JP4565078B2 - Winding machine - Google Patents
Winding machine Download PDFInfo
- Publication number
- JP4565078B2 JP4565078B2 JP2009545017A JP2009545017A JP4565078B2 JP 4565078 B2 JP4565078 B2 JP 4565078B2 JP 2009545017 A JP2009545017 A JP 2009545017A JP 2009545017 A JP2009545017 A JP 2009545017A JP 4565078 B2 JP4565078 B2 JP 4565078B2
- Authority
- JP
- Japan
- Prior art keywords
- planetary gear
- nozzle support
- nozzle
- winding machine
- crank member
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images























Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K15/00—Methods or apparatus specially adapted for manufacturing, assembling, maintaining or repairing of dynamo-electric machines
- H02K15/08—Forming windings by laying conductors into or around core parts
- H02K15/095—Forming windings by laying conductors into or around core parts by laying conductors around salient poles
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/12—Stationary parts of the magnetic circuit
- H02K1/14—Stator cores with salient poles
- H02K1/146—Stator cores with salient poles consisting of a generally annular yoke with salient poles
- H02K1/148—Sectional cores
Description
本発明は巻線機に関する。なお、本出願は2008年6月11日に出願された日本国特許出願2008−153488号に基づく優先権を主張しており、その出願の全内容は本明細書中に参照として組み入れられている。 The present invention relates to a winding machine. Note that this application claims priority based on Japanese Patent Application No. 2008-153488 filed on June 11, 2008, the entire contents of which are incorporated herein by reference. .
巻線機は、例えば、モータや発電機などのステータコアのティース部(磁極ティース)にコイルを巻く装置として用いられる。モータ10のステータコア20は、例えば、図1に示すように、環状の部材で、複数のティース部22がスロット24を挟んで周方向に均等に配設されており、コイル26は、各ティース部22に巻かれている。当該ステータコア20の内側には、ロータ40(回転子)が配設されている。
The winding machine is used, for example, as a device that winds a coil around a teeth portion (magnetic teeth) of a stator core such as a motor or a generator. For example, as shown in FIG. 1, the
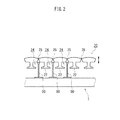
コイル26は、巻線機のノズルをティース部22の外周に沿って移動させて、当該ノズルから繰出される線材をティース部22の外周に巻いている。ステータコア20には、図2に示すように、スロット24の一部を分離できる構造にし、さらにスロット24にヒンジ25を設けて、平らに開くことができる構造を備えたステータコア20がある。かかるステータコア20は、スロット24の開口部が広くなり、コイル26を形成する際に、巻線機1のノズル50の取り回しが容易になる。そして、ティース部22にコイル26を形成してから、ステータコア20を環状に変形させて端部を連結する。このステータコア20のスロット24に対するコイル26の占有率を高めることによって、ティース部22に巻かれたコイル26の量を多くすることができ、モータ10の性能を向上させることができる。
The
かかるステータコアに線材を巻く巻線装置は、例えば、日本国特許出願公開2001−8418号公報(特許文献1)、日本国特許出願公開2004−72923号公報(特許文献2)が開示されている。 For example, Japanese Patent Application Publication No. 2001-8418 (Patent Document 1) and Japanese Patent Application Publication No. 2004-72923 (Patent Document 2) are disclosed as winding devices for winding a wire around the stator core.
日本国特許出願公開2001−8418号公報には、大型のクランク機構を備え、アームを揺動させつつノズルの楕円軌道を形成する装置に開示されている。 Japanese Patent Application Publication No. 2001-8418 discloses an apparatus having a large crank mechanism and forming an elliptical orbit of a nozzle while swinging an arm.
また、日本国特許出願公開2004−72923号公報は、正方形及び長方形の軌跡を形成する装置が開示されており、当該軌跡に沿ってノズルを移動させる巻線装置が開示されている。同公報では、互いに直交するX方向およびY方向にそれぞれ延びる長孔状のY方向受動用ガイド孔およびX方向受動用ガイド孔が形成されたノズル支持プレートにノズルが支持されている。そして、ノズル支持プレートは、X方向及びY方向にそれぞれ駆動させる駆動系を組み合わせて制御されている。 Japanese Patent Application Publication No. 2004-72923 discloses a device that forms square and rectangular trajectories, and discloses a winding device that moves a nozzle along the trajectories. In this publication, a nozzle is supported by a nozzle support plate in which a long hole-shaped Y-direction passive guide hole and an X-direction passive guide hole extending in the X direction and the Y direction orthogonal to each other are formed. The nozzle support plate is controlled by combining drive systems that drive in the X direction and the Y direction, respectively.
巻線装置では、ステータコアに線材を速く巻いて生産性を向上させたい。特許文献1に開示された装置は、大型のクランク機構と揺動スライダ機構とを備え、アームを揺動させつつ進退させ、ノズルの楕円軌道を形成している。かかるアームを揺動させる構造では、ノズルの旋回速度をそれほど速くすることができない。また、特許文献2では、ノズル支持プレートは、X方向およびY方向にそれぞれ駆動させる駆動系を組み合わせて制御されている。このためX方向及びY方向に複雑に力がノズル支持プレートに作用し、ノズルの旋回速度についてもそれほど速くすることができない。
In a winding device, we want to improve productivity by winding a wire around a stator core quickly. The device disclosed in
本発明に係る巻線機は、線材を繰出すノズルと、当該ノズルを支持するノズル支持体と、前記ノズル支持体を旋回させる駆動機構とを備えている。駆動機構は、クランクケースと、内周太陽歯車と、遊星歯車部材と、クランク部材とを備えている。内周太陽歯車は、クランクケースに固定的に配設されている。遊星歯車部材は、内周太陽歯車に遊星歯車を噛み合わせつつ自転および公転する。クランク部材は、内周太陽歯車の中心線と同軸に回転するようにクランクケースに配設され、遊星歯車部材を自転および公転可能に支持する。また、遊星歯車は、内周太陽歯車のピッチ円直径の2分の1のピッチ円直径を有している。遊星歯車部材は、遊星歯車のピッチ円上からずらした位置に遊星歯車の自転および公転に伴って楕円軌道で駆動する作用部を有している。ノズル支持体は当該作用部に連結されている。 The winding machine according to the present invention includes a nozzle that feeds a wire, a nozzle support that supports the nozzle, and a drive mechanism that rotates the nozzle support. The drive mechanism includes a crankcase, an inner peripheral sun gear, a planetary gear member, and a crank member. The inner peripheral sun gear is fixedly disposed on the crankcase. The planetary gear member rotates and revolves while meshing the planetary gear with the inner peripheral sun gear. The crank member is disposed in the crankcase so as to rotate coaxially with the center line of the inner peripheral sun gear, and supports the planetary gear member so that it can rotate and revolve. Further, the planetary gear has a pitch circle diameter that is a half of the pitch circle diameter of the inner circumferential sun gear. The planetary gear member has an action portion that is driven by an elliptical orbit along with the rotation and revolution of the planetary gear at a position shifted from the pitch circle of the planetary gear. The nozzle support is connected to the action part.
この巻線機によれば、駆動機構は、クランク部材によって支持された遊星歯車を、内周太陽歯車に噛み合わせつつ遊星歯車部材を自転および公転させることによって、作用部を楕円軌道で駆動させる。クランク部材の回転運動、および、遊星歯車部材の自転および公転を速くすることによって、ノズル支持体の旋回速度を格段に速くすることができる。 According to this winding machine, the drive mechanism rotates the planetary gear member while rotating the planetary gear supported by the crank member with the inner peripheral sun gear and revolves the planetary gear member, thereby driving the action portion in an elliptical orbit. By making the rotational movement of the crank member and the rotation and revolution of the planetary gear member faster, the turning speed of the nozzle support can be made much faster.
以下、本発明の一実施形態に係る巻線機を図面に基づいて説明する。なお、異なる実施形態においても同一の作用を奏する部材、部位には同じ符号を付している。 Hereinafter, a winding machine according to an embodiment of the present invention will be described with reference to the drawings. In addition, the same code | symbol is attached | subjected to the member and site | part which show | plays the same effect | action also in different embodiment.
この巻線機1000は、図3及び図4に示すように、ノズル501〜503を支持するノズル支持体600と、ケーシング700と、駆動機構100とを備えている。図4中、符号Pは、ノズル501〜503から供給される線材510を、ステータコア(図示省略)のティース部に巻く、巻線機1000の捲回部を示している。
As shown in FIGS. 3 and 4, the
≪ノズル支持体600≫
ノズル支持体600は、図3に示すように、ノズル501〜503を支持している。ノズル501〜503は、線材を繰出す線材の供給部である。この実施形態では、ノズル支持体600は、略ひし形のプレート部材で構成されている。そして、ステータコア20の3つのティース部22(図2参照)に、同時に線材510を巻くことができるように、ノズル支持体600の略中央部に3つのノズル501〜503が所定の間隔で横に並べて取り付けられている。このノズル支持体600は、ケーシング700に収容されており、駆動機構100の作用部105に連結されて楕円軌道Aで旋回する。≪
As shown in FIG. 3, the
≪駆動機構100≫
次に、駆動機構100を説明する。駆動機構100は、ノズル支持体600を旋回させる機構である。この実施形態では、図3に示すように、ノズル支持体600の両側部620、630(この実施形態では、ひし形の頂点部分)が、それぞれ駆動機構100の作用部105に連結されている。<<
Next, the
この駆動機構100は、図4及び図5に示すように、クランクケース101と、内周太陽歯車102と、遊星歯車部材103と、クランク部材104とを備えている。上述した作用部105は、遊星歯車部材103に設けられている。
As shown in FIGS. 4 and 5, the
≪クランクケース101≫
クランクケース101は、図4に示すように、駆動機構100の各部材を収容するケースである。この実施形態では、クランクケース101は、底を有する筒状の部材であり、図4では、底部111を右側に向け、開口112を左側に向けて横向きに配設されている。このクランクケース101は、開口112側の第1部材101aと、底部111側の第2部材101bとを、軸方向の中間部で組み合わせた構造を備えている。この実施形態では、クランクケース101は、開口112の端部が上述したケーシング700に取り付けられている。≪Crankcase 101≫
As shown in FIG. 4, the
クランクケース101の内部には、クランク部材104や内周太陽歯車102など、駆動機構100の各部材を収容するスペースが形成されている。クランクケース101の底部111には、クランク部材104の軸部154を挿通させる挿通穴113が、底部111の中心に形成されている。
Inside the
≪内周太陽歯車102≫
内周太陽歯車102は、内周面に歯を有する内歯車であり、クランクケース101の内周面の中間位置に形成された段差121に固定されている。≪
The inner
≪遊星歯車部材103≫
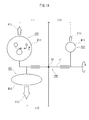
遊星歯車部材103は、図4に示すように、内周太陽歯車102に遊星歯車131を噛み合わせつつ自転及び公転する部材である。この実施形態では、遊星歯車部材103は、図6A及び図6Bに示すように、遊星歯車131と遊星軸132によって構成されている。遊星歯車131は、外周面に歯を有する外歯車であり、内周太陽歯車102のピッチ円直径の2分の1のピッチ円直径を有している。すなわち、図7に示すように、遊星歯車131のピッチ円103cの半径r1と、内周太陽歯車102のピッチ円102cの半径r2との比は、r1:r2=1:2である。この実施形態では、図4及び図9に示すように、遊星歯車131の中心部にはボス部141が設けられており、当該ボス部141が、遊星軸132の端部に装着されている。遊星歯車部材103は、遊星歯車131の回転軸方向の無限遠点から見て、遊星歯車131のピッチ円103c上からずらした位置に遊星歯車131の自転及び公転に伴って楕円軌道Aで駆動する作用部105を有している。図7中、c3は、作用部105の中心を示している。≪
As shown in FIG. 4, the
≪作用部105≫
作用部105は、この実施形態では、図6Aに示すように、遊星軸132に遊星歯車131が装着されたのとは反対側の端部に設けられている。作用部105は、ピン形状の部位で、図6Bに示すように、遊星軸132の中心軸c2から半径方向にずれた位置に設けられている。この作用部105は、図7に示すように、遊星歯車131のピッチ円103cよりも内側に配設されている。<<
In this embodiment, as shown in FIG. 6A, the
≪遊星歯車部材103に取り付けられたバランサー≫
また、この実施形態では、遊星歯車部材103は、作用部105が設けられた側の端部に第1カウンターウェイト145が設けられ、反対側の端部に第1バランサー146が取り付けられている。当該第1カウンターウェイト145と、第1バランサー146については、後で詳述する。≪Balancer attached to
In this embodiment, the
≪クランク部材104≫
次に、このクランク装置におけるクランク部材を説明する。
クランク部材104は、図4及び図7に示すように、内周太陽歯車102の中心線と同軸に回転するようにクランクケース101に配設されている。そして、クランク部材104は、遊星歯車部材103を自転および公転可能に支持している。
Next, the crank member in this crank apparatus will be described.
As shown in FIGS. 4 and 7, the
この実施形態では、クランク部材104は、図8Aに示すように、片側が太く、反対側が細い軸部材である。片側の太い軸部151には、図8A、図8B及び図9に示すように、上述した遊星歯車部材103を装着する装着穴152が、当該片側の端面から軸方向に形成されている。当該装着穴152の中心線c2は、図7に示すように、クランク部材104の回転軸c1から遊星歯車131のピッチ円103cの半径r1の距離だけずれており、遊星歯車131のピッチ円103cの中心線c2に一致している。また、図8A及び図9に示すように、このクランク部材104の中間部153は当該太い軸部151よりも少し細く形成されている。当該中間部153において、太い軸部151に形成された装着穴152の底部は、図中の符号152aで示すように、クランク部材104の側面に開口している。
In this embodiment, as shown in FIG. 8A, the
≪動力伝達、プーリ159≫
この実施形態では、クランク部材104の当該中間部153から伸びる軸部154には、キー溝156が切られ、キー157を介してボス158が装着されている。当該ボス158のフランジには、図4および図8に示すように、動力源としてのモータ200からタイミングベルト201が掛けまわされるプーリ159が取り付けられている。≪Power transmission,
In this embodiment, a
≪クランク部材104に取り付けられたバランサー≫
また、この実施形態では、クランク部材104は、図8に示すように、前記片側の端部に第2カウンターウェイト161が設けられ、反対側の端部に第2バランサー162が取り付けられている。この実施形態では、第2バランサー162は、上述したプーリ159に取り付けられている。当該第2カウンターウェイト161と、第2バランサー162については、後で詳述する。≪Balancer attached to crank
In this embodiment, as shown in FIG. 8, the
≪遊星歯車部材103とクランク部材104の取り付け構造≫
この実施形態では、図4及び図9に示すように、遊星歯車部材103は、軸受181、182を介在させてクランク部材104の装着穴152に回動自在に装着されている。遊星歯車部材103は、第1カウンターウェイト145および作用部105が、クランク部材104の装着穴152から外に出た状態で、装着穴152に装着されている。また、遊星軸132は、図4および図9に示すように、クランク部材104の装着穴152の底部に形成された開口152aに到達している。当該遊星軸132の端部に取り付けられた遊星歯車131の歯面は、クランク部材104の装着穴152の底部に形成された開口152aからクランク部材104の外に露出している。<< Attachment structure of
In this embodiment, as shown in FIGS. 4 and 9, the
≪クランクケース101への取り付け構造≫
遊星歯車部材103とクランク部材104のアッセンブリは、図4に示すように、クランクケース101に装着されている。クランク部材104は、軸受183、184を介在させて、クランクケース101に回動自在に装着されている。クランク部材104は、クランクケース101に固定された内周太陽歯車102のピッチ円102cの中心線c1と同軸で回転するように装着されている。遊星歯車131は、クランク部材104の装着穴152の底部に形成された開口152aから露出しており、内周太陽歯車102に噛み合う。また、クランク部材104の軸部154が挿通される挿通穴113には、軸受184と、プーリ159を取り付けるボス158との間にスペーサ185と、シール186が装着されている。≪Mounting structure to crankcase 101≫
The assembly of the
≪作用部105の軌道≫
上述したように遊星歯車部材103は、内周太陽歯車102との噛み合い、クランク部材104の回転に応じて、自転及び公転する。クランク部材104の軸方向から平面的に観察すると、この駆動機構100は、図7に示すように、遊星歯車部材103のピッチ円103cの半径r1と、内周太陽歯車102のピッチ円102cの半径r2との比は、r1:r2=1:2の関係になっている。また、作用部105は、遊星歯車部材103の回転中心軸c2から径方向にピッチ円103cの半径r1よりも短い距離r3だけずれている。≪Track of
As described above, the
この駆動機構100によれば、遊星歯車部材103は、クランク部材104の装着穴152によって、自転及び公転可能に支持されている。クランク部材104が回転すると、遊星歯車部材103は内周太陽歯車102と噛合しながら自転および公転する。遊星歯車部材103は、1回公転する毎に2回自転する。この際、作用部105は楕円軌道Aを描く。なお、楕円軌道Aの形状は、作用部105を設ける位置によって変わる。所望の楕円軌道Aが得られるように、作用部105の位置を設定するとよい。
According to the
≪ノズル支持体600の取付構造≫
この実施形態では、図5に示すように、ケーシング700の中央部にノズル501〜503が旋回するノズル旋回空間710が在り、当該ノズル旋回空間710の両側に形成された開口715,716にそれぞれ駆動機構100が取り付けられている。また、この巻線機1000では、2つの駆動機構100のプーリ159と、モータ200のプーリ210とにタイミングベルト201を掛けまわし、駆動機構100の作用部105が旋回するタイミングが調整されている。これにより2つの駆動機構100の作用部105は、図3に示すように、それぞれ同期して縦長の楕円軌道Aを描く。略ひし形のプレート部材で構成されたノズル支持体600は、図3に示すように、両側部620、630(この実施形態では、ひし形の両側の頂点部分)が、駆動機構100の作用部105にそれぞれ軸受640(図4参照)を介して連結されている。<< Mounting structure of
In this embodiment, as shown in FIG. 5, there is a
≪ノズル支持体600、ノズル501〜503の軌道≫
ノズル支持体600は、上述した駆動機構100の作用部105に支持されて、上下方向に縦長の楕円軌道Aに沿って旋回する。この巻線機1000では、線材を繰出すノズル501〜503は、図3および図10〜図12に示すように、ノズル支持体600に支持されており、ノズル支持体600の旋回に伴って、楕円軌道Aで回動する。<< Track of
The
ノズル支持体600と駆動機構100の作用部105との連結構造は、この実施形態では、作用部105に軸受640を介在させて、ノズル支持体600を取り付けている。また、この実施形態では、ノズル支持体600の離れた2箇所の位置(両側部620、630)が異なる駆動機構100の作用部105に連結されている。
駆動機構100は、タイミングベルト201によって、タイミングが調整されており、駆動機構100の作用部105は、図3および図10から図12に示すように、それぞれ同期して同じ縦長の楕円軌道Aを描く。この際、駆動機構100内の内周太陽歯車102と遊星歯車131とに生じるバックラッシュや、駆動機構100のプーリ159とタイミングベルト201とのバックラッシュや、各部材の加工精度や、各部材の組付精度などによって、異なる駆動機構100の作用部105の楕円軌道Aが微妙にずれることもある。In this embodiment, the connection structure between the
The timing of the
この実施形態では、ノズル支持体600と駆動機構100の作用部105との連結箇所は、1箇所はノズル支持体600に対する駆動機構100の作用部105の位置が変わらず、他はノズル支持体600に対する駆動機構100の作用部105の位置が変位可能な構造を備えている。すなわち、この実施形態では、図3に示す右側の駆動機構100の作用部105をノズル支持体600に連結する部位において、ノズル支持体600に軸受640を取り付ける穴721(図4参照)を微妙に長穴とし、ノズル支持体600に対して、軸受640が少し動けるようにしている。これによって、異なる駆動機構100の作用部105の楕円軌道Aが相対的に微妙にずれるのに応じて、ノズル支持体600に対して当該軸受640が動き、当該ずれを吸収する。これによって、ノズル支持体600の動作を滑らかにしている。
In this embodiment, the position of the
なお、この実施形態では、ノズル支持体600の離れた2箇所の位置が、同じ楕円軌道で同期して旋回する駆動機構100の作用部105にそれぞれ連結されている。図示は省略するが、駆動機構100の作用部105に掛かる負荷を軽減するため、ノズル支持体600の2箇所以上の位置を、同じ楕円軌道で同期して旋回する駆動機構100の作用部105に連結することも可能である。この場合、駆動機構100の作用部105に連結されたノズル支持体600の位置のうち1箇所は、ノズル支持体600に対する駆動機構100の作用部105の位置が変わらず、他はノズル支持体600に対する駆動機構100の作用部105の位置が変位可能であるように構成するとよい。これによって、異なる駆動機構100の作用部105の楕円軌道Aが相対的に微妙にずれを許容することができ、ノズル支持体600の動作を滑らかにできる。
Note that, in this embodiment, the two distant positions of the
ノズル支持体600に対する駆動機構100の作用部105の位置を変位可能にする構成は、上述した実施形態に限定されない。
The configuration that allows the position of the
≪巻線機1000の作用≫
従来技術として挙げた特許文献1では、大きなアームの揺動を伴うものであり、特許文献2では、X方向、Y方向へのガイドを組み合わせた構造である。これらの構造上、慣性力が大きく作用するためノズル支持体を速く回転させることに向いておらず、このため、線材をステータコアに捲回する工程に係る時間を短縮することが難しい。
これに対して、上述した巻線機1000は、図4および図7に示すように、ノズル支持体600は、駆動機構100の作用部105に連結されて楕円軌道Aで旋回する。この巻線機1000によれば、駆動機構100は、クランク部材104によって支持された遊星歯車131を、内周太陽歯車102に噛み合わせつつ遊星歯車部材103を自転および公転させることによって、作用部105を楕円軌道Aでスムーズに駆動させることができる。クランク部材104の回転運動、および、遊星歯車部材103の自転および公転は、一連の連続運動であり、上述した特許文献1、特許文献2の構造に比べて、慣性力による損失が少なく、効率よく駆動させることができる。このため、従来技術として挙げた特許文献1、2に比べて、ノズル支持体600の旋回速度を格段に速くすることができる。≪Operation of winding
On the other hand, in the winding
この実施形態では、図3に示すように、ノズル支持体600の離れた少なくとも2箇所の位置(この実施形態では、両側部620、630(ひし形のノズル支持体600の両側の頂点部分))が、同じ楕円軌道で同期して旋回する駆動機構100の作用部105にそれぞれ連結されている。このため、ノズル支持体600の旋回を安定させることができる。
In this embodiment, as shown in FIG. 3, at least two positions (in this embodiment, both
また、この実施形態では、図7に示すように、作用部105は、遊星歯車131のピッチ円103cの内側にずらして配設されている。このため、作用部105の楕円軌道Aに対して、内周太陽歯車102と遊星歯車131のピッチ円102c、103cを大きくすることができ、内周太陽歯車102と遊星歯車131により大きな歯車を採用することができる。これによって、内周太陽歯車102と遊星歯車131が駆動の際に許容できる反力も大きくなり、ノズル支持体600(図3参照)をより安定させて旋回させることができる。
Further, in this embodiment, as shown in FIG. 7, the
ノズル支持体600に支持されたノズル501〜503は、図3に示すように、楕円軌道Aで駆動する。楕円軌道Aで駆動するノズル501〜503から供給される線材510は、図4に示すように、捲回部Pにおいて、ステータコア(図示省略)のティース部に巻かれる。図示は省略するが、捲回部Pは、楕円軌道Aで駆動するノズル501〜503の動きに応じて、ステータコアを前後させ、ティース部に巻かれる線材の位置を調整できる機構を備えている。これによって、ティース部に巻かれる線材の密度を高くすることができ、モータの性能を向上させることができる。
The
また、この実施形態では、遊星歯車部材103は、図4及び図6に示すように、作用部105が設けられた側の端部に第1カウンターウェイト145が設けられ、反対側の端部に第1バランサー146が取り付けられている。また、クランク部材104は、図4および図8に示すように、片側の端部に第2カウンターウェイト161が設けられ、反対側の端部に第2バランサー162が取り付けられている。
In this embodiment, as shown in FIGS. 4 and 6, the
≪バランサー≫
この実施形態では、第1バランサー146によって、遊星歯車部材103に作用する遠心力が釣り合い、かつ、遊星歯車部材103の回転軸c2上の任意の位置で遊星歯車部材103に作用する遠心力のモーメントが釣り合っている。また、第2バランサー162によって、クランク部材104に作用する遠心力が釣り合い、かつ、クランク部材104の回転軸c1上の任意の位置でクランク部材104に作用する遠心力のモーメントが釣り合っている。このため、この巻線機1000は、駆動機構100に生じる振動を低減することができ、ノズル支持体600の旋回速度を一段と速くすることができる。
以下、かかる第1バランサー146と第2バランサー162の作用を説明する。≪Balancer≫
In this embodiment, the centrifugal force acting on the
Hereinafter, the operation of the
≪遊星歯車部材103のバランス≫
すなわち、この実施形態では、遊星歯車部材103は、図6A及び図6Bに示すように、遊星歯車131と遊星軸132で構成されており、遊星軸132の一端に設けられる作用部105にはノズル支持体600が取り付けられる。この遊星歯車部材103は、図13に示すように、モデル化できる。図13中、c2は遊星歯車部材103の回転軸を、M1は作用部105に連結されるノズル支持体600に相当する質量体を、M2は第1カウンターウェイト145に相当する質量体を、M3は第1バランサー146に相当する質量体をそれぞれ示している。≪Balance of
That is, in this embodiment, the
図13に示すモデルにおいて、遊星歯車部材103が回転した場合に、質量体M1(動作部材)に作用する遠心力をF1、質量体M2(第1カウンターウェイト145)に作用する遠心力をF2、質量体M3(第1バランサー146)に作用する遠心力をF3とする。この遊星歯車部材103は、遠心力F1と、遠心力F2と、遠心力F3を釣り合わせている(F1+F2+F3=0(F1、F2、F3はベクトル量))。
In the model shown in FIG. 13, when the
この場合、F1、F2、F3はそれぞれ「遠心力=質量×半径×(角速度)2」の式で算出することができ、遠心力F1、F2、F3の方向は回転軸c2に対して径方向外向きに作用する。(角速度)2は、各項に共通しているので除することができ、F1、F2、F3の各項の大きさは、質量×半径に置き換えることができる。さらに、この実施形態では、図6A及び図6Bに示すように、遊星歯車部材103の回転軸c2の軸周りにおいて、ノズル支持体600が取り付けられる作用部105と第1バランサー146とは、第1カウンターウェイト145に対して周方向において180°ずらして配設されている。このため、質量体M1(動作部材)に作用する遠心力F1と質量体M3(第1バランサー146)に作用する遠心力F3は、質量体M2(第1カウンターウェイト145)に作用する遠心力F2に対して常に方向が反対になる。従って、この実施形態では、質量体M1(動作部材)の質量をm1、半径距離をA1とし、質量体M2(第1カウンターウェイト145)の質量をm2、半径距離をA2とし、質量体M3(第1バランサー146)の質量をm3、半径距離をA3とした場合に、F1+F2+F3=0(F1、F2、F3はベクトル量)は、(m1×A1+m3×A3)−(m2×A2)=0となる。このように、遊星歯車部材103は、作用部105にノズル支持体600が取り付けられた状態で回転した場合に、遊星歯車部材103に作用する遠心力が釣り合っている。In this case, F1, F2, and F3 can each be calculated by the formula “centrifugal force = mass × radius × (angular velocity) 2 ”, and the directions of the centrifugal forces F1, F2, and F3 are radial with respect to the rotation axis c2. Acts outward. (Angular velocity) 2 can be removed because it is common to each term, and the size of each term of F1, F2, and F3 can be replaced by mass × radius. Further, in this embodiment, as shown in FIGS. 6A and 6B, the
さらに、この実施形態では、遊星歯車部材103の回転軸c2上の任意の位置で、遊星歯車部材103に作用する遠心力(F1、F2、F3)のモーメントが釣り合っている。
Furthermore, in this embodiment, the moment of the centrifugal force (F1, F2, F3) acting on the
すなわち、図13に示すように、遊星歯車部材103の回転軸c2上の任意の位置O1から各遠心力F1、F2、F3が作用する位置までの軸方向の距離をそれぞれL1、L2、L3とする。この遊星歯車部材103は、F1×L1+F2×L2+F3×L3=0(F1、F2、F3はベクトル量)になっている。これにより、遊星歯車部材103が回転した場合に、当該回転軸c2上の任意の位置において回転軸c2に直交する軸回りに、遊星歯車部材103を回転させるように作用する力を小さく抑えることができる。
That is, as shown in FIG. 13, the axial distances from the arbitrary position O1 on the rotation axis c2 of the
この実施形態では、遊星歯車部材103は、第1バランサー146の重さを調整することによって、F1+F2+F3=0(F1、F2、F3はベクトル量)、及び、F1×L1+F2×L2+F3×L3=0(F1、F2、F3はベクトル量)にしている。なお、実際には、各部材については、重さや取り付け位置について製造上の公差が生じる。第1バランサー146の重さを調整する際は、作用部105に、ノズル支持体600に相当するダミーウエイトを配設し、クランク部材104に支持された状態と同様の状態で、遊星歯車部材103を回転自在に支持する。そして、遊星軸132をモータ等で回転させて、遊星歯車部材103に生じる振動が低減されるように、第1バランサー146の重さや取り付け位置を微調整するとよい。
In this embodiment, the
また、第1バランサー146は、遊星歯車部材103の軸方向端部に取り付けられているとよい。この実施形態では、第1バランサー146は、作用部105や第1カウンターウェイト145を取り付ける位置から軸方向に離れた、遊星歯車部材103の軸方向の端部に取り付けられている。この場合、作用部105や第1カウンターウェイト145の近傍位置では、第1バランサー146によって遊星歯車部材103に作用する遠心力のモーメントが大きい。このため、遊星歯車部材103の回転軸c2から同一半径距離に、第1バランサー146を遊星歯車部材103に取り付ける場合、遊星歯車部材103の他の位置に比べて、第1バランサー146を軽くできる。このように、遊星歯車部材103の軸端部に第1バランサー146を取り付けることによって、第1バランサー146を軽くできるから、駆動機構100の全体を軽くすることができる。
Further, the
遊星歯車部材103が回転した場合に、遊星歯車部材103に作用する遠心力が釣り合い、かつ、遊星歯車部材103の回転軸上の任意の位置に作用する遠心力のモーメントが釣り合うように調整された一例を図13に示すモデルで示す。例えば、図13に示すモデルにおいて、質量体M1、質量体M2、質量体M3は、それぞれ回転軸c2から重心までの半径距離(A1、A2、A3)が同じである。そして、質量体M2が回転軸c2に取り付けられた位置から質量体M1は左側へS、質量体M3は右側へ2Sの距離にそれぞれ配設されている。この場合、質量体M1が2g、質量体M2が3g、質量体M3が1gである場合に、遊星歯車部材103に作用する遠心力F1、F2、F3が釣り合い、かつ、遊星歯車部材103の回転軸c2上の任意の位置に作用する遠心力F1、F2、F3のモーメントが釣り合う。なお、遊星歯車部材103に作用する遠心力が釣り合い、かつ、遊星歯車部材103の回転軸c2上の任意の位置に作用する遠心力のモーメントが釣り合う例は、この例に限定されない。
When the
≪クランク部材104のバランス≫
このクランク部材104は、クランク部材104に作用する遠心力が釣り合い、かつ、クランク部材104の回転軸c1上の任意の位置に作用する遠心力のモーメントが釣り合う。この駆動機構100は、図14に示すように、モデル化できる。図14中、c1はクランク部材104の回転軸を、M11は遊星歯車部材103に相当する質量体を、M12は第2カウンターウェイト161に相当する質量体を、M13は第2バランサー162に相当する質量体をそれぞれ示している。<< Balance of
The
図14に示すモデルにおいて、クランク部材104が回転した場合に、質量体M11(遊星歯車103)に作用する遠心力をF11、質量体M12(第2カウンターウェイト161)に作用する遠心力をF12、質量体M13(第2バランサー162)に作用する遠心力をF13とする。このクランク部材104は、遠心力F11と、遠心力F12と、遠心力F13を釣り合わせている(F11+F12+F13=0(F11、F12、F13はベクトル量))。
In the model shown in FIG. 14, when the
さらに、この実施形態では、クランク部材104の回転軸c1上の任意の位置で、クランク部材104に作用する遠心力(F11、F12、F13)のモーメントが釣り合っている。
Further, in this embodiment, the moment of the centrifugal force (F11, F12, F13) acting on the
すなわち、図14に示すように、クランク部材104の回転軸c1上の任意の位置O2から各遠心力F11、F12、F13が作用する位置までの軸方向の距離をそれぞれL11、L12、L13とする。このクランク部材104は、F11×L11+F12×L12+F13×L13=0(F11、F12、F13はベクトル量)になっている。これにより、クランク部材104が回転した場合に、当該回転軸c1上の任意の位置において回転軸c1に直交する軸回りに、クランク部材104を回転させるように作用する力を小さく抑えることができる。
That is, as shown in FIG. 14, the axial distances from the arbitrary position O2 on the rotation axis c1 of the
この実施形態では、クランク部材104は、第2バランサー162の重さを調整することによって、F11+F12+F13=0(F11、F12、F13はベクトル量)、及び、F11×L11+F12×L12+F13×L13=0(F11、F12、F13はベクトル量)にしている。なお、実際には、各部材については、重さや取り付け位置について製造上の公差が生じる。第2バランサー162の重さを調整する際は、クランク部材104に遊星歯車部材103に相当するダミーウエイトを配設し、クランクケース101に支持された状態と同様の状態で、クランク部材104を回転自在に支持する。そして、クランク部材104をモータ等で回転させて、クランク部材104に生じる振動が低減されるように、第2バランサー162の重さや取り付け位置を微調整するとよい。
In this embodiment, the
また、この実施形態では、第2バランサー162は、プーリ159に取り付けられている。このプーリ159は、クランク部材104の回転軸c1から離れているので、第2バランサー162の重さを軽くしても作用する遠心力が大きくなる。このため、より軽い第2バランサー162によって、クランク部材104に作用する遠心力が釣り合い、かつ、クランク部材104の回転軸c1上の任意の位置に作用する遠心力のモーメントを釣り合わせることができる。
In this embodiment, the
上述したように、この駆動機構100は、クランク部材104が回転すると、遊星歯車部材103は自転及び公転する。かかる駆動機構100では、振動を完全に抑えることは極めて難しい。しかしながら、この駆動機構100は、上述したように遊星歯車部材103に作用する遠心力、および、遊星歯車部材103の回転軸c2上の任意の位置に作用する遠心力のモーメントが釣り合っている(釣り合うように調整されている)。さらに、クランク部材104に作用する遠心力、及び、クランク部材104の回転軸c1上の任意の位置に作用する遠心力のモーメントが釣り合っている(釣り合うように調整されている)。このため、遊星歯車部材103の回転軸c2およびクランク部材104の回転軸c1に偏った荷重が作用するのを小さく抑えることができる。これにより、遊星歯車部材103の自転および公転に伴って駆動機構100に生じる振動を極めて小さくすることができる。これによって、ノズル支持体600の旋回速度を格段に速くすることができる。
As described above, in the
なお、第1バランサー146や第2バランサー162は、それぞれ重さが異なるものに交換可能に取り付けられているとよい。また、第1バランサー146や第2バランサー162は、取付位置を変更可能に取り付けられているとよい。これによって、第1バランサー146と第2バランサー162の重さや取り付け位置を微調整することが可能になる。例えば、第1バランサー146は、遊星歯車部材103の回転軸c2に対して径方向や軸方向に取り付け位置が変更できるようにしてもよい。これによって、遊星歯車部材103に作用する遠心力を釣り合わせ、かつ、遊星歯車部材103の回転軸c2上の任意の位置に作用する遠心力のモーメントを釣り合わせる調整が容易になる。また、第2バランサー162は、クランク部材104の回転軸c1に対して径方向や軸方向に取り付け位置が変更できるようにしてもよい。これによって、クランク部材104に作用する遠心力を釣り合わせ、かつ、クランク部材104の回転軸上の任意の位置に作用する遠心力のモーメントを釣り合わせる調整が容易になる。
In addition, the
≪ケーシング700≫
次にケーシング700を説明する。
ケーシング700は、図3及び図4に示すように、ノズル支持体600を収容する部材である。この巻線機1000は、上述したようにノズル支持体600が旋回するが、ノズル支持体600がケーシング700で覆われているので、安全性を確保することができる。また、ノズル支持体600を支持する駆動機構100に外から異物が進入するのを防止できる。<<
Next, the
As shown in FIGS. 3 and 4, the
≪ケーシング700の構造≫
この実施形態では、ケーシング700は、図4に示すように、クランク部材104の軸線方向の前後に分離可能な2つのケース体701、702を嵌め合わせた構造を備えている。ケーシング700内には、ノズル支持体600が旋回する矩形の空間712が形成されている。図3は、ケース体701(蓋)を取り外した状態を示している。図4は、巻線機の縦断側面図であり、図3中のIV−IV断面矢視図である。<< Structure of
In this embodiment, as shown in FIG. 4, the
この実施形態では、図3及び図4に示すように、ケーシング700の中央部にノズル支持体600に支持されたノズル501〜503が旋回するノズル旋回空間710を有している。この実施形態では、ケーシング700は、ノズル旋回空間710を形成する当該筒状の仕切り711を有している。図4に示すように、ノズル支持体600は、仕切り711に形成されたスリット状の隙間720に装着されている。当該スリット状の隙間720にはシール730が配設されている。
In this embodiment, as shown in FIGS. 3 and 4, a
この実施形態では、図4に示すように、ケース体701は、中央部に、ノズル旋回空間710を形成する円形の穴が形成されており、その周縁部にケーシング700内に突出した第1の仕切り711aが設けられている。ケース体702は、中央部に、ノズル旋回空間710を形成する円形の穴が形成されており、その周縁部にケーシング700内に突出した第2の仕切り711bが設けられている。ケース体701側の第1の仕切り711aの端面と、ケース体702側の第2の仕切り711bの端面とが対向しており、当該第1の仕切り711aの端面と、第2の仕切り711bの端面との間にスリット状の隙間720が形成されている。ノズル支持体600は、プレート状の部材であり、当該スリット状の隙間720に装着されている。
In this embodiment, as shown in FIG. 4, the
また、この実施形態では、図3に示すように、筒状のノズル旋回空間710を仕切る仕切り711を挟んで両側に駆動機構100が装着されている。具体的には、ケース体702に仕切り711bを挟んで両側に開口715、716が形成されている。当該開口715、716に駆動機構100が装着されている。駆動機構100は、作用部105をケーシング700内に向けて、クランクケース101を開口715、716に装着している。左右の駆動機構100は、タイミングベルト201で同期しており、左右の駆動機構100の作用部105は、それぞれ同期して同様の楕円軌道Aで旋回する。ノズル支持体600は、当該駆動機構100の作用部105にそれぞれ連結されている。
In this embodiment, as shown in FIG. 3, the
この実施形態では、ケーシング700は、ノズル支持体600が旋回する支持体旋回空間712の気密性が確保されており、当該空間712は潤滑オイルが供給されている。この実施形態では、かかる潤滑オイルがノズル旋回空間710に漏れないように、当該スリット状の隙間720にシール730が配設されている。
In this embodiment, the
すなわち、この実施形態では、ケーシング700は、ノズル支持体600に支持されたノズル501〜503が旋回するノズル旋回空間710と、ノズル支持体600が旋回する支持体旋回空間712とを有している。そして、ノズル旋回空間710と支持体旋回空間712とを仕切るシール730とを備えている。かかるシール730によって支持体旋回空間712内の潤滑オイルがノズル旋回空間710に漏れるのを防止できる。これにより、ノズル旋回空間710を挿通する線材がオイルで汚れるのを抑制できる。
That is, in this embodiment, the
≪シール730の構造≫
以下、この実施形態における、シール730の構造を説明する。
この実施形態では、シール730は、図15に示すように、スリット状の隙間720の端面に内外に2重のシールが構成されている。外側に配設された第1シール731は、スリット状の隙間720の端面に形成された装着溝722に装着され、ノズル支持体600の表面に接触する。内側に配設された第2シール732は、弾性体としてのばね742の作用によってノズル支持体600の表面に強制的に押し当てられる。また、この実施形態では、第2シール732は内側から外側に向かうにつれて徐々にノズル支持体600の表面に向けて突出したテーパ形状を有している。<< Structure of
Hereinafter, the structure of the
In this embodiment, as shown in FIG. 15, the
また、この実施形態では、筒状の挿通空間の径方向において第2シールよりも外側に向かうドレン通路を有する。当該ドレン通路は、第1シール731の一部に溝を設けて形成してもよいし、第2シール732を装着する装着溝に、ドレン穴を形成してもよい。
Moreover, in this embodiment, it has a drain channel | path toward the outer side rather than a 2nd seal in the radial direction of a cylindrical insertion space. The drain passage may be formed by providing a groove in a part of the
この場合、シールは二重に構成されており、外側に配設された第1シール731によって、支持体旋回空間712中のオイル成分を概ね遮断することができる。さらに第1シール731を乗り越えたオイル成分についても、ノズル支持体600の表面に強制的に押し当てられる第2シール732によって遮断することができる。
In this case, the seal is doubled, and the oil component in the support
さらに、第2シール732は、ノズル支持体600に対向する面が内側から外側に向かうにつれて、徐々にノズル支持体600に近づくように突出したテーパ形状を有している。第2シール732は、旋回するノズル支持体600の表面に、外側の頂部が確実に押し当たる。かかる第2シール732によってオイル成分をより確実に遮断することができる。
Further, the
次に、他の実施形態に係る巻線機1000Aを示す。
この巻線機1000Aは、図16及び図17に示すように、主にケーシング700Aの構造が異なっている。また、潤滑オイルを供給する経路の一例についてもこの実施形態に基づいて説明する。Next, a winding
As shown in FIGS. 16 and 17, the winding
このケーシング700Aは、図17に示すように、第1ケース体701A(蓋)と、第2ケース体702Aで構成されている。第1ケース体701Aと第2ケース体702Aは、図18と図19に示すように、矩形の鋼板であり、それぞれ中央部にノズル501〜503が旋回するノズル旋回空間710を形成する穴771a、771bが形成されている。
As shown in FIG. 17, the
図18及び図19に示すように、第1ケース体701Aと第2ケース体702Aは、それぞれ当該穴771a、771bの周囲にシール730が配設されている。シール730の外側には、旋回するノズル支持体600を滑り支承する滑り支持部780が設けられている。また、第2ケース体702Aは、図17および図19に示すように、ノズル支持体600が旋回する支持体旋回空間712及び駆動機構100が装着される領域を囲むように窪み790(図19参照)が形成されている。そして、当該窪み790の周りにガスケット810が装着されている。また、駆動機構100は、ノズル旋回空間710の両側に配設されている。この実施形態では、第2ケース体702Aには、滑り支持部780の外側に、駆動機構100を装着する開口715、716が形成されている。また、第1ケース体701Aには、駆動機構100の作用部105が旋回する領域に窪み791、792が形成されている。
As shown in FIGS. 18 and 19, the
このケーシング700Aは、図16に示すように、上述した第2ケース体702Aに形成された開口715、716にそれぞれ駆動機構100が装着されている。駆動機構100は、図17に示すように、作用部105を、当該開口715、716から第1ケース体701Aと第2ケース体702Aの間に形成される空間に向け、クランクケース101を当該開口715、716に装着している。2つの駆動機構100は、作用部105が同様の楕円軌道Aで同期して旋回するようにタイミングベルト201が装着されている。
As shown in FIG. 16, the
ノズル支持体600は、略ひし形のプレート状の部材であり、支持体旋回空間712を形成する第2ケース体702Aの窪みに装着されている。上述した2つの駆動機構100の作用部105は、当該ノズル支持体600の離れた2箇所の位置に連結されている。
The
ケーシング700Aは、図16に示すように、第2ケース体702Aに駆動機構100及びノズル支持体600が取り付けられた状態で、図17に示すように、第1ケース体701A(蓋)が取り付けられる。第2ケース体702Aに装着されたガスケット810は、図17に示すように、第1ケース体701Aに押し当てられる。当該ガスケット810によって、支持体旋回空間712の気密性が確保されている。
As shown in FIG. 16, the
次に、ノズル旋回空間710の周りに構築されるシール730について説明する。
Next, the
この実施形態では、図20に示すように、第1ケース体701Aと第2ケース体702Aに、ノズル旋回空間710を形成する穴771aと771bの周りにシール材773を装着する溝772が形成されている。シール材773は、環状のシール材であり、内周側面にはOリング775が装着されている。さらに、この実施形態では、シール材773と溝772の底部との間に、弾性部材としてのばね774が圧縮された状態で配設されており、当該ばね774によってシール材773がノズル支持体600の表面に押し当てられている。なお、ここで、弾性部材としてのばね774は、コイルスプリングを図示しているが、環状のシール材773をノズル支持体600の表面に確実に押し当てる機能を奏すればよく、コイルスプリングに限らず、例えば、種々のスプリングワッシャーを装着してもよい。
In this embodiment, as shown in FIG. 20, the
また、環状のシール材773は、ノズル支持体600に対向する面773aが、環状のシール材773の径方向内側から外側に向かうにつれて、徐々にノズル支持体600に近づくように突出したテーパ形状を有している。
Further, the
また、この実施形態では、ケーシング700Aは、ノズル支持体600の旋回を支持する滑り支持部780を備えている。この実施形態では、上述したスリット状の隙間720の両側に、縦長の溝781が形成されており、当該溝781に滑り材782が装着されている。
In this embodiment, the
このように、この実施形態では、シール730によって、ノズル旋回空間710と支持体旋回空間712とが仕切られている。かかるシール730によって、ノズル旋回空間710に潤滑オイルが漏れるのが防止されている。また、この実施形態では、シール730はノズル旋回空間710を囲むように配設され、ノズル支持体600の表面に押し当てられた環状のシール材773を備えている。そして、環状のシール材773は、図21に示すように、ノズル支持体600に対向する面773aが内側から外側に向かうにつれて、徐々にノズル支持体600に近づくように突出したテーパ形状を有している。このため、シール材773のテーパ形状の頂部が、旋回するノズル支持体600の表面に当接し、ノズル支持体600の表面に付着した潤滑オイルを削ぐように除去することができる。これにより、ノズル旋回空間710に潤滑オイルが漏れるのを抑止できる。また、ケーシング700Aは、ノズル支持体600の旋回を支持する滑り支持部780を備えている。このため、ノズル支持体600のばたつきを抑えることができる。
Thus, in this embodiment, the
特に、この実施形態では、滑り支持部780は、ノズル旋回空間710を仕切るシール730の周りに形成されている。プレート状のノズル支持体600は、ノズル旋回空間710を仕切るシール730間に形成されたスリット状の隙間720に装着されている。滑り支持部780は、当該シール730の周りに形成され、当該シール730の周りでノズル支持体600の平坦度を確保している。これによって、ノズル支持体600を適切に当該スリット状の隙間720へ装着することができるともに、ノズル支持体600が旋回する際も、ばたつきや引っ掛かることなく、スムーズに旋回することができる。
In particular, in this embodiment, the sliding
この実施形態では、ノズル支持体600には、アルミ合金からなる鋼板が用いられており、表面には硬質アルマイト処理が施されている。なお、ノズル支持体600は、旋回させるため、軽量であることが望ましい。この実施形態では、アルミ合金からなる鋼板を用いているが、これに限らず、所用の強度を備えた種々の板材を用いることができ、例えば、カーボン製の板材を用いることができる。
また、この実施形態では、シール材773及び滑り材782には、例えば、燐青銅系の合金材料を用いている。かかる合金は、かかるノズル支持体600の表面に対して滑りがよく、かつ、ノズル支持体600の表面に付着した油を削ぎ落とすのに適した所用の硬度を有している。なお、シール材773及び滑り材782に用いられる材料は、燐青銅系の合金材料に限らない。滑り材782には、ノズル支持体600の表面に対して滑りがよい材料を用いるとよい。また、シール材773には、ノズル支持体600の表面に対して滑りがよく、かつ、ノズル支持体600の表面に付着した油を削ぐのに適した所用の硬度を有している種々の材料を用いることができる。In this embodiment, a steel plate made of an aluminum alloy is used for the
In this embodiment, for example, a phosphor bronze alloy material is used for the sealing
シール材773及び滑り材782には、例えば、鋳鉄材、鋼材を用いることができる。また、潤滑オイルの使用を少なくするべく、鋳鉄材、鋼材などの母材にポリテトラフルオロエチレンなどのフッ素樹脂系の材料で表面処理を行ってもよい。さらにポリテトラフルオロエチレンなどのフッ素樹脂系の材料にグラファイトなどを練り込んだ材料を用いても良い。また、ノズル支持体600の表面にも、少なくともシール材773や滑り材782との間に滑りが生じる部位に、ポリテトラフルオロエチレンなどのフッ素樹脂系の材料で表面処理を行ってもよい。
For the sealing
次に、潤滑オイルを供給する経路を説明する。この実施形態では、潤滑オイルは、図17に示すように、駆動機構100のクランクケース101に形成されたオイル供給穴820から供給される。そして、供給された潤滑オイルは、駆動機構100内の部材間の隙間192や軸受181、183を通してケーシング700A内の支持体旋回空間712に潤滑オイルが供給される。この実施形態では、潤滑オイルは、駆動機構100内については、例えば、クランクケース101の内側面と、クランク部材104の外側面の間の隙間192や、遊星歯車部材103とクランク部材104の間の隙間などを通して、内周太陽歯車102と遊星歯車131が噛み合う部分にも供給されている。
なお、この実施形態では、図17に示すように、駆動機構100は、クランク部材104に遊星歯車部材103を装着する軸受181と軸受182の間にスペーサ190が装着されている。当該スペーサ190にも油路が形成されている。Next, a route for supplying lubricating oil will be described. In this embodiment, the lubricating oil is supplied from an
In this embodiment, as shown in FIG. 17, in the
そして、ケーシング700A内の支持体旋回空間712に供給された潤滑オイルは、駆動機構100の旋回やノズル支持体600の旋回によって、支持体旋回空間712内にオイル雰囲気を形成する。かかるオイル雰囲気によって、ケーシング700Aの支持体旋回空間712内の各部材の表面に潤滑オイルが付着する。また、ケーシング700A内に供給された潤滑オイルは、図16及び図17に示すように、第2ケース体702Aの支持体旋回空間712の下部に形成された排出穴830から排出される。
The lubricating oil supplied to the support
図示は省略するが、排出穴830から排出された潤滑オイルを回収して、再び駆動機構100に供給する循環装置を設けても良い。
Although illustration is omitted, a circulation device that collects the lubricating oil discharged from the
以上、本発明の一実施形態に係る巻線機1000を説明したが、本発明に係る巻線機1000は、上述した実施形態に限定されない。
As mentioned above, although the winding
また、上述した内周太陽歯車102、遊星歯車部材103、クランクケース101、クランク部材104などの具体的な形状や構造は、種々の変更が可能である。
The specific shapes and structures of the
例えば、上述した実施形態では、図3に示すように、ノズル支持体600は、両側部620、630(ひし形のノズル支持体600の両側の頂点部分))が、駆動機構100の作用部105にそれぞれ連結されている。本発明は、必ずしもかかる形態に限らない。図示は省略するが、ノズル支持体600の旋回を案内するガイドを設けてもよい。また、ノズル支持体600を駆動機構100の作用部105に連結する位置は3箇所にしてもよい。また、ノズル支持体600を駆動機構100の作用部105に連結する位置は、1箇所にし、他の位置にガイドを設けても良い。
For example, in the above-described embodiment, as shown in FIG. 3, the
また、図22に示すように、ノズル501〜503を支持するノズル支持体600はひし形である必要はない。
また、図22に示すように楕円軌道Aを補正しても良い。すなわち、本発明に係る巻線機1000Aは、ノズル支持体600の旋回速度を遅くして運転するような用途などでは、例えば、ノズル支持体600を回動させる楕円軌道Aを補正するガイド750を備えてもよい。例えば、楕円の長軸を結ぶ弧の部分で、ノズル支持体600が直線状に動くようにガイド溝751が形成されており、ノズル支持体600に設けたピン752が当該ガイド溝751に係合し、ノズル支持体600が旋回する軌道Bが補正されている。この実施形態では、ノズル支持体600と駆動機構100の作用部105の連結構造についても、当該ノズル支持体600の旋回軌道の補正を許容できるように、スライダ753を設けてもよい。なお、図22に示す形態では、楕円Aの長軸を結ぶ弧の部分で、ノズル支持体600が直線状に動く補正された軌道Bが形成されている。駆動機構100によって、さらに縦長の楕円Aを形成し、楕円Aの長軸を結ぶ弧の部分を直線に近づけるとともに、両端部を補正し、ノズル支持体600が必要以上に縦方向に動かないように、ガイドを設けても良い。Further, as shown in FIG. 22, the
Further, the elliptical orbit A may be corrected as shown in FIG. That is, the winding
また、上述した実施形態では、作用部105を遊星歯車131のピッチ円103cの内側にずらして配設されている。これによって、作用部105を楕円軌道Aで旋回させているが、図23に示すように、作用部105を遊星歯車131のピッチ円103cの外側にずらして楕円軌道を形成してもよい。このように、作用部105が遊星歯車131のピッチ円103cの外側にずれている場合には、同じ形状の楕円軌道を形成する際に、遊星歯車131や内周太陽歯車102を小さくできる。また、駆動機構100の各部材、例えば、クランク部材104なども小さくできる。このため、駆動機構100に作用する慣性力を小さく抑えることができる。
Further, in the above-described embodiment, the
また、駆動機構100の各部材について、特に、クランク部材104など、回転に伴う慣性力が駆動時に生じる部材については、軽量化を図ることが望ましい。例えば、アルミ合金などの軽い材料を用いたり、所要の強度を確保しつつ、肉厚を減らしたりしても良い。
In addition, it is desirable to reduce the weight of each member of the
以上、本発明の一実施形態に係る巻線機について、種々の変形例を例示したが、本発明に係る巻線機は、上述した変形例にも限定されない。 As mentioned above, although the various modifications are illustrated about the winding machine concerning one embodiment of the present invention, the winding machine concerning the present invention is not limited to the modification mentioned above.
100 駆動機構
101 クランクケース
102 内周太陽歯車
103 遊星歯車部材
104 クランク部材
105 作用部
131 遊星歯車
132 遊星軸
145 第1カウンターウェイト
146 第1バランサー
161 第2カウンターウェイト
162 第2バランサー
181〜184 軸受
186 シール
200 モータ
201 タイミングベルト
210 プーリ
501〜503 ノズル
510 線材
600 ノズル支持体
610 中央部
620、630 ノズル支持体の両側部
700、700A ケーシング
710 ノズル旋回空間
712 支持体旋回空間
720 スリット状の隙間
722 装着溝
730 シール
731 第1シール
732 第2シール
750 ガイド
751 ガイド溝
752 ピン
753 スライダ
772 シール材を装着する溝
773 シール材
775 Oリング
780 滑り支持部
810 ガスケット
820 オイル供給穴
830 排出穴
1000、1000A 巻線機
A 楕円軌道DESCRIPTION OF
Claims (12)
前記ノズル支持体の離れた少なくとも2箇所の位置にそれぞれ連結され、同じ楕円軌道で同期して旋回する作用部を有する駆動機構と、
を備えた巻線機であって、
前記駆動機構は、
クランクケースと、
前記クランクケースに固定的に配設された内周太陽歯車と、
前記内周太陽歯車に遊星歯車を噛み合わせつつ自転及び公転する遊星歯車部材と、
前記内周太陽歯車の中心線と同軸に回転するように前記クランクケースに配設され、前記遊星歯車部材を自転及び公転可能に支持するクランク部材と
を備え、
前記遊星歯車は、内周太陽歯車のピッチ円直径の2分の1のピッチ円直径を有し、
前記遊星歯車部材は、前記遊星歯車のピッチ円上からずらした位置に前記遊星歯車の自転及び公転に伴って楕円軌道で駆動する作用部を有しており、
前記クランク部材は、軸部材であり、前記クランク部材の片側の端面には、前記遊星歯車部材を装着する装着穴が軸方向に形成されており、
当該装着穴の中心軸は、前記クランク部材の回転軸から遊星歯車のピッチ円の半径の距離だけずれた位置に形成されており、
当該装着穴には、軸受を介在させて、前記遊星歯車部材が回動自在に支持されている、巻線機。A nozzle support for supporting a nozzle for feeding out the wire,
A drive mechanism connected to at least two positions away from the nozzle support and having an action part that rotates in the same elliptical orbit synchronously;
A winding machine comprising:
The drive mechanism is
A crankcase,
An inner sun gear fixedly disposed on the crankcase;
A planetary gear member that rotates and revolves while meshing a planetary gear with the inner circumferential sun gear;
A crank member disposed in the crankcase so as to rotate coaxially with the center line of the inner sun gear, and supporting the planetary gear member so as to be capable of rotating and revolving,
The planetary gear has a pitch circle diameter that is a half of the pitch circle diameter of the inner circumferential sun gear;
The planetary gear member has an action portion that is driven by an elliptical orbit along with the rotation and revolution of the planetary gear at a position shifted from the pitch circle of the planetary gear ,
The crank member is a shaft member, and a mounting hole for mounting the planetary gear member is formed in an axial direction on one end face of the crank member,
The center axis of the mounting hole is formed at a position shifted from the rotation axis of the crank member by the distance of the radius of the pitch circle of the planetary gear,
A winding machine in which the planetary gear member is rotatably supported in the mounting hole with a bearing interposed therebetween .
前記クランク部材は、前記クランク部材に作用する遠心力が釣り合い、かつ、前記クランク部材の回転軸上の任意の位置で前記クランク部材に作用する遠心力のモーメントが釣り合っている、請求項1から5までの何れかに記載された巻線機。The planetary gear member balances the centrifugal force acting on the planetary gear member, and balances the moment of centrifugal force acting on the planetary gear member at an arbitrary position on the rotational axis of the planetary gear member,
The crank member, the centrifugal force balance acting on the crank member and the moment of the centrifugal force acting on the crank member at an arbitrary position on the rotation axis of the crank member is balanced, claims 1-5 Winding machine described in any of the above.
前記作用部が設けられた側の端部に設けられた前記第1カウンターウェイトと、
前記作用部が設けられた位置から軸方向に離れた遊星歯車部材の軸方向の端部に設けられた第1バランサーと、
を有し、
前記第1カウンターウェイトと前記第1バランサーとによって、前記遊星歯車部材に作用する遠心力が釣り合い、かつ、前記遊星歯車部材の回転軸上の任意の位置で前記遊星歯車部材に作用する遠心力のモーメントが釣り合っている、請求項6に記載された巻線機。The planetary gear member is
The first counterweight provided at the end on the side where the action portion is provided;
A first balancer provided at an axial end of the planetary gear member that is axially separated from a position where the action portion is provided;
Have
The centrifugal force acting on the planetary gear member is balanced by the first counterweight and the first balancer, and the centrifugal force acting on the planetary gear member at an arbitrary position on the rotation axis of the planetary gear member. The winding machine according to claim 6 , wherein the moments are balanced.
当該装着穴が形成されたクランク部材の端面に設けられた第2カウンターウェイトと、
前記第2カウンターウェイトが設けられた位置から軸方向に離れた位置に設けられた第2バランサーと、
を有し、
前記第2カウンターウェイトと前記第2バランサーとによって、前記クランク部材に作用する遠心力が釣り合い、かつ、前記クランク部材の回転軸上の任意の位置で前記クランク部材に作用する遠心力のモーメントが釣り合っている、請求項7に記載された巻線機。The crank member is a shaft member, and a mounting hole for mounting the planetary gear member is formed in an axial direction on one end face of the crank member,
A second counterweight provided on the end face of the crank member in which the mounting hole is formed;
A second balancer provided at a position separated in the axial direction from a position at which the second counterweight is provided;
Have
The second counterweight and the second balancer balance the centrifugal force acting on the crank member, and the moment of the centrifugal force acting on the crank member at an arbitrary position on the rotation shaft of the crank member. The winding machine according to claim 7 .
前記ノズル支持体が旋回する支持体旋回空間と、
前記ノズル旋回空間と前記支持体旋回空間とを仕切るシールとを備えている、請求項9に記載された巻線機。The casing has a nozzle swirl space in which a nozzle supported by the nozzle support swirls, and
A support turning space in which the nozzle support turns; and
The winding machine according to claim 9 , comprising a seal that partitions the nozzle swirl space and the support swirl space.
前記環状のシール材は、前記ノズル旋回空間を囲むように配設され、ノズル支持体の表面に押し当てられており、
前記環状のシール材のノズル支持体に対向する面は、内側から外側に向かうにつれて、徐々にノズル支持体に近づくように突出したテーパ形状を有している、請求項10に記載された巻線機。The seal includes an annular seal material,
The annular sealing material is disposed so as to surround the nozzle swirling space, and is pressed against the surface of the nozzle support,
11. The winding according to claim 10 , wherein a surface of the annular seal material facing the nozzle support has a tapered shape that gradually protrudes so as to approach the nozzle support gradually from the inside toward the outside. Machine.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008153488 | 2008-06-11 | ||
| JP2008153488 | 2008-06-11 | ||
| PCT/JP2009/060460 WO2009151028A1 (en) | 2008-06-11 | 2009-06-08 | Wire winding machine |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010097703A Division JP5423978B2 (en) | 2008-06-11 | 2010-04-21 | Winding machine |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP4565078B2 true JP4565078B2 (en) | 2010-10-20 |
| JPWO2009151028A1 JPWO2009151028A1 (en) | 2011-11-17 |
Family
ID=41416735
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009545017A Active JP4565078B2 (en) | 2008-06-11 | 2009-06-08 | Winding machine |
| JP2010097703A Active JP5423978B2 (en) | 2008-06-11 | 2010-04-21 | Winding machine |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010097703A Active JP5423978B2 (en) | 2008-06-11 | 2010-04-21 | Winding machine |
Country Status (3)
| Country | Link |
|---|---|
| JP (2) | JP4565078B2 (en) |
| CN (2) | CN101999202B (en) |
| WO (1) | WO2009151028A1 (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010193710A (en) * | 2008-06-11 | 2010-09-02 | Lwj Kk | Wire winding machine |
| WO2011049212A1 (en) * | 2009-10-22 | 2011-04-28 | Lwj株式会社 | Wire winding machine |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104952609B (en) * | 2015-06-15 | 2017-04-12 | 中国科学院电工研究所 | Planetary no-superconducting joint multi-bread coil winding machine |
| JP6589933B2 (en) * | 2017-05-12 | 2019-10-16 | 株式会社村田製作所 | Winding device |
| JP6589934B2 (en) * | 2017-05-12 | 2019-10-16 | 株式会社村田製作所 | Winding device and method of manufacturing coil component |
| JP6669127B2 (en) * | 2017-05-12 | 2020-03-18 | 株式会社村田製作所 | Winding device |
| US20190214893A1 (en) * | 2018-01-11 | 2019-07-11 | Aumann Espelkamp Gmbh | Wire outlet nozzle arrangement |
| CN110034643A (en) * | 2018-01-11 | 2019-07-19 | 奥曼埃斯珀尔坎普有限公司 | Outlet mouthpiece configures system |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6135138A (en) * | 1984-07-26 | 1986-02-19 | Chuo Denki Seisakusho:Kk | Winding unit of stator core |
| JPH07322580A (en) * | 1994-05-25 | 1995-12-08 | Mabuchi Motor Co Ltd | Miniature motor |
| JPH09315682A (en) * | 1996-06-03 | 1997-12-09 | Arutetsuku Kyoto:Kk | Wire winding method for outer rotor type motor and winder therefor |
| JP2001008418A (en) * | 1999-06-18 | 2001-01-12 | Sanko Kiki Kk | Device winding coil on stator core |
| JP2004056949A (en) * | 2002-07-23 | 2004-02-19 | Matsushita Electric Ind Co Ltd | Square trajectory formation device and rectangle trajectory formation device |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4158314A (en) * | 1977-11-17 | 1979-06-19 | The Globe Tool And Engineering Company | High speed stator winder |
| JP2895431B2 (en) * | 1995-11-01 | 1999-05-24 | ロングウェルジャパン株式会社 | Direct-coupled assembly of internal combustion engine and driven machinery |
| JP3425736B2 (en) * | 1996-10-28 | 2003-07-14 | Lwj株式会社 | Crank device |
| JP3177193B2 (en) * | 1997-07-02 | 2001-06-18 | 日特エンジニアリング株式会社 | Winding machine and winding method |
| JP3626018B2 (en) * | 1998-08-27 | 2005-03-02 | Lwj株式会社 | Directly connected reciprocating crank unit |
| JP2009121540A (en) * | 2007-11-13 | 2009-06-04 | Daihatsu Motor Co Ltd | Crank device |
| JP4565078B2 (en) * | 2008-06-11 | 2010-10-20 | Lwj株式会社 | Winding machine |
-
2009
- 2009-06-08 JP JP2009545017A patent/JP4565078B2/en active Active
- 2009-06-08 WO PCT/JP2009/060460 patent/WO2009151028A1/en active Application Filing
- 2009-06-08 CN CN200980112770.2A patent/CN101999202B/en not_active Expired - Fee Related
- 2009-06-08 CN CN201310055774.XA patent/CN103199656B/en not_active Expired - Fee Related
-
2010
- 2010-04-21 JP JP2010097703A patent/JP5423978B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6135138A (en) * | 1984-07-26 | 1986-02-19 | Chuo Denki Seisakusho:Kk | Winding unit of stator core |
| JPH07322580A (en) * | 1994-05-25 | 1995-12-08 | Mabuchi Motor Co Ltd | Miniature motor |
| JPH09315682A (en) * | 1996-06-03 | 1997-12-09 | Arutetsuku Kyoto:Kk | Wire winding method for outer rotor type motor and winder therefor |
| JP2001008418A (en) * | 1999-06-18 | 2001-01-12 | Sanko Kiki Kk | Device winding coil on stator core |
| JP2004056949A (en) * | 2002-07-23 | 2004-02-19 | Matsushita Electric Ind Co Ltd | Square trajectory formation device and rectangle trajectory formation device |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010193710A (en) * | 2008-06-11 | 2010-09-02 | Lwj Kk | Wire winding machine |
| WO2011049212A1 (en) * | 2009-10-22 | 2011-04-28 | Lwj株式会社 | Wire winding machine |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2010193710A (en) | 2010-09-02 |
| CN101999202A (en) | 2011-03-30 |
| JP5423978B2 (en) | 2014-02-19 |
| CN103199656B (en) | 2016-04-13 |
| WO2009151028A1 (en) | 2009-12-17 |
| CN101999202B (en) | 2013-04-24 |
| JPWO2009151028A1 (en) | 2011-11-17 |
| CN103199656A (en) | 2013-07-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5423978B2 (en) | Winding machine | |
| EP2634456B1 (en) | Power transmission device | |
| RU2485211C2 (en) | Processed part carrier system | |
| US5259775A (en) | Flat cable connector | |
| KR101260625B1 (en) | Diaphragm device | |
| JP6868936B2 (en) | Inner tape feed taping method and taping device | |
| CN109313409A (en) | Handle box and electro-photographic image forming apparatus | |
| JP2006234005A (en) | Motor-incorporated hypocycloid-type speed reducer | |
| KR20200072033A (en) | Air cleaning apparatus | |
| CN102257244A (en) | Scroll compressor | |
| JPWO2017203754A1 (en) | Actuator | |
| JP2020076476A (en) | Cycloid speed reducer | |
| JP5470540B2 (en) | Winding machine | |
| KR20190092262A (en) | Flexible engagement gear device | |
| JPH10138062A (en) | Assembling method for epicycle reduction gear, and epicycle reduction gear | |
| JP2018135558A (en) | Workpiece rotation device and film deposition apparatus with the same | |
| US20020108237A1 (en) | Electronic component mounting apparatus | |
| WO2019208551A1 (en) | Film deposition device and film deposition method | |
| JP4409751B2 (en) | Winding device and winding method | |
| JP2014065115A (en) | Method and device for attaching elastic seal ring | |
| JP2019106779A (en) | Permanent magnet rotary machine | |
| JP5139854B2 (en) | Oscillating gear device, unit-type gear device including the same, and assembly method thereof | |
| KR101998641B1 (en) | Wave gear device and actuator | |
| US3975866A (en) | Method and apparatus for machining housings for slant axis rotary mechanisms | |
| JP6067665B2 (en) | Speed change mechanism |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091130 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20091130 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20100112 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100225 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100421 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100603 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100608 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20091130 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4565078 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130813 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |