JP4349334B2 - Electric power steering device - Google Patents
Electric power steering device Download PDFInfo
- Publication number
- JP4349334B2 JP4349334B2 JP2005178619A JP2005178619A JP4349334B2 JP 4349334 B2 JP4349334 B2 JP 4349334B2 JP 2005178619 A JP2005178619 A JP 2005178619A JP 2005178619 A JP2005178619 A JP 2005178619A JP 4349334 B2 JP4349334 B2 JP 4349334B2
- Authority
- JP
- Japan
- Prior art keywords
- electric power
- rack
- power steering
- motor
- pinion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Landscapes
- Steering Control In Accordance With Driving Conditions (AREA)
- Power Steering Mechanism (AREA)
Description
本発明は、車輌の舵輪操作に要する力を電動モータの回転力により補助する電動式パワーステアリング装置の性能向上に関する。 The present invention relates to an improvement in the performance of an electric power steering apparatus that assists a force required to operate a steering wheel of a vehicle with a rotational force of an electric motor.
操舵力を補助するために用いられる車輌のパワーステアリング装置として、電動モータ(以下、「モータ」という。)の回転力を利用して、運転者による舵輪の操舵力を補助するように構成した電動式パワーステアリング装置が知られている。 As a power steering device for a vehicle used for assisting a steering force, an electric motor configured to assist the steering force of a steering wheel by a driver using the rotational force of an electric motor (hereinafter referred to as “motor”). A type power steering device is known.
この種の電動式パワーステアリング装置の一例として、運動を直線運動に変換するラック・ピニオン式運動変換機構を採用したパワーステアリング装置が特公平7−25311号公報に示されている。 As an example of this type of electric power steering apparatus, Japanese Patent Publication No. 7-25311 discloses a power steering apparatus that employs a rack and pinion type motion conversion mechanism that converts motion into linear motion.
図8は、従来のラック・ピニオン式運動変換機構の拡大断面図である。この機構においてピニオン軸86はその端部の外周面にピニオン歯86aが形成され、ラック軸81には、その一端部近傍において、軸長方向に偏平部が形成され、偏平部はその全長に亘りラック歯81aが形成されている。ピニオン歯86aとラック歯81aは噛合し回転運動を直線運動に変換する。ラック歯81aは、ピニオン歯86aに対するギヤ比を車輌が直進する方向の位置で小さくなるように、そして舵角が大きい位置でギヤ比が大きくなるように螺刻されることによって回転出力の比較的小さい電動モータにも拘わらず操舵力を一定に保つような工夫がなされている。
FIG. 8 is an enlarged cross-sectional view of a conventional rack and pinion type motion conversion mechanism. In this mechanism, the
このラック・ピニオン式運動変換機構においてほぼ筒形の部材内で押圧部材80の一端に当接するコイルスプリング89の付勢力によりラック軸81を押圧しラック歯81aとピニオン歯86aとの噛合を維持している。この噛合によりピニオン軸86の回動をラック軸81の軸長方向への直線運動に変換するとともに、押圧部材80はラック軸81の外周面を摺動する。従って、この構造では摺動面の摩耗が著しく、コイルスプリング89による押圧力(付勢力)が制限される。そのため、ピニオン軸に比較的大きなトルクが加わるピニオン・アシスト式電動式パワーステアリングのような電動式パワーステアリング機構においては、必要な押圧力が得られずピニオン歯86a及びラック歯81aの噛合面周辺からラトル音などの異音が発生してしまうといった欠点を有している。
In this rack-and-pinion type motion converting mechanism, the
電動式パワーステアリング装置は、一般に、舵輪の回転軸とラック・ピニオン式運動変換機構のピニオン軸とをジョイントによって接続している。電動式パワーステアリング装置には、モータ及びそのモータの減速機構が前記ジョイントよりも舵輪側にあるコラムタイプの電動式パワーステアリング装置と、モータ及びそのモータの減速機構が前記ジョイントよりもラック・ピニオン機構側にあるピニオンタイプの電動式パワーステアリング装置とがある。 In general, an electric power steering apparatus connects a rotating shaft of a steering wheel and a pinion shaft of a rack and pinion type motion conversion mechanism by a joint. The electric power steering apparatus includes a column type electric power steering apparatus in which a motor and a speed reduction mechanism of the motor are closer to the steering wheel than the joint, and a rack and pinion mechanism in which the motor and the speed reduction mechanism of the motor are more than the joint. There is a pinion type electric power steering device on the side.
電動式パワーステアリング装置を高出力化するときにおいて、レイアウト性などによりモータのサイズが限定され、そのモータの出力も限定されるという問題点が生じる。この問題点を解決すべく、機械系、特にラック・ピニオン式運動変換機構の効率を上げてモータの効率を有効に使う方法が提案されている。この方法としては、ラック・ピニオン式運動変換機構において、ラック軸をピニオン軸に対して押圧するプレッシャーパッド部として回転可能なローラを用いる技術(以下、「転がり式ラック・ピニオン運動変換機構」という。)が考えだされている。この転がり式ラック・ピニオン運動変換機構によれば、ラック軸及びピニオン軸間に高い負荷が掛かる場合に機械効率を大幅に向上させることができる。 When increasing the output of an electric power steering device, there is a problem that the size of the motor is limited due to layout and the like, and the output of the motor is also limited. In order to solve this problem, a method has been proposed in which the efficiency of the motor is effectively increased by increasing the efficiency of the mechanical system, particularly the rack and pinion motion conversion mechanism. As this method, in the rack and pinion type motion converting mechanism, a technique using a rotatable roller as a pressure pad portion that presses the rack shaft against the pinion shaft (hereinafter referred to as “rolling type rack and pinion motion converting mechanism”). ) Has been conceived. According to the rolling rack and pinion motion conversion mechanism, the mechanical efficiency can be greatly improved when a high load is applied between the rack shaft and the pinion shaft.
しかしながら、転がり式ラック・ピニオン運動変換機構とコラムタイプ電動式パワーステアリング装置又はピニオンタイプ電動式パワーステアリング装置とを組み合わせた場合は、路面からのキックバックに対してモータが応答しないため、他の従来の電動式パワーステアリング装置に比べてラック・ピニオン機構に過大な負荷がかかってしまう。 However, when a rolling rack and pinion motion conversion mechanism is combined with a column type electric power steering device or a pinion type electric power steering device, the motor does not respond to kickback from the road surface. The rack and pinion mechanism is overloaded as compared with the electric power steering apparatus.
さらに、この場合は、摺動面が転がりであるためキックバック力の減衰が従来のすべり式に比べて悪いので、ラトル音が発生し易くなるという問題がある。 Furthermore, in this case, since the sliding surface is rolling, the attenuation of the kickback force is worse than that of the conventional sliding type, so that there is a problem that rattle noise is likely to occur.
さらにまた、この場合は、転がり式ラック・ピニオン運動変換機構を導入する他の目的に摩擦力低減によるハンドル戻り特性及びオンセンター感の向上があるが、モータの摩擦力の影響が転がり式ラック・ピニオン運動変換機構による改善分よりも大きいので、その目的を達成するほどの効果は得られていないという問題がある。 Furthermore, in this case, the other purpose of introducing the rolling rack and pinion motion conversion mechanism is to improve the handle return characteristics and the on-center feeling by reducing the frictional force, but the influence of the frictional force of the motor is influenced by the rolling rack and pinion. Since it is larger than the improvement by the pinion motion conversion mechanism, there is a problem that the effect to achieve the purpose is not obtained.
本発明は上述のような事情によりなされたものであり、本発明の目的は、ラック・ピニオン運動変換機構に過大な荷重が発生することを防ぐことができ、ラトル音の発生を抑え、モータの摩擦力の影響を軽減することができる電動式パワーステアリング装置を提供することにある。 The present invention has been made under the circumstances described above, and an object of the present invention is to prevent an excessive load from being generated in the rack and pinion motion conversion mechanism, to suppress the generation of rattle noise, An object of the present invention is to provide an electric power steering apparatus that can reduce the influence of frictional force.
本発明の目的は、操舵輪に所望の舵角を付与する操向機構と、運転者による舵輪の操舵力を補助するモータとを備える電動式パワーステアリング装置に関するもので、前記操向機構から前記モータの出力軸までの機構経路中に弾性体を挿入するとともに、摩擦補償制御をするコントロールユニットによって、前記モータを制御するようにしたことによって達成される。
An object of the present invention relates to an electric power steering apparatus including a steering mechanism that gives a steered wheel a desired steering angle and a motor that assists the steering force of the steering wheel by a driver. This is achieved by inserting an elastic body into the mechanism path to the output shaft of the motor and controlling the motor by a control unit that performs friction compensation control.
また、本発明の上記目的は、操舵輪に所望の舵角を付与する操向機構と、運転者による舵輪の操舵力を補助するモータとを備える電動式パワーステアリング装置に関するもので、前記舵輪軸と前記モータとの間に減速機構を備え、前記モータの出力軸から前記減速機構までの機構経路中に弾性体を挿入するとともに、摩擦補償制御をするコントロールユニットによって、前記モータを制御するようにしたことによってより効果的に達成される。
The above object of the present invention also relates to an electric power steering apparatus comprising a steering mechanism for giving a desired steering angle to a steered wheel and a motor for assisting a steering force of the steered wheel by a driver. A reduction mechanism between the motor and the motor, and an elastic body is inserted into a mechanism path from the output shaft of the motor to the reduction mechanism, and the motor is controlled by a control unit that performs friction compensation control. Is achieved more effectively.
また、本発明の上記目的は、前記減速機構を、前記モータに連結されたウォームと、前記舵輪軸に連結されたウォームホイールとで構成することによってより効果的に達成される。
The above-mentioned object of the present invention can be achieved more effectively by configuring the speed reduction mechanism with a worm connected to the motor and a worm wheel connected to the rudder wheel shaft.
また、本発明の上記目的は、前記舵輪軸上にトルクセンサが配置されており、前記トルクセンサからの検出信号によって摩擦補償制御を行うことによってより効果的に達成される。
Further, the above object of the present invention is achieved more effectively by arranging a torque sensor on the rudder wheel shaft and performing friction compensation control by a detection signal from the torque sensor.
また、本発明の上記目的は、前記摩擦補償制御を、モータの摩擦補償制御にしたことによってより効果的に達成される。
また、本発明の上記目的は、前記摩擦補償制御を、操舵トルク信号の微分に比例した値を操舵補助指令値に加算することによって行われることによってより効果的に達成される。
Further, the above object of the present invention can be achieved more effectively by making the friction compensation control the friction compensation control of a motor.
The above-mentioned object of the present invention is more effectively achieved by performing the friction compensation control by adding a value proportional to the derivative of the steering torque signal to the steering assist command value.
また、本発明の上記目的は、前記操向機構を、ラック・ピニオン式運動変換機構にしたことによってより効果的に達成される。
さらに、本発明の上記目的は、前記ラック・ピニオン式運動変換機構を、転がり式ラック・ピニオン式運動変換機構にしたことによってより効果的に達成される。
The above-mentioned object of the present invention can be achieved more effectively by making the steering mechanism a rack and pinion type motion conversion mechanism.
Furthermore, the above-mentioned object of the present invention is more effectively achieved by replacing the rack and pinion type motion converting mechanism with a rolling type rack and pinion type motion converting mechanism.
本発明によれば、転がり式ラック・ピニオン運動変換機構を用いた電動式パワーステアリング装置において、転がり式ラック・ピニオン運動変換機構のピニオン軸からモータの出力軸までの経路に弾性体を挿入したので、転がり式ラック・ピニオン運動変換機構に過大な荷重が発生することを防ぐことができ、ラトル音の発生を抑え、モータの摩擦力の影響を軽減することができる電動式パワーステアリング装置を提供することができる。 According to the present invention, in the electric power steering apparatus using the rolling rack and pinion motion conversion mechanism, the elastic body is inserted in the path from the pinion shaft of the rolling rack and pinion motion conversion mechanism to the output shaft of the motor. Provided is an electric power steering device that can prevent an excessive load from being generated in a rolling rack and pinion motion conversion mechanism, suppress the occurrence of rattle noise, and reduce the influence of the frictional force of the motor. be able to.
本発明によると、図7に示すようなコラムタイプ電動式パワーステアリング装置又は図6に示すようなピニオンタイプ電動式パワーステアリング装置に、転がり式ラック・ピニオン運動変換機構4を用いた場合に、ラック・ピニオン運動変換機構4のピニオン軸6からパワーステアリングの駆動源となるモータ41までの経路に吸振性のある弾性体を挿入しているので、ピニオン軸6がモータ41に対して相対運動することができることにより、転がり式ラック・ピニオン運動変換機構4に過大な荷重が発生することを防ぐことができる。
According to the present invention, when the rolling rack and pinion
図7に示すようなコラムタイプ電動式パワーステアリング装置及び図6に示すようなピニオンタイプ電動式パワーステアリング装置の両タイプともに、モータ41とそのモータ41の減速機構であるウォームホイール3との間に吸振性のある弾性体を挿入することで、本発明の効果を得ることができる。図7に示すようなコラムタイプ電動式パワーステアリング装置では、ウォームホイール3の回転軸と転がり式ラック・ピニオン運動変換機構4のピニオン軸6との間に配置されたジョイント51に、吸振性のある弾性体を挿入することで、本発明の効果を得ることができる。
Both the column type electric power steering apparatus as shown in FIG. 7 and the pinion type electric power steering apparatus as shown in FIG. 6 are provided between the
また、本発明によると、前記吸振性のある弾性体がもつ減衰作用により、転がり式ラック・ピニオン運動変換機構4がもつキックバック力の減衰作用の不足分を補うので、ラトル音の発生を防ぐことができる。
In addition, according to the present invention, the damping action of the elastic body having vibration absorption compensates for the deficiency of the damping action of the kickback force of the rolling rack and pinion
さらにまた、本発明によると、吸振性のある弾性体をモータ41とそのモータ41の減速機構との間に介在させることにより、その弾性体の弾性領域においてモータ41の回転軸とピニオン軸6とを連結する舵輪軸の相対回転を可能にしているので、例えば、モータ41がその摩擦力によって停止している状況においても、ピニオン軸6に連動して舵輪軸31が回転可能となり、モータ41の摩擦力の影響を軽減でき、転がり式ラック・ピニオン運動変換機構4とコラムタイプ電動式パワーステアリング装置又はピニオンタイプ電動式パワーステアリング装置とを組み合わせた技術の効果を生かすことができる。
Furthermore, according to the present invention, an elastic body having vibration absorption is interposed between the
さらにまた、本発明によると、トルクセンサ信号を用いた摩擦補償制御は、従来の構成ではラック・ピニオン運動変換機構4又はモータ41によって路面情報がブロックされてしまいその路面情報がトルクセンサまで伝わらないためその摩擦補償制御の効果が得られなかったものが、本発明の構成によれば、路面情報がトルクセンサまで伝わるので、トルクセンサ信号を用いた摩擦補償制御によってモータの摩擦を補償することが可能となり、モータがふんばることによるラトル音の発生を効果的に抑制することができる。
Furthermore, according to the present invention, the friction compensation control using the torque sensor signal is such that in the conventional configuration, the road surface information is blocked by the rack and pinion
以下、本発明の実施の形態を図面を参照して詳細に説明する。 Hereinafter, embodiments of the present invention will be described in detail with reference to the drawings.
図1は本発明の実施形態に係る電動式パワーステアリング装置を含む前輪転舵機構の主要部を示す正面図である。 FIG. 1 is a front view showing a main part of a front wheel steering mechanism including an electric power steering apparatus according to an embodiment of the present invention.
図1において、舵輪軸31は、車室内部の所定位置に下部を前方に向けて傾斜した状態に固定され、円筒形のハウジング32内に、軸心回りに回動自在に支承されている。ハウジング32の上部から所定の長さ突出した舵輪軸31の上端部には、舵輪(図示せず)が固着されている。
In FIG. 1, the
ラック・ピニオン式運動変換機構4は、長手方向を車輌の左右方向とし、車輌前部のエンジンルーム内にほぼ水平に装設された筒状をなすラック軸ケース36と、このラック軸ケース36にこれと軸心をほぼ一致させ軸長方向に移動自在に内挿されたラック軸13と、ラック軸ケース36内部にラック軸13の軸心に対して斜めに支承され、ラック軸13と係合させたピニオン軸6等とで構成されている。
The rack-and-pinion type
図2は、本発明の実施形態に係る電動式パワーステアリング装置における転がり式ラック・ピニオン式運動変換機構を示す断面図である。 FIG. 2 is a sectional view showing a rolling rack and pinion type motion conversion mechanism in the electric power steering apparatus according to the embodiment of the present invention.
図2において上部は舵輪の回転が舵輪軸31側からユニバーサルジョイント19(図1参照)を介して伝えられる入力軸18であり、入力軸18の下部には回動可能にピニオン軸6が同軸的に装着されている。また、入力軸18にはトルクセンサ部1が連結されていて、ステアリング系の負荷を検出してECU(電気制御部、図示せず)にそのトルク信号を伝達する役目を担っている。
In FIG. 2, the upper part is an
ECUより車速信号とトルク信号に基づいて演算され出力された電流が印加されると電動モータ(不図示)は回転し、その回転はウォーム2に伝達される。ウォーム2は操舵力を補助する電動モータと同軸上に配設されている。更に、ウォーム2の回転力をピニオン軸18上に嵌合しているウォームホイール3(図3参照)で減速させトルクを拡大させてピニオン軸6の回転運動を補助する。
When an electric current calculated and output from the ECU based on the vehicle speed signal and the torque signal is applied, the electric motor (not shown) rotates, and the rotation is transmitted to the worm 2. The worm 2 is disposed coaxially with the electric motor that assists the steering force. Furthermore, the rotational force of the worm 2 is decelerated by the worm wheel 3 (see FIG. 3) fitted on the
ピニオン軸6は、ギヤボックス内部に軸受5、 15を介して軸承されている。ピニオン軸6の外周にはピニオン歯6aが形成され、ピニオン歯6aに操向機構であるラック軸13のラック歯13aが噛合し、ラック軸13を軸長方向(図2の表裏方向)に変位させてタイロッド21(図1参照)を介して最終的に操舵輪(図示せず)に所望の舵角を付与する構成である。
The
ラック軸13はその端部の一部が断面で半円筒形となっており、その偏平部13bにラック歯13aがラック軸13の軸線方向に螺刻されている。ラック歯13aとピニオン歯6aが噛合することにより、ピニオン軸6の回転運動がラック軸13の直線運動に変換される。この噛合関係を保つためにプレッシャーパッド部20がラック軸13を介して噛合部に押圧力を付与している。また、噛合部に押庄力を付与するための機構が、ギヤボックス4からピニオン軸6の軸線方向と直交する方向に突出するほぼ円筒形のハウジング16内に設けられている。
A part of the end of the
プレッシャーパッド部20は、ローラ10、ニードル軸受11、ピン軸12、及び軸受ホルダ14を具備し、ピニオン歯6aとラック歯13aとの噛合を維持するように所定の押圧力でピニオン軸6に対してラック軸13を押圧している。プレッシャーパッド部20は、軸受ホルダ14によりピン軸12を所定の場所に位置決めし、ラック軸13の軸線方向の移動に伴いピン軸12の周りにローラ10が回動可能となる構成となっている。尚、本実施例では、ローラ10のみがラック軸13の外周面13cと摺擦する。即ち、ローラ10がラック軸13に対し転がりとなる構成である。
The
プレッシャーパッド部20をハウジング16内部に収容した状態において、軸受ホルダ14、ピン軸12、ニードル軸受11、及びローラ10から構成されるプレッシャーパッド部20は、ハウジング16内をその軸線方向に一体的に移動可能である。
In a state where the
さらに、プレッシャーバッド部20のラック軸13と反対側には弾性部材であるコイルスプリング9がハウジング16内に配置されている。プレッシャーパッド部20に押圧力を付与するコイルスプリング9の一端はプレッシャーパッド部20(軸受ホルダ14の面)に当接し、他端はロックナット7とともにハウジング16の端部に螺合されているアジャストスクリュウ8に当接している。
Further, a coil spring 9, which is an elastic member, is disposed in the
従って、アジャストスクリュウ8を調整し軸方向に移動させることにより、ハウジング16内部に延在するコイルスプリング9によるプレッシャーパッド部20に与える押圧力を調整することができる。
Therefore, by adjusting the
このような転がり式ラック・ピニオン式運動変換機構によれば、ラック軸及びピニオン軸間に高い負荷が掛かる場合に機械効率を大幅に向上させることができる。 According to such a rolling rack and pinion motion conversion mechanism, the mechanical efficiency can be greatly improved when a high load is applied between the rack shaft and the pinion shaft.
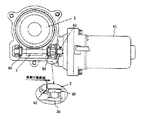
図3は、本発明の実施形態に係る電動式パワーステアリング装置におけるパワーステアリングの駆動源となるモータとそのモータの減速機構を示す部分断面図である。この実施形態の特徴は、モータ41の減速機構におけるウォーム2がそのウォーム軸方向に移動可能となるように、そのウォーム2の両端部位とウォーム軸受35との間に弾性体であるゴム60を配置している点である。
FIG. 3 is a partial cross-sectional view showing a motor serving as a power steering drive source and a reduction mechanism for the motor in the electric power steering apparatus according to the embodiment of the present invention. The feature of this embodiment is that
ゴム60の弾性域(移動可能範囲)では、ウォームホイール3の回転はウォーム2に発生するトルクがモータ41の摩擦力及びイナーシャに打ち勝つまではウォームの軸方向の変位となり、モータ41の回転とピニオン軸6に連動したウォームホイール3の回転とは連動しない。すなわち、路面からのキックバックをウォームホイール3が受けた場合は、ウォーム2をスライドさせ、ゴム60によりキックバックの衝撃を吸収する構造となっている。
In the elastic range (movable range) of the
このような構造によれば、ゴム60によるウォーム2の移動可能範囲では、キックバック力をモータ41に集束させることなくピニオン軸6の回転方向に逃がすことができるので、ラック・ピニオン機構に負荷が集中することを防ぐことができる。また、このような構造によれば、ゴム60の制振作用により、転がり式ラック・ピニオン運動変換機構の欠点である制振作用の不足を補うので、ラトル音の発生を防ぐことができる。
According to such a structure, in the movable range of the worm 2 by the
図4は、本発明の他の実施形態であって、電動式パワーステアリング装置においてモータの摩擦補償制御をするコントロールユニット40を示すブロック図である。
FIG. 4 is a block diagram showing a
コントロールユニット40は、アシストトルクの応答性向上とトルク制御系の安定性向上を目的として、アシスト量(操舵補助指令値)に対して操舵トルク信号の微分に比例した値を、制御系の応答性を高めるために加算している。このようにトルク量を微分した信号をアシスト量に加算している。また、操舵トルクが大きくかつハンドルが戻る時、つまり操舵角θが減少するときの負のゲインを適用することになり、アシスト量(操舵補助指令値)の急激な減少を防ぎ、結果として高トルク域では大きなヒステリシス特性を、中立点近傍の低トルク域では小さなヒステリシス特性を与えることになる。
The
すなわち、コントロールユニット40は、モータ41の摩擦の影響を補償する目的でトルク検出値であるトルク信号Trに基づいた摩擦補償制御を行なう。この摩擦補償制御は、操舵トルクの小さいセンター付近のトルク制御の応答性を速くするものであり、トルクを検出しているトーションバーのねじれを少なく抑える方向に作用する。一方、モータ41の摩擦は、トーションバーのねじれを増す方向に作用する。したがって、モータ41の摩擦をトーションバーのねじれとして検出できれば、コントロールユニット40による摩擦補償制御で摩擦補償することが可能となる。
That is, the
しかし、トーションバーは、モータ41よりハンドル側に配置されているため、ハンドル側からの入力に対しては摩擦補償することができるが、キックバック等の路面からの入力に対しては補償が困難であり、摩擦補償制御によりラック・ピニオン式運動変換機構4のラトル音を低減することはできなかった。
However, since the torsion bar is disposed closer to the handle than the
ところが、図3に示すような弾性体であるゴム60の弾性領域では、路面からの入力をトルクセンサ1で検出することができ、摩擦補償制御が路面からの入力に対しても有効になる。一旦、コントロールユニット40による摩擦補償制御が働くとモータ41の摩擦が補償され路面からの入力をトルクセンサ1で検出することが可能になる。すなわち、ゴム60と摩擦補償制御により、ゴム60の弾性域を越えてキックバック力をラック・ピニオン式運動変換機構4からハンドル側に逃がすことが可能になる。さらに、コントロールユニット40による摩擦補償制御をチューニングすることにより、ラック・ピニオン式運動変換機構4のラトル音を抑え、適度に路面情報を舵輪に伝えるチューニングが可能になる。
However, in the elastic region of the
図3に示すような弾性体であるゴム60は、モータ41の減速機構からモータ41の摩擦あるいは慣性をもたらしている機構までの位置のどこに配置しても、上述した転がり式ラック・ピニオン運動変換機構に過大な荷重が発生することを防ぐ効果、転がり式ラック・ピニオン運動変換機構がもつキックバック力の減衰作用の不足分を補いラトル音の発生を防ぐ効果、及びモータの摩擦力の影響を軽減する効果を得ることができる。
The
図5は、本発明の他の実施形態であって、電動式パワーステアリング装置を含む前輪転舵機構の主要部を示す正面図である。この実施形態では、図3に示すような弾性体であるゴム60を、ラック・ピニオン運動変換機構4のピニオン軸6とモータ41の減速機構の出力軸50とを結合するジョイント51に配置したものである。
FIG. 5 is a front view showing a main part of a front wheel steering mechanism including an electric power steering device according to another embodiment of the present invention. In this embodiment,
2 ウォーム
3 ウォームホイール
4 ラック・ピニオン運動変換機構
6 ピニオン軸
10 ローラ
13 ラック軸
18 入力軸
19 ユニバーサルジョイント
20 プレッシャーパッド部
31 舵輪軸
36 ラック軸ケース
40 コントロールユニット
41 モータ
42 スプライン
43 ブッシュ
51 ジョイント
60 ゴム
2 Worm 3
Claims (6)
前記モータに連結されたウォームと、前記舵輪軸に連結されたウォームホイールとからなる減速機構と、
前記ウォームの軸上に配設された弾性体と、
前記舵輪軸上に配置されたトルクセンサからの検出信号に基づいて摩擦補償制御するコントロールユニットと、を備え、
前記ウォーム軸は、前記弾性体の弾性域の範囲で軸方向両側に変位可能であり、かつ、
前記コントロールユニットは、前記舵輪側および路面側からの両方向の入力に対して摩擦補償を実行可能であることを特徴とする電動式パワーステアリング装置。 In an electric power steering apparatus comprising a steering mechanism for giving a desired steering angle to a steered wheel and a motor for assisting a steering force of the steered wheel by a driver,
A speed reduction mechanism comprising a worm coupled to the motor and a worm wheel coupled to the steering wheel shaft;
An elastic body disposed on the shaft of the worm ;
A control unit that performs friction compensation control based on a detection signal from a torque sensor disposed on the rudder wheel shaft ,
The worm shaft is displaceable on both sides in the axial direction within the range of the elastic region of the elastic body, and
The electric power steering apparatus according to claim 1, wherein the control unit is capable of performing friction compensation with respect to inputs in both directions from the steering wheel side and the road surface side .
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005178619A JP4349334B2 (en) | 2005-06-17 | 2005-06-17 | Electric power steering device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005178619A JP4349334B2 (en) | 2005-06-17 | 2005-06-17 | Electric power steering device |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP10335218A Division JP2000159128A (en) | 1998-11-26 | 1998-11-26 | Electric power steering device |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2005280707A JP2005280707A (en) | 2005-10-13 |
| JP2005280707A5 JP2005280707A5 (en) | 2006-01-19 |
| JP4349334B2 true JP4349334B2 (en) | 2009-10-21 |
Family
ID=35179527
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005178619A Expired - Fee Related JP4349334B2 (en) | 2005-06-17 | 2005-06-17 | Electric power steering device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4349334B2 (en) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101477894B1 (en) * | 2013-03-11 | 2014-12-30 | 주식회사 만도 | Electronic control unit and steering apparatus for controlling motor current |
| CN108238097A (en) * | 2018-03-13 | 2018-07-03 | 苏州青飞智能科技有限公司 | A kind of automatic driving vehicle steering control system |
-
2005
- 2005-06-17 JP JP2005178619A patent/JP4349334B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005280707A (en) | 2005-10-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6412591B1 (en) | Electric power steering apparatus | |
| JP3158346B2 (en) | Rack and pinion type steering device | |
| JP3646205B2 (en) | Electric power steering device | |
| US20140041475A1 (en) | Reducer of electric power steering apparatus | |
| US5927429A (en) | Electric power steering apparatus | |
| JP5984010B2 (en) | Steering device | |
| JP2007112240A (en) | Electric power steering device | |
| JP4655739B2 (en) | Electric power steering device | |
| US5687811A (en) | Variable gear ratio steering device | |
| JP4349334B2 (en) | Electric power steering device | |
| KR102208240B1 (en) | Steering assistant device for power steering apparatus | |
| KR20080039596A (en) | Compensational apparatus of free apartness of worm shaft for electric power steering system | |
| JP4019936B2 (en) | Electric power steering device | |
| KR101452545B1 (en) | Reducer of Electric Power Steering Apparatus | |
| JP6120047B2 (en) | Steering device | |
| JP5001519B2 (en) | Steering device | |
| JP2006264621A (en) | Electric power steering device | |
| US7159689B2 (en) | Electric power steering apparatus | |
| KR20060101622A (en) | Free apatrness absorp structure of electrical power steering system | |
| JPH06239247A (en) | Rack-pinion type steering device | |
| JP2016141343A (en) | Steering device | |
| JP2001130426A (en) | Steering device for vehicle | |
| JP4776345B2 (en) | Electric power steering device | |
| JP2006088848A (en) | Electric power steering device | |
| JP3646201B2 (en) | Vehicle steering system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050908 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050908 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20051124 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080826 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080909 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081107 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090630 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090713 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120731 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120731 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130731 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |