JP4593341B2 - Navigation system, control method thereof, and control program - Google Patents
Navigation system, control method thereof, and control program Download PDFInfo
- Publication number
- JP4593341B2 JP4593341B2 JP2005098697A JP2005098697A JP4593341B2 JP 4593341 B2 JP4593341 B2 JP 4593341B2 JP 2005098697 A JP2005098697 A JP 2005098697A JP 2005098697 A JP2005098697 A JP 2005098697A JP 4593341 B2 JP4593341 B2 JP 4593341B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle speed
- value
- acceleration
- cumulative value
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





Landscapes
- Traffic Control Systems (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
- Navigation (AREA)
Description
本発明は、ナビゲーションの技術において、加速度センサから得る加速度値の累積値と、GPSによる位置データの変化量から求める車速との対照データの利用により、GPS衛星電波の不十分な場合でも、車両ECUとの配線接続や車速信号無しで車速を高精度に推定するようにしたものである。 According to the present invention, in the navigation technology, the vehicle ECU can be used even when GPS satellite radio waves are insufficient by using the reference data of the cumulative value of the acceleration value obtained from the acceleration sensor and the vehicle speed obtained from the change amount of the position data by GPS. The vehicle speed is estimated with high accuracy without wiring connection or a vehicle speed signal.
近年、GPSなど情報処理技術の進展に伴い、ナビゲーションシステムの普及がめざましい。ナビゲーションシステムは、自車の位置や向きを周辺地図上に表示したり、指定された目的地への経路を計算し、その経路にそった誘導案内を画面や合成音声などで出力するものである。 In recent years, with the progress of information processing technology such as GPS, the spread of navigation systems is remarkable. The navigation system displays the position and orientation of the vehicle on the surrounding map, calculates the route to the specified destination, and outputs guidance guidance along the route on a screen or synthesized voice. .
多くのナビゲーションシステムは、刻々と変化する自車位置や走行状態を把握するため、GPS、ジャイロ、そして車速信号をシステム本体(すなわち本体ユニット)内に取り込む仕組みとなっている。この中で、車速信号とは、車両(車輌)の速度変化に応じた電圧パルスのことであり、車両ECU(いわゆるエンジンコントロールユニット)から出力される。例えば、特許文献1では、車速センサにより車両の移動速度を検出する例が示されている。
上記のようなカーナビゲーションシステムの本体ユニットを車両に設置する際、車両ECUから出力される車速信号をシステム内に取り込むためには、本体装置との配線を行う必要がある。しかし、車両ECUは、車種によって設置位置が異なるため、車種に応じた配線作業が別途必要となり、取り付けに必要な時間や費用を増加させる一因になるという問題があった。 When the main unit of the car navigation system as described above is installed in the vehicle, it is necessary to perform wiring with the main body device in order to capture the vehicle speed signal output from the vehicle ECU into the system. However, since the installation position of the vehicle ECU differs depending on the vehicle type, wiring work corresponding to the vehicle type is separately required, which causes a problem of increasing the time and cost required for installation.
また、ポータブルタイプのカーナビゲーションシステムでは、車両との脱着を簡便に行えるようにするため、システム本体に車速信号を取り込まない仕様となっている。このため、自車位置算出計算はGPSとジャイロから得られるデータだけに依存することになり、GPSの電波を受信できないような環境では自車位置の精度が著しく悪化する問題があった。 In addition, the portable type car navigation system has a specification in which a vehicle speed signal is not taken into the system body so that the vehicle can be easily attached to and detached from the vehicle. For this reason, the vehicle position calculation calculation depends only on the data obtained from the GPS and the gyro, and there is a problem that the accuracy of the vehicle position is remarkably deteriorated in an environment where GPS radio waves cannot be received.
本発明は、上記のような従来技術の課題を解決するもので、その目的は、ナビゲーションの技術において、加速度センサから得る加速度値の累積値と、GPSによる位置データの変化量から求める車速との対照データの利用により、GPS衛星電波の不十分な場合でも、車両ECUとの配線接続や車速信号無しで車速を高精度に推測することである。 The present invention solves the above-described problems of the prior art, and its purpose is to calculate the cumulative value of acceleration values obtained from an acceleration sensor and the vehicle speed obtained from the amount of change in position data by GPS in navigation technology. By using the reference data, even when GPS satellite radio waves are insufficient, the vehicle speed is estimated with high accuracy without wiring connection with the vehicle ECU or a vehicle speed signal.
上記の目的を達成するため、本発明の一態様では(請求項1、4、7)、GPSを含む航法センサ部と、情報の記憶部及び入出力部と、前記各部を用いて情報処理を行う制御部と、を備え、車両に搭載するナビゲーションシステム(その制御方法、制御プログラム)において、前記制御部により、車両の加速度又は加速度に対応する値を加速度値として取得すると共に、その加速度値を累積した累積値を算出する累積手段(処理)と、GPSで得る位置の変化量に基き車速を算出する車速算出手段(処理)と、同じ時点における前記累積値と前記車速との各組を対応付けて対照データとして前記記憶部に記録する記録手段(処理)と、前記GPSにおける衛星電波の受信状態が不十分な場合に、現時点における前記累積値をもとに、前記対照データを参照し同じ累積値又は近い累積値に対応付けられた車速により、現時点の車速を推定する推定処理(手段)と、を実現することを特徴とする。
In order to achieve the above object, according to one aspect of the present invention (
このように、加速度センサから得る加速度値の累積値と、GPSによる位置データの変化量から求める車速との対照データの利用により、GPS衛星電波の不十分な場合でも、車両ECUとの配線接続や車速信号無しで車速を高精度に推測することが可能となる。 In this way, by using the reference data of the accumulated acceleration value obtained from the acceleration sensor and the vehicle speed obtained from the change amount of the position data by GPS, even when the GPS satellite radio wave is insufficient, the wiring connection with the vehicle ECU It becomes possible to estimate the vehicle speed with high accuracy without a vehicle speed signal.
本発明の他の態様は(請求項2、5、8)、上記各態様において、前記記録手段(処理)は、前記車速又は前記累積値の所定の刻みごとに、その組を前記対照データに組み込んで記録することを特徴とする。
According to another aspect of the present invention (
このように、車速や累積値の所定の刻みごとに対照データを記録することにより、一定時間周期などで記録した場合と比べ、累積値や車速の値が不規則に飛び飛びにならず、値の範囲を問わず良好な推定精度が実現可能となる。 In this way, by recording the reference data for each predetermined increment of the vehicle speed and cumulative value, the cumulative value and the vehicle speed value do not jump irregularly compared to the case of recording at a constant time period, etc. Good estimation accuracy can be realized regardless of the range.
本発明の他の態様は(請求項3、6、9)、上記各態様において、前記記録手段(処理)は、前記対照データに既に車速と共に記録済の累積値と同じ累積値に対応する新たな車速を再度検出した場合、既に記録済の車速と新たな車速との平均値を、その累積値と対応付けて記録することを特徴とする。 According to another aspect of the present invention (Claims 3, 6 and 9), in each of the above aspects, the recording means (process) is a new one corresponding to the same cumulative value as the cumulative value already recorded in the control data together with the vehicle speed. When the vehicle speed is detected again, the average value of the already recorded vehicle speed and the new vehicle speed is recorded in association with the accumulated value.
このように、同じ累積値に対応してある時点で計算され記録された車速がある場合でも、別の時点で計算され記録された車速と平均計算して置換え更新することにより、各時点での乗車人員などの荷重状態、坂道、カーブなどによる誤差が相殺され、車速の推定精度が向上する。 In this way, even when there is a vehicle speed calculated and recorded at a certain time corresponding to the same cumulative value, the vehicle speed calculated and recorded at another time is averaged and replaced and updated, so that Errors due to load conditions of passengers, slopes, curves, etc. are canceled out, and the accuracy of vehicle speed estimation is improved.
以上のように、本発明によれば、ナビゲーションの技術において、加速度センサから得る加速度値の累積値と、GPSによる位置データの変化量から求める車速との対照データの利用により、GPS衛星電波の不十分な場合でも、車両ECUとの配線接続や車速信号無しで車速を高精度に推測することが可能となる。 As described above, according to the present invention, in the navigation technology, the GPS satellite radio wave is not detected by using the reference data of the accumulated acceleration value obtained from the acceleration sensor and the vehicle speed obtained from the change amount of the position data by GPS. Even if it is sufficient, it becomes possible to estimate the vehicle speed with high accuracy without wiring connection with the vehicle ECU or without a vehicle speed signal.
次に、本発明を実施するための最良の実施形態について、図面を参照して説明する。なお、背景技術や課題での説明と共通の前提事項は繰り返さない。 Next, the best mode for carrying out the present invention will be described with reference to the drawings. Note that the assumptions common to the explanation in the background art and the problems are not repeated.
〔1.構成〕
本実施形態は、車両に搭載するナビゲーションシステム(以下「本システム」と呼ぶ)に関するが、その制御方法や制御プログラムとしても把握可能である。まず、図1に本システムの構成要素の例を示す。
[1. Constitution〕
The present embodiment relates to a navigation system (hereinafter referred to as “the present system”) mounted on a vehicle, but can also be grasped as a control method or a control program. First, FIG. 1 shows an example of components of the present system.
すなわち、1は、システム全体の制御部となるメインCPUであり、他の各部を用いて情報処理を行う部分である。また、情報の記憶部の種類や構成は自由であるが、一例として、システム計算領域、プログラム格納領域などを含むSRAM、SDRAM、FLASH ROMなどの主記憶部2に加え、外部記憶装置として、ハードディスク等の書込/読出可能な媒体を用いる記録メディア部5を設けることにより、全体としての記憶部を構成し、記憶する情報の種類やアルゴリズムに応じて主記憶部2と記憶メディア部5を適宜使い分ける。記憶メディア部5上には、データベースである対照データDを記録する。
That is, 1 is a main CPU that is a control unit of the entire system, and is a part that performs information processing using other units. In addition, the type and configuration of the information storage unit are arbitrary. As an example, in addition to the
また、3は、地図、メニューなどの描画制御を行うグラフィックチップなどの表示制御部であり、4は、各デバイスI/F(インタフェース)やチップセットなどのCPU周辺回路部である。また、航法センサ部として、ジャイロセンサを用いる相対方位検出部6と、GPSを用いる絶対位置検出部7と、加速度センサを用いる加速度検出部8と、がある。 Reference numeral 3 denotes a display control unit such as a graphic chip for performing drawing control of maps and menus, and 4 denotes a CPU peripheral circuit unit such as each device I / F (interface) or chip set. As the navigation sensor unit, there are a relative direction detection unit 6 using a gyro sensor, an absolute position detection unit 7 using GPS, and an acceleration detection unit 8 using an acceleration sensor.
また、9は、バック信号、パーキングブレーキ信号、イルミネーション信号等を取り込む車両I/F部である。また、情報の入出力部のうち、出力に関わる部分としては、映像信号を処理する映像信号処理部10と、前記映像信号により地図やメニュー等を実際に表示する液晶表示パネルなどの画面表示部11がある。 Reference numeral 9 denotes a vehicle I / F unit that captures a back signal, a parking brake signal, an illumination signal, and the like. Of the information input / output unit, the output part includes a video signal processing unit 10 that processes a video signal, and a screen display unit such as a liquid crystal display panel that actually displays a map, a menu, and the like using the video signal. There are eleven.
また、図1が示すのは、ナビゲーションシステムのうち、本体部と表示部からなる本体ユニットであり、情報の入力部としては、図示はしないが、この本体ユニットと信号線などで接続された操作スイッチパネルや、リモコンユニットなどがある。 FIG. 1 shows a main unit composed of a main unit and a display unit in the navigation system. As an information input unit, although not shown, an operation connected to the main unit by a signal line or the like is shown. There are switch panels and remote control units.
また、本システムでは、所定の制御プログラムにしたがって、制御部であるメインCPU1により、次のような機能作用に対応する各部11〜14が実現、実行される。すなわち、累積部11(累積手段)は、車両の加速度又は加速度に対応する値を加速度値として取得すると共に、その加速度値を累積した累積値を算出する(累積処理)。また、車速算出部12(車速算出手段)は、GPSで得る位置の変化量に基き車速を算出する(車速算出処理)。また、記録部13(記録手段)は、同じ時点における前記累積値と前記車速との各組を対応付けて対照データD(データベース)として記憶メディア部5に記録する(記録処理)。そして、推定処理部14(推定処理手段)は、前記GPSにおける衛星電波の受信状態が不十分な場合に、現時点における前記累積値をもとに、対照データDを参照し同じ累積値又は近い累積値に対応付けられた車速により、現時点の車速を推定する(推定処理)。 Moreover, in this system, each part 11-14 corresponding to the following functional actions is implement | achieved and performed by main CPU1 which is a control part according to a predetermined control program. That is, the accumulating unit 11 (accumulating means) acquires a vehicle acceleration or a value corresponding to the acceleration as an acceleration value, and calculates a cumulative value obtained by accumulating the acceleration value (accumulating process). Moreover, the vehicle speed calculation part 12 (vehicle speed calculation means) calculates a vehicle speed based on the amount of change in position obtained by GPS (vehicle speed calculation process). Further, the recording unit 13 (recording unit) records each set of the accumulated value and the vehicle speed at the same time in association with each other and records it as the reference data D (database) in the storage media unit 5 (recording process). Then, the estimation processing unit 14 (estimation processing means) refers to the reference data D based on the cumulative value at the present time when the satellite radio wave reception state at the GPS is insufficient, and the cumulative value or the close cumulative value. The current vehicle speed is estimated based on the vehicle speed associated with the value (estimation process).
〔2.作動原理〕
これらの具体的作用原理は、次の通りである。まず、GPS情報(衛星電波)を受信できる状態においては、受信したGPS情報に基づいて算出した車速(単位時間における現在位置の変化量)を自車位置の把握や走行状態の検出に利用し、GPS情報を受信できない場合には、加速度センサ出力の累積値と対照データD(図5)を利用して車速を推測する。
[2. Principle of operation)
The specific principle of these operations is as follows. First, in a state where GPS information (satellite radio waves) can be received, the vehicle speed calculated based on the received GPS information (amount of change in the current position in unit time) is used for grasping the position of the host vehicle and detecting the running state. When the GPS information cannot be received, the vehicle speed is estimated using the accumulated value of the acceleration sensor output and the reference data D (FIG. 5).
加速度検出部8の加速度センサからは、加速度に対応した電圧値が出力されるようになっており、加速度出力の累積値とは、電圧値の累積値ということになる。勿論、加速度そのものを出力する加速度センサを用いる場合には、その数値をそのまま用いても良いことは言うまでもない。これら電圧値と加速度自体を、加速度値と総称するものとする。 The acceleration sensor of the acceleration detector 8 outputs a voltage value corresponding to the acceleration, and the accumulated value of the acceleration output is the accumulated value of the voltage value. Of course, when using an acceleration sensor that outputs the acceleration itself, it goes without saying that the numerical value may be used as it is. These voltage values and acceleration itself are collectively referred to as acceleration values.
このような加速度値として一般的な電圧値を例にとると、電圧値としては、加速する方向(速度が増加する方向)に変化している場合にはプラスの電圧値が出力され、逆に、減速方向(速度が減少する方向)に変化している場合にはマイナスの電圧値が出力されることになる。つまり、車両の停止状態から移動状態に移行した時点からこの加速度に対応する電圧値を累積していく場合、車両が再び停止状態になった時点では、その累積値は0(ゼロ)になっていることになる。 Taking a general voltage value as an example of such an acceleration value, a positive voltage value is output when the voltage value changes in the acceleration direction (the direction in which the speed increases). When the speed changes in the deceleration direction (the direction in which the speed decreases), a negative voltage value is output. That is, when the voltage value corresponding to this acceleration is accumulated from the time when the vehicle is shifted from the stopped state to the moving state, the accumulated value is 0 (zero) when the vehicle is again stopped. Will be.
本件では、このような電圧値などの加速度値の累積値と、GPS情報から算出されたその時点での車速とを、所定時間毎に対応付けて対照データDに記憶しておき、その後、GPS情報が受信できなくなった、或いは、受信出来たとしても、受信情報が少なく車速を算出出来ない場合には、加速度センサ出力に基づき加速度値の累積値を算出し、その累積値に対応する車速を対照データD(図5)から読み出すことにより、GPS情報が受信できないトンネル内等においても車速を推測することが可能となり、より精度の高い位置検出を行うことが出来る。 In this case, the cumulative value of acceleration values such as voltage values and the vehicle speed at that time calculated from the GPS information are stored in the reference data D in association with each predetermined time. If the information cannot be received or can be received, but the received information is small and the vehicle speed cannot be calculated, the cumulative value of the acceleration value is calculated based on the acceleration sensor output, and the vehicle speed corresponding to the cumulative value is calculated. By reading from the reference data D (FIG. 5), it becomes possible to estimate the vehicle speed even in a tunnel where GPS information cannot be received, and more accurate position detection can be performed.
〔3.具体的作用〕
そして、本システムでは、車両の走行速度(車速)を算出するために、加速度センサ出力とGPSの位置データを用いるが、そのための動作は、図2のフローチャートに示すように、受信電波が十分でGPSを使って自車位置認識ができるか否かにより(ステップ30)、以下2つのモードに分けることができる。
[3. (Specific action)
In this system, the acceleration sensor output and GPS position data are used to calculate the traveling speed (vehicle speed) of the vehicle, but the operation for that purpose is as shown in the flowchart of FIG. Depending on whether or not the vehicle position can be recognized using GPS (step 30), it can be divided into the following two modes.
GPSが使えるときは、データベース作成モード(以下単に「作成モード」とも呼ぶ)となり(ステップ31)、加速度センサ出力だけでなくGPS位置データである絶対位置座標も単位時間ごとに取り込み、記憶部に格納することができる。これをもとに、車速は、GPS位置データの時間あたり変化量から求め(ステップ32)、GPS、ジャイロ出力と共に自車位置算出計算に用いる(ステップ33)。 When GPS can be used, the database creation mode (hereinafter also referred to simply as “creation mode”) is entered (step 31), and not only the acceleration sensor output but also the absolute position coordinates, which are GPS position data, are taken in every unit time and stored in the storage unit. can do. Based on this, the vehicle speed is obtained from the amount of change per hour in the GPS position data (step 32), and used for the calculation of the vehicle position together with the GPS and gyro output (step 33).
また、作成モードでは、GPSに基いて得た車速を、加速度検出部8から出力される加速度値の累積値とともに記憶メディア部5に格納し、車速と累積値をデータベース化するが、この点は図3にしたがい後述する。GPS電波受信状態にある時は常にこの作成モードが動作し、データベースである対照データDがより高精度なものとなるように更新していく。 In the creation mode, the vehicle speed obtained based on the GPS is stored in the storage media unit 5 together with the accumulated acceleration value output from the acceleration detecting unit 8, and the vehicle speed and accumulated value are stored in a database. This will be described later with reference to FIG. This creation mode operates whenever the GPS radio wave is received, and the reference data D, which is a database, is updated so as to have higher accuracy.
GPSが使えないときは、データベース活用モード(以下「活用モード」とも呼ぶ)となり(ステップ41)、車速は、車両が走行を始めてからの加速度値の累積値をもとに、記憶メディア5内のデータベースを照合し累積値に対応して記録された車速に基き決定するが(ステップ42)、この点は図4にしたがい後述する。そして、決定した車速を自車位置計算に用いる(ステップ43)。このようにして、GPSからの位置データが受信できない状態においても車速を推定することができる。 When the GPS cannot be used, the database utilization mode (hereinafter also referred to as “utilization mode”) is set (step 41), and the vehicle speed is stored in the storage medium 5 based on the accumulated acceleration value since the vehicle started traveling. The database is checked and determined based on the vehicle speed recorded corresponding to the accumulated value (step 42), which will be described later with reference to FIG. Then, the determined vehicle speed is used for the own vehicle position calculation (step 43). In this way, the vehicle speed can be estimated even in a state where position data from GPS cannot be received.
いずれのモードでも、自車位置算出計算などの結果に基き、自車位置の表示を更新するが(ステップ34、44)、各モードについて、以下により具体的に説明する。 In any mode, the display of the vehicle position is updated based on the result of the vehicle position calculation calculation or the like (steps 34 and 44). Each mode will be described in detail below.
〔3−1.作成モード〕
作成モードでは、図3のフローチャートに例示するように、単位時間ごとに、絶対位置検出部7でGPSにより検出される絶対位置と、加速度検出部8で検出する加速度出力である加速度値と、をCPU1が監視し(ステップ11)、変化がない状態は「車両停止状態」とみなす(ステップ12)。すなわち、絶対位置、加速度値に変化が検出された時点を「車両走行開始」とみなし(ステップ12)、ここを基点として以後、単位時間ごとに絶対位置と加速度値を(ステップ11)記憶部2に取り込む(ステップ13)。
[3-1. (Create mode)
In the creation mode, as illustrated in the flowchart of FIG. 3, for each unit time, an absolute position detected by the GPS by the absolute position detection unit 7 and an acceleration value that is an acceleration output detected by the acceleration detection unit 8 are obtained. The
そして、CPU1では、これらデータのうち、絶対位置のデータについては、車速算出部12が、単位時間ごとの位置変化(移動距離)から車速を算出し(ステップ14)、算出結果を記録部13が、単位時間ごとに記憶メディア部5へ格納していく(ステップ16)。なお、算出した車速は、図2のステップ33で示した通り、自車位置計算に適用する(ステップ15)。
In the
また、加速度値については、単位時間ごとの加速度センサ出力であり、累積部11が、この値を累積していくことで車速変化に対応するデータである累積値を得て(ステップ14)、単位時間ごとのデータの累積値を記録部13が、、位置データと同期した形で記憶メディア部5へ対照データDとして格納し(ステップ16)、加速度累積値を保持したままループの先頭(ステップ11)に戻る(ステップ17)。 Further, the acceleration value is an acceleration sensor output per unit time, and the accumulating unit 11 obtains an accumulated value that is data corresponding to a change in vehicle speed by accumulating this value (step 14). The recording unit 13 stores the accumulated value of the data for each time as reference data D in the storage media unit 5 in a form synchronized with the position data (step 16), and retains the accumulated acceleration value at the head of the loop (step 11). (Step 17).
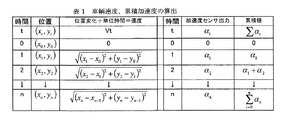
ここで、図4に示す表1は、車速と、累積加速度すなわち累積値の、算出の具体的内容を示すもので、この結果、速度Vと累積値Σαのデータが、記憶メディア部5へ、データベースである対照データDとして格納される。その概念例を図5の表2に示す。このデータベースを用いることで、累積値Σαの値から、車速Vを決定することができる。 Here, Table 1 shown in FIG. 4 shows the specific contents of the calculation of the vehicle speed and the cumulative acceleration, that is, the cumulative value. As a result, the data of the speed V and the cumulative value Σα are transferred to the storage media unit 5. It is stored as control data D which is a database. An example of the concept is shown in Table 2 of FIG. By using this database, the vehicle speed V can be determined from the cumulative value Σα.
〔3−2.データベース活用モード〕
活用モードは、上記のように累積値Σαから速度Vを決定するものである。このため、予め、作成モードにより図5に示す表2のようなデータベースが記憶メディア部5に作成されている。このデータベースは、GPSからの位置情報が受信できない状態の時に、加速度値の累積値とデータベースを比較することで車速を決定するのに用いる。
[3-2. Database utilization mode)
In the utilization mode, the speed V is determined from the cumulative value Σα as described above. For this reason, a database as shown in Table 2 shown in FIG. This database is used to determine the vehicle speed by comparing the accumulated acceleration value and the database when position information from the GPS cannot be received.
活用モードでは、車両走行開始以後、単位時間ごとに加速度検出部8の出力である加速度値を累積していき(Σα)、このように累積したΣαに最も近い値を記憶メディア部5の中のデータベース(対照データD)から検索し、該当するΣα時の速度Vを車速と決定し、自車位置計算に用いる。 In the utilization mode, the acceleration value that is the output of the acceleration detection unit 8 is accumulated every unit time after the vehicle starts running (Σα), and the value closest to the accumulated Σα is stored in the storage media unit 5. A search is made from the database (control data D), the speed V at the time of the corresponding Σα is determined as the vehicle speed, and used for the calculation of the vehicle position.
具体的には、図6のフローチャートに示すように、単位時間ごとに得る加速度値に(ステップ21)変化すなわち加速度発生があると(ステップ22)、その加速度値を記憶部2に取り込むと共に(ステップ23)、累積部11が累積値を算出する(ステップ24)。そして、推定処理部14は、累積値と記憶メディア部5内のデータベースである対照データDを比較し(ステップ25)、累積値に相当する車速を検索し(ステップ26)、これを自車位置計算に適用し(ステップ27)、加速度累積値を保持したままループの先頭(ステップ21)に戻る(ステップ28)。
Specifically, as shown in the flowchart of FIG. 6, when an acceleration value obtained per unit time (step 21), that is, when an acceleration occurs (step 22), the acceleration value is taken into the storage unit 2 (step 22). 23) The accumulating unit 11 calculates the accumulated value (step 24). Then, the
なお、累積値Σαと全く同一の累積が対照データD中にない場合は、その前後の累積値に対応する各車速をもとに、それぞれに対する累積値での乖離幅の割合に応じた加重平均計算等による線形補正により車速を計算する。 If the cumulative value Σα is not identical to the cumulative value Σα in the control data D, the weighted average corresponding to the ratio of the divergence width with respect to the cumulative value based on the vehicle speeds corresponding to the cumulative values before and after the cumulative value Σα. The vehicle speed is calculated by linear correction by calculation.
〔4.効果〕
以上のように、本実施形態では、加速度センサから得る加速度値の累積値と、GPSによる位置データの変化量から求める車速との対照データの利用により、トンネル内、ビルや大木の陰などGPS衛星電波の不十分な場合でも、車両ECUとの配線接続や車速信号無しで車速を高精度に推測することが可能となる。また、これにより、ナビゲーションシステムを車両に取り付ける際の配線作業における工数や費用が削減でき、ポータブルタイプのナビゲーションシステムにおいても車速や自車位置の認識精度が向上する。
[4. effect〕
As described above, in the present embodiment, GPS satellites such as tunnels, shadows of buildings and large trees are used by using the reference data of the cumulative value of acceleration values obtained from the acceleration sensor and the vehicle speed obtained from the amount of change in position data by GPS. Even when the radio wave is insufficient, the vehicle speed can be estimated with high accuracy without wiring connection with the vehicle ECU or without a vehicle speed signal. This also reduces the man-hours and costs in wiring work when the navigation system is attached to the vehicle, and the recognition accuracy of the vehicle speed and the vehicle position is improved even in a portable navigation system.
〔5.他の実施形態〕
なお、本発明は上記実施形態に限定されるものではなく、以下に例示するもの及びそれ以外の、他の実施形態も含むものである。例えば、上記実施形態では、加速度センサ出力である加速度値の累積値とGPSによる車速を「所定時間毎」に検出してデータベース化する例を示したが、対応関係の得られた累積値や車速の値が不規則に飛び飛びになると、線形補正等を行っても値の範囲によって精度が異なるなど、その後の処理に利用しにくい場合も考えられる。
[5. Other embodiments]
In addition, this invention is not limited to the said embodiment, The thing illustrated below and other embodiment other than that are included. For example, in the above-described embodiment, an example in which the accumulated value of the acceleration value that is the acceleration sensor output and the vehicle speed by the GPS is detected at “every predetermined time” to create a database is shown. If the value of the value fluctuates irregularly, the accuracy may vary depending on the range of the value even if linear correction or the like is performed, and it may be difficult to use for subsequent processing.
そこで、予め所定間隔に設定した累積値になる毎にその時の車速を取得してデータベース化することが望ましい。この場合、記録部13が、車速又は累積値の所定の刻みごとに、その組を対照データDに組み込んで記録する。例えば、累積値を所定間隔で固定とした例としては、
累積値 速度V
Σα(v)(km/h)
1 V1
2 V2
3 V3
4 V4
5 V5
: :
のような例が考えられるが、速度の側を所定間隔で固定(例えば、5km/h、10km/h、15km/h、20km/h …)しても良い。
Therefore, it is desirable that the vehicle speed at that time is acquired and stored in a database every time the accumulated value is set in advance at a predetermined interval. In this case, the recording unit 13 records the set by incorporating the set into the control data D at every predetermined increment of the vehicle speed or the accumulated value. For example, as an example where the cumulative value is fixed at a predetermined interval,
Cumulative value V
Σα (v) (km / h)
1 V1
2 V2
3 V3
4 V4
5 V5
::
However, the speed side may be fixed at a predetermined interval (for example, 5 km / h, 10 km / h, 15 km / h, 20 km / h...).
このように、車速や累積値の所定の刻みごとに対照データを記録することは、必須ではないが、これにより、一定時間周期などで記録した場合と比べ、累積値や車速の値が不規則に飛び飛びにならず、値の範囲を問わず良好な推定精度が実現可能となる。 As described above, it is not essential to record the reference data for each predetermined increment of the vehicle speed and the accumulated value, but this makes the accumulated value and the vehicle speed value irregular as compared with the case of recording at a constant time period. Therefore, good estimation accuracy can be realized regardless of the range of values.
更に、車速の推定精度を向上する為、既に記憶されている「累積値」に対する「車速」を再度検出した場合、それらの平均値を記憶するようにしても良い。この場合、対照データDに既に車速と共に記録済の累積値と同じ累積値に対応する新たな車速を車速計算部12が再度検出した場合、記録部13は、既に記録済の車速と新たな車速との平均値を、その累積値と対応付けて記録する。 Furthermore, in order to improve the estimation accuracy of the vehicle speed, when the “vehicle speed” with respect to the “accumulated value” that has already been stored is detected again, the average value thereof may be stored. In this case, when the vehicle speed calculation unit 12 detects again a new vehicle speed corresponding to the same accumulated value as the already recorded value together with the vehicle speed in the control data D, the recording unit 13 determines the already recorded vehicle speed and the new vehicle speed. Is recorded in association with the accumulated value.
このように、同じ累積値に対応してある時点で計算され記録された車速がある場合でも、別の時点で計算され記録された車速と平均計算して置換え更新することは、必須ではないが、これにより、各時点での乗車人員などの荷重状態、坂道、カーブなどによる誤差が相殺され、車速の推定精度が向上する。 Thus, even if there is a vehicle speed calculated and recorded at a certain time corresponding to the same cumulative value, it is not essential to replace and update the vehicle speed calculated and recorded at another time and average. As a result, errors due to the load state of the passengers at each time point, slopes, curves, etc. are canceled out, and the estimation accuracy of the vehicle speed is improved.
1…メインCPU
2…主記憶部
3…表示制御部
4…CPU周辺回路部
5…記憶メディア部
D…対照データ
6…相対方位検出部
7…絶対位置検出部
8…加速度検出部
9…車両インタフェース部
10…映像信号処理部
11…画面表示部
1 ... Main CPU
2 ... main storage unit 3 ... display control unit 4 ... CPU peripheral circuit unit 5 ... storage media unit D ... control data 6 ... relative orientation detection unit 7 ... absolute position detection unit 8 ... acceleration detection unit 9 ... vehicle interface unit 10 ... video Signal processing unit 11 ... screen display unit
Claims (9)
前記制御部により、
車両の加速度又は加速度に対応する値を加速度値として取得すると共に、その加速度値を累積した累積値を算出する累積手段と、
GPSで得る位置の変化量に基き車速を算出する車速算出手段と、
同じ時点における前記累積値と前記車速との各組を対応付けて対照データとして前記記憶部に記録する記録手段と、
前記GPSにおける衛星電波の受信状態が不十分な場合に、現時点における前記累積値をもとに、前記対照データを参照し同じ累積値又は近い累積値に対応付けられた車速により、現時点の車速を推定する推定処理手段と、
を実現することを特徴とするナビゲーションシステム。 In a navigation system that includes a navigation sensor unit including a GPS, an information storage unit and an input / output unit, and a control unit that performs information processing using each unit, and is mounted on a vehicle,
By the control unit,
Accumulating means for obtaining a vehicle acceleration or a value corresponding to the acceleration as an acceleration value and calculating a cumulative value obtained by accumulating the acceleration value;
Vehicle speed calculating means for calculating a vehicle speed based on a change in position obtained by GPS;
Recording means for associating and recording each set of the accumulated value and the vehicle speed at the same time in the storage unit;
When the satellite radio wave reception state in the GPS is insufficient, the current vehicle speed is determined by referring to the reference data and the vehicle speed associated with the same cumulative value or a close cumulative value based on the cumulative value at the current time. An estimation processing means for estimating;
The navigation system characterized by realizing.
ことを特徴とする請求項1記載のナビゲーションシステム。 The navigation system according to claim 1, wherein the recording unit records the set by incorporating the set into the reference data at predetermined intervals of the vehicle speed or the accumulated value.
前記対照データに既に車速と共に記録済の累積値と同じ累積値に対応する新たな車速を再度検出した場合、既に記録済の車速と新たな車速との平均値を、その累積値と対応付けて記録する
ことを特徴とする請求項1又は2記載のナビゲーションシステム。 The recording means includes
When a new vehicle speed corresponding to the same cumulative value as the cumulative value already recorded with the vehicle speed is detected again in the control data, the average value of the already recorded vehicle speed and the new vehicle speed is associated with the cumulative value. The navigation system according to claim 1, wherein the navigation system is recorded.
前記制御部により、
車両の加速度又は加速度に対応する値を加速度値として取得すると共に、その加速度値を累積した累積値を算出する累積処理と、
GPSで得る位置の変化量に基き車速を算出する車速算出処理と、
同じ時点における前記累積値と前記車速との各組を対応付けて対照データとして前記記憶部に記録する記録処理と、
前記GPSにおける衛星電波の受信状態が不十分な場合に、現時点における前記累積値をもとに、前記対照データを参照し同じ累積値又は近い累積値に対応付けられた車速により、現時点の車速を推定する推定処理と、
を実行することを特徴とするナビゲーションシステムの制御方法。 In a control method for a navigation system mounted on a vehicle, comprising a navigation sensor unit including a GPS, a storage unit and an input / output unit for information, and a control unit that performs information processing using each unit,
By the control unit,
Accumulating processing for obtaining a vehicle acceleration or a value corresponding to the acceleration as an acceleration value and calculating a cumulative value obtained by accumulating the acceleration value;
A vehicle speed calculation process for calculating a vehicle speed based on a change in position obtained by GPS;
A recording process in which each set of the accumulated value and the vehicle speed at the same time is associated with each other and recorded in the storage unit as reference data;
When the satellite radio wave reception state in the GPS is insufficient, the current vehicle speed is determined based on the vehicle speed associated with the same cumulative value or a close cumulative value with reference to the reference data based on the cumulative value at the current time. An estimation process to estimate;
A control method for a navigation system, characterized in that
ことを特徴とする請求項4記載のナビゲーションシステムの制御方法。 5. The navigation system control method according to claim 4, wherein the recording process includes recording the set by incorporating the set into the reference data at predetermined intervals of the vehicle speed or the accumulated value.
前記対照データに既に車速と共に記録済の累積値と同じ累積値に対応する新たな車速を再度検出した場合、既に記録済の車速と新たな車速との平均値を、その累積値と対応付けて記録する
ことを特徴とする請求項4又は5記載のナビゲーションシステムの制御方法。 The recording process includes
When a new vehicle speed corresponding to the same cumulative value as the cumulative value already recorded with the vehicle speed is detected again in the control data, the average value of the already recorded vehicle speed and the new vehicle speed is associated with the cumulative value. 6. The navigation system control method according to claim 4, wherein recording is performed.
前記制御部により、
車両の加速度又は加速度に対応する値を加速度値として取得すると共に、その加速度値を累積した累積値を算出する累積処理と、
GPSで得る位置の変化量に基き車速を算出する車速算出処理と、
同じ時点における前記累積値と前記車速との各組を対応付けて対照データとして前記記憶部に記録する記録処理と、
前記GPSにおける衛星電波の受信状態が不十分な場合に、現時点における前記累積値をもとに、前記対照データを参照し同じ累積値又は近い累積値に対応付けられた車速により、現時点の車速を推定する推定処理と、
を実行させることを特徴とするナビゲーションシステムの制御プログラム。 In a control program for a navigation system mounted on a vehicle, comprising a navigation sensor unit including a GPS, an information storage unit and an input / output unit, and a control unit that performs information processing using each of the units,
By the control unit,
Accumulating processing for obtaining a vehicle acceleration or a value corresponding to the acceleration as an acceleration value and calculating a cumulative value obtained by accumulating the acceleration value;
A vehicle speed calculation process for calculating a vehicle speed based on a change in position obtained by GPS;
A recording process in which each set of the accumulated value and the vehicle speed at the same time is associated with each other and recorded in the storage unit as reference data;
When the satellite radio wave reception state in the GPS is insufficient, the current vehicle speed is determined based on the vehicle speed associated with the same cumulative value or a close cumulative value with reference to the reference data based on the cumulative value at the current time. An estimation process to estimate;
A navigation system control program characterized in that
ことを特徴とする請求項7記載のナビゲーションシステムの制御プログラム。 The navigation system control program according to claim 7, wherein the recording process records the set by incorporating the set in the reference data at predetermined intervals of the vehicle speed or the accumulated value.
前記対照データに既に車速と共に記録済の累積値と同じ累積値に対応する新たな車速を再度検出した場合、既に記録済の車速と新たな車速との平均値を、その累積値と対応付けて記録する
ことを特徴とする請求項7又は8記載のナビゲーションシステムの制御プログラム。 The recording process includes
When a new vehicle speed corresponding to the same cumulative value as the cumulative value already recorded with the vehicle speed is detected again in the control data, the average value of the already recorded vehicle speed and the new vehicle speed is associated with the cumulative value. 9. The navigation system control program according to claim 7 or 8, wherein the program is recorded.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005098697A JP4593341B2 (en) | 2005-03-30 | 2005-03-30 | Navigation system, control method thereof, and control program |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005098697A JP4593341B2 (en) | 2005-03-30 | 2005-03-30 | Navigation system, control method thereof, and control program |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006275936A JP2006275936A (en) | 2006-10-12 |
| JP4593341B2 true JP4593341B2 (en) | 2010-12-08 |
Family
ID=37210846
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005098697A Expired - Fee Related JP4593341B2 (en) | 2005-03-30 | 2005-03-30 | Navigation system, control method thereof, and control program |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4593341B2 (en) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5552744B2 (en) * | 2009-02-10 | 2014-07-16 | 日本精工株式会社 | Electric power steering device |
| KR102150730B1 (en) * | 2014-05-16 | 2020-09-01 | 주식회사 엘지유플러스 | Method of displaying menu entry of navigation and the navigation |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2856310B2 (en) * | 1994-04-01 | 1999-02-10 | ソニー株式会社 | Speed detection device and navigation device |
| JPH07286853A (en) * | 1994-04-15 | 1995-10-31 | Nissan Motor Co Ltd | Position detector for vehicle |
| JP2856312B2 (en) * | 1994-07-07 | 1999-02-10 | ソニー株式会社 | Speed detector |
| JP3380404B2 (en) * | 1995-08-28 | 2003-02-24 | 日本政策投資銀行 | Movement detection device |
| JPH109877A (en) * | 1996-06-21 | 1998-01-16 | Omron Corp | Car speed detection device and navigator using the same |
| JPH10307032A (en) * | 1997-05-02 | 1998-11-17 | Pioneer Electron Corp | Navigator |
| JP4085463B2 (en) * | 1998-04-10 | 2008-05-14 | ソニー株式会社 | Speed measuring method and speed measuring device |
| JP3727489B2 (en) * | 1999-06-01 | 2005-12-14 | 三菱電機株式会社 | Locator device |
| JP4595215B2 (en) * | 2001-03-01 | 2010-12-08 | ソニー株式会社 | POSITION INFORMATION DETECTING DEVICE, Acceleration Sensor Output Correction Method, and Acceleration Sensor Output Correction Program |
| JP4110742B2 (en) * | 2001-03-19 | 2008-07-02 | 松下電器産業株式会社 | Navigation device |
-
2005
- 2005-03-30 JP JP2005098697A patent/JP4593341B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006275936A (en) | 2006-10-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5057952B2 (en) | Angular velocity correction device, correction method thereof, and navigation device | |
| EP2362184A1 (en) | Mobile navigation device | |
| JP7205157B2 (en) | Information processing system, program, and information processing method | |
| CN101464156B (en) | Travel track recording apparatus, portable electronic apparatus and method thereof | |
| JPH10132843A (en) | Velocity operating equipment | |
| JP4522487B2 (en) | POSITION INFORMATION DETECTING DEVICE, POSITION INFORMATION DETECTING METHOD, POSITION INFORMATION DETECTING PROGRAM, AND STORAGE MEDIUM | |
| US20080243384A1 (en) | Azimuth determination apparatus, azimuth determination method and azimuth determination program | |
| US20140005930A1 (en) | Locating mobile devices | |
| US20090234575A1 (en) | Navigation device and method | |
| CN110579619A (en) | Vehicle speed measuring and positioning method and device and electronic equipment | |
| JP4593341B2 (en) | Navigation system, control method thereof, and control program | |
| JP4677794B2 (en) | Corner information providing device | |
| US10977934B2 (en) | Information providing system, vehicle-mounted device, and information providing method | |
| JP5891120B2 (en) | Speed calculation device, speed calculation method, speed calculation program, and recording medium | |
| JP2006226824A (en) | Vehicle information reporting device | |
| EP1980822A1 (en) | Navigation device, navigation method, program therefor, and recording medium therefor | |
| JP4824522B2 (en) | In-vehicle device | |
| JP4987872B2 (en) | Information recording apparatus, information recording method, information recording program, and computer-readable recording medium | |
| JP4595215B2 (en) | POSITION INFORMATION DETECTING DEVICE, Acceleration Sensor Output Correction Method, and Acceleration Sensor Output Correction Program | |
| JP2006317287A (en) | Present position determination device for vehicle | |
| JP5916540B2 (en) | Speed calculation device, speed calculation method, speed calculation program, and recording medium | |
| CN118597130B (en) | Cruise speed control method, device, equipment and computer readable storage medium | |
| CN115113237B (en) | Positioning deviation correction method and positioning deviation correction system | |
| JP2019156198A (en) | Vehicle position determination device | |
| JPH10153444A (en) | Navigation device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080324 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100826 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100907 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100915 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130924 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |