JP4727975B2 - Medical system - Google Patents
Medical system Download PDFInfo
- Publication number
- JP4727975B2 JP4727975B2 JP2004344650A JP2004344650A JP4727975B2 JP 4727975 B2 JP4727975 B2 JP 4727975B2 JP 2004344650 A JP2004344650 A JP 2004344650A JP 2004344650 A JP2004344650 A JP 2004344650A JP 4727975 B2 JP4727975 B2 JP 4727975B2
- Authority
- JP
- Japan
- Prior art keywords
- imaging
- image
- rotation angle
- magnetic field
- timing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images



















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00147—Holding or positioning arrangements
- A61B1/00158—Holding or positioning arrangements using magnetic field
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
- A61B1/041—Capsule endoscopes for imaging
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/73—Manipulators for magnetic surgery
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- General Health & Medical Sciences (AREA)
- Heart & Thoracic Surgery (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Animal Behavior & Ethology (AREA)
- Biomedical Technology (AREA)
- Molecular Biology (AREA)
- Medical Informatics (AREA)
- Optics & Photonics (AREA)
- Biophysics (AREA)
- Physics & Mathematics (AREA)
- Radiology & Medical Imaging (AREA)
- Pathology (AREA)
- Robotics (AREA)
- Endoscopes (AREA)
Description
本発明は、体腔内で医療装置本体を回転して推進させる医療システムに関する。 The present invention relates to a medical system for rotating and propelling a medical device body in a body cavity.
体腔内に挿入される医療装置を回転させることにより、推進力を発生させる等して体腔内を検査する各種の医療装置が提案されている。
例えば、特開2003−299612号公報には、カプセル内視鏡を回転磁界により回転させることにより、管腔内を誘導させるカプセル内視鏡システムが開示されている。 この従来例では、カプセル内視鏡により撮像して得られた画像データを体外の画像処理装置に送信し、画像処理装置は受信した画像データと、この受信した画像データと関連付けて回転磁界のデータとを関連付けてメモリ等に記憶する。
Various medical devices for inspecting the inside of a body cavity by generating a driving force by rotating the medical device inserted into the body cavity have been proposed.
For example, Japanese Patent Laid-Open No. 2003-299612 discloses a capsule endoscope system that guides the inside of a lumen by rotating a capsule endoscope with a rotating magnetic field. In this conventional example, image data obtained by imaging with a capsule endoscope is transmitted to an image processing apparatus outside the body, and the image processing apparatus associates the received image data with the received image data, and data of a rotating magnetic field. Are stored in a memory or the like.
そして、回転磁界のデータを用いて画像の回転を補正する画像処理を行うことにより、回転しない状態で画像を表示する構成が開示されている。
しかしながら、上記従来例では、例えば画像データを体外の画像処理装置で取り込んだ際に、回転磁界の情報と関連付けるような構成に対しては、より精度良く回転補正を行う余地がある。
つまり、撮像を行うタイミングで、回転状態を検出する方がより精度良く回転補正を行えるが、従来例ではその構成が開示されていない。
However, in the above-described conventional example, there is room for more accurate rotation correction for a configuration in which, for example, when image data is captured by an image processing apparatus outside the body, the image data is associated with information on the rotating magnetic field.
In other words, the rotation correction can be performed with higher accuracy by detecting the rotation state at the timing of imaging, but the configuration is not disclosed in the conventional example.
(発明の目的)
本発明は、上述した点に鑑みてなされたもので、医療装置本体が回転されながら撮像を行う場合、より精度良く回転補正ができ、観察し易い画像が得られる医療システムを提供することを目的とする。
(Object of invention)
The present invention has been made in view of the above points, and an object of the present invention is to provide a medical system that can perform rotation correction with higher accuracy and obtain an image that can be easily observed when imaging is performed while the medical device body is rotated. And
本発明の医療システムは、体腔内に挿入される医療装置と、前記医療装置を挿入軸周りに回転させる医療装置用回転装置と、前記医療装置に設けられた撮像装置と、前記撮像装置が撮像を行った撮像タイミングに関連する信号を検出する撮像タイミング検出装置と、前記撮像タイミング検出装置の出力を受け前記撮像タイミングにおける前記医療装置用回転装置の回転角を取得する回転角取得装置と、前記回転角取得装置で取得した回転角の情報に基づき、前記撮像装置で撮像した画像を回転させる処理を行う画像取得装置と、を具備し、前記医療装置は、撮像タイミングコントローラを有し、前記撮像装置は、前記撮像タイミングコントローラの信号を受け、撮像を行うと共に、前記画像取得装置に画像データを送信し、前記撮像タイミング検出装置は、前記画像データの送信開始を検出することを特徴とする。 The medical system of the present invention includes a medical device inserted into a body cavity, a medical device rotating device that rotates the medical device around an insertion axis, an imaging device provided in the medical device, and the imaging device imaging An imaging timing detection device that detects a signal related to the imaging timing performed, a rotation angle acquisition device that receives an output of the imaging timing detection device and acquires a rotation angle of the medical device rotation device at the imaging timing, and An image acquisition device that performs a process of rotating an image captured by the imaging device based on information on the rotation angle acquired by the rotation angle acquisition device, the medical device includes an imaging timing controller, and the imaging The apparatus receives the signal of the imaging timing controller and performs imaging, and transmits image data to the image acquisition apparatus, and the imaging timing Detection device, and detects the start of transmission of the image data.
本発明によれば、実際に撮像を行うタイミングにおける回転角の情報を用いることにより、精度良く回転補正ができ、観察し易い画像が得られる。 According to the present invention, by using information on the rotation angle at the timing of actual imaging, rotation correction can be performed with high accuracy and an image that can be easily observed can be obtained.
以下、図面を参照して本発明の実施例を説明する。 Embodiments of the present invention will be described below with reference to the drawings.
図1から図10は本発明の実施例1に係り、図1は本発明の実施例1のカプセル型医療システムの全体構成を示し、図2は図1におけるカプセル型医療システムの各部の内部構成を示し、図3はカプセル本体の側面及び正面図を示し、図4は操作入力装置の概略の構成及び変形例等を示し、図5は回転磁界の法線ベクトルを示す座標系と、ジョイスティックを傾動操作した場合のカプセル本体の推進方向等を示す。
また、図6は変形例におけるスティックとその傾動操作によるカプセル本体の推進方向を示し、図7は本実施例の動作をタイミングチャートで示し、図8は本実施例の動作をフローチャートで示し、図9は第1変形例の動作を示し、図10は第2変形例のカプセル型医療システムの構成を示す。
1 to 10 relate to the first embodiment of the present invention, FIG. 1 shows the overall configuration of the capsule medical system of the first embodiment of the present invention, and FIG. 2 shows the internal configuration of each part of the capsule medical system in FIG. 3 shows a side view and a front view of the capsule body, FIG. 4 shows a schematic configuration and modification of the operation input device, and FIG. 5 shows a coordinate system indicating a normal vector of the rotating magnetic field and a joystick. The capsule body propulsion direction and the like when tilting is shown.
6 shows the stick in the modified example and the propulsion direction of the capsule body by its tilting operation, FIG. 7 shows the operation of this embodiment in a timing chart, FIG. 8 shows the operation of this embodiment in a flowchart, and FIG. 9 shows the operation of the first modification, and FIG. 10 shows the configuration of the capsule medical system of the second modification.
図1及び図2に示すように、本発明の実施例1のカプセル型医療システム1は、図示しない患者の体腔内に口部から挿入され、体腔内を撮像するカプセル型内視鏡として機能するカプセル型医療装置本体3(以下、カプセル本体と略記)と、患者の周囲、つまり体外に配置され、カプセル本体3に回転磁界を印加する回転磁界発生装置4及びこの回転磁界発生装置4に回転磁界を発生させる駆動電流の供給制御を行う磁界発生制御装置(或いは電源制御装置)5とからなる磁界発生装置9とを有する。
本実施例では患者の体腔内に口部から挿入されるカプセル型医療装置を例としているが、患者の体腔内に肛門から挿入されるカプセル型医療装置であっても良い。
As shown in FIGS. 1 and 2, the capsule
In this embodiment, the capsule medical device inserted into the body cavity of the patient from the mouth is taken as an example, but the capsule medical device inserted from the anus into the body cavity of the patient may be used.
また、カプセル型医療システム1は、患者の体外に配置され、カプセル本体3と無線通信を行う処理を行うと共に、磁界発生制御装置5を制御して、カプセル本体3に印加される回転磁界の方向や大きさ等を制御する処理を行う処理装置6と、この処理装置6に接続され、カプセル本体3により撮像した画像等を表示する表示装置7と、処理装置6に接続され、術者などの操作者が操作することにより、操作に対応した指示信号を指示入力する操作入力装置8としての、例えば磁界方向の指示信号を発生する方向入力装置8a、操作に対応した回転周波数の回転磁界の指示信号を発生する速度入力装置8b、操作に対応して偏芯した回転磁界の発生など、設定された機能に対応した指示信号を発生する機能ボタン8cとを有する。
The capsule
図3に示すように、カプセル本体3は、カプセル形状で、体腔内に挿入される挿入部を形成する外装容器11の外周面に、回転により、体腔内壁(管腔内壁)に接触して推力を発生する推力発生構造部となる螺旋状突起(或いはスクリュウ部)12が設けてある。また、この外装容器11で密閉された内部には撮像手段を構成する対物光学系13及びその結像位置に配置された撮像素子14と、撮像を行うために照明を行う照明素子15(図2参照)等の他に、このカプセル本体3を磁気的に回転させるためのマグネット16が収納されている。
図3に示すように対物光学系13は、円筒状のカプセル本体3の中心軸C上にその光軸が一致するようにして、例えば外装容器11における半球状に透明にされた先端カバー11aの内側に配置されており、先端カバー11aの中央部分が図3(B)に示すように観察窓17となる。なお、図3では示していないが、照明素子15は対物光学系13の周囲に配置されている。
As shown in FIG. 3, the
As shown in FIG. 3, the objective
従って、この場合には、対物光学系13視野方向は対物光学系13の光軸方向、つまりカプセル本体3の円筒状の中心軸Cに沿った方向となる。
また、カプセル本体3内の長手方向の中央付近に配置されたマグネット16は、図3に示すように中心軸Cと直交する方向にN極及びS極が配置されている。この場合、マグネット16の中心は、このカプセル本体3の重心位置に一致するように配置され、外部から磁界を印加した場合にマグネット16に作用する磁気的な力の中心がカプセル本体3の重心位置となり、磁気的にカプセル本体3を円滑に推進させやすい構成にしている。
また図3(B)に示すように、撮像素子14の特定の配置方向に一致するように配置されている。
つまり、撮像素子14により撮像された画像が表示される場合の上方向が、マグネット16のS極からN極に向かう方向に設定されている。
Accordingly, in this case, the visual field direction of the objective
Further, the
As shown in FIG. 3B, the
That is, the upward direction when the image captured by the
そして、回転磁界発生装置4により回転磁界をカプセル本体3に印加することにより、マグネット16を磁気的に回転させ、このマグネット16を内部に固定したカプセル本体3をマグネット16と共に回転させ、その際カプセル本体3の外周面に設けた螺旋状突起12は体腔内壁に接触して回転され、カプセル本体3を推進させることができるようにしている。
また、このように、外部磁界によりマグネット16を内蔵したカプセル本体3を制御するようにした場合には、外部磁界の方向からカプセル本体3により撮像された画像の上方向がどの方向であるかを知ることができるようにしている。
The rotating
In addition, in this way, when the
カプセル本体3内には、上述した対物光学系13、撮像素子14、マグネット16の他に図2に示すように、撮像素子14で撮像された信号に対してデジタル信号に変換して圧縮処理を行う信号処理回路20と、信号処理回路20により生成された圧縮処理されたデジタルの画像データを一時記憶するメモリ21と、メモリ21から読み出した画像データを高周波信号で変調して無線送信する信号に変換したり、処理装置6から送信される制御信号を復調等する無線回路22と、照明素子15及び撮像素子14の駆動制御や信号処理回路20等、カプセル本体3内の各部を制御するカプセル制御回路23と、信号処理回路20等のカプセル本体3内部の電気系に動作用の電源を供給する電池24とが収納されている。
また、このカプセル本体3と無線通信を行う処理装置6は、前記無線回路22と双方向の無線通信を行う無線回路25と、この無線回路25と接続され、カプセル本体3に対して画像取得の制御信号を送る処理やカプセル本体3から送られた画像データに対する信号処理を行うと共に、画像回転処理等を行う画像取得回路26と、操作入力装置8からの指示入力に応じて磁界発生制御装置5等を制御する磁界制御回路27とを有する。
In the
The
また、この処理装置6は、前記磁界発生制御装置5を介して回転磁界発生装置4により発生される回転磁界の状態、より具体的には回転磁界の法線ベクトルの向き(回転磁界の向きと略記)及びその回転磁界を形成する磁界の向きの情報を記憶する記憶回路28と、機能ボタン8c等による機能設定等を行う設定回路29とを有する。
また、この処理装置6は、画像取得回路26と接続され、カプセル本体3の撮像素子14による撮像タイミングの検出を行う撮像タイミング検出回路30と、この撮像タイミング検出回路30による撮像タイミングの時に、磁界制御回路27による磁界回転角の情報を取得する回転角度取得回路31と、を有し、この回転角度取得回路31は、取得した磁界回転角の情報を、例えば撮像タイミング検出回路30を介して画像取得回路26に出力する。
Further, the
In addition, the
そして、画像取得回路26は、無線回路25を経て取り込んだ画像データに対して、圧縮の解凍(画像伸長)処理の他に、回転角度取得回路31から磁界回転角の情報を得て、(カプセル本体3の撮像素子14により)回転して撮像された画像の回転補正を行う。 画像取得回路26は、撮像素子14により撮像され、無線回路22、25を経て取り込まれた画像が、所定の回転角の方向の画像となるように画像回転処理する。そして、カプセル本体3に内蔵された撮像素子14が回転しながら撮像した画像に対して、回転が行われなかった状態の所定方向の画像にして表示装置7に出力し、その所定方向の画像が表示されるようにする。
また、磁界制御回路27には、操作入力装置8を構成する方向入力装置8a、速度入力装置8b、機能ボタン8cから操作に対応した指示信号が入力され、磁界制御回路27は、指示信号に対応した制御動作を行う。
The
The magnetic
また、磁界制御回路27は、記憶回路28と接続され、記憶回路28に磁界発生制御装置5を介して回転磁界発生装置4により発生する回転磁界の向き及び磁界の向きの情報を常時記憶するようにしている。そして、その後に、回転磁界の向きや磁界の向きを変化させる操作が行われた場合にも、回転磁界の向きや磁界の向きを連続的に変化させ、円滑に変化させることができるようにしている。なお、記憶回路28を、磁界制御回路27内部に設けるようにしても良い。
また、磁界制御回路27と接続された磁界発生制御装置5は、交流電流を発生すると共に、その周波数や位相を制御する3個の交流電流発生&制御回路からなる交流電流発生&制御部33と、各交流電流をそれぞれ増幅する3個のドライバからなるドライバ部34とを有し、3個のドライバの出力電流は回転磁界発生装置4を構成する3個の電磁石35a、35b、35cにそれぞれ供給される。
In addition, the magnetic
The magnetic field generation control device 5 connected to the magnetic
この場合、電磁石35a、35b、35cは、図1に示すように直交する3軸方向の磁界を発生するように配置されている。
そして、図4(A)に示す操作入力装置8を構成する方向入力装置8aを操作することにより、磁界方向の指示信号を発生したり、速度入力装置8bを操作することにより操作に対応した回転周波数の回転磁界の指示信号を発生したり、機能ボタン8cを操作することにより偏芯した回転磁界を発生したりすることができるようにしている。
具体的には、操作入力装置8は操作箱の上面から上方に突出するジョイスティックSaで形成された方向入力装置8aと、スティックSbにより形成された速度入力装置8bと、例えば2つのボタンTa,Tbで形成された機能ボタン8cとから構成される。
In this case, the
Then, by operating the direction input device 8a constituting the
Specifically, the
そして、図5(A)に示すように直交する座標系を設定して、回転磁界の回転面の法線ベクトルNの方向を表した場合、この法線ベクトルNの方向がカプセル本体3の推進方向となり、この方向をジョイスティックSaの傾動操作で設定できるようにしている。
この場合、図5(B)に示すように、ジョイスティックSaを前側、後側、左側、右側に向けて傾動することにより、下側、上側、左側、右側に推進方向を変更できるようにしている。この場合の傾動する量が角度変化のスピードに相当する。尚、中間方向(例えば左下方向や右上方向)に傾ければ、当然その方向に推進方向を変更できる。
また、図5(C)に示すように、スティックSbを前側、後側に傾動することにより、それぞれ前側及び後方側に回転方向を設定でき、かつ傾ける角度で回転周波数を変化できるようにしている。
Then, when an orthogonal coordinate system is set as shown in FIG. 5A to represent the direction of the normal vector N of the rotating surface of the rotating magnetic field, the direction of the normal vector N is the propulsion of the
In this case, as shown in FIG. 5B, the propulsion direction can be changed to the lower side, the upper side, the left side, and the right side by tilting the joystick Sa toward the front side, the rear side, the left side, and the right side. . The amount of tilting in this case corresponds to the speed of angle change. In addition, if it inclines in an intermediate direction (for example, a lower left direction or an upper right direction), naturally a propulsion direction can be changed to that direction.
Further, as shown in FIG. 5C, by tilting the stick Sb to the front side and the rear side, the rotation direction can be set to the front side and the rear side, respectively, and the rotation frequency can be changed at the tilt angle. .
また、ボタンTaは回転磁界の方向を偏芯させる(つまり、回転磁界の方向をある1方向から偏芯角度だけ偏芯させるようにして回転磁界の方向が円錐状に変化する)ように発生させる回転磁界の偏芯開始の指示信号を発生し、この回転磁界の偏芯によりカプセル本体3に内蔵されたマグネット16は(回転する独楽の心棒がぶれるように回転する)いわゆるジグリング或いは才差運動を開始することになる。
従って、ボタンTaはジグリングの開始の指示信号として機能し、ボタンTbは回転磁界の偏芯停止の指示信号、従ってジグリングを停止させる指示信号を発生する。なお、磁界強度やジグリングを指示する場合のジグリングの角度(後述する角度φ)の値やそのジグリングを行う場合の周波数の設定は、設定回路29の機能により、予め設定できるようにしている。
Further, the button Ta is generated so as to decenter the direction of the rotating magnetic field (that is, the direction of the rotating magnetic field changes to a conical shape by decentering the rotating magnetic field from a certain direction by an eccentric angle). An instruction signal for starting the eccentricity of the rotating magnetic field is generated, and the
Accordingly, the button Ta functions as an instruction signal for starting jiggling, and the button Tb generates an instruction signal for stopping eccentricity of the rotating magnetic field, and thus an instruction signal for stopping jiggling. It should be noted that the setting of the value of the jiggling angle (angle φ, which will be described later) when instructing the magnetic field strength and the jiggling and the frequency when performing the jiggling can be set in advance by the function of the setting
また、操作入力装置8として図4(A)に示すものの変形例として図4(B)に示すようにジョイスティックScの頂部側に傾動可能で、倒す量により回転磁界の回転周波数を変化させることによりカプセル本体3の回転速度を変化させるレバーLaと、回転磁界の回転方向をON/OFFで指示するボタンTcと、回転磁界の偏芯機能としての機能ボタンTd(1つの場合にはOFFからONと、ONの場合にはONからOFFの機能を持つ)を設けるようにしても良い。
このようにすると、片手で操作することができ、図4(A)の両手で操作することが必要になる場合よりも操作性を向上することができる。
また、図4(A)において、例えばスティックSbの代わりに図4(C)に示すフットスイッチFを採用し、踏み込む量で回転周波数を変更するようにしても良い。
Further, as a modification of the
In this way, it can be operated with one hand, and operability can be improved as compared with the case where it is necessary to operate with both hands in FIG.
In FIG. 4A, for example, a foot switch F shown in FIG. 4C may be adopted instead of the stick Sb, and the rotation frequency may be changed by the amount of depression.
図4(B)に示すジョイスティックScを採用した場合におけるその操作機能等の説明図を図6で示している。図6(A)は図4(B)における機能ボタンTdを除いた構成例を示し、図6(B)はジョイスティックScの傾動操作による推進方向を変化する機能を示し、図6(C)はカプセル本体3に対して実際に推進方向等を変更する動作説明図を示す。
この場合には、図6(A)に示すジョイスティックScの傾動操作により、回転磁界の発生方向を変更して、カプセル本体3の推進方向を変更する機能を図6(B)に示す。本実施の形態では、図6(B)(或いは図5(B))に示すようにジョイスティックScを傾動する操作方向にカプセル本体3を推進させることができるように回転磁界の発生方向を制御するようにしている。
FIG. 6 shows an explanatory diagram of the operation function and the like when the joystick Sc shown in FIG. 4B is employed. 6A shows an example of the configuration excluding the function button Td in FIG. 4B, FIG. 6B shows the function of changing the propulsion direction by the tilting operation of the joystick Sc, and FIG. The operation | movement explanatory drawing which actually changes a propulsion direction etc. with respect to the capsule
In this case, FIG. 6B shows a function of changing the propulsion direction of the
また、レバーLaを倒す量で回転周波数を変化させ、ボタンTcをOffの状態では前進させるような回転磁界を、Onの状態では後退させるような(前進とは逆回転の)回転磁界を発生させるように制御する。
図6(B)に示すように推進方向を円滑に変更するためには、カプセル本体3の状態或いは回転磁界の状態を常時把握していることが必要となる。本実施の形態では、回転磁界の状態(具体的には、回転磁界の向き及び磁界の向き)を記憶回路28に常時記憶するようにしている。
具体的には、図2における第1の操作入力手段である操作入力装置8における操作の指示信号は、磁界制御回路27に入力され、この磁界制御回路27は、指示信号に対応した回転磁界を発生させる制御信号を磁界発生制御装置5に出力すると共に、その回転磁界の向き及び磁界の向きの情報を記憶回路28に記憶する。
In addition, the rotation frequency is changed by the amount by which the lever La is tilted, and a rotating magnetic field that causes the button Tc to move forward in the Off state and a rotating magnetic field that causes the button Tc to move backward (reverse to forward) is generated. To control.
As shown in FIG. 6B, in order to smoothly change the propulsion direction, it is necessary to constantly grasp the state of the
Specifically, the operation instruction signal in the
従って、記憶回路28には、回転磁界発生装置4により発生される回転磁界及びその回転磁界を形成する周期的に変化する磁界の向きの情報が常時記憶されるようになっている。
なお、記憶回路28は、磁界制御回路27からの回転磁界の向き及び磁界の向きの制御信号に対応する情報を記憶する場合に限定されるものでなく、磁界制御回路27から磁界発生制御装置5に出力された制御信号により、磁界発生制御装置5における交流電流発生&制御部33及びドライバ部34を経て回転磁界発生装置4に実際に出力される回転磁界の向き及び磁界の向きを決定する情報を磁界発生制御装置5側から磁界制御回路27に送り、記憶回路28に記憶するようにしても良い。
Therefore, the
The
また、本実施例では、回転磁界の印加開始時及び印加停止時や回転磁界の向き(換言するとカプセル本体の進行方向の向き)等を変更する場合には、カプセル本体3に急激な力が作用することなく円滑に作用するように回転磁界を連続的に変化させるように制御するようにしている。
このように制御することにより、回転磁界の印加開始時及び回転磁界の印加停止時においてもカプセル本体3の動作を円滑に維持できるようにしている。
本実施例では、医療装置本体としてのカプセル本体3を回転磁界を使用して誘導する際に、現在のカプセル本体3の進行方向を決定する回転磁界の状態の情報を記憶回路28に記憶し、その進行方向を変更する場合には、記憶回路28に記憶した現在の情報を参照して次の進行方向に進行させるように回転磁界を連続的に変化させるように制御することで、医療装置本体の誘導操作を自然な操作を行うことができる様にしている。
Further, in this embodiment, when the application of the rotating magnetic field is started and stopped, or when the direction of the rotating magnetic field (in other words, the direction of the capsule body in the traveling direction) is changed, a sudden force acts on the
By controlling in this way, the operation of the
In this embodiment, when the
また、記憶回路28に、回転磁界の情報を記憶する場合、その回転磁界の情報を記憶した時間の情報を関連付けて記憶することにより、後述する実施例のように撮像したタイミングを検出した時刻よりも、以前(過去)の回転角度情報が必要になった場合にも、精度良く対応する回転角度情報を得ることができるようにしている。
また、カプセル本体3が回転駆動されながら体内を推進するため、カプセル本体3によりそのまま撮像された画像は、回転した画像となる。このため、本実施例では回転した画像に対して画像回転処理を行い、常時、回転が行われなかったのに等しい所定方向の画像に補正して表示装置7にて表示するようにしている。
本実施例では、体外装置を構成する画像取得回路26は、カプセル本体3に対して撮像させる指示信号としての撮像要求の信号を送信し、この撮像要求の信号によりカプセル本体3による撮像を行わせる。
In addition, when storing information on the rotating magnetic field in the
In addition, since the
In the present embodiment, the
また、この画像取得回路26は、撮像要求の信号を送信するタイミングにおいて、撮像タイミング検出回路30に対して、撮像(要求)の送信時のタイミング信号を送り、撮像タイミング検出回路30は、このタイミング信号を撮像タイミングとして検出する。
そして、タイミング検出回路30は、このタイミング信号を受けると、直ちに、回転角度取得回路31を介して磁界制御回路27に対して、そのタイミング時における回転磁界によるカプセル本体3を回転させる回転角度情報を出力させるための回転角度情報出力要求の信号を送り、磁界制御回路27から回転角度情報を出力させる。
なお、上述したようにカプセル本体3内には、撮像素子14の所定方向と、その両磁極間の方向が一致するようにマグネット16が配置されているため、発生される回転磁界の方向にマグネット16の両磁極の方向が追従することからカプセル本体3の撮像素子14による撮像方向、つまり撮像された画像の方向を決定することができる。また、所定の方向を基準として、どれだけ回転しているかの回転角度を決定することができる。
In addition, the
Upon receiving this timing signal, the
As described above, since the
そして、回転角度取得回路31は、磁界制御回路27から出力される(回転磁界発生装置4による回転磁界によるカプセル本体3を回転させる)回転角度の情報、つまり回転角度情報を取得する。この回転角度取得回路31は、取得した回転角度情報を保持し、画像取得回路26がカプセル本体3から画像データを受けた際にその回転角度情報を(撮像タイミング検出回路30を介して或いは直接)画像取得回路26に送る。
そして、画像取得回路26は、この回転角度情報により、受け取った画像データに対して、所定の回転角度まで画像を回転する画像回転処理を行った後、表示装置7に出力する。このようにして表示装置7には、常時回転しない(所定の回転角度の方向に揃えた)画像を表示し、ユーザは、カプセル本体3が回転して撮像していることを意識することなく回転しない状態で撮像されている如くの(観察し易い)画像を観察することができる構成にしている。
このような構成による本実施例の作用を説明する。
Then, the rotation
Then, the
The operation of the present embodiment having such a configuration will be described.
まず、本実施例による概略の作用を説明する。カプセル本体3により体腔内を検査する場合、患者は、このカプセル本体3を飲み込む。体腔内に挿入されたカプセル本体3は、食道等の体腔内を通過する際に、処理装置6から送信される撮像要求の信号に同期して、照明素子15で照明し、撮像素子14により撮像する。撮像素子14により撮像された画像は、信号処理回路20により圧縮処理された後、無線回路22を経て体外の処理装置6に無線で送信される。
処理装置6は、無線回路25で受信し、復調した画像データを画像取得回路26に送る。画像取得回路26は、その内部などに設けた(メモリ或いはハードディスク等の)画像記憶デバイスに蓄積すると共に、解凍処理、画像回転処理、補間処理を行い、表示装置7には、カプセル本体3により順次撮像された画像を常時、回転しない所定(基準)の回転角度の状態で表示する。
First, the general operation of the present embodiment will be described. When examining the inside of a body cavity with the
The
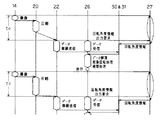
次に図7を参照してカプセル本体3による撮像からその撮像された画像に対して回転補正を行って表示するまでの動作を詳細に説明する。なお、図7における上から下方向が時間の経過を示す。図9、図11、図13、図15等の他のタイミングチャートも同様である。
図7に示すように、処理装置6における画像取得回路26は、所定の撮像周期に同期して、撮像要求の信号を無線回路25を経てカプセル本体3に送信すると共に、そのタイミングで撮像タイミング検出回路30にタイミング信号を送る。
カプセル本体3は、撮像要求の信号を無線回路22を経てカプセル制御回路23内に取り込む。そして、カプセル制御回路23は、撮像要求の命令であると判定して、照明素子15を発光させると共に、撮像素子14に対して駆動信号を印加して、照明素子15の発光により照明された部位を撮像した撮像信号を出力させる。
Next, with reference to FIG. 7, the operation from the imaging by the
As shown in FIG. 7, the
The
この撮像信号は、信号処理回路20により信号処理され、A/D変換された後、さらに圧縮処理され、メモリ21に格納される。メモリ21に圧縮されて格納された画像データは、無線回路22により変調され、電波により画像データの無線送信が行われ、この画像データは、体外の処理装置6の無線回路25を経て、復調されて画像取得回路26に取り込まれる(受信される)。
一方、撮像タイミング検出回路30は、タイミング信号を受けると、このタイミングを撮像タイミングとして検出し、このタイミングにおける回転磁界の情報を得るために直ちに磁界制御回路27に対して回転角度情報出力要求の信号を送り、磁界制御回路27は、この信号が入力されたタイミングにおける回転磁界の回転角度情報を回転角度取得回路31に出力する。
なお、図7では、撮像要求の信号を送信してから撮像素子14が実際に撮像を行う時間までの遅れ時間を考慮して、磁界制御回路27は、回転角度出力要求の信号の入力タイミングから、前記遅れ時間に相当する時間、後の回転角度情報を出力するようにしている。このため、図7の点線で示すように撮像を行っている時間の中央のタイミングに一致するように磁界制御回路27から回転角度情報が出力されることになる。
The image signal is subjected to signal processing by the
On the other hand, when receiving the timing signal, the imaging
In FIG. 7, in consideration of a delay time from when the imaging request signal is transmitted to when the
なお、このように撮像要求の信号から実際に撮像を行うまでに遅れ時間が発生する場合、その影響を磁界制御回路27側で考慮した補正を行う場合に限定されるものでなく、例えば撮像タイミング検出回路30が、撮像要求のタイミングから上記遅れ時間だけ後に磁界制御回路27に対して、回転角度情報出力要求の信号を送るようにしても良い。
また、撮像要求から実際に撮像を行うまでの時間が短い場合には、上記遅れ時間を無視して回転角度情報を発生させるようにしても良い。
回転角度取得回路31は、磁界制御回路27が出力する回転角度情報を保持し、例えば画像取得回路26がカプセル本体3から送信される画像データの取り込みを終了したタイミングに、この回転角度情報を画像取得回路26に出力する。
In addition, when a delay time occurs from when an imaging request signal is actually captured to when the imaging request is made, the correction is not limited to the case where the influence is considered on the magnetic
In addition, when the time from the imaging request to the actual imaging is short, the rotation angle information may be generated ignoring the delay time.
The rotation
上記画像取得回路26は、取り込んだ圧縮されている画像データに対して、圧縮画像データの解凍を行い、さらに回転角度情報を参照して、回転して撮像された画像に対して基準の回転角の画像にするための画像回転処理、そして回転に伴って適宜に補間処理を行って、表示装置7により表示が可能な画像を生成し、表示装置7に出力する。
表示装置7は、画像取得回路26から出力された画像を表示することにより、回転補正がされて回転の影響が解消された状態で、撮像素子14により撮像された画像を表示する。例えば、撮像素子14の上方向が画像表示の際の上方向となるようにして、観察し易い画像が表示される。
そして、所定の時間が経過すると、画像取得回路26は、再び撮像要求の信号をカプセル本体3側に送信すると共に、そのタイミングで撮像タイミング検出回路30にタイミング信号を送り、上述した処理を繰り返す。
The
The
When a predetermined time elapses, the
なお、ここでは撮像素子14の上方向をマグネット16の磁極方向(S極からN極に向かう方向)に一致するように配置し、上方向に表示していたが、この配置関係(角度)は任意でも良い。例えば操作者が、初期設定で撮像素子14の上方向とマグネット16の磁極方向のなす角度を操作入力装置8により入力し、上記画像取得回路26が、回転角度情報を考慮して、初期設定で入力された角度を基準に画像回転処理をするようにしても良い。
または、カプセル本体3を回転磁界発生装置4の生成する回転磁界により回転させた状態において、操作者が表示画像を確認しつつ、画像の回転量を調整することにより、撮像素子14の上方向とマグネット16の磁極方向のなす角度を推定して、その角度を基準とした画像回転処理を画像取得回路26に行わせるようにしても良い。
Here, the upper direction of the
Alternatively, in the state where the
図7の処理内容は、図8に示すフローチャートのようになる。
ステップS1において、画像取得回路26は、撮像要求の信号をカプセル本体3に送信すると共に、タイミング信号を撮像タイミング検出回路30に出力し、撮像タイミング検出回路30はこのタイミングを撮像タイミングとして検出する。
ステップS2に示すようにカプセル本体3は、撮像要求の信号を受けて、照明素子15を発光させ、撮像素子14により撮像する撮像処理を行う。また、撮像タイミング検出回路30は、タイミング信号の検出で発生する回転角度情報出力要求の信号を磁界制御回路27に送ることにより、回転角度取得回路31は、その信号を送ったタイミング(或いは撮像要求から実際に撮像をするまでの時間遅延に相当するタイミング)で回転角度情報を得る。
The processing contents of FIG. 7 are as shown in the flowchart of FIG.
In step S1, the
As shown in step S <b> 2, the
ステップS3に示すようにカプセル本体3は、撮像処理により、撮像した画像データを送信し、画像取得回路26は、送信された画像データを取り込む。
そして、ステップS4に示すように画像取得回路26は、回転角度取得回路31から送られる回転角度情報を受け取り、取り込んだ画像データに対して、圧縮画像データの解凍、画像回転処理、補間処理を行った後、表示装置7に出力する。
ステップS5に示すように表示装置7は、画像取得回路26から入力された画像を表示することにより、回転しない状態に回転補正された画像を表示する。
そして、ステップS6に示すように画像取得回路26は(撮像タイミング検出回路30のタイマ出力により)所定時間が経過したかの判定を行い、所定時間の経過後にステップS1に戻り、再び撮像要求の信号をカプセル本体3側に送信すると共に、そのタイミングで撮像タイミング検出回路30にタイミング信号を送り、上述した処理を繰り返す。なお、この所定時間は、撮像する周期(フレームレート)に処理の時間を合わせる等に使用するものである。
このようにして、画像取得回路26は、撮像素子14により実際に撮像された画像に対して、その撮像のタイミングに高精度で一致する回転角度情報を用いて、所定の回転角度まで画像回転する画像回転処理を行い、所定の回転角度に揃えた状態で各画像を表示する。
As shown in step S3, the
Then, as shown in step S4, the
As shown in step S <b> 5, the
Then, as shown in step S6, the
In this way, the
従って、本実施例によれば、回転される撮像素子14により撮像された画像の場合においても、その撮像素子14により実質的に撮像されるタイミングを検出し、そのタイミングで、回転磁界の回転角度情報を検出する構成にしているので、簡単な構成で、回転しない状態に精度良く回転補正された画像を生成し、表示装置7によりその画像を表示することができる。
従って、観察者は、回転を意識することなく、所定の方向に揃った画像を観察することができ、観察し易いと共に、進行方向等を変更しようとする場合にも表示される画像の向きが一定しているので操作し易い。
また、カプセル本体3側において、画像の圧縮を行う場合においても、圧縮にかかる時間に影響されることなく、撮像するタイミングを検出できるため、従来例における受信したタイミングで画像の回転の補正を行う場合よりも、撮像されたタイミングにおける画像の回転を精度良く補正できる。
Therefore, according to the present embodiment, even in the case of an image captured by the rotated
Therefore, the observer can observe images aligned in a predetermined direction without being aware of rotation, and is easy to observe, and the orientation of the displayed image is also changed when trying to change the traveling direction or the like. Easy to operate because it is constant.
Further, even when the image is compressed on the
また、撮像のタイミングを体外に配置される処理装置6側から無線で送信することで制御できるので、撮像したいと思う部位を重点的に行う等の制御ができる。
次に本実施例の変形例を図9のタイミングチャートを参照して説明する。本変形例のハードウェアの構成は、図1及び図2と殆ど同様の構成である。異なる点は、画像取得回路26は、カプセル本体3に対して撮像要求を送信する時には、磁界制御回路27に対して直接、回転角度情報要求の信号を送り、磁界制御回路27からそのタイミング(或いは撮像要求から実際に撮像が行われるまでの時間遅延量だけ遅延したタイミング)に出力される回転角度情報を回転角度取得回路31が保持するように設定している。
また、本変形例では、画像取得回路26は、カプセル本体3から送信される画像データの受信が終了したタイミングに、回転角度取得回路31に対して回転角度情報を要求する回転角度情報要求の信号を送り、回転角度取得回路31が保持している回転角度情報を受け取る。
In addition, since the timing of imaging can be controlled by wireless transmission from the
Next, a modification of the present embodiment will be described with reference to the timing chart of FIG. The hardware configuration of this modification is almost the same as that shown in FIGS. The difference is that the
In this modification, the
そして、画像取得回路26は、圧縮された画像データに対して解凍処理等を開始する直前に、カプセル本体3に対して撮像要求を送信すると共に、磁界制御回路27に対して回転角度情報出力要求の信号を送るようにする。
つまり、実施例1においては、画像取得回路26は、圧縮された画像データに対して解凍処理等を終了した後に、カプセル本体3に対して撮像要求を送信していたが、本変形例では、画像取得回路26は、圧縮された画像データに対して解凍処理等を開始する直前に、カプセル本体3に対して撮像要求を送信する。
このようにすることにより、実施例1の場合よりも、画像取得回路26が圧縮された画像データに対して解凍処理等を行っている時間に、並行してカプセル本体3側で撮像及び信号処理させることができ、撮像周期の時間間隔を短くすることができるようにしている。
The
That is, in the first embodiment, the
By doing in this way, imaging and signal processing are performed on the
本変形例によれば、より短い撮像周期で撮像ができる、換言すると、撮像のフレームレートを向上できると共に、それぞれ撮像された画像を回転補正して表示する表示周期の時間間隔も短くすることができ、より動画に近い状態の画像を表示できる。その他は、実施例1の場合と同様の効果を有する。
なお、本実施例(変形例も含む)及び以下の実施例等において、処理装置6内の撮像タイミング検出回路30と回転角度取得回路31とを一体化しても良い。
According to this modification, imaging can be performed with a shorter imaging cycle, in other words, the imaging frame rate can be improved, and the time interval of the display cycle in which each captured image is displayed after being rotationally corrected can be shortened. And can display images that are closer to moving images. The other effects are the same as those of the first embodiment.
In the present embodiment (including modifications) and the following embodiments, the imaging
次に本発明の実施例2を図10及び図11を参照して説明する。図10は本発明の実施例2のカプセル型医療システム1Bの構成を示す。
このカプセル型医療システム1Bは、カプセル本体3Bと、磁界発生装置9と、処理装置6Bと、表示装置7及び操作入力装置8とからなる。
カプセル本体3Bは、図2のカプセル本体3において、撮像素子14により撮像された撮像信号を、無線回路22により変調してアナログ信号で送信する構成にしている。つまり、図2におけるA/D変換と画像データの圧縮等を行う信号処理回路20及びメモリ21を省いた構成にしている。
また、カプセル制御回路23は、タイマ23aを内蔵し、カプセル本体3B側で、所定周期で撮像を行うように照明素子15及び撮像素子14を制御する。このカプセル制御回路23は、撮像素子14が撮像するタイミングを制御する撮像コントローラの機能を持つ。
Next, a second embodiment of the present invention will be described with reference to FIGS. FIG. 10 shows a configuration of a capsule
The capsule
The capsule
The
また、本実施例では、カプセル本体3Bは、撮像した画像を無線回路22により送信するのみであり、受信する機能を省いた構成になっている。
また、処理装置6Bは、カプセル本体3Bから送信される画像を受信し、その場合、画像を受信した先頭部分において撮像タイミングと見なして、タイミング信号を発生し、そのタイミング信号により磁界制御回路27から回転角度情報を取得する。そして、受信した画像に対して画像回転処理、補間処理を行い、カプセル本体3Bから受信した画像の回転補正を行って表示装置7に出力する処理を行う。
なお、処理装置6B側は、無線で送信される画像を受け取った時点で撮像タイミングを検出するため、撮像タイミングの検出精度を向上するために、磁界制御回路27から回転角度情報を出力させる際、無線送信による遅延時間だけ、以前のものを出力させるようにしても良い。
In the present embodiment, the
Further, the
Since the
その他の構成は図2の場合と同様の構成である。次に本実施例の動作を図11のタイミングチャートを参照して説明する。
本実施例では、カプセル本体3は、一定周期で撮像を行う。そして、撮像素子14により撮像した画像を無線回路22により高周波変調して、変調された画像を順次無線で送信する。処理装置6Bは、無線回路25により復調し、復調した画像を順次、画像取得回路26に送る。画像取得回路26は、無線回路25を経て受信(入力)される画像の先頭部分を検出すると、タイミング信号を撮像タイミング検出回路30に送る。画像の先頭部分を検出する場合、信号の先端を検出し易くするためにマークを付加しても良いし、マークを付加することなく、比較器等で閾値と比較して先端部分を検出するなどしても良い。
Other configurations are the same as those in FIG. Next, the operation of this embodiment will be described with reference to the timing chart of FIG.
In the present embodiment, the
撮像タイミング検出回路30は、そのタイミング信号を受けると、そのタイミング信号を撮像タイミングとして検出し、直ちに磁界制御回路27に対して回転角度情報出力要求の信号を送る。磁界制御回路27は、その信号の入力時における回転角度情報を出力し、回転角度取得回路31は、その回転角度情報を取得する。
また、画像取得回路26は、画像受信の終了を検出すると、直ちに回転角度取得回路31に対して、(回転角度取得回路31において)保持されている回転角度情報要求の信号を送り、その回転角度情報を取得する。画像受信の終了を検出する場合にも、終了を検出し易くするために上記のようにマークを付加しても良い。
画像取得回路26は、この回転角度情報を取得すると、画像回転処理と補間処理を行い表示装置7により表示可能な映像信号生成の処理を行い、その映像信号を表示装置7に出力する。そして、表示装置7には、回転補正がされた画像が表示される。
画像取得回路26が映像信号生成の処理を終了後に、カプセル本体3は次の撮像を開始する。そして、上記した処理を繰り返すことになる。
Upon receiving the timing signal, the imaging
Further, when detecting the end of image reception, the
When acquiring the rotation angle information, the
After the
本実施例によれば、カプセル本体3側で自動的に撮像を行い、体外の処理装置6Bは、カプセル本体3Bから送信される画像を受信し、その際受信した画像の先頭部分を撮像のタイミングとしてそのタイミングでの磁界制御回路27から回転角度情報を取得して、その回転角度情報を用いて画像回転処理を行うことにより、簡単な構成で回転しない画像を表示することができる。
また、受信した画像の先頭部分を検出したタイミングが実際に撮像するタイミングから遅れる場合には、その遅れ時間だけ以前の回転角度情報を取得するようにすれば、精度良く回転補正した画像を表示することもできる。
According to the present embodiment, the
In addition, when the timing at which the head portion of the received image is detected is delayed from the timing at which the image is actually captured, if the previous rotation angle information is acquired by the delay time, the image with the rotation corrected with high accuracy is displayed. You can also
次に本発明の実施例3を図12及び図13を参照して説明する。図12は本発明の実施例3のカプセル型医療システム1Cの構成を示す。
本実施例は、図9に示すカプセル本体3Bの場合と同様にカプセル本体3Cは、撮像した画像を送信する動作を行うが、実施例1の場合と同様に信号処理回路20及びメモリ21を内蔵し、圧縮した画像データを送信する。
また、本実施例では、圧縮した画像データを送信した後、設定された時間経過すると、次の撮像動作を開始するようにしている。つまり、処理装置6C側において、圧縮された画像データの解凍等の処理を行う動作と並行して、カプセル本体3C側は次の撮像動作を行うようにしている。
Next, a third embodiment of the present invention will be described with reference to FIGS. FIG. 12 shows a configuration of a capsule medical system 1C according to the third embodiment of the present invention.
In the present embodiment, the
In this embodiment, after the compressed image data is transmitted, the next imaging operation is started when a set time has elapsed. That is, on the
また、カプセル制御回路23は、図9の場合と同様にタイマ23aを内蔵している。そして、撮像素子14により撮像を開始してから圧縮を含む信号処理を行った後、撮像素子14により撮像を行ったタイミングから所定時間to経過後に、画像を送信するようにしている。
つまり、圧縮の時間が変動した場合においても、撮像素子14により撮像を開始したタイミング或いは撮像時間における中央のタイミングから常に、所定時間to経過後に、画像を送信する。
また、送信された画像を受信する処理装置6C側では、画像取得回路26は、送信された画像の先頭部分を検出すると、磁界制御回路27に対して回転角度情報出力要求の信号を送る。この場合、画像取得回路26は、磁界制御回路27に対して、この信号から所定時間toだけ、さかのぼった過去のタイミングの回転角度情報を出力させる回転角度情報出力要求の信号を送る。
The
That is, even when the compression time fluctuates, the image is always transmitted after a predetermined time to elapses from the timing at which imaging is started by the
On the
磁界制御回路27は、この信号を受け取ったタイミングから所定時間toだけさかのぼった過去の回転角度情報を記憶回路28から読み出して出力する。
そして、画像取得回路26は、所定時間toさかのぼった時刻での回転角度情報を用いて画像回転の処理を行う。このため、本実施例においては、磁界制御回路27に接続された記憶回路28は、少なくとも所定時間toだけ過去の回転角度情報までを常時記憶するようにしている。なお、画像取得回路26は、記憶回路28に対して所定時間toだけ、さかのぼったタイミングでの回転角度情報を出力させる回転角度情報出力要求の信号を送るようにしても良い。
その他の構成は、図9の場合と同様である。
The magnetic
Then, the
Other configurations are the same as those in FIG.
図13は、本実施例の動作のタイミングチャートを示す。図13に示すようにカプセル本体3Cは、ほぼ一定の周期で撮像を行い、撮像された画像は信号処理回路20によりA/D変換された後、圧縮される。そして、カプセル制御回路23は、撮像のタイミングから所定時間to経過すると、無線回路22から送信させる。
処理装置6Cは、無線回路25を経て画像取得回路26は、送信された画像データの先頭部分を検出すると、回転角度情報出力要求の信号を磁界制御回路27に対して回転角度情報出力要求の信号を、この信号から所定時間toだけ、さかのぼったタイミングでの回転角度情報を出力させる回転角度情報出力要求の信号を送る。
磁界制御回路27は、この信号を受け取ったタイミングから所定時間toだけさかのぼった回転角度情報を記憶回路28から読み出して出力する。この回転角度情報は回転角度取得回路31に保持され、画像取得回路26がカプセル本体3Cから送信される画像データの受信を終了した場合には、回転角度取得回路31に保持された回転角度情報を参照して画像回転処理等を行い、回転補正された画像を表示装置7にて表示する。
FIG. 13 shows a timing chart of the operation of this embodiment. As shown in FIG. 13, the
When the
The magnetic
一方、カプセル本体3C側は、画像データの無線送信が終了して、設定された時間が経過すると、次の撮像動作を開始することになる。
このように動作する本実施例によれば、双方向の無線通信を行うことなく、カプセル本体3Cから処理装置6Cに画像データを無線送信する構成の場合においても、カプセル本体3C側での撮像のタイミングを精度良く検出して、対応する回転角度情報を得ることができ、精度良く回転補正ができる。
また、カプセル本体3Cは、処理装置6C側がデータ解凍、画像回転処理等を行っている最中に次の撮像動作を行うことができるので、より短い時間間隔で撮像を行うことができる。
また、本実施例の場合も、回転補正により、所定方向に揃った画像を表示できるので、観察しながら回転磁界により推進などを行う際の、操作性を向上することができる。
On the other hand, the
According to the present embodiment that operates in this way, even in a configuration in which image data is wirelessly transmitted from the
Further, since the
Also in the case of the present embodiment, since images aligned in a predetermined direction can be displayed by the rotation correction, it is possible to improve operability when performing propulsion or the like with a rotating magnetic field while observing.
本実施例においては、撮像のタイミングから所定時間to経過後に、圧縮された画像データを無線送信するようにしているが、圧縮により時間が変動する場合には、画像データに時間情報を付加することにより、圧縮後、直ちに送信するようにしても良い。
カプセル制御回路23は、撮像素子14による撮像のタイミングから圧縮処理が終了して送信を開始するまでの時間の情報(時間情報)を、画像の先頭部分に付加して送信するように制御する。
この場合、信号処理回路20は、圧縮処理が終了すると、カプセル制御回路23に終了信号を送り、カプセル制御回路23は、撮像のタイミングからこの終了信号を受け取ったまでの経過時間を算出してその経過時間の時間情報を無線回路22に送り、無線回路22は、この時間情報を付加して画像データの送信を開始する。
In the present embodiment, the compressed image data is wirelessly transmitted after a predetermined time to elapses from the imaging timing. However, when the time varies due to the compression, time information is added to the image data. Thus, it may be transmitted immediately after compression.
The
In this case, when the compression processing is completed, the
そして、体外の処理装置6Cでは、受信した画像の先頭部分に付加された時間情報を読み取り、磁界制御回路27に対して、回転角度情報出力要求の信号に、その時間情報を付加して送信する。
磁界制御回路27は、回転角度情報出力要求が入力されたタイミングからその時間情報の時間tだけさかのぼったタイミングでの回転角度情報を出力し、その回転角度情報は、回転角度取得回路31により保持される。
そして、画像取得回路26は、その回転角度情報を用いて圧縮された画像の解凍処理、画像回転処理等を行う構成にする。
Then, the
The magnetic
The
図14は、この第1変形例における動作のタイミングチャ−トを示す。
カプセル本体3Cは、カプセル制御回路23の制御下で、例えば一定の周期で照明素子15を発光させ、撮像素子14により撮像させる。その撮像のタイミングにおいてカプセル制御回路23は、タイマ23aを起動し、タイマ23aは時間の計測を開始する。
撮像素子14により撮像された撮像信号は、信号処理回路20によりA/D変換され、さらに画像データの圧縮が行われ、画像された画像データはメモリ21に格納される。
FIG. 14 shows an operation timing chart in the first modification.
Under the control of the
The image signal picked up by the
画像データの圧縮が終了して、無線回路22から送信を行う際に、信号処理回路20はカプセル制御回路23にデータ圧縮が終了したことを知らせ、カプセル制御回路23はタイマ23aにより、撮像の開始のタイミングからの時間tを求め、画像データの先頭に、この時間tの情報を付加して送信させる。
画像取得回路26は、画像データを受信した際の先頭部分に付加された時間tの情報を読み取り、磁界制御回路27に対してこの時間tだけさかのぼった時刻の回転角度情報を出力させるようにする。
そして、画像取得回路26は、送信される画像データの取り込みを終了すると、圧縮された画像データの解凍、回転角度情報を参照した画像回転処理等を行い、回転補正した画像を表示装置7で表示する。
一方、カプセル本体3C側では、カプセル制御回路23は、前の撮像から所定の時間経過すると、次の撮像を開始する。
When the image data compression is completed and transmission is performed from the
The
When the acquisition of the image data to be transmitted is completed, the
On the other hand, on the
このように動作する本変形例によれば、撮像タイミングの時間情報を付加して送信する必要があるが、主に画像データの圧縮のためにその圧縮処理の終了までの時間が変動するような場合にも、その終了時に、直ちに画像データを無線送信することができるメリットがある。
つまり、本変形例によれば、撮像した画像により画像圧縮の時間が変動した場合においても、確実に撮像のタイミングを検出でき、従って簡単な構成で画像を回転しない状態で精度良く表示できる。
次に第2変形例を説明する。実施例3においては、カプセル本体3C側は、画像データを無線送信した後、処理装置6C側が圧縮された画像データの解凍処理等を行っている最中においても、次の撮像動作を開始するようにしていたが、処理装置6C側が圧縮された画像データの解凍処理等を行った後に、次の撮像動作を開始するようにしても良い。
According to this modified example that operates in this way, it is necessary to add the time information of the imaging timing and transmit it. However, the time until the end of the compression process varies mainly due to compression of the image data. Even in this case, there is a merit that the image data can be wirelessly transmitted immediately at the end.
In other words, according to the present modification, even when the image compression time varies depending on the captured image, it is possible to reliably detect the imaging timing, and therefore it is possible to display the image accurately with a simple configuration without rotating.
Next, a second modification will be described. In the third embodiment, the
図15はこの場合の動作のタイミングチャートを示す。図15では、図13におけるカプセル本体3C内における撮像を行う撮像素子14、A/D変換して画像データの圧縮処理を行う信号処理回路20、メモリ21に格納された圧縮された画像データを無線で送信する無線回路22に分けてその動作内容を示している。
図15は、図13にも示したように、撮像のタイミングから所定時間to経過後に、カプセル本体3Cの無線回路22から画像データの無線送信を開始する。但し、図15では簡単化のため撮像のタイミングは撮像開始のタイミングで示している。
画像取得回路26は、無線で送信される画像データを受信した際の先頭部分において、回転角度情報出力要求の信号を磁界制御回路27を送り、この信号から所定時間toだけさかのぼった時刻の回転角度情報を出力させ、その回転角度情報を回転角度取得回路31が保持する。
FIG. 15 shows a timing chart of the operation in this case. In FIG. 15, the
In FIG. 15, as shown in FIG. 13, wireless transmission of image data is started from the
The
そして、さらに画像取得回路26は、圧縮された画像データの解凍、回転角度情報を参照しての画像回転処理等を行った後、表示装置7に出力して、回転補正がされた画像が表示装置7で表示されるようにする。
カプセル本体3C側では、表示装置7により画像の表示が行われるまでの所定時間が経過すると、次の撮像動作が開始することになる。
次に第3変形例を説明する。本変形例は、第2変形例を変更し、さらに実施例3の場合よりも短い時間間隔で撮像及び撮像された画像の回転補正を行って順次表示することができるようにしてものである。
本変形例は、画像取得回路26を無線回路25から画像データを取り込んでメモリなどに格納する画像データ格納部26aと、この画像データ格納部26aに格納された画像データに対して圧縮解凍処理、画像回転処理、補間処理を行う画像処理部26bとに分けている。
Further, the
On the
Next, a third modification will be described. In the present modification, the second modification is changed, and images can be picked up at shorter time intervals than in the case of the third embodiment, and rotation of the picked-up images can be corrected and sequentially displayed.
In this modification, the
そして、画像処理部26bが圧縮解凍処理を行っている場合にも、画像データ格納部26aが次の画像データを受信(格納)する動作を並行して行えるようにして、撮像のフレームレートを向上できるようにしている。なお、画像データ格納部26a及び画像処理部26bの符号は図16にて示している。
図16は、第3変形例の動作のタイミングチャートを示す。図16では、図15における画像取得回路26を、無線回路25から画像データを順次格納するメモリ等で構成される画像データ格納部26aと、この画像データ格納部26aに格納された画像データに対して圧縮解凍処理、画像回転処理、補間処理を行う画像処理部26bとに分けて示している。
図16の場合には、カプセル本体3C側は、撮像素子14での撮像が終了すると、引き続いて信号処理回路20は、その画像をA/D変換して画像データの圧縮の処理を開始し、その圧縮の処理が終了する。
Even when the image processing unit 26b performs compression / decompression processing, the image data storage unit 26a can perform the operation of receiving (storing) the next image data in parallel to improve the imaging frame rate. I can do it. The reference numerals of the image data storage unit 26a and the image processing unit 26b are shown in FIG.
FIG. 16 shows a timing chart of the operation of the third modified example. In FIG. 16, the
In the case of FIG. 16, on the
この場合、撮像のタイミングから所定時間ti経過すると、無線回路22から圧縮された画像データを無線で送信する動作を開始すると共に、(カプセル制御回路23の制御下で)撮像素子14は次の撮像動作を開始する。
画像データが無線送信されると、処理装置6Cの画像データ格納部26aは、受信した画像データの先頭部分において、回転角度情報出力要求の信号を磁界制御回路27を送り、この信号から所定時間toだけさかのぼった時刻の回転角度情報を出力させ、その回転角度情報を回転角度取得回路31が保持する。
画像データ格納部26aは、画像データを全て受信(格納)すると、回転角度取得回路31に対して保持している回転角度情報を画像処理部26bに送るように信号を送り、引き続いて画像処理部26bは、画像データ格納部26aに格納された画像データの圧縮解凍、回転角度情報を参照しての画像回転処理等を行い、回転補正した画像を表示装置7に出力して、表示装置7でその画像を表示させる。
In this case, when a predetermined time ti elapses from the imaging timing, an operation of wirelessly transmitting the compressed image data from the
When the image data is wirelessly transmitted, the image data storage unit 26a of the
When the image data storage unit 26a receives (stores) all the image data, the image data storage unit 26a sends a signal to the rotation
また上記カプセル本体3Cでは、次の撮像動作に引き続いて信号処理回路20でその画像をA/D変換して画像データの圧縮の処理を開始し、上記したように撮像のタイミングから所定時間ti経過すると、無線回路22から圧縮された画像データを無線で送信する動作を開始すると共に、(カプセル制御回路23の制御下で)撮像素子14は、さらに次の撮像動作を開始するようになる。
このように動作する本変形例によれば、実施例3の場合よりもさらに短い時間間隔で撮像及び撮像された画像に対して回転補正を行って、回転が停止された状態と等価な観察し易い画像を表示することができる。
また、このシステムは、撮像時間とカプセル本体3C内部での処理時間の合計が、カプセル本体3Cから画像取得回路26にデータを送信する時間よりも長い場合に、より適した動作を実施することができる。
In the
According to this modified example that operates in this way, the image is captured at a time interval that is even shorter than in the case of Example 3, and rotation correction is performed on the captured image, and an observation equivalent to the state in which the rotation is stopped is observed. Easy images can be displayed.
In addition, this system can perform a more suitable operation when the sum of the imaging time and the processing time in the
次に本発明の実施例4を図17を参照して説明する。図17は本発明の実施例4のカプセル型医療システム1Dの構成を示す。
本実施例のカプセル型医療システム1Dは、例えば図2に示す実施例1のカプセル型医療システム1において、カプセル本体3内にさらに発振器41及びこの発振器41の出力信号で周囲に交流磁界を発生するコイル42を設けたカプセル本体3Dにしている。
また、カプセル本体3Dの外部には、前記コイル42の交流磁界からカプセル本体3Dの長手方向の向き(方向)を検出すると共に、位置も検出する方向/位置検出装置43と、カプセル本体3Bに内蔵されているマグネット16の向き(方向)を検出する磁極センサ44及びこの磁極センサ44の出力からマグネットの向きを検出する(マグネット)方向検出装置45とを設けている。
Next, a fourth embodiment of the present invention will be described with reference to FIG. FIG. 17 shows a configuration of a capsule medical system 1D according to the fourth embodiment of the present invention.
In the capsule medical system 1D of the present embodiment, for example, in the capsule
Further, outside the capsule body 3D, a direction /
カプセル本体3D内には、図3(A)で示したカプセル本体3において、例えば外装容器11の後端付近の内部にコイル42が所定の向き、具体的にはコイル42がソレノイド状に巻回されたソレノイドの向きがカプセル本体3Dの長手方向の向きに設定された状態で収納されている。
上記方向/位置検出装置43は例えば交流磁界を検出する複数のセンスコイルを有し、各センスコイルで検出された信号からコイル42の向きや位置を検出する。また、磁極センサ44は、複数の磁極センサ44で構成され、複数の磁極センサの出力信号からマグネット16の磁極の向きを検出する。また、カプセル本体3D内に配置されるコイル42とマグネット16との配置状態により、カプセル本体3Dの長手方向における前側等の向きを検出することもできる。
なお、コイル42の代わりにアンテナを採用し、アンテナから放射される電波を方向/位置検出装置43で受信し、カプセル本体3Dの長手方向の向き及び位置を検出するようにしても良い。
In the capsule body 3D, in the
The direction /
Note that an antenna may be employed instead of the
これら方向/位置検出装置43及び方向検出装置45による検出された情報は、処理装置6Dの磁界制御回路27に入力される。
この処理装置6Dの構成は、図2の処理装置6と同じ構成であるが、磁界制御回路27の動作が一部異なる。
この磁界制御回路27は、操作入力装置8が操作された場合、記憶回路28に記憶された情報と、方向/位置検出装置43及び方向検出装置45により検出された情報により、回転磁界を発生したり、発生する回転磁界の向き等を適切な範囲内に収まるように制御する動作を行う。
具体的に説明すると、操作入力装置8が操作されて、例えば回転磁界の方向が変更される場合、磁界制御回路27は、方向/位置検出装置43及び方向検出装置45により検出された情報と、現在のカプセル本体3Dのマグネット16の方向及び回転磁界の方向から、現在のカプセル本体3Dの方向と回転磁界の方向が適切な範囲内に有るかを判定する。 そして、適切な範囲内の場合にはその操作入力に従って回転磁界の方向を変更し、適切な範囲から逸脱する場合には、その操作入力を時間的に抑制して(つまり、変化率を時間的に押さえることにより)適切な範囲内に収まるように抑制する。
Information detected by the direction /
The configuration of the
When the
More specifically, when the
このようにすることにより、操作入力装置8の操作入力に対して、回転磁界の方向や周波数変化等をカプセル本体3D側での応答を考慮して適切な範囲内に押さえることにより、カプセル本体3Dの回転による推進動作等を円滑に制御することができる。
なお、カプセル本体3Dを回転磁界によって回転させるため、慣性や摩擦等によって回転追従遅れが発生することも想定できる。特に回転速度が速い場合に、その遅れが大きくなることが予想できる。
この場合、この遅れ量を経験値又は計算値として求め、画像回転処理時に加味しても良い。この場合には、より精度良く回転補正ができ、観察し易い画像が得られることになる。
In this way, the capsule body 3D can be controlled by suppressing the direction of the rotating magnetic field, the frequency change, and the like within an appropriate range with respect to the operation input of the
In addition, since the capsule body 3D is rotated by the rotating magnetic field, it can be assumed that a rotation follow-up delay occurs due to inertia or friction. In particular, when the rotational speed is high, it can be expected that the delay will increase.
In this case, the amount of delay may be obtained as an empirical value or a calculated value and taken into account during the image rotation process. In this case, rotation correction can be performed with higher accuracy, and an image that can be easily observed can be obtained.
その他の作用効果は、実施例1の場合と同様である。
なお、本実施例は、図2の実施例1に適用した場合で説明したが、実施例1の変形例や実施例2或いは実施例3等に適用することもできることは明らかであり、その場合にも上述したように、操作入力装置8の操作入力を適切な範囲内に納めることにより、カプセル本体の推進動作等をより円滑に行えるようにできる。
Other functions and effects are the same as those in the first embodiment.
In addition, although the present Example was demonstrated by the case where it applied to Example 1 of FIG. 2, it is clear that it can be applied to the modification of Example 1, Example 2, or Example 3, etc., in that case In addition, as described above, by keeping the operation input of the
次に本発明の実施例5を図18及び図19を参照して説明する。図18は本発明の実施例5の医療システム1Eの構成を示す。上述した実施例においては、回転磁界により、カプセル本体3等の回転速度等を変更可能にしていたが、本実施例においては、以下に説明するように回転磁界を用いないで回転駆動手段により回転駆動する構成にしている。
図18に示すようにこの医療システム1Eは、カプセル形状部51をフレキシブルチューブ52の先端に設けた医療装置本体3Eと、この医療装置本体3Eを回転駆動するモータ53と、このモータ53の回転速度の変更等を行う操作入力装置54と、操作入力装置54からの操作入力に応じてモータ53の回転の制御及び医療装置本体3Eに内蔵された撮像素子14の撮像信号に対する信号処理を行う処理装置6Eと、撮像素子14により撮像された画像を表示する表示装置7とを備えている。
Next, a fifth embodiment of the present invention will be described with reference to FIGS. FIG. 18 shows a configuration of a
As shown in FIG. 18, this
図19(A)の側面図及び図19(B)の正面図に示す医療装置本体3Eは、図3に示したカプセル本体3と殆ど同じようにカプセル形状の外装容器11を有するカプセル形状部51の後端に、細長のフレキシブルチューブ52の先端を連結している。この場合、カプセル形状部51の中心軸Cに沿うように、フレキシブルチューブ52の先端が取り付けてある。
上述した実施例1から4まででは、医療装置本体としてカプセル本体3のみが体腔内に挿入されていたが、本実施例ではカプセル形状部51と、これに連結された可撓性の細長部材としてのフレキシブルチューブ52とが体腔内に挿入される挿入部を形成している。 この医療装置本体3Eの正面図は、図19(B)に示すように、図3(B)と殆ど同じ形状となる。但し、本実施例においては、回転磁界を利用しないで、モータ53により回転させる構造にしているので、このカプセル形状部51内には、マグネット16が設けてない。
A medical device
In Examples 1 to 4 described above, only the
また、本実施例においては、フレキシブルチューブ52の外周面には、カプセル形状部51の外周面に設けた螺旋状突起12と同じピッチの螺旋状突起55が設けてあり、両螺旋状突起12、55により螺旋状突起12のみの場合よりも大きな推力発生構造部として機能するようにしている。
このカプセル形状部51の内部には、図18に示すように照明素子、撮像素子14等が収納されている。このカプセル形状部51には、図2のカプセル本体3におけるマグネット16及び無線回路22を除いたものが内蔵されている。なお、電池24も内蔵しているが、外部の処理装置6Eから電源を供給する構成にしても良い。
また、カプセル形状部51に内蔵されたメモリ21及びカプセル制御回路23は、フレキシブルチューブ52内に挿通された信号線56の一端と接続され、その他端は、フレキシブルチューブ52の後端(基端)のコネクタ57の外周面に設けた接点と接続される。 このコネクタ57の接点は、モータ53の回転軸と接続され、この回転軸の外側には、コネクタ57をロータ側としたスリップリング58が形成されており、このスリップリング58の内周面に設けたステータ側接点に接続された信号線は、処理装置6Eの画像取得回路26と接続される。
Further, in this embodiment, the outer surface of the
Inside the capsule-shaped
The
この画像取得回路26は、実施例1の場合と同様にカプセル制御回路23に撮像要求の信号を送ると共に、撮像素子14により撮像され、信号処理回路20により信号処理された画像データが入力される。
実施例1においては、無線回路22等を経て無線で信号を送受信していたが、本実施例においては、信号線56を介して信号の送受信を行う。
また、この処理装置6Eは、図2における処理装置6において、磁界制御回路27の代わりにモータ53の回転速度を制御するモータ制御回路59が設けてあり、このモータ制御回路59は、操作入力装置54による操作入力に応じてモータ53の回転速度を変更する制御を行う。
なお、操作入力装置54は、実施例1の場合と同様に速度入力装置8bと、機能ボタン8cとが設けてあり、方向入力装置8aは有しない構成である。
The
In the first embodiment, signals are transmitted and received wirelessly via the
2 is provided with a
The
その他の構成は、実施例1と同様である。
実施例1においては、処理装置6は、撮像タイミングを検出した場合、磁界制御回路27により回転磁界の回転角度情報を取得して、カプセル本体3から取り込まれる画像データに対して、画像を回転せる画像回転処理を行って所定の回転角の方向の画像にする処理を行っていたが、本実施例においては、処理装置6Eは、撮像タイミングを検出した場合、モータ制御回路59によりモータ53の回転角度情報を取得して、カプセル形状部51から取り込まれる画像データに対して、画像を回転させる画像回転処理を行って所定の回転角の方向の画像にする処理を行う。
Other configurations are the same as those of the first embodiment.
In the first embodiment, when detecting the imaging timing, the
本実施例による回転補正の動作に関しては、実施例1における図7のタイミングチャートにおいて、磁界制御回路27をモータ制御回路59に読み替えた動作と殆ど一致する。 本実施例においても、実施例1の場合と同様にカプセル形状部51が回転駆動された場合においても、所定の方向の回転角の状態で画像を表示することができる。
図20は、変形例の医療システム1Fの構成を示す。この医療システム1Fは、図18の医療システム1Fにおいて、カプセル形状部51における信号処理回路20及びメモリ21を有しない構造のカプセル形状部51Bを採用した医療装置本体3Fにしている。 つまり、本変形例は、撮像素子14により撮像した画像を信号線56を介して画像取得回路26が取得する構成にしている。その他の構成は、図18の場合と同様である。
The rotation correction operation according to this embodiment is almost the same as the operation in which the magnetic
FIG. 20 shows a configuration of a modified medical system 1F. This medical system 1F is a medical device
本変形例によれば、実施例5の場合よりも低コストで、実施例5の場合と殆ど同様の作用効果が得られる。 According to this modification, the same effects as in the case of the fifth embodiment can be obtained at a lower cost than in the fifth embodiment.
なお、本変形例では、撮像要求の信号を画像取得回路26からカプセル制御回路23に送信する構成にしているが、カプセル形状部51が所定のタイミング等で撮像を行い、その際にカプセル制御回路23から画像取得回路26或いは撮像タイミング検出回路30に撮像タイミングを検出するための信号を送るようにしても良い。
なお、上述した実施例等を部分的に組み合わせる等して構成される実施例等も本発明に属する。
In this modification, the imaging request signal is transmitted from the
Note that embodiments configured by partially combining the above-described embodiments also belong to the present invention.
[付記]
(請求項1の効果)
撮像を行うタイミングを検出するタイミング検出装置を有し、タイミング検出装置の出力を受け前記医療装置用回転装置の回転角の情報を取得する回転角取得装置を設け、撮像した時の回転角の情報を取得する。これに基づき、前記撮像装置で撮像した画像を回転させる。これにより、画像の回転を正確に行うことできる。また、簡単な構成で、撮像装置の回転を意識させない画像を得ることができる。
(請求項2の効果)
撮像を行うタイミングを検出するタイミング検出装置を有し、このタイミング検出装置の出力を受けて前記磁界発生装置で発生した回転磁界の回転角の情報を取得する回転角取得装置を設け、撮像した時の回転角の情報を取得する。これに基づき、前記撮像装置で撮像した画像を所定の回転角となるように回転させる。これにより、画像の回転を正確に行うことできる。また、簡単な構成で、撮像装置の回転を意識させない画像を得ることができる。
[Appendix]
(Effect of Claim 1)
A rotation angle acquisition device that has a timing detection device that detects the timing of performing imaging, receives the output of the timing detection device and acquires the rotation angle information of the medical device rotation device, and provides information on the rotation angle at the time of imaging To get. Based on this, the image picked up by the image pickup device is rotated. As a result, the image can be accurately rotated. In addition, an image that is not conscious of rotation of the imaging device can be obtained with a simple configuration.
(Effect of claim 2)
When having a timing detection device that detects the timing of performing imaging and providing a rotation angle acquisition device that receives the output of the timing detection device and acquires information on the rotation angle of the rotating magnetic field generated by the magnetic field generation device. Get information about the rotation angle of. Based on this, the image picked up by the image pickup device is rotated so as to have a predetermined rotation angle. As a result, the image can be accurately rotated. In addition, an image that is not conscious of rotation of the imaging device can be obtained with a simple configuration.
(請求項3の効果)
体外に配置された装置側から医療装置本体側に撮像要求をする医療システムにおいて、請求項1と同様の効果を得ることができる。
(請求項4の効果)
医療装置本体側の撮像コントロールにより画像データが画像取得装置に送られてくる医療システムにおいても請求項1と同様の効果を得ることができる。
1.前記医療装置本体が、体内無線通信装置を有するカプセル内視鏡であり、前記画像取得装置が体外無線通信装置を有し、前記体内無線通信装置と前記体外無線装置間で無線通信することを特徴とする請求項2の医療システム。
(請求項5の効果)
請求項1〜4の医療システムにおいて、医療装置本体の回転を意識させない表示を実現することができる。
(Effect of claim 3)
An effect similar to that of the first aspect can be obtained in a medical system in which an imaging request is made from the device side arranged outside the body to the medical device body side.
(Effect of claim 4)
The same effect as that of the first aspect can be obtained also in a medical system in which image data is sent to the image acquisition device by imaging control on the medical device main body side.
1. The medical device main body is a capsule endoscope having an in-vivo wireless communication device, the image acquisition device has an extracorporeal wireless communication device, and wirelessly communicates between the in-vivo wireless communication device and the extracorporeal wireless device. The medical system according to claim 2.
(Effect of Claim 5)
The medical system of Claims 1-4 WHEREIN: The display which is not made aware of rotation of a medical device main body is realizable.
(付記1の効果)
請求項2と同様の効果をカプセル内視鏡においても得ることができる。
(Effects of Appendix 1)
An effect similar to that of the second aspect can also be obtained in the capsule endoscope.
2.前記画像取得装置が、前記撮像装置に撮像要求信号を送信すると共に、前記撮像タイミング検出装置へ撮像タイミング信号を送信し、前記撮像タイミング検出装置は、前記回転角取得装置に回転角取得要求信号を送信し、前記撮像装置が撮像要求信号を受け撮像を行い、前記回転角取得装置が回転角取得要求信号を受け回転角の情報を取得することで、前記撮像装置が撮像を行ったときの前記回転磁界の回転角の情報を取得することを特徴とする請求項2、付記1の医療システム。
(付記2の効果)
体外に配置された装置側から医療装置本体側に撮像要求をする医療システムにおいて、請求項2,付記1と同様の効果を得ることができる。
3.前記回転角取得装置が、回転角取得要求信号を受けてから、前記撮像要求信号発生から前記撮像装置が撮像を行うまでの遅れ時間だけ後の前記回転磁界の回転角の情報を取得することを特徴とする付記2の医療システム。
(付記3の効果)
体外に配置された装置側から医療装置本体側に撮像要求をする医療システムにおいて、通信速度が遅く遅延時間が発生するようなシステムにおいても付記2と同様の効果を得ることができる。
特に医療装置本体がカプセル内視鏡を構成している場合において有効に作用する。
2. The image acquisition device transmits an imaging request signal to the imaging device and transmits an imaging timing signal to the imaging timing detection device, and the imaging timing detection device sends a rotation angle acquisition request signal to the rotation angle acquisition device. The imaging device receives the imaging request signal and performs imaging, and the rotation angle acquisition device receives the rotation angle acquisition request signal and acquires information on the rotation angle, whereby the imaging device performs imaging. The medical system according to claim 2, wherein the information on the rotation angle of the rotating magnetic field is acquired.
(Effects of Appendix 2)
In a medical system that requests imaging from the device side arranged outside the body to the medical device main body side, the same effect as in claim 2 and
3. The rotation angle acquisition device acquires information on the rotation angle of the rotating magnetic field after receiving a rotation angle acquisition request signal and after a delay time from when the imaging request signal is generated until the imaging device performs imaging. Supplementary note 2 medical system characterized.
(Effects of Appendix 3)
In a medical system in which an imaging request is made from the device side arranged outside the body to the medical device main body side, the same effect as in Appendix 2 can be obtained even in a system in which the communication speed is slow and the delay time is generated.
This is particularly effective when the medical device body constitutes a capsule endoscope.
4.前記撮像装置で撮像された画像データを圧縮処理を行うデータ圧縮装置を前記医療装置本体に設け、前記データ圧縮装置で圧縮された圧縮データを前記画像取得装置に送信し、前記圧縮データを解凍処理するデータ解凍装置を体外に設けたことを特徴とする付記2、付記3の医療システム。
(付記4の効果)
画像により圧縮処理時間・データ送信時間が異なってしまう、データを圧縮する装置を有する場合においても付記2、付記3と同様の効果を得ることができる。
5.前記医療装置本体に、撮像タイミングコントローラを有し、
前記撮像装置は前記撮像タイミングコントローラの信号を受け、撮像を行うと共に、
前記画像取得装置に画像データを送信し、前記撮像タイミング検出装置は、前記画像データの送信開始を検出することを特徴とする請求項2、付記1の医療システム。
(付記5の効果)
医療装置本体側の撮像コントロールにより画像データが画像取得装置に送られてくる医療システムにおいても、付記1、付記2と同様の効果を得ることができる。
4). A data compression device that compresses image data captured by the imaging device is provided in the medical device body, the compressed data compressed by the data compression device is transmitted to the image acquisition device, and the compressed data is decompressed The medical system according to appendix 2 or
(Effects of Appendix 4)
The same effects as those of Supplementary Note 2 and
5. The medical device body has an imaging timing controller,
The imaging device receives a signal from the imaging timing controller and performs imaging,
The medical system according to claim 2, wherein the image acquisition device transmits image data, and the imaging timing detection device detects the start of transmission of the image data.
(Effects of Appendix 5)
In the medical system in which image data is sent to the image acquisition device by the imaging control on the medical device main body side, the same effects as those of
6.過去の前記回転磁界の回転角を記憶する記憶装置を有し、
前記回転角取得装置が、前記撮像タイミング検出装置が撮像タイミング信号を受信してから、前記撮像装置が撮像を行ってから前記画像取得装置に画像データを送信するまでの時間分早い前記回転磁界の回転角を前記記憶装置から取得することを特徴とする付記5の医療システム。
(付記6の効果)
医療装置本体側で画像を取得してから、体外に配置されたタイミング検出装置に撮像タイミング信号が遅延して届く医療システムにおいても、付記5と同様の効果を得ることができる。特に医療装置本体がカプセル内視鏡で、無線通信により画像データを送信するような通信に遅延時間が発生するような医療システムにおいても付記5と同様の効果を得ることができる。
6). A storage device for storing the rotation angle of the rotating magnetic field in the past;
The rotation angle acquisition device receives the imaging timing signal from the imaging timing detection device, and the rotational magnetic field that is earlier by the time from when the imaging device performs imaging until the image data is transmitted to the image acquisition device. The medical system according to appendix 5, wherein the rotation angle is acquired from the storage device.
(Effects of Appendix 6)
Even in a medical system in which an imaging timing signal arrives at a timing detection device arranged outside the body after an image is acquired on the medical device main body side, the same effect as in Appendix 5 can be obtained. In particular, the same effect as in Supplementary Note 5 can be obtained even in a medical system in which the medical device body is a capsule endoscope and a delay time occurs in communication in which image data is transmitted by wireless communication.
7.前記磁界制御装置に接続された操作者が操作する磁界操作手段を有し、前記磁界操作手段を操作することで、前記医療装置本体を体腔内で任意の方向に位置誘導制御することを特徴とする請求項2、付記1から付記6のいずれかに記載の医療システム。
(付記7の効果)
請求項2、付記1〜付記6の効果に加え、操作者が磁界発生装置を操作して医療装置本体の向き、位置を制御できるので効率の良い観察を行うことができる。
7). It has magnetic field operation means operated by an operator connected to the magnetic field control device, and by operating the magnetic field operation means, position control of the medical device body in an arbitrary direction within a body cavity is characterized. The medical system according to any one of
(Effects of Appendix 7)
In addition to the effects of Claim 2 and
8.前記医療装置本体が、体内無線通信装置を有するカプセル内視鏡であり、前記画像取得装置が体外無線通信装置を有し、前記体内無線通信装置と前記体外無線装置間で無線通信することを特徴とする請求項1の医療システム。
(付記8の効果)
請求項1と同様の効果をカプセル内視鏡においても得ることができる。
9.前記回転角取得装置が、回転角取得要求信号を受けてから、前記撮像要求信号発生から前記撮像装置が撮像を行うまでの遅れ時間だけ後の前記医療装置用回転装置の回転角の情報することを特徴とする請求項3の医療システム。
(付記9の効果)
体外に配置された装置側から医療装置側に撮像要求をする医療システムにおいて、通信速度が遅く遅延時間が発生するようなシステムにおいても付記3と同様の効果を得ることができる。特に医療装置がカプセル内視鏡を構成している場合において有効に作用する。10.前記撮像装置で撮像された画像データを圧縮処理を行うデータ圧縮装置を前記医療装置本体に設け、前記データ圧縮装置で圧縮された圧縮データを前記画像取得装置に送信し、前記圧縮データを解凍処理するデータ解凍装置を体外に設けたことを特徴とする請求項3、付記12の医療装置システム。
(付記10の効果)
画像により圧縮処理時間・データ送信時間が異なってしまう、データを圧縮する装置を有する場合においても請求項3、付記9と同様の効果を得ることができる。
8). The medical device main body is a capsule endoscope having an in-vivo wireless communication device, the image acquisition device has an extracorporeal wireless communication device, and wirelessly communicates between the in-vivo wireless communication device and the extracorporeal wireless device. The medical system according to
(Effects of Appendix 8)
The effect similar to that of the first aspect can also be obtained in the capsule endoscope.
9. Information about the rotation angle of the rotation device for the medical device after the rotation angle acquisition device receives a rotation angle acquisition request signal and is delayed by a delay time from when the imaging request signal is generated until the imaging device performs imaging. The medical system according to
(Effects of Appendix 9)
In a medical system in which an imaging request is made from the device side arranged outside the body to the medical device side, the same effect as in
(Effects of Appendix 10)
The same effects as those of
11.過去の前記医療装置用回転装置の回転角を記憶する記憶装置を有し、
前記回転角取得装置が、前記撮像タイミング検出装置が撮像タイミング信号を受信してから、前記撮像装置が撮像を行ってから前記画像取得装置に画像データを送信するまでの時間分早い前記医療装置用回転装置の回転角を前記記憶装置から取得することを特徴とする請求項4の医療システム。
(付記11の効果)
医療装置側で画像を取得してから、体外に配置されたタイミング検出装置に撮像タイミング信号が遅延して届くシステムにおいても、請求項4と同様の効果を得ることができる。
特に、医療装置がカプセル内視鏡で、無線通信により画像データを送信するような通信に遅延時間が発生するようなシステムにおいても付記8と同様の効果を得ることができる。
12.前記医療装置本体は、医療装置用回転装置を構成するモータにより回転される。
11. A storage device for storing a rotation angle of the past rotation device for the medical device;
For the medical device, the rotation angle acquisition device is earlier by the time from when the imaging timing detection device receives an imaging timing signal until the imaging device performs imaging until image data is transmitted to the image acquisition device. The medical system according to
(Effects of Appendix 11)
An effect similar to that of the fourth aspect can be obtained in a system in which an imaging timing signal arrives at a timing detection device disposed outside the body after an image is acquired on the medical device side.
In particular, even in a system in which the medical device is a capsule endoscope and a delay time occurs in communication such as transmission of image data by wireless communication, the same effect as in
12 The medical device body is rotated by a motor constituting a medical device rotating device.
13.前記撮像タイミングコントローラは、送信する前記画像データに撮像タイミングの情報を付加することを特徴とする請求項4の医療システム。
(付記13の効果)
撮像タイミングの情報を付加するので、送信する周期を一定にしなくても、確実に撮像タイミングを検出でき、精度の良い回転補正ができ、観察し易い画像を得ることができる。
14.前記医療装置用回転装置の回転角の情報を時間と関連付けて記憶する記憶装置を有することを特徴とする請求項1の医療システム。
(付記14の効果)
撮像タイミングを検出した時刻が実際の撮像タイミングよりも後の場合においても、精度良く撮像タイミングにおける回転角の情報を取得できる。
13. The medical system according to
(Effects of Supplementary Note 13)
Since the information of the imaging timing is added, the imaging timing can be reliably detected without causing the transmission cycle to be constant, accurate rotation correction can be performed, and an easily observable image can be obtained.
14 The medical system according to
(Effects of Appendix 14)
Even when the time at which the imaging timing is detected is later than the actual imaging timing, information on the rotation angle at the imaging timing can be acquired with high accuracy.
医療装置本体を体腔内で効率良く推進させるための回転運動に伴って、撮像される画像の向きも変化してしまうことを、撮像のタイミングを検出し、そのタイミングにおける回転角の情報を用いて画像の回転補正を行うことにより、所定方向に揃った画像を表示でき、観察や誘導がし易くなる。 By detecting the timing of imaging and using the information of the rotation angle at that timing, the orientation of the image to be captured also changes with the rotational movement for efficiently propelling the medical device body within the body cavity. By performing image rotation correction, images aligned in a predetermined direction can be displayed, and observation and guidance are facilitated.
1…カプセル型医療システム
3…カプセル本体
4…回転磁界発生装置
5…磁界発生制御装置
6…処理装置
7…表示装置
8…操作入力装置
8a…方向入力装置
8b…速度入力装置
8c…機能ボタン
9…磁界発生装置
11…外装容器
11a…先端カバー
12…螺旋状突起
14…撮像素子
15…照明素子
16…マグネット
20…信号処理回路
22、25…無線回路
26…画像取得回路
27…磁界制御回路
28…記憶回路
29…設定回路
30…撮像タイミング検出回路
31…回転角度取得回路
33…交流電流発生&制御部
34…ドライバ部
35a〜35c…電磁石
代理人 弁理士 伊藤 進
DESCRIPTION OF
Claims (12)
前記医療装置を挿入軸周りに回転させる医療装置用回転装置と、
前記医療装置に設けられた撮像装置と、
前記撮像装置が撮像を行った撮像タイミングに関連する信号を検出する撮像タイミング検出装置と、
前記撮像タイミング検出装置の出力を受け前記撮像タイミングにおける前記医療装置用回転装置の回転角を取得する回転角取得装置と、
前記回転角取得装置で取得した回転角の情報に基づき、前記撮像装置で撮像した画像を回転させる処理を行う画像取得装置と、
を具備し、
前記医療装置は、撮像タイミングコントローラを有し、
前記撮像装置は、前記撮像タイミングコントローラの信号を受け、撮像を行うと共に、前記画像取得装置に画像データを送信し、
前記撮像タイミング検出装置は、前記画像データの送信開始を検出する
ことを特徴とする医療システム。 A medical device inserted into a body cavity;
A rotating device for a medical device that rotates the medical device around an insertion axis;
An imaging device provided in the medical device;
An imaging timing detection device that detects a signal related to an imaging timing at which the imaging device has performed imaging;
A rotation angle acquisition device that receives an output of the imaging timing detection device and acquires a rotation angle of the medical device rotation device at the imaging timing;
An image acquisition device that performs a process of rotating an image captured by the imaging device based on information on the rotation angle acquired by the rotation angle acquisition device;
Comprising
The medical device has an imaging timing controller;
The imaging device receives a signal of the imaging timing controller, performs imaging, and transmits image data to the image acquisition device,
The imaging timing detection device detects the start of transmission of the image data.
A medical system characterized by that .
前記画像取得装置は、前記圧縮データを伸長処理するデータ伸長装置を有することを特徴とする請求項1に記載の医療システム。 The medical device has a data compression device that compresses the image, and transmits the compressed data compressed by the data compression device to the image acquisition device,
The medical system according to claim 1, wherein the image acquisition device includes a data decompression device that decompresses the compressed data .
前記回転角取得装置が前記過去の回転角を参照することを特徴とする請求項1に記載の医療システム。 The medical device rotating device has a storage device for storing past rotation angles;
The medical system according to claim 1, wherein the rotation angle acquisition device refers to the past rotation angle .
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004344650A JP4727975B2 (en) | 2004-11-29 | 2004-11-29 | Medical system |
| PCT/JP2005/022126 WO2006057443A1 (en) | 2004-11-26 | 2005-11-25 | Medical system |
| EP05811669A EP1824374A1 (en) | 2004-11-26 | 2005-11-25 | Medical system |
| CN2005800386468A CN101056576B (en) | 2004-11-26 | 2005-11-25 | Medical system |
| US11/663,124 US8038600B2 (en) | 2004-11-26 | 2005-11-25 | Medical system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004344650A JP4727975B2 (en) | 2004-11-29 | 2004-11-29 | Medical system |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2006149668A JP2006149668A (en) | 2006-06-15 |
| JP2006149668A5 JP2006149668A5 (en) | 2007-11-01 |
| JP4727975B2 true JP4727975B2 (en) | 2011-07-20 |
Family
ID=36628642
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004344650A Expired - Fee Related JP4727975B2 (en) | 2004-11-26 | 2004-11-29 | Medical system |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4727975B2 (en) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2062523A4 (en) * | 2006-09-14 | 2015-08-12 | Olympus Medical Systems Corp | MEDICAL GUIDING SYSTEM AND METHOD FOR CONTROLLING THE MEDICAL DEVICE |
| JP5484651B2 (en) * | 2006-11-13 | 2014-05-07 | オリンパスメディカルシステムズ株式会社 | Medical device position detection system and medical device guidance system |
| JP4961475B2 (en) * | 2007-06-20 | 2012-06-27 | オリンパスメディカルシステムズ株式会社 | Endoscope system |
| JP4908356B2 (en) | 2007-09-11 | 2012-04-04 | オリンパスメディカルシステムズ株式会社 | Capsule guidance system |
| JP5541844B2 (en) * | 2008-03-28 | 2014-07-09 | オリンパスメディカルシステムズ株式会社 | Endoscope system |
| WO2010044330A1 (en) * | 2008-10-16 | 2010-04-22 | オリンパスメディカルシステムズ株式会社 | Medical device |
| JP4902620B2 (en) * | 2008-10-21 | 2012-03-21 | オリンパスメディカルシステムズ株式会社 | Capsule guidance system |
| CN110248584B (en) * | 2017-02-01 | 2022-02-18 | 富士胶片株式会社 | Endoscope system and method for operating same |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004255174A (en) * | 2003-02-04 | 2004-09-16 | Olympus Corp | Medical device guiding system |
-
2004
- 2004-11-29 JP JP2004344650A patent/JP4727975B2/en not_active Expired - Fee Related
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004255174A (en) * | 2003-02-04 | 2004-09-16 | Olympus Corp | Medical device guiding system |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006149668A (en) | 2006-06-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8038600B2 (en) | Medical system | |
| JP4961475B2 (en) | Endoscope system | |
| US7711408B2 (en) | Medical device guidance system | |
| JP4091004B2 (en) | Medical device guidance system | |
| JP5226538B2 (en) | Operating device, monitoring device, and capsule guiding system | |
| JP5101513B2 (en) | Medical guidance system | |
| JP6049951B2 (en) | Capsule endoscope system | |
| CN101056576B (en) | Medical system | |
| EP2351513B1 (en) | Capsule medical device guidance system | |
| JP4914847B2 (en) | Medical device guidance system and method for controlling medical device guidance system | |
| US9931022B2 (en) | Capsule medical device guidance system | |
| JP4727975B2 (en) | Medical system | |
| JP4153845B2 (en) | Medical device guidance system | |
| US10779712B2 (en) | Capsule medical device guidance system | |
| JP6022112B2 (en) | Capsule-type endoscope guidance system, guidance device, and method of operating guidance device | |
| JP4504394B2 (en) | Medical device guidance system | |
| JP4505292B2 (en) | Intra-subject introduction system | |
| WO2016157596A1 (en) | Capsule endoscope guidance system and capsule endoscope guidance apparatus | |
| WO2012172952A1 (en) | Biological information acquiring system | |
| JP2007260423A (en) | Medical device and medical device guiding system | |
| JP2008080149A (en) | Medical device guide system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070918 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070918 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100907 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101108 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110405 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110414 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140422 Year of fee payment: 3 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |