JP4110033B2 - Image forming apparatus - Google Patents
Image forming apparatus Download PDFInfo
- Publication number
- JP4110033B2 JP4110033B2 JP2003121812A JP2003121812A JP4110033B2 JP 4110033 B2 JP4110033 B2 JP 4110033B2 JP 2003121812 A JP2003121812 A JP 2003121812A JP 2003121812 A JP2003121812 A JP 2003121812A JP 4110033 B2 JP4110033 B2 JP 4110033B2
- Authority
- JP
- Japan
- Prior art keywords
- image forming
- image
- recording medium
- value
- forming apparatus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

















Landscapes
- Investigating Materials By The Use Of Optical Means Adapted For Particular Applications (AREA)
- Control Or Security For Electrophotography (AREA)
- Controlling Sheets Or Webs (AREA)
- Handling Of Sheets (AREA)
- Length Measuring Devices By Optical Means (AREA)
Description
【0001】
【発明の属する技術分野】
本発明は、レーザプリンタ,インクジェットプリンタ等の画像形成装置に関し、特にその記録媒体(用紙)等の種類,表面状態の判別に関するものである。
【0002】
【従来の技術】
従来、レーザビームプリンタやインクジェットプリンタなどの画像形成装置では、数多くのプリンタ用紙に対応して最適な画像を得るために複数の印刷モードを設けていた。その印刷モードは印刷時にユーザ自身が設定する構成になっていた。そのため、ユーザには紙の種類を判別するための知識が求められ、その紙の種類を自分で設定するわずらわしさがあった。さらにその設定を誤ると最適な画像を得られないといった問題があった。
【0003】
近年では、紙表面によって反射する正反射光と拡散反射光の量の違いを検出し、自動で用紙の種類を判別することにより、その検出結果に応じた画像形成制御を行い、最適な画像を得る事ができる画像形成装置も存在するようになった。図19に従来のプリンタ光沢度計の断面図を示す(下記特許文献1参照)。光沢検出器200はプリント基板220に通常どおり取り付けられたブロック210を有している。軸213上の光源チューブ212および軸215上の反射チューブ214が、ブロック210中に形成されている。光源216は光源チューブ212中に位置している。光センサ222は反射チューブ214中に位置している。このとき、光センサ222は主にスペクトル反射光に反応し、低光沢紙と高光沢紙を判別する。
【0004】
また、CCDエリアセンサで紙の表面画像を捉え、フラクタル次元を求めることにより、紙の粗度を求める手法が発明されている。図20に従来の平滑度検出器の基本動作を示した処理フロー図を示す(下記特許文献2参照)。記録媒体の表面に光を面積照射する(ステップ2−1、図ではS2−1と表記する、参照以下同様)。その後画像読取手段を含めた画像検出手段にて面積照射の反射光により形成される陰影像を平面画像として読み取り、その濃淡情報を多値画像データとして検出する(ステップ2−2)。つまり、照射した光は記録媒体の凹凸により反射光に陰影がつき、凹の部分は暗く、凸の部分は明るくなり、この陰影像を画像読み取り手段のCCDにより検出する。検出された多値画像データである濃淡情報を情報加工処理手段により画像処理を施すことで記録媒体の表面粗度を計測算出する(ステップ2−3)。その後、計測算出された表面粗度に対応した画像形成パラメータ値を画像形成制御手段により決定し制御する(ステップ2−4)。すなわち、この従来例ではCCDからの濃淡情報を読み取ることによって記録媒体の表面粗度を推察することができる。
【0005】
【特許文献1】
特開平11−216938号公報
【特許文献2】
特開平11−271037号公報
【0006】
【発明が解決しようとする課題】
しかし、エリアセンサやラインセンサなどの撮像センサを用いた場合、その演算量は多大なものになる。よって回路規模が大きくなり、演算時間が延びるとともに高価なものになってしまう。また、複雑な演算をする場合、多くのメモリを必要とし、スペースとコストが増大するといった問題がある。
【0007】
本発明は、このような状況のもとでなされたもので、記録媒体の種類等を判別する映像読取センサを搭載した画像形成装置において、映像読取センサの回路規模が小さく、メモリが少なくてすむようにすることを課題とするものである。
【0008】
【課題を解決するための手段】
前記課題を解決するため、本発明では、画像形成装置を次の(1)ないし(5)のとおりに構成する。
(1)記録媒体の表面を照射する発光素子から前記記憶媒体に照射され、該記録媒体で反射された反射光を受光する映像読取センサであって、記録媒体の表面の映像を読み取って光電変換する読取素子と、前記読取素子により読み取られた映像をデジタル値に変換するA/D変換回路と、前記A/D変換回路によって変換されたデジタル値を有する2次元の映像情報にもとづいて前記記録媒体の種類を判別するための該記録媒体の平滑特性に関するパラメータを演算する演算回路と、前記演算回路の演算結果を出力する出力部とがモノリシック半導体デバイスとして1チップ化された映像読取センサを搭載した画像形成装置において、
前記記録媒体に画像を形成する画像形成部と、
前記記録材の種類を判別する判別部と、
前記画像形成部の画像形成条件を設定する設定部と、を有し、
前記映像読取センサの前記演算回路は、前記2次元の映像情報の所定方向の1ライン毎にデジタル値の最大値と最小値と平均値とを演算し、かつ、該1ライン毎の演算結果を前記判定部に出力し、
前記判定部は、前記映像読取センサから出力された演算結果を用いて前記記録媒体の表面の凹凸量及び凹凸エッジ数とを求め、求めた該凹凸量及び該凹凸エッジ数にもとづいて前記記録媒体の種類を判別し、
前記設定部は、判別された前記記録媒体の種類に応じて画像形成条件を設定する画像形成装置。
(2)前記記録媒体からの反射光を集光するためのレンズが、前記記録媒体と前記読取素子の間に設けられている前記(1)に記載の画像形成装置。
(3)前記演算回路は、更に、前記デジタル値の最大値と最小値との差の値と、前記平均値を用いて1ライン毎にデジタル値を2値化して得られるエッジ数とを演算する演算部を有する前記(1)に記載の画像形成装置。
(4)前記出力部は、前記演算回路の演算結果を、前記A/D変換回路によりA/D変換された映像情報に付加して出力する前記(1)に記載の画像形成装置。
(5)前記演算回路は、前記所定方向とは直交する方向の1ライン毎に、デジタル値の最大値と最小値と平均値とを演算する前記(1)に記載の画像形成装置。
【0010】
【発明の実施の形態】
以下、本発明の実施の形態を、映像読取装置,画像形成装置の実施例により詳しく説明する。
【0011】
【実施例】
(実施例1)
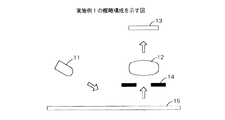
図1ないし図8を用いて、実施例1である“映像読取装置”について説明する。図1に映像読取装置の概略構成を示す。本映像読取装置は、光源11,レンズ12,CMOSエリアセンサ13,絞り14より構成される。なおCMOSエリアセンサ13はラインセンサでも良い。また絞り14はなくてもよい。
【0012】
光源11より記録媒体15へ光を照射し、そのときの記録媒体15の表面画像をレンズ12,絞り14を介してCMOSエリアセンサ13に結像させる。
【0013】
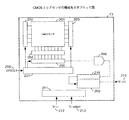
次に図2を用いてCMOSエリアセンサ13の回路構成について説明する。本CMOSエリアセンサ13は、CMOSプロセスにより、モノシリック半導体チップとして構成される。
【0014】
図中、201はCMOSセンサ部分であり、例えば64×64画素分のセンサがエリア状に配置される。202および203は垂直方向シフトレジスタ、204は出力バッファ、205は水平方向シフトレジスタ、206はシステムクロック、207はタイミングジェネレータである。208はA/Dコンバータ、219は記録媒体の種類を判別するための平滑特性に関する種々のパラメータを演算する演算部、209は出力インターフェース回路、210は、演算部219の演算結果や、演算前の映像情報等を出力するための出力端子および信号線である。
【0015】
次に動作について説明する。Sl_select信号213をアクディブとすると、CMOSセンサ部201は受光した光にもとづく電荷の蓄積を開始する。次に、システムクロック206を与えると、タイミングジェネレータ207によって、垂直方向シフトレジスタ202および203は読みだす画素の列を順次選択し、出力バッファ204にデータを順次セットする。
【0016】
出力バッファ204にセットされたデータは、水平方向シフトレジスタ205によって、A/Dコンバータ208ヘと転送される。A/Dコンバータ208でデジタル変換された画素データは、演算部219へ転送される。演算部219では,走査ラインごとに、最大値,最小値,平均値を演算する。演算された結果と画像データは出力インターフェース回路209によって所定のタイミングで制御され、Sl_select信号213がアクティブの期間、210のSl_out信号に出力される。
【0017】
一方、制御回路211によって、Sl_in信号212よりA/D変換ゲインが可変制御できる。例えば、撮像した画像のコントラストが得られない場合は、CPUはゲインを変更して、常に最良なコントラストで撮像することができる。また、演算部219の演算結果を、撮像した画像データに付加して出力するモードと、演算結果のみを出力するモードとを切り替えることができる。
【0018】
次に、CMOSエリアセンサ13から、記録媒体の種類,表面状態(表面粗度ともいえる)の判別を行う、例えば画像形成装置の制御部へのデータ転送方式について説明する。
【0019】
図3は1画素の転送タイミングを示している。各受光素子出力はSYSCLKの立下りタイミングで出力される。SD_RD信号立下りと共に、各画素8ビットがシリアルで送信される。このとき出力方式はシリアルである必要は無く、パラレルでも良い。
【0020】
図4は1ライン(64画素)転送タイミングを示している。1ラインごとの出力はまず、無効画素401から、送信される。続いて64個の有効画素402(1line分)出力され、64番目の画素の出力が終わると、続いて最大値403、最小値404、平均値405が出力される。
【0021】
図5は1ページ(64ライン)転送タイミングを示している。無効画素ライン501を出力した後、64ライン分の有効画素ライン502を出力する。
次に図6,図7を用いて演東部219内で行われる最大値,最小値,平均値の演算方法について説明する。
【0022】
図6は、8×8ピクセルのCMOSセンサ部201が読み取った記録材の表面画像をデジタル処理した画像である。
【0023】
デジタル処理は、CMOSセンサ部201から出力されるアナログ出力をA/D変換によって8ビットのピクセルデータに変換することによって行われる。
【0024】
40の記録材Aは、表面の紙の繊維が比較的がさついている、いわゆるラフ紙、41の記録材Bは、一般に使用される、いわゆる普通紙、43の記録材Cはグロス紙といわれ、紙の繊維の圧縮が十分になされている記録材の表面拡大画像である。この画像をCMOSセンサ部201で読み込みデジタル処理された画像が、43〜45となる。このように、記録材の種類によって、表面の画像は異なる。
【0025】
これは、主に紙の表面における繊維の状態が異なるために起こる現象である。つまり、紙の繊維の状態が立っていると、紙の表面に斜めに照射した光は繊維によって影ができ、また、繊椎の状態がねていると影はできない。このような現象が結果として43〜45の映像を作る。
【0026】
次に図7を用いて、記録材表面の凹凸量検出方法について説明する。図7において、50は記録材の表面の映像をデジタル処理した画像である。
【0027】
CMOSセンサ部201から出力されたアナログ出力が、A/D変換されて8ビットのピクセルデータに変換され、画像の明るさに比例して8ビットデータが決まる。そのとき、51は、8×8画素のうち最初の1ライン内における最も暗い部分であり、図の例では‘80’h、52は8×8画素のうち最初の1ライン内における最も明るい部分であり、図の例では‘10’hとなる。A/D変換後の値は、走査方向に順番に演算部219に送られる。
【0028】
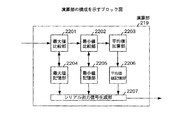
図8に演算部219のブロック図を示す。演算部219は最大値を記憶する最大値記憶部2204と最小値を記憶する最小値記憶部2205と平均値を記憶する平均値記憶部2206を持っており、各ラインの最初のデータはすべての領域に書き込まれる。続いて次のデータはそれぞれの比較部2201,2202,2203に送られる。
【0029】
例えば、まず最初に最大値比較部2201にデータが送られて最大値記憶部2204内のデータと比較を行い、最大値より大きい場合は、最大値を記憶する領域を書き換える。最大値比較部2201に送られたデータは、続いて最小値比較部2202に送られ、同様に、最小値より小さい場合は最小値を記培する領域を書き換える。その後平均値加算部2203にデータは送られ、平均値記憶部2206の値に加算する。例えば最初のラインの場合は、最大値記憶部2204には、51の‘80’hが書き込まれ、最小値記憶部2205には52の‘10’hが書き込まれる。1ラインが終了すると平均値記憶部2203には1ライン分の出力データの合計値が書き込まれているため、その値は1/8に割り算されて、平均値として、CMOSエリアセンサ外部に出力される。このとき、画素ごとに1/8に割り算を行って平均値記憶部2206に書き込んでもよい。
【0030】
その後演算結果はシリアル信号生成部2207によりシリアルデータに変繰され、チップ外部へ送信される。それにより、センサチップ外部の制御部では、送信された最大値と最小値の差を演算することにより表面の凹凸の大きさを計算し、記録材の種類を判別することができる。
【0031】
このように、センサチップ内部に最大値,最小値,平均値を演算する機構を設けることにより、CMOSエリアセンサ外部に大型のロジック回路を持つ必要がなくなる。よって、システム全体としてロジック回路を有していない場合でも、センサを使用することができるといったメリットがある。つまり、ロジック回路をセンサ内部に設け1チップ化することにより、小型化することができ、低コスト化を行う事ができる。
【0032】
また、演算結果のみを送るモードを選択した場合には、転送速度を早めることができる。
【0033】
画像形成装置の制御部では、表面の凹凸の大きさ,凹凸の幅にもとづいて、記録媒体の種類,表面状態を判別し、画像形成条件を制御することにより、記録媒体の種類,表面状態にかかわらず、良好な画像形成を行うことができる。
【0034】
以上説明したように、本実施例によれば、記録媒体の種類等を判別する映像読取装置において、回路規模が小さく、メモリが少なくてすむようにすることができる。さらに、CMOSエリアセンサ自体に最大値,最小値,平均値を演算する機構を設けているので、画像形成装置の制御部への通信量を減らすことができ、さらには制御部の演算回路を減らすことができる。その結果、制御部での演算量が減り、高速化,小型化,低コスト化を図ることができる。
【0035】
(実施例2)
図9、図10、図11を用いて、実施例2である“映像読取装置”について説明する。なお、基本的な構成は実施例1と同じであるので、実施例1と構成が同一の部分については実施例1の説明を援用し、実施例1と構成が異なる部分についてのみ説明する。
【0036】
図9の状態を正常状態とすると、図10は光量、もしくは蓄積時間が足りないために全体的に画像が暗くなっている場合を表している。このような場合、暗すぎる部分91は所定の下限値を下回ってしまっている。下限値を下回った値があるときは、アンダフロービットを立てる機構を設けることにより、その画像が暗すぎて、正確なコントラストの量が得ることができていないことを検出することができる。
【0037】
また、逆に図11は図9の正常状態に対して、光量、もしくは蓄積時間が多すぎたために全体的に画像が明るすぎる場合を表している。このような場合、明るすぎる部分101は所定の上限値を上回ってしまっている。上限値を上回った値があるときは、オーバフロービットを立てる機構を設けることにより、その画像が明るすぎて正確なコントラストを得ることができていないことを検出することができる。
【0038】
また、再撮影を行う際は、アンダフロービットが立っていれば、光量もしくは蓄積時間を増やせばよく、オーバフロービットが立っていた場合は光量もしくは蓄積時間を減らせばよいので、再撮影時に光量を落とすべきか上げるべきかの判断も行うことができる。
【0039】
図5は1ページ(64ライン)転送タイミングを示している。無効画素ラインを出力した後、64ライン分の有効画素ライン502を出力し、64番目のラインを出力した後に、オーバフロー,アンダフロービット領域503にて、オーバフロービット,アンダフロービットを出力する。
【0040】
以上説明したように、本実施例によれば、本映像読取装置からの信号から直ちに、撮影時の光量が適正か否か、再撮影時に光量を増,減すべきかを判定することができ、不図示の画像形成装置の制御部の構成を簡略化できる。
【0041】
(実施例3)
図12,図13を用いて、実施例3である“映像読取装置”について説明する。なお、基本的な構成は実施例1と同じであるので、実施例1と構成が同一の部分については実施例1の説明を援用し、実施例1と構成が異なる部分についてのみ説明する。
【0042】
図12は不良画素111のため1画素のみ出力がオーバフローして上限値を出力している場合を表している。光量を十分に落とした場合でも、オーバフローしている画素があった場合、不良画素があることを判断することができる。
【0043】
また図13は不良画素121により、1画素のみ出力がアンダフローして下限値を示している場合を示している。光量を十分に上げた場合でもアンダフローしている画素があった場合、不良画素があると判断する。
【0044】
以上説明したように、本実施例によれば、オーバフロービット,アンダフロービットをCMOSエリアセンサ内で、演算することにより、不良画素があるかどうかを少量の演算量で判断することができる。
【0045】
(実施例4)
図4を用いて、実施例4である“映像読取装置”について説明する。なお、基本的な構成は実施例1と同じであるので、実施例1と構成が同一の部分については実施例1の説明を援用し、実施例1と構成が異なる部分についてのみ説明する。
【0046】
実施例1における、センサの最大値と最小値、またはその差、と平均値を閾値として2値化した際のエッジ数を演算する演算手段をCMOSエリアセンサ13内に設け、図4における無効画素部401と、有効画素部402は送信せず、求められた演算データのみを制御部へ送信することにより、制御部への通信量を大幅に減らすことができる。
【0047】
よって、不図示の画像形成装置の制御部の高速化,小型化,低価格化を図ることができる。
【0048】
(実施例5)
図14,図15を用いて、実施例5である“映像読取装置”について説明する。なお、基本的な構成は実施例1と同じであるので、実施例1と構成が同一の部分については実施例1の説明を援用し、実施例1と構成が異なる部分についてのみ説明する。
【0049】
紙の繊維に方向性があった場合の表面画像は図14のようになる。図14において、繊維の方向と同じ方向に長い所定の領域132で最大値と最小値の差を見た場合と繊維の方向に垂直な方向に長い所定の領域131で最大値と最小値の差を見た場合では、繊維の方向に垂直な方向で見た場合の方が演算結果は大きくなる。また、図15における、2値化した場合のエッジ数は、繊維の方向と同じ方向に長い所定の領域142で演算した場合よりも、繊維の方向に垂直な方向に長い所定の領域141で演算した場合の方がエッジ数は大きくなる。演算する領域を縦方向と横方向の方向性を持たせ、平均化を行うことにより、繊維の向きが縦で測定した場合でも、横で測定した場合でも演算結果を平均化することができ、繊維の方向性の影響を受けない構成をとることができる。
【0050】
すなわち、本映像読取装置内に、最大値と最小値および平均値を演算する領域を任意に設定する設定手段を設け、領域を必要に応じて変更し、検出結果のばらつきを抑えることができる。そうすることにより、紙の繊維の方向が違う種類の紙を測定した場合でも、紙の平滑度を測定することができる。
【0051】
(実施例6)
図16は、実施例6である“画像形成装置”の概略構成を示す断面図である。なお、映像読取装置の基本的な構成は実施例1と同じであるので、実施例1の説明を援用し、実施例1と構成が異なる部分についてのみ説明する。
【0052】
図中1501は画像形成装置、1502は用紙カセット、1503は給紙ローラ、1504は転写ベルト駆動ローラ、1505は転写ベルト、1506〜1509はイエロ,マゼンタ,シアン,ブラックの感光ドラム、1510〜1513は転写ローラ、1514〜1517はイエロ,マゼンタ,シアン,ブラックのカートリッジ、1518〜1521はイエロ,マゼンタ,シアン,ブラックの光学ユニット、1522は定着ユニットである。
【0053】
本画像形成装置は、電子写真プロセスを用い記録紙上にイエロ,マゼンタ,シアン,ブラックの画像を重ねて転写し、定着ユニット1522によってトナー画像を温度制御に基づき熱定着させる。
【0054】
また、各色の光学ユニットは、各感光ドラムの表面をレーザビームによって露光走査して潜像を形成するよう構成され、これら一連の画像形成動作は搬送される記録紙上のあらかじめ決まった位置から画像が転写されるよう同期をとって走査制御している。
【0055】
さらに、本画像形成装置は、記録材であるところの記録紙を給紙,搬送する給紙モータと、転写ベルト駆動ローラを駆動する転写ベルト駆動モータと、各色感光ドラムおよび転写ローラを駆動する感光ドラム駆動モータと、定着ローラを駆動する定着駆動モータを備えている。
【0056】
1523は映像読取装置(実施例1ないし5参照)であり、給紙,搬送される記録紙の表面に光を照射させて、その反射光を集光し結像させて、記録材のある特定エリアの画像を検出する。
【0057】
本画像形成装置が備える制御CPU(図示せず)は、定着ユニット1522によって、所望の熱量を記録紙に与えることによって、記録紙上のトナー画像を融着し定着させる。
【0058】
次に、図17を用いて、制御CPUの動作について説明する。図17は、制御CPUが制御する各ユニットの構成を表した図である。
【0059】
図中、1610はCPU、13はCMOSエリアセンサ、1612〜1615はポリゴンミラー,モータ,レーザを備え、感光ドラム面上にレーザを走査し、所望の潜像を描くための光学ユニット、1616は記録材を搬送するための給紙モータ、1617は記録材を給紙するための給紙ローラの駆動開始に使用する給紙ソレノイド、1618記録材が所定位置にセットされているか否かを検知する紙有無センサ、1619は電子写真プロセスに必要な1次帯電,現像,1次転写,2次転写バイアスを制御する高圧電源、1620は感光ドラムおよび転写ローラを駆動するドラム駆動モータ、1621は転写ベルトおよび定着ユニットのローラを駆動するためのベルト駆動モータ、1622は定着ユニットおよび低圧電源ユニットであり、制御CPU1610によって図示しないサーミスタにより温度をモニタし、定着温度を一定に保つ制御がなされる。
【0060】
1623はASICであり、制御CPU1610の指示にもとづき、CMOSエリアセンサ13および光学ユニット1612〜1615内部のモータの速度制御、給紙モータ1616の速度制御を行う。
【0061】
モータの速度制御は、図示していないモータからのタック信号を検出して、タック信号の間隔が所定の時間となるようモータに対して加速または減速信号を出力して速度制御を行う。このため、制御回路はASIC1623のハードウエアによる回路で構成した方が、CPU1610の制御負荷低減が図れるメリットがある。
【0062】
制御CPU1610は、図示しないホストコンピュータからの指示によって、プリントコマンドを受けると、紙有無センサ1618によって記録材の有無を判断し、紙有りの場合は、給紙モータ1616,ドラム駆動モータ1620,ベルト駆動モータ1621を駆動するとともに、給紙ソレノイド1617を駆動し、記録材を所定位置まで搬送する。
【0063】
記録材がCMOSエリアセンサ13の位置まで搬送されると、制御CPU1610はASIC1623に対してCMOSエリアセンサ13の撮像指示を行い、CMOSエリアセンサ13は、記録材の表面画像を撮像する。
【0064】
このときASIC1623は、Sl_selectをアクティブとした後、所定のタイミング、所定パルスのSYSCLKを出力させて、CMOSセンサ部201からSl_outを経由して出力される撮像データを取り込む。
【0065】
一方、CMOSエリアセンサ13のゲイン設定は、あらかじめ制御CPU1610が取り決めた値をASIC1623内部のレジスタにセットすることによって、ASIC1623がSl_selectをアクティブとした後、所定のタイミング、所定パルスのSYSCLKを出力させて、CMOSエリアセンサ13に対し、Sl_inを経由してゲインを設定する。
【0066】
ASIC1623は、CMOSエリアセンサチップ13から1走査ライン毎に出力される、最大値,最小値を受け取り、例えば、図7の場合、1ラインの読み込みが終了した後に、2つの値の差、‘80’h―‘10’h=‘70’hを演算し、凹凸量演算結果値を蓄える領域に格納する。
【0067】
例えば、図7において、第1ラインにおけるコントラスト最大値と最小値の差は‘70’hになる。
【0068】
同様に、53は第2ラインの最も暗い部分の値でありであり‘80’h、54は第2ラインの最も明るい部分の値であり‘20’b、差は‘80’h−‘20’h=‘60’hとなり、この値(‘60’h)を、凹凸量演算結果を蓄える領域に加算する。
【0069】
55は第8ラインの最も暗い部分の値であり、‘80’h、56は第8ラインの最も明るい部分の値でありであり‘10’h、差は‘80’h―‘10’h=‘70’hとなる。
【0070】
このようにラインごとに最大値と最小値の差を全ライン分加算した値を、記録材表面の凹凸量演算結果値として定義する。
【0071】
次に図18を用いて、ASIC1632が記録材表面の凹凸エッジ量を検出する方法について説明する。
【0072】
50は記録材の表面をデジタル処理した画像である。60は、あらかじめCMOSセンサ部201の一つ前のサンプリングタイミングにより1ライン毎に出力される平均値の合計値を閾値として次のサンプリングタイミングによって撮像された8×8画索を2値化した結果を示した図である。このとき、ライン毎に一つ前ラインの平均値を読み込み、その値を闇値としても類似の画橡を得ることができる。
【0073】
61は、2値化の結果、第1ラインにおけるエッジの数であり、この例の場合‘05’hである。62は、第2ラインにおけるエッジの数であり、この例の場合‘03’hである。
【0074】
同様に、63は第8ラインにおけるエッジの数であり、この例の場合‘03’hとなる。
【0075】
これらラインごとにエッジの数をカウントして、全ライン分加算した値を、記録析表面の凹凸エッジ量演算結果値として定義する。
【0076】
このように、ASIC1623では記録材表面の凹凸量演算結果と、記録材表面の凹凸エッジ数の2つの値を内部のレジスタに書き込む。
【0077】
CPU1610は、前記ASIC1623内部のレジスタを読み込み、給紙された記録材の種類を判別し、その結果に応じて高圧電源1619の現像バイアス条件を可変制御する。
【0078】
例えば、記録材の表面繊維が粗い、いわゆるラフ紙の場合は、普通紙よりも現像バイアスを下げ、記録材の表面に付着するトナー量を抑えてトナーの飛び散りを防止する制御を行う。これは、特にラフ紙の場合、記録材の表面に付着するトナー量が多いために、紙繊維によるトナーが飛び散って画質が悪化する問題を解消するためである。
【0079】
また、CPU1610は、給紙された記録材の種類を判別し、その結果に応じて定着ユニット1622の温度条件を可変制御する。これは、特にOHTの場合、記録材の表面に付着するトナーの定着性が悪いとOHTの透過性が悪化するといった問題に対して効果がある。
【0080】
さらに、CPU1610は、給紙された記録材の種類を判別し、その結果に応じて記録材の搬送速度を可変制御する。搬送速度の可変制御は、速度制御を司るASIC1623の速度制御レジスタ値をCPU1610によって設定することによって実現する。これは、特にOHTあるいはグロス紙などの場合において、記録材の表面に付着するトナーの定着性を上げ、グロスを高めて画質の向上を図ることができる。
【0081】
このように本実施例では、CMOSエリアセンサによって撮像した記録材の表面画像から、ASICによるハード回路によって、実施例1で説明したように、最大値と最小値の差を算出し、また画像を2値化し、そのエッジの数を数え、その結果からCPUは、現像条件、定着ユニットの制御温度条件、記録材の搬送速度等を可変制御することにより画質の向上を図ることができる。
【0107】
【発明の効果】
以上説明したように、本発明によれば、記録媒体の種類,表面状態の判別に好適な、回路規模が小さく、メモリが少なくてすむ、映像読取装置を提供することができる。
【図面の簡単な説明】
【図1】 実施例1の概略構成を示す図
【図2】 CMOSエリアセンサの構成を示すブロック図
【図3】 1画素(8ビット)転送タイミングを示す図
【図4】 1ライン(64画素)転送タイミングを示す図
【図5】 1ページ(64ライン)転送タイミングを示す図
【図6】 実施例1の説明図
【図7】 実施例1の説明図
【図8】 演算部の構成を示すブロック図
【図9】 実施例2の説明図
【図10】 実施例2の説明図
【図11】 実施例2の説明図
【図12】 実施例3の説明図
【図13】 実施例3の説明図
【図14】 実施例5の説明図
【図15】 実施例5の説明図
【図16】 実施例6の概略構成を示す断面図
【図17】 CPUが制御する各ユニットを示す図
【図18】 実施例6の説明図
【図19】 特開平11−216938号公報のプリンタ光沢度計の断面図
【図20】 特開平11−271037号公報の平滑度検出器の基本動作を示すフローチャート
【符号の説明】
13 CMOSエリアセンサ
15 記録媒体
201 CMOSセンサ部
208 A/Dコンバータ
209 出力インターフェース回路
219 演算部[0001]
BACKGROUND OF THE INVENTION
The present invention relates to an image forming apparatus such as a laser printer or an ink jet printer.In placeIn particular,ThatThe present invention relates to the type of recording medium (paper) and the discrimination of the surface state.
[0002]
[Prior art]
Conventionally, in an image forming apparatus such as a laser beam printer or an ink jet printer, a plurality of print modes are provided in order to obtain an optimum image corresponding to a large number of printer papers. The print mode is configured to be set by the user himself at the time of printing. For this reason, the user is required to have knowledge for discriminating the type of paper, and has the trouble of setting the paper type by himself. Furthermore, there is a problem that an optimal image cannot be obtained if the setting is wrong.
[0003]
In recent years, the difference in the amount of specular reflection light and diffuse reflection light reflected by the paper surface is detected, and the paper type is automatically discriminated to perform image formation control according to the detection result, so that an optimal image can be obtained. There is also an image forming apparatus that can be obtained. FIG. 19 shows a sectional view of a conventional printer gloss meter (see
[0004]
Also, a method has been invented for obtaining the paper roughness by capturing the surface image of the paper with a CCD area sensor and obtaining the fractal dimension. FIG. 20 shows a processing flowchart showing the basic operation of a conventional smoothness detector (see
[0005]
[Patent Document 1]
JP-A-11-216938
[Patent Document 2]
Japanese Patent Laid-Open No. 11-271037
[0006]
[Problems to be solved by the invention]
However, when an imaging sensor such as an area sensor or a line sensor is used, the amount of calculation is enormous. Therefore, the circuit scale becomes large, the calculation time is prolonged, and the cost becomes expensive. In addition, when performing complex calculations, there is a problem that a large amount of memory is required, and space and cost increase.
[0007]
The present invention has been made under such circumstances, and determines the type of recording medium.Image formation with image reading sensorIn the deviceImage reading sensorIt is an object of the present invention to reduce the circuit scale and the amount of memory.
[0008]
[Means for Solving the Problems]
In order to solve the above-mentioned problem, in the present invention,Image formationNext (1) the equipmentOr (5)Configure as follows.
(1) An image reading sensor that receives reflected light that is irradiated onto the storage medium from a light emitting element that irradiates the surface of the recording medium and reflected by the recording medium, and reads the image on the surface of the recording medium to perform photoelectric conversion The recording element based on the two-dimensional video information having the digital value converted by the A / D conversion circuit, the A / D conversion circuit for converting the video read by the reading element into a digital value, and the A / D conversion circuit. Equipped with an image reading sensor in which an arithmetic circuit for calculating a parameter relating to the smoothing characteristic of the recording medium for discriminating the type of the medium and an output unit for outputting an arithmetic result of the arithmetic circuit are integrated into a single chip as a monolithic semiconductor device In the image forming apparatus,
An image forming unit for forming an image on the recording medium;
A discriminator for discriminating the type of the recording material;
A setting unit for setting image forming conditions of the image forming unit,
The arithmetic circuit of the video reading sensor calculates a maximum value, a minimum value, and an average value of digital values for each line in a predetermined direction of the two-dimensional video information, and calculates the calculation result for each line. Output to the determination unit,
The determination unit obtains the amount of unevenness and the number of uneven edges on the surface of the recording medium using the calculation result output from the video reading sensor, and the recording medium based on the obtained amount of unevenness and the number of uneven edges The type of
The setting unit is an image forming apparatus that sets image forming conditions according to the determined type of the recording medium.
(2) The image forming apparatus according to (1), wherein a lens for collecting reflected light from the recording medium is provided between the recording medium and the reading element.
(3) The arithmetic circuit further calculates a difference value between the maximum value and the minimum value of the digital value and the number of edges obtained by binarizing the digital value for each line using the average value. The image forming apparatus according to (1), further including an arithmetic unit that performs the operation.
(4) The image forming apparatus according to (1), wherein the output unit adds a calculation result of the calculation circuit to video information A / D-converted by the A / D conversion circuit and outputs the video information.
(5) The image forming apparatus according to (1), wherein the arithmetic circuit calculates a maximum value, a minimum value, and an average value of digital values for each line in a direction orthogonal to the predetermined direction.
[0010]
DETAILED DESCRIPTION OF THE INVENTION
Hereinafter, embodiments of the present invention will be described in detail with reference to examples of a video reading apparatus and an image forming apparatus.
[0011]
【Example】
Example 1
A “video reading apparatus” that is
[0012]
Light is emitted from the
[0013]
Next, the circuit configuration of the
[0014]
In the figure,
[0015]
Next, the operation will be described. When the
[0016]
The data set in the
[0017]
On the other hand, the A / D conversion gain can be variably controlled by the
[0018]
Next, a method of transferring data from the
[0019]
FIG. 3 shows the transfer timing of one pixel. Each light receiving element output is output at the falling timing of SYSCLK. Along with the falling edge of the SD_RD signal, 8 bits of each pixel are transmitted serially. At this time, the output method does not need to be serial and may be parallel.
[0020]
FIG. 4 shows the transfer timing of one line (64 pixels). The output for each line is first transmitted from the
[0021]
FIG. 5 shows the transfer timing of one page (64 lines). After the
Next, the calculation method of the maximum value, the minimum value, and the average value performed in the
[0022]
FIG. 6 is an image obtained by digitally processing the surface image of the recording material read by the 8 × 8 pixel
[0023]
Digital processing is performed by converting analog output output from the
[0024]
The recording material A of 40 is so-called rough paper in which the fibers of the paper on the surface are relatively sandwiched, the recording material B of 41 is commonly used, so-called plain paper, and the recording material C of 43 is called gloss paper. FIG. 3 is an enlarged image of the surface of a recording material in which paper fibers are sufficiently compressed. Images obtained by reading this image with the
[0025]
This is a phenomenon that occurs mainly because the fiber state on the paper surface is different. In other words, when the fiber state of the paper is standing, the light irradiated obliquely onto the paper surface can be shaded by the fiber, and when the fiber is in a state of shadow, it cannot be shaded. Such a phenomenon results in 43 to 45 images.
[0026]
Next, a method for detecting the unevenness on the surface of the recording material will be described with reference to FIG. In FIG. 7,
[0027]
The analog output output from the
[0028]
FIG. 8 shows a block diagram of the
[0029]
For example, first, data is sent to the maximum
[0030]
Thereafter, the calculation result is converted into serial data by the serial
[0031]
Thus, by providing a mechanism for calculating the maximum value, minimum value, and average value inside the sensor chip, it is not necessary to have a large logic circuit outside the CMOS area sensor. Therefore, there is an advantage that the sensor can be used even when the entire system does not have a logic circuit. That is, by providing the logic circuit inside the sensor and making it into one chip, it is possible to reduce the size and reduce the cost.
[0032]
Further, when the mode for sending only the calculation result is selected, the transfer speed can be increased.
[0033]
The control unit of the image forming apparatus determines the type and surface state of the recording medium by determining the type and surface state of the recording medium based on the size and width of the unevenness on the surface and controlling the image forming conditions. Regardless, good image formation can be performed.
[0034]
As described above, according to the present embodiment, in the video reading apparatus that determines the type of recording medium and the like, the circuit scale can be reduced and the memory can be reduced. Further, since the CMOS area sensor itself is provided with a mechanism for calculating the maximum value, the minimum value, and the average value, it is possible to reduce the amount of communication to the control unit of the image forming apparatus, and further reduce the calculation circuit of the control unit. be able to. As a result, the amount of calculation in the control unit is reduced, and the speed, size, and cost can be reduced.
[0035]
(Example 2)
A “video reading apparatus” according to the second embodiment will be described with reference to FIGS. 9, 10, and 11. Since the basic configuration is the same as that of the first embodiment, the description of the first embodiment is used for portions having the same configuration as the first embodiment, and only portions having a configuration different from that of the first embodiment will be described.
[0036]
If the state of FIG. 9 is a normal state, FIG. 10 shows a case where the image is dark as a whole because the amount of light or the accumulation time is insufficient. In such a case, the
[0037]
On the other hand, FIG. 11 shows a case where the image is too bright as a whole because the light amount or the accumulation time is too much compared to the normal state of FIG. In such a case, the too
[0038]
When re-shooting, if the underflow bit is set, the light amount or the accumulation time may be increased, and if the overflow bit is set, the light amount or the accumulation time may be decreased. You can also decide whether to drop or raise.
[0039]
FIG. 5 shows the transfer timing of one page (64 lines). After outputting the invalid pixel line, 64
[0040]
As described above, according to the present embodiment, it is possible to immediately determine from the signal from the video reading apparatus whether or not the light amount at the time of shooting is appropriate and whether the light amount should be increased or decreased at the time of re-shooting. The configuration of the control unit of the image forming apparatus (not shown) can be simplified.
[0041]
(Example 3)
A “video reading apparatus” that is
[0042]
FIG. 12 shows the case where the output overflows only one pixel and outputs the upper limit value due to the
[0043]
FIG. 13 shows a case where the output of only one pixel underflows due to the
[0044]
As described above, according to the present embodiment, it is possible to determine whether or not there is a defective pixel with a small amount of calculation by calculating the overflow bit and the underflow bit in the CMOS area sensor.
[0045]
Example 4
With reference to FIG. 4, a “video reading apparatus” that is
[0046]
In the first embodiment, the
[0047]
Therefore, it is possible to increase the speed, size, and cost of a control unit of an image forming apparatus (not shown).
[0048]
(Example 5)
A “video reading apparatus” that is
[0049]
FIG. 14 shows a surface image in the case where the paper fiber has directionality. In FIG. 14, the difference between the maximum value and the minimum value in the predetermined region 132 that is long in the same direction as the fiber direction and the difference between the maximum value and the minimum value in the
[0050]
That is, setting means for arbitrarily setting areas for calculating the maximum value, the minimum value, and the average value is provided in the image reading apparatus, and the area can be changed as necessary to suppress variations in detection results. By doing so, it is possible to measure the smoothness of the paper even when a paper of a different type is used.
[0051]
(Example 6)
FIG. 16 is a cross-sectional view illustrating a schematic configuration of an “image forming apparatus” according to the sixth embodiment. Since the basic configuration of the video reading apparatus is the same as that of the first embodiment, the description of the first embodiment is cited, and only the portions that are different from the first embodiment will be described.
[0052]
In the figure, 1501 is an image forming apparatus, 1502 is a paper cassette, 1503 is a paper feed roller, 1504 is a transfer belt drive roller, 1505 is a transfer belt, 1506 to 1509 are yellow, magenta, cyan and black photosensitive drums, and 1510 to 1513 are
[0053]
The image forming apparatus transfers an image of yellow, magenta, cyan, and black on a recording sheet by using an electrophotographic process, and heat-fixes the toner image by a
[0054]
Each color optical unit is configured to form a latent image by exposing and scanning the surface of each photosensitive drum with a laser beam, and a series of these image forming operations is performed from a predetermined position on the conveyed recording paper. Scan control is performed in synchronization with the transfer.
[0055]
Further, the image forming apparatus includes a paper feed motor that feeds and conveys recording paper as a recording material, a transfer belt drive motor that drives a transfer belt drive roller, and a photosensitive drum that drives each color photosensitive drum and transfer roller. A drum driving motor and a fixing driving motor for driving the fixing roller are provided.
[0056]
Reference numeral 1523 denotes an image reading apparatus (see Examples 1 to 5), which irradiates light onto the surface of the recording paper to be fed and conveyed, condenses the reflected light to form an image, and identifies the recording material. Detect area image.
[0057]
A control CPU (not shown) provided in the image forming apparatus fuses and fixes the toner image on the recording paper by applying a desired amount of heat to the recording paper by the
[0058]
Next, the operation of the control CPU will be described with reference to FIG. FIG. 17 is a diagram illustrating the configuration of each unit controlled by the control CPU.
[0059]
In the figure, 1610 is a CPU, 13 is a CMOS area sensor, 1612 to 1615 are provided with polygon mirrors, motors, and lasers, an optical unit for scanning the surface of the photosensitive drum to draw a desired latent image, and 1616 is a recording unit. A paper feed motor for conveying the material, 1617 is a paper feed solenoid used to start driving the paper feed roller for feeding the recording material, and a paper for detecting whether or not the 1618 recording material is set at a predetermined position.
[0060]
[0061]
The speed control of the motor is performed by detecting a tack signal from a motor (not shown) and outputting an acceleration or deceleration signal to the motor so that the interval between the tack signals becomes a predetermined time. For this reason, if the control circuit is configured by a hardware circuit of the
[0062]
When receiving a print command in response to an instruction from a host computer (not shown), the
[0063]
When the recording material is conveyed to the position of the
[0064]
At this time, the
[0065]
On the other hand, the gain setting of the
[0066]
The
[0067]
For example, in FIG. 7, the difference between the maximum contrast value and the minimum contrast value in the first line is' 70'h.
[0068]
Similarly, 53 is the value of the darkest part of the second line, '80'h, 54 is the value of the brightest part of the second line,' 20'b, and the difference is' 80'h-'20. 'h =' 60'h is obtained, and this value ('60'h) is added to the region for storing the unevenness calculation result.
[0069]
55 is the value of the darkest part of the eighth line, '80'h, 56 is the value of the brightest part of the eighth line,' 10'h, and the difference is' 80'h-'10'h = '70'h.
[0070]
In this way, a value obtained by adding the difference between the maximum value and the minimum value for all lines for each line is defined as the unevenness calculation result value on the surface of the recording material.
[0071]
Next, a method in which the ASIC 1632 detects the uneven edge amount on the surface of the recording material will be described with reference to FIG.
[0072]
[0073]
61 is the number of edges in the first line as a result of binarization, and in this example is' 05'h. 62 is the number of edges in the second line, which is' 03'h in this example.
[0074]
Similarly, 63 is the number of edges in the eighth line, which is' 03'h in this example.
[0075]
A value obtained by counting the number of edges for each line and adding all the lines is defined as a calculation result value of the uneven edge amount on the recording surface.
[0076]
As described above, the
[0077]
The
[0078]
For example, in the case of so-called rough paper where the surface fibers of the recording material are rough, control is performed to prevent toner scattering by lowering the developing bias than plain paper and suppressing the amount of toner adhering to the surface of the recording material. This is because the amount of toner adhering to the surface of the recording material is large especially in the case of rough paper, so that the problem that the image quality deteriorates due to the scattering of the toner due to the paper fibers is solved.
[0079]
Further, the
[0080]
Further, the
[0081]
As described above, in this embodiment, the difference between the maximum value and the minimum value is calculated from the surface image of the recording material imaged by the CMOS area sensor by the ASIC hardware circuit as described in
[0107]
【The invention's effect】
As described above, according to the present invention, it is possible to provide an image reading apparatus that is suitable for determining the type and surface state of a recording medium and has a small circuit scale and a small memory.
[Brief description of the drawings]
FIG. 1 is a diagram showing a schematic configuration of a first embodiment.
FIG. 2 is a block diagram showing the configuration of a CMOS area sensor
FIG. 3 is a diagram showing transfer timing of one pixel (8 bits)
FIG. 4 is a diagram showing transfer timing of one line (64 pixels)
FIG. 5 is a diagram showing transfer timing of one page (64 lines)
FIG. 6 is an explanatory diagram of the first embodiment.
7 is an explanatory diagram of Example 1. FIG.
FIG. 8 is a block diagram showing a configuration of a calculation unit
FIG. 9 is an explanatory diagram of the second embodiment.
FIG. 10 is an explanatory diagram of the second embodiment.
FIG. 11 is an explanatory diagram of the second embodiment.
FIG. 12 is an explanatory diagram of Example 3
FIG. 13 is an explanatory diagram of the third embodiment.
FIG. 14 is an explanatory diagram of the fifth embodiment.
FIG. 15 is an explanatory diagram of the fifth embodiment.
FIG. 16 is a sectional view showing a schematic configuration of Example 6;
FIG. 17 is a diagram showing each unit controlled by a CPU.
18 is an explanatory diagram of Example 6. FIG.
FIG. 19 is a sectional view of a printer gloss meter disclosed in Japanese Patent Application Laid-Open No. 11-216938.
FIG. 20 is a flowchart showing the basic operation of the smoothness detector disclosed in Japanese Patent Laid-Open No. 11-271037.
[Explanation of symbols]
13 CMOS area sensor
15 Recording media
201 CMOS sensor
208 A / D converter
209 Output interface circuit
219 Calculation unit
Claims (5)
前記記録媒体に画像を形成する画像形成部と、
前記記録材の種類を判別する判別部と、
前記画像形成部の画像形成条件を設定する設定部と、を有し、
前記映像読取センサの前記演算回路は、前記2次元の映像情報の所定方向の1ライン毎にデジタル値の最大値と最小値と平均値とを演算し、かつ、該1ライン毎の演算結果を前記判定部に出力し、
前記判定部は、前記映像読取センサから出力された演算結果を用いて前記記録媒体の表面の凹凸量及び凹凸エッジ数とを求め、求めた該凹凸量及び該凹凸エッジ数にもとづいて前記記録媒体の種類を判別し、
前記設定部は、判別された前記記録媒体の種類に応じて画像形成条件を設定することを特徴とする画像形成装置。 Emitted from the light emitting element for irradiating the surface of the recording medium to the storage medium, a video reading sensor for receiving the reflected light reflected by said recording medium, reading photoelectrically converted by reading the image of the surface of the record medium element and the a / D conversion circuit for converting a digital value movies image read by the reading device, said recording medium based on the two-dimensional image information having a digital value converted by the a / D converter circuit types and arithmetic circuit for calculating a parameter related to the smooth characteristics of the recording medium to determine the video reading sensor and an output unit is a single chip as monolithic semiconductors device for outputting an operation result of the arithmetic circuit In the installed image forming apparatus,
An image forming unit for forming an image on the recording medium;
A discriminator for discriminating the type of the recording material;
A setting unit for setting image forming conditions of the image forming unit,
The arithmetic circuit of the video reading sensor calculates a maximum value, a minimum value, and an average value of digital values for each line in a predetermined direction of the two-dimensional video information, and calculates the calculation result for each line. Output to the determination unit,
The determination unit obtains the amount of unevenness and the number of uneven edges on the surface of the recording medium using the calculation result output from the video reading sensor, and the recording medium based on the obtained amount of unevenness and the number of uneven edges The type of
The image forming apparatus , wherein the setting unit sets image forming conditions according to the determined type of the recording medium .
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003121812A JP4110033B2 (en) | 2002-04-25 | 2003-04-25 | Image forming apparatus |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002124430 | 2002-04-25 | ||
| JP2003121812A JP4110033B2 (en) | 2002-04-25 | 2003-04-25 | Image forming apparatus |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2004050815A JP2004050815A (en) | 2004-02-19 |
| JP2004050815A5 JP2004050815A5 (en) | 2006-06-15 |
| JP4110033B2 true JP4110033B2 (en) | 2008-07-02 |
Family
ID=31948901
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003121812A Expired - Fee Related JP4110033B2 (en) | 2002-04-25 | 2003-04-25 | Image forming apparatus |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4110033B2 (en) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4741811B2 (en) * | 2004-06-03 | 2011-08-10 | キヤノン株式会社 | Image forming apparatus |
| US7715740B2 (en) | 2007-04-16 | 2010-05-11 | Kabushiki Kaisha Toshiba | Image forming apparatus with a laser record medium detecting device |
| JP5594988B2 (en) * | 2009-06-30 | 2014-09-24 | キヤノン株式会社 | Recording medium imaging device and image forming apparatus |
| DE102015119444B4 (en) * | 2015-11-11 | 2018-01-18 | Protechna Herbst Gmbh & Co. Kg | Device and method for monitoring a running web |
| US10459388B2 (en) | 2015-11-19 | 2019-10-29 | Canon Kabushiki Kaisha | Image forming apparatus and recording material determination apparatus |
| JP2020121503A (en) * | 2019-01-31 | 2020-08-13 | セイコーエプソン株式会社 | Printing device, machine learning device, machine learning method, printing control program |
-
2003
- 2003-04-25 JP JP2003121812A patent/JP4110033B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2004050815A (en) | 2004-02-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4454914B2 (en) | Image reading apparatus and image forming apparatus | |
| JP4227351B2 (en) | Recording material type discriminating apparatus and image forming apparatus | |
| JP5388838B2 (en) | Recording material discrimination apparatus and image forming apparatus | |
| US7339702B2 (en) | Picture reading device for discriminating the type of recording medium and apparatus thereof | |
| JP2005017541A (en) | Image forming method and image forming apparatus | |
| JP4110033B2 (en) | Image forming apparatus | |
| US20100183325A1 (en) | Image Forming Apparatus and Method | |
| JP4440319B2 (en) | Paper surface detection apparatus and image forming apparatus | |
| JP2008083689A (en) | Discriminating device for discriminating recording material type and image forming apparatus | |
| JP4857321B2 (en) | Recording paper discrimination device and recording paper discrimination method | |
| JP5506713B2 (en) | Recording material surface detection apparatus and image forming apparatus | |
| JP2011079202A (en) | Recording medium detection device, and image forming apparatus | |
| JP2010107730A (en) | Image forming apparatus | |
| JP4857322B2 (en) | Image forming apparatus | |
| JP2006184504A (en) | Kind-discriminating device for recording material, and image forming apparatus | |
| JP2006264833A (en) | Recording material discriminating device and image forming device | |
| JP2008020262A (en) | Recording medium discrimination device, its method, and image forming device | |
| JP2005345927A (en) | Device for recording material discrimination, image forming apparatus and its method | |
| JP2005159800A (en) | Image reading apparatus and image forming apparatus | |
| JP2005215556A (en) | Recording material discrimination device and image forming apparatus | |
| JP2005202260A (en) | Image forming apparatus | |
| JP2008058198A (en) | Medium discrimination device, image forming apparatus equipped therewith and control method thereof |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060424 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060424 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20071227 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080108 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080307 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080401 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080407 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110411 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4110033 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130411 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130411 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140411 Year of fee payment: 6 |
|
| LAPS | Cancellation because of no payment of annual fees |