JP4678476B2 - Electric motor control device - Google Patents
Electric motor control device Download PDFInfo
- Publication number
- JP4678476B2 JP4678476B2 JP2004091604A JP2004091604A JP4678476B2 JP 4678476 B2 JP4678476 B2 JP 4678476B2 JP 2004091604 A JP2004091604 A JP 2004091604A JP 2004091604 A JP2004091604 A JP 2004091604A JP 4678476 B2 JP4678476 B2 JP 4678476B2
- Authority
- JP
- Japan
- Prior art keywords
- motor
- motors
- control
- electric motor
- electric
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000006243 chemical reaction Methods 0.000 claims description 56
- 230000001360 synchronised effect Effects 0.000 claims description 11
- 238000001514 detection method Methods 0.000 claims description 4
- 238000000034 method Methods 0.000 description 12
- 230000003247 decreasing effect Effects 0.000 description 6
- 238000004364 calculation method Methods 0.000 description 5
- 238000010586 diagram Methods 0.000 description 5
- 230000003111 delayed effect Effects 0.000 description 3
- 238000002474 experimental method Methods 0.000 description 2
- 238000004088 simulation Methods 0.000 description 2
- 238000004422 calculation algorithm Methods 0.000 description 1
Images



Landscapes
- Control Of Multiple Motors (AREA)
Description
本発明は、特性及び負荷の一方又は双方が異なる複数の電動機の同期制御を行う制御装置であって、特に、制御のための演算処理を簡略化することが可能な電動機の制御装置に関する。 The present invention relates to a control device that performs synchronous control of a plurality of motors having different characteristics and / or loads, and particularly relates to a motor control device that can simplify arithmetic processing for control.
従来、コンバーチブル車の幌やルーフパネル等に利用できる車両用開閉体の制御装置に関して、2個の同一特性及び同一負荷の電動機を左右に配置し、これらの2個の電動機の速度を同期させるように制御する制御装置が知られている。この制御装置は、2個の電動機の速度を同期制御するために、電動機の回転に同期したパルス信号を発生する回転センサを備え、この回転センサからの信号により2個の電動機の現在位置と現在速度を算出する。そして、2個の電動機の現在位置の平均位置と予め定めた電動機の目標速度とから単位時間後の目標位置を算出するとともに、前記2個の電動機の現在位置と現在速度とから単位時間後の各電動機の予測位置を算出する。次に、前記単位時間後の目標位置と各電動機の予測位置とを比較して単位時間後の各電動機の制御位置を算出し、それに合せて各電動機の速度制御を行う(例えば、特許文献1参照)。 Conventionally, regarding a control device for a vehicle opening / closing body that can be used for a hood or a roof panel of a convertible vehicle, two electric motors having the same characteristics and the same load are arranged on the left and right sides, and the speeds of these two electric motors are synchronized. There is known a control device that performs control. This control device includes a rotation sensor that generates a pulse signal synchronized with the rotation of the motors in order to synchronously control the speeds of the two motors, and the current position and current position of the two motors are determined by signals from the rotation sensors. Calculate the speed. Then, a target position after a unit time is calculated from the average position of the current positions of the two motors and a predetermined target speed of the motors, and a unit time after the current positions and the current speeds of the two motors. Calculate the predicted position of each motor. Next, the target position after the unit time and the predicted position of each motor are compared to calculate the control position of each motor after the unit time, and the speed control of each motor is performed accordingly (for example, Patent Document 1). reference).
しかし、このような従来の制御装置では、特性及び負荷が同一の複数の電動機を同期制御するのには適しているが、特性及び負荷の一方又は双方が異なる複数の電動機の同期制御を行う場合には、予測位置の演算や速度制御等のためにそれぞれの電動機に応じて異なる演算処理を行う必要があるため、電動機の数に比例して制御装置の演算負担が大きくなる。したがって、特性及び負荷の一方又は双方が異なる多数の電動機の同期制御を行う場合には、高機能な演算処理装置を用いることが求められることになり、コストアップの要因になるという問題がある。 However, in such a conventional control device, it is suitable for synchronous control of a plurality of motors having the same characteristics and load. However, when synchronous control of a plurality of motors having different characteristics or loads is performed. Since it is necessary to perform different arithmetic processing depending on each electric motor for the calculation of the predicted position, speed control, etc., the calculation burden of the control device increases in proportion to the number of electric motors. Therefore, when performing synchronous control of a large number of motors having different characteristics and / or loads, it is required to use a high-performance arithmetic processing unit, which causes a problem of cost increase.
また、通常は、電動機がハンチングを起こすことを防止するために、目標位置の前後に一定の許容範囲を設け、その許容範囲内に電動機の位置が制御されれば、それ以上の細かな速度制御を行わず、その許容範囲内に電動機の位置を維持するように制御が行われる。しかしながら、特性及び負荷の一方又は双方が異なる複数の電動機においてこのような制御を行った場合、制御の状態が安定してくると、その状態での動作速度がその電動機の上限の動作速度に対してどれだけ余裕があるかにより、余裕がある電動機は進み側で安定し、余裕がない電動機は遅れ側で安定することになるので、最終的には、最も進んだ電動機と最も遅れた電動機との間で、前記許容範囲内での位置の差ができる場合がある。また、そのような電動機の位置の差により動作の停止時期にも差が生じざるを得ないが、全ての電動機を同時に停止させることはできないとしても、電動機による駆動対象側の要求により、電動機を所定の順序で停止させるように制御することが必要な場合もある。これらの場合には、前記許容範囲内での各電動機の位置差やそのような位置の差に基づく停止順序を調整する制御が必要になる。 Normally, in order to prevent the motor from causing hunting, a certain allowable range is provided before and after the target position, and if the position of the motor is controlled within the allowable range, finer speed control is performed. The control is performed so as to maintain the position of the electric motor within the allowable range. However, when such control is performed in a plurality of electric motors having different characteristics and / or loads, when the control state becomes stable, the operation speed in that state is higher than the upper limit operation speed of the motor. Depending on how much room is available, a motor with a margin will be stable on the leading side, and a motor with no margin will be stable on the lagging side. There may be a difference in position within the allowable range. In addition, there is a difference in operation stop timing due to such a difference in the position of the motor, but even if not all the motors can be stopped at the same time, the motor can It may be necessary to control to stop in a predetermined order. In these cases, it is necessary to perform control for adjusting the position difference of each motor within the allowable range and the stop order based on such position difference.
本発明は、上記の課題に鑑みてなされたものであり、その目的は、特性及び負荷の一方又は双方が異なる複数の電動機の同期制御を行うのに際して、制御のための演算処理を簡略化し、装置のコストダウンを図ることを可能とするとともに、各電動機の特性や負荷或いは電動機に対する動作要求に基づいて、制御の許容範囲内での進みや遅れの程度を調整する制御を可能とする電動機の制御装置を提供する点にある。 The present invention has been made in view of the above problems, and its purpose is to simplify arithmetic processing for control when performing synchronous control of a plurality of motors having different characteristics and / or loads. It is possible to reduce the cost of the apparatus, and to control the motor to adjust the degree of advance or delay within the allowable range of control based on the characteristics and load of each motor or the operation request for the motor. The control device is provided.
上記目的を達成するための本発明に係る電動機の制御装置の第1特徴構成は、各電動機の実動作量を検知してそれを実動作量情報として出力する検知部と、前記複数の電動機の任意の時点におけるそれぞれの理論動作量に乗算することにより、それらの乗算した結果が互いに一致するような値をとる変換係数を、各電動機の前記実動作量情報に対してそれぞれ乗じ、統一した尺度である基準動作量情報にそれぞれ変換して出力する変換部と、各電動機の前記基準動作量情報に基づいて、前記複数の電動機の任意の時点における基準動作量が一定の許容範囲内に収まるように各電動機の動作制御を行う制御部と、前記各変換係数に対して、前記制御部における許容範囲内での各電動機の基準動作量の進み又は遅れの程度を調整する調整係数を乗じる調整部と、を備える点にある。 The first characteristic feature of the motor control apparatus according to the present invention for achieving the above object, a detection unit for outputting it as actual operation amount information by detecting the actual operation amount of the electric motor, the plurality of electric motors By multiplying the theoretical operation amount at an arbitrary point in time, the actual operation amount information of each motor is multiplied by a conversion coefficient that takes a value such that the multiplication results coincide with each other. Based on the reference operation amount information of each electric motor, the reference operation amount at any time of the plurality of electric motors is within a certain allowable range based on the conversion unit that converts the reference operation amount information to output and the reference operation amount information of each electric motor. And a control unit that controls the operation of each motor, and an adjustment coefficient that adjusts the degree of advance or delay of the reference operation amount of each motor within the allowable range in the control unit. And that the adjustment unit, in that it comprises a.
この第1特徴構成によれば、特性及び負荷の一方又は双方が異なる複数の電動機の動作制御を、基準動作量という統一した尺度に基づいて行うので、特性及び負荷が同一の複数の電動機の動作制御を行うのと同様の演算処理とすることができ、制御のための演算処理の簡略化、及び装置のコストダウンを図ることができる。また、電動機がハンチングを起こすことを防止するために、制御部が制御対象である各電動機の動作量を一定の許容範囲内に収めるような制御を行う場合において、この許容範囲内で生じる各電動機の進み又は遅れを適切に調整することができる。 According to this first feature configuration, the operation control of a plurality of motors having one or both of different characteristics and loads is performed based on a unified scale called the reference operation amount, so that the operations of a plurality of motors having the same characteristics and loads are performed. The calculation process can be the same as that for the control, and the calculation process for the control can be simplified and the cost of the apparatus can be reduced. In addition, in order to prevent the motor from causing hunting, when the control unit performs control such that the operation amount of each motor to be controlled falls within a certain allowable range, each motor generated within the allowable range Can be adjusted appropriately.
本発明に係る電動機の制御装置の第2特徴構成は、前記変換係数が、前記複数の電動機の各理論動作量の比に基づいて各電動機毎に定めた定数である点にある。 A second characteristic configuration of the motor control device according to the present invention is that the conversion coefficient is a constant determined for each motor based on a ratio of theoretical operation amounts of the plurality of motors.
この第2特徴構成によれば、変換部で用いる変換係数を、装置の設計段階で予め定めておくことができる。 According to the second feature configuration, the conversion coefficient used in the conversion unit can be determined in advance at the design stage of the apparatus.
本発明に係る電動機の制御装置の第3特徴構成は、前記調整係数が、前記複数の電動機のそれぞれについて、その電動機の理論上の動作速度と上限の動作速度との差及び動作停止を遅らせる要求の高さの一方又は双方に基づいて値を設定する点にある。 According to a third characteristic configuration of the motor control device according to the present invention, the adjustment coefficient is a request for delaying a difference between a theoretical operation speed and an upper limit operation speed of each of the plurality of motors and an operation stop. The value is set based on one or both of the heights.
この第3特徴構成によれば、電動機がハンチングを起こすことを防止するために、制御部が制御対象である各電動機の動作量を一定の許容範囲内に収めるような制御を行う場合において、この許容範囲内で生じる各電動機の進み又は遅れを、各電動機の動作停止を遅らせる要求の高さに基づいて調整し、複数の電動機のうちの動作停止を遅らせたい電動機を後に停止させ、或いは少なくとも他の電動機と同時に停止させる制御が可能となる。また、前記許容範囲内で生じる各電動機の進み又は遅れを、各電動機の特性に応じて、各電動機の理論上の動作速度と上限の動作速度との差に基づいて調整し、各電動機の進み又は遅れの差を少なくすることが可能となる。 According to the third feature configuration, in order to prevent the electric motor from causing hunting, when the control unit performs control such that the operation amount of each electric motor to be controlled falls within a certain allowable range, The advance or delay of each motor that occurs within the allowable range is adjusted based on the height of the request to delay the operation stop of each motor, and the motor that is desired to delay the operation stop among the plurality of motors is stopped later, or at least others It is possible to perform control to stop simultaneously with the motor. Further, the advance or delay of each motor that occurs within the allowable range is adjusted based on the difference between the theoretical operation speed of each motor and the upper limit operation speed according to the characteristics of each motor, and the advance of each motor. Alternatively, the difference in delay can be reduced.
本発明に係る電動機の制御装置の第4特徴構成は、動作中の電動機の動作停止又は停止中の電動機の動作開始がない間を一の制御領域とし、各制御領域毎に動作中の複数の電動機を対象として動作制御を行う点にある。 The fourth characteristic configuration of the motor control device according to the present invention is that a period of time during which the operation of the operating motor is not stopped or the operation of the stopped motor is not started is defined as one control region, and a plurality of operating units are operated for each control region. The point is that the operation is controlled for the electric motor.
この第4特徴構成によれば、複数の電動機の中に動作開始時期及び動作停止時期が異なるものがある場合であっても、動作中の複数の電動機を対象として、上記の第1から第3の特徴構成による場合と同様の簡易な処理による同期制御を行うことができる。 According to the fourth feature configuration, even when there are some of the plurality of electric motors having different operation start timing and operation stop timing, the above-described first to third are intended for the plurality of operating motors. The synchronous control can be performed by the same simple process as in the case of the feature configuration.
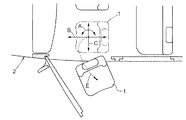
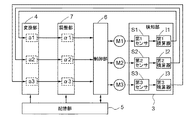
以下に、本発明に係る電動機の制御装置を、座席1を車外側へ振出し又は車内側へ格納することが可能な福祉車両2における座席1の駆動用電動機の同期制御に適用した場合の実施形態について図面に基づいて説明する。図1は、本実施形態に係る福祉車両2の座席1の移動の態様を示す模式図であり、図2は、本実施形態に係る電動機の制御装置の機能ブロック図である。
Hereinafter, an embodiment in which the motor control device according to the present invention is applied to synchronous control of a drive motor for a
図1に示すように、本実施形態に係る福祉車両2の座席1は、回転方向A、前後スライド方向B、内外スライド方向Cの3方向に同時に動作することにより、ドアや車体等に当ることのない適切な軌跡Eを通って車外側へ振出し又は車内側へ格納することができるようになっている。このように座席1を上記3方向のそれぞれについて適切な速度で同時に移動させるため、本実施形態においては、図2に示すように、3方向のそれぞれの動作用に第1電動機M1、第2電動機M2及び第3電動機M3の3個の電動機を設けている。すなわち、第1電動機M1は回転方向A、第2電動機M2は前後スライド方向B、第3電動機M3は内外スライド方向Cの座席1の動作をそれぞれ担当し、図示しないアーム等を介して座席1を動作させる。
As shown in FIG. 1, the
第1電動機M1、第2電動機M2及び第3電動機M3は、座席1の振出し又は格納の際における動作の始端から終端までに要する動作量がそれぞれ異なり、その間の動作速度や荷重もそれぞれに異なる。すなわち、これら第1電動機M1、第2電動機M2及び第3電動機M3は、それぞれに負荷が異なっており、それに応じてそれぞれに特性が異なる電動機が用いられている。
The first electric motor M1, the second electric motor M2, and the third electric motor M3 have different operation amounts from the start to the end of the operation when the
また、図2に示すように、上記の第1電動機M1、第2電動機M2及び第3電動機M3には、動作量(ここでは回転量)に応じてパルス信号を出力する第1センサS1、第2センサS2及び第3センサS3と、これらの第1センサS1、第2センサS2及び第3センサS3から出力されたパルス信号の数を積算して実パルス数を演算し、それを実パルス数情報として出力する第1積算器I1、第2積算器I2及び第3積算器I3とがそれぞれ設けられている。この「実パルス数」は各電動機M1〜M3の動作開始から現時点までの実際の動作量を表しており、本発明における「実動作量」に相当する。よって、「実パルス数情報」は本発明における「実動作量情報」に相当する。本実施形態においては、これらの第1センサS1、第2センサS2及び第3センサS3と、第1積算器I1、第2積算器I2及び第3積算器I3とにより検知部3が構成されている。以下では、座席1の振出し又は格納の際における動作の始端から終端までの各電動機M1〜M3の全動作量すなわち全パルス数が、第1電動機M1は250パルス、第2電動機M2は500パルス、第3電動機M3は1000パルスである場合を例として説明する。ここでは、説明を簡単にするため、各電動機M1〜M3の上記全パルス数を比較的単純なパルス数とし、各電動機M1〜M3同士の全動作量の比も1:2:4と単純なものになるようにしている。
Further, as shown in FIG. 2, the first electric motor M1, the second electric motor M2, and the third electric motor M3 have a first sensor S1 that outputs a pulse signal in accordance with an operation amount (here, an amount of rotation), and a first sensor S1. The number of pulse signals output from the two sensors S2 and the third sensor S3 and the first sensor S1, the second sensor S2, and the third sensor S3 are integrated to calculate the actual number of pulses, and the actual number of pulses is calculated. A first integrator I1, a second integrator I2, and a third integrator I3 that output information are provided. This “actual pulse number” represents the actual operation amount from the start of operation of each of the motors M1 to M3 to the present time, and corresponds to the “actual operation amount” in the present invention. Therefore, “actual pulse number information” corresponds to “actual operation amount information” in the present invention. In the present embodiment, the first sensor S1, the second sensor S2, the third sensor S3, the first integrator I1, the second integrator I2, and the third integrator I3 constitute the
第1積算器I1、第2積算器I2及び第3積算器I3から出力される実パルス数情報は、変換部4に入力される。そして、変換部4では、各電動機M1〜M3の実パルス数情報に対して、第1電動機M1、第2電動機M2及び第3電動機M3の任意の時点における理論パルス数を一致させるように変換する変換係数a1、a2及びa3をそれぞれ乗じ、各電動機M1〜M3の基準パルス数情報に変換して出力する。この「基準パルス数情報」は本発明における「基準動作量情報」に相当する。ここで、「理論パルス数」とは、各電動機M1〜M3が設計通りの理想的な動作を行った場合における第1電動機M1、第2電動機M2及び第3電動機M3のそれぞれの各時点のパルス数のことであり、この理論パルス数が本発明における「理論動作量」に相当する。そして、変換係数a1、a2、及びa3は、第1電動機M1、第2電動機M2及び第3電動機M3の任意の時点におけるそれぞれの理論パルス数に乗算することにより、それらの乗算した結果が互いに一致するような値をとる係数である。したがって、本実施形態においては、この変換係数a1〜a3は、制御対象の各電動機M1〜M3の理論パルス数(理論動作量)の比に基づいて定めた定数となる。すなわち、第1電動機M1、第2電動機M2及び第3電動機M3の全パルス数の比が1:2:4であり、全ての電動機M1〜M3が設計通りの理想的な動作を行った場合には動作中の任意の時点においても各電動機M1〜M3のパルス数の比は変わらないので、理論パルス数の比は各電動機M1〜M3の動作中の全ての時点で1:2:4となる。よって、変換係数a1、a2、及びa3の比を、各電動機M1〜M3の理論パルス数の比1:2:4の逆比4:2:1とすれば、各電動機M1〜M3の任意の時点におけるそれぞれの理論パルス数に変換係数a1、a2、及びa3を乗算した結果が互いに一致することになる。したがって、ここでは、変換係数はa1=4、a2=2、a3=1とする。これらの変換係数a1〜a3は記憶部5に格納されており、変換部4における変換処理の際に読み出される。
The actual pulse number information output from the first integrator I1, the second integrator I2, and the third integrator I3 is input to the
この変換部4における各電動機M1〜M3の実パルス数情報から基準パルス数情報への変換の処理を、図3を用いて具体的に説明する。図3は、第1電動機M1、第2電動機M2及び第3電動機M3のそれぞれの実パルス数を表す軸であるM1軸、M2軸、M3軸の3つの軸を横軸(x軸)とし、第1電動機M1、第2電動機M2及び第3電動機M3の基準パルス数を表す軸を縦軸(y軸)として、各電動機M1〜M3の実パルス数情報を変換係数a1、a2及びa3により基準パルス数情報に変換する際の変換関数を表すグラフである。この図に示すように、各電動機M1〜M3の実パルス数をx、各電動機M1〜M3の基準パルス数をyとすると、各電動機M1〜M3の変換関数はそれぞれ「y=a1x」、「y=a2x」、「y=a3x」となる。ここで、変換係数は、a1=4、a2=2、a3=1であるので、変換部4における基準パルス数情報への変換関数は、具体的には、第1電動機M1については「y=4x」、第2電動機M2については「y=2x」、第3電動機M3については「y=x」となる。例えば、ある時点における第1電動機M1の実パルス数が「155」、第2電動機M2の実パルス数が「300」、第3電動機M3の実パルス数が「580」のとき、変換部4における変換後の各電動機M1〜M3の基準パルス数は、それぞれ第1電動機M1が「620」、第2電動機M2が「600」、第3電動機M3が「580」となる。ここで、全ての電動機M1〜M3が設計通りの理想的な動作を行った場合、すなわち各電動機M1〜M3の実パルス数が理論パルス数と等しい場合には、全ての電動機M1〜M3の基準パルス数が一致することから、各電動機M1〜M3の基準パルス数の差異が制御の誤差と考えることができる。したがって、このように各電動機M1〜M3の実パルス数情報を基準パルス数情報に変換することにより、制御部6においては、統一された尺度である基準パルス数の比較のみによって容易に制御の誤差としての基準パルス数の進み又は遅れを検知することが可能となる。
The conversion process from the actual pulse number information of each of the motors M1 to M3 in the
本実施形態においては、制御部6は、各電動機M1〜M3の基準パルス数情報を比較し、基準パルス数が進んでいる電動機の速度を低減し、基準パルス数が遅れている電動機の速度を増加させる制御を行う。この際に、基準パルス数の進み又は遅れがわずかな場合にまで電動機の速度を変更する制御を行うと電動機がハンチングを起こす場合があるため、図4に示すように、各電動機M1〜M3の基準パルス数の進み又は遅れについて一定の許容範囲Rを設け、その許容範囲R内に各電動機M1〜M3の位置が制御されれば、それ以上の細かな速度制御を行わず、その許容範囲R内に各電動機M1〜M3の位置を維持するような制御が行われる。したがって、各電動機M1〜M3は、許容範囲R内で基準パルス数の進み又は遅れが生じ得ることになる。
In the present embodiment, the
調整部7は、このような制御部6における許容範囲R内での各電動機M1〜M3の基準パルス数の進み又は遅れの程度を調整する調整係数α1、α2及びα3を、変換部4における各電動機M1〜M3の変換係数a1、a2及びa3に対して乗じる処理を行う。本実施形態においては、図2に示すように、変換部4で変換後の基準パルス数情報が調整部7に入力されるので、調整部7では、入力された各電動機M1〜M3の基準パルス数情報に対して調整係数α1、α2及びα3をそれぞれ乗じることにより、各電動機M1〜M3の調整後の基準パルス数情報(以下単に「調整後の基準パルス数情報」とする。)を制御部6に対して出力する。これにより、変換係数a1、a2及びa3に対して調整係数α1、α2及びα3を乗じる処理を行ったことになる。なお、調整部7の機能的構成は、図2に示すものに限定されることはなく、結果的に変換係数a1、a2及びa3に対して調整係数α1、α2及びα3を乗じて調整することとなればよいので、例えば、変換部4による変換前の実パルス数情報に対して先に調整係数α1、α2及びα3を乗じ、その結果に対して変換部4において変換係数a1、a2及びa3を乗じる構成や、変換部4の中に調整部7を設け、変換係数a1、a2及びa3に調整係数α1、α2及びα3を予め乗じた係数により実パルス数情報を変換する構成とすることも可能である。
The
この調整部7における各電動機M1〜M3の基準パルス数の進み又は遅れの程度の調整の処理を、図5を用いて具体的に説明する。図5は、第1電動機M1、第2電動機M2及び第3電動機M3のそれぞれの実パルス数を表す軸であるM1軸、M2軸、M3軸の3つの軸を横軸(x軸)とし、第1電動機M1、第2電動機M2及び第3電動機M3の基準パルス数を表す軸を縦軸(y軸)として、各電動機M1〜M3の実パルス数情報を変換係数a1、a2及びa3並びに調整係数α1、α2及びα3を用いて調整後の基準パルス数情報に変換する際の変換関数を表すグラフである。この図に示すように、各電動機M1〜M3の実パルス数をx、各電動機M1〜M3の調整後の基準パルス数をyとすると、各電動機M1〜M3の変換関数は、それぞれ「y=α1・a1x」、「y=α2・a2x」、「y=α3・a3x」となる。調整係数α1、α2及びα3の値の設定方法については後で詳しく説明するが、本実施形態においては、α1=1.05、α2=1.02、α3=1としており、また、上記のとおり、変換係数は、a1=4、a2=2、a3=1であるので、調整後の基準パルス数情報への変換関数は、具体的には、図5において実線で示されるように、第1電動機M1については「y=4.2x」、第2電動機M2については「y=2.04x」、第3電動機M3については「y=x」となり、第1電動機M1及び第2電動機M2についてみれば、図5において2点鎖線で示される変換部4のみによる基準パルス数情報への変換関数(図3参照)に対して傾きが変化したものとなる。例えば、ある時点における第1電動機M1の実パルス数が「155」、第2電動機M2の実パルス数が「300」のとき、調整後の基準パルス数は、それぞれ第1電動機M1が「651」、第2電動機M2が「612」となり、図3に示すような変換部4のみによる変換後の基準パルス数と比較して、第1電動機M1では基準パルス数が「31」、第2電動機M2では基準パルス数が「12」大きい(進んだ)値に変換される。このように調整後の基準パルス数が調整前の基準パルス数に対して大きい値となるように調整された電動機は、制御部6においては、その調整前と調整後との基準パルス数の差の分だけ実際の状態よりも進んでいるものと判断されるため、その調整前と調整後との基準パルス数の差に応じて他の電動機に対して遅れ側に制御されることになる。したがって、調整係数α1、α2及びα3の値が大きいほど、その調整係数α1、α2及びα3が用いられる電動機は遅れ側に制御されるように調整される。なお、調整係数α1、α2及びα3は、1以下の値とすることも可能である。その場合には、調整後の基準パルス数が調整前の基準パルス数に対して小さい値となるように調整され、制御部6においては、その調整前と調整後との基準パルス数の差の分だけ実際の状態よりも遅れているものと判断されるため、各電動機M1〜M3は、その調整前と調整後との基準パルス数の差に応じて他の電動機に対して進み側に制御されることになる。その場合、調整係数α1、α2及びα3の値が小さいほど、その調整係数α1、α2及びα3が用いられる電動機は進み側に制御されるように調整される。
The adjustment processing of the degree of advance or delay of the reference pulse number of each of the motors M1 to M3 in the
次に、調整部7の調整係数α1、α2及びα3の値の設定方法について説明する。調整係数α1、α2及びα3は、複数の電動機M1〜M3のそれぞれについて、各電動機M1〜M3の理論上の動作速度と上限の動作速度との差及び動作停止を遅らせる要求の高さの一方又は双方に基づいて値を設定すると好適である。
Next, a method for setting the values of the adjustment coefficients α1, α2, and α3 of the
まず、「各電動機M1〜M3の理論上の動作速度と上限の動作速度との差」について説明する。本実施形態においては、各電動機M1〜M3の速度v1〜v3の制御は、PWM(Pulse Width Modulation:パルス幅変調)制御により行うので、各電動機M1〜M3の速度v1〜v3の増加又は減少の制御はデューティー比の増加又は減少により行う。このような制御において、動作中のデューティー比が100%に近く実際の動作速度と上限の動作速度との差が小さい電動機は、動作速度の上限に近い速度で動作しているために余裕がなく許容範囲R内で他の電動機に対して遅れがちになる場合が多いのに対して、動作中のデューティー比が低く実際の動作速度と上限の動作速度との差が大きい電動機は、動作速度の上限に対して余裕のある速度で動作していることになるので許容範囲R内で他の電動機に対して進みがちになる場合が多い。ここで、各時点における実際の動作速度を検知して上限の動作速度との差を演算すると演算処理の負担が大きくなるため、実際の動作速度に代えて、各電動機M1〜M3が設計通りの理想的な動作を行った場合における速度である理論上の動作速度を用いることとする。そして、各電動機M1〜M3の理論上の動作速度と上限の動作速度との差が大きい電動機ほど速度に余裕があり進み側で安定するものと推測し、その電動機の調整係数を他の電動機の調整係数に対して大きい値に設定する。これにより、進みがちな電動機の基準パルス数が制御部6において実際よりも進んでいるものと判断されるようにすることができ、進みがちな電動機が遅れ側に速度制御されるように調整することができる。
First, “the difference between the theoretical operating speed of each of the motors M1 to M3 and the upper operating speed” will be described. In the present embodiment, the speeds v1 to v3 of the electric motors M1 to M3 are controlled by PWM (Pulse Width Modulation) control, so that the speeds v1 to v3 of the electric motors M1 to M3 are increased or decreased. Control is performed by increasing or decreasing the duty ratio. In such control, an electric motor whose duty ratio during operation is close to 100% and the difference between the actual operation speed and the upper limit operation speed is small has no margin because it operates at a speed close to the upper limit of the operation speed. In many cases, the motor tends to lag behind other motors within the permissible range R, whereas a motor with a low duty ratio during operation and a large difference between the actual operation speed and the upper limit operation speed is Since it is operating at a speed with a margin with respect to the upper limit, the motor tends to advance with respect to another motor within the allowable range R. Here, if the actual operation speed at each time point is detected and the difference from the upper limit operation speed is calculated, the burden of calculation processing increases. Therefore, instead of the actual operation speed, each of the motors M1 to M3 is as designed. The theoretical operating speed, which is the speed when an ideal operation is performed, is used. Then, it is estimated that the motor having a larger difference between the theoretical operating speed and the upper limit operating speed of each of the motors M1 to M3 has a margin in speed and is stable on the advance side, and the adjustment coefficient of the motor is set to be different from that of the other motors. Set a large value for the adjustment factor. Thereby, it is possible to determine that the reference pulse number of the motor that tends to advance is more advanced than the actual in the
次に、「動作停止を遅らせる要求の高さ」について説明する。上記のとおり、各電動機M1〜M3は、許容範囲R内で基準パルス数の進み又は遅れが生じ得るが、そのような許容範囲R内で生じる進み又は遅れに対して、各電動機M1〜M3による駆動対象側からの要求により、電動機を所定の順序で停止させるように制御することが必要な場合がある。すなわち、本実施形態においては、各電動機M1〜M3は福祉車両2の座席1の回転方向A、前後スライド方向B、内外スライド方向Cの動作をそれぞれ担当するところ、座席1がドアや車体等に当ることなく移動可能な軌跡Eに制約があることや、座席1に座っている人に対して不自然な感じを与えないように動作させる必要があること等により、許容範囲R内での進み又は遅れにより生じる各電動機の停止順序を所定の順序にする必要が生じる場合がある。そこで、このような各電動機M1〜M3の停止順序に対する要求を、各電動機M1〜M3についての動作停止を遅らせる要求の高さとして表し、この動作停止を遅らせる要求の高さが高い電動機ほど、その電動機の調整係数を他の電動機の調整係数に対して大きい値に設定する。これにより、動作停止を遅らせる要求の高い電動機の基準パルス数が制御部6において実際よりも進んでいるものと判断されるようにすることができ、その電動機が遅れ側に速度制御されるように調整することができる。なお、各電動機M1〜M3の停止順序に対する要求を、各電動機M1〜M3についての動作停止を早める要求の高さとして表し、この動作停止を早める要求の高さが高い電動機ほど、その電動機の調整係数を他の電動機の調整係数に対して小さい値に設定することも可能である。
Next, “the height of the request for delaying the operation stop” will be described. As described above, each of the electric motors M1 to M3 may cause the advance or delay of the reference pulse number within the allowable range R. However, with respect to the advance or delay that occurs within the allowable range R, each of the electric motors M1 to M3 It may be necessary to control the electric motor to stop in a predetermined order according to a request from the drive target side. That is, in the present embodiment, each of the electric motors M1 to M3 is responsible for the operations of the rotation direction A, the front / rear sliding direction B, and the inner / outer sliding direction C of the
このような調整部7の調整係数α1、α2及びα3の値は、各電動機M1〜M3の基準パルス数の進み又は遅れの差や各電動機M1〜M3の動作停止の順序等が適切になるように実験やシミュレーション等に基づいて予め定めておくとよい。この際、調整係数α1、α2及びα3は、各電動機M1〜M3の任意の時点における理論パルス数に変換係数a1、a2及びa3並びに調整係数α1、α2及びα3をそれぞれ乗じた結果が、制御部6における許容範囲R内に収まる値の範囲内となるように設定すると好適である。このように設定すれば、許容範囲R内での各電動機M1〜M3の基準パルス数の進み又は遅れの調整に十分な調整幅を有し、なおかつ、調整部7による調整前の実際の基準パルス数の差が最大でも許容範囲Rの2倍までとなるので、過剰な調整により各電動機M1〜M3の基準パルス数の進み又は遅れの程度を大きくすることを防止できる。このような調整係数α1、α2及びα3は記憶部5に格納されており、調整部7における調整処理の際に読み出される。
The values of the adjustment coefficients α1, α2, and α3 of the
そして、制御部6では、各電動機M1〜M3の調整後の基準パルス数情報に基づいて、全ての電動機M1〜M3の任意の時点における調整後の基準パルス数が一定の許容範囲R内に収まるように各電動機M1〜M3の動作制御が行われる。すなわち、制御部6は、各電動機M1〜M3の調整後の基準パルス数情報を比較し、調整後の基準パルス数が一定の許容範囲Rを超えて進んでいる電動機の速度を低減し、調整後の基準パルス数が一定の許容範囲Rを超えて遅れている電動機の速度を増加させる制御を行う。ここで、許容範囲Rは、各電動機M1〜M3がハンチングを起こさないような範囲とし、実験やシミュレーション等に基づいて予め定めておくことができる。このような制御部6における制御のアルゴリズムや許容範囲R等は、記憶部5に記憶されている。
And in the
図4は、本実施形態における制御部6による各電動機M1〜M3の動作制御の方法を示す説明図である。この図に示すように、本実施形態においては、制御部6は、まず各電動機M1〜M3の現在の調整後の基準パルス数の平均値Aveを演算する。例えば、既に説明した図5に示すように、各電動機M1〜M3の現在の調整後の基準パルス数が、それぞれ第1電動機M1が「651」、第2電動機M2が「612」、第3電動機M3が「580」である場合、これらの平均値Aveは「Ave=614.333・・・」となる。そこで、次に、この平均値Aveを中心とするその前後の一定の許容範囲R内に各電動機M1〜M3の現在の調整後の基準パルス数が入っているか否かを判断する。本実施形態においては、例として、許容範囲Rを、平均値Aveを中心とする前後にそれぞれ「35」の範囲としている。そして、この平均値Aveを中心とする一定の許容範囲Rを超えて調整後の基準パルス数が進んでいる(大きい)電動機がある場合にはその電動機の速度を減少させ、この平均値Aveを中心とする一定の許容範囲Rを超えて調整後の基準パルス数が遅れている(小さい)電動機がある場合にはその電動機の速度を増加させる制御を行う。図4の例では、第2電動機M2及び第3電動機M3の調整後の基準パルス数は平均値Aveを中心とする許容範囲R内に入っていることから、第2電動機M2の速度v2及び第3電動機M3の速度v3の制御は行わず、そのままの速度v2、v3が維持されるが、第1電動機M1の調整後の基準パルス数は「650」であって平均値Aveを中心とする許容範囲Rを超えて進んでいることから、第1電動機M1の速度v1を減少させる制御が行われる。この際、第1電動機M1の調整前の基準パルス数は「620」であり、調整部7による調整がなければ速度v1はそのまま維持されるはずであったものが、調整部7による調整の結果、第1電動機M1の速度v1を減少させる制御が行われることになったのであり、これにより第1電動機M1は遅れ側に制御されるように調整されていることがわかる。
FIG. 4 is an explanatory diagram illustrating a method for controlling the operation of each of the motors M1 to M3 by the
各電動機M1〜M3の速度v1〜v3の増加又は減少の制御は、上記のとおりデューティー比の増加又は減少により行う。そして、このデューティー比の増加又は減少の方法としては、例えば、数十ms程度の短時間毎にデューティー比を数%ずつ増加又は減少させることにより行うことが可能である。これにより、各電動機M1〜M3の速度v1〜v3は平均値Aveの演算の度に増加又は減少し、各電動機M1〜M3の基準パルス数が平均値Aveを中心とする許容範囲R内に入るように速度制御されるので、急激に速度を変化させることなく、全ての電動機M1〜M3の調整後の基準パルス数が平均値Aveを中心とする許容範囲R内に入るように制御することができる。また、例えば、各電動機M1〜M3の調整後の基準パルス数の平均値Aveとの差に比例する大きさでデューティー比を増加又は減少させることにより、速度v1〜v3の増加又は減少の制御を行うことも可能である。なお、各電動機M1〜M3の動作開始時の初期デューティー比は、記憶部5に記憶されている。 The increase or decrease of the speeds v1 to v3 of the electric motors M1 to M3 is controlled by increasing or decreasing the duty ratio as described above. As a method of increasing or decreasing the duty ratio, for example, it is possible to increase or decrease the duty ratio by several percent every short time of about several tens of ms. As a result, the speeds v1 to v3 of the electric motors M1 to M3 increase or decrease every time the average value Ave is calculated, and the reference pulse number of the electric motors M1 to M3 falls within the allowable range R centered on the average value Ave. Thus, the speed can be controlled so that the number of reference pulses after adjustment of all the motors M1 to M3 falls within the allowable range R centered on the average value Ave without changing the speed rapidly. it can. Further, for example, by increasing or decreasing the duty ratio by a magnitude proportional to the difference from the average value Ave of the adjusted reference pulse number of each of the motors M1 to M3, the increase or decrease of the speeds v1 to v3 can be controlled. It is also possible to do this. The initial duty ratio at the start of operation of each of the motors M1 to M3 is stored in the storage unit 5.
上記実施形態においては、第1電動機M1、第2電動機M2及び第3電動機M3が、同時に動作を開始し、同時に停止する場合について説明したが、実際の電動機の制御装置では、複数の電動機の中に動作の開始時期及び停止時期が異なるものがあり、一部の電動機が遅れて動作を開始し、或いは先に動作を停止するような制御も行う場合がある。そのような制御を行う場合には、動作中の電動機の動作停止又は停止中の電動機の動作開始がない間を一の制御領域とし、各制御領域毎に動作中の複数の電動機を対象として動作制御を行う。このようにすることにより、複数の電動機の中に動作開始時期及び動作停止時期が異なるものがある場合であっても、動作中の複数の電動機のみを対象とすることとなり、上記実施形態と全く同様の構成の制御装置により、制御を行うことが可能となる。 In the above embodiment, the case where the first electric motor M1, the second electric motor M2, and the third electric motor M3 start and stop at the same time has been described. However, in an actual electric motor control device, there are a plurality of electric motors. In some cases, the start time and stop time of the operation are different, and some motors may start to operate with a delay, or may be controlled to stop the operation first. When such control is performed, the operation of the operating motor is stopped or the operation of the stopped motor is not started as one control area, and the operation is performed for a plurality of operating motors for each control area. Take control. By doing so, even if there are those in which the operation start timing and the operation stop timing are different among the plurality of electric motors, only the plurality of electric motors in operation are targeted, which is completely different from the above embodiment. Control can be performed by a control device having a similar configuration.
本発明は、例えば、複数方向への駆動を各方向に対応する電動機により行う場合等のように、特性及び負荷の一方又は双方が異なる複数の電動機の同期制御を行うための制御装置に好適に用いることができる。 The present invention is suitable for a control device for performing synchronous control of a plurality of electric motors having different characteristics and / or loads, such as when driving in a plurality of directions by electric motors corresponding to the respective directions. Can be used.
3 検知部
4 変換部
6 制御部
7 調整部
R 許容範囲
M1 第1電動機
M2 第2電動機
M3 第3電動機
S1、S2、S3 センサ
I1、I2、I3 積算器
a1、a2、a3 変換係数
α1、α2、α3 調整係数
DESCRIPTION OF
Claims (4)
各電動機の実動作量を検知してそれを実動作量情報として出力する検知部と、
前記複数の電動機の任意の時点におけるそれぞれの理論動作量に乗算することにより、それらの乗算した結果が互いに一致するような値をとる変換係数を、各電動機の前記実動作量情報に対してそれぞれ乗じ、統一した尺度である基準動作量情報にそれぞれ変換して出力する変換部と、
各電動機の前記基準動作量情報に基づいて、前記複数の電動機の任意の時点における基準動作量が一定の許容範囲内に収まるように各電動機の動作制御を行う制御部と、
前記各変換係数に対して、前記制御部における許容範囲内での各電動機の基準動作量の進み又は遅れの程度を調整する調整係数を乗じる調整部と、
を備える電動機の制御装置。 A control device that performs synchronous control of a plurality of electric motors having different one or both of characteristics and loads,
A detection unit that detects the actual operation amount of each motor and outputs it as actual operation amount information;
By multiplying each theoretical operation amount at an arbitrary point in time of the plurality of electric motors, conversion coefficients that take values such that the multiplied results coincide with each other are respectively obtained for the actual operation amount information of each electric motor. A conversion unit that multiplies and converts the reference movement amount information, which is a unified scale, and outputs the information ,
Based on the reference operation amount information of each motor, a control unit that performs operation control of each motor so that a reference operation amount at an arbitrary time of the plurality of motors is within a certain allowable range;
An adjustment unit that multiplies each conversion coefficient by an adjustment coefficient that adjusts the degree of advance or delay of the reference operation amount of each motor within an allowable range in the control unit;
An electric motor control device.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004091604A JP4678476B2 (en) | 2004-03-26 | 2004-03-26 | Electric motor control device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004091604A JP4678476B2 (en) | 2004-03-26 | 2004-03-26 | Electric motor control device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005278363A JP2005278363A (en) | 2005-10-06 |
| JP4678476B2 true JP4678476B2 (en) | 2011-04-27 |
Family
ID=35177436
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004091604A Expired - Fee Related JP4678476B2 (en) | 2004-03-26 | 2004-03-26 | Electric motor control device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4678476B2 (en) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5418827B2 (en) | 2009-08-21 | 2014-02-19 | アイシン精機株式会社 | Seat control mechanism |
| JP5471434B2 (en) * | 2009-12-28 | 2014-04-16 | アイシン精機株式会社 | Motor control device |
| JP2019146454A (en) * | 2018-02-23 | 2019-08-29 | 日本電産株式会社 | Motor device, air blower, and server device |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5496724A (en) * | 1978-01-17 | 1979-07-31 | Toshiba Corp | Synchronous control system of motor at follow-up side to motor at reference side |
| JPH05204422A (en) * | 1991-06-06 | 1993-08-13 | Honda Motor Co Ltd | Servo motor control system |
| JPH05333909A (en) * | 1992-05-28 | 1993-12-17 | Yokogawa Electric Corp | Robot controller |
| JPH08234819A (en) * | 1995-03-01 | 1996-09-13 | Fanuc Ltd | Numerical controller |
| JPH11305839A (en) * | 1998-04-21 | 1999-11-05 | Fanuc Ltd | Method for controlling plural servo motors |
| JPH11341885A (en) * | 1998-05-25 | 1999-12-10 | Matsushita Electric Ind Co Ltd | Motor controller |
| JP2000099119A (en) * | 1998-09-25 | 2000-04-07 | Sodick Co Ltd | Correcting method for ball screw pitch error |
-
2004
- 2004-03-26 JP JP2004091604A patent/JP4678476B2/en not_active Expired - Fee Related
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5496724A (en) * | 1978-01-17 | 1979-07-31 | Toshiba Corp | Synchronous control system of motor at follow-up side to motor at reference side |
| JPH05204422A (en) * | 1991-06-06 | 1993-08-13 | Honda Motor Co Ltd | Servo motor control system |
| JPH05333909A (en) * | 1992-05-28 | 1993-12-17 | Yokogawa Electric Corp | Robot controller |
| JPH08234819A (en) * | 1995-03-01 | 1996-09-13 | Fanuc Ltd | Numerical controller |
| JPH11305839A (en) * | 1998-04-21 | 1999-11-05 | Fanuc Ltd | Method for controlling plural servo motors |
| JPH11341885A (en) * | 1998-05-25 | 1999-12-10 | Matsushita Electric Ind Co Ltd | Motor controller |
| JP2000099119A (en) * | 1998-09-25 | 2000-04-07 | Sodick Co Ltd | Correcting method for ball screw pitch error |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005278363A (en) | 2005-10-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1798615B1 (en) | Fixed-position stop control apparatus for rotation shaft | |
| EP2287038B1 (en) | Motor control device and seat control device for vehicle | |
| US10787065B2 (en) | Vehicular opening/closing body control device and motor control device | |
| JP4678476B2 (en) | Electric motor control device | |
| WO2016125438A1 (en) | Vehicle-mounted electric motor control device | |
| JP7005972B2 (en) | Vehicle open / close control device | |
| JP4326881B2 (en) | Control device for electric power steering device | |
| JP4586960B2 (en) | Electric motor control device | |
| JP5348460B2 (en) | State memory controller | |
| JP4678475B2 (en) | Electric motor control device | |
| JP2007288925A (en) | Motor controlling device | |
| CN116733335A (en) | Auxiliary device for opening and closing vehicle door | |
| JP2020147950A (en) | Vehicle opening/closing body control device | |
| JP2019013923A (en) | Servo motor control device | |
| JP3875674B2 (en) | Control method of proportional integral controller | |
| CN112477624A (en) | Control method and control device for speed loop of driving motor and electric automobile | |
| JP3352612B2 (en) | Position control servo device and servo control method for position control system | |
| JP2002213143A (en) | Opening and closing controlling method for automatic door | |
| JP2008072851A (en) | Motor control device | |
| JP2006018431A (en) | Servo control device | |
| JP2003131704A (en) | Motor control unit equipped with overshoot control function | |
| JP2017166252A (en) | Vehicle door opening and closing device | |
| EP4242055A1 (en) | Seat control method, seat controller, and product | |
| JPH04298490A (en) | Method of forming speed reference signal in motor for crane | |
| JPH11103593A (en) | Speed limiter |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070222 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100506 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100513 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100701 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110106 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110119 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4678476 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140210 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |