JP4331630B2 - Magnetic sensor - Google Patents
Magnetic sensor Download PDFInfo
- Publication number
- JP4331630B2 JP4331630B2 JP2004029657A JP2004029657A JP4331630B2 JP 4331630 B2 JP4331630 B2 JP 4331630B2 JP 2004029657 A JP2004029657 A JP 2004029657A JP 2004029657 A JP2004029657 A JP 2004029657A JP 4331630 B2 JP4331630 B2 JP 4331630B2
- Authority
- JP
- Japan
- Prior art keywords
- magnetic
- magnetic field
- layer
- magnetization
- sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000005291 magnetic effect Effects 0.000 title claims description 345
- 230000005415 magnetization Effects 0.000 claims description 75
- 238000001514 detection method Methods 0.000 claims description 69
- 239000010408 film Substances 0.000 claims description 34
- 230000008859 change Effects 0.000 claims description 24
- 239000010409 thin film Substances 0.000 claims description 21
- 230000000694 effects Effects 0.000 claims description 13
- WABPQHHGFIMREM-UHFFFAOYSA-N lead(0) Chemical compound [Pb] WABPQHHGFIMREM-UHFFFAOYSA-N 0.000 claims 3
- 238000000034 method Methods 0.000 description 15
- 230000035945 sensitivity Effects 0.000 description 12
- 238000005259 measurement Methods 0.000 description 8
- 239000000758 substrate Substances 0.000 description 8
- 238000004519 manufacturing process Methods 0.000 description 6
- 238000004891 communication Methods 0.000 description 5
- 239000002184 metal Substances 0.000 description 5
- 230000005330 Barkhausen effect Effects 0.000 description 4
- 230000008878 coupling Effects 0.000 description 4
- 238000010168 coupling process Methods 0.000 description 4
- 238000005859 coupling reaction Methods 0.000 description 4
- 239000003990 capacitor Substances 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 230000004907 flux Effects 0.000 description 3
- 230000003993 interaction Effects 0.000 description 3
- 239000000696 magnetic material Substances 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 230000002159 abnormal effect Effects 0.000 description 2
- 230000005856 abnormality Effects 0.000 description 2
- 238000005229 chemical vapour deposition Methods 0.000 description 2
- 238000011423 initialization method Methods 0.000 description 2
- 238000010295 mobile communication Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 238000000206 photolithography Methods 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 238000004544 sputter deposition Methods 0.000 description 2
- 238000007740 vapor deposition Methods 0.000 description 2
- 229910018072 Al 2 O 3 Inorganic materials 0.000 description 1
- 229910018516 Al—O Inorganic materials 0.000 description 1
- 229910019236 CoFeB Inorganic materials 0.000 description 1
- 229910016525 CuMo Inorganic materials 0.000 description 1
- 229910015136 FeMn Inorganic materials 0.000 description 1
- 230000005355 Hall effect Effects 0.000 description 1
- 229910003271 Ni-Fe Inorganic materials 0.000 description 1
- 229910019041 PtMn Inorganic materials 0.000 description 1
- 230000005290 antiferromagnetic effect Effects 0.000 description 1
- QZPSXPBJTPJTSZ-UHFFFAOYSA-N aqua regia Chemical compound Cl.O[N+]([O-])=O QZPSXPBJTPJTSZ-UHFFFAOYSA-N 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 230000001413 cellular effect Effects 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 235000012489 doughnuts Nutrition 0.000 description 1
- 238000005530 etching Methods 0.000 description 1
- 230000001747 exhibiting effect Effects 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 230000005294 ferromagnetic effect Effects 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000003475 lamination Methods 0.000 description 1
- 230000010355 oscillation Effects 0.000 description 1
- 238000000059 patterning Methods 0.000 description 1
- 229910000889 permalloy Inorganic materials 0.000 description 1
- 238000007747 plating Methods 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
- 239000010453 quartz Substances 0.000 description 1
- 229920006395 saturated elastomer Polymers 0.000 description 1
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N silicon dioxide Inorganic materials O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 238000001039 wet etching Methods 0.000 description 1
Images


















Landscapes
- Measuring Magnetic Variables (AREA)
- Hall/Mr Elements (AREA)
Description
本発明は、薄膜磁気抵抗効果素子を用いた磁気センサに関する。 The present invention relates to a magnetic sensor using a thin film magnetoresistive element.
従来、この種の磁気センサとしては、磁気抵抗効果素子(MR素子)、磁気インピーダンス素子(MI素子)、フラックスゲートセンサ、半導体ホール効果センサ等が用いられている。このうち、近年開発されたMIセンサによれば、MI素子という磁気抵抗素子を用いることで薄膜化・小型化が容易なため、近年その改良も盛んである。また、MR素子の場合もこのMR素子に高周波電流を流した場合のその高周波インピーダンスの磁界による変化をもって磁界強度を検知することができる。 Conventionally, as this type of magnetic sensor, a magnetoresistive effect element (MR element), a magnetic impedance element (MI element), a fluxgate sensor, a semiconductor Hall effect sensor, and the like are used. Among these, recently developed MI sensors have been actively improved in recent years because they can be easily thinned and miniaturized by using magnetoresistive elements called MI elements. In the case of an MR element, the magnetic field strength can be detected by a change in the high frequency impedance caused by a magnetic field when a high frequency current is passed through the MR element.
このような磁気センサに対して、最近では、磁性薄膜層が絶縁層を介して複数層形成され、伝導に関わる電子がスピンを維持しながら絶縁層をトンネル現象によって伝導されることから、この際の磁化の状態によってトンネル透過係数が異なることを利用して磁界検知を行なう原理のトンネル型磁気抵抗効果素子(TMR素子)が提案されている。強磁性体トンネル効果は非常に高い磁場感度を有するため、超高密度磁気記録におけるHDD用磁気再生ヘッドとしての利用可能性がある。この他、モータ用磁界測定装置、ナビゲーション用地磁気センサ等の磁気センサや、いわゆるMRAMと称される磁気固体メモリデバイス等への利用も可能といえる。 Recently, for such a magnetic sensor, a plurality of magnetic thin film layers are formed via an insulating layer, and electrons related to conduction are conducted through the insulating layer by a tunnel phenomenon while maintaining spin. A tunnel type magnetoresistive element (TMR element) based on the principle of performing magnetic field detection utilizing the fact that the tunnel transmission coefficient differs depending on the state of magnetization of the magnetic field has been proposed. Since the ferromagnetic tunnel effect has a very high magnetic field sensitivity, it can be used as a magnetic reproducing head for HDD in ultra high density magnetic recording. In addition, it can be used for a magnetic sensor such as a magnetic field measuring device for a motor, a geomagnetic sensor for navigation, or a magnetic solid-state memory device called a so-called MRAM.
このようなTMR素子に関しては、静磁気相互作用の動作の向上を図った提案例がある(例えば、特許文献1参照)。 With respect to such a TMR element, there is a proposal example in which the operation of the magnetostatic interaction is improved (see, for example, Patent Document 1).
また、MR素子一般を方位計に用いる場合、磁界感度の鋭敏さとヒステリシスのために補助磁界を与えて高感度化を図るようにした提案例がある(例えば、特許文献2参照)。 In addition, when an MR element is generally used for an azimuth meter, there is a proposed example in which an auxiliary magnetic field is provided for high sensitivity due to the sharpness and hysteresis of magnetic field sensitivity (see, for example, Patent Document 2).
さらに、センス電流に関しては、従来からある巨大磁気抵抗効果素子(GMR素子)についても電流を膜面に平行に流すようにした提案例はある(例えば、特許文献2参照)。 Furthermore, with regard to the sense current, there is a proposal example in which a current is flowed in parallel with the film surface of a conventional giant magnetoresistive element (GMR element) (see, for example, Patent Document 2).
また、地磁気センサ方式例として、外部から補助磁界を与えることで検知感度を上げる例があり、中でも、補助磁界の極性を反転させる提案例がある(例えば、特許文献4参照)。 Further, as an example of the geomagnetic sensor system, there is an example in which the detection sensitivity is increased by applying an auxiliary magnetic field from the outside, and among them, there is a proposal example in which the polarity of the auxiliary magnetic field is reversed (see, for example, Patent Document 4).
ところが、特許文献1の場合、積層化により静磁気相互作用の動作の向上を図っているもので、本質的な解決法とはいえず、コスト高にもつながる対応策である。
However, in the case of
また、特許文献2に関しては、例えば方位センサを実現する上で、MR素子のように補助磁界を与えて高感度化を図るのもあまり得策とはいえない。
With respect to
特許文献3に関しては、TMR素子の場合にセンス電流を膜面に対して垂直として積極的にセンサデバイスの検知性能を上げ得るものではない。
With respect to
また、特許文献4の場合、外部磁界を与えるに際して、専用のコイル等が必要であり、その分、素子サイズが大きい、コイル作製に手間がかかり、コスト高となる等の欠点を有する。
In addition, in the case of
結局、これらの従来技術を考察した場合、地磁気方位センサ等のように微弱な磁界を検知する上で必要な磁界検知方法として、フラックスゲートセンサ、MIセンサ等が知られているが、何れも、薄膜部、バルク部で構成されている検知用素子部の外部検知性能は地磁気強度には遠く及ばず、外部コイルにより補助磁界を発生させることで検知することを原理としており、このような従来の磁気センサ類では、小型・軽量・低コスト化の点及び感度的な面でまだ十分とはいえず、改良の余地が多分にある。 Eventually, when considering these conventional techniques, flux gate sensors, MI sensors, etc. are known as magnetic field detection methods necessary for detecting a weak magnetic field such as a geomagnetic direction sensor. The external sensing performance of the sensing element composed of a thin film part and a bulk part is not far from the geomagnetic strength, and is based on the principle of detecting by generating an auxiliary magnetic field by an external coil. Magnetic sensors are not yet sufficient in terms of small size, light weight, low cost, and sensitivity, and there is much room for improvement.
特に、磁性薄膜が持っている保磁力程度かそれよりも小さな磁界変化時にも対応可能にしたい要求には対処できない現状にある。 In particular, it is in the present situation that it is not possible to cope with a demand to make it possible to cope with a change in magnetic field that is about the coercive force of a magnetic thin film or smaller.
そこで、本発明は、小型・軽量で地磁気程度の磁界オーダの微弱な磁界についても高感度に検知可能な磁気センサを提供することを目的とする。 SUMMARY OF THE INVENTION An object of the present invention is to provide a magnetic sensor that is small and light and can detect a weak magnetic field on the order of geomagnetism with high sensitivity.
特に、磁性薄膜が持っている保磁力程度かそれよりも小さな磁界変化時にも対応できる磁気センサを提供することを目的とする。 In particular, an object of the present invention is to provide a magnetic sensor that can cope with a change in magnetic field that is about the coercive force of a magnetic thin film or smaller.
併せて、このような磁気センサを利用することで地磁気検知等の精度を向上させることができ、ナビゲーションシステム等に有効な方位検知システム、携帯通信端末、磁気エンコーダ、磁気検知装置を提供することを目的とする。 In addition, by using such a magnetic sensor, it is possible to improve the accuracy of geomagnetic detection and the like, and to provide an azimuth detection system, a portable communication terminal, a magnetic encoder, and a magnetic detection device that are effective for a navigation system and the like. Objective.
特に、磁気エンコーダに関しては、従来の非接触型磁気エンコーダの限界である数1000パルス/回転(回転エンコーダの場合)を超えて高分解能化を実現することを目的とする。 In particular, with regard to the magnetic encoder, it is an object to realize high resolution exceeding the limit of several thousand pulses / rotation (in the case of a rotary encoder), which is the limit of the conventional non-contact type magnetic encoder.
本発明は、少なくとも磁界検知用軟磁性体層と磁化固定層とを含む磁性薄膜の積層構造を有して膜面に垂直にセンス電流を流すことにより前記磁界検知用軟磁性体層の磁化の変化を当該素子の抵抗値の違いとして検知する薄膜磁気抵抗効果素子を用いた磁気センサであって、前記磁界検知用軟磁性体層の磁化の変化の検知に、当該磁界検知用軟磁性体層の膜面内における所望の磁界方向の領域においてマイナーループ領域を含む領域を用い、前記磁化固定層と前記磁界検知用軟磁性体層の磁気異方性軸の方向とを互いに直角方向に設定した。そして、前記センス電流に直流消去用電流を付加する付加手段を設けた(請求項1)。あるいは、前記センス電流に交流消去用電流を付加する付加手段を設けた(請求項2)。あるいは、前記センス電流を流すための引き出し線の一部をバイパスさせて、当該引き出し線とこの引き出し線が引き出された一方の磁性薄膜との総抵抗値と、中間のトンネル層の抵抗値と、の差に見合うように、直流消去用電流又は交流消去用電流を付加する付加手段を設けた(請求項3)。 The present invention has a laminated structure of magnetic thin films including at least a magnetic field detecting soft magnetic layer and a magnetization fixed layer, and the magnetization of the magnetic field detecting soft magnetic layer is caused to flow by flowing a sense current perpendicularly to the film surface. A magnetic sensor using a thin film magnetoresistive effect element for detecting a change as a difference in resistance value of the element, wherein the magnetic field detecting soft magnetic layer is used to detect a change in magnetization of the magnetic field detecting soft magnetic layer. Using a region including a minor loop region in a region of a desired magnetic field direction in the film surface, the magnetization pinned layer and the magnetic anisotropy axis direction of the magnetic field detecting soft magnetic layer were set to be perpendicular to each other . An additional means for adding a DC erasing current to the sense current is provided. Alternatively, an adding means for adding an AC erasing current to the sense current is provided. Alternatively, by bypassing a part of the lead line for flowing the sense current, the total resistance value of the lead line and one magnetic thin film from which the lead line is drawn, and the resistance value of the intermediate tunnel layer, An additional means for adding a direct current erasing current or an alternating current erasing current is provided so as to meet the difference.
本発明によれば、基本的に、磁界検知用軟磁性体層の磁化の変化の検知に、当該磁界検知用軟磁性体層の膜面内における所望の磁界方向の領域においてマイナーループ領域を含む領域を用いるようにしたので、所望の磁化方位方向においてマイナーループ領域としても常に異方性磁界を受けることとなり、磁化回転モードによる磁化反転が主流となる磁気センサを提供することができ、よって、バルクハウゼンノイズの発生を抑制することができ、かつ、残留磁化自体の値を小さくすることができるので、相対的に磁化の変動がマイナーループ領域でも小さくすることができ、磁化のドリフトを小さくすることができる。よって、小型・軽量で地磁気程度の磁界オーダの微弱な磁界についても高感度に検知可能な磁気センサを提供することができる。この際、磁性薄膜が持っている保磁力程度かそれよりも小さな磁界変化時にも対応できる磁気センサを提供することができる。 According to the present invention, basically, the detection of the change in magnetization of the magnetic field detecting soft magnetic layer includes a minor loop region in the region of the desired magnetic field direction in the film surface of the magnetic field detecting soft magnetic layer. Since the region is used, an anisotropic magnetic field is always received as a minor loop region in a desired magnetization orientation direction, and a magnetic sensor in which magnetization reversal by the magnetization rotation mode is mainstream can be provided. Since the generation of Barkhausen noise can be suppressed and the value of remanent magnetization itself can be reduced, the fluctuation of magnetization can be relatively reduced even in the minor loop region, and the drift of magnetization can be reduced. be able to. Therefore, it is possible to provide a magnetic sensor that is small and lightweight and can detect a weak magnetic field on the order of geomagnetism with high sensitivity. At this time, it is possible to provide a magnetic sensor that can cope with a change in magnetic field that is about the coercive force of the magnetic thin film or smaller.
また、このような磁気センサを利用することで地磁気検知等の精度を向上させることができ、ナビゲーションシステム等に有効な方位検知システム、携帯通信端末、磁気エンコーダ、磁気検知装置を提供することができる。特に、磁気エンコーダに関しては、従来の非接触型磁気エンコーダの限界である数1000パルス/回転(回転エンコーダの場合)を超えて高分解能化を実現することができる。 Further, by using such a magnetic sensor, it is possible to improve the accuracy of geomagnetic detection and the like, and it is possible to provide an orientation detection system, a portable communication terminal, a magnetic encoder, and a magnetic detection device that are effective for a navigation system and the like. . In particular, with regard to the magnetic encoder, it is possible to achieve high resolution exceeding the limit of several thousand pulses / rotation (in the case of a rotary encoder), which is the limit of the conventional non-contact type magnetic encoder.
本発明を実施するための最良の形態(第二の実施の形態〜第七の実施の形態)について図面を参照して説明する。 The best mode for carrying out the present invention (second embodiment to seventh embodiment) will be described with reference to the drawings.
[第一の実施の形態]
第一の実施の形態を図1ないし図9に基づいて説明する。本実施の形態の磁気センサ1は、基本的には、図4に示すように、絶縁性の基板2上に積層させた硬磁性体層による磁化固定層3と、この磁化固定層3上に位置する絶縁層4と、絶縁層4を介して磁化固定層3上に位置する磁界検知用軟磁性体層5とよりなる。ここに、磁界検知用軟磁性体層5は、例えば複数に分割されることにより個別に設けられた磁界検知用の複数の個別磁性層5a〜5fとされており、磁化固定層3と各個別磁性層5a〜5fとの積層構造部分により複数のセンサ部6a〜6fが並列配置させた状態で形成されている。ここに、各センサ部6a〜6fとしては、金属磁性体層/非磁性体絶縁層/金属磁性体層の積層構造を含むトンネル型磁気抵抗効果素子(TMR素子)構造や磁性体層/非磁性体絶縁層/金属磁性体層の積層構造を含むCPP型巨大磁気抵抗効果素子(CPP型GMR素子)構造を採ることができ、何れにしても膜面に垂直にセンス電流を流すことにより磁界検知用軟磁性体層5の磁化の変化を当該磁気センサ1の抵抗値の違いとして検知する方式のものである。
[First embodiment]
A first embodiment will be described with reference to FIGS. As shown in FIG. 4, the
このような磁気センサ1に関する詳細構成をその作製方法を含めて順に説明する。まず、図1に示すような熱酸化膜11付きのSi基板等の基板2上に、磁化固定層3として、Co50Fe50膜を成膜し、図2に示すように所定のパターン、例えば、1本の短冊状形状にパターンニングする。この際、基板2としては石英基板、ガラス基板等の絶縁性の基板であってもよい。また、磁化固定層3としては、FeMn,PtMn,IrMn等の反強磁性膜上にCo50Fe50膜を成膜したスピンバルブ型などのPIN層の積層構造であってもよい(即ち、Co50Fe50膜なる磁性膜が後述の個別磁性層側に位置する)。この他、PIN層としては、セミハード磁性膜等を用いて形成したものでもよい。また、磁化固定層3としては、Co50Fe50膜に限らず、例えば、Co,Co85Cr15等であってもよく、他の磁性層(個別磁性層5a〜5f)より高保磁力膜となるように構成されていればよい。このような磁化固定層3の成膜法としては、スパッタリング法、蒸着法、CVD法を始めとして各種方法を用いることができる。そして、一般的な半導体作製工程に用いられるフォトリソグラフィ技術とCF4+H2を用いたRIEにより、磁化固定層3のパターンニングを行えばよい。この場合、ガス種としては他のものを用いてもよい。また、エッチング処理としては、ウェットエッチング法であってもよい。この場合、エッチング液として王水を用いればよい。また、メタルマスク等を用いて最初から所望の形に成膜させる手法を用いるようにしてもよい。これらのプロセスは、以下のプロセスに関しても同様に採用し得る。
The detailed structure regarding such a
次に、図3に示すように磁化固定層3上に絶縁層4を成膜する。ここに、センサ部6a〜6fがTMR素子構造の場合であれば、この絶縁層4としてはAl−O,Al2O3等により形成される。また、CPP型GMR素子構造の場合であれば絶縁層4に先立ち、非磁性金属膜が成膜される。
Next, an insulating
この後、図4に示すように、第3層として、磁化固定層3上に絶縁層4を介して、磁界検知用の軟磁性体層、Fe20−Ni80膜をスパッタリング法(めっき法、蒸着法、CVD法等でもよい)により成膜し、フォトリソグラフィ法により個別磁性層5a〜5fに短冊状に分割されるようにパターンニングする。この場合、Fe20−Ni80膜以外に、Ni−Fe膜、CuMoパーマロイ膜、CoFeBアモルファス膜、FeSiCoBアモルファス薄膜等でもよい。何れにしても、比較的低保磁力の膜構成であれば、個別に感じる個別磁性層5a〜5fを並列配置させることが可能であり、センサ部6a〜6fを並列配置させて形成することができる。
After that, as shown in FIG. 4, as a third layer, a soft magnetic layer for detecting a magnetic field and an Fe20-Ni80 film are formed on the fixed
なお、このような磁気センサ1の積層構造に関して、その積層順序は上下逆とし、例えば、個別磁性層5a〜5f側を先に成膜・パターンニングして形成するようにしてもよい。
In addition, regarding the laminated structure of such a
また、このような磁気センサ1を用いた、より実際的な検出方式としては、図5に示すように各々電極としても機能する個別磁性層5a〜5fに対して磁化固定層3との間には直流電源12が接続されているとともに、各個別磁性層5a〜5fに対してスイッチング回路13を介して電圧計14が接続されており、各センサ部6a〜6f毎に膜面に垂直方向に電流を流した場合の電圧変化を、スイッチング回路13のスイッチング動作により各センサ部6a〜6f毎に電圧計14で検知する検知方式とされている。このような検知動作において、センサ部6a〜6fに対しては検知対象となる磁界発生手段からの磁界が印加される。即ち、例えば後述するような磁気エンコーダの場合であれば、各センサ部6a〜6fに対応するエンコーダからの外部磁界が印加される(実際は、個別磁性層5a〜5fに局所的に作用する)。もっとも、スイッチング回路13を用いる方式に代えて、図6に示すように、電圧計アレイ15を用いることで各センサ部6a〜6fに発生した電圧を個別に検知するようにしてもよい。
Further, as a more practical detection method using such a
このような磁気センサ1を例に、本発明の磁気センサの原理について説明する。まず、磁界検知用軟磁性体層5には成膜時に異方性を付けており、その磁化困難軸方向の磁化曲線としては異方性磁界が付与され、0.1〜0.15Oe程度の大きさの磁界を持つ。この場合、異方性磁界に対して充分小さな保磁力を示しており、成膜条件を選べば、所望の磁界、例えば地磁気強度以下とすることも可能である。しかしながら、量産時においては、できるだけ緩やかな目標値とすることで低コスト化につながる面があるので、たとえ地磁気強度かやや保磁力が大きな領域においても、動作可能な構造を持つセンサを検討したところ、可能となることが実験を経て確認された。即ち、従来用いられている方位センサのように水平面を仮の基準面として測定に供する際の実際の角度を水平面より傾けた場合には、センサへはその都度の測定時における地磁気強度のベクトル各成分強度はその射影分相当である0.05〜0.5Oe程度となるのが通常である。そこで、本発明は、このような磁界強度程度かそれより保磁力が大きな磁界検知用軟磁性体層5を有する磁気センサ1に関するものである。
Taking the
このような微小な磁界検知を行うことで、例えば、磁性インクを用いた印字物検知や磁気エンコーダの高パルス化が可能となる。 By performing such a minute magnetic field detection, for example, it is possible to detect a printed matter using magnetic ink and increase the pulse of the magnetic encoder.
また、PIN層(磁化固定層3)と磁界検知用軟磁性体層5の磁気異方性軸の方向とを互いに直角方向に設定した場合、磁界検知用軟磁性体層5へはPIN層(磁化固定層3)からの交換相互作用や静磁気エネルギーによる影響(結合磁界の影響)があるので、磁界検知用軟磁性体層5には、当該磁界検知用軟磁性体層5自体の磁気異方性軸に対して、ほぼ直角方向にも異方性磁界を受けることとなり、2軸的な磁化容易軸を持つこととなる。従って、残留磁化はどの方向においても、1軸異方性における磁化容易方向の残留磁化は発生せず、小さな値となる。従って、本実施の形態の磁気センサ1においては、磁界検知用軟磁性体層5の磁化の変化の初期値は、バイアス磁界によって設定することができ、この場合のバイアス磁界としては、磁化固定層3からの静磁気結合磁界、交換結合磁界等の結合磁界を利用することができる。本発明は、基本的にこのような性質を利用するものである。
When the direction of the magnetic anisotropy axis of the PIN layer (magnetization pinned layer 3) and the magnetic field detecting soft
そこで、本発明の磁気センサ1の場合の磁気ヒステリシス曲線の一例を図7に示し、参考として従来の磁気センサの場合の磁気ヒステリシス曲線の一例を図8に示す。まず、図7は、磁気センサ1をサンプルとする場合の磁界変化に対する磁気特性として、実線は磁化困難軸方向の磁気ヒステリシスループを示し、破線は磁化容易軸方向の磁気ヒステリシスループを示す。実線の磁気ヒステリシスループは飽和磁気曲線を示しており、マイナーループはこの内側の領域となり、破線の磁気ヒステリシスループはマイナーループとなる。ここに、マイナーループ(minor loop)とは、外部磁界を磁性体の飽和磁化まで印加し、飽和磁化曲線に対してその磁化曲線の途中で磁界を変えることにより描かれる小さなヒステリシスループを意味する。従来例を示す図8においても、実線は磁化困難軸方向の磁気ヒステリシスループを示し、破線は磁化容易軸方向の磁気ヒステリシスループを示す。ここに、図7と図8との対比からも明らかなように、本発明の場合と従来例とで異なるのは、破線で示す磁化容易軸方向の磁気ヒステリシスループの特性であり、本発明の場合、多少なりとも傾きを持ち、見掛け上、磁化容易軸方向においても異方性磁界があるような磁化曲線とされている。即ち、磁界検知用軟磁性体層5の磁化の変化の検知に、当該磁界検知用軟磁性体層5の膜面内における所望の磁化方向の領域においてマイナーループ領域を含む領域を用いる構成とされている。
An example of the magnetic hysteresis curve in the case of the
本発明では、このような磁化状態と、PIN層(磁化固定層3)との磁化の相対角度の差によって、磁気センサ1としての感度差が得られ、磁化の磁界方向への追従性から方向を確定できるものである。また、図8に示す従来例の場合、破線で示す磁化容易軸方向の磁気ヒステリシスループの特性によれば、磁化容易軸方向の0磁界付近で磁化のジャンプが生じやすく、これがバルクハウゼンノイズの原因となりやすいのに対して、図7に示すような本実施の形態によれば、マイナーループ領域を利用するため、たとえ磁化容易軸方向の0磁界付近においても磁化のジャンプは生じにくく、バルクハウゼンノイズは発生し難い。さらには、何らかの原因で図7、図8中に一点鎖線で示すようなバイアス磁界がある場合でも、本実施の形態の場合にはマイナーループ領域上にあり問題なく動作可能であるのに対して、従来例では、場合によっては磁化飽和が生じてしまい、センサとして機能しないこととなってしまう。
In the present invention, a sensitivity difference as the
結局、本発明の磁気センサ1によれば、所望の磁化方位方向においてマイナーループ領域としても常に異方性磁界を受けているため、磁化回転モードによる磁化反転が主流であって、バルクハウゼンノイズの少ないものとなる。また、残留磁化自体の値を小さくできるので、相対的に磁化の変動がマイナーループ領域でも小さくできるため、磁化のドリフトを小さくすることができる。
After all, according to the
ところで、磁気センサ1を2個一組として、異方性の向きを90度異なるように設置した場合の出力例(規格化出力)を図9に示す。位相差が丁度印加磁界のセンサに対する角度において90度ずれるように出力が得られており、角度センサとして機能し得ることが判る。また、地磁気方位センサとしても十分に機能し、磁界の方向を検知するセンサ、さらには、例えば微小磁石と本発明の磁気センサとの相対位置を検知する用途への適用も可能であり、磁気的なリニアエンコーダ、ロータリエンコーダ等としても利用可能である。
By the way, FIG. 9 shows an output example (standardized output) in the case where two
[第二の実施の形態]
第二の実施の形態を図10ないし図13に基づいて説明する。第一の実施の形態で示した部分と同一部分は同一符号を用いて示し、説明も省略する(以降の実施の形態でも同様とする)。
[Second Embodiment]
A second embodiment will be described with reference to FIGS. The same parts as those shown in the first embodiment are denoted by the same reference numerals, and description thereof is also omitted (the same applies to the following embodiments).
TMR素子等の磁気抵抗効果素子に流す検知に必要なセンス電流の与え方によって、磁界検知用軟磁性体層5の初期状態は変化し得るので、これを直流(DC)の変化を利用して初期化を行うようにしたものである。
The initial state of the magnetic field detecting soft
図10は本実施の形態の磁気センサ1の構成例を示し、(a)は概略平面図、(b)はそのセンサ部分の概略断面図である。
FIG. 10 shows a configuration example of the
まず、本実施の形態の磁気センサ1は、磁気抵抗効果素子としてTMR素子(トンネル型磁気抵抗効果素子)をセンサ部6に用いたものであり、基本的には、絶縁性の基板2上に磁化固定層(磁性体層)3、非磁性体の絶縁層(トンネル層)4、磁界検知用軟磁性体層(磁性体層)5を各々所定パターンの薄膜構成で順次積層させた構成とされている。ここに、磁性体層3,5は電極としても機能し、磁性体層3から絶縁層4を介して磁性体層5にトンネル電流が流れる構造とされている。また、磁性体層3,5は各々保磁力が異なり、例えば、磁性体層3が中程度の保磁力を持つのに対して、磁性体層5は、磁化反転容易な保磁力を有する層として、他層に比べて低い保磁力を持たせてなる。これにより、印加される外部磁界によってこれらの磁化状態を所望のものとすることにより、目的の磁界強度を検知し得る磁気センサ1として利用可能なものである。
First, the
このようなTMR素子によるセンサ部6に対して、電極として機能する磁性体層3,5の一端間には検知用電流を流すための電源21が接続され、磁性体層3,5の他端間にはTMR素子の出力電圧を検出するための電圧計22が接続されている。ここに、電源21は、直流電源23と、この直流電源23から磁性体層3,5間に流す検知用電流(センス電流)の向きを磁性体層3側から磁性体層5側、磁性体層5側から磁性体層3側となるように交互に反転切換えする電流極性切換手段24とにより構成されている。
A
このような構成において、磁性体層3側から絶縁層4を介して磁性体層5側に、又は、磁性体層5側から絶縁層4を介して磁性体層3側に、直流のトンネル電流を検知用電流として流した場合に、磁性体層3,5間に生ずる出力電圧の変化を電圧計22により検出する。このように磁界検知動作において、TMR素子に流す検知用電流の向きを電流極性切換手段24により交互に反転切換えし、各々の向きの検知用電流を流したときに電圧計22により検出される出力電圧の平均値をとることにより検知用電流が発生する磁界の影響による誤差を少なくして磁界検知が可能となる。よって、磁界検知の高感度化を外部コイルなしに簡単に実現することができる。
In such a configuration, a direct current tunnel current flows from the
ここに、検知用電流として印加するDC電流値による磁界で、図11に示すように、磁化状態も変化する。従って、本実施の形態では、センス電流の変化をもって初期化を行う態様として、測定開始の初期にはDC電流値によるA0値の磁界を磁性体層3,5間に与え(直流消去用電流の付加手段)、通常の測定時の測定値B0はマイナーループ領域であり、それよりも小さいと考えられるので、磁性体層(磁界検知用軟磁性体層)5の初期状態を一定にすることができる。
Here, as shown in FIG. 11, the magnetization state also changes due to the magnetic field generated by the DC current value applied as the detection current. Therefore, in this embodiment, as an aspect in which the initialization is performed by changing the sense current, a magnetic field of A0 value based on the DC current value is applied between the
なお、DC電流を利用して初期化する方式に限らず、図12に示すようにAC電流値を設定することでAC電流の変化を利用して初期化を行うようにしてもよい。即ち、AC電流値の最大値A1(±両極性)の磁界とした後、徐々にAC電流値を小さくしていくことで(交流消去用電流の付加手段)、バイアス電流値による磁界をほぼ0に初期化することができる。到達磁界は測定値B1となる。 Note that the initialization is not limited to the method using the DC current, and the initialization may be performed using the change in the AC current by setting the AC current value as shown in FIG. That is, after setting the magnetic field of the AC current value to the maximum value A1 (± bipolarity), gradually reducing the AC current value (adding means for AC erasing current), the magnetic field due to the bias current value is almost zero. Can be initialized to The reaching magnetic field is the measured value B1.
この時の抵抗値を測定結果とすることで、高精度な磁気センサ1とすることができる。
By using the resistance value at this time as a measurement result, a highly accurate
ところで、本実施の形態の磁気センサ1では、磁化容易軸方向の磁気ヒステリシスループに関してもマイナーループを利用するわけであるが、このようなマイナーループを利用するメリットとしては図13に示すようにも考えられる。即ち、マイナーループであり、かつ、磁化状態によって磁化反転していることとなるため、測定対象である外部磁界強度が飽和に達していない状態では、初期値は動かないと考えてよい(飽和磁化量が小さい)。
By the way, in the
一方、外部磁界強度が大きくて飽和に達した場合、残留磁化状態が極わずかであるが、変動するので、センス電流の初期値により、発生させた磁界によって残留磁化量の初期値を決めてやれば、その後は、マイナーループ型であるので、微小磁界に対して充分な検知性能を発揮し、かつ、ダイナミックレンジをさらに大きくすることができる。 On the other hand, when the external magnetic field strength is large and reaches saturation, the residual magnetization state is very slight but fluctuates, so the initial value of the residual magnetization can be determined by the generated magnetic field based on the initial value of the sense current. After that, since it is a minor loop type, sufficient detection performance can be exhibited with respect to a minute magnetic field, and the dynamic range can be further increased.
なお、磁気センサ1におけるTMR素子等のセンサ部6に関して、磁性薄膜(磁性体層3,5)の少なくとも1層、例えば、磁性体層5の平面形状は、例えば図14に示すように、楕円形状として形成してもよい。これによれば、磁性体層5の平面形状を矩形短冊状とした場合に比べ、楕円形状とすることで、その形状異方性に伴う磁気異方性の影響を少なくすることができ、磁界の方向検知に関してより一層高感度化を図ることが可能となる。
Regarding the
なお、磁性体層5の平面形状としては楕円形状に限らず、真円形状等を含む円形形状であればよく、或いは、ドーナツ形状であってもよい。
The planar shape of the
[第三の実施の形態]
第三の実施の形態を図15に基づいて説明する。本実施の形態は、基本的には第二の実施の形態の初期化方式に準ずるが、その消去の仕方として、例えば図15に示すように、磁性体層5に電流を流す際に、本来縦型(膜面に垂直)に流れるセンス電流(矢印a)を流すための引き出し線25の一部をバイパスさせて(矢印b)、当該引き出し線25と磁性体層5との総抵抗値と絶縁層(トンネル層)4の抵抗値との差を考慮し、この差に見合うようにDC消去用電流又はAC消去用電流を付加するようにしたものである(付加手段)。これにより、より精密にバイアス磁界を発生させることができる。
[Third embodiment]
A third embodiment will be described with reference to FIG. This embodiment basically conforms to the initialization method of the second embodiment, but as an erasing method, for example, as shown in FIG. By bypassing a part of the lead line 25 (arrow b) for flowing a sense current (arrow a) flowing in the vertical type (perpendicular to the film surface) (arrow b), the total resistance value of the lead line 25 and the
[第四の実施の形態]
第四の実施の形態を図16に基づいて説明する。本実施の形態は、前述した各実施の形態のような磁気センサ1を利用して構成した地磁気検知の方位検知システムへの適用例を示す。まず、例えば2つの磁気センサ1a,1bをxyz3軸ベクトルの方向中の任意の2面(x,y軸でもよく、y,z軸でもよく、z,x軸でもよい)=直交平面上に独立して配置させた地磁気センサ31が設けられている。これらの磁気センサ1a,1bの検知出力はデータ取り込み部32を介して検知手段としての3磁気成分検知部33に入力されている。この3磁気成分検知部33は地磁気検知に関して、磁気センサ1a,1bの検知出力に基づき3軸ベクトル成分を検知する。一方、データ取り込み部32を介して取り込まれた磁気センサ1a,1bの検知出力に関してその絶対値を算出する絶対値演算部34と、この絶対値演算部34により算出された絶対値の大きさを予め設定されている比較地磁気強度に測定マージンを加味した閾値と比較する比較部35とによる異常検知手段36が設けられている。比較部35では算出された絶対値の大きさが閾値を超えている場合に検知結果に異常があると判断する。この比較部35の出力側には異常検知出力に基づき動作する報知手段としての警報部37が設けられている。
[Fourth embodiment]
A fourth embodiment will be described with reference to FIG. The present embodiment shows an application example to an azimuth detection system for geomagnetic detection configured using the
これにより、本実施の形態の方位検知システムによれば、通常は、地磁気の3軸のベクトル検知には3個以上のTMR素子が必要であるが、1素子で同一平面内の2軸のベクトル検知が可能な前述の実施の形態の磁気センサを利用することで、2つのTMR素子6(磁気センサ1a,1b)を異なる直交平面上に配置させるだけの極めて簡単な構成で3軸のベクトル検知を実現することができる。
Thus, according to the azimuth detection system of the present embodiment, normally, three or more TMR elements are required for geomagnetic three-axis vector detection, but one element is a two-axis vector in the same plane. By using the magnetic sensor of the above-described embodiment capable of detection, three-axis vector detection with an extremely simple configuration in which two TMR elements 6 (
また、測定済みの地磁気強度に測定マージンを加味して予め設定されている閾値を超えるような大きさの検知結果が得られた場合には、警報部37を通じて測定値に異常がある旨を報知するので、誤った検知結果の利用を未然に防止できる。なお、より実際的には、3磁気成分検知部33から得られる検知結果とともに、この警報部37の出力も通信部38を通じて当該システムの使用者に通信によって通知するシステム構成とすればよい。これにより、GPSシステムや後述の携帯電話等の通信システムのようなビジネス形態に利用することも可能となる。
In addition, if a detection result with a magnitude exceeding a preset threshold is obtained by adding a measurement margin to the measured geomagnetic intensity, an
[第五の実施の形態]
第五の実施の形態を図17に基づいて説明する。本実施の形態は、前述したような磁気センサ1を利用して構成したGPS対応の携帯通信端末としての携帯電話41への適用例を示す。図17は携帯電話41の外観構成を示す概略正面図で、種々の構成例があるが、一例としてマイク部42、入力操作部43、スピーカ部44、LCD等による表示部45等を備え、ヒンジ部46により2つ折り構造とされている。
[Fifth embodiment]
A fifth embodiment will be described with reference to FIG. This embodiment shows an application example to a mobile phone 41 as a GPS-compatible mobile communication terminal configured using the
このような基本的な構成に加え、本実施の形態では、GPS機能を発揮させるための地磁気の方位検知に利用する磁気センサ1が表示部45の裏面側に埋め込まれることにより搭載されている。磁気センサ1中、例えば、6はTMR素子相当部分であり、48は制御用CPU等の信号処理・制御部相当部分である。
In addition to such a basic configuration, in the present embodiment, the
従って、携帯電話41等の実装面積が限られた携帯通信端末に関して、方位検知用の磁気センサ1を備えるGPS対応の機種の場合でもその実装面積の低減が見込まれる。特に、表示部45の裏面側に埋め込み実装しているので、本実施の形態のような折り畳みタイプの携帯電話41の場合であっても、表示面に近接又は一体化されるので、誤差が少なくなる。
Therefore, regarding a mobile communication terminal having a limited mounting area such as the mobile phone 41, the mounting area can be reduced even in the case of a GPS compatible model including the
[第六の実施の形態]
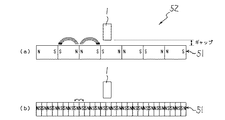
第六の実施の形態を図18に基づいて説明する。本実施の形態は、前述したような磁気センサ1と、所定のギャップを介してこの磁気センサ1の近傍に配置された磁界発生手段として交互に磁極の極性を反転させた磁性体51とを備え、磁気センサ1によって磁性体51による磁界を検知しその変化分を計数するタイプの磁気エンコーダ52への適用例を示す。即ち、前述したような磁気センサ1によれば、磁性体51との相対運動を磁界の強度の差として検知する磁気エンコーダ52として用いることは充分可能である。
この場合、低磁界に対する感度を増加させることができ、磁性体51が着磁された測定対象となる媒体の磁界強度が小さくても充分機能する。
[Sixth embodiment]
A sixth embodiment will be described with reference to FIG. The present embodiment includes the
In this case, the sensitivity to a low magnetic field can be increased, and it functions sufficiently even if the magnetic field strength of the medium to be measured with the
ここに、高パルス分解能の場合には、磁気センサ1を近接させないと媒体からの磁界は磁束が綴じてしまうので、同一ギャップでは検知に有効な磁束量は低下してしまう。磁界強度の低下によって磁気センサ1を充分飽和させることなしに機能させる場合でも本発明は有効であり、高パルス分解能の磁気エンコーダへの適応に向く。
Here, in the case of high pulse resolution, if the
なお、図18(a)は磁界強度大、媒体パルス数小の場合への適用例を示し、図18(b)は磁界強度小、媒体パルス大の場合への適用例を示す。 FIG. 18A shows an application example when the magnetic field strength is large and the number of medium pulses is small, and FIG. 18B shows an application example when the magnetic field strength is small and the medium pulse is large.
[第七の実施の形態]
第七の実施の形態を図19に基づいて説明する。本実施の形態は、共振回路61と信号処理部62とを備える磁気検知装置63に関して、キャパシタC成分(又は、インダクタンスL成分)を持つ外部素子64とともに、前述したような磁気センサ1を共振回路61中に配置させたものである。図示例では、共振回路61は、例えばキャパシタC成分が固定の外部素子64と磁気センサ1との組合せにより抵抗成分Rが可変のCR共振回路構成とされている。つまり、磁気センサ1のTMR素子等のセンサ部6を磁界強度に応じて可変する抵抗成分Rとし、外部素子64のキャパシタC成分(又は、インダクタ成分L)とでCR共振回路(又は、CL共振回路)を構成し、その発振周波数の変化により磁界強度を検知するものである。
[Seventh embodiment]
A seventh embodiment will be described with reference to FIG. The present embodiment relates to a
即ち、共振回路61中に前述したような磁気センサ1を設ける際に、その動作領域がマイナーループであっても充分に機能する。また、磁気センサ1に共振時に高周波の交互電流が流れることから、磁気センサ1の一部に交流磁界が働き、磁気センサ1の磁化曲線は一定のループを描くこととなる。このため、さらにドリフトの少ない磁気検知装置63を実現できる。
That is, when the
1 磁気センサ
3 磁性薄膜
5 磁界検知用軟磁性体層
6 薄膜磁気抵抗効果素子
12 付加手段
33 検知手段
36 異常検知手段
37 報知手段
45 表示部
52 磁気エンコーダ
61 共振回路
63 磁気検知装置
64 外部素子
DESCRIPTION OF
Claims (3)
前記磁界検知用軟磁性体層の磁化の変化の検知に、当該磁界検知用軟磁性体層の膜面内における所望の磁界方向の領域においてマイナーループ領域を含む領域を用い、
前記磁化固定層と前記磁界検知用軟磁性体層の磁気異方性軸の方向とを互いに直角方向に設定し、
前記センス電流に直流消去用電流を付加する付加手段を備える、
ことを特徴とする磁気センサ。 A magnetic thin film layered structure including at least a magnetic field detection soft magnetic layer and a magnetization fixed layer, and a change in magnetization of the magnetic field detection soft magnetic layer by flowing a sense current perpendicular to the film surface. A magnetic sensor using a thin film magnetoresistive effect element that detects a difference in resistance value of
Using a region including a minor loop region in a desired magnetic field direction region in the film surface of the magnetic field detection soft magnetic layer for detecting the change in magnetization of the magnetic field detection soft magnetic layer,
The direction of the magnetic anisotropy axis of the magnetization fixed layer and the magnetic field detecting soft magnetic layer is set in a direction perpendicular to each other ,
Adding means for adding a DC erasing current to the sense current;
Magnetic sensor characterized by the above .
前記磁界検知用軟磁性体層の磁化の変化の検知に、当該磁界検知用軟磁性体層の膜面内における所望の磁界方向の領域においてマイナーループ領域を含む領域を用い、
前記磁化固定層と前記磁界検知用軟磁性体層の磁気異方性軸の方向とを互いに直角方向に設定し、
前記センス電流に交流消去用電流を付加する付加手段を備える、
ことを特徴とする磁気センサ。 A magnetic thin film layered structure including at least a magnetic field detection soft magnetic layer and a magnetization fixed layer, and a change in magnetization of the magnetic field detection soft magnetic layer by flowing a sense current perpendicular to the film surface. A magnetic sensor using a thin film magnetoresistive effect element that detects a difference in resistance value of
Using a region including a minor loop region in a desired magnetic field direction region in the film surface of the magnetic field detection soft magnetic layer for detecting the change in magnetization of the magnetic field detection soft magnetic layer,
The direction of the magnetic anisotropy axis of the magnetization fixed layer and the magnetic field detecting soft magnetic layer is set in a direction perpendicular to each other,
Adding means for adding an AC erasing current to the sense current;
Magnetic sensor characterized by the above .
前記磁界検知用軟磁性体層の磁化の変化の検知に、当該磁界検知用軟磁性体層の膜面内における所望の磁界方向の領域においてマイナーループ領域を含む領域を用い、
前記磁化固定層と前記磁界検知用軟磁性体層の磁気異方性軸の方向とを互いに直角方向に設定し、
前記センス電流を流すための引き出し線の一部をバイパスさせて、当該引き出し線とこの引き出し線が引き出された一方の磁性薄膜との総抵抗値と、中間のトンネル層の抵抗値と、の差に見合うように、直流消去用電流又は交流消去用電流を付加する付加手段を備える、
ことを特徴とする磁気センサ。 A magnetic thin film layered structure including at least a magnetic field detection soft magnetic layer and a magnetization fixed layer, and a change in magnetization of the magnetic field detection soft magnetic layer by flowing a sense current perpendicular to the film surface. A magnetic sensor using a thin film magnetoresistive effect element that detects a difference in resistance value of
Using a region including a minor loop region in a desired magnetic field direction region in the film surface of the magnetic field detection soft magnetic layer for detecting the change in magnetization of the magnetic field detection soft magnetic layer,
The direction of the magnetic anisotropy axis of the magnetization fixed layer and the magnetic field detecting soft magnetic layer is set in a direction perpendicular to each other,
The difference between the total resistance value of the lead wire and one of the magnetic thin films from which the lead wire is drawn and the resistance value of the intermediate tunnel layer is bypassed by a part of the lead wire for flowing the sense current. In order to meet the requirements, an additional means for adding a DC erasing current or an AC erasing current is provided.
Magnetic sensor characterized by the above .
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004029657A JP4331630B2 (en) | 2004-02-05 | 2004-02-05 | Magnetic sensor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004029657A JP4331630B2 (en) | 2004-02-05 | 2004-02-05 | Magnetic sensor |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005221383A JP2005221383A (en) | 2005-08-18 |
| JP4331630B2 true JP4331630B2 (en) | 2009-09-16 |
Family
ID=34997136
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004029657A Expired - Fee Related JP4331630B2 (en) | 2004-02-05 | 2004-02-05 | Magnetic sensor |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4331630B2 (en) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2007086581A1 (en) * | 2006-01-30 | 2007-08-02 | Kyocera Corporation | Mobile electronic device and its direction display method |
| JP5055030B2 (en) * | 2007-06-13 | 2012-10-24 | 株式会社リコー | Magnetic sensing device |
| JP5233201B2 (en) * | 2007-08-09 | 2013-07-10 | Tdk株式会社 | Magnetic device and frequency detector |
| JP2009192429A (en) * | 2008-02-15 | 2009-08-27 | Tdk Corp | Magnetic sensor and magnetic field strength measurement method |
| US10816615B2 (en) | 2017-05-19 | 2020-10-27 | Asahi Kasei Microdevices Corporation | Magnetic sensor |
| EP3470861B1 (en) * | 2017-10-10 | 2019-11-27 | Melexis Technologies SA | Redundant sensor fault detection |
| US11002806B2 (en) | 2018-03-29 | 2021-05-11 | Asahi Kasei Microdevices Corporation | Magnetic field detection device |
| CN110108781B (en) * | 2019-05-15 | 2023-11-10 | 中钞印制技术研究院有限公司 | Mobile device, article authentication method, apparatus and system thereof, and storage medium |
-
2004
- 2004-02-05 JP JP2004029657A patent/JP4331630B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005221383A (en) | 2005-08-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4433820B2 (en) | Magnetic detection element, method of forming the same, magnetic sensor, and ammeter | |
| US8552720B2 (en) | Mobile information terminal apparatus and magnetic sensor, including magnetoresistive detecting device | |
| US7808749B2 (en) | Magnetoresistance effect element, substrate therefor and manufacturing method thereof | |
| KR100687513B1 (en) | Thin-film magnetic field sensor | |
| WO2015033464A1 (en) | Magnetic sensor element | |
| JP2009535616A (en) | Thin film type triaxial fluxgate and manufacturing method thereof | |
| JP2009204435A (en) | Thin-film magnetometric sensor | |
| JP6842741B2 (en) | Magnetic sensor | |
| JP2003008101A (en) | Tunneling magnetoresistive effect element and bearing detecting system using the same | |
| EP3236276B1 (en) | Magnetic field sensor with multiple axis sense capability | |
| JP2006269955A (en) | Magnetic field detecting device | |
| JP4790448B2 (en) | Magnetoresistive element and method for forming the same | |
| JP2007024598A (en) | Magnetic sensor | |
| JP4331630B2 (en) | Magnetic sensor | |
| JP4833691B2 (en) | Magnetic sensor and manufacturing method thereof | |
| JP4084036B2 (en) | Magnetic sensor and orientation detection system using the magnetic sensor | |
| JP5660826B2 (en) | Magnetoresistive element, magnetic field detector, position detector, rotation detector and current detector using the same | |
| JP4575602B2 (en) | Magnetic sensing element | |
| JP4316836B2 (en) | Magnetic sensor | |
| JP2004184150A (en) | Magnetic detecting device, direction detection system, and portable communication terminal | |
| JPH11195824A (en) | Magnetoresistance effect element and magnetoresistance effect type head | |
| JP2004045119A (en) | Magnetic sensor, azimuth detection system using the same, and mobile communication terminal | |
| JP4954317B2 (en) | Magnetic sensing element and azimuth sensing system using this element | |
| JP2006253411A (en) | Magnetic sensor | |
| US20240103100A1 (en) | Yoke structures for improved magnetometer performance |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060913 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090203 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090205 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090323 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090408 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090529 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090616 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090618 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120626 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120626 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150626 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150626 Year of fee payment: 6 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R360 | Written notification for declining of transfer of rights |
Free format text: JAPANESE INTERMEDIATE CODE: R360 |
|
| R360 | Written notification for declining of transfer of rights |
Free format text: JAPANESE INTERMEDIATE CODE: R360 |
|
| R371 | Transfer withdrawn |
Free format text: JAPANESE INTERMEDIATE CODE: R371 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |