JP4263134B2 - Control device for movable part drive mechanism - Google Patents
Control device for movable part drive mechanism Download PDFInfo
- Publication number
- JP4263134B2 JP4263134B2 JP2004120533A JP2004120533A JP4263134B2 JP 4263134 B2 JP4263134 B2 JP 4263134B2 JP 2004120533 A JP2004120533 A JP 2004120533A JP 2004120533 A JP2004120533 A JP 2004120533A JP 4263134 B2 JP4263134 B2 JP 4263134B2
- Authority
- JP
- Japan
- Prior art keywords
- control
- disturbance
- cam phase
- control input
- valve lift
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images












































Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/10—Internal combustion engine [ICE] based vehicles
- Y02T10/12—Improving ICE efficiencies
Landscapes
- Output Control And Ontrol Of Special Type Engine (AREA)
- Combined Controls Of Internal Combustion Engines (AREA)
- Feedback Control In General (AREA)
Description
本発明は、内燃機関の可動部の動作タイミングおよび動作量の少なくとも一方を変更するとともに、内燃機関の運転に伴って振幅が周期的に変化する周期的外乱が加えられる可動部駆動機構の制御装置に関する。 The present invention relates to a control device for a movable part drive mechanism in which at least one of an operation timing and an operation amount of a movable part of an internal combustion engine is changed, and a periodic disturbance whose amplitude periodically changes with the operation of the internal combustion engine is applied. About.
従来、内燃機関の可動部の動作タイミングおよび動作量の少なくとも一方を変更する可動部駆動機構の制御装置として、特許文献1に記載されたものが知られている。この可動部駆動機構は、吸気カムシャフトすなわち吸気カムのクランクシャフトに対する位相(以下「カム位相」という)を自在に変化させることにより、吸気弁のバルブタイミングを変化させるものであり、油圧駆動式の可変カム位相機構と、これにオイルポンプからの油圧を供給する電磁制御弁などで構成されている。また、制御装置は、クランクシャフトおよび吸気カムの角度位置に相当する信号をそれぞれ検出するクランク角センサおよびカム角センサと、これらのセンサの検出信号が入力されるコントローラとを備えている。
2. Description of the Related Art Conventionally, a control device for a movable part drive mechanism that changes at least one of the operation timing and the operation amount of a movable part of an internal combustion engine is disclosed in
このコントローラは、クランク角センサおよびカム角センサの検出信号に基づいて実際のカム位相を算出し、内燃機関の運転状態に基づいて目標カム位相を算出するとともに、以下に述べるように、スライディングモード制御アルゴリズムにより、カム位相を目標カム位相に収束させるように、可変カム位相機構を制御する。すなわち、電磁制御弁への制御信号を制御入力とし、カム位相を出力とする系を、制御対象として見なすとともに、この制御対象を連続時間系モデルとしてモデル化する。具体的には、制御対象の状態方程式を、カム位相の一次および二次の時間微分値を状態変数とする微分方程式として設定する。さらに、スライディングモード制御アルゴリズムにおける切換関数を、目標カム位相とカム位相との偏差、およびその時間微分値(すなわち変化速度)を状態変数とする線形関数として設定する。そして、以上のように設定した切換関数の状態変数である偏差およびその変化速度が切換直線上に載るように制御入力を算出することによって、すなわち偏差およびその変化速度が切換直線上をスライディングし、値0に収束するように制御入力を算出することによって、カム位相が目標カム位相に収束するように制御される。
This controller calculates the actual cam phase based on the detection signals of the crank angle sensor and the cam angle sensor, calculates the target cam phase based on the operating state of the internal combustion engine, and, as described below, sliding mode control The variable cam phase mechanism is controlled by an algorithm so that the cam phase converges to the target cam phase. That is, a system in which a control signal to the electromagnetic control valve is a control input and a cam phase is output is regarded as a control target, and the control target is modeled as a continuous time system model. Specifically, the state equation to be controlled is set as a differential equation having first and second time differential values of the cam phase as state variables. Furthermore, the switching function in the sliding mode control algorithm is set as a linear function having the deviation between the target cam phase and the cam phase and the time differential value (that is, the changing speed) as a state variable. Then, by calculating the control input so that the deviation and the change speed thereof, which are the state variables of the switching function set as described above, are placed on the switching line, that is, the deviation and the changing speed slide on the switching line, By calculating the control input to converge to the
また、スライディングモード制御アルゴリズムを用いる制御装置として、特許文献2に記載されたものを本出願人はすでに提案している。この制御装置は、内燃機関のスロットル弁駆動装置を制御するものであり、適応スライディングモードコントローラ、オンボード同定器および状態予測器などを備えている。また、スロットル弁駆動装置は、スロットル弁を駆動することで、その開度を変化させるものであり、モータなどを備えている。
Further, the present applicant has already proposed a control device using a sliding mode control algorithm described in
この制御装置では、以下のようにスロットル弁駆動装置を制御するための制御入力が算出される。すなわち、モータへの制御信号のデューティ比を制御入力とし、スロットル弁の開度と目標開度との開度偏差を出力とする系を、制御対象として見なすとともに、その制御対象を、デューティ比、開度偏差および補償値の関係を定義した離散時間系モデルとしてモデル化する。この補償値は、制御対象モデルのモデル化誤差および外乱を補償するためのものである。 In this control device, a control input for controlling the throttle valve driving device is calculated as follows. That is, the duty ratio of the control signal to the motor is set as the control input, and the system that outputs the opening degree deviation between the opening degree of the throttle valve and the target opening degree is regarded as the control target, and the control target is set as the duty ratio, It is modeled as a discrete-time system model that defines the relationship between the opening deviation and the compensation value. This compensation value is for compensating for the modeling error and disturbance of the controlled object model.
そして、オンボード同定器により、制御対象モデルのモデルパラメータおよび補償値が同定演算され、それらの同定値を用いて、適応スライディングモードコントローラにおいて、スライディングモード制御アルゴリズムにより、制御入力が算出される。この制御装置では、以上のように制御入力が算出されるので、制御対象モデルのモデル化誤差および外乱を適切に補償することができ、それにより、高い制御精度が確保される。 Then, the model parameters and the compensation values of the controlled object model are identified and calculated by the on-board identifier, and the control input is calculated by the sliding mode control algorithm in the adaptive sliding mode controller using these identified values. In this control apparatus, since the control input is calculated as described above, the modeling error and disturbance of the controlled object model can be appropriately compensated, thereby ensuring high control accuracy.
上記特許文献1の制御装置では、(f1)制御対象に加えられる外乱の影響を考慮していないので、可変カム位相機構のような定常的な外乱を受けやすい制御対象の場合、定常的な外乱により制御の安定性および制御精度が低下してしまう。(f2)また、可変カム位相機構は、吸気カムのクランクシャフトに対するカム位相を自在に変化させるものであるため、吸気カムが吸気弁を開閉駆動する際、吸気弁のバルブスプリングの付勢力および反力に起因して、振幅が周期的に変化する周期的外乱を受けてしまう(後述する図12参照)。このような周期的外乱を受けると、その影響により、吸気弁の開弁時間が全体的に短くなり(後述する図14,15参照)、開弁時の吸入空気量が減少することで、内燃機関の発生トルクの低下を招くとともに燃焼状態が不安定になってしまう。
In the control device of
(f3)また、制御対象モデルとして連続時間系モデルを用いているので、制御対象モデルのモデルパラメータを制御対象の実験データから直接同定することは困難である。そのため、具体的には、連続時間系モデルを離散時間系モデルに近似変換し、それに基づいてモデルパラメータを同定しなければならないので、このような近似変換の使用により、モデルパラメータの同定精度が低下してしまう。さらに、離散時間系モデルを連続時間系モデルに再度、近似変換しなければならないので、このような2回の近似変換の使用により、制御対象モデルのモデル化誤差も増大してしまう。その結果、制御の安定余裕を確保するために、コントローラゲインを低く抑える必要が生じ、制御性がさらに低下してしまう。すなわち、特許文献1の制御装置では、スライディングモード制御特有のロバスト性および応答指定特性を確保できなくなる。
(F3) Since a continuous-time system model is used as the controlled object model, it is difficult to directly identify the model parameters of the controlled object model from the experimental data of the controlled object. Therefore, it is necessary to approximately convert a continuous-time system model to a discrete-time system model and identify model parameters based on the model, and the use of such approximate conversion reduces the accuracy of model parameter identification. Resulting in. Furthermore, since the discrete-time system model must be approximated again to the continuous-time system model, the modeling error of the control target model also increases by using such two approximate transformations. As a result, it is necessary to keep the controller gain low in order to ensure a stable control margin, and the controllability is further reduced. In other words, the control device of
以上のような特許文献1の問題点を解消するために、特許文献1の制御装置に特許文献2の制御手法を適用することが考えられる。このようにした場合、上述した特許文献1の(f1)および(f3)の問題は解決できるものの、特許文献2の制御手法では、補償値をオンボード同定器で演算しているため、その演算回数が所定値に達するまでの間、上記(f2)の問題を解消することができない。すなわち、周期的外乱の影響を補償し、抑制するのに時間が若干かかり、その間、制御の安定性および制御精度が低下してしまう可能性がある。
In order to solve the problems of
本発明は、上記課題を解決するためになされたもので、周期的外乱が可動部駆動機構に及ぼす影響をより迅速に補償し、抑制することができ、それにより制御の安定性および制御精度を向上させることができる可動部駆動機構の制御装置を提供することを目的とする。 The present invention has been made to solve the above problems, and can more quickly compensate for and suppress the influence of periodic disturbances on the movable part drive mechanism, thereby improving the stability and accuracy of control. It is an object of the present invention to provide a control device for a movable part drive mechanism that can be improved.
上記目的を達成するために、請求項1に係る発明は、内燃機関3の可動部(吸気弁4、吸気カムシャフト5、ピストン3b)の動作タイミング(カム位相Cain)および動作量(バルブリフトLiftin、ピストン3bのストローク)の少なくとも一方を変更するとともに、内燃機関3のクランクシャフト3dの回転に伴って周期的に変化する振幅を有する周期的外乱が加えられる可動部駆動機構(可変バルブリフト機構50、可変カム位相機構70、可変圧縮比機構80)の制御装置1,1A,1Bであって、周期的外乱を補償するための、クランクシャフト3dの回転に伴う周期的外乱の振幅変化の予測結果に応じて予め設定された複数の外乱補償値(カム位相制御用の外乱補償値のマップ値Rcyc_bs_cin、バルブリフト制御用の外乱補償値のマップ値Rcyc_bs_lin、圧縮比制御用の外乱補償値のマップ値Rcyc_bs_cr)を記憶する外乱補償値記憶手段(ECU2、ROM2c、補償要素102,112,122,202,212,222,302,312,322)と、内燃機関3のクランクシャフト3dが所定角度、回転するごとに、それに対応する選択タイミング(CRK信号の発生タイミング)で、記憶されている複数の外乱補償値の中から選択タイミングに応じた外乱補償値を選択する外乱補償値選択手段(ECU2、補償要素102,112,122,202,212,222,302,312,322、ステップ6,9,12)と、可動部駆動機構を制御するための制御入力(カム位相制御用のSLD制御入力Rsld、カム位相制御用の参照入力Rsld_f、バルブリフト制御用のSLD制御入力Rsld’、バルブリフト制御用の参照入力Rsld_f’、圧縮比制御用のSLD制御入力Rsld''、圧縮比制御用の参照入力Rsld_f'')を、選択された外乱補償値に応じて算出する制御入力算出手段(ECU2、2自由度スライディングモードコントローラ103,113,123,203,213,223,303,313,323、加算要素104,114,124、ステップ25〜28)と、を備えることを特徴とする。
In order to achieve the above object, the invention according to
この可動部駆動機構の制御装置によれば、周期的外乱を補償するための複数の外乱補償値が、周期的外乱の振幅変化の予測結果に応じて予め設定されており、外乱補償値記憶手段に記憶されており、これらの複数の外乱補償値の中から、内燃機関のクランクシャフトが所定角度、回転するごとに、それに対応する選択タイミングで、選択タイミングに応じた外乱補償値が選択されるので、この所定角度を適切に設定することにより、外乱補償値を、周期的外乱を適切かつ迅速に補償できる値として選択することができる。また、外乱補償値を選択するだけでよいとともに、そのように選択した外乱補償値に応じて、可動部駆動機構を制御するための制御入力が算出されるので、そのように算出された制御入力を用いて可動部駆動機構を制御することにより、周期的外乱が可動部の動作タイミングおよび動作量の少なくとも一方に及ぼす影響を従来よりも迅速に補償し、抑制することができる。これにより、可動部駆動機構の制御の安定性および制御精度を向上させることができる(なお、本明細書における「外乱補償値の記憶」は、外乱補償値をメモリーなどに記憶することに限らず、外乱補償値を装置内に保持することも含む。また、「制御入力の算出」および「外乱推定値の算出」などの「算出」は、プログラムにより演算することに限らず、電気回路によりそれらを表す電気信号を生成することを含む)。 According to the control device for the movable part drive mechanism, a plurality of disturbance compensation values for compensating for the periodic disturbance are set in advance according to the prediction result of the amplitude change of the periodic disturbance. Each time the crankshaft of the internal combustion engine rotates by a predetermined angle, a disturbance compensation value corresponding to the selection timing is selected from the plurality of disturbance compensation values. Therefore, by appropriately setting the predetermined angle, the disturbance compensation value can be selected as a value that can compensate for the periodic disturbance appropriately and quickly. Further, the need only to select the disturbance compensation value, according to the disturbance compensation value selected so, since the control input for controlling the movable section driving mechanism is issued calculated, so calculated control input By controlling the movable part drive mechanism using the above, the influence of the periodic disturbance on at least one of the operation timing and the operation amount of the movable part can be compensated and suppressed more quickly than in the past. As a result, the stability and control accuracy of the control of the movable part drive mechanism can be improved (Note that “disturbance compensation value storage” in this specification is not limited to storing the disturbance compensation value in a memory or the like. In addition, the disturbance compensation value is stored in the apparatus, and “calculation” such as “calculation of control input” and “calculation of disturbance estimated value” is not limited to calculation by a program, Generating an electrical signal representative of
請求項2に係る発明は、請求項1に記載の可動部駆動機構の制御装置1,1A,1Bにおいて、可動部駆動機構は、内燃機関3の吸気カムシャフト5および排気カムシャフト8の少なくとも一方のクランクシャフト3dに対する位相であるカム位相Cainを、可動部の動作タイミングとして変更する可変カム位相機構70を含むことを特徴とする。
According to a second aspect of the present invention, in the
この可動部駆動機構の制御装置によれば、可動部駆動機構が可動部の動作タイミングとしてカム位相を変更する可変カム位相機構を含んでいるので、外乱補償値に応じて算出された制御入力により、可変カム位相機構を制御することによって、周期的外乱が可変カム位相機構に及ぼす影響を従来よりも迅速に補償し、抑制することができ、可変カム位相機構の制御における安定性および制御精度を向上させることができる。これにより、可変カム位相機構を吸気カムシャフト側のカム位相を変更するものに適用した場合、従来と異なり、周期的外乱の影響によって吸気弁の開弁時間が全体的に短くなるを回避でき、開弁時の吸入空気量が減少するのを回避できる。その結果、内燃機関の発生トルクを適切に確保できるとともに、安定した燃焼状態を確保できる。また、可変カム位相機構を排気カムシャフト側のカム位相を変更するものに適用した場合、周期的外乱の影響によって排気の開弁時間が全体的に短くなり、内部EGR量が減少するのを回避できる。その結果、安定した燃焼状態を確保できる。 According to the control device for the movable part drive mechanism, the movable part drive mechanism includes the variable cam phase mechanism that changes the cam phase as the operation timing of the movable part, so that the control input calculated according to the disturbance compensation value is used. By controlling the variable cam phase mechanism, the effect of periodic disturbance on the variable cam phase mechanism can be compensated and suppressed more quickly than before, and the stability and control accuracy in the control of the variable cam phase mechanism can be improved. Can be improved. Thereby, when the variable cam phase mechanism is applied to the one that changes the cam phase on the intake camshaft side, unlike the conventional case, it is possible to avoid that the opening time of the intake valve is shortened as a whole due to the influence of periodic disturbance, It is possible to avoid a reduction in the intake air amount when the valve is opened. As a result, the generated torque of the internal combustion engine can be appropriately secured and a stable combustion state can be secured. In addition, when the variable cam phase mechanism is applied to one that changes the cam phase on the exhaust camshaft side, the exhaust valve opening time is shortened as a whole due to the influence of periodic disturbance, and the internal EGR amount is prevented from decreasing. it can. As a result, a stable combustion state can be secured.
請求項3に係る発明は、請求項2に記載の可動部駆動機構の制御装置1,1A,1Bにおいて、外乱補償値選択手段は、カム位相を表すカム位相パラメータ(目標カム位相Cain_cmd)にさらに応じて外乱補償値(カム位相制御用の外乱補償値のマップ値Rcyc_bs_cin)を選択することを特徴とする(ステップ6)。
According to a third aspect of the present invention, in the
一般に、可変カム位相機構が内燃機関に設けられている場合、可変カム位相機構によりカム位相が変更されると、それに伴って、可変カム位相機構に加えられる周期的外乱の位相も変化する。これに対して、この制御装置によれば、外乱補償値は、カム位相を表すカム位相パラメータにさらに応じて選択されるので、外乱補償値を、カム位相の変更に伴う周期的外乱の位相変化を適切に補償できるような値として選択することができる。それにより、可変カム位相機構の制御における安定性および制御精度をさらに向上させることができる。 In general, when the variable cam phase mechanism is provided in the internal combustion engine, when the cam phase is changed by the variable cam phase mechanism, the phase of the periodic disturbance applied to the variable cam phase mechanism changes accordingly. On the other hand, according to this control device, the disturbance compensation value is further selected in accordance with the cam phase parameter representing the cam phase, so that the disturbance compensation value is changed to the phase change of the periodic disturbance accompanying the change of the cam phase. Can be selected as a value that can be appropriately compensated. Thereby, the stability and control accuracy in the control of the variable cam phase mechanism can be further improved.
請求項4に係る発明は、請求項2または3に記載の可動部駆動機構の制御装置1,1A,1Bにおいて、内燃機関3は、内燃機関3の吸気弁4および排気弁7の少なくとも一方のリフトであるバルブリフトLiftinを変更する可変バルブリフト機構50を備え、複数の外乱補償値は、可変バルブリフト機構50によるバルブリフトLiftinの変更に伴う周期的外乱の振幅変化および挙動変化の少なくとも一方の予測結果にさらに応じて設定されており、外乱補償値選択手段は、バルブリフトを表すバルブリフトパラメータ(バルブリフトLiftin)にさらに応じて外乱補償値(カム位相制御用の外乱補償値のマップ値Rcyc_bs_cin)を選択することを特徴とする(ステップ6)。
According to a fourth aspect of the present invention, in the
一般に、可変バルブリフト機構が内燃機関に設けられている場合、可変バルブリフト機構によりバルブリフトが変更されると、それに伴って、可変カム位相機構に加えられる周期的外乱の振幅および挙動の少なくとも一方も変化する。これに対して、この制御装置によれば、複数の外乱補償値が、可変バルブリフト機構によるバルブリフトの変更に伴う周期的外乱の振幅変化および挙動変化の少なくとも一方の予測結果にさらに応じて設定されているとともに、外乱補償値は、バルブリフトを表すバルブリフトパラメータにさらに応じて選択されるので、外乱補償値を、バルブリフトの変更に伴う周期的外乱の振幅変化および挙動変化の少なくとも一方を適切に補償できるような値として選択することができる。それにより、可変カム位相機構の制御における安定性および制御精度をより一層、向上させることができる。 In general, when a variable valve lift mechanism is provided in an internal combustion engine, when the valve lift is changed by the variable valve lift mechanism, at least one of the amplitude and behavior of a periodic disturbance applied to the variable cam phase mechanism is accordingly accompanied. Also changes. On the other hand, according to this control device, a plurality of disturbance compensation values are further set according to the prediction result of at least one of the amplitude change and behavior change of the periodic disturbance accompanying the change of the valve lift by the variable valve lift mechanism. Since the disturbance compensation value is further selected in accordance with the valve lift parameter representing the valve lift, the disturbance compensation value is determined based on at least one of the amplitude change and the behavior change of the periodic disturbance accompanying the change of the valve lift. It can be selected as a value that can be compensated appropriately. Thereby, stability and control accuracy in the control of the variable cam phase mechanism can be further improved.
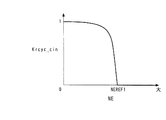
請求項5に係る発明は、請求項2ないし4のいずれかに記載の可動部駆動機構の制御装置1,1A,1Bにおいて、制御入力算出手段は、外乱補償値(カム位相制御用の外乱補償値のマップ値Rcyc_bs_cin)を内燃機関3の回転数NEに応じて補正する(ステップ7,8)とともに、補正した外乱補償値(カム位相制御用の外乱補償値Rcyc_cin)に応じて、制御入力(カム位相制御用のSLD制御入力Rsld、カム位相制御用の参照入力Rsld_f)を算出することを特徴とする。
According to a fifth aspect of the present invention, in the
一般に、内燃機関の回転数が変化すると、それに伴って、可変カム位相機構に加えられる周期的外乱の周波数も変化する。これに対して、この制御装置によれば、外乱補償値が内燃機関の回転数に応じて補正されるので、補正した外乱補償値に、内燃機関の回転数変化に伴う周期的外乱の周波数変化を反映させることができる。さらに、そのように補正した外乱補償値に応じて、制御入力が算出されるので、内燃機関の回転数変化に伴う周期的外乱の周波数変化を適切に補償しながら、可変カム位相機構を制御することができる。 Generally, when the rotational speed of the internal combustion engine changes, the frequency of the periodic disturbance applied to the variable cam phase mechanism also changes accordingly. On the other hand, according to this control device, the disturbance compensation value is corrected in accordance with the rotational speed of the internal combustion engine, so that the frequency change of the periodic disturbance accompanying the rotational speed change of the internal combustion engine is added to the corrected disturbance compensation value. Can be reflected. Further, since the control input is calculated according to the disturbance compensation value corrected as described above, the variable cam phase mechanism is controlled while appropriately compensating for the frequency change of the periodic disturbance accompanying the rotational speed change of the internal combustion engine. be able to.
請求項6に係る発明は、請求項2ないし5のいずれかに記載の可動部駆動機構の制御装置1,1A,1Bにおいて、制御入力算出手段は、内燃機関3の回転数NEが所定回転数NEREF1以上のときには、制御入力を、外乱補償値とは無関係に算出する(Rcyc_cin=0)ことを特徴とする。
According to a sixth aspect of the present invention, in the
請求項2の制御装置では、外乱補償値が、内燃機関のクランクシャフトが所定角度、回転するごとに、それに対応する選択タイミングで選択されるので、内燃機関の回転数が高回転になると、外乱補償値の選択タイミングの間隔すなわち選択周期が極めて短くなり、そのような短い選択周期で選択された外乱補償値を用いて制御入力を算出した場合、可変カム位相機構の応答性の低さに起因して、外乱補償を適切に行うことができなくなり、制御性が低下する可能性がある。これに対して、この請求項6に係る制御装置では、制御入力が、内燃機関の回転数が所定回転数以上のときには、外乱補償値とは無関係に算出されるので、所定回転数を適切な値に設定することにより、高回転域での制御性の低下を回避しながら、可変カム位相機構を制御することができる。 In the control device according to the second aspect, the disturbance compensation value is selected at a selection timing corresponding to the rotation of the crankshaft of the internal combustion engine every predetermined angle. Therefore, when the rotational speed of the internal combustion engine becomes high, the disturbance compensation value is selected. Compensation value selection timing interval, that is, the selection cycle becomes extremely short, and when the control input is calculated using the disturbance compensation value selected in such a short selection cycle, the variable cam phase mechanism has low responsiveness. Thus, disturbance compensation cannot be performed properly, and controllability may be reduced. On the other hand, in the control device according to the sixth aspect, the control input is calculated regardless of the disturbance compensation value when the rotational speed of the internal combustion engine is equal to or higher than the predetermined rotational speed. By setting the value, the variable cam phase mechanism can be controlled while avoiding a decrease in controllability in the high rotation range.
請求項7に係る発明は、請求項2ないし6のいずれかに記載の可動部駆動機構の制御装置1,1A,1Bにおいて、カム位相の目標となる目標カム位相Cain_cmdを設定する目標カム位相設定手段(ECU2、目標カム位相算出部101,201,301)をさらに備え、制御入力算出手段は、カム位相Cainが目標カム位相Cain_cmdに収束するように、所定の応答指定型制御アルゴリズムを用いて、制御入力を算出することを特徴とする。
The invention according to
この可動部駆動機構の制御装置によれば、カム位相が目標カム位相に収束するように、所定の応答指定型制御アルゴリズムを用いて、制御入力が算出されるので、カム位相と目標カム位相との間に大きな偏差が生じた場合でも、そのような偏差に起因するオーバーシュートの発生を回避しながら、カム位相を目標カム位相に迅速に精度よく収束させることができる。その結果、制御の安定性および制御精度を格段に向上させることができる。 According to this control device for the movable part drive mechanism , the control input is calculated using a predetermined response designating control algorithm so that the cam phase converges to the target cam phase. Even if a large deviation occurs during the period, the cam phase can be quickly and accurately converged to the target cam phase while avoiding the occurrence of overshoot due to such deviation. As a result, control stability and control accuracy can be significantly improved.
請求項8に係る発明は、請求項2ないし6のいずれかに記載の可動部駆動機構の制御装置1Aにおいて、可変カム位相機構70における外乱およびモデル化誤差を補償するための外乱推定値(カム位相制御用の外乱推定値c1)を、外乱推定値と制御入力(カム位相制御用のSLD制御入力Rsld)とカム位相Cainとの関係を定義したモデル[式(20)]に基づく所定の推定アルゴリズムにより算出する外乱推定値算出手段(ECU2、適応外乱オブザーバ206)をさらに備え、制御入力算出手段は、制御入力を、算出された外乱推定値にさらに応じて算出することを特徴とする。
According to an eighth aspect of the present invention, there is provided a disturbance estimation value (cam) for compensating for disturbances and modeling errors in the variable
この可動部駆動機構の制御装置によれば、可変カム位相機構における外乱およびモデル化誤差を補償するための外乱推定値が、外乱推定値と制御入力とカム位相との関係を定義したモデルに基づく所定の推定アルゴリズムにより算出され、制御入力が、算出された外乱推定値にさらに応じて算出されるので、可変カム位相機構に作用する定常的な外乱およびカム位相制御でのモデル化誤差も適切に補償することができ、カム位相を定常偏差が生じないように制御することができる。その結果、制御の安定性および制御精度を格段に向上させることができる。 According to the control device for the movable part drive mechanism, the disturbance estimated value for compensating for disturbance and modeling error in the variable cam phase mechanism is based on a model that defines the relationship between the disturbance estimated value, the control input, and the cam phase. Calculated by a predetermined estimation algorithm, and the control input is further calculated according to the calculated disturbance estimated value. Therefore, the steady disturbance acting on the variable cam phase mechanism and the modeling error in the cam phase control are also appropriately set. It is possible to compensate, and the cam phase can be controlled so that no steady deviation occurs. As a result, control stability and control accuracy can be significantly improved.
請求項9に係る発明は、請求項2ないし6のいずれかに記載の可動部駆動機構の制御装置1Bにおいて、外乱補償値Rcyc_cinと制御入力(カム位相制御用のSLD制御入力Rsld)とカム位相Cainとの関係を定義したモデル[式(40)]のモデルパラメータb1,b2を、オンボード同定するモデルパラメータ同定手段(ECU2、部分パラメータ同定器307)をさらに備え、制御入力算出手段は、制御入力を、同定されたモデルパラメータにさらに応じて算出することを特徴とする。
According to a ninth aspect of the present invention, in the
この可動部駆動機構の制御装置によれば、外乱補償値と制御入力とカム位相との関係を定義したモデルのモデルパラメータが、オンボード同定されるとともに、制御入力が、同定されたモデルパラメータにさらに応じて算出されるので、可変カム位相機構の動特性が変化した場合でも、そのような変化の影響を迅速に吸収しながら、可変カム位相機構を制御することができる。その結果、制御の安定性および制御精度を格段に向上させることができる。 According to the control device for the movable part drive mechanism, the model parameter of the model that defines the relationship between the disturbance compensation value, the control input, and the cam phase is identified on-board , and the control input is converted to the identified model parameter . Since the calculation is further performed, even when the dynamic characteristic of the variable cam phase mechanism changes, the variable cam phase mechanism can be controlled while quickly absorbing the influence of such change. As a result, control stability and control accuracy can be significantly improved.
請求項10に係る発明は、請求項1に記載の可動部駆動機構の制御装置1,1A,1Bにおいて、可動部駆動機構は、内燃機関3の吸気弁4および排気弁7の少なくとも一方のリフトであるバルブリフトLiftinを、可動部の動作量として変更する可変バルブリフト機構50を含むことを特徴とする。
According to a tenth aspect of the present invention, in the
この可動部駆動機構の制御装置によれば、可動部駆動機構が可動部の動作量としてバルブリフトを変更する可変バルブリフト機構を含んでいるので、外乱補償値に応じて算出された制御入力により、可変バルブリフト機構を制御することによって、周期的外乱が可変バルブリフト機構に及ぼす影響を従来よりも迅速に補償し、抑制することができ、可変バルブリフト機構の制御における安定性および制御精度を向上させることができる。これにより、周期的外乱の影響によって吸気弁および/または排気弁のリフトが変動するのを回避でき、開弁時の吸入空気量および/または内部EGR量が変動するのを回避できる。その結果、内燃機関の発生トルクを適切に確保できるとともに、安定した燃焼状態を確保できる。 According to the control device for the movable part drive mechanism, since the movable part drive mechanism includes the variable valve lift mechanism that changes the valve lift as the operation amount of the movable part, the control input calculated according to the disturbance compensation value is used. By controlling the variable valve lift mechanism, the effect of periodic disturbance on the variable valve lift mechanism can be compensated and suppressed more quickly than before, and the stability and control accuracy in the control of the variable valve lift mechanism can be reduced. Can be improved. Thereby, it is possible to avoid fluctuations in the lift of the intake valve and / or the exhaust valve due to the influence of the periodic disturbance, and it is possible to avoid fluctuations in the intake air amount and / or the internal EGR amount when the valve is opened. As a result, the generated torque of the internal combustion engine can be appropriately secured and a stable combustion state can be secured.
請求項11に係る発明は、請求項10に記載の可動部駆動機構の制御装置1,1A,1Bにおいて、外乱補償値選択手段は、バルブリフトを表すバルブリフトパラメータ(目標バルブリフトLiftin_cmd)にさらに応じて外乱補償値(バルブリフト制御用の外乱補償値のマップ値Rcyc_bs_lin)を選択することを特徴とする(ステップ9)。
According to an eleventh aspect of the present invention, in the
一般に、可変バルブリフト機構が内燃機関に設けられている場合、可変バルブリフト機構によりバルブリフトが変更されると、それに伴って、可変バルブリフト機構に加えられる周期的外乱の振幅も変化する。これに対して、この制御装置によれば、外乱補償値は、バルブリフトを表すバルブリフトパラメータにさらに応じて選択されるので、外乱補償値を、バルブリフトの変更に伴う周期的外乱の振幅変化を適切に補償できるような値として選択することができる。それにより、可変バルブリフト機構の制御における安定性および制御精度をさらに向上させることができる。 In general, when the variable valve lift mechanism is provided in the internal combustion engine, when the valve lift is changed by the variable valve lift mechanism, the amplitude of the periodic disturbance applied to the variable valve lift mechanism also changes accordingly. On the other hand, according to this control device, the disturbance compensation value is further selected according to the valve lift parameter indicating the valve lift, and therefore the disturbance compensation value is used as the amplitude change of the periodic disturbance accompanying the change of the valve lift. Can be selected as a value that can be appropriately compensated. Thereby, the stability and control accuracy in the control of the variable valve lift mechanism can be further improved.
請求項12に係る発明は、請求項10または11に記載の可動部駆動機構の制御装置1,1A,1Bにおいて、内燃機関3は、内燃機関3の吸気カムシャフト5および排気カムシャフト8の少なくとも一方のクランクシャフト3dに対する位相であるカム位相Cainを変更する可変カム位相機構70を備え、外乱補償値選択手段は、カム位相を表すカム位相パラメータ(カム位相Cain)にさらに応じて外乱補償値(バルブリフト制御用の外乱補償値のマップ値Rcyc_bs_lin)を選択することを特徴とする(ステップ9)。
According to a twelfth aspect of the present invention, in the
一般に、可変カム位相機構が内燃機関に設けられている場合、可変カム位相機構によりカム位相が変更されると、それに伴って、可変バルブリフト機構に加えられる周期的外乱の位相も変化する。これに対して、この制御装置によれば、外乱補償値は、カム位相を表すカム位相パラメータにさらに応じて選択されるので、外乱補償値を、カム位相の変更に伴う周期的外乱の位相変化を適切に補償できるような値として選択することができる。それにより、可変バルブリフト機構の制御における安定性および制御精度をより一層、向上させることができる。 In general, when the variable cam phase mechanism is provided in the internal combustion engine, when the cam phase is changed by the variable cam phase mechanism, the phase of the periodic disturbance applied to the variable valve lift mechanism changes accordingly. On the other hand, according to this control device, the disturbance compensation value is further selected in accordance with the cam phase parameter representing the cam phase, so that the disturbance compensation value is changed to the phase change of the periodic disturbance accompanying the change of the cam phase. Can be selected as a value that can be appropriately compensated. Thereby, the stability and control accuracy in the control of the variable valve lift mechanism can be further improved.
請求項13に係る発明は、請求項10ないし12のいずれかに記載の可動部駆動機構の制御装置1,1A,1Bにおいて、制御入力算出手段は、外乱補償値(バルブリフト制御用の外乱補償値のマップ値Rcyc_bs_lin)を内燃機関3の回転数NEに応じて補正する(ステップ10,11)とともに、補正した外乱補償値(バルブリフト制御用の外乱補償値Rcyc_lin)に応じて、制御入力(バルブリフト制御用のSLD入力Rsld’、バルブリフト制御用の参照入力Rsld_f’)を算出することを特徴とする。
According to a thirteenth aspect of the present invention, in the
一般に、内燃機関の回転数が変化すると、それに伴って、可変バルブリフト機構に加えられる周期的外乱の周波数も変化する。これに対して、この制御装置によれば、外乱補償値が内燃機関の回転数に応じて補正されるので、補正した外乱補償値に、内燃機関の回転数変化に伴う周期的外乱の周波数変化を反映させることができる。さらに、そのように補正した外乱補償値に応じて、制御入力が算出されるので、内燃機関の回転数変化に伴う周期的外乱の周波数変化を適切に補償しながら、可変バルブリフト機構を制御することができる。 Generally, when the rotational speed of the internal combustion engine changes, the frequency of the periodic disturbance applied to the variable valve lift mechanism also changes accordingly. On the other hand, according to this control device, the disturbance compensation value is corrected in accordance with the rotational speed of the internal combustion engine, so that the frequency change of the periodic disturbance accompanying the rotational speed change of the internal combustion engine is added to the corrected disturbance compensation value. Can be reflected. Further, since the control input is calculated according to the disturbance compensation value corrected as described above, the variable valve lift mechanism is controlled while appropriately compensating for the frequency change of the periodic disturbance accompanying the change in the rotational speed of the internal combustion engine. be able to.
請求項14に係る発明は、請求項10ないし13のいずれかに記載の可動部駆動機構の制御装置1,1A,1Bにおいて、制御入力算出手段は、内燃機関の回転数NEが所定回転数NEREF2以上のときには、制御入力を、外乱補償値とは無関係に算出する(Rcyc_lin=0)ことを特徴とする。
According to a fourteenth aspect of the present invention, in the
請求項10の制御装置では、外乱補償値が、内燃機関のクランクシャフトが所定角度、回転するごとに、それに対応する選択タイミングで選択されるので、内燃機関の回転数が高回転になると、外乱補償値の選択タイミングの間隔すなわち選択周期が極めて短くなり、そのような短い選択周期で選択された外乱補償値を用いて制御入力を算出した場合、可変バルブリフト機構の応答性の低さに起因して、外乱補償を適切に行うことができなくなり、制御性が低下する可能性がある。これに対して、この請求項14に係る制御装置では、制御入力が、内燃機関の回転数が所定回転数以上のときには、外乱補償値とは無関係に算出されるので、所定回転数を適切な値に設定することにより、高回転域での制御性の低下を回避しながら、可変バルブリフト機構を制御することができる。
In the control device according to
請求項15に係る発明は、請求項10ないし14のいずれかに記載の可動部駆動機構の制御装置1,1A,1Bにおいて、バルブリフトの目標となる目標バルブリフトLiftin_cmdを設定する目標バルブリフト設定手段(ECU2、目標バルブリフト算出部111,211,311)をさらに備え、制御入力算出手段は、バルブリフトLiftinが目標バルブリフトLiftin_cmdに収束するように、所定の応答指定型制御アルゴリズムを用いて、制御入力を算出することを特徴とする。
The invention according to
この可動部駆動機構の制御装置によれば、バルブリフトが目標バルブリフトに収束するように、所定の応答指定型制御アルゴリズムを用いて、制御入力が算出されるので、バルブリフトと目標バルブリフトとの間に大きな偏差が生じた場合でも、そのような偏差に起因するオーバーシュートの発生を回避しながら、バルブリフトを目標バルブリフトに迅速に精度よく収束させることができる。その結果、制御の安定性および制御精度を格段に向上させることができる。 According to this control device for the movable part drive mechanism , the control input is calculated using a predetermined response designating control algorithm so that the valve lift converges to the target valve lift. Even when a large deviation occurs between the valve lifts, the valve lift can be quickly and accurately converged to the target valve lift while avoiding the occurrence of overshoot due to such deviations. As a result, control stability and control accuracy can be significantly improved.
請求項16に係る発明は、請求項10ないし14のいずれかに記載の可動部駆動機構の制御装置1Aにおいて、可変バルブリフト機構50における外乱およびモデル化誤差を補償するための外乱推定値(バルブリフト制御用の外乱推定値c1’)を、外乱推定値と制御入力(バルブリフト制御用のSLD制御入力Rsld’)とバルブリフトLiftinとの関係を定義したモデルに基づく所定の推定アルゴリズムにより算出する外乱推定値算出手段(ECU2、適応外乱オブザーバ216)をさらに備え、制御入力算出手段は、制御入力を、算出された外乱推定値にさらに応じて算出することを特徴とする。
According to a sixteenth aspect of the present invention, there is provided a disturbance estimation value (valve for compensating for disturbance and modeling error in the variable
この可動部駆動機構の制御装置によれば、可変バルブリフト機構における外乱およびモデル化誤差を補償するための外乱推定値が、外乱推定値と制御入力とバルブリフトとの関係を定義したモデルに基づく所定の推定アルゴリズムにより算出され、制御入力が、算出された外乱推定値にさらに応じて算出されるので、可変バルブリフト機構に作用する定常的な外乱およびバルブリフト制御でのモデル化誤差も適切に補償することができ、バルブリフトを定常偏差が生じないように制御することができる。その結果、制御の安定性および制御精度を格段に向上させることができる。 According to the control device for the movable part drive mechanism, the disturbance estimated value for compensating for disturbance and modeling error in the variable valve lift mechanism is based on a model that defines the relationship between the disturbance estimated value, the control input, and the valve lift. Calculated by a predetermined estimation algorithm, and the control input is further calculated according to the calculated disturbance estimated value. Therefore, the steady disturbance acting on the variable valve lift mechanism and the modeling error in the valve lift control are also appropriately It is possible to compensate, and it is possible to control the valve lift so that no steady deviation occurs. As a result, control stability and control accuracy can be significantly improved.
請求項17に係る発明は、請求項10ないし14のいずれかに記載の可動部駆動機構の制御装置1Bにおいて、外乱補償値Rcyc_linと制御入力(バルブリフト制御用のSLD制御入力Rsld’)とバルブリフトLiftinとの関係を定義したモデルのモデルパラメータb1’,b2’を、オンボード同定するモデルパラメータ同定手段(ECU2、部分パラメータ同定器317)をさらに備え、制御入力算出手段は、制御入力を、同定されたモデルパラメータb1’,b2’にさらに応じて算出することを特徴とする。
The invention according to
この可動部駆動機構の制御装置によれば、外乱補償値と制御入力とバルブリフトとの関係を定義したモデルのモデルパラメータが、オンボード同定されるとともに、制御入力が、同定されたモデルパラメータにさらに応じて算出されるので、可変バルブリフト機構の動特性が変化した場合でも、そのような変化の影響を迅速に吸収しながら、可変バルブリフト機構を制御することができる。その結果、制御の安定性および制御精度を格段に向上させることができる。 According to the control device for the movable part drive mechanism, the model parameter of the model that defines the relationship between the disturbance compensation value, the control input, and the valve lift is identified on-board , and the control input is converted to the identified model parameter. Further, since the calculation is performed accordingly, even when the dynamic characteristic of the variable valve lift mechanism changes, the variable valve lift mechanism can be controlled while quickly absorbing the influence of such change. As a result, control stability and control accuracy can be significantly improved.
請求項18に係る発明は、請求項1に記載の可動部駆動機構の制御装置1,1A,1Bにおいて、可動部駆動機構は、内燃機関3のピストン3bのストロークを、可動部の動作量として変更することにより、内燃機関3の圧縮比Crを変更する可変圧縮比機構80を含むことを特徴とする。
According to an eighteenth aspect of the present invention, in the
一般に、可変圧縮比機構の場合、周期的外乱を受けると、その影響により圧縮比が変化することで、圧縮比と点火時期の間の適合性が低下してしまい、その結果、ノッキングが発生したり、燃焼効率が低下したりするおそれがある。これに対して、この制御装置によれば、外乱補償値に応じて算出された制御入力により、可変圧縮比機構を制御することによって、周期的外乱が可変圧縮比機構に及ぼす影響を従来よりも迅速に補償し、抑制することができるので、周期的外乱の影響による圧縮比の変化を回避でき、圧縮比と点火時期との間の適合性を良好な状態に維持できる。その結果、ノッキングの発生および燃焼効率の低下を回避することができ、安定した燃焼状態を確保できる。 In general, in the case of a variable compression ratio mechanism, if a periodic disturbance is applied, the compression ratio changes due to the influence of the change, and the compatibility between the compression ratio and the ignition timing is lowered, resulting in knocking. Or the combustion efficiency may be reduced. In contrast, according to this control apparatus, the influence of the periodic disturbance on the variable compression ratio mechanism is controlled by controlling the variable compression ratio mechanism with the control input calculated according to the disturbance compensation value. Since compensation and suppression can be performed quickly, changes in the compression ratio due to the influence of periodic disturbance can be avoided, and compatibility between the compression ratio and the ignition timing can be maintained in a good state. As a result, the occurrence of knocking and a decrease in combustion efficiency can be avoided, and a stable combustion state can be ensured.
請求項19に係る発明は、請求項18に記載の可動部駆動機構の制御装置1,1A,1Bにおいて、外乱補償値選択手段は、圧縮比を表す圧縮比パラメータ(目標圧縮比Cr_cmd)にさらに応じて外乱補償値(圧縮比制御用の外乱補償値のマップ値Rcyc_bs_cr)を選択することを特徴とする(ステップ12)。
According to a nineteenth aspect of the present invention, in the
一般に、可変圧縮比機構が内燃機関に設けられている場合、可変圧縮比機構により圧縮比が変更されると、それに伴って、可変圧縮比機構に加えられる周期的外乱の振幅も変化する。これに対して、この制御装置によれば、外乱補償値は、圧縮比を表す圧縮比パラメータにさらに応じて選択されるので、外乱補償値を、圧縮比の変更に伴う周期的外乱の振幅変化を適切に補償できるような値として選択することができる。それにより、可変圧縮比機構の制御における安定性および制御精度をさらに向上させることができる。 In general, when the variable compression ratio mechanism is provided in the internal combustion engine, when the compression ratio is changed by the variable compression ratio mechanism, the amplitude of the periodic disturbance applied to the variable compression ratio mechanism also changes accordingly. On the other hand, according to this control device, the disturbance compensation value is further selected in accordance with the compression ratio parameter representing the compression ratio. Therefore, the disturbance compensation value is changed as the amplitude change of the periodic disturbance accompanying the change of the compression ratio. Can be selected as a value that can be appropriately compensated. Thereby, the stability and control accuracy in the control of the variable compression ratio mechanism can be further improved.
請求項20に係る発明は、請求項18または19に記載の可動部駆動機構の制御装置1,1A,1Bにおいて、制御入力算出手段は、外乱補償値(圧縮比制御用の外乱補償値のマップ値Rcyc_bs_cr)を内燃機関3の回転数NEに応じて補正する(ステップ14,15)とともに、補正した外乱補償値(圧縮比制御用の外乱補償値Rcyc_cr)に応じて、制御入力(圧縮比制御用のSLD制御入力Rsld''、圧縮比制御用の参照入力Rsld_f'')を算出することを特徴とする。
According to a twentieth aspect of the present invention, in the
一般に、内燃機関の回転数が変化すると、それに伴って、可変圧縮比機構に加えられる周期的外乱の周波数も変化する。これに対して、この制御装置によれば、外乱補償値が内燃機関の回転数に応じて補正されるので、補正した外乱補償値に、内燃機関の回転数変化に伴う周期的外乱の周波数変化を反映させることができる。さらに、そのように補正した外乱補償値に応じて、制御入力が算出されるので、内燃機関の回転数変化に伴う周期的外乱の周波数変化を適切に補償しながら、可変圧縮比機構を制御することができる。 Generally, when the rotational speed of the internal combustion engine changes, the frequency of the periodic disturbance applied to the variable compression ratio mechanism also changes accordingly. On the other hand, according to this control device, the disturbance compensation value is corrected in accordance with the rotational speed of the internal combustion engine, so that the frequency change of the periodic disturbance accompanying the rotational speed change of the internal combustion engine is added to the corrected disturbance compensation value. Can be reflected. Further, since the control input is calculated according to the disturbance compensation value corrected as described above, the variable compression ratio mechanism is controlled while appropriately compensating for the frequency change of the periodic disturbance accompanying the change in the rotational speed of the internal combustion engine. be able to.
請求項21に係る発明は、請求項18または19に記載の可動部駆動機構の制御装置1,1A,1Bにおいて、制御入力算出手段は、外乱補償値を内燃機関3の負荷を表す負荷パラメータ(カム位相Cain、バルブリフトLiftin)に応じて補正する(ステップ13,15)とともに、補正した外乱補償値(圧縮比制御用の外乱補償値Rcyc_cr)に応じて、制御入力を算出することを特徴とする。
According to a twenty-first aspect of the present invention, in the
一般に、内燃機関の負荷が変化すると、それに伴って、可変圧縮比機構に加えられる周期的外乱の振幅も変化する。これに対して、この制御装置によれば、外乱補償値が内燃機関の負荷を表す負荷パラメータに応じて補正されるので、補正した外乱補償値に、内燃機関の負荷の変動に伴う周期的外乱の振幅の変化を反映させることができる。さらに、そのように補正した外乱補償値に応じて、制御入力が算出されるので、内燃機関の負荷の変化に伴う周期的外乱の振幅の変化を適切に補償しながら、可変圧縮比機構を制御することができる。 Generally, when the load of the internal combustion engine changes, the amplitude of the periodic disturbance applied to the variable compression ratio mechanism also changes accordingly. On the other hand, according to this control device, the disturbance compensation value is corrected according to the load parameter representing the load of the internal combustion engine, so that the periodic disturbance accompanying the fluctuation of the load of the internal combustion engine is added to the corrected disturbance compensation value. It is possible to reflect the change in the amplitude of. Furthermore, since the control input is calculated according to the disturbance compensation value corrected in this way, the variable compression ratio mechanism is controlled while appropriately compensating for the change in the amplitude of the periodic disturbance accompanying the change in the load of the internal combustion engine. can do.
請求項22に係る発明は、請求項21に記載の可動部駆動機構の制御装置1,1A,1Bにおいて、内燃機関3は、内燃機関3の吸気カムシャフト5および排気カムシャフト8の少なくとも一方のクランクシャフト3dに対する位相であるカム位相Cainを変更する可変カム位相機構70を備え、負荷パラメータは、カム位相を表すカム位相パラメータ(カム位相Cain)を含むことを特徴とする。
According to a twenty-second aspect of the present invention, in the
一般に、可変カム位相機構が内燃機関に設けられている場合、可変カム位相機構によりカム位相が変更されると、それに伴って、可変圧縮比機構に加えられる周期的外乱の振幅も変化する。これに対して、この制御装置によれば、負荷パラメータがカム位相を表すカム位相パラメータを含むので、外乱補償値がカム位相パラメータに応じて補正されることで、補正した外乱補償値に、内燃機関のカム位相の変動に伴う周期的外乱の振幅の変化を反映させることができ、その結果、周期的外乱の振幅の変化を適切に補償しながら、可変圧縮比機構を制御することができる。 In general, when the variable cam phase mechanism is provided in the internal combustion engine, when the cam phase is changed by the variable cam phase mechanism, the amplitude of the periodic disturbance applied to the variable compression ratio mechanism also changes accordingly. On the other hand, according to this control device, since the load parameter includes the cam phase parameter representing the cam phase, the disturbance compensation value is corrected according to the cam phase parameter. A change in the amplitude of the periodic disturbance accompanying a change in the cam phase of the engine can be reflected. As a result, the variable compression ratio mechanism can be controlled while appropriately compensating for the change in the amplitude of the periodic disturbance.
請求項23に係る発明は、請求項21または22に記載の可動部駆動機構の制御装置1,1A,1Bにおいて、内燃機関3は、内燃機関3の吸気弁4および排気弁7の少なくとも一方のリフトであるバルブリフトLiftinを変更する可変バルブリフト機構50を備え、負荷パラメータは、バルブリフトを表すバルブリフトパラメータ(バルブリフトLiftin)を含むことを特徴とする。
According to a twenty-third aspect of the present invention, in the
一般に、可変バルブリフト機構が内燃機関に設けられている場合、可変バルブリフト機構によりバルブリフトが変更されると、それに伴って、可変圧縮比機構に加えられる周期的外乱の振幅も変化する。これに対して、この制御装置によれば、負荷パラメータがバルブリフトを表すバルブリフトパラメータを含むので、外乱補償値がバルブリフトパラメータに応じて補正されることで、補正した外乱補償値に、内燃機関のバルブリフトの変動に伴う周期的外乱の振幅の変化を反映させることができ、その結果、周期的外乱の振幅の変化を適切に補償しながら、可変圧縮比機構を制御することができる。 In general, when a variable valve lift mechanism is provided in an internal combustion engine, when the valve lift is changed by the variable valve lift mechanism, the amplitude of a periodic disturbance applied to the variable compression ratio mechanism also changes accordingly. On the other hand, according to this control device, since the load parameter includes the valve lift parameter indicating the valve lift, the disturbance compensation value is corrected according to the valve lift parameter, so that the corrected disturbance compensation value is changed to the internal combustion compensation value. A change in the amplitude of the periodic disturbance accompanying the fluctuation of the valve lift of the engine can be reflected. As a result, the variable compression ratio mechanism can be controlled while appropriately compensating for the change in the amplitude of the periodic disturbance.
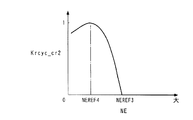
請求項24に係る発明は、請求項20ないし23のいずれかに記載の可動部駆動機構の制御装置1,1A,1Bにおいて、制御入力算出手段は、内燃機関の回転数NEが所定回転数NEREF3以上のときには、制御入力を、外乱補償値とは無関係に算出する(Rcyc_cr=0)ことを特徴とする。
According to a twenty-fourth aspect of the present invention, in the
請求項18の制御装置では、外乱補償値が、内燃機関のクランクシャフトが所定角度、回転するごとに、それに対応する選択タイミングで選択されるので、内燃機関の回転数が高回転になると、外乱補償値の選択タイミングの間隔すなわち選択周期が極めて短くなり、そのような短い選択周期で選択された外乱補償値を用いて制御入力を算出した場合、可変圧縮比機構の応答性の低さに起因して、外乱補償を適切に行うことができなくなり、制御性が低下する可能性がある。これに対して、この請求項24に係る制御装置では、制御入力が、内燃機関の回転数が所定回転数以上のときには、外乱補償値とは無関係に算出されるので、所定回転数を適切な値に設定することにより、高回転域での制御性の低下を回避しながら、可変圧縮比機構を制御することができる。
In the control device according to
請求項25に係る発明は、請求項18ないし24のいずれかに記載の可動部駆動機構の制御装置1,1A,1Bにおいて、圧縮比Crの目標となる目標圧縮比Cr_cmdを設定する目標圧縮比設定手段(ECU2、目標圧縮比算出部121,221,321)をさらに備え、制御入力算出手段は、圧縮比Crを目標圧縮比Cr_cmdに収束させるように、所定の応答指定型制御アルゴリズムを用いて、制御入力を算出することを特徴とする。
The invention according to
この可動部駆動機構の制御装置によれば、圧縮比が目標圧縮比に収束するように、所定の応答指定型制御アルゴリズムを用いて、制御入力が算出されるので、圧縮比と目標圧縮比との間に大きな偏差が生じた場合でも、そのような偏差に起因するオーバーシュートの発生を回避しながら、圧縮比を目標圧縮比に迅速に精度よく収束させることができる。その結果、制御の安定性および制御精度を格段に向上させることができる。 According to this control device for the movable part drive mechanism , the control input is calculated using a predetermined response designating control algorithm so that the compression ratio converges to the target compression ratio. Even if a large deviation occurs between the two, the compression ratio can be quickly and accurately converged to the target compression ratio while avoiding the occurrence of overshoot due to such deviation. As a result, control stability and control accuracy can be significantly improved.
請求項26に係る発明は、請求項18ないし24のいずれかに記載の可動部駆動機構の制御装置1Aにおいて、可変圧縮比機構80における外乱およびモデル化誤差を補償するための外乱推定値(圧縮比制御用の外乱推定値c1'')を、外乱推定値と制御入力(圧縮比制御用のSLD制御入力Rsld'')と圧縮比Crとの関係を定義したモデルに基づく所定の推定アルゴリズムにより算出する外乱推定値算出手段(適応外乱オブザーバ226)をさらに備え、制御入力算出手段は、制御入力を、算出された外乱推定値にさらに応じて算出することを特徴とする。
According to a twenty-sixth aspect of the present invention, in the
この可動部駆動機構の制御装置によれば、可変圧縮比機構における外乱およびモデル化誤差を補償するための外乱推定値が、外乱推定値と制御入力と圧縮比との関係を定義したモデルに基づく所定の推定アルゴリズムにより算出され、制御入力が、算出された外乱推定値にさらに応じて算出されるので、可変圧縮比機構に作用する定常的な外乱および圧縮比制御でのモデル化誤差も適切に補償することができ、圧縮比を定常偏差が生じないように制御することができる。その結果、制御の安定性および制御精度を格段に向上させることができる。 According to the control device for the movable part drive mechanism, the disturbance estimated value for compensating for disturbance and modeling error in the variable compression ratio mechanism is based on a model that defines the relationship between the disturbance estimated value, the control input, and the compression ratio. Calculated by a predetermined estimation algorithm, and the control input is further calculated according to the calculated disturbance estimated value, so that the steady disturbance acting on the variable compression ratio mechanism and the modeling error in the compression ratio control are also appropriately It is possible to compensate, and the compression ratio can be controlled so that no steady-state deviation occurs. As a result, control stability and control accuracy can be significantly improved.
請求項27に係る発明は、請求項18ないし24のいずれかに記載の可動部駆動機構の制御装置1Bにおいて、外乱補償値Rcyc_crと制御入力(圧縮比制御用のSLD制御入力Rsld'')と圧縮比Crとの関係を定義したモデルのモデルパラメータb1'',b2''を、オンボード同定するモデルパラメータ同定手段(部分パラメータ同定器327)をさらに備え、制御入力算出手段は、制御入力を、同定されたモデルパラメータb1'',b2''にさらに応じて算出することを特徴とする。
According to a twenty-seventh aspect of the present invention, in the
この可動部駆動機構の制御装置によれば、外乱補償値と制御入力と圧縮比との関係を定義したモデルのモデルパラメータが、オンボード同定されるとともに、制御入力が、同定されたモデルパラメータにさらに応じて算出されるので、可変圧縮比機構の動特性が変化した場合でも、そのような変化の影響を迅速に吸収しながら、可変圧縮比機構を制御することができる。その結果、制御の安定性および制御精度を格段に向上させることができる。 According to the control device for this movable part drive mechanism, the model parameter of the model that defines the relationship between the disturbance compensation value, the control input, and the compression ratio is identified on-board , and the control input is converted to the identified model parameter. Further, since the calculation is performed accordingly, even when the dynamic characteristics of the variable compression ratio mechanism change, the variable compression ratio mechanism can be controlled while quickly absorbing the influence of such a change. As a result, control stability and control accuracy can be significantly improved.
以下、図面を参照しながら、本発明の第1実施形態に係る制御装置について説明する。この制御装置1は、図2に示すように、ECU2を備えており、このECU2は、後述するように、内燃機関(以下「エンジン」という)3の運転状態に応じて、バルブリフト制御、カム位相制御および圧縮比制御などの制御処理を実行する。
Hereinafter, a control device according to a first embodiment of the present invention will be described with reference to the drawings. As shown in FIG. 2, the
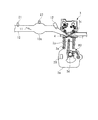
図1および図3に示すように、エンジン3は、4組のシリンダ3aおよびピストン3b(1組のみ図示)を有する直列4気筒ガソリンエンジンであり、図示しない車両に搭載されている。エンジン3は、シリンダ3aごとに設けられ、吸気ポートおよび排気ポートをそれぞれ開閉する吸気弁4および排気弁7と、吸気弁4駆動用の吸気カムシャフト5および吸気カム6と、吸気弁4を開閉駆動する可変式吸気動弁機構40と、排気弁7駆動用の排気カムシャフト8および排気カム9と、排気弁7を開閉駆動する排気動弁機構30と、可変圧縮比機構80などを備えている。
As shown in FIGS. 1 and 3, the
吸気弁4は、そのステム4aがガイド4bに摺動自在に嵌合しており、このガイド4bは、シリンダヘッド3cに固定されている。さらに、吸気弁4は、図4に示すように、上下のスプリングシート4c,4dと、これらの間に設けられたバルブスプリング4eとを備えており、このバルブスプリング4eにより、閉弁方向に付勢されている。
The
また、吸気カムシャフト5および排気カムシャフト8はそれぞれ、図示しないホルダを介して、シリンダヘッド3cに回動自在に取り付けられている。この吸気カムシャフト5の一端部上には、吸気スプロケット(図示せず)が同軸に配置され、回転自在に設けられている。この吸気スプロケットは、図示しないタイミングベルトを介してクランクシャフト3dに連結され、後述する可変カム位相機構70を介して吸気カムシャフト5に連結されている。以上の構成により、吸気カムシャフト5は、クランクシャフト3dが2回転するごとに1回転する。また、吸気カム6は、吸気カムシャフト5上にこれと一体に回転するようにシリンダ3aごとに設けられている。
Further, each of the
さらに、可変式吸気動弁機構40は、吸気カムシャフト5の回転に伴って、各シリンダ3aの吸気弁4を開閉駆動するとともに、吸気弁4のリフトおよびバルブタイミングを無段階に変更するものであり、その詳細については、後述する。なお、本実施形態では、「吸気弁4のリフト(以下「バルブリフト」という)」は、吸気弁4の最大揚程を表すものとする。
Further, the variable
一方、排気弁7は、そのステム7aがガイド7bに摺動自在に嵌合しており、このガイド7bは、シリンダヘッド3cに固定されている。さらに、排気弁7は、上下のスプリングシート7c,7dと、これらの間に設けられたバルブスプリング7eとを備えており、このバルブスプリング7eにより、閉弁方向に付勢されている。
On the other hand, the
また、排気カムシャフト8は、これと一体の排気スプロケット(図示せず)を備え、この排気スプロケットおよび図示しないタイミングベルトを介してクランクシャフト3dに連結されており、それにより、クランクシャフト3dが2回転するごとに1回転する。さらに、排気カム9は、排気カムシャフト8上にこれと一体に回転するようにシリンダ3aごとに設けられている。
The
さらに、排気動弁機構30は、ロッカアーム31を備えており、このロッカアーム31が排気カム9の回転に伴って回動することにより、バルブスプリング7eの付勢力に抗しながら、排気弁7を開閉駆動する。
Further, the
一方、エンジン3には、クランク角センサ20が設けられている。このクランク角センサ20は、マグネットロータおよびMREピックアップで構成されており、クランクシャフト3dの回転に伴い、いずれもパルス信号であるCRK信号およびTDC信号をECU2に出力する。このCRK信号は、クランク角10゜ごとに1パルスが出力され、ECU2は、このCRK信号に基づき、エンジン3の回転数(以下「エンジン回転数」という)NEを算出する。また、TDC信号は、各シリンダ3aのピストン3bが吸気行程のTDC位置よりも若干、手前の所定のクランク角位置にあることを表す信号であり、所定クランク角ごとに1パルスが出力される。
On the other hand, the
また、エンジン3の吸気管10には、上流側から順に、エアフローセンサ21、スロットル弁11、吸気管内絶対圧センサ22および燃料噴射弁12などが設けられている。
The
このエアフローセンサ21は、熱線式エアフローメータで構成されており、スロットル弁11を通過する吸入空気量(以下「TH通過吸入空気量」という)GTHを表す検出信号をECU2に出力する。また、スロットル弁11は、吸気管10の途中に回動自在に設けられており、当該回動に伴う開度の変化によりTH通過吸入空気量GTHを変化させる。さらに、スロットル弁11は、ECU2により、図示しないアクチュエータを介して、通常運転時、全開状態に保持されるとともに、可変式吸気動弁機構40の故障時またはマスタバック(図示せず)への負圧供給時には、開度が制御される。
The
また、吸気管10のスロットル弁11よりも下流側の部分は、サージタンク10aになっており、このサージタンク10aに、吸気管内絶対圧センサ22が設けられている。この吸気管内絶対圧センサ22は、例えば半導体圧力センサなどで構成され、吸気管10内の絶対圧(以下「吸気管内絶対圧」という)PBAを表す検出信号をECU2に出力する。
A portion of the
さらに、燃料噴射弁12は、ECU2からの駆動信号によって駆動され、燃料を吸気管10内に噴射する。また、エンジン3のシリンダヘッド3cには、点火プラグ13(図2参照)が取り付けられている。この点火プラグ13は、点火時期に応じた駆動信号がECU2から加えられることによって放電し、燃焼室内の混合気を燃焼させる。
Further, the
次に、前述した可変式吸気動弁機構40について説明する。この可変式吸気動弁機構40は、図4に示すように、吸気カムシャフト5、吸気カム6、可変バルブリフト機構50および可変カム位相機構70などで構成されている。
Next, the variable
この可変バルブリフト機構50(可動部駆動機構)は、吸気カムシャフト5の回転に伴って吸気弁4(可動部)を開閉駆動するとともに、バルブリフトLiftinを所定の最大値Liftinmaxと最小値Liftinminとの間で無段階に変更するものであり、シリンダ3aごとに設けられた四節リンク式のロッカアーム機構51と、これらのロッカアーム機構51を同時に駆動するリフトアクチュエータ60(図5参照)などを備えている。
The variable valve lift mechanism 50 (movable part drive mechanism) drives the intake valve 4 (movable part) to open and close as the
各ロッカアーム機構51は、ロッカアーム52および上下のリンク53,54などで構成されている。この上リンク53の一端部は、上ピン55を介して、ロッカアーム52の上端部に回動自在に取り付けられており、他端部は、ロッカアームシャフト56に回動自在に取り付けられている。このロッカアームシャフト56は、図示しないホルダを介して、シリンダヘッド3cに取り付けられている。
Each
また、ロッカアーム52の上ピン55上には、ローラ57が回動自在に設けられている。このローラ57は、吸気カム6のカム面に当接しており、吸気カム6が回転する際、そのカム面に案内されながら吸気カム6上を転動する。これにより、ロッカアーム52は上下方向に駆動されるとともに、上リンク53が、ロッカアームシャフト56を中心として回動する。
A
さらに、ロッカアーム52の吸気弁4側の端部には、アジャストボルト52aが取り付けられている。このアジャストボルト52aは、吸気カム6の回転に伴ってロッカアーム52が上下方向に移動すると、バルブスプリング4eの付勢力に抗しながら、ステム4aを上下方向に駆動し、吸気弁4を開閉する。
Further, an
また、下リンク54の一端部は、下ピン58を介して、ロッカアーム52の下端部に回動自在に取り付けられており、下リンク54の他端部には、連結ピン59が回動自在に取り付けられている。下リンク54は、この連結ピン59を介して、リフトアクチュエータ60の後述する短アーム65に連結されている。
One end of the
一方、リフトアクチュエータ60は、図5に示すように、モータ61、ナット62、リンク63、長アーム64および短アーム65などを備えている。このモータ61は、ECU2に接続され、エンジン3のヘッドカバー3gの外側に配置されている。モータ61の回転軸は、雄ねじが形成されたねじ軸61aになっており、このねじ軸61aに、ナット62が螺合している。このナット62は、リンク63を介して、長アーム64に連結されている。このリンク63の一端部は、ピン63aを介して、ナット62に回動自在に取り付けられ、他端部は、ピン63bを介して、長アーム64の一端部に回動自在に取り付けられている。
On the other hand, the
また、長アーム64の他端部は、回動軸66を介して短アーム65の一端部に取り付けられている。この回動軸66は、断面円形に形成され、エンジン3のヘッドカバー3gを貫通しているとともに、これに回動自在に支持されている。この回動軸66の回動に伴い、長アーム64および短アーム65はこれと一体に回動する。
The other end of the
さらに、短アーム65の他端部には、前述した連結ピン59が回動自在に取り付けられており、これにより、短アーム65は、連結ピン59を介して、下リンク54に連結されている。
Further, the above-described connecting
次に、以上のように構成された可変バルブリフト機構50の動作について説明する。この可変バルブリフト機構50では、ECU2からの後述するリフト制御入力Uliftinがリフトアクチュエータ60に入力されると、ねじ軸61aが回転し、それに伴うナット62の移動により、長アーム64および短アーム65が回動軸66を中心として回動するとともに、この短アーム65の回動に伴って、ロッカアーム機構51の下リンク54が、下ピン58を中心として回動する。すなわち、リフトアクチュエータ60により、下リンク54が駆動される。
Next, the operation of the variable
その際、ECU2の制御により、短アーム65の回動範囲は、図5(a)に示す最大リフト位置と図5(b)に示す最小リフト位置との間に規制され、それにより、下リンク54の回動範囲も、図4に実線で示す最大リフト位置と、図4に2点鎖線で示す最小リフト位置との間に規制される。
At that time, under the control of the
下リンク54が最大リフト位置にある場合、ロッカアームシャフト56、上下のピン55,58および連結ピン59によって構成される四節リンクでは、上ピン55および下ピン58の中心間の距離が、ロッカアームシャフト56および連結ピン59の中心間の距離よりも長くなるように構成されており、それにより、図6(a)に示すように、吸気カム6が回転すると、これとローラ57との当接点の移動量よりも、アジャストボルト52aの移動量の方が大きくなる。
When the
一方、下リンク54が最小リフト位置にある場合、上記四節リンクでは、上ピン55および下ピン58の中心間の距離が、ロッカアームシャフト56および連結ピン59の中心間の距離よりも短くなるように構成されており、それにより、図6(b)に示すように、吸気カム6が回転すると、これとローラ57との当接点の移動量よりも、アジャストボルト52aの移動量の方が小さくなる。
On the other hand, when the
以上の理由により、吸気弁4は、下リンク54が最大リフト位置にあるときには、最小リフト位置にあるときよりも大きなバルブリフトLiftinで開弁する。具体的には、吸気カム6の回転中、吸気弁4は、下リンク54が最大リフト位置にあるときには、図7の実線で示すバルブリフト曲線に従って開弁し、バルブリフトLiftinは、その最大値Liftinmaxを示す。一方、下リンク54が最小リフト位置にあるときには、図7の2点鎖線で示すバルブリフト曲線に従って開弁し、バルブリフトLiftinは、その最小値Liftinminを示す。
For the above reasons, the
したがって、この可変バルブリフト機構50では、アクチュエータ60を介して、下リンク54を最大リフト位置と最小リフト位置との間で回動させることにより、バルブリフトLiftinを、最大値Liftinmaxと最小値Liftinminとの間で無段階に変化させることができる。
Accordingly, in the variable
また、エンジン3には、回動角センサ23が設けられており(図2参照)、この回動角センサ23は、回動軸66すなわち短アーム65の回動角を検出して、その検出信号をECU2に出力する。ECU2は、この回動角センサ23の検出信号に基づき、バルブリフトLiftinを算出する。
The
次に、前述した可変カム位相機構70(可動部駆動機構)について説明する。この可変カム位相機構70は、可動部としての吸気カムシャフト5のクランクシャフト3dに対する相対的な位相(以下「カム位相」という)Cainを無段階に進角側または遅角側に変更するものであり、吸気カムシャフト5の吸気スプロケット側の端部に設けられている。図8に示すように、可変カム位相機構70は、ハウジング71、3枚羽根式のベーン72、油圧ポンプ73および電磁弁機構74などを備えている。
Next, the aforementioned variable cam phase mechanism 70 (movable part drive mechanism) will be described. This variable
このハウジング71は、吸気カムシャフト5上の吸気スプロケットと一体に構成されており、互いに等間隔に形成された3つの隔壁71aを備えている。ベーン72は、吸気カムシャフト5の吸気スプロケット側の端部に同軸に取り付けられ、吸気カムシャフト5から外方に放射状に延びているとともに、ハウジング71内に回転可能に収容されている。また、ハウジング71では、隔壁71aとベーン72との間に、3つの進角室75および3つの遅角室76が形成されている。
The
油圧ポンプ73は、クランクシャフト3dに連結された機械式のものであり、クランクシャフト3dが回転すると、それに伴って、エンジン3のオイルパン3eに蓄えられた潤滑用のオイルを、油路77cを介して吸い込むとともに、これを昇圧した状態で、油路77cを介して電磁弁機構74に供給する。
The
電磁弁機構74は、スプール弁機構74aおよびソレノイド74bを組み合わせたものであり、進角油路77aおよび遅角油路77bを介して、進角室75および遅角室76にそれぞれ接続されているとともに、油圧ポンプ73から供給された油圧を、進角油圧Padおよび遅角油圧Prtとして、進角室75および遅角室76にそれぞれ出力する。電磁弁機構74のソレノイド74bは、ECU2に電気的に接続されており、ECU2からの後述する位相制御入力Ucainが入力された際、スプール弁機構74aのスプール弁体を、位相制御入力Ucainに応じて所定の移動範囲内で移動させることにより、進角油圧Padおよび遅角油圧Prtをいずれも変化させる。
The
以上の可変カム位相機構70では、油圧ポンプ73の動作中、電磁弁機構74が後述する位相制御入力Ucainに応じて作動することにより、進角油圧Padが進角室75に、遅角油圧Prtが遅角室76にそれぞれ供給され、それにより、ベーン72とハウジング71との間の相対的な位相が進角側または遅角側に変更される。その結果、前述したカム位相Cainが、最遅角値Cainrt(例えばカム角0゜に相当する値)と最進角値Cainad(例えばカム角55゜分に相当する値)の間で連続的に変化し、それにより、吸気弁4のバルブタイミングは、図9に実線で示す最遅角タイミングと、図9に2点鎖線で示す最進角タイミングとの間で、無段階に変更される。
In the variable
なお、この可変カム位相機構70には、図示しないロック機構が設けられており、このロック機構により、油圧ポンプ73からの供給油圧が低いときには、可変カム位相機構70の動作がロックされる。すなわち、可変カム位相機構70によるカム位相Cainの変更が禁止され、カム位相Cainがアイドル運転やエンジン始動に適した値にロックされる。
The variable
以上のように、本実施形態の可変式吸気動弁機構40では、可変バルブリフト機構50により、バルブリフトLiftinが無段階に変更されるとともに、可変カム位相機構70により、カム位相Cainすなわち吸気弁4のバルブタイミングが前述した最遅角タイミングと最進角タイミングとの間で、無段階に変更される。また、ECU2により、後述するように、可変バルブリフト機構50および可変カム位相機構70を介して、バルブリフトLiftinおよびカム位相Cainがそれぞれ制御される。
As described above, in the variable
一方、吸気カムシャフト5の可変カム位相機構70と反対側の端部には、カム角センサ24(図2参照)が設けられている。このカム角センサ24は、例えばマグネットロータおよびMREピックアップで構成されており、吸気カムシャフト5の回転に伴い、パルス信号であるCAM信号を所定のカム角(例えば1゜)ごとにECU2に出力する。ECU2は、このCAM信号および前述したCRK信号に基づき、カム位相Cainを算出する。
On the other hand, a cam angle sensor 24 (see FIG. 2) is provided at the end of the
次に、図10を参照しながら、前述した可変圧縮比機構80(可動部駆動機構)について説明する。この可変圧縮比機構80は、可動部としてのピストン3bの上死点位置すなわちピストン3bのストロークを変更することにより、圧縮比Crを所定の最大値Crmaxと最小値Crminとの間で無段階に変更するものであり、ピストン3bとクランクシャフト3dの間に連結された複合リンク機構81と、複合リンク機構81の動きを制御するための制御軸85と、制御軸85を駆動するための圧縮比アクチュエータ87などで構成されている。
Next, the aforementioned variable compression ratio mechanism 80 (movable part drive mechanism) will be described with reference to FIG. The variable
複合リンク機構81は、上リンク82、下リンク83および制御リンク84などで構成されている。上リンク82は、いわゆるコンロッドに相当するものであり、その上端部がピストンピン3fを介してピストン3bに回動自在に連結され、下端部がピン83aを介して、下リンク83の一端部に回動自在に連結されている。
The
下リンク83は、三角形状のものであり、上リンク82との連結端部以外の2つの端部はそれぞれ、クランクピン83bを介してクランクシャフト3dに、制御ピン83cを介して制御リンク84の一端部に回動自在に連結されている。以上の構成により、ピストン3bの往復運動が、複合リンク機構81を介してクランクシャフト3dに伝達され、クランクシャフト3dの回転運動に変換される。
The
また、制御軸85は、クランクシャフト3dと同様に、図中の奥行き方向に延びており、シリンダブロックに回動自在に支持された回動軸部85aと、これと一体の偏心軸部85bおよびアーム86を備えている。この偏心軸部85bには、制御リンク84の下端部が回動自在に連結されている。また、アーム86の先端部は、フォーク部86aになっており、このフォーク部86aには、圧縮比アクチュエータ87の駆動軸87bの先端部が回動自在に連結されている。
Similarly to the
圧縮比アクチュエータ87は、モータおよび減速機構(いずれも図示せず)を組み合わせたものであり、これらを内蔵するケーシング87aと、このケーシング87aから出没する方向に移動可能な駆動軸87bなどを備えている。この圧縮比アクチュエータ87では、ECU2からの後述する圧縮比制御入力Ucrによってモータが正逆回転方向に駆動されると、駆動軸87bが、ケーシング87aから最も突出する低圧縮比位置(図10(a)に示す位置)と、ケーシング87a側に最も退避する高圧縮比位置(図10(b)に示す位置)との間で移動する。
The
以上の構成により、この可変圧縮比機構80では、アクチュエータ87の駆動軸87bが、低圧縮比位置から高圧縮比位置側に移動すると、アーム86を介して、制御軸85が回動軸部85aを中心として図中の反時計回りに回動するように駆動され、それに伴い、偏心軸部85bが下方に移動する。それにより、制御リンク84全体が押し下げられるのに伴い、下リンク83がクランクピン83bを中心として図中の時計回りに回動するとともに、上リンク82がピストンピン3fを中心として図中の反時計回りに回動する。その結果、ピストンピン3f、上ピン83aおよびクランクピン83bが、低圧縮比位置のときよりも直線状に近づくことで、ピストン3bが上死点に到達したときのピストンピン3fとクランクピン83bを結ぶ直線距離が長くなり(すなわちピストン3bのストロークが長くなり)、燃焼室の容積が小さくなることによって、圧縮比Crが高くなる。
With the above-described configuration, in the variable
一方、上記とは逆に、アクチュエータ87の駆動軸87bが、高圧縮比位置から低圧縮比位置側に移動すると、回動軸部85aが図中の時計回りに回動し、それに伴い、偏心軸部85bが上方に移動することで、制御リンク84全体が押し上げられる。これにより、上記とは全く逆の動作により、下リンク83が、反時計回りに回動するとともに、上リンク82が時計回りに回動する。これにより、ピストン3bが上死点に到達したときのピストンピン3fとクランクピン83bを結ぶ直線距離が短くなり(すなわちピストン3bのストロークが短くなり)、燃焼室の容積が大きくなることによって、圧縮比Crが低くなる。以上のように、この可変圧縮比機構80では、制御軸85の回動角を変更することにより、圧縮比Crが前述した所定の最大値Crmaxと最小値Crminとの間で無段階に変更される。
On the other hand, contrary to the above, when the
また、エンジン3には、制御軸85の付近に、制御角センサ25が設けられており(図2参照)、この制御角センサ25は、制御軸85の回動角を表す検出信号をECU2に出力する。ECU2は、この制御角センサ25の検出信号に基づき、圧縮比Crを算出する。
Further, the
さらに、図2に示すように、ECU2には、アクセル開度センサ26およびイグニッション・スイッチ(以下「IG・SW」という)27が接続されている。このアクセル開度センサ26は、車両の図示しないアクセルペダルの踏み込み量(以下「アクセル開度」という)APを表す検出信号をECU2に出力する。また、IG・SW27は、イグニッションキー(図示せず)操作によりON/OFFされるとともに、そのON/OFF状態を表す信号をECU2に出力する。
Further, as shown in FIG. 2, an
ECU2は、CPU2a、RAM2b、ROM2c(外乱補償値記憶手段)およびI/Oインターフェース(図示せず)などからなるマイクロコンピュータで構成されており、前述した各種のセンサ20〜26の検出信号およびIG・SW27のON/OFF信号などに応じて、エンジン3の運転状態を判別するとともに、各種の制御を実行する。具体的には、ECU2は、後述するように、可変カム位相機構70および可変バルブリフト機構50を介して、カム位相CainおよびバルブリフトLiftinをそれぞれ制御するとともに、可変圧縮比機構80を介して、圧縮比Crを制御する。また、運転状態に応じて、点火プラグ13の点火時期を制御する。
The
なお、本実施形態では、ECU2により、外乱補償値記憶手段、外乱補償値選択手段、制御入力算出手段、目標カム位相設定手段、目標バルブリフト設定手段および目標圧縮比設定手段が構成されている。また、本実施形態では、カム位相Cainが、可動部の動作タイミング、カム位相パラメータおよび負荷パラメータに相当し、バルブリフトLiftinが、可動部の動作量、バルブリフトパラメータおよび負荷パラメータに相当する。
In this embodiment, the
次に、本実施形態の制御装置1について説明する。この制御装置1は、カム位相コントローラ100(図11参照)、バルブリフトコントローラ110(図22参照)および圧縮比コントローラ120(図25参照)を備えており、これらはいずれも、具体的には、ECU2により構成されている。まず、カム位相コントローラ100について説明すると、このカム位相コントローラ100は、図11に示すように、目標カム位相算出部101、補償要素102、2自由度スライディングモードコントローラ(以下「2自由度SLDコントローラ」という)103、加算要素104、およびDSMコントローラ105を備えている。
Next, the
このカム位相コントローラ100では、以下に述べるように、位相制御入力Ucainが算出されるとともに、この位相制御入力Ucainが可変カム位相機構70に入力されることにより、カム位相Cainが目標カム位相Cain_cmdになるように制御される。
In the
まず、目標カム位相算出部101(目標カム位相設定手段)では、目標カム位相Cain_cmd(カム位相パラメータ)が、エンジン回転数NEおよびアクセル開度APに応じて、後述するマップ(図33参照)を検索することにより算出される。 First, in the target cam phase calculation unit 101 (target cam phase setting means), a target cam phase Cain_cmd (cam phase parameter) is set on a map (see FIG. 33) described later according to the engine speed NE and the accelerator pedal opening AP. Calculated by searching.
また、補償要素102(外乱補償値記憶手段、外乱補償値選択手段)では、後述するように、上記目標カム位相算出部101で算出された目標カム位相Cain_cmdなどに応じて、カム位相制御用の外乱補償値Rcyc_cinが算出される。
Further, in the compensation element 102 (disturbance compensation value storage means, disturbance compensation value selection means), as described later, cam phase control is performed in accordance with the target cam phase Cain_cmd calculated by the target cam
さらに、2自由度SLDコントローラ103(制御入力算出手段)では、目標カム位相Cain_cmdおよびカム位相Cainに応じて、後述する制御アルゴリズムにより、カム位相制御用のSLD制御入力Rsldが算出される。 Further, in the two-degree-of-freedom SLD controller 103 (control input calculation means), an SLD control input Rsld for cam phase control is calculated by a control algorithm described later according to the target cam phase Cain_cmd and the cam phase Cain.
一方、加算要素104(制御入力算出手段)では、補償要素102で算出されたカム位相制御用の外乱補償値Rcyc_cinと、2自由度SLDコントローラ103で算出されたカム位相制御用のSLD制御入力Rsldとの和として、カム位相制御用の参照入力Rsld_f(制御入力)が算出される。さらに、DSMコントローラ105では、このカム位相制御用の参照入力Rsld_fに応じて、後述する制御アルゴリズムにより、位相制御入力Ucainが算出される。
On the other hand, in the addition element 104 (control input calculation means), the disturbance compensation value Rcyc_cin for cam phase control calculated by the
次に、前述した補償要素102について説明する。この補償要素102では、以下に述べるように、カム位相制御用の外乱補償値Rcyc_cinが、目標カム位相Cain_cmd、クランク角カウンタの計数値C_crk、バルブリフトLiftinおよびエンジン回転数NEに応じて、算出される。なお、クランク角カウンタは、クランク角を計数するためのアップカウンタであり、その計数値C_crkは、後述するように、CRK信号の発生に同期して値10ずつインクリメントされるとともに、値720に達したときに値0にリセットされる。
Next, the
このカム位相制御用の外乱補償値Rcyc_cinは、エンジン3の運転中、吸気カムシャフト5の回転、すなわち吸気カム6の回転に伴って周期的に発生すると予想される周期的外乱を補償するためのものである。以下、周期的外乱およびそれを補償するための外乱補償値Rcyc_cinの算出手法を説明する。まず、理解の容易化のために、1つのシリンダ3aにおける場合(言い換えれば、単気筒エンジンの場合)を例にとって、図12〜図17を参照しながら説明する。図12(a)に示すように、吸気カム6が、図中の矢印Y1方向に回転し、吸気弁4を開弁方向に駆動している状態では、吸気カム6は、吸気弁4のバルブスプリング4eの反力に起因して、図中の矢印Y2方向への回転モーメントとして作用する外乱を受ける。
This disturbance compensation value Rcyc_cin for controlling the cam phase is used to compensate for periodic disturbances that are expected to occur periodically with the rotation of the
一方、図12(b)に示すように、吸気カム6が吸気弁4を閉弁方向に駆動している状態では、吸気カム6は、吸気弁4のバルブスプリング4eの付勢力に起因して、図中の矢印Y3方向への回転モーメントとして作用する外乱を受ける。以上のような外乱は、吸気カムシャフト5の回転に伴って周期的に発生し、その振幅も周期的に変化するので、以下、周期的外乱という。
On the other hand, as shown in FIG. 12B, when the
ここで、カム位相Cainが目標カム位相Cain_cmdに収束するようにフィードバック制御を実行している場合において、以上のような周期的外乱を受けると、図13に示すように、目標カム位相Cain_cmdが一定に保持されているにもかかわらず、カム位相Cainが、吸気カム6により吸気弁4が開弁側に駆動されている間は遅角側にずれ、閉弁側に駆動されている間は進角側にずれてしまう
Here, when feedback control is executed so that the cam phase Cain converges to the target cam phase Cain_cmd, when the periodic disturbance as described above is received, the target cam phase Cain_cmd is constant as shown in FIG. The cam phase Cain is shifted to the retard side while the
このようなカム位相Cainのずれが発生すると、吸気弁4のバルブタイミングが、可変カム位相機構70がない場合と比べて変化してしまう。具体的には、図14および図15に示すように、吸気弁4のバルブリフト曲線は、エンジン3が可変カム位相機構70を備えている場合(図中に実線で示す曲線の場合)、これを備えていない場合(図中に破線で示す曲線)と比べて、吸気弁4の開弁時間が短くなり、その結果、吸入空気量が変化することで、エンジン3の発生トルクが変動してしまうとともに、燃焼状態が不安定になってしまうおそれがある。
When such a cam phase Cain shift occurs, the valve timing of the
これを回避するために、例えば吸気カム6のカムプロフィールを予め変更することが考えられる。しかし、図14および図15に示すバルブリフト曲線を比較すると明らかなように、エンジン3が可変バルブリフト機構50を備えている場合、バルブリフトLiftinが所定の高リフト側の値に制御されているとき(図14に示すバルブリフト曲線のとき)と、バルブリフトLiftinが所定の低リフト側の値に制御されているとき(図15に示すバルブリフト曲線のとき)とでは、吸気弁4のバルブタイミングの変化度合いが互いに異なってしまう。このため、本実施形態のように、エンジン3が可変カム位相機構70および可変バルブリフト機構50を双方とも備えている場合、吸気カム6のカムプロフィールを変更することで、周期的外乱の影響を回避することは困難である。
In order to avoid this, for example, it is conceivable to change the cam profile of the
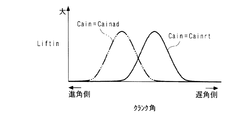
本実施形態では、以上のような周期的外乱が可変カム位相機構70に加えられた際の影響を回避するために、可変カム位相機構70に加えられる周期的外乱の値を予測するとともに、その予測値の符号の正負を反転した値に相当する値を、カム位相制御用の外乱補償値Rcyc_cinとして算出する。具体的には、カム位相制御用の外乱補償値Rcyc_cinは、バルブリフトLiftin、クランク角カウンタの計数値C_crkおよび目標カム位相Cain_cmdに応じて、外乱補償値マップを検索することによりマップ値Rcyc_bs_cinを算出し、そのマップ値Rcyc_bs_cinをエンジン回転数NEに応じて補正することにより算出される。
In this embodiment, in order to avoid the influence when the periodic disturbance as described above is applied to the variable
この外乱補償値マップとしては、図16に実線で示すCain_cmd=Cainrt&Liftin=Liftinmax用のマップ値Rcyc_bs_cinと、図17に実線で示すCain_cmd=Cainrt&Liftin=Liftinmin用のマップ値Rcyc_bs_cinと、Cain_cmd=Cainrtで、かつバルブリフトLiftinが最大値Liftinmaxと最小値Liftinminとの間にあるときの補間演算用の、複数段階のLiftinの値にそれぞれ対応して設定された複数のマップ値Rcyc_bs_cin(図示せず)と、を備えたものを用いる。 As the disturbance compensation value map, a map value Rcyc_bs_cin for Cain_cmd = Cainrt & Liftin = Liftinmax shown by a solid line in FIG. 16, a map value Rcyc_bs_cin for Cain_cmd = Cainrt & Liftin = Liftinmin shown by a solid line in FIG. A plurality of map values Rcyc_bs_cin (not shown) set in correspondence with a plurality of stages of Liftin values for interpolation calculation when the valve lift Liftin is between the maximum value Liftinmax and the minimum value Liftinmin. Use what you have.
以上の外乱補償値マップを検索する際、目標カムCain_cmdが最遅角値Cainrtよりも進角側の値であるときには、周期的外乱の発生周期が進角側(図中の左側)にずれるので、外乱補償値もそれに応じて、例えば図16,17中の2点鎖線で示す値のように補正する必要がある。したがって、本実施形態の外乱補償値マップの検索では、目標カムCain_cmdの最遅角値Cainrtに対する進角度合いを加味して、クランク角カウンタの計数値C_crkを補正する。そして、そのように補正した計数値C_crkおよびバルブリフトLiftinに応じて、上記のマップ値Rcyc_bs_cinのうちの、そのときのバルブリフトLiftinに近い2つのマップ値Rcyc_bs_cinを選択するとともに、当該2つの選択値の補間演算により、カム位相制御用の外乱補償値のマップ値Rcyc_bs_cinを算出する。さらに、以上のように算出したマップ値Rcyc_bs_cinを、後述するように、エンジン回転数NEに応じて補正することにより、カム位相制御用の外乱補償値Rcyc_cinが算出される。 When searching for the above disturbance compensation value map, if the target cam Cain_cmd is a value on the advance side of the most retarded angle value Cainrt, the periodic disturbance occurrence period is shifted to the advance side (left side in the figure). The disturbance compensation value also needs to be corrected accordingly, for example, as indicated by a two-dot chain line in FIGS. Therefore, in the search for the disturbance compensation value map of the present embodiment, the count value C_crk of the crank angle counter is corrected in consideration of the advance angle degree of the target cam Cain_cmd with respect to the most retarded angle value Cainrt. Then, two map values Rcyc_bs_cin that are close to the valve lift Liftin at that time out of the map values Rcyc_bs_cin are selected according to the count value C_crk and the valve lift Liftin corrected as described above, and the two selection values are selected. The map value Rcyc_bs_cin of the disturbance compensation value for cam phase control is calculated by the interpolation calculation. Further, as described later, the map value Rcyc_bs_cin calculated as described above is corrected according to the engine speed NE to calculate a disturbance compensation value Rcyc_cin for cam phase control.
1つのシリンダ3aで発生する周期的外乱を補償するための、カム位相制御用の外乱補償値Rcyc_cinは、以上のように算出することが考えられる。これに対して、本実施形態のエンジン3は、4気筒タイプのものであるため、周期的外乱も1制御サイクル中にシリンダ3aごとに計4回、発生するとともに、互いの位相差に起因して互いに重なり合う状態で発生する。したがって、本実施形態では、そのような周期的外乱を補償するために、外乱補償値マップとして、前述したものに代えて、図18に示すCain_cmd=Cainrt&Liftin=Liftinmax用のマップ値Rcyc_bs_cinと、図19に示すCain_cmd=Cainrt&Liftin=Liftinmin用のマップ値Rcyc_bs_cinと、Cain_cmd=Cainrtで、かつバルブリフトLiftinが最大値Liftinmaxと最小値Liftinminとの間にあるときの補間演算用の、複数段階のLiftinの値にそれぞれ対応して設定された複数のマップ値Rcyc_bs_cin(図示せず)と、を備えたものを用いる。
It can be considered that the disturbance compensation value Rcyc_cin for cam phase control for compensating for the periodic disturbance generated in one cylinder 3a is calculated as described above. On the other hand, since the
図18,19を参照すると明らかなように、この外乱補償値マップでは、カム位相制御用の外乱補償値のマップ値Rcyc_bs_cinは、周期的外乱の予測結果に応じ、クランク角カウンタの計数値C_crkに対応する値として設定されている。すなわち、マップ値Rcyc_bs_cinは、周期的外乱の予測結果に応じて時系列的に設定されている。また、マップ値Rcyc_bs_cinの周期は、クランク角180゜分に設定されている。これは、前述した理由により、可変カム位相機構70に加えられる周期的外乱の周期が、クランク角180゜分となることによる。なお、この外乱補償値マップは、ROM2c内に予め記憶されている。
As is apparent from FIGS. 18 and 19, in this disturbance compensation value map, the map value Rcyc_bs_cin of the disturbance compensation value for cam phase control is set to the count value C_crk of the crank angle counter according to the prediction result of the periodic disturbance. It is set as the corresponding value. That is, the map value Rcyc_bs_cin is set in time series according to the prediction result of the periodic disturbance. Further, the cycle of the map value Rcyc_bs_cin is set to a crank angle of 180 °. This is because the period of the periodic disturbance applied to the variable
さらに、外乱補償値マップの検索は、前述した手法と同様に実行される。すなわち、クランク角カウンタの計数値C_crkを、目標カムCain_cmdの最遅角値Cainrtに対する進角度合いを加味して補正し、その補正した計数値C_crkおよびバルブリフトLiftinに応じて、上記のマップ値Rcyc_bs_cinのうちの、そのときのバルブリフトLiftinに近い2つのマップ値Rcyc_bs_cinを選択し、当該2つの選択値の補間演算により、カム位相制御用の外乱補償値のマップ値Rcyc_bs_cin(外乱補償値)を算出する。さらに、以上のように算出したマップ値Rcyc_bs_cinを、後述するように、エンジン回転数NEに応じて補正することにより、カム位相制御用の外乱補償値Rcyc_cinが算出される。以上により、カム位相制御用の外乱補償値Rcyc_cinは、周期的外乱の予測値の符号の正負を反転した値に相当するものとして算出される。なお、後述するように、カム位相制御用の外乱補償値Rcyc_cinの算出は、CRK信号の発生に同期するタイミングで実行される。 Further, the search for the disturbance compensation value map is executed in the same manner as described above. That is, the count value C_crk of the crank angle counter is corrected in consideration of the advance angle of the target cam Cain_cmd with respect to the most retarded angle value Cainrt, and the map value Rcyc_bs_cin is determined according to the corrected count value C_crk and the valve lift Liftin. The map value Rcyc_bs_cin (disturbance compensation value) of the disturbance compensation value for cam phase control is calculated by selecting two map values Rcyc_bs_cin that are close to the valve lift Liftin at that time and interpolating the two selected values. To do. Further, as described later, the map value Rcyc_bs_cin calculated as described above is corrected according to the engine speed NE to calculate a disturbance compensation value Rcyc_cin for cam phase control. As described above, the disturbance compensation value Rcyc_cin for cam phase control is calculated as corresponding to a value obtained by inverting the sign of the predicted value of the periodic disturbance. As will be described later, the calculation of the disturbance compensation value Rcyc_cin for cam phase control is executed at a timing synchronized with the generation of the CRK signal.
次に、前述した2自由度SLDコントローラ103について説明する。この2自由度SLDコントローラ103では、目標カム位相Cain_cmdおよびカム位相Cainに応じて、目標値フィルタ型2自由度スライディングモード制御アルゴリズム[図20に示す式(1)〜(8)]により、カム位相制御用のSLD制御入力Rsldが算出される。
Next, the two-degree-of-
これらの式(1)〜(8)において、記号(k)付きの各離散データは、所定の制御周期ΔT(本実施形態では5msec)に同期してサンプリング(または算出)されたデータであることを示しており、記号kは各離散データのサンプリングサイクルの順番を表している。例えば、記号kは今回の制御タイミングでサンプリングされた値であることを、記号k−1は前回の制御タイミングでサンプリングされた値であることをそれぞれ示している。この点は、以下の離散データにおいても同様である。なお、以下の説明では、各離散データにおける記号(k)などを適宜、省略する。 In these formulas (1) to (8), each discrete data with the symbol (k) is data sampled (or calculated) in synchronization with a predetermined control period ΔT (5 msec in this embodiment). The symbol k represents the order of the sampling cycle of each discrete data. For example, the symbol k indicates a value sampled at the current control timing, and the symbol k-1 indicates a value sampled at the previous control timing. This also applies to the following discrete data. In the following description, the symbol (k) in each discrete data is omitted as appropriate.
この制御アルゴリズムでは、まず、式(1)に示す一次遅れフィルタアルゴリズムにより、目標カム位相のフィルタ値Cain_cmd_fが算出される。同式(1)において、POLE_fは、目標値フィルタ設定パラメータであり、−1<POLE_f<0の関係が成立する値に設定される。 In this control algorithm, first, the filter value Cain_cmd_f of the target cam phase is calculated by the first-order lag filter algorithm shown in Expression (1). In the equation (1), POLE_f is a target value filter setting parameter, and is set to a value that satisfies the relationship of −1 <POLE_f <0.
次いで、式(2)〜(8)に示すスライディングモード制御アルゴリズムにより、カム位相制御用のSLD制御入力Rsldが算出される。すなわち、式(2)に示すように、カム位相制御用のSLD制御入力Rsldは、等価制御入力Req、到達則入力Rrch、適応則入力Radpおよび非線形入力Rnlの総和として算出される。この等価制御入力Reqは、式(3)により算出される。同式(3)において、a1,a2,b1,b2は、後述するモデルのモデルパラメータを示しており、これらは所定値に設定されている。さらに、式(3)において、POLEは、切換関数設定パラメータであり、−1<POLE_f<POLE<0の関係が成立する値に設定されている。 Next, the SLD control input Rsld for cam phase control is calculated by the sliding mode control algorithm expressed by the equations (2) to (8). That is, as shown in Expression (2), the SLD control input Rsld for cam phase control is calculated as the sum of the equivalent control input Req, the reaching law input Rrch, the adaptive law input Radp, and the nonlinear input Rnl. This equivalent control input Req is calculated by the equation (3). In the equation (3), a1, a2, b1, and b2 indicate model parameters of a model to be described later, and these are set to predetermined values. Further, in Expression (3), POLE is a switching function setting parameter, and is set to a value that satisfies the relationship of −1 <POLE_f <POLE <0.
また、到達則入力Rrchは、式(4)により算出される。この式(4)において、Krchは、所定の到達則ゲインを表しており、σsは、式(7)のように定義される切換関数である。 The reaching law input Rrch is calculated by the equation (4). In this equation (4), Krch represents a predetermined reaching law gain, and σs is a switching function defined as in equation (7).
さらに、適応則入力Radpは、式(5)により算出され、この式(5)において、Kadpは、所定の適応則ゲインを表している。一方、非線形入力Rnlは、式(6)により算出される。この式(6)において、Knlは、所定の非線形ゲインを表しているとともに、sgn(σs)は、符号関数を表しており、その値は、σs≧0のときにはsgn(σs)=1となり、σs<0のときにはsgn(σs)=−1となる(なお、σs=0のときに、sgn(σs)=0と設定してもよい)。 Furthermore, the adaptive law input Radp is calculated by the equation (5). In this equation (5), Kadp represents a predetermined adaptive law gain. On the other hand, the nonlinear input Rnl is calculated by the equation (6). In this equation (6), Knl represents a predetermined nonlinear gain, sgn (σs) represents a sign function, and its value is sgn (σs) = 1 when σs ≧ 0, When σs <0, sgn (σs) = − 1 (when σs = 0, sgn (σs) = 0 may be set).
なお、以上の式(1)〜(8)は以下のように導出される。すなわち、制御対象を、カム位相制御用のSLD制御入力Rsldを入力とし、カム位相Cainを出力とする系として定義するとともに、離散時間系モデルとしてモデル化すると、図20に示す式(9)が得られる。この式(9)のモデルに基づき、カム位相Cainが目標カム位相Cain_cmdに収束するように、目標値フィルタ型2自由度スライディングモード制御理論を適用すると、前述した式(1)〜(8)が導出される。 The above formulas (1) to (8) are derived as follows. That is, when the control target is defined as a system in which the SLD control input Rsld for cam phase control is an input and the cam phase Cain is an output, and is modeled as a discrete time system model, the equation (9) shown in FIG. can get. When the target value filter type two-degree-of-freedom sliding mode control theory is applied so that the cam phase Cain converges to the target cam phase Cain_cmd based on the model of the formula (9), the above-described formulas (1) to (8) are obtained. Derived.
一方、前述した加算要素104では、図21の式(10)に示すように、以上のように算出されたカム位相制御用の外乱補償値Rcyc_cinおよびカム位相制御用のSLD制御入力Rsldの和として、カム位相制御用の参照入力Rsld_fが算出される。
On the other hand, in the
次に、前述したDSMコントローラ105について説明する。このDSMコントローラ105では、図21の式(11)〜(16)で表される、ΔΣ変調アルゴリズムに基づいた制御アルゴリズムにより、位相制御入力Ucainが算出される。なお、これらの式(11)〜(16)の制御アルゴリズムは、本出願人が特願2003−293009号において提案済みの制御アルゴリズムを適用したものである。
Next, the
図21の式(11)において、Lim(Rsld_f)は、カム位相制御用の参照入力Rsld_fをリミット処理した制限値を表しており、具体的には、カム位相制御用の参照入力Rsld_fを、所定の下限値Rminと所定の上限値Rmaxで規定される範囲内に制限した値として算出される。すなわち、Rsld_f<RminのときにはLim(Rsld_f)=Rminとなり、Rmin≦Rsld_f≦RmaxのときにはLim(Rsld_f)=Rsld_fとなり、Rsld_f>RmaxのときにはLim(Rsld_f)=Rmaxとなる。これらの上限値Rmaxおよび下限値Rminは、絶対値が互いに等しい正負の所定値に設定されている。 In Expression (11) of FIG. 21, Lim (Rsld_f) represents a limit value obtained by limiting the reference input Rsld_f for cam phase control. Specifically, the reference input Rsld_f for cam phase control is set to a predetermined value. Is calculated as a value limited within a range defined by a lower limit value Rmin and a predetermined upper limit value Rmax. That is, Lim (Rsld_f) = Rmin when Rsld_f <Rmin, Lim (Rsld_f) = Rsld_f when Rmin ≦ Rsld_f ≦ Rmax, and Lim (Rsld_f) = Rmax when Rsld_f> Rmax. The upper limit value Rmax and the lower limit value Rmin are set to positive and negative predetermined values whose absolute values are equal to each other.
また、式(12)において、r2は制限値偏差を、udsm_oftは所定のオフセット値をそれぞれ表している。さらに、式(13)において、δは偏差信号値を表しており、同式(13)に示すように、制限値偏差r2と変調出力uの前回値との偏差として算出される。 In Expression (12), r2 represents a limit value deviation, and udsm_of represents a predetermined offset value. Further, in equation (13), δ represents a deviation signal value, and is calculated as a deviation between the limit value deviation r2 and the previous value of the modulation output u as shown in equation (13).
一方、式(14)において、σは、偏差信号値δの積分値である偏差積分値を表しており、同式に示すように、その前回値と偏差信号値δとの和として算出される。また、式(15)において、fnl(σ)は、非線形関数であり、その値は、σ≧0のときにはfnl(σ)=Rとなり、σ<0のときにはfnl(σ)=−Rとなる(なお、σ=0のときには、fnl(σ)=0と設定してもよい)。また、この値Rは、R>|r2|の関係が常に成立するような値に設定されている。 On the other hand, in equation (14), σ represents a deviation integral value that is an integral value of the deviation signal value δ, and is calculated as the sum of the previous value and the deviation signal value δ, as shown in the equation. . In Equation (15), fnl (σ) is a non-linear function, and its value is fnl (σ) = R when σ ≧ 0, and fnl (σ) = − R when σ <0. (When σ = 0, fnl (σ) = 0 may be set). The value R is set to a value that always satisfies the relationship R> | r2 |.
本実施形態のDSMコントローラ105では、以上の制御アルゴリズムにより、位相制御入力Ucainが、所定の上限値と下限値との間で頻繁に反転を繰り返す値として算出され、それにより、カム位相制御の制御精度を向上させることができる。
In the
次に、前述したバルブリフトコントローラ110について説明する。このバルブリフトコントローラ110は、図22に示すように、目標バルブリフト算出部111、補償要素112、2自由度SLDコントローラ113、加算要素114、およびDSMコントローラ115を備えている。
Next, the
このバルブリフトコントローラ110では、以下に述べるように、リフト制御入力Uliftinが算出されるとともに、このリフト制御入力Uliftinが可変バルブリフト機構50に入力されることにより、バルブリフトLiftinが目標バルブリフトLiftin_cmdになるように制御される。
In the
まず、目標バルブリフト算出部111(目標バルブリフト設定手段)では、目標バルブリフトLiftin_cmd(バルブリフトパラメータ)が、エンジン回転数NEおよびアクセル開度APに応じて、後述するマップ(図34参照)を検索することにより算出される。 First, in the target valve lift calculation unit 111 (target valve lift setting means), the target valve lift Liftin_cmd (valve lift parameter) is displayed on a map (see FIG. 34) described later according to the engine speed NE and the accelerator pedal opening AP. Calculated by searching.
また、補償要素112(外乱補償値記憶手段、外乱補償値選択手段)では、以下に述べるように、バルブリフト制御用の外乱補償値Rcyc_linが算出される。このバルブリフト制御用の外乱補償値Rcyc_linは、前述したカム位相制御用の外乱補償値Rcyc_cinと同様に、エンジン3の運転中、吸気カム6の回転に伴って発生する周期的外乱の影響を補償するためのものである。すなわち、そのような周期的外乱が可変バルブリフト機構50に加えられると、バルブリフトLiftinの変動に起因して、吸入空気量が変化してしまうので、そのような吸入空気量の変化を回避するために、可変バルブリフト機構50に加えられる周期的外乱の値を予測するとともに、その予測値の符号の正負を反転した値に相当する値を、バルブリフト制御用の外乱補償値Rcyc_linとして算出する。
In addition, the compensation element 112 (disturbance compensation value storage means, disturbance compensation value selection means) calculates a disturbance compensation value Rcyc_lin for valve lift control as described below. The disturbance compensation value Rcyc_lin for the valve lift control compensates for the influence of the periodic disturbance generated by the rotation of the
具体的には、バルブリフト制御用の外乱補償値Rcyc_linは、前述した補償要素102と同様の手法により、算出される。すなわち、まず、カム位相Cain、計数値C_crkおよび目標バルブリフトLiftin_cmdに応じて、外乱補償値マップを検索することによりマップ値Rcyc_bs_lin(外乱補償値)を算出する。
Specifically, the disturbance compensation value Rcyc_lin for valve lift control is calculated by a method similar to that of the
この補償要素112では、外乱補償値マップとして、図23に示すLiftin_cmd=Liftinmax&Cain=Cainrt用のマップ値Rcyc_bs_linと、図24に示すLiftin_cmd=Liftinmin&Cain=Cainrt用のマップ値Rcyc_bs_linと、Cain=Cainrtで、かつ目標バルブリフトLiftin_cmdが最大値Liftinmaxと最小値Liftinminとの間にあるときの補間演算用の、複数段階のLiftin_cmdの値にそれぞれ対応して設定された複数のマップ値Rcyc_bs_lin(図示せず)とを備えたものを用いる。なお、この外乱補償値マップは、ROM2c内に予め記憶されている。
In this
以上の外乱補償値マップの検索では、カム位相Cainの最遅角値Cainrtに対する進角度合いに応じて、クランク角カウンタの計数値C_crkを補正し、そのように補正した計数値C_crkおよび目標バルブリフトLiftin_cmdに応じて、上記のマップ値Rcyc_bs_linのうちの、そのときの目標バルブリフトLiftin_cmdに近い2つのマップ値を選択し、当該2つの選択値の補間演算により、バルブリフト制御用の外乱補償値のマップ値Rcyc_bs_linを算出する。 In the search for the disturbance compensation value map described above, the count value C_crk of the crank angle counter is corrected in accordance with the advance angle of the cam phase Cain with respect to the most retarded angle value Cainrt, and the corrected count value C_crk and target valve lift are corrected accordingly. According to Liftin_cmd, two map values close to the target valve lift Liftin_cmd at that time are selected from the map values Rcyc_bs_lin, and the disturbance compensation value for valve lift control is calculated by interpolation between the two selected values. The map value Rcyc_bs_lin is calculated.
次いで、以上のように算出したマップ値Rcyc_bs_linを、後述するように、エンジン回転数NEに応じて補正することにより、バルブリフト制御用の外乱補償値Rcyc_lin(補正した外乱補償値)が算出される。なお、後述するように、このバルブリフト制御用の外乱補償値Rcyc_linの算出は、CRK信号の発生に同期するタイミングで実行される。 Next, as described later, the map value Rcyc_bs_lin calculated as described above is corrected according to the engine speed NE to calculate a disturbance compensation value Rcyc_lin (corrected disturbance compensation value) for valve lift control. . As will be described later, the calculation of the disturbance compensation value Rcyc_lin for valve lift control is performed at a timing synchronized with the generation of the CRK signal.
一方、2自由度SLDコントローラ113(制御入力算出手段)では、目標バルブリフトLiftin_cmdおよびバルブリフトLiftinに応じて、前述した2自由度SLDコントローラ103の制御アルゴリズム[式(1)〜(8)]と同様の目標値フィルタ型2自由度スライディングモード制御アルゴリズムにより、バルブリフト制御用のSLD制御入力Rsld’が算出される。
On the other hand, in the two-degree-of-freedom SLD controller 113 (control input calculating means), according to the target valve lift Liftin_cmd and the valve lift Liftin, the control algorithm [Expressions (1) to (8)] of the two-degree-of-
すなわち、この2自由度SLDコントローラ113では、前述した図20の式(1)〜(8)において、カム位相Cain、目標カム位相Cain_cmdおよびカム位相制御用のSLD制御入力Rsldをそれぞれ、バルブリフトLiftin、目標バルブリフトLiftin_cmdおよびバルブリフト制御用のSLD制御入力Rsld’に置き換えるとともに、各種の変数、パラメータおよび所定の設定値をそれぞれ、バルブリフト制御用の値に置き換えたアルゴリズムにより、バルブリフト制御用のSLD制御入力Rsld’が算出される。
That is, in the two-degree-of-
また、前述した加算要素114(制御入力算出手段)では、補償要素112で算出されたバルブリフト制御用の外乱補償値Rcyc_linと、2自由度SLDコントローラ113で算出されたバルブリフト制御用のSLD制御入力Rsld’の和として、バルブリフト制御用の参照入力Rsld_f’(制御入力)が算出される。
In addition, in the addition element 114 (control input calculation means) described above, the disturbance compensation value Rcyc_lin for valve lift control calculated by the
さらに、前述したDSMコントローラ115では、バルブリフト制御用の参照入力Rsld_f’に応じて、前述したDSMコントローラ105の制御アルゴリズム[式(11)〜(16)]と同様の制御アルゴリズムにより、リフト制御入力Uliftinが算出される。すなわち、このDSMコントローラ115では、前述した図21の式(11)〜(16)において、カム位相制御用の参照入力Rsld_fおよび位相制御入力Ucainをそれぞれ、バルブリフト制御用の参照入力Rsld_f’およびリフト制御入力Uliftinに置き換えるとともに、各種の関数および所定の設定値をそれぞれ、バルブリフト制御用の値に置き換えたアルゴリズムにより、リフト制御入力Uliftinが算出される。
Further, the
次に、前述した圧縮比コントローラ120について説明する。この圧縮比コントローラ120は、図25に示すように、目標圧縮比算出部121、補償要素122、2自由度SLDコントローラ123、加算要素124、およびDSMコントローラ125を備えている。
Next, the
この圧縮比コントローラ120では、以下に述べるように、圧縮比制御入力Ucrが算出されるとともに、この圧縮比制御入力Ucrが可変圧縮比機構80に入力されることにより、圧縮比Crが目標圧縮比Cr_cmdになるように制御される。
In the
まず、目標圧縮比算出部121(目標圧縮比設定手段)では、目標圧縮比Cr_cmd(圧縮比パラメータ)が、エンジン回転数NEおよびアクセル開度APに応じて、後述するマップ(図35参照)を検索することにより算出される。 First, in the target compression ratio calculation unit 121 (target compression ratio setting means), the target compression ratio Cr_cmd (compression ratio parameter) is a map (see FIG. 35) described later according to the engine speed NE and the accelerator pedal opening AP. Calculated by searching.
また、補償要素122(外乱補償値記憶手段、外乱補償値選択手段)では、以下に述べるように、圧縮比制御用の外乱補償値Rcyc_crが算出される。この圧縮比制御用の外乱補償値Rcyc_crは、エンジン3の運転中、燃焼圧に起因して発生する周期的外乱の影響を補償するためのものである。すなわち、そのような周期的外乱が可変圧縮比機構80に加えられると、圧縮比Crが変動し、それに伴って点火時期制御で設定された点火時期との間の適合性が低下してしまうことにより、ノッキングが発生したり、燃焼効率が低下したりするおそれがある。したがって、補償要素122では、そのような圧縮比の変化を回避するために、可変圧縮比機構80に加えられる周期的外乱の値を予測するとともに、その予測値の符号の正負を反転した値を、圧縮比制御用の外乱補償値Rcyc_crとして算出する。
The compensation element 122 (disturbance compensation value storage means, disturbance compensation value selection means) calculates a disturbance compensation value Rcyc_cr for compression ratio control as described below. This disturbance compensation value Rcyc_cr for controlling the compression ratio is for compensating for the influence of periodic disturbance caused by the combustion pressure during operation of the
具体的には、圧縮比制御用の外乱補償値Rcyc_crは、以下のように算出される。まず、圧縮比Crおよびクランク角カウンタの計数値C_crkに応じて、外乱補償値マップを検索することによりマップ値Rcyc_bs_cr(外乱補償値)を算出する。 Specifically, the disturbance compensation value Rcyc_cr for compression ratio control is calculated as follows. First, a map value Rcyc_bs_cr (disturbance compensation value) is calculated by searching a disturbance compensation value map in accordance with the compression ratio Cr and the count value C_crk of the crank angle counter.
この補償要素122では、外乱補償値マップとして、図26に実線で示すCr_cmd=Crmax用のマップ値Rcyc_bs_crと、同図に破線で示すCr_cmd=Crmin用のマップ値Rcyc_bs_crと、目標圧縮比Cr_cmdが最大値Crmaxと最小値Crminとの間にあるときの補間演算用の、複数段階のCr_cmdの値にそれぞれ対応して設定された複数のマップ値Rcyc_bs_cr(図示せず)とを備えたものを用いる。この外乱補償値マップは、ROM2c内に予め記憶されている。なお、本実施形態では、可変圧縮比機構80のジオメトリに起因して、上記の外乱補償値マップを用いるが、可変圧縮比機構のジオメトリによっては、外乱補償値マップにおける、Crmax用の値とCrmin用の値との関係が逆に設定される場合もある。
In this
また、圧縮比制御用の外乱補償値のマップ値Rcyc_bs_crは、上記のマップ値のうちの、そのときの目標圧縮比Cr_cmdに近い2つのマップ値を選択し、当該2つの選択値の補間演算により算出される。 As the map value Rcyc_bs_cr of the disturbance compensation value for compression ratio control, two map values close to the target compression ratio Cr_cmd at that time are selected from the above map values, and interpolation calculation of the two selected values is performed. Calculated.
次いで、以上のように算出したマップ値Rcyc_bs_crを、後述するように、カム位相Cain、バルブリフトLiftinおよびエンジン回転数NEに応じて補正することにより、圧縮比制御用の外乱補償値Rcyc_crが算出される。なお、後述するように、この圧縮比制御用の外乱補償値Rcyc_crの算出は、CRK信号の発生に同期するタイミングで実行される。 Next, the map value Rcyc_bs_cr calculated as described above is corrected according to the cam phase Cain, the valve lift Liftin, and the engine speed NE, as will be described later, thereby calculating a disturbance compensation value Rcyc_cr for compression ratio control. The As will be described later, the calculation of the disturbance compensation value Rcyc_cr for compression ratio control is executed at a timing synchronized with the generation of the CRK signal.
一方、2自由度SLDコントローラ123(制御入力算出手段)では、目標圧縮比Cr_cmdおよび圧縮比Crに応じて、前述した2自由度SLDコントローラ103の制御アルゴリズム[式(1)〜(8)]と同様の目標値フィルタ型2自由度スライディングモード制御アルゴリズムにより、圧縮比制御用のSLD制御入力Rsld''が算出される。
On the other hand, in the two-degree-of-freedom SLD controller 123 (control input calculation means), according to the target compression ratio Cr_cmd and the compression ratio Cr, the control algorithm [Equations (1) to (8)] of the two-degree-of-
すなわち、この2自由度SLDコントローラ123では、前述した図20の式(1)〜(8)において、カム位相Cain、目標カム位相Cain_cmdおよびカム位相制御用のSLD制御入力Rsldをそれぞれ、圧縮比Cr、目標圧縮比Cr_cmdおよび圧縮比制御用のSLD制御入力Rsld''に置き換えるとともに、各種の変数、パラメータおよび所定の設定値をそれぞれ、圧縮比制御用の値に置き換えたアルゴリズムにより、圧縮比制御用のSLD制御入力Rsld''が算出される。
That is, in the two-degree-of-
また、前述した加算要素124(制御入力算出手段)では、補償要素122で算出された圧縮比制御用の外乱補償値Rcyc_crと、2自由度SLDコントローラ123で算出された圧縮比制御用のSLD制御入力Rsld''の和として、圧縮比制御用の参照入力Rsld_f''(制御入力)が算出される。
Further, in the addition element 124 (control input calculation means) described above, the disturbance compensation value Rcyc_cr for compression ratio control calculated by the
さらに、前述したDSMコントローラ125では、圧縮比制御用の参照入力Rsld_f''に応じて、前述したDSMコントローラ105の制御アルゴリズム[式(11)〜(16)]と同様の制御アルゴリズムにより、圧縮比制御入力Ucrが算出される。すなわち、このDSMコントローラ125では、前述した図21の式(11)〜(16)において、カム位相制御用の参照入力Rsld_fおよび位相制御入力Ucainをそれぞれ、圧縮比制御用の参照入力Rsld_f''および圧縮比制御入力Ucrに置き換えるとともに、各種の関数および所定の設定値をそれぞれ、圧縮比制御用の値に置き換えたアルゴリズムにより、圧縮比制御入力Ucrが算出される。
Further, the
次に、ECU2により実行される各種の制御処理について説明する。まず、図27〜図31を参照しながら、3つの外乱補償値Rcyc_cin,Rcyc_lin,Rcyc_crを算出する処理について説明する。この処理は、前述した補償要素102,112,122に相当するものであり、IG・SW27がONに切り換えられた後の、クランクシャフト3dが所定のクランク角位置(例えば所定のシリンダ3aがTDC位置となるようなクランク角位置)に達した時点以降、CRK信号の発生に同期するタイミングで実行される。すなわち、本処理の実行周期は、CRK信号の発生周期に相当し、これは、前述したように、周期的外乱の発生周期がクランク角180゜分となるので、その1/18の値に相当する。
Next, various control processes executed by the
図27に示すように、この処理では、まず、ステップ1(図では「S1」と略す。以下同じ)において、演算フラグF_CALが「1」であるか否かを判別する。この演算フラグF_CALは、IG・SW27がオンされたときに「0」に設定される。そのため、今回のループが1回目であるときには、ステップ1の判別結果がNOとなり、その場合には、ステップ2に進み、演算フラグF_CALを「1」に設定する。これにより、次回以降のループにおいて、ステップ1の判別結果がYESとなる。
As shown in FIG. 27, in this process, first, in step 1 (abbreviated as “S1” in the figure, the same applies hereinafter), it is determined whether or not the calculation flag F_CAL is “1”. The calculation flag F_CAL is set to “0” when the IG •
次いで、ステップ3で、クランク角カウンタの計数値C_crkを値0に設定した後、後述するステップ6に進む。
Next, in
一方、ステップ1の判別結果がYESのときには、ステップ4に進み、クランク角カウンタの計数値C_crkを値10分、インクリメントする。次いで、ステップ5で、クランク角カウンタの計数値C_crkが値720であるか否かを判別する。この判別結果がNOのときには、後述するステップ6に進む。一方、この判別結果がYESのときには、前述したステップ3に進み、クランク角カウンタの計数値C_crkを値0に設定した後、ステップ6に進む。
On the other hand, if the determination result of
ステップ3またはステップ5に続くステップ6では、カム位相制御用の外乱補償値のマップ値Rcyc_bs_cinを算出する。具体的には、カム位相制御用の外乱補償値のマップ値Rcyc_bs_cinは、前述したように、目標カム位相Cain_cmd、クランク角カウンタの計数値C_crkおよびバルブリフトLiftinに応じて、前述したカム位相制御用の外乱補償値マップ(図18,19)を検索することにより、算出される。
In
次いで、ステップ7に進み、カム位相制御用の補正係数Krcyc_cinを、エンジン回転数NEに応じて、図28に示すテーブルを検索することにより算出する。同図に示すように、このテーブルでは、補正係数Krcyc_cinは、エンジン回転数NEが低いほど、より大きな値に設定されている。これは、低回転数域では、周期的外乱の周波数が低くなり、外力に対するカム位相制御系の応答ゲインが高くなるような周波数となるため、吸気カム6の周期的変位が大きくなるので、それを補償するためである。
Next, the routine proceeds to step 7, where the cam phase control correction coefficient Krcyc_cin is calculated by searching the table shown in FIG. 28 according to the engine speed NE. As shown in the figure, in this table, the correction coefficient Krcyc_cin is set to a larger value as the engine speed NE is lower. This is because the periodic disturbance frequency of the
また、このテーブルでは、補正係数Krcyc_cinは、所定回転数NEREF1(例えば4000rpm)以上の範囲では値に0に設定されている。これは、高回転域では、アクチュエータとしての電磁弁機構74の応答性が十分でないことで、周期的外乱の補償を正確に行うのが困難であることに加えて、周期的外乱が高周波になるのに対して、可変カム位相機構70は、その応答特性(ローパス特性)により、高周波の周期的外乱の影響を受けなくなることによる。
In this table, the correction coefficient Krcyc_cin is set to a value of 0 in a range equal to or higher than a predetermined rotation speed NEREF1 (for example, 4000 rpm). This is because, in the high rotation range, the response of the
ステップ7に続くステップ8では、カム位相制御用の外乱補償値Rcyc_cinを、上記ステップ6,7で算出したマップ値Rcyc_bs_cinおよび補正係数Krcyc_cinの積に設定し、RAM2b内に記憶する。
In
次に、ステップ9で、バルブリフト制御用の外乱補償値のマップ値Rcyc_bs_linを算出する。具体的には、バルブリフト制御用の外乱補償値のマップ値Rcyc_bs_linは、前述したように、目標バルブリフトLiftin_cmd、カム位相Cainおよびクランク角カウンタの計数値C_crkに応じて、前述したバルブリフト制御用の外乱補償値マップ(図23,24)を検索することにより、算出される。
Next, in
次いで、ステップ10に進み、バルブリフト制御用の補正係数Krcyc_linを、エンジン回転数NEに応じて、図29に示すテーブルを検索することにより算出する。同図に示すように、このテーブルでは、補正係数Krcyc_linは、エンジン回転数NEが低いほど、より大きな値に設定されている。これは、低回転数域では、前述したように、周期的外乱の周波数が低くなり、外力に対するバルブリフト制御系の応答ゲインが高くなるような周波数となるため、バルブリフトLiftinの周期的変位が大きくなるので、それを補償するためである。 Next, the routine proceeds to step 10, where the correction coefficient Krcyc_lin for valve lift control is calculated by searching the table shown in FIG. 29 according to the engine speed NE. As shown in the figure, in this table, the correction coefficient Krcyc_lin is set to a larger value as the engine speed NE is lower. This is because, as described above, the frequency of the periodic disturbance is low and the response gain of the valve lift control system to the external force is high in the low rotation speed range, so that the periodic displacement of the valve lift Liftin is reduced. This is to compensate for it.
また、このテーブルでは、補正係数Krcyc_linは、所定回転数NEREF2(例えば5000rpm)以上の範囲では、値0に設定されている。これは、高回転域では、リフトアクチュエータ60の応答性が十分でないことで、周期的外乱の補償を正確に行うのが困難であることに加えて、周期的外乱が高周波になるのに対して、可変バルブリフト機構50は、その応答特性(ローパス特性)により、高周波の周期的外乱の影響を受けなくなることによる。
Further, in this table, the correction coefficient Krcyc_lin is set to a value of 0 in a range equal to or higher than a predetermined rotation speed NEREF2 (for example, 5000 rpm). This is because the response of the
ステップ10に続くステップ11では、バルブリフト制御用の外乱補償値Rcyc_linを、上記ステップ9,10で算出したマップ値Rcyc_bs_linおよび補正係数Krcyc_linの積に設定する。
In
次いで、ステップ12に進み、圧縮比制御用の外乱補償値のマップ値Rcyc_bs_crを算出する。具体的には、このマップ値Rcyc_bs_crは、前述したように、クランク角カウンタの計数値C_crkおよび目標圧縮比Cr_cmdに応じて、前述した圧縮比制御用の外乱補償値マップ(図26)を検索することにより、算出される。 Next, the process proceeds to step 12, and a map value Rcyc_bs_cr of a disturbance compensation value for compression ratio control is calculated. Specifically, as described above, this map value Rcyc_bs_cr searches the above-described disturbance compensation value map for compression ratio control (FIG. 26) according to the count value C_crk of the crank angle counter and the target compression ratio Cr_cmd. Is calculated.
次に、ステップ13で、圧縮比制御用の第1補正係数Krcyc_cr1を、カム位相CainおよびバルブリフトLiftinに応じて、図30に示すマップを検索することにより、算出する。なお、図中に示すバルブリフトの所定値Liftin1〜3は、Liftin1>Liftin2>Liftin3の関係が成立するように設定されている。
Next, in
同図に示すように、このマップでは、第1補正係数Krcyc_cr1は、カム位相Cainが進角側の値であるほど、またはバルブリフトLiftinが小さいほど、より小さい値に設定されている。これは、カム位相Cainが進角側の値であるほど、内部EGR量の増大により混合気の燃焼温度が低くなり、燃焼圧が低くなることで、周期的外乱の振幅がより小さくなるためである。また、第1補正係数Krcyc_cr1は、バルブリフトLiftinが小さいほど、より小さい値に設定されている。これは、バルブリフトLiftinが小さい値であるほど、吸入空気量が小さくなり、燃焼圧が低くなることで、周期的外乱の振幅がより小さくなるためである。 As shown in the figure, in this map, the first correction coefficient Krcyc_cr1 is set to a smaller value as the cam phase Cain is an advanced value or as the valve lift Liftin is smaller. This is because the larger the cam phase Cain is, the lower the combustion temperature of the air-fuel mixture due to the increase in the amount of internal EGR, and the lower the combustion pressure, resulting in a smaller periodic disturbance amplitude. is there. The first correction coefficient Krcyc_cr1 is set to a smaller value as the valve lift Liftin is smaller. This is because the smaller the value of the valve lift Liftin, the smaller the intake air amount and the lower the combustion pressure, thereby reducing the amplitude of the periodic disturbance.
次いで、ステップ14で、圧縮比制御用の第2補正係数Krcyc_cr2を、エンジン回転数NEに応じて、図31に示すテーブルを検索することにより、算出する。同図に示すように、このテーブルでは、第2補正係数Krcyc_cr2は、エンジン回転数NEが所定回転数NEREF3(例えば3000rpm)より低い領域では、NE=NEREF4(<NEREF3)のときに最大値を示すように設定されている。これは、低回転数域では、慣性質量の影響により、周期的外乱の振幅がNE=NEREF4のときに最大値を示すので、それを補償するためである。
Next, in
また、このテーブルでは、第2補正係数Krcyc_cr2は、NE≧NEREF3の領域では、値0に設定されている。これは、高回転域では、圧縮比アクチュエータ87の応答性が十分でないことで、周期的外乱の補償を正確に行うのが困難であることに加えて、燃焼圧に起因する周期的外乱が高周波になるのに対して、可変圧縮比機構80は、その応答特性(ローパス特性)により、高周波の周期的外乱の影響を受けなくなることによる。
In this table, the second correction coefficient Krcyc_cr2 is set to a value of 0 in the region where NE ≧ NEREF3. This is because, in the high rotation range, the response of the
ステップ14に続くステップ15では、圧縮比制御用の外乱補償値Rcyc_crを、上記ステップ12〜14で算出したマップ値Rcyc_bs_linと、第1および第2補正係数Krcyc_cr1,Krcyc_cr2との積に設定し、その後、本処理を終了する。
In
次に、図32を参照しながら、前述した3つの制御入力Ucain,Uliftin,Ucrを算出する処理について説明する。この処理は、プログラムタイマの設定により、所定の制御周期ΔT(本実施形態では5msec)で実行される。 Next, a process for calculating the three control inputs Ucain, Uliftin, and Ucr described above will be described with reference to FIG. This process is executed at a predetermined control period ΔT (5 msec in this embodiment) by setting the program timer.
図32に示すように、この処理では、まず、ステップ20において、可変機構正常フラグF_VDOKが「1」であるか否かを判別する。この可変機構正常フラグF_VDOKは、可変カム位相機構70、可変バルブリフト機構50および可変圧縮比機構80がいずれも正常であるときには「1」に設定され、それ以外のときには「0」に設定される。
As shown in FIG. 32, in this process, first, in
ステップ20の判別結果がNOで、3つの可変機構50,70,80の少なくとも1つが故障しているときには、ステップ32に進み、位相制御入力Ucain、リフト制御入力Uliftinおよび圧縮比制御入力Ucrをいずれも値0に設定した後、本処理を終了する。なお、このように3つの制御入力がいずれも値0に設定されたときには、可変カム位相機構70により、カム位相Cainが最遅角値Cainrtに保持され、可変バルブリフト機構50により、バルブリフトLiftinがアイドル運転やエンジン始動に適した値に保持されるとともに、可変圧縮比機構80により、圧縮比Crが最小値Crminに保持される。
If the decision result in the
一方、ステップ20の判別結果がYESで、3つの可変機構50,70,80がいずれも正常であるときには、ステップ21に進み、エンジン始動フラグF_ENGSTが「1」であるか否かを判別する。このエンジン始動フラグF_ENGSTは、エンジン3の始動中は「1」に設定され、エンジン3が始動済みであるときには「0」に設定される。この判別結果がYESで、エンジン始動中であるときには、ステップ22に進み、目標カム位相Cain_cmdを所定の始動時用値Cain_cmd_stに設定する。
On the other hand, if the determination result of
次に、ステップ23,24において、目標バルブリフトLiftin_cmdおよび目標圧縮比Cr_cmdをそれぞれ、所定の始動時用値Liftin_cmd_st,Cr_cmd_stに設定する。
Next, in
次いで、ステップ25に進み、RAM2bに現在記憶されている3つの外乱補償値Rcyc_cin,Rcyc_lin,Rcyc_crの値を読み込む。すなわち、これらの値をサンプリングする。
Next, the process proceeds to step 25, and the three disturbance compensation values Rcyc_cin, Rcyc_lin, Rcyc_cr currently stored in the
ステップ25に続くステップ26では、位相制御入力Ucainを、算出された目標カム位相Cain_cmd、および読み込まれたカム位相制御用の外乱補償値Rcyc_cinを用い、前述した式(1)〜(8),(10)〜(16)の制御アルゴリズムにより算出する。
In
次に、ステップ27で、リフト制御入力Uliftinを算出する。このリフト制御入力Uliftinは、前述したように、上記位相制御入力Ucainと同様の制御アルゴリズムにより算出される。すなわち、算出された目標バルブリフトLiftin_cmd、および読み込まれたバルブリフト制御用の外乱補償値Rcyc_linを用い、式(1)〜(8),(10)〜(16)と同様の制御アルゴリズムにより、リフト制御入力Uliftinが算出される。
Next, in
次いで、ステップ28で、圧縮比制御入力Ucrを算出する。この圧縮比制御入力Ucrも、前述したように、上記位相制御入力Ucainと同様の制御アルゴリズムにより算出される。すなわち、算出された目標圧縮比Cr_cmd、および読み込まれた圧縮比制御用の外乱補償値Rcyc_crを用い、式(1)〜(8),(10)〜(16)と同様の制御アルゴリズムにより、圧縮比制御入力Ucrが算出される。その後、本処理を終了する。
Next, at
一方、ステップ21の判別結果がNOで、エンジン始動済みであるときには、ステップ29に進み、目標カム位相Cain_cmdを、エンジン回転数NEおよびアクセル開度APに応じて、図33に示すマップを検索することにより算出する。同図において、アクセル開度APの所定値AP1〜AP3は、AP1>AP2>AP3の関係が成立するように設定されており、この関係は以下の説明でも同様である。
On the other hand, if the decision result in the
このマップでは、目標カム位相Cain_cmdは、AP=AP1で、高負荷である場合には、エンジン回転数NEが高いほど、より遅角側の値に設定されている。また、AP=AP2で、中負荷である場合、目標カム位相Cain_cmdは、低回転域から中回転域では、エンジン回転数NEが高いほど、より進角側の値に設定されているとともに、中回転域から高回転域では、エンジン回転数NEが高いほど、より遅角側の値に設定されている。さらに、AP=AP3で、低負荷である場合も、目標カム位相Cain_cmdは、中負荷である場合とほぼ同様の傾向に設定されている。この理由については、後述する。 In this map, the target cam phase Cain_cmd is set to a more retarded value as the engine speed NE is higher when AP = AP1 and the load is high. When AP = AP2 and medium load, the target cam phase Cain_cmd is set to a more advanced value as the engine speed NE is higher from the low rotation range to the middle rotation range. From the rotational range to the high rotational range, the value is set to a more retarded value as the engine speed NE is higher. Further, even when AP = AP3 and the load is low, the target cam phase Cain_cmd is set to have the same tendency as that when the load is medium. The reason for this will be described later.
ステップ29に続くステップ30では、目標バルブリフトLiftin_cmdを、エンジン回転数NEおよびアクセル開度APに応じて、図34に示すマップを検索することにより算出する。このマップでは、目標バルブリフトLiftin_cmdは、AP=AP1で、高負荷である場合には、エンジン回転数NEが高いほど、より大きな値に設定されている。また、AP=AP2で、中負荷である場合、目標カム位相Cain_cmdは、低回転域では、エンジン回転数NEが高いほど、より大きな値に設定され、中回転域では、エンジン回転数NEに対して、ほとんど変わらない値に設定されているとともに、高回転域では、エンジン回転数NEが高いほど、より大きな値に設定されている。さらに、目標バルブリフトLiftin_cmdは、AP=AP3で、低負荷である場合も、中負荷である場合とほぼ同様の傾向に設定されている。
In
目標バルブリフトLiftin_cmdが以上のように設定され、かつ目標カム位相Cain_cmdが前述したように設定されている理由は、以下による。すなわち、低負荷域/低回転域では、バルブリフトLiftinを低リフトに制御し、かつカム位相Cainを進角側の値に制御することで、オットーサイクルよりも吸気弁4が早く閉じる早閉じのミラーサイクルを実現する。それにより、ポンピングロスを低減させるとともに、低リフト化による筒内流動を増大化させることで、燃焼の急速化を図り、燃焼効率を向上させるためである。
The reason why the target valve lift Liftin_cmd is set as described above and the target cam phase Cain_cmd is set as described above is as follows. That is, in the low load range / low rotation range, the valve lift Liftin is controlled to a low lift and the cam phase Cain is controlled to a value on the advance side so that the
また、中負荷域/中回転域では、バルブリフトLiftinを中程度のリフトに制御し、かつカム位相Cainを進角側の値に制御することで、バルブオーバーラップを増大させ、内部EGR量を増大させるとともに、早閉じのミラーサイクルの実現により、ポンピングロスの低減および燃費の向上を図るためである。 Further, in the middle load region / medium rotation region, the valve lift Liftin is controlled to a moderate lift and the cam phase Cain is controlled to a value on the advance side, thereby increasing the valve overlap and reducing the internal EGR amount. This is because the pumping loss is reduced and the fuel efficiency is improved by increasing the mirror cycle and increasing the speed of closing.
さらに、高負荷域/高回転域では、バルブリフトLiftinを高リフトに制御し、かつカム位相Cainを遅角側の値に制御することで、吸入空気量を増大させ、エンジントルクを増大させるためである。これに加えて、そのような制御の際、内部EGR量の減少と、圧縮行程の初期では、吸気の慣性力によって吸気挙動が継続するので、それを充填効率の向上に利用すべく、カム位相Cainを遅角側の値に制御するためである。 Further, in the high load range / high rotation range, the valve lift Liftin is controlled to be a high lift and the cam phase Cain is controlled to a value on the retard side to increase the intake air amount and increase the engine torque. It is. In addition, during such control, since the intake behavior continues due to the inertial force of the intake at the beginning of the compression stroke and the reduction of the internal EGR amount, the cam phase is used to improve the charging efficiency. This is because Cain is controlled to a value on the retard side.
ステップ30に続くステップ31では、目標圧縮比Cr_cmdを、エンジン回転数NEおよびアクセル開度APに応じて、図35に示すマップを検索することにより算出する。このマップでは、目標圧縮比Cr_cmdは、APが大きく、高負荷であるほど、または、エンジン回転数NEが高いほど、より小さな値に設定されている。これは、エンジン回転数NEおよびアクセル開度APが大きいほど(すなわち高負荷であるほど)、点火時期に対する最適な圧縮比Crの値がより小さくなることによる。すなわち、高回転/高負荷時に圧縮比Crを高圧縮比側の値に設定すると、ノッキングが発生するのを防止するために点火時期のリタード側への制御が必要となることで、発生トルク(効率)の低下を招くおそれがあるので、それを回避するためである。
In
次いで、前述したように、ステップ25〜28を実行し、3つの制御入力Ucain,Uliftin,Ucrを算出した後、本処理を終了する。 Next, as described above, steps 25 to 28 are executed to calculate three control inputs Ucain, Uliftin, Ucr, and then the present process is terminated.
以上のように、本実施形態の制御装置1では、3つの外乱補償値Rcyc_cin,Rcyc_lin,Rcyc_crが、予想される周期的外乱を補償するための、周期的外乱の正負を反転させた値として、CRK信号の発生に同期するタイミングで、マップ検索およびテーブル検索などにより算出される。さらに、そのように算出された外乱補償値Rcyc_cin,Rcyc_lin,Rcyc_crに応じて、3つの制御入力Ucain,Uliftin,Ucrがそれぞれ、前述した制御アルゴリズム[式(1)〜(8),(10)〜(16)]およびこれと同様の制御アルゴリズムにより算出される。
As described above, in the
したがって、そのように算出された制御入力Ucain,Uliftin,Ucrにより、カム位相Cain、バルブリフトLiftinおよび圧縮比Crをそれぞれフィードフォワード的に制御することで、周期的外乱がカム位相Cain、バルブリフトLiftinおよび圧縮比Crに及ぼす影響を、従来よりも迅速に補償し、抑制することができる。その結果、カム位相制御およびバルブリフト制御においては、周期的外乱に起因する、吸気弁4の開弁時の吸入空気量の変化を回避できることで、エンジン3の発生トルクの変動を回避できるとともに、安定した燃焼状態を確保できる。また、圧縮比制御においては、周期的外乱の影響による圧縮比Crの変化を回避でき、圧縮比Crと点火時期との間の適合性を良好な状態に維持できる。その結果、ノッキングの発生および燃焼効率の低下を回避することができる。
Therefore, by controlling the cam phase Cain, the valve lift Liftin, and the compression ratio Cr in a feed-forward manner using the control inputs Ucain, Uliftin, Ucr calculated as described above, the periodic disturbance is caused by the cam phase Cain, the valve lift Liftin. In addition, the influence on the compression ratio Cr can be compensated and suppressed more quickly than in the past. As a result, in the cam phase control and the valve lift control, it is possible to avoid changes in the intake air amount when the
また、制御入力Ucain,Uliftin,Ucrの算出において、目標値フィルタ型2自由度制御アルゴリズムが用いられるので、カム位相Cainを目標カム位相Cain_cmdに、バルブリフトLiftinを目標バルブリフトLiftin_cmdに、圧縮比Crを目標圧縮比Cr_cmdにそれぞれ迅速かつ安定した挙動で収束させることができる。例えば、カム位相Cainと目標カム位相Cain_cmdとの間に大きな偏差が生じた場合でも、そのような偏差に起因するオーバーシュートの発生を回避しながら、カム位相Cainを目標カム位相Cain_cmdに迅速かつ精度よく収束させることができる。 Further, in calculating the control inputs Ucain, Uliftin, Ucr, a target value filter type two-degree-of-freedom control algorithm is used. Therefore, the cam phase Cain is set to the target cam phase Cain_cmd, the valve lift Liftin is set to the target valve lift Liftin_cmd, and the compression ratio Cr is set. Can be converged to the target compression ratio Cr_cmd with quick and stable behavior. For example, even when a large deviation occurs between the cam phase Cain and the target cam phase Cain_cmd, the cam phase Cain is quickly and accurately set to the target cam phase Cain_cmd while avoiding the occurrence of overshoot due to such deviation. It can be well converged.
また、カム位相制御用の外乱補償値Rcyc_cinの算出では、そのマップ値Rcyc_bs_cinが、バルブリフトLiftinおよび目標カム位相Cain_cmdに応じて算出されるので、外乱補償値Rcyc_cinを、バルブリフトLiftinの変更に伴う周期的外乱の振幅変化および挙動変化の少なくとも一方と、カム位相Cainの変更に伴う周期的外乱の位相変化とをいずれも適切に補償できるような値として算出できる。さらに、補正係数Krcyc_cinが、図28のテーブルを用い、エンジン回転数NEに応じて算出され、この補正係数Krcyc_cinでマップ値Rcyc_bs_cinを補正することにより、外乱補償値Rcyc_cinが算出されるので、これにエンジン回転数NEの変化に伴う周期的外乱の周波数変化を適切に反映させることができる。 Further, in the calculation of the disturbance compensation value Rcyc_cin for cam phase control, the map value Rcyc_bs_cin is calculated according to the valve lift Liftin and the target cam phase Cain_cmd, so that the disturbance compensation value Rcyc_cin is changed with the change of the valve lift Liftin. At least one of the amplitude change and behavior change of the periodic disturbance and the phase change of the periodic disturbance accompanying the change of the cam phase Cain can be calculated as values that can be appropriately compensated. Further, the correction coefficient Krcyc_cin is calculated according to the engine speed NE using the table of FIG. 28, and the disturbance compensation value Rcyc_cin is calculated by correcting the map value Rcyc_bs_cin with this correction coefficient Krcyc_cin. The frequency change of the periodic disturbance accompanying the change of the engine speed NE can be appropriately reflected.
これに加えて、補正係数Krcyc_cinは、所定回転数NEREF1以上の範囲では値0に設定されるので、可変カム位相機構70の応答性が十分でない(すなわちアクチュエータとしての電磁弁機構74の応答性が低い)ことで、周期的外乱の補償を正確に行うのが困難な高回転域では、外乱補償値Rcyc_cinによる外乱補償が回避され、それにより、制御性の低下を回避できる。
In addition, since the correction coefficient Krcyc_cin is set to a value of 0 in a range equal to or greater than the predetermined rotational speed NEREF1, the responsiveness of the variable
さらに、バルブリフト制御用の外乱補償値Rcyc_linの算出では、そのマップ値Rcyc_bs_linが、目標バルブリフトLiftin_cmdおよびカム位相Cainに応じて算出されるので、外乱補償値Rcyc_linを、バルブリフトLiftinの変更に伴う周期的外乱の振幅変化および挙動変化の少なくとも一方と、カム位相Cainの変更に伴う周期的外乱の位相変化とをいずれも適切に補償できるような値として算出できる。また、補正係数Krcyc_linが、図29のテーブルを用い、エンジン回転数NEに応じて算出されるとともに、この補正係数Krcyc_linでマップ値Rcyc_bs_linを補正することにより、外乱補償値Rcyc_linが算出されるので、これにエンジン回転数NEの変化に伴う周期的外乱の周波数変化を適切に反映させることができる。 Further, in the calculation of the disturbance compensation value Rcyc_lin for valve lift control, the map value Rcyc_bs_lin is calculated according to the target valve lift Liftin_cmd and the cam phase Cain. Therefore, the disturbance compensation value Rcyc_lin is changed with the change of the valve lift Liftin. At least one of the amplitude change and behavior change of the periodic disturbance and the phase change of the periodic disturbance accompanying the change of the cam phase Cain can be calculated as values that can be appropriately compensated. Further, the correction coefficient Krcyc_lin is calculated according to the engine speed NE using the table of FIG. 29, and the disturbance compensation value Rcyc_lin is calculated by correcting the map value Rcyc_bs_lin with this correction coefficient Krcyc_lin. It is possible to appropriately reflect the frequency change of the periodic disturbance accompanying the change of the engine speed NE.
これに加えて、補正係数Krcyc_linは、所定回転数NEREF2以上の範囲では値0に設定されるので、可変バルブリフト機構50の応答性が十分でない(すなわちリフトアクチュエータ60の応答性が低い)ことで、周期的外乱の補償を正確に行うのが困難な高回転域では、外乱補償値Rcyc_linによる外乱補償が回避され、それにより、制御性の低下を回避できる。
In addition to this, the correction coefficient Krcyc_lin is set to a value of 0 in a range equal to or higher than the predetermined rotational speed NEREF2, so that the responsiveness of the variable
また、圧縮比制御用の外乱補償値Rcyc_crの算出では、そのマップ値Rcyc_bs_crが、目標圧縮比Cr_cmdに応じて算出されるので、外乱補償値Rcyc_crを、圧縮比Crの変更伴う周期的外乱の振幅変化を適切に補償できるような値として算出できる。さらに、第1補正係数Krcyc_cr1が、図30のマップを用い、カム位相CainおよびバルブリフトLiftinに応じて算出され、この第1補正係数Krcyc_cr1でマップ値Rcyc_bs_crを補正することにより、外乱補償値Rcyc_crが算出されるので、外乱補償値Rcyc_crを、バルブリフトLiftinおよびカム位相Cainの変更に伴う周期的外乱の振幅変化を適切に補償できるような値として算出できる。 In calculating the disturbance compensation value Rcyc_cr for compression ratio control, the map value Rcyc_bs_cr is calculated in accordance with the target compression ratio Cr_cmd. Therefore, the disturbance compensation value Rcyc_cr is changed to the amplitude of the periodic disturbance accompanying the change of the compression ratio Cr. It can be calculated as a value that can appropriately compensate for the change. Further, the first correction coefficient Krcyc_cr1 is calculated according to the cam phase Cain and the valve lift Liftin using the map of FIG. 30, and the disturbance compensation value Rcyc_cr is obtained by correcting the map value Rcyc_bs_cr with the first correction coefficient Krcyc_cr1. Since it is calculated, the disturbance compensation value Rcyc_cr can be calculated as a value that can appropriately compensate for the amplitude change of the periodic disturbance accompanying the change of the valve lift Liftin and the cam phase Cain.
これに加えて、第2補正係数Krcyc_cr2が、図31のテーブルを用い、エンジン回転数NEに応じて算出され、この第2補正係数Krcyc_cr2でマップ値Rcyc_bs_crを補正することにより、外乱補償値Rcyc_crが算出されるので、これにエンジン回転数NEの変化に伴う周期的外乱の周波数変化を適切に反映させることができる。また、第2補正係数Krcyc_cr2は、所定回転数NEREF3以上の範囲では値0に設定されるので、可変圧縮比機構80の応答性が十分でない(すなわち圧縮比アクチュエータ87の応答性が低い)ことで、周期的外乱の補償を正確に行うのが困難な高回転域では、外乱補償値Rcyc_crによる外乱補償が回避され、それにより、制御性の低下を回避できる。
In addition, the second correction coefficient Krcyc_cr2 is calculated according to the engine speed NE using the table of FIG. 31, and the disturbance compensation value Rcyc_cr is obtained by correcting the map value Rcyc_bs_cr with the second correction coefficient Krcyc_cr2. Since it is calculated, the frequency change of the periodic disturbance accompanying the change of the engine speed NE can be appropriately reflected on this. Further, since the second correction coefficient Krcyc_cr2 is set to a value of 0 in a range equal to or higher than the predetermined rotational speed NEREF3, the responsiveness of the variable
以上のように、カム位相制御、バルブリフト制御および圧縮比制御のいずれにおいても、制御の安定性および制御精度を格段に向上させることができる。 As described above, in any of the cam phase control, valve lift control, and compression ratio control, the control stability and control accuracy can be significantly improved.
図36は、以上のような制御手法により算出された位相制御入力Ucainを用い、目標カム位相Cain_cmdを一定値に保持しながら、カム位相Cainを制御した場合のシミュレーション結果を、1つのシリンダ3aのみにおけるものを例にとって示したものである。同図と前述した図13とを比較すると明らかなように、本実施形態の制御装置1によれば、前述したようなカム位相制御用の外乱補償値Rcyc_cinを用いることにより、周期的外乱の影響を効果的に抑制できることが判る。
FIG. 36 shows a simulation result when the cam phase Cain is controlled while the target cam phase Cain_cmd is held at a constant value using the phase control input Ucain calculated by the control method as described above, and only one cylinder 3a is shown. This is shown by way of example. As is clear from comparison between FIG. 13 and FIG. 13 described above, according to the
なお、第1実施形態は、3つの外乱補償値Rcyc_cin,Rcyc_lin,Rcyc_crの選択タイミングとしての算出タイミング(すなわち図27の処理の実行タイミング)を、CRK信号の発生タイミングに設定した例であるが、3つの外乱補償値の選択タイミングはこれに限らず、クランクシャフト3dが所定角度、回転するごとの、それに対応するタイミングに設定すればよい。例えば、CAM信号の発生に同期するタイミングに設定しても良い。その場合には、補償要素102,112,122において、外乱補償値Rcyc_cin,Rcyc_lin,Rcyc_crの算出に用いるマップを、クランク角カウンタの計数値C_crkに代えて、CAM信号の発生に同期して所定のカム角分、インクリメントされるカウンタの計数値に応じて設定したものを用いればよい。
The first embodiment is an example in which the calculation timing (that is, the execution timing of the process of FIG. 27) as the selection timing of the three disturbance compensation values Rcyc_cin, Rcyc_lin, and Rcyc_cr is set to the generation timing of the CRK signal. The selection timing of the three disturbance compensation values is not limited to this, and may be set to a timing corresponding to each rotation of the
また、補償要素102において、外乱補償値のマップ値Rcyc_bs_cinを、バルブリフトLiftinおよび目標カム位相Cain_cmdに代えて、バルブリフトパラメータとしての目標バルブリフトLiftin_cmd、およびカム位相パラメータとしてのカム位相Cainにそれぞれ応じて算出するようにしてもよい。さらに、補償要素112においても、外乱補償値のマップ値Rcyc_bs_linを、目標バルブリフトLiftin_cmdおよびカム位相Cainに代えて、バルブリフトパラメータとしてのバルブリフトLiftin、およびカム位相パラメータとしての目標カム位相Cain_cmdにそれぞれ応じて算出するようにしてもよい。
Further, in the
これと同様に、補償要素122において、外乱補償値のマップ値Rcyc_bs_crを、目標圧縮比Cr_cmdに代えて、圧縮比パラメータとしての圧縮比Crに応じて算出するようにしてもよく、第1補正係数Krcyc_cr1を、バルブリフトLiftinおよびカム位相Cainに代えて、バルブリフトパラメータとしての目標バルブリフトLiftin_cmd、およびカム位相パラメータとしての目標カム位相Cain_cmdにそれぞれ応じて算出するようにしてもよい。
Similarly, in the
また、第1実施形態は、カム位相制御用の外乱補償値のマップ値Rcyc_bs_cinの算出において、目標カム位相Cain_cmdに応じてクランク角カウンタの計数値C_crkを補正し、これとバルブリフトLiftinに応じて、1種類の外乱補償値マップ(図18,19)を検索する手法を用いた例であるが、マップ値Rcyc_bs_cinの算出で用いる外乱補償値マップとして、目標カム位相Cain_cmdの複数の値に応じてそれぞれ設定された複数種類のものを用いてもよい。例えば、Cain_cmd=Cainrt用のものと、Cain_cmd=Cainad用のものと、これらの間の複数段階の目標カム位相Cain_cmdの値用に設定された複数のものとを準備し、これらの外乱補償値マップのうちの、そのときの目標カム位相Cain_cmdに近い2つの外乱補償値マップを選択し、当該2つの選択マップにおけるマップ値の補間演算により、マップ値Rcyc_bs_cinを算出してもよい。これと同様に、外乱補償値Rcyc_linのマップ値Rcyc_bs_linの算出において、外乱補償値マップとして、目標バルブリフトLiftin_cmdの複数の値に応じてそれぞれ設定された複数種類のものを用いてもよい。 In the first embodiment, in calculating the disturbance compensation value map value Rcyc_bs_cin for cam phase control, the count value C_crk of the crank angle counter is corrected in accordance with the target cam phase Cain_cmd, and in response to the valve lift Liftin. In this example, a technique for searching for one type of disturbance compensation value map (FIGS. 18 and 19) is used. According to a plurality of values of the target cam phase Cain_cmd, the disturbance compensation value map used for calculating the map value Rcyc_bs_cin is used. A plurality of types set respectively may be used. For example, preparing for Cain_cmd = Cainrt, for Cain_cmd = Cainad, and a plurality of target cam phase Cain_cmd values between them are prepared, and these disturbance compensation value maps Among them, two disturbance compensation value maps close to the target cam phase Cain_cmd at that time may be selected, and the map value Rcyc_bs_cin may be calculated by interpolation calculation of the map values in the two selection maps. Similarly, in the calculation of the map value Rcyc_bs_lin of the disturbance compensation value Rcyc_lin, a plurality of types set respectively according to a plurality of values of the target valve lift Liftin_cmd may be used as the disturbance compensation value map.
さらに、第1実施形態は、カム位相制御用の参照入力Rsldを算出するための制御アルゴリズムとして目標値フィルタ型2自由度スライディングモード制御アルゴリズムを用いた例であるが、カム位相制御用の参照入力Rsldを算出するための制御アルゴリズムはこれに限らず、カム位相制御用の参照入力Rsldを、カム位相Cainを目標カム位相Cain_cmdに収束させるような値として算出できる制御アルゴリズムであればよい。例えば、PID制御アルゴリズムなどのフィードバック制御アルゴリズムを用いてもよく、バックステッピング制御アルゴリズムなどの応答指定型制御アルゴリズムを用いてもよい。これと同様に、バルブリフト制御用の参照入力Rsld’または圧縮比制御用の参照入力Rsld''を算出するための制御アルゴリズムとして、PI制御アルゴリズムおよびPID制御アルゴリズムなどのフィードバック制御アルゴリズムや、バックステッピング制御アルゴリズムなどの応答指定型制御アルゴリズムを用いてもよい。 Further, the first embodiment is an example using a target value filter type two-degree-of-freedom sliding mode control algorithm as a control algorithm for calculating a reference input Rsld for cam phase control. The control algorithm for calculating Rsld is not limited to this, and any control algorithm that can calculate the reference input Rsld for cam phase control as a value that causes the cam phase Cain to converge to the target cam phase Cain_cmd may be used. For example, a feedback control algorithm such as a PID control algorithm may be used, or a response designating control algorithm such as a backstepping control algorithm may be used. Similarly, as a control algorithm for calculating a reference input Rsld ′ for valve lift control or a reference input Rsld ″ for compression ratio control, a feedback control algorithm such as a PI control algorithm and a PID control algorithm, backstepping, etc. A response designating control algorithm such as a control algorithm may be used.
また、第1実施形態は、応答指定型制御アルゴリズムとして、目標値フィルタ型2自由度スライディングモード制御アルゴリズムを用いた例であるが、応答指定型制御アルゴリズムはこれに限らず、バックステッピング制御アルゴリズムなどの、目標値に対する制御対象の出力の収束速度および収束挙動を指定できるアルゴリズムであればよい。 The first embodiment is an example in which a target value filter type two-degree-of-freedom sliding mode control algorithm is used as a response designation type control algorithm. However, the response designation type control algorithm is not limited to this, and a backstepping control algorithm, etc. Any algorithm that can specify the convergence speed and convergence behavior of the output to be controlled with respect to the target value.
また、第1実施形態は、カム位相コントローラ100における位相制御入力Ucainの算出において、DSMコントローラ105を用いた例であるが、これを省略し、カム位相制御用の参照入力Rsld_fをそのまま位相制御入力Ucainとして可変カム位相機構70に入力するように構成してもよい。さらに、バルブリフトコントローラ110におけるリフト制御入力Uliftinの算出において、DSMコントローラ115を省略し、バルブリフト制御用の参照入力Rsld_f’をそのまま、リフト制御入力Uliftinとして、可変バルブリフト機構50に入力するように構成してもよい。これと同様に、圧縮比コントローラ120における圧縮比制御入力Ucrの算出においても、DSMコントローラ125を省略し、圧縮比制御用の参照入力Rsld_f''をそのまま、圧縮比制御入力Ucrとして、可変圧縮比機構80に入力するように構成してもよい。
The first embodiment is an example in which the
さらに、第1実施形態は、負荷パラメータとして、カム位相CainおよびバルブリフトLiftinを用いた例であるが、負荷パラメータはこれに限らず、エンジン3の負荷を表すものであればよい。例えば、負荷パラメータとして、目標カム位相Cain_cmdおよび目標バルブリフトLiftin_cmdをそれぞれ用いてもよく、吸気管内絶対圧PBA、TH通過吸入空気量GTHおよびアクセル開度APを用いてもよい。
Furthermore, although 1st Embodiment is an example which used cam phase Cain and valve lift Liftin as a load parameter, a load parameter should just represent the load of the
また、可変カム位相機構として、第1実施形態の油圧式の可変カム位相機構70に代えて、本出願人が特願2003−293009号において提案済みの電磁式の可変カム位相機構を用いてもよい。このようにした場合、電磁式の可変カム位相機構では、カム位相Cainがソレノイドの電磁力とばねの付勢力との釣り合いによって変更されるため、周期的外乱は進角側または遅角側のみに作用する。したがって、そのような周期的外乱を補償するために、カム位相制御用の外乱補償値Rcyc_cinを算出する場合、そのマップ値Rcyc_bs_cinは、図37に実線または破線で示すようなマップを用いて算出すればよい。
Further, as the variable cam phase mechanism, instead of the hydraulic variable
次に、本発明の第2実施形態に係る制御装置1Aについて説明する。本実施形態の制御装置1Aは、前述した第1実施形態の制御装置1と比べると、一部を除いて同様に構成されているので、以下、第1実施形態の制御装置1と異なる点を中心として説明する。図38〜図40に示すように、この制御装置1Aは、カム位相コントローラ200、バルブリフトコントローラ210および圧縮比コントローラ220を備えており、これらはいずれも、具体的にはECU2(外乱推定値算出手段)により構成されている。
Next, a
まず、カム位相コントローラ200について説明すると、このカム位相コントローラ200は、図38に示すように、目標カム位相算出部201(目標カム位相設定手段)、補償要素202(外乱補償値記憶手段、外乱補償値選択手段)、2自由度SLDコントローラ203(制御入力算出手段)、DSMコントローラ205および適応外乱オブザーバ206(外乱推定値算出手段)を備えている。このカム位相コントローラ200では、目標カム位相算出部201および補償要素202は、前述したカム位相コントローラ100のものと同様に構成されているので、それらの説明はここでは省略する。
First, the
また、適応外乱オブザーバ206は、モデル化誤差および外乱を補償するための、カム位相制御用の外乱推定値c1を算出するものである。具体的には、この適応外乱オブザーバ206では、カム位相Cain、カム位相制御用の外乱補償値Rcyc_cinおよびカム位相制御用のSLD制御入力Rsldに応じて、図41の式(17)〜(19)で表される、固定ゲイン法の同定アルゴリズムにより、カム位相制御用の外乱推定値c1が算出される。式(17)のCain_hatはカム位相の同定値を表し、式(18)のe_idは、同定誤差を表している。また、式(19)のP’は、同定ゲインを表している。
The
なお、以上の式(17)〜(19)は以下のように導出される。すなわち、前述した図20の式(9)のモデルにおいて、外乱を補償するために、カム位相制御用の外乱推定値c1および外乱補償値Rcyc_cinを付加すると、図41に示す式(20)が得られる。この式(20)において、右辺をカム位相の同定値Cain_hatに置き換え、そのように置き換えたモデルに基づき、カム位相の同定値Cain_hatとカム位相Cainとの偏差が最小になるように、統計処理に基づく固定ゲイン法の同定アルゴリズムを適用すると、前述した式(17)〜(19)が導出される。 The above formulas (17) to (19) are derived as follows. That is, when the estimated disturbance value c1 and disturbance compensation value Rcyc_cin for cam phase control are added to compensate for disturbance in the model of equation (9) in FIG. 20, the equation (20) shown in FIG. 41 is obtained. It is done. In this equation (20), the right side is replaced with the cam phase identification value Cain_hat, and statistical processing is performed so that the deviation between the cam phase identification value Cain_hat and the cam phase Cain is minimized based on the replaced model. When the identification algorithm of the fixed gain method based on the above is applied, the above-described equations (17) to (19) are derived.
以上の式(17)〜(19)のアルゴリズムにより、この適応外乱オブザーバ206では、カム位相制御用の外乱推定値c1が、モデル化誤差および外乱を適切に補償することができる値として算出される。
With the
また、2自由度SLDコントローラ203では、図42の式(21)〜(27)で表される目標値フィルタ型2自由度スライディングモード制御アルゴリズムにより、カム位相制御用のSLD制御入力Rsld(制御入力)が算出される。これらの式(21)〜(27)を参照すると明らかなように、この2自由度SLDコントローラ203の制御アルゴリズムは、等価制御入力Reqの算出式に、カム位相制御用の外乱補償値Rcyc_cinおよび外乱推定値c1を含んでいる点と、SLD制御入力Rsldの算出において適応則入力Radpを用いない点とが、前述した2自由度SLDコントローラ103のものと異なっている。
Further, the two-degree-of-
さらに、DSMコントローラ205では、上記のように算出されたカム位相制御用のSLD制御入力Rsldに基づいて、前述したDSMコントローラ105と同様の制御アルゴリズム[図43に示す式(28)〜(33)]により、位相制御入力Ucainが算出される。
Further, in the
カム位相コントローラ200は、以上のように構成されており、これと同様に、バルブリフトコントローラ210も構成されている。すなわち、図39に示すように、バルブリフトコントローラ210は、目標バルブリフト算出部211(目標バルブリフト設定手段)、補償要素212(外乱補償値記憶手段、外乱補償値選択手段)、2自由度SLDコントローラ213(制御入力算出手段)、DSMコントローラ215および適応外乱オブザーバ216(外乱推定値算出手段)を備えている。このバルブリフトコントローラ210では、目標バルブリフト算出部211および補償要素212は、前述したバルブリフトコントローラ110のものと同様に構成されているので、それらの説明はここでは省略する。
The
また、適応外乱オブザーバ216では、カム位相コントローラ200の適応外乱オブザーバ206と同様のアルゴリズムにより、バルブリフト制御用の外乱推定値c1’が算出される。すなわち、前述した図41の式(17)〜(19)において、CainをLiftinに、Cain_cmdをLiftin_cmdに、Rcyc_cinをRcyc_linに、c1をc1’に、RsldをRsld’にそれぞれ置き換えるとともに、各係数などをバルブリフト制御用の値に置き換えたアルゴリズムにより、バルブリフト制御用の外乱推定値c1’が算出される。
The
また、2自由度SLDコントローラ213では、カム位相コントローラ200の2自由度SLDコントローラ203と同様のアルゴリズムにより、バルブリフト制御用のSLD制御入力Rsld’が算出される。すなわち、前述した図42の式(21)〜(27)において、上述したように、各パラメータおよび各係数などをバルブリフト制御用の値に置き換えたアルゴリズムにより、バルブリフト制御用のSLD制御入力Rsld’(制御入力)が算出される。
Further, the two-degree-of-
さらに、DSMコントローラ215では、上記のように算出されたバルブリフト制御用のSLD制御入力Rsld’に基づいて、カム位相コントローラ200のDSMコントローラ205と同様の制御アルゴリズムにより、リフト制御入力Uliftinが算出される。すなわち、図43の式(28)〜(33)において、各パラメータおよび各係数などをバルブリフト制御用の値に置き換えたアルゴリズムにより、リフト制御入力Uliftinが算出される。
Further, the
一方、圧縮比コントローラ220も、カム位相コントローラ200と同様に構成されている。すなわち、図40に示すように、圧縮比コントローラ220は、目標圧縮比算出部221(目標圧縮比設定手段)、補償要素222(外乱補償値記憶手段、外乱補償値選択手段)、2自由度SLDコントローラ223(制御入力算出手段)、DSMコントローラ225および適応外乱オブザーバ226(外乱推定値算出手段)を備えている。この圧縮比コントローラ220では、目標圧縮比算出部221および補償要素222は、前述した圧縮比コントローラ120のものと同様に構成されているので、それらの説明はここでは省略する。
On the other hand, the
また、適応外乱オブザーバ226では、カム位相コントローラ200の適応外乱オブザーバ206と同様のアルゴリズムにより、圧縮比制御用の外乱推定値c1''が算出される。すなわち、前述した図41の式(17)〜(19)において、CainをCrに、Cain_cmdをCr_cmdに、Rcyc_cinをRcyc_crに、c1をc1''に、RsldをRsld''にそれぞれ置き換えるとともに、各係数などを圧縮比制御用の値に置き換えたアルゴリズムにより、圧縮比制御用の外乱推定値c1''が算出される。
The
また、2自由度SLDコントローラ223では、カム位相コントローラ200の2自由度SLDコントローラ203と同様のアルゴリズムにより、圧縮比制御用のSLD制御入力Rsld''(制御入力)が算出される。すなわち、前述した図42の式(21)〜(27)において、上述したように、各パラメータおよび各係数などを圧縮比制御用の値に置き換えたアルゴリズムにより、圧縮比制御用のSLD制御入力Rsld''が算出される。
Further, the two-degree-of-
さらに、DSMコントローラ225では、上記のように算出された圧縮比制御用のSLD制御入力Rsld''に基づいて、カム位相コントローラ200のDSMコントローラ205と同様の制御アルゴリズムにより、圧縮比制御入力Ucrが算出される。すなわち、図43の式(28)〜(33)において、各パラメータおよび各係数などを圧縮比制御用の値に置き換えたアルゴリズムにより、圧縮比制御入力Ucrが算出される。
Further, in the
この制御装置1Aでは、位相制御入力Ucain,Uliftin,UcrをECU2で算出する場合、前述した図32のステップ26において、式(21)〜(33)により、位相制御入力Ucainが算出される。また、ステップ27において、式(21)〜(33)の各変数および各係数などをバルブリフト制御用の値に置き換えたアルゴリズムにより、リフト制御入力Uliftinが算出されるとともに、ステップ28において、同じ手法により、圧縮比制御入力Ucrが算出される。
In this
以上のように構成された本実施形態の制御装置1Aによれば、第1実施形態の制御装置1と同様に、3つの外乱補償値Rcyc_cin,Rcyc_lin,Rcyc_crに応じて、3つの制御入力Ucain,Uliftin,Ucrがそれぞれ算出されるので、そのように算出された制御入力Ucain,Uliftin,Ucrにより、カム位相Cain、バルブリフトLiftinおよび圧縮比Crをそれぞれフィードフォワード的に制御することで、周期的外乱がカム位相Cain、バルブリフトLiftinおよび圧縮比Crに及ぼす影響を迅速に補償し、抑制することができる。その結果、カム位相制御、バルブリフト制御および圧縮比制御において、前述した制御装置1と同様の作用効果を得ることができる。
According to the
これに加えて、外乱推定値c1,c1’,c1''が、適応外乱オブザーバ206,216,226により、モデル化誤差および外乱を補償するような値として算出されるとともに、そのような外乱推定値c1,c1’,c1''に応じて、制御入力Ucain,Uliftin,Ucrが算出される。したがって、これらの制御入力Ucain,Uliftin,Ucrにより、カム位相Cain、バルブリフトLiftinおよび圧縮比Crを、定常偏差が生じないように制御することができるとともに、周期的外乱がカム位相Cain、バルブリフトLiftinおよび圧縮比Crに及ぼす影響を、第1実施形態の制御装置1よりも、迅速に補償し、抑制することができる。以上により、制御装置1と比べて、制御の安定性および制御精度をさらに向上させることができる。
In addition to this, the estimated disturbance values c1, c1 ′, c1 ″ are calculated by the
次に、本発明の第3実施形態に係る制御装置1Bについて説明する。本実施形態の制御装置1Bは、前述した第2実施形態の制御装置1Aと比べると、一部を除いて同様に構成されているので、以下、第2実施形態の制御装置1Aと異なる点を中心として説明する。図44〜図46に示すように、この制御装置1Bは、カム位相コントローラ300、バルブリフトコントローラ310および圧縮比コントローラ320を備えており、これらはいずれも、具体的にはECU2(モデルパラメータ同定手段)により構成されている。
Next, a
まず、カム位相コントローラ300について説明すると、このカム位相コントローラ300は、図44に示すように、目標カム位相算出部301(目標カム位相設定手段)、補償要素302(外乱補償値記憶手段、外乱補償値選択手段)、2自由度SLDコントローラ303(制御入力算出手段)、DSMコントローラ305および部分パラメータ同定器307(モデルパラメータ同定手段)を備えている。このカム位相コントローラ300は、前述したカム位相コントローラ200と比較して、前述した外乱オブザーバ206に代えて、部分パラメータ同定器307を備えている点と、それに伴って2自由度SLDコントローラ303の制御アルゴリズムの一部とが異なっている。
First, the
この部分パラメータ同定器307では、カム位相Cain、カム位相制御用の外乱補償値Rcyc_cinおよびカム位相制御用のSLD制御入力Rsldに応じて、図47の式(34)〜(39)で表される、固定ゲイン法の逐次型同定アルゴリズムにより、パラメータベクトルθが同定される。このパラメータベクトルθは、その転置行列が式(38)のように表されるベクトルであり、同式(38)のd1は、外乱補償値ゲインであり、可変カム位相機構70の経年変化および個体間のばらつきなどに起因して、周期的外乱の振幅が変化するのを補償するためのものである。また、式(34)のWは仮想出力を表し、式(35)のW_hatは、仮想出力の同定値を表している。さらに、式(37)のe_id’は、式(36)のように定義される同定誤差であり、P''は所定の同定ゲインを表しており、ζはその転置行列が式(39)のように表されるベクトルである。
The
なお、以上の式(34)〜(39)は以下のように導出される。すなわち、前述した図41の式(20)のモデルに、外乱補償値ゲインd1を付加すると、図47に示す式(40)が得られる。この式(40)において、各変数を離散時間1つ分シフトさせ、パラメータb1,b2、外乱補償値ゲインd1および外乱補償値Rcyc_cinを離散化し、Cainの項を左辺に移項させると、同図の式(41)が得られる。この式(41)において、左辺をWと定義し、右辺をW_hatと定義すると、上記式(34),(35)が得られる。ここで、Wは仮想的な制御対象の出力と考え、W_hatは、そのような制御対象の出力の同定値と考えることができるとともに、式(35)は、そのような仮想的な制御対象のモデルと考えることができる。したがって、仮想出力Wが仮想出力の同定値W_hatに近づくように、仮想的な制御対象のモデルパラメータの同定を行うべく、固定ゲイン法の逐次型同定アルゴリズムを適用すると、上記(34)〜(39)が導出される。 The above equations (34) to (39) are derived as follows. That is, when the disturbance compensation value gain d1 is added to the above-described model of the equation (20) in FIG. 41, the equation (40) shown in FIG. 47 is obtained. In this equation (40), each variable is shifted by one discrete time, the parameters b1, b2, the disturbance compensation value gain d1 and the disturbance compensation value Rcyc_cin are discretized, and the Cain term is moved to the left side. Equation (41) is obtained. In the equation (41), if the left side is defined as W and the right side is defined as W_hat, the above equations (34) and (35) are obtained. Here, W can be considered as an output of a virtual control target, W_hat can be considered as an identification value of the output of such a control target, and Equation (35) Think of it as a model. Therefore, when the sequential identification algorithm of the fixed gain method is applied so as to identify the model parameter of the virtual control target so that the virtual output W approaches the identification value W_hat of the virtual output, the above (34) to (39) ) Is derived.
以上の式(34)〜(39)の同定アルゴリズムにより、この部分パラメータ同定器307では、モデルパラメータb1,b2、外乱推定値c1および外乱補償値ゲインd1が、逐次同定される。
The
また、2自由度SLDコントローラ303では、図48の式(42)〜(48)で表される目標値フィルタ型2自由度スライディングモード制御アルゴリズムにより、カム位相制御用のSLD制御入力Rsldが算出される。これらの式(42)〜(48)を参照すると明らかなように、この2自由度SLDコントローラ303の制御アルゴリズムは、前述した2自由度SLDコントローラ203のものと比較すると、等価制御入力Reqの算出において、カム位相制御用の外乱補償値Rcyc_cinに、外乱補償値ゲインd1が乗算されている点のみが異なっている。
Further, in the two-degree-of-
さらに、DSMコントローラ305では、上記のように算出されたカム位相制御用のSLD制御入力Rsldに基づいて、前述したDSMコントローラ205と同じ制御アルゴリズム[図49に示す式(49)〜(54)]により、位相制御入力Ucainが算出される。
Further, in the
次に、バルブリフトコントローラ310に説明すると、このバルブリフトコントローラ310も、上記カム位相コントローラ300と同様に構成されている。具体的には、図45に示すように、バルブリフトコントローラ310は、目標バルブリフト算出部311(目標バルブリフト設定手段)、補償要素312(外乱補償値記憶手段、外乱補償値選択手段)、2自由度SLDコントローラ313(制御入力算出手段)、DSMコントローラ315および部分パラメータ同定器317(モデルパラメータ同定手段)を備えている。このバルブリフトコントローラ310は、前述したバルブリフトコントローラ210と比較して、前述した外乱オブザーバ216に代えて、部分パラメータ同定器317を備えている点と、それに伴って2自由度SLDコントローラ303の制御アルゴリズムの一部とが異なっている。
Next, the
この部分パラメータ同定器317では、バルブリフト制御用の、モデルパラメータb1’,b2’、外乱推定値c1’および外乱補償値ゲインd1’が、カム位相コントローラ300の部分パラメータ同定器307と同様のアルゴリズムにより、逐次同定される。すなわち、前述した図47の式(34)〜(39)において、b1,b2,c1,d1をb1’,b2’,c1’,d1’に、CainをLiftinに、Rcyc_cinをRcyc_linに、RsldをRsld’にそれぞれ置き換えるとともに、各係数などをバルブリフト制御用の値に置き換えたアルゴリズムにより、バルブリフト制御用の、モデルパラメータb1’,b2’、外乱推定値c1’および外乱補償値ゲインd1’がそれぞれ、逐次同定される。
In this
また、2自由度SLDコントローラ313では、カム位相コントローラ300の2自由度SLDコントローラ303と同様のアルゴリズムにより、バルブリフト制御用のSLD制御入力Rsld’が算出される。すなわち、前述した図48の式(42)〜(48)において、上述したように、各パラメータおよび各係数などをバルブリフト制御用の値に置き換えたアルゴリズムにより、バルブリフト制御用のSLD制御入力Rsld’が算出される。
Further, the two-degree-of-
さらに、DSMコントローラ315では、上記のように算出されたバルブリフト制御用のSLD制御入力Rsld’に基づいて、カム位相コントローラ300のDSMコントローラ305と同様の制御アルゴリズムにより、リフト制御入力Uliftinが算出される。すなわち、図49の式(49)〜(54)において、各パラメータおよび各係数などをバルブリフト制御用の値に置き換えたアルゴリズムにより、リフト制御入力Uliftinが算出される。
Further, the
一方、圧縮比コントローラ320も、カム位相コントローラ300と同様に構成されている。すなわち、図46に示すように、圧縮比コントローラ320は、目標圧縮比算出部321(目標圧縮比設定手段)、補償要素322(外乱補償値記憶手段、外乱補償値選択手段)、2自由度SLDコントローラ323(制御入力算出手段)、DSMコントローラ325および部分パラメータ同定器327(モデルパラメータ同定手段)を備えている。
On the other hand, the
この部分パラメータ同定器327では、圧縮比制御用の、モデルパラメータb1'',b2''、外乱推定値c1''および外乱補償値ゲインd1''が、カム位相コントローラ300の部分パラメータ同定器307と同様のアルゴリズムにより、逐次同定される。すなわち、前述した図47の式(34)〜(39)において、b1,b2,c1,d1をb1'',b2'',c1'',d1''に、CainをCrに、Rcyc_cinをRcyc_crに、RsldをRsld''にそれぞれ置き換えるとともに、各係数などを圧縮比制御用の値に置き換えたアルゴリズムにより、圧縮比制御用の、モデルパラメータb1'',b2''、外乱推定値c1''および外乱補償値ゲインd1''がそれぞれ、逐次同定される。
In this
また、2自由度SLDコントローラ313では、カム位相コントローラ300の2自由度SLDコントローラ303と同様のアルゴリズムにより、圧縮比制御用のSLD制御入力Rsld''が算出される。すなわち、前述した図48の式(42)〜(48)において、上述したように、各パラメータおよび各係数などを圧縮比制御用の値に置き換えたアルゴリズムにより、圧縮比制御用のSLD制御入力Rsld''が算出される。
Further, the two-degree-of-
さらに、DSMコントローラ325では、上記のように算出された圧縮比制御用のSLD制御入力Rsld''に基づいて、カム位相コントローラ300のDSMコントローラ305と同様の制御アルゴリズムにより、圧縮比制御入力Ucrが算出される。すなわち、図49の式(49)〜(54)において、各パラメータおよび各係数などを圧縮比制御用の値に置き換えたアルゴリズムにより、圧縮比制御入力Ucrが算出される。
Further, in the
以上のように構成された本実施形態の制御装置1Bによれば、第1および第2実施形態の制御装置1,1Aと同様に、3つの外乱補償値Rcyc_cin,Rcyc_lin,Rcyc_crに応じて、3つの制御入力Ucain,Uliftin,Ucrがそれぞれ算出されるので、そのように算出された制御入力Ucain,Uliftin,Ucrにより、カム位相Cain、バルブリフトLiftinおよび圧縮比Crをそれぞれフィードフォワード的に制御することで、周期的外乱がカム位相Cain、バルブリフトLiftinおよび圧縮比Crに及ぼす影響を迅速に補償し、抑制することができる。その結果、カム位相制御、バルブリフト制御および圧縮比制御において、前述した制御装置1と同様の作用効果を得ることができる。
According to the
これに加えて、制御装置1Bのカム位相コントローラ300では、モデルパラメータb1,b2、外乱推定値c1および外乱補償値ゲインd1が、逐次同定されるとともに、2自由度SLDコントローラ303により、そのように同定された値b1,b2,c1,d1およびカム位相制御用の外乱補償値Rcyc_cinに応じて、カム位相制御用のSLD制御入力Rsldが算出され、これに基づいて位相制御入力Ucainが算出される。したがって、この位相制御入力Ucainにより、可変カム位相機構70の経年変化および個体間のばらつきなどに起因して、周期的外乱の振幅が変化した場合でも、それを適切に補償しながら、カム位相Cainを目標カム位相Cain_cmdに迅速に精度よく収束させることができる。すなわち、周期的外乱がカム位相Cainに及ぼす影響を、第2実施形態のカム位相コントローラ200よりも、迅速に補償し、抑制することができる。以上により、第2実施形態のカム位相コントローラ200と比べて、カム位相制御の安定性および制御精度をさらに向上させることができる。
In addition, in the
これに加えて、バルブリフトコントローラ310および圧縮比コントローラ320でも、上記カム位相コントローラ300と同様の作用効果を得ることができ、それにより、第2実施形態のバルブリフトコントローラ210および圧縮比コントローラ220と比べて、バルブリフト制御および圧縮比制御の安定性および制御精度をさらに向上させることができる。
In addition, the
本実施形態のカム位相コントローラ300は、部分パラメータ同定器307により、モデルパラメータの一部(b1,b2)、外乱推定値c1および外乱補償値ゲインd1を同定するように構成した例であるが、部分パラメータ同定器307に代えて、全てのモデルパラメータa1,a2,b1,b2、外乱推定値c1および外乱補償値ゲインd1を同定するパラメータ同定器を用いてもよく、また、部分パラメータ同定器に代えて、外乱補償値ゲインd1のみを同定する同定器を用いてもよい。
The
さらに、部分パラメータ同定器307では、その同定アルゴリズムとして固定ゲイン法を用いたが、これに代えて他の同定アルゴリズムを用いてもよい。例えば、可変ゲイン法や、固定ゲイン法の改良アルゴリズムであるδ修正法またはσ修正法、モデルパラメータスケジューラとδ修正法を組み合わせた同定アルゴリズムを用いてもよい。これに加えて、コントローラ310,320においても、部分パラメータ同定器317,327を上記のように構成してもよいことは言うまでもない。
Furthermore, in the
なお、以上の各実施形態は、本発明の制御装置を、可動部駆動機構として可変カム位相機構70、可変バルブリフト機構50および可変圧縮比機構80の制御に適用した例であるが、本発明の制御装置はこれに限らず、周期的外乱が加えられる各種の産業機械の可動部駆動機構の制御に適用可能であることは言うまでもない。
Each of the above embodiments is an example in which the control device of the present invention is applied to the control of the variable
また、各実施形態は、可変カム位相機構70を、吸気カムシャフト5のクランクシャフト3dに対する位相Cainを変更するものとして構成した例であるが、可変カム位相機構はこれに限らず、排気カムシャフト8のクランクシャフト3dに対する位相を変更するものとして構成してもよく、さらに、吸気カムシャフト5および排気カムシャフト8の双方のクランクシャフト3dに対する位相を変更するものとして構成してもよい。このように可変カム位相機構を構成し、前述した制御アルゴリズムでこれを制御した場合、前述した作用効果に加えて、排気動弁系に作用する周期的外乱の影響を迅速に補償し、抑制することができる。その結果、周期的外乱の影響によって内部EGR量が減少するのを回避でき、安定した燃焼状態を確保できる。
Each embodiment is an example in which the variable
さらに、各実施形態は、可変バルブリフト機構50を、吸気弁4のリフトLiftinを変更するものとして構成した例であるが、可変バルブリフト機構はこれに限らず、排気弁7のリフトを変更するものとして構成してもよく、さらに、吸気弁4および排気弁7の双方のリフトを変更するものとして構成してもよい。このように可変バルブリフト機構を構成し、前述した制御アルゴリズムでこれを制御した場合、前述した作用効果に加えて、排気動弁系に作用する周期的外乱の影響を迅速に補償し、抑制することができる。その結果、周期的外乱の影響によって内部EGR量が変動するのを回避でき、安定した燃焼状態を確保できる。
Furthermore, although each embodiment is an example which comprised the variable
1,1A,1B 制御装置
2 ECU(外乱補償値記憶手段、外乱補償値選択手段、制御入力算出手段、
目標カム位相設定手段、外乱推定値算出手段、モデルパラメータ同定手段
、目標バルブリフト設定手段、目標圧縮比設定手段)
2c ROM(外乱補償値記憶手段)
3 内燃機関
3b ピストン(可動部)
3d クランクシャフト
4 吸気弁(可動部)
5 吸気カムシャフト(可動部)
7 排気弁
8 排気カムシャフト
50 可変バルブリフト機構(可動部駆動機構)
70 可変カム位相機構(可動部駆動機構)
80 可変圧縮比機構(可動部駆動機構)
101,201,301 目標カム位相算出部(目標カム位相設定手段)
111,211,311 目標バルブリフト算出部(目標バルブリフト設定手段)
121,221,321 目標圧縮比算出部(目標圧縮比設定手段)
102,112,122 補償要素(外乱補償値記憶手段、外乱補償値選択手段)
202,212,222 補償要素(外乱補償値記憶手段、外乱補償値選択手段)
302,312,322 補償要素(外乱補償値記憶手段、外乱補償値選択手段)
103,113,123 2自由度スライディングモードコントローラ(制御入力算出手段)
203,213,223 2自由度スライディングモードコントローラ(制御入力算出手段)
303,313,323 2自由度スライディングモードコントローラ(制御入力算出手段)
104,114,124 加算要素
206,216,226 適応外乱オブザーバ(外乱推定値算出手段)
307,317,327 部分パラメータ同定器(モデルパラメータ同定手段)
NE 内燃機関の回転数
NEREF1 所定回転数
NEREF2 所定回転数
NEREF3 所定回転数
Cain カム位相(可動部の動作タイミング、カム位相パラメータ、負荷パラメー
タ)
Cain_cmd 目標カム位相(カム位相パラメータ)
Rcyc_cin カム位相制御用の外乱補償値(補正した外乱補償値)
Rcyc_bs_cin カム位相制御用の外乱補償値のマップ値(外乱補償値)
Rsld カム位相制御用のSLD制御入力(制御入力)
Rsld_f カム位相制御用の参照入力(制御入力)
c1 カム位相制御用の外乱推定値
b1,b2 モデルパラメータ
Liftin バルブリフト(可動部の動作量、バルブリフトパラメータ、負荷パラメー
タ)
Liftin_cmd 目標バルブリフト(バルブリフトパラメータ)
Rcyc_lin バルブリフト制御用の外乱補償値(補正した外乱補償値)
Rcyc_bs_lin バルブリフト制御用の外乱補償値のマップ値(外乱補償値)
Rsld' バルブリフト制御用のSLD制御入力(制御入力)
Rsld_f' バルブリフト制御用の参照入力(制御入力)
c1' バルブリフト制御用の外乱推定値
b1',b2' モデルパラメータ
Cr 圧縮比
Cr_cmd 目標圧縮比(圧縮比パラメータ)
Rcyc_cr 圧縮比制御用の外乱補償値(補正した外乱補償値)
Rcyc_bs_cr 圧縮比制御用の外乱補償値のマップ値(外乱補償値)
Rsld'' 圧縮比制御用のSLD制御入力(制御入力)
Rsld_f'' 圧縮比制御用の参照入力(制御入力)
c1'' 圧縮比制御用の外乱推定値
b1'',b2'' モデルパラメータ
1,1A, 1B controller
2 ECU (disturbance compensation value storage means, disturbance compensation value selection means, control input calculation means,
Target cam phase setting means, disturbance estimated value calculation means, model parameter identification means
, Target valve lift setting means, target compression ratio setting means)
2c ROM (Disturbance compensation value storage means)
3 Internal combustion engine
3b Piston (moving part)
3d crankshaft
4 Intake valve (moving part)
5 Intake camshaft (moving part)
7 Exhaust valve
8 Exhaust camshaft
50 Variable valve lift mechanism (moving part drive mechanism)
70 Variable cam phase mechanism (moving part drive mechanism)
80 Variable compression ratio mechanism (moving part drive mechanism)
101,201,301 Target cam phase calculation unit (target cam phase setting means)
111,211,311 Target valve lift calculation unit (Target valve lift setting means)
121,221,321 Target compression ratio calculation unit (Target compression ratio setting means)
102,112,122 Compensation element (disturbance compensation value storage means, disturbance compensation value selection means)
202,212,222 Compensation element (disturbance compensation value storage means, disturbance compensation value selection means)
302,312,322 Compensation element (disturbance compensation value storage means, disturbance compensation value selection means)
103,113,123 2-DOF sliding mode controller (control input calculation means)
203,213,223 2-DOF sliding mode controller (control input calculation means)
303,313,323 2-DOF sliding mode controller (control input calculation means)
104,114,124 Addition element
206,216,226 Adaptive disturbance observer (disturbance estimated value calculation means)
307,317,327 Partial parameter identifier (model parameter identification means)
NE speed of internal combustion engine
NEREF1 Predetermined speed
NEREF2 Predetermined speed
NEREF3 Predetermined speed
Cain cam phase (moving part operation timing, cam phase parameter, load parameter
T)
Cain_cmd Target cam phase (cam phase parameter)
Rcyc_cin Disturbance compensation value for cam phase control (corrected disturbance compensation value)
Rcyc_bs_cin Map value of disturbance compensation value for cam phase control (disturbance compensation value)
Rsld SLD control input (control input) for cam phase control
Rsld_f Reference input for cam phase control (control input)
c1 Disturbance estimate for cam phase control
b1, b2 model parameters
Liftin valve lift (moving part movement, valve lift parameters, load parameters
T)
Liftin_cmd Target valve lift (valve lift parameter)
Rcyc_lin Disturbance compensation value for valve lift control (corrected disturbance compensation value)
Rcyc_bs_lin Map value of disturbance compensation value for valve lift control (disturbance compensation value)
Rsld 'SLD control input (control input) for valve lift control
Rsld_f 'Reference input for valve lift control (control input)
c1 'Disturbance estimate for valve lift control
b1 ', b2' model parameters
Cr compression ratio
Cr_cmd Target compression ratio (compression ratio parameter)
Rcyc_cr Disturbance compensation value for compression ratio control (corrected disturbance compensation value)
Rcyc_bs_cr Map value of disturbance compensation value for compression ratio control (disturbance compensation value)
Rsld '' SLD control input (control input) for compression ratio control
Rsld_f '' Reference input for compression ratio control (control input)
c1 '' Disturbance estimate for compression ratio control
b1 '', b2 '' model parameters
Claims (27)
前記周期的外乱を補償するための、前記クランクシャフトの回転に伴う前記周期的外乱の振幅変化の予測結果に応じて予め設定された複数の外乱補償値を記憶する外乱補償値記憶手段と、
前記内燃機関のクランクシャフトが所定角度、回転するごとに、それに対応する選択タイミングで、前記記憶されている複数の外乱補償値の中から当該選択タイミングに応じた外乱補償値を選択する外乱補償値選択手段と、
前記可動部駆動機構を制御するための制御入力を、前記選択された外乱補償値に応じて算出する制御入力算出手段と、
を備えることを特徴とする可動部駆動機構の制御装置。 With changing at least one of operation timing and operation amount of the movable portion of the internal combustion engine, the periodic disturbance has an amplitude that varies periodic manner with rotation of the crankshaft of the internal combustion engine of the movable portion driving mechanism applied A control device,
Disturbance compensation value storage means for storing a plurality of disturbance compensation values set in advance according to a prediction result of the amplitude change of the periodic disturbance accompanying rotation of the crankshaft for compensating the periodic disturbance;
Each time the crankshaft of the internal combustion engine rotates by a predetermined angle, a disturbance compensation value for selecting a disturbance compensation value corresponding to the selected timing from the stored disturbance compensation values at a corresponding selection timing A selection means;
A control input for controlling the movable portion drive mechanism, and a control input-calculating means for de San according to the selected disturbance compensation value,
A control device for a movable part drive mechanism.
前記複数の外乱補償値は、当該可変バルブリフト機構による前記バルブリフトの変更に伴う前記周期的外乱の前記振幅変化および挙動変化の少なくとも一方の予測結果にさらに応じて設定されており、
前記外乱補償値選択手段は、前記バルブリフトを表すバルブリフトパラメータにさらに応じて前記外乱補償値を選択することを特徴とする請求項2または3に記載の可動部駆動機構の制御装置。 The internal combustion engine includes a variable valve lift mechanism that changes a valve lift that is a lift of at least one of an intake valve and an exhaust valve of the internal combustion engine,
The plurality of disturbance compensation values are further set according to a prediction result of at least one of the amplitude change and behavior change of the periodic disturbance accompanying the change of the valve lift by the variable valve lift mechanism,
4. The control device for a movable part drive mechanism according to claim 2, wherein the disturbance compensation value selection unit selects the disturbance compensation value further according to a valve lift parameter representing the valve lift. 5.
前記制御入力算出手段は、前記カム位相が前記目標カム位相に収束するように、所定の応答指定型制御アルゴリズムを用いて、前記制御入力を算出することを特徴とする請求項2ないし6のいずれかに記載の可動部駆動機構の制御装置。 Further comprising target cam phase setting means for setting a target cam phase as a target of the cam phase;
7. The control input calculating unit according to claim 2 , wherein the control input calculating unit calculates the control input using a predetermined response designating control algorithm so that the cam phase converges to the target cam phase. A control device for a movable part drive mechanism according to claim 1.
前記制御入力算出手段は、前記制御入力を、前記算出された外乱推定値にさらに応じて算出することを特徴とする請求項2ないし6のいずれかに記載の可動部駆動機構の制御装置。 Disturbance for calculating disturbance estimation value for compensating disturbance and modeling error in the variable cam phase mechanism by a predetermined estimation algorithm based on a model that defines the relationship between the disturbance estimation value, the control input, and the cam phase. Further comprising an estimated value calculation means,
The control device for a movable part drive mechanism according to any one of claims 2 to 6, wherein the control input calculation means calculates the control input further according to the calculated disturbance estimated value.
前記制御入力算出手段は、前記制御入力を、前記同定されたモデルパラメータにさらに応じて算出することを特徴とする請求項2ないし6のいずれかに記載の可動部駆動機構の制御装置。 A model parameter identifying means for on-board identification of a model parameter of a model defining a relationship between the disturbance compensation value, the control input, and the cam phase;
The control device for a movable part drive mechanism according to claim 2, wherein the control input calculation unit calculates the control input further according to the identified model parameter.
前記外乱補償値選択手段は、前記カム位相を表すカム位相パラメータにさらに応じて前記外乱補償値を選択することを特徴とする請求項10または11に記載の可動部駆動機構の制御装置。 The internal combustion engine includes a variable cam phase mechanism that changes a cam phase that is a phase with respect to the crankshaft of at least one of an intake camshaft and an exhaust camshaft of the internal combustion engine,
The control device for a movable part drive mechanism according to claim 10 or 11, wherein the disturbance compensation value selection means selects the disturbance compensation value further according to a cam phase parameter representing the cam phase.
前記制御入力算出手段は、前記バルブリフトが前記目標バルブリフトに収束するように、所定の応答指定型制御アルゴリズムを用いて、前記制御入力を算出することを特徴とする請求項10ないし14のいずれかに記載の可動部駆動機構の制御装置。 A target valve lift setting means for setting a target valve lift that is a target of the valve lift;
15. The control input calculating unit according to claim 10 , wherein the control input calculating means calculates the control input using a predetermined response designating control algorithm so that the valve lift converges to the target valve lift. A control device for a movable part drive mechanism according to claim 1.
前記制御入力算出手段は、前記制御入力を、前記算出された外乱推定値にさらに応じて算出することを特徴とする請求項10ないし14のいずれかに記載の可動部駆動機構の制御装置。 Disturbance in which a disturbance estimated value for compensating disturbance and modeling error in the variable valve lift mechanism is calculated by a predetermined estimation algorithm based on a model that defines the relationship between the estimated disturbance value, the control input, and the valve lift. Further comprising an estimated value calculation means,
15. The control device for a movable part drive mechanism according to claim 10, wherein the control input calculation unit calculates the control input further according to the calculated disturbance estimated value.
前記制御入力算出手段は、前記制御入力を、前記同定されたモデルパラメータにさらに応じて算出することを特徴とする請求項10ないし14のいずれかに記載の可動部駆動機構の制御装置。 A model parameter identifying means for on-board identification of a model parameter of a model defining a relationship between the disturbance compensation value, the control input, and the valve lift;
The control device for a movable part drive mechanism according to claim 10, wherein the control input calculation unit calculates the control input further according to the identified model parameter.
前記負荷パラメータは、前記カム位相を表すカム位相パラメータを含むことを特徴とする請求項21に記載の可動部駆動機構の制御装置。 The internal combustion engine includes a variable cam phase mechanism that changes a cam phase that is a phase with respect to the crankshaft of at least one of an intake camshaft and an exhaust camshaft of the internal combustion engine,
The control device for a movable part driving mechanism according to claim 21, wherein the load parameter includes a cam phase parameter representing the cam phase.
前記負荷パラメータは、前記バルブリフトを表すバルブリフトパラメータを含むことを特徴とする請求項21または22に記載の可動部駆動機構の制御装置。 The internal combustion engine includes a variable valve lift mechanism that changes a valve lift that is a lift of at least one of an intake valve and an exhaust valve of the internal combustion engine,
The control device for a movable part drive mechanism according to claim 21 or 22, wherein the load parameter includes a valve lift parameter representing the valve lift.
前記制御入力算出手段は、前記圧縮比が前記目標圧縮比に収束するように、所定の応答指定型制御アルゴリズムを用いて、前記制御入力を算出することを特徴とする請求項18ないし24のいずれかに記載の可動部駆動機構の制御装置。 Further comprising target compression ratio setting means for setting a target compression ratio as a target of the compression ratio;
25. The control input calculating unit according to claim 18 , wherein the control input calculating unit calculates the control input using a predetermined response assignment control algorithm so that the compression ratio converges to the target compression ratio. A control device for a movable part drive mechanism according to claim 1.
前記制御入力算出手段は、前記制御入力を、前記算出された外乱推定値にさらに応じて算出することを特徴とする請求項18ないし24のいずれかに記載の可動部駆動機構の制御装置。 Disturbance in which a disturbance estimation value for compensating disturbance and modeling error in the variable compression ratio mechanism is calculated by a predetermined estimation algorithm based on a model that defines the relationship between the disturbance estimation value, the control input, and the compression ratio. Further comprising an estimated value calculation means,
The control device for a movable part drive mechanism according to any one of claims 18 to 24, wherein the control input calculation means further calculates the control input according to the calculated disturbance estimated value.
前記制御入力算出手段は、前記制御入力を、前記同定されたモデルパラメータにさらに応じて算出することを特徴とする請求項18ないし24のいずれかに記載の可動部駆動機構の制御装置。 A model parameter identifying means for on-board identification of a model parameter of a model defining a relationship between the disturbance compensation value, the control input, and the compression ratio;
25. The control device for a movable part drive mechanism according to claim 18, wherein the control input calculation unit calculates the control input further according to the identified model parameter.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004120533A JP4263134B2 (en) | 2004-04-15 | 2004-04-15 | Control device for movable part drive mechanism |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004120533A JP4263134B2 (en) | 2004-04-15 | 2004-04-15 | Control device for movable part drive mechanism |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005299596A JP2005299596A (en) | 2005-10-27 |
| JP4263134B2 true JP4263134B2 (en) | 2009-05-13 |
Family
ID=35331432
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004120533A Expired - Fee Related JP4263134B2 (en) | 2004-04-15 | 2004-04-15 | Control device for movable part drive mechanism |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4263134B2 (en) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5024030B2 (en) * | 2007-12-25 | 2012-09-12 | 日産自動車株式会社 | Control device of electric control device |
-
2004
- 2004-04-15 JP JP2004120533A patent/JP4263134B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005299596A (en) | 2005-10-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4326386B2 (en) | Control device | |
| CA2606408C (en) | Control apparatus and control method | |
| JP4082596B2 (en) | Control device | |
| JP4209435B2 (en) | Control device | |
| JP4188158B2 (en) | Control device for internal combustion engine | |
| EP1734239B1 (en) | Control apparatus for internal combustion engine | |
| JP4500595B2 (en) | Control device for internal combustion engine | |
| WO2005098554A1 (en) | Controller | |
| JP4351966B2 (en) | Control device | |
| JP4263149B2 (en) | Cam phase control device for internal combustion engine | |
| US7143728B1 (en) | Control apparatus | |
| JP4598474B2 (en) | Plant control equipment | |
| JP4486901B2 (en) | Control device | |
| JP4263134B2 (en) | Control device for movable part drive mechanism | |
| EP1645740B1 (en) | Intake airvolume controller of internal combustion engine | |
| JP4456830B2 (en) | Intake air amount control device for internal combustion engine |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20061128 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080924 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081117 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090113 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090210 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120220 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |