学演算部、
45、46…時間微分演算部、
47…ヤコビアン演算部、
48…疑似逆行列演算部、
49…ヤコビアン零空間演算部、
50…ポイントロック演算部、
50A〜50C…ポイントロック演算部、
51…先端リンク根元座標位置計算部、
52…逆運動学演算部、
53…機構パラメータ演算部、
54…順運動学演算部、
55…ヤコビアン演算部、
56…アンプ、
57…行列演算部、
58…積分回路、
60、60A、60B…位置指令変化量補正部、
61a、61b…ギア
62a、62b…スプロケット、
63a、63b…テンションセンサ、
64…切替部、
70…モード判別部、
71…PID制御部、
72…P制御部。