JP3923572B2 - Navigation device - Google Patents
Navigation device Download PDFInfo
- Publication number
- JP3923572B2 JP3923572B2 JP27899896A JP27899896A JP3923572B2 JP 3923572 B2 JP3923572 B2 JP 3923572B2 JP 27899896 A JP27899896 A JP 27899896A JP 27899896 A JP27899896 A JP 27899896A JP 3923572 B2 JP3923572 B2 JP 3923572B2
- Authority
- JP
- Japan
- Prior art keywords
- information
- output
- provision
- input
- priority
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images


























































































Landscapes
- Instructional Devices (AREA)
- Navigation (AREA)
- Traffic Control Systems (AREA)
Description
【0001】
【産業上の利用分野】
この発明は、例えば音声情報などを出力するナビゲーション装置に関し、特に、複数の情報が同時に存在する場合において、ドライバに真に必要な情報を規制的に優先的に出力するナビゲーション装置に関する。
【0002】
【従来の技術】
コンピュータ情報のマルチメディア化に伴い、自動車にも急速にマルチメディア化が進んでいる。例えば、情報の種類には、ナビゲーション情報、VICS情報、Audio Visual情報、ラジオ、車載電話、文字放送、車両システム等がある。
情報のマルチメディア化における最大の問題は大量情報の同時発生にある。特に、ドライバが関与しなくとも、例えば、VICS情報や音声多重放送等からの情報等が大量に送られてくる。自動車のマルチメディア化における顕著な特徴は、映像情報はドライバがその映像に関心を示さなければ、あるいはその映像の方向から視線を外せば、大量の情報が流されてもドライバの運転に影響を与えることはない。
【0003】
しかしながら、音声情報は、有用な情報と無用な情報とが混在している場合においては、有用か無用かを識別するにはドライバに意識を集中することを強いる。また、聞き流すこともなかなか困難であり、例えばドライバが緊急回避動作を行っているときに、それほどの必要性もない音声が流されたときには、そのような音声情報はドライバの運転操作に影響を与える場合もあり得る。
【0004】
特に音声情報の出力の規制について従来では、例えば、特開平5ー142994号、5ー203458号、5ー332778号では、主に音声情報出力時の音量を制御している。しかしながら、音量を制御すると、小さな音量の情報はかえってドライバに緊張を強いる場合がある。
また、特開平2ー114117号では、ドライバが音声によるナビゲーションを望むルートをドライバ自身が予め複数箇所設定できるようにしておき、不要な音声による誘導を排除するものである。
【0005】
また、特開平4ー1898号では、車両速度に応じて案内文の音声情報の長さを制御することにより、目標地点近傍を通過する時点と案内情報の出力が終了する時点とを同期させることにより、案内の内容と対象物との関連を取りやすいようにしたものである。
そこで、特開平5―118866号は、走行回数を累積することにより各道路についての熟知度を判定し、熟知度に応じて、音声情報のオン・オフを制御するようにしている。これは、熟知している道路では音声情報を提供することが不要であるので、音声情報をカットするものである。
【0006】
【発明が解決しようとする課題】
特開平2−114117号の手法でも、ドライバ自身が音声誘導を設定した箇所でマルチメディア情報が大量に発生した場合には、不要な音声を排除することはできない。また、特開平4−1898号のように、車両速度に応じて案内文の音声情報の長さを制御してたとえ長さを短くしたとしても、複数の情報が同時に大量に発生した場合には、目標地点を過ぎ去ってしまった時点で、その目標地点の情報が出力される場合もあり得る。
【0007】
また、特開平5―118866号の手法は、熟知していない道路を走行中に、複数の音声情報が同時に大量に発生した場合には、同じように、全ての音声情報が出力されることとなり、やはり、不要な情報が流されて真に必要な情報が後回しにされる場合もあり得る。
即ち、上記従来技術の全ては複数の情報が同時に存在することが意識されていないので、換言すれば、自動車マルチメディア時代の到来を予期していないので、まさに玉石混淆の状態で情報を垂れ流していた。
【0008】
本発明は斯かる点に鑑みてなされたものであり、その目的とするところは、緊急情報等の重要な情報を適切なタイミングで提供できるナビゲーション装置を提案するものである。
【0009】
【課題を解決するための手段】
上記の目的を達成すべく、本発明によれば、所定のタイミングで自動車の乗員に情報提供を行うナビゲーション装置であって、所定の最優先情報が入力されたか否かを判定する手段と、前記最優先情報が入力された場合に、他の情報の提供を規制し前記最優先情報を提供する割込手段と、前記自動車が走行中の走行路の種類を検出する検出手段と、を具備し、前記割込手段により提供が規制された前記他の情報は、前記検出手段が検出した現在の走行路の種類に応じて再提供されるか否かが前記割り込み手段により前記他の情報の提供を規制した際に決定され、再提供される場合は前記最優先情報の提供の終了後に再提供されることを特徴とするナビゲーション装置が提供される。
また、本発明によれば、所定のタイミングで自動車の乗員に情報提供を行うナビゲーション装置であって、所定の最優先情報が入力されたか否かを判定する手段と、前記最優先情報が入力された場合に、他の情報の提供を規制し前記最優先情報を提供する割込手段と、前記自動車の走行場所を検出する検出手段と、を具備し、前記割込手段により提供が規制された前記他の情報は、前記検出手段が検出した現在の走行場所に応じて再提供されるか否かが前記割り込み手段により前記他の情報の提供を規制した際に決定され、再提供される場合は前記最優先情報の提供の終了後に再提供されることを特徴とするナビゲーション装置が提供される。
また、本発明によれば、所定のタイミングで自動車の乗員に情報提供を行うナビゲーション装置であって、所定の最優先情報が入力されたか否かを判定する手段と、前記最優先情報が入力された場合に、他の情報の提供を規制し前記最優先情報を提供する割込手段と、前記自動車の走行地点の天候を検出する検出手段と、を具備し、前記割込手段により提供が規制された前記他の情報は、前記検出手段が検出した現在の天候に応じて再提供されるか否かが前記割り込み手段により前記他の情報の提供を規制した際に決定され、再提供される場合は前記最優先情報の提供の終了後に再提供されることを特徴とするナビゲーション装置が提供される。
また、本発明によれば、所定のタイミングで自動車の乗員に情報提供を行うナビゲーション装置であって、所定の最優先情報が入力されたか否かを判定する手段と、前記最優先情報が入力された場合に、他の情報の提供を規制し前記最優先情報を提供する割込手段と、前記自動車の車速を検出する検出手段と、を具備し、前記割込手段により提供が規制された前記他の情報は、前記検出手段が検出した車速が中低速か高速かに応じて再提供されるか否かが前記割り込み手段により前記他の情報の提供を規制した際に決定され、再提供される場合は前記最優先情報の提供の終了後に再提供されることを特徴とするナビゲーション装置が提供される。
【0010】
【発明を実施するための形態】
以下、本発明のナビゲーション装置及び方法を自動車のナビゲーションに適用した各種実施形態を図面に基づいて詳細に説明する。
〈システム構成〉
先ず、本発明の全ての実施形態(並びにそれらの変形例)に係るナビゲーション装置に共通なシステム構成を第1図〜第3図を参照して説明する。
【0011】
第1図は、実施形態のナビゲーション装置が適用された自動車のドライバ席から見た前方視界を表す図である。また、第2図,第3図は、本発明の一実施形態としてのナビゲーション装置が自動車に実装された状態の一例を示すシステム構成図である。
第2図において、2は集中制御ユニット(TWS)であり、走行状態に係る各種データ(燃料残量、平均燃費、平均車速等)の算出や、以下の各構成を統括的に制御する。3は車載LANユニットであり、例えばアンチロックブレーキシステム(ABS)や4輪駆動制御等の制御に必要な不図示のセンサ及び駆動部と集中制御ユニット2との所謂ローカルエリアネットワーク通信を制御する。4はRAMカードドライブであり、例えば、シート位置、ミラー位置等の運転者に関する情報を記憶したRAMカードのデータ読み込み/書き込み装置である。5はデータドライブであり、例えば、FD(フロッピーディスク)、MD(光磁気ディスク)、PD(相転移型光ディスク)等のデータ記憶媒体に記憶した各種情報の読み込み/書き込み装置である。6は音声ガイド用スピーカであり、ナビゲーションコントローラ17からの音声情報が集中制御ユニット2内の音声出力インタフェースを介して出力される。7はマイクであり、操作者の音声による指示が集中制御ユニット2内の音声認識インタフェース(不図示)を介してナビゲーションコントローラ17に入力される。8は液晶表示等のディスプレイであり、ナビゲーション画面、各種入力操作用の画面、車両の状態(車速、空調設定等)が表示される。更に、ディスプレイ8の前面には、その表示に応じてタッチ操作による入力操作が可能な、静電容量方式や赤外線方式等の入力装置を備える。9は携帯電話であり、電話アンテナ13が接続される。10は操作スイッチであり、集中制御ユニット2及びナビゲーションコントローラ17への入力操作を行う。17はナビゲーションコントローラであり、GPS(グローバルポジショニングシステム)アンテナ11からの位置情報とCD−ROMチェンジャ19に搭載されたCD−ROMの地図情報に基づいて、操作者が操作スイッチ10等により指定した目的地までの適当な経路を検索し、ディスプレイ8上の表示及び音声ガイド用スピーカ6からの音声出力により誘導を行う。CD−ROMチェンジャ19により読み出されるCD−ROMの地図情報は、ディスプレイ8に表示する経路情報の基本情報である。
【0012】
更に、ナビゲーションコントローラ17には、図示の如くFMアンテナ12からのVICS対応のFM多重放送を受信するFMチューナ16、そして電波ビーコンアンテナ14及び光ビーコンアンテナ15からのビーコン信号を受信するビーコン信号受信機18が接続されており、それらにより得られるVICS信号及び/またはビーコン信号を交通規制情報として解釈してディスプレイ8に表示し、経路誘導の際の経路検索の条件(制約条件)として使用する。更に、走行経路周辺の地域情報をデータドライブ5等から入力し、表示情報に利用してもよい。尚、GPSによる自車位置の検出手法は公知なため、説明を省略する。
【0013】
これから説明する実施形態のナビゲーションシステムでは、ドライバに不必要な、或いは多量すぎて不快感を与えかねない情報(特に音声情報)はその提供を抑制し、或いは出力しないようにしている。また、ナビゲーションシステムでは特に複数の音声情報が同時に発生した場合でも、一時には1つだけの音声情報をドライバに提供するのが本質であるから、1つの音声情報だけを、即ち、前記複数の音声情報の中から特定の1つの情報だけを選択する必要があるが、本実施形態のシステムでは、その1つの音声情報は、情報自体が持つ優先順位と、情報とは独立してある走行条件(走行状態、走行環境、走行時間帯、走行目的等)との関連性から生まれるその情報の「重要性」とに基づいて選択される。また、上述の競合があった場合には、所定の条件がそろえば、消去される情報も存在する。このような情報は、消去される旨がデイスプレイに表示され、或いはその音声情報が代わりに文字情報に変換されて第1図に示したヘッドアップデイスプレイに表示するようにする。
<ユーザインターフェース>
本システムのディスプレイ8にはタッチパネルが設けられている。
【0014】
第79図はそのタッチパネルを介して設定された情報を要求するスイッチを示す。本システムには、第79図に示すように、「ニュース」「天候」「スポーツ」「交通情報」「車両情報」「ガソリン」(GAS)等の6つのジャンルの情報にアクセスすることができる。第79図は、それらの情報にアクセスするための機能ボタン(タッチパネルを介したスイッチ)を示す。特定のスイッチを押すと、押されたスイッチに対応する情報のみがドライバに提供される。
【0015】
情報ジャンルスイッチは(第79図)は、現時点の走行状態において必要と思われるジャンルを表示する。たとえば、「GAS」のジャンルは、残ガソリ
ンが少ないという車両情報を集中制御ユニット2が受け、これに応答して、「GAS」メニューを表示したものである。この表示はドライバに要求されたものではなく、システムが種々の情報から判断して表示を決定したものである。第79図の他の例で、ワイパが動作すればシステムは雨が降ってきたものと判断して、「天候」のメニューを表示したものである。
【0016】
第80図は、本システムに用意された各種機能を要求するスイッチを示す。
「キャンセル」スイッチは今選択中の情報へのアクセスをキャンセルするものである。「リピート」スイッチは、現在案内中の情報(データドライブ装置5に記憶されている)を、最初の項目から再生する。「音声メイン」スイッチは、音声での情報案内を行うかどうかを切り換える。
【0017】
「音声要求」スイッチは、本システムに特有なスイッチで、このスイッチを押すと、本ナビゲーションシステムに具備されている種々のマルチメディア情報を、所定の順序で提供する。
「スキップ」スイッチは、項目もしくはジャンルを、1つ飛ばす機能を有する。
【0018】
「選択」スイッチは、情報のジャンルを選択して決定する機能を有する。「ファンクション」スイッチは特定の項目を記憶させ、その情報だけを直接案内する機能を有する。
〈メディア及び情報の種類〉
第1図〜第3図に示した本実施形態のナビゲーションシステムで対象となる情報のメディアは、NAVI,VICS,オーディオ,ラジオ,車載電話、文字放送,車両システム等である。そして、これらのメディアからの情報には第4図に示すように、
車両情報,
NAVI情報,
VICS情報,
オーディオ,
車載電話情報,
文字放送情報
等があり、これら情報の具体的な例は第4図に示すとおりである。
〈優先順位,走行条件による情報提供の規制〉
本実施形態のナビゲーションシステムでは、上述の車両情報,NAVI情報,VICS情報,オーディオ, 車載電話情報、文字放送情報等を、ナビゲーションに必要な情報として利用する。しかしながらマルチメディアナビゲーションシステムでは、提供すべき情報が同時に発生することが常態となることがあり得、同時多発の情報提供はドライバに不快感を与えかねず、ひいては対応しきれない情報提供はドライバに混乱をもたらすことになる。情報が音声情報であるときには特にそうである。
【0019】
そこで、本発明の種々の実施形態のナビゲーションシステムは、同時に情報が存在するときに、重要な情報に優先順位を与え、或いは、所定の条件において不要と考えられるメディアからの情報を規制することにより、ドライバに必要な情報を提供することを特徴とする。
第5図は、これから説明する各種の実施形態において、ドライバが選択可能なマップの例を示す。
【0020】
一般に、車両が走行している過程では走行条件(例えば、車速,車間距離,オートクルーズ状態等)が色々と変化する。第1実施形態では、走行条件の変化に応じて情報規制の態様を異ならせるものである。但し、マルチナビゲーションシステムでは、情報とは、規制すべきではなく緊急性の高い緊急情報(事故情報)から、音楽番組のタイトル等のように全く緊急性のない情報まで多岐に亙る。情報提供の規制は、提供時の走行条件に応じて決定されるべきであり、そのために、これら実施形態では走行条件の変化に応じて情報規制の態様を異ならせるのである。但し、走行条件といっても、各ドライバによって、また、ドライバが走行している道路などによってもまちまちであるので、本実施形態では、走行条件を、第5図に示すように、「車両状態」、「走行状態」、「走行環境」、「走行目的」、「時間帯」、「ドライバの状態」、「情報の精度」の7種類に分類している。即ち、走行条件を7種類に分類し、各走行条件に対して情報の規制態様を規定するマップを設定する。一方、ドライバに対しては、各走行条件について、第5図に示すような参照項目をドライバに表示(デイスプレイ8に)することにより、どのマップを選択すれば、どのような情報規制が行われるのかを予測できるようにしてある。
【0021】
マップの選択は第16図の制御手順(後述)に従って行われる。
〈データ,テーブルなどの定義〉
先ず、「走行状態」に応じた情報提供の規制を、第1実施形態として、第4図〜第23図等を用いて説明する。
【0022】
第6図は、第1実施形態のみならず他の実施形態のシステムにおいて発生する情報の種類、並びに、情報の種類に前もって与えられている各種属性を定義するテーブルを示す。情報の種類として、「緊急情報」,「車両情報」,「VICS情報」,「交通情報」,「NAVI情報」,「天候情報」,「ニュース」,「スポーツ情報」,「イベント情報」,「音楽タイトル」の10種類を設定している。特に、第6図のテーブルは、各種類の情報について、「種類」KND,「順位」(優先順位)PRD,「ランク(D値)」RKD,「ランク(補正値)」RKC,「容量(D値)」CAPD,「容量(変更値)」CAPC,「残量」REM,「ポインタ」PTRを定義する。
【0023】
各メディアから入力された情報には、その情報に対応した「優先順位」PRD,「ランク(D値)」RKD,「ランク(補正値)」RKC,「容量(D値)」CAPD,「容量(変更値)」CAPC,「残量」REM が付されて予定のメモリに記憶される。具体的には、各情報にはその種類を表す識別子KNDが付される。例えばKND=3の情報はVICS情報である。また、各種類の情報には前もって「優先順位」PRDが設定されている。「優先順位」PRDの値は、その情報を提供する際の優先順位を示すもので、例えば、VICSメディアから入力された情報には、KND=3の識別子が与えられ、その優先順位PRの値は“3”である。優先順位はその値が小さいほど高い優先順位を示す。従って、車両火災やトンネル事故などの「緊急情報」(KND=1)が最も高い優先度を与えられる。第6図に示す「優先順位」PRDはデフォルト値を意味し、そのデフォルト値からドライバが所定の操作により値を変更することができる。変更された優先順位値PRCは第6図のテーブルのPRC(同図において不図示)に記憶される。
【0024】
「ランク(D値)」RKDとは優先順位のランクの値(但しデフォルト値)を意味し、値として、“A”“B”〜“E”が一例として設定されている。「ランク」は、優先度の目安を示し、第6図の例では、「VICS情報」(PRD=3),「交通情報」(PRD=4),「NAVI情報」(PRD=5)には、同じ「ランク(D値)」(=C)が与えられている。ランク値がどのように制御に活かされるかは制御手順の説明で明らかになる。
【0025】
「容量(D値)」CAPDとは、その種類の情報に許されている記憶領域の容量値(デフォルト値)を意味する。第7図はメモリ領域の設定の一例を示す。このように、各種の情報には、その情報に応じて記憶容量の制限はあるが、緊急情報はその重要性に鑑みて制限されるべきではない。そこで、第7図に示すように、緊急情報だけは「緊急情報」に与えられた容量を超えた場合には、「フリー領域」(第7図中の4MBの領域7)に待避可能である。
【0026】
各種情報に設定された容量CAPDは後述するように変更可能である。第8図は変更画面を示す。変更された容量値は第6図のテーブルのCAPCに記憶される。
第6図のテーブルの「残量」REMは、対応する種類の情報に対して残されている記憶領域の残量を記憶する。もし、残量を超えた情報が入力されようとしたときには、その情報が緊急情報である場合を除き、文字情報(変換が可能ならば)に変換されて記憶されない。
【0027】
ポインタPTRは、入力情報があったならばその情報を記憶すべきメモリ上の位置を示す。第9図は入力された情報及び出力する予定の情報のリストを示し、キューテーブルを構成する。具体的には、ある時刻t3において、その時刻t3迄に入力された情報がどのように記憶されているかを示すテーブルである。第9図の例では、時刻t1に、データ=Xの車両情報(KND=2)が、時刻t2にデータ=Yの交通情報(KND=4)が、時刻t3にデータ=Zの緊急情報(KND=1)が入力されたことを示している。次ぎに情報の入力があった場合には、ポインタrによってしめされる位置のテーブル中に格納される。
【0028】
第9図の「入力キュー」IQは情報の入力があり、この情報の処理を要求することを示すフラグである。「出力中」フラグOUTPが“1”であることは、この情報が現在出力(提供)されていることを示す。また、「出力キュー」フラグOUTQが“1”であることは、対応する情報が出力されるべくキューイングされている(まだ出力されてはいない)ことを示す。
〈第1実施形態〉…走行状態に応じた情報提供の規制
先ず、「走行状態」に応じた情報提供の規制を、第1実施形態として、第4図〜第23図等を用いて説明する。
【0029】
第10図は第1実施形態の制御手順のメインルーチンを示す。
本ナビゲーションシステムは不図示のイネーブルスイッチ(EN−SW)のオン/オフによってその動作の付勢(ステップS100)/消勢(ステップS700)を規定される。即ち、EN−SWがオンされている限りは、ステップS101〜ステップS600のメインルーチンが実行される。
【0030】
ステップS101は、種々の情報の入力ルーチンである。即ち、ステップS101では、各種マルチメディアからの情報入力(ステップS300=第14図)や、ドライバがマップを選択するための情報の入力ルーチン(ステップS200=第16図)や、選択したマップ中のデータを補正もしくは変更するための情報の入力ルーチン(ステップS400=第15図)が実行される。
【0031】
ステップS120では、入力情報テーブル(第9図)をスキャンして、入力キューフラグIQが“1”となっている情報(音声情報として処理されるべき情報)を探す。そのような情報が見つかったならばステップS500に進み、その情報を提供すべきな否かの制御動作を行う。ステップS500の詳細は第18図に示される。
【0032】
第1実施形態の制御の特徴は第13図と第11図のテーブルによってしめされる。
即ち、第13図に示した優先度下限テーブルは、音声として提供すべき情報があるときに、その提供時点における車両の走行状態STATと、その情報のランク値RKCを規制する下限値RKLMTとの関係を定義する。
【0033】
今、例えば第9図の如き入力情報(X,Y,Z)が、提供されるべき音声情報として、メモリに記憶されているとする。そして、現在の車両が急制動状態のときは、下限値RKLMTはAであるから、ランク値がA以上の優先度を持つ情報のみが提供されるべき情報として認識される。従って、この時は、ランク値がそれぞれ“B”及び“C”である情報XとYは音声情報としては提供されない。
【0034】
一方、現在の車両が後退状態のときは、下限値RKLMTは“C”であるから、ランク値が“C”以上の優先度を持つ情報のみが提供されるべき情報として認識される。従って、この時は、ランク値がそれぞれ“A”及び“B”及び“C”である情報XとYとZの全て(第9図の例では全て)が音声情報としては提供される。
【0035】
このようにして、第1実施形態では、音声情報として提供すべき情報が同時に複数存在する場合に、走行状態(第13図のSTATで示される例えば7つの状態)に応じて決定される優先度限度RKLMT(優先順位の程度)に従って、提供される情報が選別される。
優先度限度RKLMT(優先順位の程度)による情報提供の規制は、優先度限度RKLMT以上のランクを有する情報が複数ある場合には、これらの情報の提供に優先順位を与えることはできない。そこで、第1実施形態では、優先度限度RKLMTでは優先順位が存在しないような情報間に、絶対的な優先順位を与える目的で、情報の種類KNDに一義的に割り当てられている優先順位PRCに従って情報の提供に一義的な順序関係を与えるものである。
【0036】
優先度限度RKLMTに従った情報提供の規制を行うことによって、走行状態によっては当然に考慮する必要のない情報を制御対象から除去することにより、優先順位PRC(或いはPRD)に従った情報提供の規制を効率的且つ確実に行うことができる。
次ぎに、第17図〜第23図を用いて、第1実施形態の、情報入力制御、情報提供制御の詳細を説明する。
【0037】
何らかの入力があったときには、第10図のステップS101で、その入力はマルチメディア情報の入力か、マップを選択するためのドライバによる入力か、マップのデータを補正するためのドライバによる入力かを判断する。
入力項目の選択は、デイスプレイ8上に表示されているアイコンスイッチの選択を操作スイッチ10を介して行うことにより実現され、このアイコンの制御は周知であるので説明は省略する。
【0038】
マップを選択するための入力(マップ選択メニューの選択)があったときには、第16図のステップS204で選択可能なマップの項目をデイスプレイ8上に例えば第5図のように表示する。ドライバ(ユーザ)はデイスプレイ8の表示画面上において操作スイッチ10を操作して所望のマップを選択する。システムはステップS206でユーザが指定したマップの識別子IDを入力し、ステップS208で選択されたマップを表示する。ユーザがもし、ID=2の「走行状態」を選べば、第13図に示したような「走行状態に対応する優先度下限の定義テーブル」が表示されるであろう。
【0039】
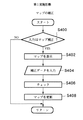
ユーザがステップS101でマップの補正を選択すれば、第15図のステップS400以下が実行される。即ち、ステップS400で。レジスタIDに保持されている値に対応するマップがディスプレイ8上に表示される。ステップS402では、ユーザが入力したマップデータの補正値を入力する。例えば、ユーザが第13図のマップにおいて走行状態「後退」の下限値RKLMTを現在の“C”から“B”に変更することができる。ステップS404では、データの補正と既存のデータとの整合性のチェックを行う。例えば、ユーザが第13図のマップにおいて走行状態「後退」の下限値RKLMTを現在の「C」から「E」に変更した場合、「後退」の下限値RKLMTに“E”があり得ないとしていた場合にはエラーとして認識される。ステップS406では補正後のデータによってマップを更新する。
【0040】
ステップS101でマルチメディア情報が入力されたことが検知された場合には、第14図のステップS302以下を実行する。即ち、ステップS304で、当該入力情報の種類KNDを認識する。情報の種類は、本実施形態では、前述したように、「緊急情報」など10種類を設定しているが、集中制御ユニット2は、情報のソースに応じてそのソースからの情報に種類KNDを割り当てる。また、情報によっては、情報中の特定のフィールドに前もって定められた情報の種類を示す識別子を有するものがあり、このような情報にはその情報自身が示すその種類を優先して割り当てる。ステップS306では、当該種類の情報KNDに関するデータ、例えば、「優先順位」PRD並びに「ランク値」RKCを第6図のテーブルから参照して、第9図の情報入力テーブルに格納する。ステップS308では、当該入力された情報のデータ量DVを調べる。ステップS310ではデータ量DVと、この種類の情報に許されている記憶領域の残量REMKNDとを比較し、記憶できる余地があるかを調べる。
【0041】
DV≦REMKND(ステップS310でNO)であれば、当該情報を記憶できるので、データドライブ5中の所定の領域に記憶する。ステップS322では、データドライブ5中における次の記憶領域を示すためにポインタPTRを更新する。そして、ステップS324では、情報テーブル(第9図)中の当該情報に対応する入力キューフラグIQ(第9図テーブル中でポインタrによって参照される)を“1”にセットすることにより、情報が入力されたことを示して当該情報の処理を要求する。ステップS326ではポインタrを更新する。
【0042】
DV>REMKNDであるということは、その情報を記憶するほどには記憶領域に残がないことを示しているので、ステップS328で当該情報が緊急情報が否かをその情報のKNDに基づいて調べる。緊急情報であれば、ステップS340でフリー領域(第7図参照)に緊急情報を待避させる。ステップS342では、当該情報(緊急情報)のための記憶領域を示すポインタPTRを、それが次の格納位置を示すように更新する。そして、ステップS342では、情報テーブル(第9図)中の当該情報に対応する入力キューフラグIQ(第9図テーブル中でポインタrによって参照される)を“1”にセットして、情報が入力されたことを示して、当該情報の処理を要求する。ステップS344ではポインタrを更新する。
【0043】
尚、記録領域を節約するために、不要となった情報は定期的に除去するようにしてもよい。ここで「不要となった情報」とは、一定時間経過した情報、既に通過してしまった地点に関する交通情報、ラジオを聴いていないときの曲名などである。緊急情報ではない情報が入力されたが、記憶残量が足りない場合には(ステップS328でNO)、ステップS330で、表示モードが設定されているかを調べる。表示モードスイッチは、識別子ID=8のスイッチであって、第25図に示すように、情報提供が規制される予定の音声情報を代わりに表示装置(第1図のヘッドアップデイスプレイ)に表示するか、音声情報が規制されたことを示すメッセージを表示するかを指定することができる。第25図中のENスイッチを選択すると、音声情報が規制された場合に代替表示をユーザが望んでいることがシステムに通知される。「変換表示」が選択されると、音声情報が文字情報に変換されて代替出力されるモードが選択され、「メッセージ表示」が選択されると、音声情報が規制されたことを意味する文字メッセージによる代替表示が行われる。「変換表示」モードにセットされていれば、ステップS338で、当該音声情報を文字データに変換してからヘッドアップデイスプレイに表示する。デイスプレイ8に表示せず、ヘッドアップデイスプレイに表示するのは、ドライバが「表示モード」を選択していることは、情報がたとえ重要でないものであっても完全に報知されないことをドライバが望まないことを意味しているからで、よりドライバの注意を喚起するヘッドアップデイスプレイに表示する。
【0044】
「メッセージ表示」モードがセットされていれば、ステップS332で、記憶されない情報があることを示すメッセージをデイスプレイ8に表示する。ヘッドアップデイスプレイに表示しないのは、「表示モード」を選択していないことはドライバが表示によって煩わされたくないことを意図しているからである。
このように、実施形態のシステムでは、メディア別に、ひいては情報の種類に応じて記憶領域を設定することにより、発生頻度の高い情報(重要度は低いかも知れない)によってデータ記憶装置5が特定の情報によって占有されることを未然に防止する。また、記憶領域をユーザが指定することを許すことにより、そのユーザにとってより重要な情報にはより多くの領域を割り当てせしめることにより、重要な情報が記憶されないことを防止する。さらには、緊急情報には特別の領域(フリー領域)を設けることにより、緊急情報の受信に備えることができる。
【0045】
第14図のフローチャートに関連して説明したように、情報の入力があれば、その情報には処理されることを要求するフラグIQが“1”にセットされている。ステップS120では、データ記憶装置5に記憶されている情報のフラグ(IQx)のセット状態を調べる。即ち、ステップS120では、全ての情報について、
IQx=0
であるか、IQx=1である全ての情報は既に出力処理がなされている、即ち、
IQx=1
である全ての情報xについて
OUTPx=1
ならば、ステップS500,ステップS600は実行されない。一方、ステップS120で、
IQx=1
であり、且つ
OUTPx=0
であるような情報xが存在する場合には、ステップS500の「情報提供制御」(詳細は第17図)手順を実行する。
【0046】
第17図のステップS502において、当該情報の引数xをレジスタnに待避する。ステップS504では、車両の走行状態STATを調べる。車両の走行状態STATには、「急旋回」「急制動」「後退」「車線変更」「右左折」「急加速」「通常」の7種類を想定している。ステップS506では、検出した走行状態STATに従って「優先度下限値RKLMTの定義テーブル」(第13図)から下限値RKLMTを読み取る。ステップS508では、要求された情報のランク値RKCと下限値RKLMTとを比較し、
RKCn≧RKLMT
である情報のみをステップS520で情報提供の考慮対象とする。従って、
RKCn<RKLMT
であるような情報nは情報提供が待たされる。即ち、ステップS510に進んで、第9図の待ち行列を更新する。この更新はステップS508で一旦チェックされた情報nは待ち行列の最後に移動させることにより、おなじ情報が連続して第17図の処理の対象となることを防止する。尚、ステップS510での処理として、情報提供(即ち、音声出力)を待機させる制御の代わりに、当該情報をクリアするようにしてもよい。
【0047】
第26図に、ある走行状態(急旋回)中に発生した情報が、その走行状態が解除(例えば、通常走行への移行)されるまで情報提供が延期される様子を示す。このように、本実施形態では、複数の情報が提供すべきものとして同時に複数存在する場合に、走行状態に応じて適正な情報(RKC≧RKLMT)のみを選別して情報提供の対象とすることにより、真に必要な情報を選別してドライバに提供することとなり、ドライバに不快感を与えることがなくなる。
【0048】
ステップS508で、 RKCn≧RKLMTと判定されれば、当該情報nは情報提供の考慮対象であるから、ステップS520で、この情報nが情報提供すべきであるか否かを最終的に判断する。第1実施形態では、この判断は優先度PRとランク値RKに応じて行う。
次ぎに、ステップS520で行われる「優先度に応じた情報の提供」サブルーチンについて説明する。このサブルーチンは第18図により示され、制御の概略は第12図により説明される。
【0049】
第1実施形態では、第13図のテーブルRKLMTは走行状態に応じて提供が必要な情報と必要でない情報とを区別するものである。この下限値RKLMTだけでは、同じランク値RKCを有する情報が同時に存在した場合には、それらの情報のどちらを優先すべきか決定できない。そこで、第1実施形態では、出力タイミングの緊急度レベルLVLというものを、その情報のランク値PRCとその時点での走行状態STATとに基づいて定義し、このレベル値LVL(=1〜3)に基づいて競合する情報の調停を行う。
【0050】
第11図は、情報(入力情報または出力中の情報)のランクと、その時点の走行状態STATとに基づいて決定されるべき、当該情報の出力タイミング(出力の緊急度)を示すレベルLVLの生成論理を説明する。このレベルLVLは、第12図に示すように、情報の出力(提供)のタイミングを決定するのに使われる。即ち、LVLは、情報(これから出力されるべき情報、または、現在出力されている情報)がキューイングされて存在するときに、その情報は、その情報が有するランク値RKCとその時点の走行状態に鑑みて、その情報がこれから出力されるべき情報であるならば、出力を行うべきか或いは待機させるべきかを判断し、または、その情報が現在出力されている情報であるならば、その出力を継続させるべきであるか中断させるべきであるかを判定するのに使われる。
【0051】
第12図は、第18図における制御手順の結果を図示したものである。具体的には、第12図に示すように、レベルLVLは、既に出力されている情報(便宜上、「出力中情報」と呼ぶ)が存在するか否かに応じて、使われ方が異なる。即ち、LVLは、「出力中情報」が存在していない最中に「入力情報」が発生した場合には、その入力情報をどのように処理するのかを判断するのに使われる。また、「出力中情報」が存在する場合には、LVLは、その「出力中情報」の出力を中止するのか否かの判断に用いられる。
【0052】
出力中情報がない場合には、ステップS522でNOと判断される。次ぎに、ステップS550で入力情報nのレベルLVLnの値を調べる。LVLnの値が“1”の時はステップS554に進み、その入力情報の提供を行う。具体的には、ステップS554で当該情報nの出力キューフラグOUTQnを“1”にする。これにより、レベルLVLnが“1”である入力情報は出力されることになる。 LVLnが“1”である入力情報とは、例えば、あらゆる走行状態においてランクが“A”の情報を、ランクが“B”または“C”については走行状態が「後退」「車線変更」「右左折」「急加速」「通常」のみである場合における情報を、ランク“D”については走行状態が「車線変更」「右左折」「急加速」「通常」のみである場合における情報を、ランク“E”については通常走行状態のみにおける情報を、いうものとする。
【0053】
入力情報のレベルが“2”であるときには、第18図の制御手順は何も行わない。第11図から明らかなように、レベルが“2”の情報とは、「急旋回」「急制動」及び「経路誘導中」状態においてはランクが“B”“C”“D”である情報を、「後退」状態においてはランクが“D”の情報を、「右左折」「急加速」「経路誘導中」状態においてはランクが“E”の情報を、いう。レベル“2”の情報、例えば急旋回中や急制動中の「車両情報」等は、緊急性がないので提供の必要はない。そこで、そのような入力情報は待機されるべく、ステップS552から元のルーチンにリターンするのである。尚、待機された入力情報は、走行条件が変化すれば、例えば、「急制動中」状態であるがために待機させられた「車両情報」は、車両が「車線変更」状態に移行すれば、待機は解かれ、出力される(他に競合する情報がなければ)ことになる。
【0054】
第27図に、LVL=2の情報が待機される例を示す。一方、入力情報がレベル“3”の情報であった場合には、ステップS560以下に進む。レベル“3”の情報とは、「急旋回」「急制動」「後退」状態におけるランク“E”の情報をいう。かかるレベルの情報は緊急性がないので、提供は禁止され、情報自体もクリアされる。即ち、ステップS560において、当該情報nのキューフラグIQnはリセットされ(第9図のキューテーブルからも削除される)、ステップS562で音声データ自体もクリアされる。S564では、音声情報がクリアされたことを報知するメッセージがデイスプレイ8に表示される。
【0055】
出力中情報がある場合(ステップS522でYESの判断)には、ステップS524に進み、その出力情報の引数xをレジスタkに待避する。ステップS528で、その出力中情報のレベルLVLkの値を調べる。
出力中情報のLVLkの値が“1”の時は元のルーチンにリターンする。即ち、出力中情報のレベルが“1”である場合には、その出力中情報の出力も継続されるものの、入力情報についてはその提供はなされないので待機されることになる。LVLnが“1”である出力中情報とは、第11図の定義に従えば、「急旋回」「急制動」「経路誘導範囲」の走行状態においてはランク“A”の情報を、「後退」時においてはランク“C”以上の情報を、「車線変更」「右左折」「急加速」状態においてはランク“D”以上の情報を、「通常」状態では全てのランクの情報を意味する。レベル“1”の出力中情報は、このように、緊急性のある情報もしくは該当する走行状態においては出力することに問題はない情報であるので、その出力中情報の出力を継続するのである。
【0056】
ここで、レベル“1”の状態において出力中情報が存在している時にランク“A”の入力情報(例えば「緊急情報」)が発生した場合が問題となる。特に、その出力中情報のランクが“A”よりも低い“B”のような場合には、このランク“A”の入力情報が待機させられる可能性があるからである。第11図のレベル設定に従えば、そのランク“A”の入力情報が待機させられるのは、そのランク“B”の出力中情報が、「緊急旋回」でも「緊急制動」でもない走行状態において、出力されているときである。従って、「緊急旋回」でも「緊急制動」でもない走行状態において、ランク“A”の入力情報が待機させられても、問題は発生しない。さらに、この第1実施形態では、ステップS508(第17図)の動作により、「緊急旋回」「緊急制動」中は、ランク“A”以外の入力情報が出力されるべく処理されることはない。従って、「緊急旋回」または「緊急制動」中においてランク“A”の入力情報が発生したときに、ランク“B”以下の情報が既に出力されているという事態は第1実施形態によっては発生し得ない。
【0057】
ステップS528により、出力中情報がレベル“2”の情報であると判断された場合には、ステップS530において、その出力中情報の出力状態を解除するために、フラグOUTPkをリセットし、ステップS532において、その出力中であった情報kを出力待ち状態にすべく、フラグIQ kを“1”にセットする。出力を中断された情報が次ぎに出力されるのは、中断の原因となった走行状態が変化した場合である。
【0058】
ここで、レベルが“2”の出力中情報とは、第11図から、「急旋回」「急制動」及び「経路誘導中」状態においてはランクが“D”以上の情報を、「後退」状態においてはランクが“D”以上の情報を、「右左折」「急加速」「経路誘導中」状態においてはランクが“E”以上の情報をいう。レベル“2”の情報は、その出力が中断されても緊急性は低いから問題はない。
【0059】
第28図に、急旋回中に出力されていた情報kが、他の情報nが発生したために、LVL=2に変化されて、出力を中断され、その後に走行状態の変化により、提供が再開される様子を示す。
ステップS528で、出力中情報がレベル“3”の情報であると判断された場合には、ステップS542に進んで、当該情報kのフラグOUTPkをリセットすることにより、その出力中情報の出力を停止する。さらに、ステップS544で当該情報のデータをクリアするので、その情報は将来出力されることはない。ステップS546では、データがクリアされたことを報知すべく、デイスプレイ8に表示する。
【0060】
尚、データをクリアすることなく、単にキューフラグをリセットしたままで残しておいてもよい。前述のリピートスイッチ(第80図)が有効に使える。
以上のようにして、優先度ランクに応じて、走行状態に応じて、情報の競合状態に応じて、入力された情報が出力キューに戻され(OUTQ=1)、或いは出力中であった情報が出力を中止されて出力キューに戻された場合には、ステップS600(詳細は第19図)の出力ルーチンによって、キューに入れられた出力要求はドライバに出力される。即ち、第19図のステップS602では、出力キューに入っている情報が取り出される。出力キューに入っている情報の番号はレジスタxに格納される。ステップS604では、連続的に出力された情報の回数がチェックされる。その詳細は後述する。
【0061】
連続出力の回数がリミット内であるならば、ステップS606で、他の情報が出力としてキューイングされていないことを確認して、ステップS608,ステップS610で当該情報mを出力中とマークする(OUTPm=1)。そして、集中制御ユニット2内の不図示のディジタルシグナルプロセッサ(DSP)に音声で他を出力して音声として提供する。ステップS614は、情報の出力開始時刻をレジスタTMSTに格納する。ステップS614からメインルーチン(第10図)のステップS700にリターンする。
【0062】
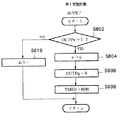
DSPを介しての音声情報出力はやがて終了する。その終了は割り込みとして検知される。出力完了割り込みがあると、第20図の制御手順が起動される。同図のステップS802において、出力中であったキューが少なくとも1つ存在することを確認する。ステップS804で出力中であったキューの情報の番号をレジスタqに格納する。ステップS806では、出力が終了したことを示すために、出力キュー(OUTP)をリセットする。ステップS808では終了した時刻をレジスタTMEDに格納する。
【0063】
ここで、第19図の回数チェックルーチンについて説明する。
情報、特に音声情報が連続して出力されることはドライバにとって不愉快なものとなるので、過度に連続して発生した音声情報はカットしてドライバに提供しない方が好ましい。但し、規制すべき連続回数は走行状態に応じて変化すべきであるから、本実施形態では、第21図に示すように、制限回数LMTを定義している。
【0064】
第24図は第1実施形態における「連続出力」の定義を説明する。ドライバが出力が連続的に行われていると感じるのは、第24図に示すように、1つの情報の出力の終了時点(=TMED)から次の情報の出力の開始時点(TMST)までの時間差が小さい場合である。時間差の閾値をδとすると、
TMST−TMED<δ
であるような情報の出力シーケンスがLMT回重なると不愉快に感じるものと定義する。そこで、LMT回だけ連続して情報が出力されたならば、それ以降にキューイングされている入力情報はキューから取り除かれるものとすることによってドライバが不快感を感じるのを防止する。但し、制限回数LMTは走行状態によって変化があってしかるべきである。そこで、第1実施形態では、第21図に示すように、制限回数LMTを走行状態によって差を付けることとする。即ち、車両が急動作(急旋回や急制動)を行っているときは情報は除去されるべきではないから、急旋回や急制動状態では、LMTには制限は設けない、しかし、運転状態が通常状態に近ければ近いほど、ドライバはよりゆとりを持って運転をしているから、換言すれば情報提供に煩わしさを感じる度合いはより減るから、制限回数LMTをより大きな値とする。
【0065】
回数のチェックは出力が開始される時点で行えばよい。即ち第19図の出力ルーチンが実行される毎にステップS604(詳細は第22図)が実行される。第22図のステップS572において、 TMST−TMEDが演算される。ステップS574ではこの差が閾値δよりも大きいかがチェックされる。大きい場合はそれまでの連続出力は問題がない程度のものであったのであるから、ステップS582で、連続出力の回数を記憶するカウンタCNTRをリセットする。
【0066】
一方、閾値δを超えるような時間差があった場合には、ステップS576に進み、カウンタCNTRをインクリメントする。ステップS578では、計数値CNTRと現時点での走行状態STATに応じた制限回数LMTとを比較し、計数値CNTRがLMTを超えている場合には、ステップS580で、出力テーブルにキューイングされている情報出力要求(IQ=1)を探索する。そしてステップS590で情報出力のキューをリセットする。
【0067】
ステップS590の消去ルーチンの詳細は第23図に示されている。即ち、ステップS592で、現在の走行状態が急旋回もしくは急制動状態の時は、元の第22図のルーチンにリターンするので、キューのリセットは行われない。急旋回もしくは急制動状態のときは情報の消去は行わない方が好ましいからである。一方、急旋回もしくは急制動状態でないときは、ステップS594で、そのときの走行状態に応じてキューをリセットする。尚、ステップS594でのキューの消去はランクが“A”である入力情報には行なわれないようになっている。
〈第1実施形態の効果〉
以上説明した第1実施形態のナビゲーションシステムによると次のような効果が得られる。
1:特に音声情報の入力源をマルチメディアとすることにより、豊富な情報量が保証されて経路誘導指示がより適切なものとなる。
1−1:音声情報がマルチメディア化すると、過度に大量の音声情報の提供が行われて、逆に不快感を与えたり、重要な情報を聞き逃すといった事態の発生が懸念されるが、第1実施形態では、メディア毎に情報提供の規制の手法を異ならせている(メディア毎に、優先順位PR、優先ランクRK)ので、その情報のソースたるメディアに適した情報提供の規制を行うことができる。
1−2:現在の走行状態に応じた情報提供の規制を行っているので、その走行状態に最適な量もしくは種類の情報が的確にドライバに与えられる。
【0068】
特に第1実施形態では、第13図に示すように、走行状態によっては不要な情報を前もってカットするようにしている。
また、第11図及び第12図のテーブルに示したように、走行状態STATと情報のランクRKの双方に基づいて情報の出力のタイミングの緊急度レベルLVLを判断しているので、走行状態STATだけ、或いは情報ランクRKだけに基づいた情報提供タイミングの画一化が防止される。情報の提供は、情報の性質(ランク、即ち重要性)と現在の走行状態(緊急性)の双方に基づいて決定されるべきであるからである。
【0069】
また、第21図に示すように、連続出力に制限を設けることにより、ドライバに不快感を与えないようにした。さらに、その制限回数を走行状態に応じて変更することにより、走行状態によって重要となる情報が失われるのを防止した。
2:第1実施形態のシステムでは、異なる情報が複数同時に発生したときに、優先度(ランク)もとづいて出力順位が決定されている。重要度の高い情報を優先的に出力することによりナビゲーション情報がドライバに適切に提供されることになる。
2−1:優先順位の低い情報は提供を中止する(第13図のRKLMTによる規制、及び第12図のレベル3情報の出力禁止)ことにより、ドライバへの提供情報が中止される。
2−2:優先順位を定義したテーブルを補正可能とすることによりユーザの好みに合わせたナビゲーション情報の提供が達成される。
3:提供を中止された音声情報は、情報そのものを、或いは中止した旨のメッセージをデイスプレイに表示することにより、情報の消失防止と不快感の減殺を両立した。この代替表示も操作者の好みによって付勢或いは消勢可能とした。
4:第7図,第8図に示すように、メディア毎に情報を記憶するメモリの記憶容量を設定できるようにした。大量に発生する(不必要な)情報によってメモリの記録領域が満杯になるのを防止できる。しかも、容量をユーザが設定できるようにしたので操作性が向上する。さらに、重要な情報(緊急情報)については別途ユーザが関知できない領域に特別な記憶領域を確保しているので、そのような情報が記憶領域不足により記憶されないことが防止できる。
〈第1実施形態の変形〉…第1変形例
(音声データ→表示データ)
この第1変形例は、前記第1実施形態の制御(第10図〜第28図)に対して変形を加えたものである。第1実施形態では、急旋回状態または急制動状態の時にランク“B”の音声情報(車両に関する情報)が発生すると、ランク“B”の情報は比較的に重要度が高いということで、LVL=2が与えられ、他の情報との競合次第では、その音声情報がドライバに提供されることがある。
【0070】
この第1変形例は、急旋回状態または急制動状態において、ランク“B”の情報が発生したときには、そのランク“B”の情報が比較的に重要度が高いことに鑑みて、LVL=1の提供タイミングレベルを与えることにより確実に情報としてドライバに提供することを保証しつつも、そのランク“B”情報が文字情報ならば音声情報に変換せずに、または音声情報ならば文字情報に変換して、ドライバに提供することにより、急旋回状態または急制動状態において音声によりドライバの注意力を散漫にしないことを目的とする。
【0071】
第67図は、第1変形例の制御に用いられる提供タイミングレベルの設定テーブルを示す。第1実施形態のそれ(第11図)と異なる点は、上述したように、急旋回状態または急制動状態においてはランク“B”情報に対してLVL=1を与えるが、提供形態はあくまでも表示に留める点にある。
第1変形例は、実質的に第1実施形態の制御手順を援用するが、第1実施形態の「優先度に応じた処理」ルーチン(第18図)を第68図の制御手順に置き換える。即ち、この第1変形例の制御は、LVL=1のレベルの情報が検出されると、ランクが“B”の情報が急旋回または急制動中に発生すると、文字データに変換(または文字データのまま)してデイスプレイ8に表示するようにしている。
【0072】
尚、上記第1変形例では、ランク“B”の車両情報に対して音声情報で提供すること抑制していたが、急制動や急旋回状態ではランク“A”の音声情報もドライバにわずらわしいときがあり、そこで、ランク“A”の音声情報も表示されるだけのように、第1変形例をさらに変形することも可能である。
〈第2実施形態〉…走行環境の考慮
上述の第1実施形態は、情報提供のタイミングを、特に2つの情報が競合した場合における情報提供のタイミングを、緊急度レベルLVL(第11図)という概念を導入することにより決定していた。このレベルLVLは第11図に示すように優先度ランクRKと走行状態STATとによって決定される。
【0073】
以下に提案する第2実施形態は、優先順位の上下関係と走行環境とによって競合を調停するものである。このために、本第2実施形態では、第1実施形態の第18図のフローチャートの代わりに第31図のフローチャートを、第11図のテーブルの代わりに走行環境ENVを考慮した第29図のテーブルを用いる。その他のフローチャート及びテーブルは第1実施形態のものをそのまま援用する。
【0074】
第29図は、対象の情報種類KNDに対するそのときの走行環境ENVを考慮した優先順位決定テーブルを示す。本第2実施形態における優先順位は優先順位決定後における制御アクションの分類を示すので、第1実施形態の「レベルLVL」と区別する意味で、便宜上「分類CL」と呼ぶこととする。本第2実施形態では、走行環境として、山岳路と自宅近傍と渋滞路の3種類の走行環境を設定している。第29図に従えば、同じ種類の情報でも、走行環境が異なればドライバにとって重要度が異なるものであるから、その変化に応じて優先順位、即ち、分類CLの値も異なるものとなる。分類CLの値は重要度が高いほど小さい値を割り当てた。例えば、NAVI情報は、渋滞路では重要度は高い(値は“2”)が、山岳路では重要度は中程度(値は“3”)であり、自宅近傍では地理に知悉しているので重要度は低く(値は“4”)なる。尚、この第2実施形態では、分類値CLが“1”である情報は常に出力されるものとし、“4”の情報は出力対象外とされている。
【0075】
第31図は、第1実施形態の第18図のフローチャートに代わる第2実施形態のための制御手順を示す。即ち、第31図の制御手順を実行するときは、第10図のメインルーチンルーチンを実行中に、1つの情報xがキューイングされていることを発見してステップS500の「情報提供制御」サブルーチン(詳細は第17図)を起動し、「情報提供制御」サブルーチン(第17図)を実行してステップS520を実行することが起動された場合である。
【0076】
即ち、第31図のステップS700を実行する時点では、情報提供すべき情報の番号xはレジスタnに移管されている。そこで、ステップS700では、情報nを処理するに際して、既に情報提供中(便宜上、第1実施形態と同じように、出力中と呼ぶ)の情報xがあるか否かを調べる。
出力中の情報xが存在しない(競合する情報が存在しない)のであれば、当該キューイングされている情報nは出力されてもよいので、ステップS736に進み情報nを出力キューに入れる、即ち、フラグOUTQnを“1”にセットする。
【0077】
出力中の情報xが存在する場合には、ステップS702でその引数xをレジスタkに移管し、ステップS703の「例外情報処理」を実行する。この例外情報の処理の詳細は第32図に示される。
第32図のステップS800において、出力中情報kの種類KNDが緊急情報(KND=1)であるか否かを調べる。出力中情報が緊急情報であれば、その情報の出力を終了するのを待つべきであるから、制御はステップS800から元のルーチンのステップS704にリターンするのではなく、第31図のルーチンの最終ステップ(リターンステップ)にEXITする、即ち、第17図のステップS520を終了する。かくして、情報の競合があっても、出力中情報が緊急情報であれば、その緊急情報の出力が確保される。尚、緊急情報kの出力中に、緊急情報nが入力された場合には、第32図の制御手順に従えば、緊急情報kの出力が終了した後に緊急情報nが出力される。
【0078】
ステップS800で、出力中情報kが緊急情報でないと判断されたときには、ステップS802で、入力された情報nの分類クラスCLが“4”であるか否かを調べる。前述したように、この第2実施形態で定義した走行環境では、分類値CL=4であるような情報は処理対象外としている。そこで、ステップS804に進み、その情報nのキューフラグIQnをリセットし、併せてデータもクリアする。そして、情報の処理が終了したものとして、第31図のルーチンの最終ステップ(リターンステップ)にEXITする、即ち、第17図のステップS520を終了する。
【0079】
一方、出力中情報kが緊急情報でもなく、入力情報nがCL=4でもない場合には、この入力情報nを処理するために、第31図のステップS704にリターンする。
ステップS704で、その出力中情報kと出力予定の情報n同士の優先度ランクRKCを調べる。
【0080】
出力中情報kのランク値RKCkが出力予定の情報nのランク値RKCnと同等かまたは下位(ステップS704でYES)の時は、その下位ランクの出力中情報はその提供を中止するためにステップS706に進み、出力中フラグOUTPkをリセットする。そして、ステップS708で第29図のテーブルに従って、出力中であった情報のkについて環境分類CLを決定する。分類値CLの値によって制御は異なる。尚、緊急情報(CL=1)及びCL=4の情報はステップS703のステップにおいて既に処理されている。
【0081】
出力を停止された情報kの分類値CLが“2”の場合は、ステップS710において当該情報kのキューフラグIQkを“1”にセットする。これは、分類値CL=2の情報kが現在の走行環境下では(CL=2に比して)出力する重要性がCL=3の情報に比して比較的高い、ことに鑑みて、後に再提供されるようにスケジュールするためである。ステップS712では、出力を停止された情報kに代わって情報nを直ちに出力するために、フラグOUTQ nを“1”にセットする。
【0082】
第33図は、ステップS706〜ステップS712の対象となる競合する2つの情報kとnの具体例を示す。この場合、ランク“C”且つ分類“3”の情報kが先に出力されているところに、ランク“B”且つ分類“2”の情報nが入力された場合において、情報kの出力が中断されて情報nの出力が取って代わり、その後に情報kの出力が再開されている。
【0083】
ステップS708で分類値が“3”と判断された場合には、すち、出力中情報kのランク値は入力情報nのランク値よりも低いものの、出力中情報kの分類値が“3”の場合には、その出力中情報kをクリアするために、ステップS714で、当該出力中情報kのキューフラグIQkをリセットし、ステップS716でデータを消去し、ステップS718で情報がクリアされた旨をデイスプレイ8に表示する。また、ステップS719では、入力情報nを出力キューに入れるために、フラグOUTQnを“1”にセットする。
【0084】
競合する2つの情報の内、既に出力中の情報kの優先度が入力情報nの優先度よりも高い場合(ステップS704でNO)には、ステップS720で、入力情報nの環境分類値CLを調べる。
入力情報nの分類値CLが“3”の場合について説明する。この場合は、入力情報nの重要度は現在の走行環境では比較的低いことを意味する。従って、ランク値RKの高い現在出力中の情報kの出力を停止する必要性は全くない。反対に、出力中情報kのランク値が入力情報nのそれよりも高いことと入力情報nの重要度が現在の走行環境では比較的低いことに鑑みて、入力情報nの提供を行なわないようにした方が、後に発生するかも知れないより重要度の高い情報に備える意味からも好ましい。そこで、ステップS722で当該入力情報nのキューフラグIQnをリセットし、ステップS724でデータを削除し、ステップS726でその旨を表示する。第34図に例を示す。
【0085】
入力情報nの分類値CLが“2”の場合について説明する。この場合は、出力中情報kのランクRKが入力情報nのランクよりも高いので、出力中情報k必要はないが、入力情報nの重要度は現在の走行環境を鑑みれば比較的高いので、入力情報nを除去するまでもない。従って、この場合には、ステップS720からもとのルーチンにリターンして、入力情報nの出力を出力中情報kの終了を待ってから、或いは走行環境の変化を待ってから行うようにする。
【0086】
第34図に例を示す。また、第30図に第2実施形態のロジックを示す。尚、第2実施形態においては、走行環境の例として第29図に3つ挙げたが、そのほかに、
1:走行路(平坦路、山岳路、高速道路、道幅(狭い/広い)、有料道路、渋滞路)、
2:走行場所(自宅近傍、市街地、海の近く、観光地、スキー場近傍)
3:天候(雨天、雪、外気温)
に応じてマップを作成してもよい。
〈第2実施形態の効果〉
以上説明した第2実施形態によれば以下の効果が得られる。即ち、
1:例外情報出力処理(第31図のステップS703,第32図)を行うことにより、特殊な情報(常に重要度の高い例えば緊急情報や、常に重要度の低い情報(音楽タイトルなど))を制御の対象外とすることにより、制御ロジックを簡略化することができる。
2:優先度(RKC)と走行環境ENVを考慮して、競合した情報の出力順序を決定(ステップS704)する。
【0087】
出力中情報kの優先度ランクRKが低い場合、出力中情報の出力が停止される場合があるが、その停止された情報が再開されるか否かは走行環境によって決定する。即ち、2つの情報が競合した場合において、出力中情報の出力を停止するか否かは、競合情報間の優先度に応じて決定す(ステップS704)るが、出力を停止された情報の再出力は、その情報の走行環境を考慮した重要性(分類値CL)によって決定される(ステップS708,ステップS710)べきであるとした。再開されない場合にはその情報はクリア(ステップS714)される。
【0088】
一方、出力中情報kのランクが高い(ステップS720)場合には、入力情報nの情報を提供するか否かを、その入力情報nの走行環境を考慮した重要度(CL)によって決定する。即ち、ランクの高い出力中情報kの出力状態は維持されるものの、ランクの低い入力情報nは、その入力情報nの環境に対する重要度に応じて制御される(ステップS722〜ステップS724)。
【0089】
上記第1実施形態及び第2実施形態では、優先度ランクRKなる概念を導入して、優先順位を大まかに分類したが、ランクを細分類し、1ランク=1順位と設定しても本発明は成立する。ランクを再設定することは第5図の表示画面を用いて簡単に行うことができる。
〈第2実施形態の変形〉…第2変形例
この第2変形例は、第2実施形態の優先度(PR)と分類値(CL)とを用いる制御手法を、走行状態(車速,旋回速度,加減速状態,車線変更,右左折,前進/後退等)を考慮して情報提供を制御する手法(第1実施形態の手法)に応用したものである。
【0090】
この第2変形例の制御は、第2実施形態の制御(第29図〜第34図)を援用することができる。この場合、第2実施形態1変形例に対して、第2変形例の制御ロジックと同様のロジック変更を加えるものである。このために、第69図のテーブルを、第2実施形態のテーブル(第29図)に替えて制御に用いる。第2変形例の制御は、このテーブルを、援用する。
〈第3実施形態〉…走行モードの考慮
この第3実施形態は、複数の情報が発生した場合に、走行モードに応じて情報提供の要否、さらには情報提供の優先順位を決定するものである。
【0091】
第35図〜第47図は本発明の第3実施形態の制御手順に関わるフローチャート及びその制御手順に用いられる各種テーブルなどを示す。
第3実施形態は、走行モードの違いに応じて、即ち一般走行路(中低速走行)と高速走行路という走行モードの相違に応じて、情報提供の要否、さらには情報提供の優先順位を決定する。これら2つのモードにおいて、第35図に示すように、各種情報に対して、走行モードに応じた優先順位PRと分類CLが与えられている。即ち、走行モードが異なれば、同じ種類の情報でも異なる優先順位PRと異なる分類CLとが与えられている。例えば、NAVI情報は、一般走行モードではPR=3、CL=2であるが、高速走行モードではPR=6、CL=3である。高速道路では道に迷うことが少ないから、NAVI情報は必要性に乏しく、逆にVICS情報の方が必要性が高い。これらの設定は、第1実施形態と同じようにユーザがその設定を変更することができる。
【0092】
第35図のテーブルにおいて、優先順位の欄で“x”とされているものは、制御対象から外されていることを示す。そのような情報に対しては、分類値=4が与えられている。また、緊急情報については、常に最高の優先順位(=1)と分類(=1)が与えられている。従って、緊急情報と世帯障害の情報は、第2実施形態と同じように、「例外情報」として扱われることになる(第47図を参照)。
【0093】
第3実施形態の制御手順を簡単に説明する。
第37図は第3実施形態の制御手順のメインルーチンを示す。その構成及び動作は第1実施形態の第10図のフローチャートと実質的に同じであるので説明は省略する。
第3実施形態の第38図は第1実施形態の第17図に相当し、第39図は第14図に相当し、第40図は第15図に相当し、第41図は第16図に相当し、第43図は第19図に相当し、第44図は第20図に相当し、第45図は第23図に相当し、第46図は第22図に相当し、第42図は第18図に相当し、第47図は第2実施形態の第32図に相当する。尚、第3実施形態の連続出力の制限の定義テーブルについては第1実施形態のそれと全く同じであるので、第1実施形態のそれ(第21図)を援用するものとする。
【0094】
第3実施形態の情報提供制御は第38図によって与えられる。第3実施形態では、情報にランク値を与えていた第1変形例と異なり、走行モード毎に異なる優先順位を与えているので、例外情報処理を第38図の情報提供制御で行っている。この例外情報処理制御はステップS1808で行われるものの、その内容は第2実施形態(第32図)と実質的に同じであり、即ち、緊急情報(分類値CL=1)と分類値CL=4の情報を特別に処理するものである。この例外情報処理のために、第1実施形態の時と同じように、「優先度に応じた処理」において、分類値CLが“2”及び“3”のみの情報を処理の対象とすればよいことになる。
【0095】
第3実施形態の第42図に示された処理は、優先順位(PR)と走行モードとを考慮して、競合した情報の出力順序を決定(ステップS1824)する。即ち、各種走行モードに即した、情報の出力順及び情報提供の要否が決定される。
情報の出力順は原則的には第2実施形態のそれと同じである。特に、情報提供の要否の決定ロジックについて言及すれば、出力中情報kの優先順位PRが低い場合、その出力中情報の出力が停止される場合があるが、その停止された情報が再開されるか否かは走行モードによって決定する。即ち、2つの情報が競合した場合において、出力中情報の出力を停止するか否かは、競合情報間の優先度に応じて決定する(ステップS1824)が、出力を停止された情報の再出力は、その情報の走行モードを考慮した重要性(分類値CL)によって決定される(ステップS1828,ステップS1820)べきであるとした。再開されない場合にはその情報はクリア(ステップS1824)される。
【0096】
一方、出力中情報kの優先順位が高い(ステップS1832)場合には、入力情報nの情報を提供するか否かを、その入力情報nの走行モードを考慮した重要度(CL)によって決定する。即ち、優先順位の高い出力中情報kの出力状態は維持されるものの、優先順位の低い入力情報nは、その入力情報nの走行モードに対する重要度に応じて制御される(ステップS1834〜ステップS1836)。
【0097】
第36図に、第42図に示した制御手順の決定論理の概略をまとめて示す。この論理は第2実施形態と実質的に同じである。
〈第3実施形態の変形例〉…第3変形例(時間帯の考慮)
この変形例は、情報提供の順序と要否の決定を、運転を行っている時間帯に応じて決めるものである。
【0098】
第48図に、第3実施形態の第35図と同じ、優先順位PRと分類値CLの定義テーブルを示す。第3実施形態の時と同じように、情報の種類毎に、優先順位PRと分類値CLが決められており(変更可能)、また、同じ種類の情報でも、時間帯の相違によって異なる値の優先順位PRと分類値CLが与えられているのは第3実施形態と同じである。
【0099】
第3変形例では、時間帯の指定を、第48図に示すように、名称(例えば、「食事」と「通勤」)で指定する手法と、具体的な時刻で指定する手法(第49図)を例示する。第3変形例のシステムの構成及び制御手順は第3実施形態のそれと実質的に同じでよい。この変形例によっても第3実施形態と同じ効果を期待できる。
〈第3実施形態の変形例〉…第4変形例
(時間帯の考慮)
この第4変形例は、上記第3変形例の情報提供の要否判定をさらに改良したものである。即ち、第3変形例では、第48図または第49図に示したように、情報提供の要否判定の対象から除外されている情報(同図において“x”でしめされている)はシステムによって前もって決められており、その後にユーザがデイスプレイを介して変更するというものであった。しかしながら、要否判定の対象である情報は時間帯に応じて予め決まっている、換言すれば、時間帯によって異なっている。そこで、この第4変形例では、ユーザが定義した時間帯に応じて前もって決めておいた要否判定対象除外情報をテーブル(第50図)として記憶することとする。
【0100】
第51図はこの第4変形例にかかる制御手順の、第3実施形態の制御手順に対する変更部分を示すものであり、この制御手順が第3実施形態のステップS1806とステップS1808の間に挿入されることによって、第4変形例の制御手順は完成する。
即ち、ステップS1806を実行してから、走行時刻(現在時刻)を読み取り、その時刻から走行時間帯を判断する。判断ロジックの一例を第52図に示す。このロジックにより、現在の走行時間帯をユーザの手を煩わすことなく判定することができる。時間帯が判定されたならば、第50図のロジックを用いて、情報提供要否の対象から除外すべき情報を見出す。同図において、丸印の付されていないものが除外対象である。
【0101】
除外対象が決定されたならば、ステップS1808の「例外情報処理」により、対象外の情報を除去する。
〈第4実施形態〉…走行目的の考慮
第1実施形態は、走行状態(緊急動作、ブレーキ操作、ハンドル操作等)によって、第3実施形態では走行環境(自宅周辺道路や山岳路などの区別)や走行モード(速度の相違による区別)によって、情報提供の要否及び順序を決定していた。
【0102】
第4実施形態は、走行目的に応じて情報提供の要否及び順序を決定する。
第53図は、走行目的に応じて、情報提供の要否及び順序の分類を決定するロジックを表すテーブルである。第4実施形態では、走行目的の例として、通勤、旅行やレジャー、買い物を挙げる。
第4実施形態のシステムの構成及び制御手順は第3実施形態のそれと実質的に同じでよい。第4実施形態によっても、第1実施形態〜第3実施形態と同じ効果を期待できる。
〈第4実施形態の変形〉…第5変形例(走行目的の推定)
第4実施形態のシステムでは、走行目的をユーザであるドライバがデイスプレイの画面を介して設定するものであったが、この変形例は、走行目的をシステムが推定するものである。
【0103】
第5変形例のシステムが推定する走行目的は、通勤、旅行/レジャー、営業活動、買い物、NAVIによる誘導走行の5種類とする。
第54図に第5変形例にかかる制御手順の、第4実施形態の制御手順に対する変更部分を示すものであり、この制御手順が第4実施形態のステップS1806とステップS1808の間に挿入されることによって、第5変形例の制御手順は完成する。
【0104】
即ち、ステップS1806を実行してから、走行推定を行う。この推定ロジックは、一例として、
平日で午前7時〜9時…通勤
休日で自宅より半径50Km以内…買い物、
休日で自宅より半径50Km以上…旅行/レジャー、
と判定する。平日か休日かはシステムが有するクロックにより、距離はNAVIシステムが有する距離情報に基づいて判断する。
【0105】
尚、目的の推定をスイッチなどによって行ってもよい。次ぎに、マップ(第55図)から、情報提供要否の対象から除外すべき情報を見出す。同図において、丸印の付されていないものが除外対象である。
除外対象が決定されたならば、ステップS1808の「例外情報の処理」により対象外の情報を除去する。
〈第5実施形態〉…心理状態の考慮
第5実施形態は、走行条件に応じて情報提供の要否の判断及び提供の順序を決定するという点では第1実施形態〜第4実施形態と同じであり、即ち、この第5実施形態は、ドライバの心理状態に応じて情報提供の要否の判断及び提供の順序を決定する。
【0106】
第5実施形態の制御は第3実施形態の制御を援用する。第56図は、各種の情報の重要度(優先順位PR及び重要度分類CL)が、心理状態に応じてどのように変化するかを示すテーブルである。このテーブルを、第3実施形態の制御手順が走行状態に応じた重要度テーブル(第35図)を用いるのを類似の手法で用いる。即ち、第5実施形態の制御のためには、第38図のフローチャートのステップS1806を、第58図に示すように、ステップS1806‘に変更する。ステップS1806’は第56図のテーブルを参照する。尚、第5実施形態では、心理状態を、システムが、連続走行時間、走行時間帯、ブレーキの踏む回数、走行速度などから判断する。
【0107】
ステップS1806’を実行すると、第5実施形態の制御は、第3実施形態と同じように第38図のステップS1808の「例外情報処理」を実行する。この処理では、緊急情報は例外的に常に提供されるように処理し、第56図のテーブルでxとマークされた情報については、その時点で判断された心理状態に応じて「制御対象外情報」として判断され、情報提供対象情報から除外される。
【0108】
また、第56図の優先順位PRや分類値CLは、第5実施形態のための「優先度に応じた処理」(第42図参照)において用いられる。
この第5実施形態によっても、第3実施形態,第4実施形態と同じ効果が得られる。
〈第5実施形態の変形例〉…第6変形例
第5実施形態における制御対象の情報の区別を、第56図のマップでは3種類(疲労状態、緊張状態、平常状態)に分類した上で、x印で示していたが、この変形例では、さらに細かく、例えば第57図のように分類することを提案する。〈第6実施形態〉…緊急情報のユーザによる指定
第3実施形態の制御においては、所謂「緊急情報」はステップS1808の「例外情報処理」(第38図)によって例外的に処理され、そのために確実に速やかにドライバに提供されるものであった。しかしながら、第3実施形態の「緊急情報」はシステムが予め決めておいたものである。例えば、トンネル情報、地震情報、車両情報(故障警報、車間距離警報、パンク警報等)、交通情報(事故情報、交通規制情報)などである。そのために「緊急情報」は固定的であった。この第6実施形態は「緊急情報」をユーザが指定できる点に特徴がある。
【0109】
第59図は、その指定のためのユーザインタフェースを示す。即ち、ドライバがデイスプレイ8上の画面(第59図)において、「情報設定の変更」を選択すると、第60図のような画面が現れて、現在「緊急情報」として選択されている情報が黒丸で、緊急情報として選択され得る候補が白丸で表示される。ユーザは、「緊急情報」に加えたいときには、その情報の○部分を操作装置で選択し、「緊急情報」から除外したいときには、その情報の黒丸部分を操作装置で選択する。この選択により、○の白黒は反転して、「緊急情報」に加えられたこと或いは除外されたことがユーザによって確認される。
【0110】
第6実施形態の制御手順の大部分は第3実施形態の制御手順を援用する。「緊急情報」として登録された情報には、情報種類としてKND=1が登録される。このKND=1はステップS1806で読み取られて、ステップS1808で例外的に取り扱われて、早く確実にドライバに提供される。尚、この第6実施形態は、本来の最優先情報としての「緊急情報」の他に、ユーザが指定する情報を「緊急情報」として扱うものであるが、第6実施形態の変形として、たとえば、第77図に示すように、本来の緊急情報と、擬制的に緊急情報とされた情報との優先順位の差が所定値(例えば2)未満のもののみを、擬制的に緊急情報として扱う制御も提案することができる。
〈第7実施形態〉…優先順位の自動変更
第1実施形態〜第6実施形態では優先順位等(優先順位PR及びランクRK)は予め決められており、その値を変更するときは、変更用のユーザインタフェース画面を表示させて、その値を変更するようにしていた。換言すれば、優先順位は実質的に半固定である。半固定にしたのは、優先順位の値をかえることはロジックの変更に繋がるものであり、ユーザにロジックの変化を配慮させることは好ましくないからである。しかしながら、優先順位等を固定的にしておくことは、走行条件が種々に変化する現今の交通事情では好ましくない。
【0111】
第7実施形態は、システムが、走行条件の変化を勘案しながら、優先順位などを、適正なものと前もって決められた範囲内で自動的に変更するものである。
第61図は、第7実施形態において設けられた優先順位などの変更ロジックの例を示す。
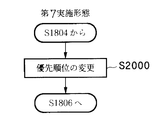
第7実施形態の制御は第3実施形態の制御の大部分を援用する。第62図に、第3実施形態の制御手順に対する変更部分を示す。この変更は、第3実施形態のステップS1804(第38図)とステップS1806(第38図)の間にステップS2000を追加して修正される。このような制御手順の変更により、第7実施形態のシステムは、ステップS2000で、ステップS1804(第38図)で読み取った各種車両データなどから、第61図に示したルールを満足する優先順位の補正を行う。ステップS1806では、ステップS200で補正された優先順位PR等の他に、分類値CLや回数制限値LMT等を読み取り、この補正値を用いて、ステップS1808で「優先度に応じた処理」ルーチンを実行する。
【0112】
第61図の補正条件としては、車両に突発的に故障が発生した場合における車両故障情報の順位を上げる補正、或いは、高速道路を走行中にVICS情報の優先順位を上げる補正、或いは、山岳路走行中(気圧計によって検知できる)、或いは雨天中(ワイパの動作によって検知できる)には、天候情報の優先度を挙げる補正、或いは、ノイズレベルの高い情報或いは入力してから時間の多く経過した情報の優先順位を下げる補正、走行方向と異なる方向のVICS情報の順位を下げる補正など。
【0113】
かくして、第7実施形態によって、優先順位がよりきめ細かく決定されるので、現在の走行条件とその情報の性質に即して最適な情報提供がなされる。
第7実施形態の優先順位の変更の手法は、第3実施形態のみならず、第1実施形態〜第6実施形態にも適用できるものである。
優先順位の自動変更は、経路誘導を実際に行っているときにも有効である。即ち、経路誘導を行っているときには、ナビゲーションシステムのナビゲーションコントローラは、目標値点までに至る複数の誘導地点において、誘導地点に近接する毎に、その旨をドライバに報知するようになっている。この情報によりドライバは自分が目標地点に向かって正しく進行していることを確認できる。換言すれば、経路誘導を行っているということは、経路誘導地点近傍ではある程度の情報が与えられるものとドライバは期待しており、反対に、誘導地点以外の地域では余分な情報を与えられることに不快感を感じる。
【0114】
そこで、第7実施形態のナビゲーションコントローラ17は、第78図に示す制御手順に従って、集中制御ユニット2に、NAVI情報を優先順位を付加して送る。この時、ナビゲーションコントローラ17は、第78図に示すように、経路誘導制御が稼働していることを確認し、経路誘導制御がなされているときに経路誘導地点に近接(所定の距離の半径の円内)にあるときには、NAVI情報の優先順位を上げる。
【0115】
一方、集中制御ユニット2は、NAVI情報以外のメディアからの情報に対しては、経路誘導制御が稼働していて経路誘導地点に近接しているときには、たとえばニュース情報などの優先順位を下げるようにしてもよい。こうすることにより、経路誘導地点近傍では、NAVI情報が優先され、反対にNAVI情報以外の優先順位が相対的に下げられて、ドライバにとって真に必要な情報がドライバに提供される。
〈第7実施形態の変形〉…陳腐データの削除(第7変形例)
車両速度には自ずと限界があるために、交通情報などのように、短い距離の間に同じ情報が何度も不必要に入力されることがある。このような情報が何度も提供されることは不快感を招く。
【0116】
そこで、この変形例は、過去に入力された情報と同じ内容の情報については、その優先順位を下げことにより、陳腐データ情報の繰り返し提供を防止するとういうものである。この変形例は、内容が同じか否かの判定が比較的容易な、キャラクタデータ形式で送られてくる情報に対して特に効果がある。陳腐内容のキャラクタデータ情報の優先順位を下げることにより、その情報が提供(表示もしくは音声出力)される確率が相対的に下がるからである。また、マルチメディアナビゲーションシステムでは、キャラクタデータ情報でも音声データに変換されて出力されるので、陳腐情報を表示のみならず音声出力しないようにすることからも、ドライバの不快感を減少させる。
【0117】
第7変形例も第3実施形態の制御手順を一部援用する。即ち、第38図の制御手順のステップS1804とステップS1806の間に第64図の制御手順を追加して修正する。また、この第4変形例では第63図に示すような記録領域を確保する。この記憶領域では、キャラクタデータの入力時刻と、同じ内容と判断された回数と、そのデータ内容とを記憶する。
【0118】
第64図のステップS2002で入力された情報がキャラクタデータか否かをチェックする。キャラクタデータでなければ陳腐データか否かの判断対象を行わない。キャラクタデータの場合は、ステップS2004において、第63図の記憶領域中に入力された情報データと同じものがあるか否かを探索する。同じ内容のものがなければ、その情報データを第63図の領域に記憶する。同じ内容のものがあればステップS2008で時間差を計算する。この時間差が所定の閾値Δよりも小さければ、短い時間内に同じ内容の情報を受け取ったことになるのでステップS2012でその情報の優先順位を下げる。一方、時間差がΔよりも大きければ、前回データを入力してからかなりの時間を経過しているので、そのデータを第63図の記憶領域から消去する。
【0119】
この第4変形例の手法によっても、同じ陳腐内容の情報が繰り返しドライバに提供されるのが防止される。
尚、同じ内容のデータが2回目に入力された場合には、そのデータをデイスプレイ8に表示し、3回目以降において同じ内容のデータが来た場合には、そのデータを消去するようにしてもよい。
【0120】
〈第8実施形態〉…データ内容による優先的処理
第8実施形態は、文字放送からの情報について、特定のキーワードを有するデータ情報のみを優先的にユーザに提供するものである。即ち、文字放送は文字であるが故に、その情報を表示に留めていれば、ユーザにデイスプレイの注視を強いる点と、逆に、文字データ情報であるが故に特定のキーワードを探索することが比較的容易にできる点に着目したものである。
【0121】
第8実施形態のナビゲーションシステムは、第65図に示すようなユーザインタフェースをデイスプレイ8上の画面に表示して、通常放送モードと文字放送モードの選択をユーザに許す。文字放送受信モードを選択すると、文字放送情報データ中に探索すべきキーワードの入力が許される。さらに、文字放送データ中にキーワードが見つからないような情報を、消去するのか(第65図で“する”を選択)、消去せずに文字として表示する(“しない”を選択)を選択することが許される。
【0122】
第8実施形態の制御手順は、第3実施形態の制御手順を援用することにより達成される。第38図のフローチャートの一部(ステップS1804とステップS1806の間)を第66図のように変更する。
情報の入力があると、ステップS2100で入力情報が文字放送データか否かを判別する。ステップS2101では、文字放送モードがセットされているか否かを判断する。このモードがセットされていればステップS2102でキーワードがセットされているかを判断する。キーワードがセットされていればステップS2104でその受信データ中にキーワードを探索する。
【0123】
キーワードを含むような文字放送データが見つかれば、ステップS2110でその情報を音声データに変換する。この音声データに変換された情報は、第3実施形態の制御手順に従って他の情報と同じように処理される。見つからなかった情報は前述の設定スイッチ(消去を行う、行わないの設定)に従って、表示データとして処理するか、或いは消去する。
【0124】
尚、キーワードとしては、文字放送が、現在、「スポーツ情報」と「天気予報」と「イベント情報」にジャンルわけされているので、それらのジャンル中の特定のキーワード、例えば、自分がひいきにしているチーム名、選手名、或いは、天気予報を聞きたい地域の名称、イベントの名称等を入力する。
この第8実施形態の制御手順によれば、ドライバが興味があるもの(キーワードが一致したもの)のみが、認識し理解しやすい音声情報の形式でドライバに伝達される。一致がとれないような情報はドライバに不快を与えないように消去され或いは煩わしさを与えないようにデイスプレイ8に表示される。
〈第9実施形態〉…情報間の提供間隔の制御
音声情報が頻繁に発生しているときには音声情報が再生される時間間隔もドライバには気になる要素である。この第9実施形態は、情報提供間隔を制御する。より少な目の情報提供の方がドライバに好ましい走行環境、走行状態、走行時間、心理状態では、情報提供間隔をより長めに設定することにより、より多い目の情報提供の方がドライバに好ましい走行環境、走行状態、走行時間、心理状態では情報提供間隔をより短めに設定することにより、単位時間当たりの最適な情報の提供量を制御するものである。
【0125】
この第9実施形態の「情報間の提供間隔の制御」は前述の第1実施形態〜第8実施形態の全てのナビゲーションシステムに適用可能である。そこで、第1実施形態〜第8実施形態の全てのナビゲーションシステムに適用可能な「情報提供間隔の制御」の原理を第70図に基づいて説明する。
第70図において、時間幅Tは、そのときの条件下におけるドライバにとって最適な情報間の時間間隔(最小値)である。時間幅Tの経時開始時点は前回の情報の出力終了時刻(TMED)である。従って、
TMED+T
の時刻以降において次回の情報を提供してもドライバに不快感を与えることはない。
【0126】
第71A図〜第71F図に、提供時間間隔Tの最小値を決定する原理を説明する。第71A図〜第71F図によると、
提供時間間隔T=t0×t1×t2×t3×t4×t5
で定義される。ここで、時間幅t0は、第71A図に示すように、車速によって決まる提供時間間隔の基本値である。
【0127】
原則的には車速があがるほど時間間隔は短くすべきである。しかし、高速道路のような道路において安定走行を行っているときは、車速が高くとも、より多い量の情報を提供しても問題はない。そこで、第71A図に示すように、車速80Km/h以上ではt0の値を小さくしている。
t1,t2,t3,t4,t5は夫々補正計数である。
【0128】
第71B図に従えば、補正計数t1は渋滞の程度がひどくなるほど値を大きく設定している。渋滞がひどいときには情報提供の量を少なくすべきであるからである。
第71C図に従えば、補正計数t2は道路密度が高いほど値を小さく設定している。道路密度が高い一帯ではより多くの経路誘導情報などを提供する必要があるからである。第71D図に従えば、補正計数t3は提供情報量が多いほど値を小さく設定している。提供情報量が多いときは相対的により多くの情報を提供する必要性が高いからである。第71E図に従えば、補正計数t4はナビゲーションが動作しているときは非動作中の時よりも値を小さく設定している。ナビゲーションを動作させているときはドライバがナビゲーション情報を欲しているからである。第71F図に従えば、補正計数t5は情報提供の制限回数LMT(第21図を参照)が大きいほど値を大きく設定している。第21図から明らかなように、制限回数LMTは、走行状態がドライバに多くの操作を必要とするほど大きな値が設定されているから、制限回数LMTが大きいほどより少な目の情報が好ましいからである。
【0129】
第72図,第73図は、第9実施形態の時間間隔制御を第1実施形態〜第8実施形態のナビゲーションシステムに適用した場合において、必要となる制御手順の変更部分を示す。
第72図,第73図は、夫々、第9実施形態の制御を例えば第1実施形態に適用した場合における、第9実施形態のための「出力」ルーチン(第1実施形態の第19図)及び「出力完了」ルーチン(同第20図)に対応するフローチャートである。
【0130】
第70図で説明したように、先の情報の出力が終了すると、第73図のステップS2210で、遅延時間T(提供間隔)を第71A図〜第71F図に従って計算する。ステップS2212ではタイマに時間幅Tをセットして起動する。
その後に何らかの音声情報(kとする)が発生すると、第1実施形態〜第8実施形態の「情報提供の要否、情報提供の優先順位」の決定制御が行われて、その音声情報kに対して出力キュー(OUTQk=1)が設定される(例えば、第18図のステップS554)。すると、第72図の「出力」ルーチンにおいて、ステップS220で、その音声情報kが緊急警報(KND=1)であるか、または、現在地点がナビゲーションの誘導地点(交叉点など)に近いかを判断する。緊急警報(KND=1)は提供を遅らせるべきでないからである。ナビゲーションの誘導地点近傍では、ドライバはより多くの情報を必要とするからである。
【0131】
音声情報kが緊急警報でもなく、現在地点がナビゲーションの誘導地点の近傍でもない場合には、ステップS2202で、ステップS2212(第73図)でセットしたタイマがタイムアウトしたかを調べる。タイムアウトしていない場合には、まだこの音声情報kを提供するには早すぎるのであるから、ステップS2204でこの音声情報kの出力キューをリセットして、OUTQk=0とする。この情報kのキューをリセットすることにより、この情報kの後で発生するかも知れないより優先度の高い情報が提供されることを確保する。
【0132】
かくして、提供間隔を制御することにより、その時点の走行条件に応じた最適な情報量の音声情報がドライバに提供される。
〈第9実施形態の変形〉…第8変形例
第9実施形態は、先の音声情報の出力が終わる毎にタイマTを起動していたが、この第8変形例は、先の音声情報の出力が始まる度にタイマTを起動するものである。この場合、第74図に示すように、その先の音声情報の提供にかかる時間を計算する必要がある。
〈第10実施形態〉…情報種類別の音質等の使い分け
第10実施形態は、前述の第1実施形態〜第8実施形態のナビゲーションシステムの夫々に適用可能な音声情報の出力形態の改良に関する。
【0133】
第10実施形態は、過度な音声情報がドライバに特に不快感を与えることに鑑みてなされたもので、入力された音声情報を、その時点における状態に応じて、音質を変えて或いは音量を変えて出力するものである。
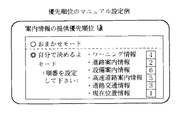
第75図は、音声情報の出力の態様を設定するユーザインタフェースの表示画面の一例である。この第10実施形態では、第76図に示すように、「警告情報」,「進路案内情報」,「道路交通情報」,「設備案内情報」,「高速道路案内情報」,「現在位置情報」,「走行環境」,「走行時間」,「走行時間帯」,「走行地域」に応じて、音質、音量を異ならせている。異ならせ方は、総じて、ドライバに注意を喚起するような種類の情報に関しては緊張感のある声、指示口調の声に設定し、逆にドライバに緊張感を与えるべきでないような走行シーンにおいては、例えば、「穏やか」な女声による声で案内口調で発生するようにしている。
【0134】
本実施形態のシステムの集中制御ユニット2は、音声情報の文字コードを、男性と女性とのどちらの音声でも発声できる音声合成データを記憶するROMを有している。また、文法ルールを記憶するROMを有して、口調を「指示調」と「案内調」に変更することもできる。即ち、第10実施形態の制御を例えば第1実施形態にインストールする場合には、上記音声データの変換制御は第19図の「出力」ルーチンにおいてなされる。
〈第11実施形態〉…出力先メディアの使い分け
本ナビゲーションシステムは、マルチメディア情報のソースとして各種メディアを有するほかに、ヘッドアップデイスプレイや通常のデイスプレイ8、さらには、音声出力チャンネル、等の各種手段(提供手段)を有している。
【0135】
第11実施形態は、第1実施形態〜第10実施形態は、情報を、その提供の適否をまたは提供の優先順情報を考慮することにより、音声情報のドライバへの提供を規制するものであったが、この実施形態は、出力先のメディアを使い分けることによって、結果として、情報提供の規制を行うものである。
第82図は、走行状態や条件によって決定されるその時点の「緊急度」と、その情報自体が有している「優先順位ランクRK」(第1実施形態などのランクと同じである)とによって、音声情報の出力先を決定する論理テーブル(音声情報出力先決定テーブル」)を示す。第11実施形態では、この決定論理をユーザが選択できる点にも特徴がある。第81図はユーザが決定論理に関与可能な範囲を定義するテーブル(「メニュー設定許可定義テーブル」と呼ぶ)である。
【0136】
第81図のメニュー設定許可定義テーブルにおいて、ユーザが定義できる領域を、便宜上、網掛けで定義不可の領域と区別して示す。
ここで、第11実施形態における「緊急度」について説明する。
この第11実施形態において、「緊急度」は他の実施形態と同様に、走行状態や走行条件によって、即ち、「情報」自体からは独立して存在する事象に基づいて決定される「情報」の緊急性を表す指標である。本実施形態では、緊急度を第83図のテーブルのように定義する。緊急度の値が小さいほど緊急性が高いとし、大きいほど低いと決める。尚、第83図の状態の多くは第2図に示した各種センサによって判断することができる。第1行目の「道路曲率が大きいとの予想」はNAVIコントローラから得られる情報、たとえば、次ぎはカーブに接近するとの情報に基づいて判断することができる。
【0137】
第82図のテーブルにおいて、×は情報提供がなされないことを示す。第83図の「出力先決定テーブル」の特徴は、情報自体の緊急度であるランクRKの値が低いほど且つ走行条件としての緊急度(テーブルの縦軸)が高いほど、そのような情報の提供の必要性は低くなるから、音声情報としてもデイスプレイにも表示されないようにしている。たとえば、ランク=Eで緊急度=1の時は出力はされない。また、情報自体のランクRK値が高いほど且つ走行条件としての緊急度が低いほど、その情報を提供することの意義が増すから、そのような情報の提供先の選択肢が広がっている。たとえば、ランク=AまたはBで緊急度=4の時はその情報は音声情報としてまたはデイスプレイ(デイスプレイ8及びヘッドアップデイスプレイを含む)に出力され得る。
【0138】
かくして、第11実施形態により、音声情報の出力先を走行条件に応じて選択する(出力しないことも含む)ことにより、適切なタイミングで適切な情報が過不足なくドライバに伝わる。
〈第12実施形態〉…スイッチによる提供シーケンスの決定
前述の第1実施形態〜第11実施形態のナビゲーションシステムでは、情報の提供の順序は、それら情報の発生順序と情報間の優先順位の上下によって決まっていた。そのために、情報が提供される順序はそれら情報が発生した順序と関係なく、従って予想することは困難である。
【0139】
第12実施形態は、複数の情報が同時に或いは連続的に発生した場合において、ユーザがそれら情報の提供順序を制御できるようにしたものである。第12実施形態の動作を説明する便宜上、同実施形態のナビゲーションシステムは、情報の種類として、「ワーニング情報」「道路案内情報」「設備案内情報」「高速道路情報」「道路交通情報」「現在位置情報」を発生するものとする。これら情報はドライバにとっての「案内情報」となる。これらの情報の元となる環境条件の検出は、第85図に例示した各種の環境検出手段によって検出することができる。
【0140】
第85図と第86図の例では、燃料の残が少なくなったとのワーニングが発生した場合には、ドライバが欲しいのは、その警告に対処するための一連の案内情報である。第86図にこれら案内情報の例を示す。換言すれば、案内情報は一連の警告に対処するための一連のシーケンスからなる論理に貫かれていることがユーザには好ましい。即ち、設備への案内情報が警告情報よりも先に出たのでは、何故設備案内情報が提供されたのか理解するのに手間取る。運転中にこの理由を考えることを強いられるのは酷である。第12実施形態のナビゲーションシステムは、各種情報の提供順序を、第87図のユーザインタフェースによって指定するものである。第87図の例では、提供順序は優先順位をユーザが設定することによって決められるようになっている。従って、第12実施形態の提供順序のユーザによる指定は、前述の第1実施形態〜第11実施形態の各種ナビゲーションシステムに適用可能となる。第1実施形態〜第11実施形態の各種ナビゲーションシステムも「優先順位」を用いているからである。第1実施形態〜第11実施形態のナビゲーションシステムでは、優先順位は情報の重要度或いは緊急度によって決められていたが、この第12実施形態では、一連の各種情報の提供シーケンスによって1つのストーリが生まれるように決められるのである。
【0141】
第87図は、案内情報の提供優先順位を設定するユーザインタフェースを示す。図中、「おまかせモード」とはユーザがシステムによって前もって決められていた順序を使用することを意味する。「自分で決めるよ」モードが選択されていると、ユーザが順序を入力できるようになる。第87図の例では、「現在位置情報」→「進路案内情報」→「道路交通情報」→「ワーニング情報」→「高速道路案内情報」→「設備案内情報」の順が設定されている。
【0142】
第12実施例では情報の種類として、「ワーニング情報」「道路案内情報」「設備案内情報」「高速道路情報」「道路交通情報」「現在位置情報」を発生もしくは必要とするが、これら情報の有無は第85図の各種センサを用いることによって、
A:「ワーニング情報」の有無は、ワーニング情報の存在そのものを判断することによって、
B: 「道路案内情報」の有無は経路誘導が行われているか否かによって、
C: 「設備案内情報」の有無は、経路誘導が行われている最中に、車両が目的地或いは経由地の近傍を走行中か否かを判断することによって、
D:「高速道路情報」の有無は、高速道路を走行中か否かによって、
E:「道路交通情報」の有無は、走行道路前方に渋滞または事故などが発生しているか否かを判断することによって、
F:「現在位置情報」の有無は、走行頻度が低い地域を現在走行しているか否かを判断することによって検出することができる。
【0143】
第88図のフローチャートは、第12実施形態の制御手順を示す。この制御手順は優先順位PRを出力するものであるから、第12実施形態の制御を第1実施形態〜第11実施形態の制御に適用するものであるならば、例えば第1実施形態の制御手順のステップS302とステップS304の間に付加することが適当である。
【0144】
即ち、ステップS2502〜ステップS2512において上述のA〜Fの6つの判断を行う。判断結果は6ビットのデータ(ABCDEF=xxxxxx)として表現される。このデータの値が“0”であるならば、即ち、全ビットがオフであるならば、案内情報を出力する必要性が発生していないのであるから、ステップS2520で音声案内を消勢する。
【0145】
一方、6つのビットの内いずれかのビットがONであるならば、即ち、いずれかの案内情報の必要性が発生しているのであるならば、ステップS2514でNOの判断が出るから、ステップS2516で音声要求SW(第80図を参照)が投入されていることを確認して、第87図のユーザ設定に従って優先順位を生成する。
【0146】
第84図は、6ビット( ABCDEF)のパターン(21種類)によって6種類の案内情報の提供順序が21通りの順序に設定されることを示す。例えば、ABCDEF=100011であった場合には、即ち、「ワーニング情報」と「道路交通情報」と「現在位置情報」とが発生している場合には、これら3つの情報には、優先順位の値がそれぞれ、“4”、“3”、“1”と与えられているから、提供順は、第84図に示すように、“1”、“3”、“2”となる。
【0147】
以上のようにして、第12実施形態のナビゲーションシステムでは、ユーザが自分の目的に合致させて情報の提供順序を設定することができる。従って、複数の情報がシーケンス順に提供されるときに、その順序はユーザ自身が組み立てた論理に基づいているので、それら複数の案内情報を理解することが極めて容易になる。即ち、完成度の高い使い易いナビゲーションシステムとなる。
〈第13実施形態〉…曲間のアイドル中に情報を提供
第13実施形態は、音楽番組などは、曲間で音がとぎれてドライバに不快感を与えるのを防止するために、曲間の間隙に情報を提供するものである。
【0148】
第89図は、本実施形態の制御手順のフローチャートである。
ステップS3000で情報の入力キューが発生したことを確認する。そこで、ステップS3002でオーディオが使用中であるかを調べる。使用中でなければステップS3014で情報を提供する。
オーディオが使用中でないのならば、ステップS3004で、発生した情報の優先順位を調べる。
【0149】
ステップS3008〜ステップS3012は、オーディオを一時停止して、その間に情報を提供する制御手順である。即ち、ステップS3008でオーディオを一時停止、ステップS3010で情報提供を行い、ステップS3012でオーディオを再開する。
このオーディオの間隙に情報提供を行う制御は、ステップS3004で高優先順位の情報が発見されたときに、または、ステップS3006で曲間のアイドリングタイム中である。
【0150】
特に、曲間のアイドリング中は、オーディオはビジーであるにも関わらず、そのオーディオを一時停止するので、情報提供を行うことができる。
尚、曲間に提供されるべき情報は、それなりの優先順位を持つ情報でなくてはならない。曲が始まれば、その種類の情報は曲が終わるまで提供されなくなるのであるからである。そこで、前述の実施形態の各種ユーザインタフェース(例えば第12実施形態の第87図のインタフェース)を用いて、オーディオに割り込む情報(ステップS3004でNOとなる情報)と、曲間に挿入される情報(ステップS3004でYESとなる情報)について、予め設定しておくことが重要である。
【0151】
【発明の効果】
以上説明したように、本発明によれば、緊急情報等の重要な情報を適切なタイミングで提供できる。
【図面の簡単な説明】
【図1】 本発明を適用したマルチメディア型ナビゲーションシステムの主要部分を車内から見た図。
【図2】 図1のナビゲーションシステムの接続を示す図。
【図3】 図1,図2に示されたナビゲーションシステムの接続を示す図。
【図4】 図13のナビゲーションシステムに接続された各種メディアの種類を示す図。
【図5】 本発明を適用した実施形態にかかるナビゲーションシステムに用いられるマップの名称、及び各マップににおいて参照される項目を説明する図。
【図6】 本発明の全ての実施形態のナビゲーションシステムにおいて用いられるところの、各種情報に割り当てられる属性情報(優先順位、ランク値、記憶容量等)を管理するためのテーブルを示す図。
【図7】 ナビゲーションシステムにおける情報の記憶領域の分割の態様を示す図。
【図8】 ナビゲーションシステムにおける情報の記憶領域の分割の態様を示す図。
【図9】 本発明の全実施形態のナビゲーションシステムにおいて用いられる入力情報キューテーブルの構成を示す図。
【図10】 第1実施形態にかかるナビゲーションシステムの制御手順のメインルーチンのためのフローチャート。
【図11】 第1実施形態のナビゲーションシステムで用いられる出力タイミングレベルLVLの設定テーブルの構成を示す図。
【図12】 レベルLVLの値に応じた制御動作の態様を示す図。
【図13】 走行状態の相違により、情報提供が許可されるランクの下限RKLMTがどのように変化するかを示すテーブルの図。
【図14】 第1実施形態のナビゲーションシステムの制御手順の「情報入力割り込み」ルーチンのフローチャート。
【図15】 第1実施形態のナビゲーションシステムの制御手順の「マップ補正」ルーチンのフローチャート。
【図16】 第1実施形態のナビゲーションシステムの制御手順の「マップ選択」ルーチンのフローチャート。
【図17】 第1実施形態のナビゲーションシステムの制御手順の「情報提供制御」ルーチンのフローチャート。
【図18】 第1実施形態のナビゲーションシステムの制御手順の「優先度に応じた処理」ルーチンのフローチャート。
【図19】 第1実施形態のナビゲーションシステムの制御手順の「出力」ルーチンのフローチャート。
【図20】 第1実施形態のナビゲーションシステムの制御手順の「出力完了」ルーチンのフローチャート。
【図21】 第1実施形態のナビゲーションシステムの制御で用いられる変数「制限回数LMT」の定義を与えるテーブルの図。
【図22】 第1実施形態のナビゲーションシステムの制御手順の「回数チェック」ルーチンのフローチャート。
【図23】 第1実施形態のナビゲーションシステムの制御手順の「消去」ルーチンのフローチャート。
【図24】 図22の「回数チェックルーチン」の動作の一例を示す図。。
【図25】 第1実施形態のナビゲーションシステムのシステムに用いられる、音声情報が音声として出力されない場合の2つのオプションを指示するスイッチの構成を示す図。
【図26】 第1実施形態のナビゲーションシステムの制御動作の一例を示す図。
【図27】 第1実施形態のナビゲーションシステムの制御動作の一例を示す図。
【図28】 第1実施形態のナビゲーションシステムの制御動作の一例を示す図。
【図29】 本発明の第2実施形態のナビゲーションシステムに用いられる走行環境-アクション分類を定義するテーブルの構成を示す図。
【図30】 本発明の第2実施形態のナビゲーションシステムに用いられる走行環境-アクション分類CLの値により異なる動作を説明する図。
【図31】 第2実施形態のナビゲーションシステムの制御手順の「優先度に応じた処理」ルーチンのフローチャート。
【図32】 第2実施形態のナビゲーションシステムに特有な「例外情報の処理」サブルーチンのフローチャート。
【図33】 第2実施形態のナビゲーションシステムの動作を説明するタイミングチャート。
【図34】 第2実施形態のナビゲーションシステムの動作を説明するタイミングチャート。
【図35】 第3実施形態のナビゲーションシステムに用いられる分類テーブルの構成を示す図。
【図36】 第3実施形態のナビゲーションシステムの動作を説明する図。
【図37】 第3実施形態のナビゲーションシステムの制御手順についてのメインルーチンを示すフローチャート。
【図38】 図37のフローチャート中の「情報提供制御」ルーチンの詳細フローチャート。
【図39】 図37のフローチャート中の「情報入力」ルーチンの詳細フローチャート。
【図40】 第3実施形態のナビゲーションシステムの制御手順の「マップ補正」ルーチンのフローチャート。
【図41】 第3実施形態のナビゲーションシステムの制御手順の「マップ選択」ルーチンのフローチャート。
【図42】 第3実施形態のナビゲーションシステムの制御手順の「優先度に応じた処理」ルーチンのフローチャート。
【図43】 第3実施形態のナビゲーションシステムの制御手順の「出力」ルーチンのフローチャート。
【図44】 第3実施形態のナビゲーションシステムの制御手順の「出力完了」ルーチンのフローチャート。
【図45】 第3実施形態のナビゲーションシステムの制御手順の「消去」ルーチンのフローチャート。
【図46】 第3実施形態のナビゲーションシステムの制御手順の「回数チェック」ルーチンのフローチャート。
【図47】 図22の「例外情報の処理」の動作の一例を示す図。。
【図48】 第3変形例(第3実施形態に対する変形)の制御に用いられるCLテーブルを示す図。
【図49】 第3変形例(第3実施形態に対する変形)の制御に用いられるCLテーブルを示す図。
【図50】 第4変形例(第3実施形態に対する変形)の制御に用いられるテーブルを示す図。
【図51】 第4変形例(第3実施形態に対する変形)の制御に用いられる制御手順の一部のフローチャート。
【図52】 第4変形例(第3実施形態に対する変形)の制御に用いられるテーブルを示す図。
【図53】 第4実施形態のナビゲーションシステムの制御に用いられるテーブルを示す図。
【図54】 第5変形例(第4実施形態の変形例)のナビゲーションシステムの制御手順の一部フローチャート。
【図55】 第5実施形態のナビゲーションシステムに用いられるテーブルの構成を示す図。
【図56】 第5実施形態のナビゲーションシステムに用いられるテーブルの構成を示す図。
【図57】 第5変形例(第5実施形態に対する変形例)のナビゲーションシステムに用いられるテーブルの構成を示す図。
【図58】 第5実施形態のナビゲーションシステムの制御手順の一部を示すフローチャート。
【図59】 第6実施形態のナビゲーションシステムのユーザインタフェースの画面を示す図。
【図60】 第6実施形態のナビゲーションシステムのユーザインタフェースの画面を示す図。
【図61】 第7実施形態のナビゲーションシステムの制御手順に用いられるテーブルを示す図。
【図62】 第7実施形態のナビゲーションシステムの制御手順の一部を示すフローチャート。
【図63】 第7変形例(第7実施形態に対する変形例)の制御に用いられるテーブルを示す図。
【図64】 第7変形例(第7実施形態に対する変形例)の制御手順の一部を示すフローチャート。
【図65】 第8実施形態のナビゲーションシステムで用いられるユーザインタフェースの表示画面を示す図。
【図66】 第8実施形態のナビゲーションシステムの制御手順の一部を示すフローチャート。
【図67】 第1変形例(第1実施形態に対する変形例)の制御で用いられるテーブルを示す図。
【図68】 第1変形例(第1実施形態に対する変形例)の制御手順の一部を示すフローチャート。
【図69】 第2変形例(第2実施形態に対する変形例)の制御で用いられるテーブルを示す図。
【図70】 第9実施形態のナビゲーションシステムの動作を示すタイミングチャート。
【図71A】 第9実施形態のナビゲーションシステムでの時間間隔の算出原理を説明するグラフ。
【図71B】 第9実施形態のナビゲーションシステムでの時間間隔の算出原理を説明するグラフ。
【図71C】 第9実施形態のナビゲーションシステムでの時間間隔の算出原理を説明するグラフ。
【図71D】 第9実施形態のナビゲーションシステムでの時間間隔の算出原理を説明するグラフ。
【図71E】 第9実施形態のナビゲーションシステムでの時間間隔の算出原理を説明するグラフ。
【図71F】 第9実施形態のナビゲーションシステムでの時間間隔の算出原理を説明するグラフ。
【図72】 第9実施形態のナビゲーションシステムの制御手順の一部を示すフローチャート。
【図73】 第9実施形態のナビゲーションシステムの制御手順の一部を示すフローチャート。
【図74】 第9実施形態の制御手順の変形例の原理を説明する図。
【図75】 第10実施形態のナビゲーションシステムのユーザインタフェース画面を示す図。
【図76】 第10実施形態のナビゲーションシステムの制御に用いられるテーブルを示す図。
【図77】 第6実施形態の制御を一部変形した例のフローチャート。
【図78】 第7実施形態の制御を一部変形した例のフローチャート。
【図79】 全実施形態に用いられるユーザインタフェースを示す図。
【図80】 全実施形態に用いられるユーザインタフェースを示す図。
【図81】 第11実施形態のナビゲーションシステムの制御に用いられるテーブルの図。
【図82】 第11実施形態のナビゲーションシステムの制御に用いられるテーブルの図。
【図83】 第11実施形態のナビゲーションシステムの制御に用いられるテーブルの図。
【図84】 第12実施形態のナビゲーションシステムの制御に用いられるテーブルの図。
【図85】 第12実施形態のナビゲーションシステムの制御に用いられるテーブルの図。
【図86】 第12実施形態のナビゲーションシステムの制御に用いられるテーブルの図。
【図87】 第12実施形態のナビゲーションシステムのユーザインタフェースを示す図。
【図88】 第12実施形態の制御手順の一部を示すフローチャート。
【図89】 第13実施形態の制御手順を示すフローチャート。
【符号の説明】
1 車体
2 集中制御ユニット
3 車載LANユニット
4 RAMカードドライブ
5 データドライブ
6 音声ガイド用スピーカ
7 マイク
8 ディスプレイ
9 携帯電話
10 操作スイッチ
11 GPSアンテナ
12 FMアンテナ
13 電話アンテナ
14 電波ビーコンアンテナ
15 光ビーコンアンテナ
16 FMチューナ
17 ナビゲーションコントローラ
18 ビーコン信号受信機
19 CD−ROMチェンジャ[0001]
[Industrial application fields]
The present invention relates to a navigation device that outputs, for example, audio information, and more particularly to a navigation device that outputs information that is truly necessary for a driver in a regulatory manner when a plurality of pieces of information exist simultaneously.
[0002]
[Prior art]
As computer information becomes multimedia, automobiles are also rapidly becoming multimedia. For example, the types of information include navigation information, VICS information, Audio Visual information, radio, in-vehicle phone, teletext, and vehicle system.
The biggest problem with multimedia information is the simultaneous generation of large amounts of information. In particular, even if the driver is not involved, a large amount of information from, for example, VICS information or audio multiplex broadcasting is sent. A prominent feature in the multimediaization of automobiles is that video information will affect the driver's driving even if a large amount of information is flowed if the driver is not interested in the video, or if the gaze is removed from the direction of the video. Never give.
[0003]
However, in a case where useful information and useless information are mixed, the voice information forces the driver to concentrate on consciousness in order to identify whether it is useful or useless. It is also difficult to hear, for example, when the driver is performing an emergency avoidance operation, when a voice that is not so necessary is played, such voice information affects the driving operation of the driver. There may be cases.
[0004]
In particular, with regard to the regulation of output of audio information, conventionally, for example, in Japanese Patent Application Laid-Open Nos. 5-142994, 5-203458, and 5-332778, the volume at the time of outputting audio information is mainly controlled. However, when the volume is controlled, information on a small volume may in turn cause tension on the driver.
In Japanese Patent Laid-Open No. 2-114117, the driver himself / herself can set in advance a plurality of routes where the driver desires navigation by voice, thereby eliminating unnecessary voice guidance.
[0005]
Further, in Japanese Patent Laid-Open No. 4-1898, by controlling the length of the voice information of the guidance sentence in accordance with the vehicle speed, the time when passing the vicinity of the target point and the time when the output of the guidance information ends are synchronized. Thus, it is easy to make the relationship between the content of the guidance and the object.
Japanese Patent Laid-Open No. 5-118866 determines the degree of familiarity with respect to each road by accumulating the number of travels, and controls on / off of voice information according to the degree of familiarity. This is because the voice information is cut because it is not necessary to provide the voice information on a familiar road.
[0006]
[Problems to be solved by the invention]
Even in the technique disclosed in Japanese Patent Laid-Open No. 2-114117, when a large amount of multimedia information is generated at a location where the driver itself sets voice guidance, unnecessary voice cannot be excluded. In addition, as in JP-A-4-1898, even if the length of the voice information of the guidance sentence is controlled according to the vehicle speed and the length is shortened, if a plurality of pieces of information are generated at the same time, , The target pointPassed awayAt that time, that goalpointMay be output.
[0007]
In the method disclosed in Japanese Patent Laid-Open No. 5-118866, when a large amount of multiple pieces of voice information are generated simultaneously while traveling on a road that is not well known, all the voice information is output in the same manner. After all, unnecessary information may be thrown away and information that is really necessary may be postponed.
In other words, all of the above prior arts are not conscious of the presence of multiple pieces of information at the same time. In other words, they are not expecting the arrival of the automobile multimedia era, so information is dripping in a state of cobblestone chaos. It was.
[0008]
The present invention has been made in view of such points, and its purpose is emergency information.ImportantinformationTheAt the right timeOfferA navigation device that can be used is proposed.
[0009]
[Means for Solving the Problems]
To achieve the above objective,According to the present invention,A navigation device that provides information to an automobile occupant at a predetermined timingBecauseMeans for determining whether or not predetermined top-priority information has been input; and interrupt means for restricting provision of other information and providing the top-priority information when the top-priority information is inputDetecting means for detecting the type of travel path on which the automobile is traveling;And the other information whose provision is restricted by the interruption means,The type of the current road detected by the detecting meansWhether it will be re-delivered according toWhen provision of the other information is restricted by the interrupt meansWhen it is determined and re-provided, it is re-provided after the provision of the highest priority information.A navigation device is provided.
Also,According to the present invention,A navigation device that provides information to an automobile occupant at a predetermined timingBecauseMeans for determining whether or not predetermined top-priority information has been input; and interrupt means for restricting provision of other information and providing the top-priority information when the top-priority information is inputDetecting means for detecting the travel location of the automobile;And the other information whose provision is restricted by the interruption means,Current travel location detected by the detection meansWhether it will be re-delivered according toWhen provision of the other information is restricted by the interrupt meansWhen it is determined and re-provided, it is re-provided after the provision of the highest priority information.A navigation device is provided.
According to the present invention, there is provided a navigation device that provides information to an occupant of a vehicle at a predetermined timing, the means for determining whether or not predetermined top priority information is input, and the top priority information is input. In this case, there is provided an interruption means for restricting provision of other information and providing the highest priority information, and a detection means for detecting the weather at the travel point of the automobile, and the provision by the interruption means is restricted. The other information thus determined is re-provided when the provision of the other information is regulated by the interrupting means whether or not the information is re-provided according to the current weather detected by the detecting means. In some cases, the navigation device is provided again after the provision of the highest priority information.
According to the present invention, there is provided a navigation device that provides information to an occupant of a vehicle at a predetermined timing, the means for determining whether or not predetermined top priority information is input, and the top priority information is input. The provision of the highest priority information by restricting the provision of other information, and the detecting means for detecting the vehicle speed of the automobile, the provision of which is restricted by the interrupt means The other information is determined and re-provided when the provision of the other information is restricted by the interrupting means to determine whether or not the vehicle speed detected by the detecting means is re-provided according to whether the vehicle speed is medium or low. In such a case, the navigation apparatus is provided again after the provision of the highest priority information.
[0010]
BEST MODE FOR CARRYING OUT THE INVENTION
Hereinafter, various embodiments in which the navigation apparatus and method of the present invention are applied to automobile navigation will be described in detail with reference to the drawings..
<System configuration>
First, a system configuration common to navigation devices according to all embodiments (and modifications thereof) of the present invention will be described with reference to FIGS. 1 to 3.
[0011]
FIG. 1 is a diagram showing a front view as seen from a driver seat of an automobile to which the navigation device of the embodiment is applied. FIG. 2 and FIG. 3 are system configuration diagrams showing an example of a state in which the navigation device as one embodiment of the present invention is mounted on an automobile.
In FIG. 2,
[0012]
Further, the
[0013]
In the navigation system according to the embodiment to be described below, information (particularly voice information) that is unnecessary or too large for the driver and may cause discomfort is suppressed or not output. Further, in the navigation system, even when a plurality of sound information is generated at the same time, it is essential to provide only one sound information to the driver at a time, so only one sound information, that is, the plurality of sound information is provided. Although it is necessary to select only one specific piece of information from the information, in the system of the present embodiment, the one piece of voice information includes the priority order of the information itself and the driving condition (independent of the information) The information is selected based on the “importance” of the information generated from the relevance to the travel state, travel environment, travel time zone, travel purpose, and the like. In addition, when there is a conflict as described above, there is information to be deleted if predetermined conditions are met. This information will be deletedButIt is displayed on the display, or the voice information is converted into character information instead and displayed on the head-up display shown in FIG.
<User interface>
The
[0014]
FIG. 79 shows a switch for requesting information set via the touch panel. As shown in FIG. 79, the system can access information of six genres such as “news”, “weather”, “sports”, “traffic information”, “vehicle information”, “gasoline” (GAS) and the like. FIG. 79 shows function buttons (switches via a touch panel) for accessing such information. When a specific switch is pressed, only information corresponding to the pressed switch is provided to the driver.
[0015]
The information genre switch (FIG. 79) displays a genre that seems necessary in the current running state. For example, the genre of “GAS”
Vehicle information thatCentral control unit 2In response to this, the “GAS” menu is displayed. This display is not requested by the driver, but is determined by the system based on various information. In another example of FIG. 79, if the wiper is operated, the system determines that it has rained and displays the “weather” menu.
[0016]
FIG. 80 shows a switch for requesting various functions prepared in this system.
The “Cancel” switch cancels access to the currently selected information. The “Repeat” switch reproduces the information currently being guided (stored in the data drive device 5) from the first item. The “voice main” switch switches whether to perform voice information guidance.
[0017]
The “voice request” switch is a switch unique to the present system. When this switch is pressed, various multimedia information provided in the present navigation system is provided in a predetermined order.
The “skip” switch has a function of skipping one item or genre.
[0018]
The “select” switch has a function of selecting and determining the genre of information. "Function" switch has a function to memorize specific items and to guide only the information directly.
<Types of media and information>
The information media to be targeted in the navigation system of this embodiment shown in FIGS. 1 to 3 are NAVI, VICS, audio, radio, in-vehicle telephone, teletext, vehicle system, and the like. And the information from these media, as shown in Figure 4,
Vehicle information,
NAVI information,
VICS information,
audio,
Car phone information,
Teletext information
A specific example of this information is as shown in FIG.
<Regulation of information provision based on priority and driving conditions>
In the navigation system of this embodiment, the vehicle information, NAVI information, VICS information, audio, in-vehicle phone information, teletext information, and the like described above are used as information necessary for navigation. However, in a multimedia navigation system, it may be normal that information to be provided occurs at the same time, and simultaneous information provision may cause discomfort to the driver, and information provision that cannot be handled by the driver will be provided to the driver. It will cause confusion. This is especially true when the information is audio information.
[0019]
Therefore, the navigation system of various embodiments of the present invention gives priority to important information when information is present at the same time, or regulates information from media considered unnecessary under a predetermined condition. The driver is provided with necessary information.
FIG. 5 shows examples of maps that can be selected by the driver in various embodiments to be described.
[0020]
In general, while the vehicle is traveling, traveling conditions (for example, vehicle speed, distance between vehicles, auto-cruise state, etc.) vary in various ways. In the first embodiment, the mode of information regulation is changed in accordance with changes in travel conditions. However, in the multi-navigation system, information ranges from emergency information (accident information) that should not be regulated and highly urgent, to information that is not urgent at all, such as music program titles. The regulation of information provision should be determined according to the travel conditions at the time of provision. Therefore, in these embodiments, the mode of information regulation is changed according to the change of the travel conditions. However, since the driving conditions vary depending on each driver and the road on which the driver is driving, in this embodiment, as shown in FIG. ”,“ Traveling state ”,“ traveling environment ”,“ traveling purpose ”,“ time zone ”,“ driver state ”, and“ information accuracy ”. That is, the travel conditions are classified into seven types, and a map that defines the information regulation mode is set for each travel condition. On the other hand, for the driving conditions, reference information as shown in FIG. 5 is displayed on the driver (on the display 8) for each driving condition, and what information is regulated by selecting which map. It can be predicted.
[0021]
The selection of the map is performed according to the control procedure (described later) in FIG.
<Definition of data, table, etc.>
First, the regulation of information provision according to the “running state” will be described as a first embodiment with reference to FIGS. 4 to 23 and the like.
[0022]
FIG. 6 shows a table that defines the types of information generated in the system of the other embodiment as well as the first embodiment, and various attributes given in advance to the types of information. As types of information, “emergency information”, “vehicle information”, “VICS information”, “traffic information”, “NAVI information”, “weather information”, “news”, “sport information”, “event information”, “ Ten types of “music title” are set. In particular, the table of FIG."Type" KND,"Rank" (priority)PRD, “Rank (D value) ”RKD,"Rank (correction value)" RKC, “Capacity (D value)” CAPD, “Capacity (change value)” CAPC, “Remaining amount” REM, “Pointer”PTRDefine
[0023]
Each mediaFromThe input information includes “priority” PRD, “rank (D value)” RKD corresponding to the information,"Rank (correction value)" RKC, “Capacity (D value)” CAPD, “capacity (change value)” CAPC, and “remaining amount” REM are added and stored in the planned memory.concreteEach information is given an identifier KND indicating its type. For example, information with KND = 3 is VICS information. In addition, “priority” PRD is set in advance for each type of information. The value of “priority” PRD indicates the priority when providing the information. For example, the information input from the VICS medium is given an identifier of KND = 3, and the value of the priority PR Is “3”. The lower the priority, the higher the priority. Therefore, “emergency information” (KND = 1) such as a vehicle fire or a tunnel accident is given the highest priority. The “priority order” PRD shown in FIG. 6 means a default value, from which the driver can change the value by a predetermined operation. The changed priority value PRC is the PRC in the table of FIG.(Not shown in the figure)Is remembered.
[0024]
"Rank(D value)“RKD” means a priority rank value (however, a default value), and “A”, “B” to “E” are set as examples. “Rank” indicates a measure of priority. In the example of FIG. 6, “VICS information” (PRD = 3), “traffic information” (PRD = 4), and “NAVI information” (PRD = 5) , Same "rank(D value)(= C). How the rank value is utilized for control will become clear from the description of the control procedure.
[0025]
"capacity(D value)“CAPD” means a capacity value (default value) of a storage area permitted for the type of information. FIG. 7 shows an example of setting of the memory area. As described above, although various types of information have storage capacity restrictions depending on the information, emergency information should not be restricted in view of its importance. Therefore, as shown in FIG. 7, when only the emergency information exceeds the capacity given to the “emergency information”, it can be saved in the “free area” (4
[0026]
The capacity CAPD set in various information can be changed as will be described later. FIG. 8 shows a change screen. The changed capacitance value is stored in CAPC in the table of FIG.
The “remaining amount” REM in the table of FIG. 6 stores the remaining amount of the storage area remaining for the corresponding type of information. If information exceeding the remaining amount is to be input, it is converted into character information (if conversion is possible) and is not stored, unless the information is emergency information.
[0027]
Pointer PTR has input informationthere wereIf so, it indicates the location on the memory where the information should be stored. FIG. 9 shows a list of input information and information to be output and constitutes a queue table. Specifically, it is a table showing how information input up to the time t3 is stored at a certain time t3. In the example of FIG. 9, at time t1, data = X vehicle information (KND = 2), at time t2, data = Y traffic information (KND = 4), and at time t3, data = Z emergency information ( KND = 1) is input. Next, when information is input, it is stored in the table at the position indicated by the pointer r.
[0028]
The “input queue” IQ in FIG. 9 is a flag indicating that information has been input and processing of this information is requested. The “outputting” flag OUTP being “1” indicates that this information is currently being output (provided). Further, the “output queue” flag OUTQ being “1” indicates that the corresponding information is queued to be output (not yet output).
<First embodiment> ... Regulation of information provision according to the driving state
First, the regulation of information provision according to the “running state” will be described as a first embodiment with reference to FIGS. 4 to 23 and the like.
[0029]
FIG. 10 shows the main routine of the control procedure of the first embodiment.
In this navigation system, activation (step S100) / deactivation (step S700) of the operation is defined by turning on / off an enable switch (EN-SW) (not shown). That is, as long as the EN-SW is on, the main routine of steps S101 to S600 is executed.
[0030]
Step S101 is a routine for inputting various information. That is, in step S101, information input from various multimedia (step S300 = FIG. 14), information input routine for the driver to select a map (step S200 = FIG. 16), An information input routine (step S400 = FIG. 15) for correcting or changing data is executed.
[0031]
In step S120, the input information table (FIG. 9) is scanned and the input queue is scanned.flagSearch for information (information to be processed as audio information) having IQ of “1”. If such information is found, the process proceeds to step S500, and a control operation for determining whether or not the information should be provided is performed. Details of step S500 are shown in FIG.
[0032]
The features of the control of the first embodiment are shown by the tables in FIG. 13 and FIG.
That is, in the priority lower limit table shown in FIG. 13, when there is information to be provided as voice, the vehicle running state STAT at the time of provision and the lower limit value RKLMT that regulates the rank value RKC of the information. Define relationships.
[0033]
Assume that input information (X, Y, Z) as shown in FIG. 9 is stored in the memory as audio information to be provided. When the current vehicle is in a sudden braking state, since the lower limit value RKLMT is A, only information having a rank value of A or higher is recognized as information to be provided. Therefore, at this time, the information X and Y whose rank values are “B” and “C”, respectively, are not provided as audio information.
[0034]
On the other hand, when the current vehicle is in the reverse state, the lower limit value RKLMT is “C”, so that only information having a priority level of “C” or higher is recognized as information to be provided. Therefore, at this time, all the information X, Y, and Z (all in the example of FIG. 9) whose rank values are “A”, “B”, and “C”, respectively, are provided as audio information.
[0035]
In this way, in the first embodiment, when a plurality of pieces of information to be provided as voice information exist at the same time, the priority determined according to the running state (for example, seven states indicated by STAT in FIG. 13). The provided information is sorted according to the limit RKLMT (degree of priority).
In the regulation of information provision based on the priority limit RKLMT (priority level), when there are a plurality of pieces of information having a rank higher than the priority limit RKLMT, it is not possible to give priority to the provision of these information. Therefore, in the first embodiment, according to the priority order PRC that is uniquely assigned to the information type KND for the purpose of giving an absolute priority order between information items for which no priority order exists in the priority limit RKLMT. It gives a unique ordering relationship to the provision of information.
[0036]
By restricting the provision of information according to the priority limit RKLMT, information that does not need to be taken into account depending on the driving state is removed from the control target, thereby providing information according to the priority PRC (or PRD). Regulation can be performed efficiently and reliably.
Next, details of the information input control and the information provision control of the first embodiment will be described with reference to FIGS. 17 to 23.
[0037]
If there is any input, it is determined in step S101 in FIG. 10 whether the input is input of multimedia information, input by a driver for selecting a map, or input by a driver for correcting map data. To do.
The selection of the input item is realized by selecting an icon switch displayed on the
[0038]
When there is an input for selecting a map (selection of a map selection menu), map items that can be selected in step S204 of FIG. 16 are displayed on the
[0039]
If the user selects map correction in step S101, step S400 and subsequent steps in FIG. 15 are executed. That is, in step S400. The map corresponding to the value held in the register ID isdisplay8 is displayed. In step S402, input by the usermapEnter the correction value for the data. For example, the user can change the lower limit value RKLMT of the running state “reverse” from the current “C” to “B” in the map of FIG. In step S404, data correction and consistency with existing data are checked. For example, if the user changes the lower limit value RKLMT of the running state “reverse” from the current “C” to “E” in the map of FIG. 13, the lower limit value RKLMT of “reverse” cannot be “E”. If it is, it is recognized as an error. In step S406, the map is updated with the corrected data.
[0040]
If it is detected in step S101 that multimedia information has been input, step S302 and subsequent steps in FIG. 14 are executed. That is, in step S304, the input information type KND is recognized. In this embodiment, as described above, 10 types of information such as “emergency information” are set in the present embodiment. However, the
[0041]
If DV ≦ REMKND (NO in step S310), the information can be stored and stored in a predetermined area in the data drive 5. In step S322, the pointer PTR is updated to indicate the next storage area in the data drive 5. In step S324, the input queue flag IQ (referred to by the pointer r in the FIG. 9 table) corresponding to the information in the information table (FIG. 9) is set to “1”, so that the information is stored. Indicates that the information has been input and requests processing of the information. In step S326, the pointer r is updated.
[0042]
Since DV> REMKND indicates that there is not enough storage in the storage area to store the information, it is checked in step S328 whether the information is emergency information based on the KND of the information. . If it is emergency information, emergency information is saved in the free area (see FIG. 7) in step S340. In step S342, the pointer PTR indicating the storage area for the information (emergency information) is updated so that it indicates the next storage position. In step S342, the input queue flag IQ (referred to by the pointer r in the table of FIG. 9) corresponding to the information in the information table (FIG. 9) is set to “1”, and the information is input. In response to the request, processing of the information is requested. In step S344, the pointer r is updated.
[0043]
In order to save the recording area, unnecessary information may be periodically removed. Here, “unnecessary information” refers to information that has passed for a certain period of time, traffic information about points that have already passed, and song titles when not listening to the radio. If information that is not emergency information is input, but the remaining storage capacity is insufficient (NO in step S328), it is checked in step S330 whether the display mode is set. The display mode switch is a switch with an identifier ID = 8, and as shown in FIG. 25, the voice information scheduled to be regulated is displayed on the display device (head-up display in FIG. 1) instead. Or whether to display a message indicating that the voice information is restricted.Fig. 25If the EN switch in the middle is selected, the system is notified that the user desires an alternative display when the audio information is restricted. When “Conversion display” is selected, the voice information is converted into text information and the alternative output mode is selected. When “Message display” is selected, the text message means that the voice information is restricted. Alternative display is performed. If the “conversion display” mode is set, in step S338, the voice information is converted into character data and then displayed on the head-up display. Not displaying on the
[0044]
If the “message display” mode is set, a message indicating that there is information not stored is displayed on the
As described above, in the system according to the embodiment, the storage area is set according to the medium and according to the type of information, so that the
[0045]
As described with reference to the flowchart of FIG. 14, if information is input, a flag IQ requesting to be processed is set to “1” in the information. In step S120, the setting state of the information flag (IQx) stored in the
IQx = 0
Or all information with IQx = 1 has already been output,
IQx = 1
For all information x
OUTPx = 1
Then, step S500 and step S600 are not executed. On the other hand, in step S120,
IQx = 1
And
OUTPx = 0
If there is such information x, the “information provision control” (detailed in FIG. 17) procedure of step S500 is executed.
[0046]
In step S502 of FIG. 17, the argument x of the information is saved in the register n. In step S504, the running state STAT of the vehicle is examined. As the vehicle running state STAT, seven types of “sudden turning”, “sudden braking”, “reverse”, “lane change”, “right / left turn”, “rapid acceleration”, and “normal” are assumed. In step S506, the lower limit value RKLMT is read from the “priority lower limit value RKLMT definition table” (FIG. 13) according to the detected running state STAT. In step S508, the rank value RKC of the requested information is compared with the lower limit value RKLMT,
RKCn ≧ RKLMT
Only information that is is taken into consideration for providing information in step S520. Therefore,
RKCn <RKLMT
Information n such as is waiting for information provision. That is, the process proceeds to step S510 to update the queue of FIG. In this update, the information n once checked in step S508 is moved to the end of the queue, thereby preventing the same information from being continuously processed in FIG. Note that as the processing in step S510, the information may be cleared instead of the control for waiting for the information provision (ie, voice output).
[0047]
FIG. 26 shows a situation in which information generated during a certain running state (rapid turn) is postponed until the running state is canceled (for example, transition to normal running). As described above, in the present embodiment, when there are a plurality of pieces of information to be provided at the same time, only appropriate information (RKC ≧ RKLMT) is selected according to the traveling state, and the information is provided. Therefore, the necessary information is selected and provided to the driver, so that the driver does not feel uncomfortable.
[0048]
If it is determined in step S508 that RKCn ≧ RKLMT, the information n is an object to be considered for information provision. Therefore, in step S520, it is finally determined whether or not the information n should be provided. In the first embodiment, this determination is made according to the priority PR and the rank value RK.
Next, the “providing information according to priority” subroutine performed in step S520 will be described. This subroutine is shown in FIG. 18, and the outline of the control is explained in FIG.
[0049]
In the first embodiment, the table RKLMT in FIG. 13 distinguishes information that needs to be provided from information that is not required depending on the running state. If there is information having the same rank value RKC at the same time only by this lower limit value RKLMT, it cannot be determined which of the information should be prioritized. Therefore, in the first embodiment, the emergency level LVL of the output timing is defined based on the rank value PRC of the information and the running state STAT at that time, and this level value LVL (= 1-3) Mediates competing information based on
[0050]
FIG. 11 shows the level LVL indicating the output timing (output urgency) of the information to be determined based on the rank of information (input information or information being output) and the running state STAT at that time. The generation logic will be described. As shown in FIG. 12, this level LVL is used to determine the timing of outputting (providing) information. That is, when the information (information to be output or information that is currently output) is queued and exists, the LVL includes the rank value RKC included in the information and the running state at that time. In view of the above, if the information is information to be output in the future, it is determined whether the output should be performed or waited, or the information is the information currently output.If there isUsed to determine whether the output should be continued or interrupted.
[0051]
FIG. 12 shows the result of the control procedure in FIG. Specifically, as shown in FIG. 12, the level LVL is used differently depending on whether or not there is already output information (referred to as “output information” for convenience). That is, the LVL is used to determine how to process the input information when the “input information” occurs while the “in-output information” does not exist. When “in-output information” exists, the LVL is used to determine whether or not to stop outputting the “in-output information”.
[0052]
If there is no information being output, NO is determined in step S522. Next, in step S550, the value of the level LVLn of the input information n is checked. When the value of LVLn is “1”, the process proceeds to step S554, and the input information is provided. Specifically, in step S554, the output queue flag OUTQn of the information n is set to “1”. As a result, input information whose level LVLn is “1” is output. The input information with LVLn being “1” is, for example, information with a rank of “A” in any running state, and with a rank of “B” or “C”, the running state is “reverse”, “lane change”, “right” Rank information for the case of only “turn left”, “rapid acceleration” and “normal”, and rank “D” for information when the driving state is “lane change”, “turn left / right”, “rapid acceleration” and “normal” only “E” refers to information only in the normal running state.
[0053]
When the level of the input information is “2”, the control procedure of FIG. 18 is not performed. As is apparent from FIG. 11, the level “2” information means that the ranks are “B”, “C”, and “D” in the “rapid turn”, “rapid braking”, and “route guidance in progress” states. In the “reverse” state, the rank information is “D”, and in the “right / left turn”, “rapid acceleration”, and “route guidance” state, the rank information is “E”. Information of level “2”, such as “vehicle information” during sudden turning or braking, is not urgent and need not be provided. Therefore, such input information is returned to the original routine from step S552 in order to wait. Note that the input information that is on standby is changed if the driving condition changes, for example, the “vehicle information” that is on standby because it is in the “rapid braking” state, and the vehicle is shifted to the “lane change” state. , The wait is resolved and output (if there is no other conflicting information).
[0054]
FIG. 27 shows an example in which information of LVL = 2 is waited. On the other hand, if the input information is level “3” information, the process proceeds to step S560 and subsequent steps. The information of level “3” is information of rank “E” in the “rapid turn”, “rapid brake”, and “reverse” states. Since this level of information is not urgent, provision is prohibited and the information itself is cleared. That is, in step S560, the queue flag IQn of the information n is reset (also deleted from the queue table in FIG. 9), and the audio data itself is cleared in
[0055]
If there is output information (YES in step S522), the process proceeds to step S524, and the argument x of the output information is saved in the register k. In step S528, the level LVLk value of the information being output is checked.
When the value of LVLk in the information being output is “1”, the process returns to the original routine. That is, when the level of the information being output is “1”, the output of the information being output is continued, but the input information is not provided, so that it is on standby. The in-output information with LVLn of “1” means that the rank “A” information is “reverse” in the travel state of “sudden turning”, “sudden braking”, and “route guidance range” according to the definition of FIG. ”Means information of rank“ C ”or higher,“ lane change ”,“ right / left turn ”,“ rapid acceleration ”means information of rank“ D ”or higher, and“ normal ”means information of all ranks. . As described above, the level “1” being output information is urgent information or information that does not cause a problem in the corresponding traveling state, and therefore the output of the currently output information is continued.
[0056]
Here, there is a problem when input information of rank “A” (for example, “emergency information”) is generated when there is output information in the state of level “1”. In particular, when the rank of the information being output is “B” lower than “A”, there is a possibility that the input information of this rank “A” may be put on standby. According to the level setting of FIG. 11, the input information of the rank “A” is made to wait in the traveling state where the output information of the rank “B” is neither “emergency turning” nor “emergency braking”. When it is output. Therefore, even if the input information of rank “A” is made to stand by in a traveling state that is neither “emergency turning” nor “emergency braking”, no problem occurs. Further, in the first embodiment, during the “emergency turn” and “emergency braking”, input information other than rank “A” is not processed by the operation in step S508 (FIG. 17). . Therefore, when the input information of rank “A” is generated during “emergency turning” or “emergency braking”, the situation where information of rank “B” or lower is already output may occur depending on the first embodiment. I don't get it.
[0057]
If it is determined in step S528 that the information being output is information of level “2”, the flag OUTPk is reset in step S530 in order to cancel the output state of the information being output, and in step S532 , A flag to put the information k that was being output in an output waiting stateIQ kIs set to “1”. The information whose output has been interrupted is next output when the running state that caused the interruption has changed.
[0058]
Here, in-output information with a level of “2” means that the information of rank “D” or higher in the “rapid turn”, “rapid braking” and “route guidance” states from FIG. In the state, it means information having a rank of “D” or higher, and in the “right / left turn”, “rapid acceleration”, “route guidance” state, information having a rank of “E” or higher. The level “2” information is not urgent even if the output is interrupted.
[0059]
In FIG. 28, the information k output during the sudden turn is changed to LVL = 2 because the other information n is generated, the output is interrupted, and then the provision is resumed due to the change of the running state. It shows how it is done.
If it is determined in step S528 that the information being output is information of level “3”, the process proceeds to step S542, and the output of the information being output is stopped by resetting the flag OUTPk of the information k. To do. Furthermore, since the data of the information is cleared in step S544, the information will not be output in the future. In step S546, a message is displayed on the
[0060]
Note that the queue flag may be simply left reset without clearing the data. The above-mentioned repeat switch (FIG. 80) can be used effectively.
As described above, according to the priority rank, according to the running state, according to the information competition state, the input information is returned to the output queue (OUTQ = 1), or is being output. Is stopped and returned to the output queue, the output request placed in the queue is output to the driver by the output routine of step S600 (detailed in FIG. 19). That is, in step S602 in FIG. 19, information in the output queue is extracted. The number of information in the output queue is stored in the register x. In step S604, the number of continuously output information is checked. Details thereof will be described later.
[0061]
If the number of continuous outputs is within the limit, it is confirmed in step S606 that no other information is queued as output, and the information m is marked as being output in steps S608 and S610 (OUTPm = 1). AndCentral control unitThe other is output to a digital signal processor (DSP) (not shown) in 2 and provided as audio. In step S614, the information output start time is stored in the register TMST. The process returns from step S614 to step S700 of the main routine (FIG. 10).
[0062]
The audio information output via the DSP will end soon. The end is detected as an interrupt. When there is an output completion interrupt, the control procedure of FIG. 20 is activated. In step S802 in the figure, it is confirmed that there is at least one queue that was being output. The number of the queue information that was being output in step S804 is stored in the register q. In step S806, the output queue (OUTP) is reset to indicate that the output has been completed. In step S808FinishThe stored time is stored in the register TMED.
[0063]
Here, the number check routine of FIG. 19 will be described.
Since it is unpleasant for the driver that information, particularly audio information, is output continuously, it is preferable that audio information generated excessively continuously is not cut and provided to the driver. However, since the number of continuous times to be regulated should be changed in accordance with the running state, in this embodiment, the limited number of times LMT is defined as shown in FIG.
[0064]
FIG. 24 explains the definition of “continuous output” in the first embodiment. The driver feels that the output is continuous.24As shown in the figure, the time difference from the end point of output of one information (= TMED) to the start point of output of the next information (TMST) is small. If the time difference threshold is δ,
TMST-TMED <δ
It is defined that the information output sequence such as is felt unpleasant when LMT overlaps. Therefore, if information is output continuously for LMT times, input information queued thereafter is removed from the queue to prevent the driver from feeling uncomfortable. However, the limit number of times LMT should be changed depending on the running state. Therefore, in the first embodiment, as shown in FIG. 21, the limited number of times LMT is made different depending on the traveling state. That is, information should not be removed when the vehicle is operating suddenly (sudden turning or sudden braking), so there is no restriction on the LMT in a sudden turning or sudden braking state. The closer the vehicle is to the normal state, the more comfortable the driver is driving. In other words, the degree of inconvenience in providing information is further reduced, so the limit number LMT is set to a larger value.
[0065]
The number of times may be checked when output is started. That is, step S604 (detailed in FIG. 22) is executed each time the output routine of FIG. 19 is executed. In step S572 in FIG. 22, TMST-TMED is calculated. In step S574, it is checked whether this difference is larger than the threshold value δ. If it is larger, the continuous output up to that point is of no problem, so in step S582, the counter CNTR that stores the number of continuous outputs is reset.
[0066]
On the other hand, if there is a time difference exceeding the threshold δ, the process proceeds to step S576, and the counter CNTR is incremented. In step S578, the count value CNTR is compared with the limited number of times LMT corresponding to the current running state STAT, and if the count value CNTR exceeds LMT, it is queued in the output table in step S580. Search for an information output request (IQ = 1). In step S590, the information output queue is reset.
[0067]
The details of the erase routine in step S590 are shown in FIG. That is, in step S592, when the current running state is a sudden turn or a sudden braking state, the routine returns to the routine shown in FIG. 22, and the queue is not reset. This is because it is preferable not to erase the information during a sudden turn or a sudden braking state. On the other hand, when the vehicle is not in a sudden turn or a sudden braking state, the cue is reset in step S594 according to the traveling state at that time. Note that the deletion of the queue in step S594 is not performed on the input information with the rank "A".
<Effects of First Embodiment>
According to the navigation system of the first embodiment described above, the following effects can be obtained.
1: In particular, by making the audio information input source multimedia, an abundant amount of information is guaranteed and the route guidance instruction becomes more appropriate.
1-1: When audio information becomes multimedia, there is a concern that an excessive amount of audio information is provided, which may cause discomfort or miss important information. First Embodiment However, since the method of restricting information provision differs for each medium (priority PR and priority rank RK for each medium), it is possible to restrict information provision suitable for the medium that is the source of the information.
1-2: Since the provision of information is regulated according to the current driving state, the optimum amount or type of information for the driving state is accurately given to the driver.
[0068]
Particularly in the first embodiment, as shown in FIG. 13, unnecessary information is cut in advance depending on the traveling state.
Further, as shown in the tables of FIGS. 11 and 12, since the emergency level LVL of the information output timing is determined based on both the running state STAT and the information rank RK, the running state STAT Only, or the information provision timing based on only the information rank RK is prevented. This is because the provision of information should be determined based on both the nature (rank or importance) of the information and the current driving state (urgent).
[0069]
Further, as shown in FIG. 21, by limiting the continuous output, the driver is not discomforted. Further, by changing the limit number of times according to the traveling state, important information is prevented from being lost depending on the traveling state.
2: In the system of the first embodiment, when a plurality of different pieces of information are generated at the same time, the output order is determined based on the priority (rank). The navigation information is appropriately provided to the driver by preferentially outputting the highly important information.
2-1: Information provided to the driver by discontinuing provision of low priority information (regulation by RKLMT in FIG. 13 and prohibition of output of
2-2: Provision of navigation information according to the user's preference is achieved by making it possible to correct the table defining the priority order.
3: For voice information that has been discontinued, the information itself or a message indicating that it has been discontinued is displayed on the display, thereby preventing both information loss and reducing discomfort. thisAlternativeThe display can be activated or deactivated according to the preference of the operator.
4: As shown in FIGS. 7 and 8, the storage capacity of the memory for storing information can be set for each medium. It is possible to prevent the memory recording area from being filled with a large amount of (unnecessary) information. Moreover, since the user can set the capacity, the operability is improved. Furthermore, since important information (emergency information) has a special storage area in an area that the user cannot know separately, it is possible to prevent such information from being stored due to insufficient storage area.
<Modification of First Embodiment> First Modification
(Audio data → Display data)
This first modification is a modification of the control (FIGS. 10 to 28) of the first embodiment. In the first embodiment, when voice information of rank “B” (information related to the vehicle) is generated in a sudden turning state or a sudden braking state, the information of rank “B” is relatively important. = 2 and depending on contention with other information, the audio information may be provided to the driver.
[0070]
In the first modification, when information on rank “B” is generated in a sudden turning state or a sudden braking state, LVL = 1 in view of the fact that the information on rank “B” is relatively important. By providing the provision timing level, it is ensured that the information is provided to the driver as information, but if the rank “B” information is text information, it is not converted to voice information, or if it is voice information, it is converted to text information. By converting and providing it to the driver, it is an object to prevent the driver's attention from being distracted by voice in a sudden turning state or a sudden braking state.
[0071]
FIG. 67 shows a provision timing level setting table used for the control of the first modification. The difference from that of the first embodiment (FIG. 11) is that, as described above, LVL = 1 is given to the rank “B” information in the sudden turning state or the sudden braking state, but the form of provision is only displayed. There is in point to keep in.
The first modification substantially uses the control procedure of the first embodiment, but replaces the “processing according to priority” routine (FIG. 18) of the first embodiment with the control procedure of FIG. That is, in the control of the first modification, when the information of the level of LVL = 1 is detected, if the information of the rank “B” is generated during sudden turning or braking, it is converted into character data (or character data). Display) on the
[0072]
In the first variation, the vehicle information of rank “B” is suppressed from being provided as audio information. However, when the braking information is suddenly braked or suddenly turned, the audio information of rank “A” is also troublesome to the driver. Therefore, the first modified example can be further modified so that the voice information of rank “A” is also displayed.
Second Embodiment: Consideration of driving environment
In the first embodiment described above, the information provision timing is determined by introducing the concept of the urgency level LVL (FIG. 11), particularly when the two pieces of information compete with each other. This level LVL is determined by the priority rank RK and the running state STAT as shown in FIG.
[0073]
In the second embodiment to be proposed below, competition is arbitrated according to the hierarchical relationship of the priority order and the traveling environment. For this reason, in the second embodiment, the flowchart of FIG. 31 is used instead of the flowchart of FIG. 18 of the first embodiment, and the table of FIG. 29 considering the traveling environment ENV instead of the table of FIG. Is used. Other flowcharts and tables are the same as those in the first embodiment.
[0074]
FIG. 29 shows a priority order determination table in consideration of the current travel environment ENV for the target information type KND. Since the priority order in the second embodiment indicates the classification of control actions after the priority order is determined, it is referred to as “classification CL” for the purpose of distinction from the “level LVL” in the first embodiment. In the second embodiment, three types of traveling environments are set as the traveling environment: a mountainous road, the vicinity of the home, and a traffic jam road. According to FIG. 29, even for the same type of information, if the driving environment is different, the importance is different for the driver. Therefore, the priority, that is, the value of the classification CL is also different according to the change. The value of the classification CL is assigned a smaller value as the importance is higher. For example, NAVI information has high importance on a congested road (value is “2”), but is moderate on mountain road (value is “3”), and knows the geography near home. The importance is low (value is “4”). In the second embodiment, information with a classification value CL of “1” is always output, and information with “4” is not output.
[0075]
FIG. 31 shows a control procedure for the second embodiment which replaces the flowchart of FIG. 18 of the first embodiment. That is, when executing the control procedure of FIG. 31, during execution of the main routine routine of FIG. 10, it is discovered that one piece of information x is queued, and the “information provision control” subroutine of step S500 is executed. (Details are shown in FIG. 17), and the “information provision control” subroutine (FIG. 17) is executed to execute step S520.
[0076]
That is, at the time when step S700 of FIG. 31 is executed, the number x of information to be provided is transferred to the register n. Therefore, in step S700, when processing the information n, it is checked whether or not there is information x that is already being provided (for convenience, as in the first embodiment, referred to as being output).
If the information x being output does not exist (there is no conflicting information), the queued information n may be output, so the process proceeds to step S736, that is, the information n is put into the output queue. The flag OUTQn is set to “1”.
[0077]
If the information x being output exists, the argument x is transferred to the register k in step S702, and "exception information processing" in step S703 is executed. Details of the exception information processing are shown in FIG.
In step S800 of FIG. 32, it is checked whether or not the type KND of the currently-output information k is emergency information (KND = 1). If the in-output information is emergency information, it should wait for the output of the information to end, so control does not return from step S800 to step S704 of the original routine, but the final routine of FIG. 31. Exit to step (return step), that is, end step S520 in FIG. Thus, even if there is an information conflict, if the information being output is emergency information, the output of the emergency information is ensured. If the emergency information n is input during the output of the emergency information k, the emergency information n is output after the output of the emergency information k is completed according to the control procedure of FIG.
[0078]
If it is determined in step S800 that the in-output information k is not emergency information, it is checked in step S802 whether the classification class CL of the input information n is “4”. As described above, in the traveling environment defined in the second embodiment, information with the classification value CL = 4 is not processed. In step S804, the queue flag IQn of the information n is reset, and the data is also cleared. Then, assuming that the processing of the information has been completed, exit to the final step (return step) of the routine of FIG. 31, that is, finish step S520 of FIG.
[0079]
On the other hand, when the output information k is not emergency information and the input information n is not CL = 4, the process returns to step S704 in FIG. 31 in order to process the input information n.
In step S704, the priority rank RKC of the information k being output and the information n scheduled to be output is checked.
[0080]
When the rank value RKCk of the currently output information k is equal to or lower than the rank value RKCn of the information n scheduled to be output (YES in step S704), the currently output information of the lower rank is stopped in step S706 in order to stop providing it. Proceed to, and reset the output flag OUTPk. Then, in step S708, the environment classification CL is determined for k of the information being output according to the table of FIG. Control differs depending on the value of the classification value CL. Note that the emergency information (CL = 1) and the information of CL = 4 have already been processed in step S703.
[0081]
When the classification value CL of the information k whose output has been stopped is “2”, the queue flag IQk of the information k is set to “1” in step S710. This is because, in view of the fact that the information k of the classification value CL = 2 is relatively more important than the information of CL = 3 in the current driving environment (compared to CL = 2), This is because it is scheduled to be provided again later. In step S712, in order to immediately output the information n instead of the stopped information k, the flagOUTQ nIs set to “1”.
[0082]
FIG. 33 shows a specific example of two pieces of conflicting information k and n that are the targets of steps S706 to S712. In this case, output of information k is interrupted when information n of rank “B” and classification “2” is input where information k of rank “C” and classification “3” is output first. Thus, the output of the information n is replaced, and then the output of the information k is resumed.
[0083]
If it is determined in step S708 that the classification value is “3”, that is, the rank value of the output information k is lower than the rank value of the input information n, but the classification value of the output information k is “3”. In this case, in order to clear the in-output information k, the queue flag IQk of the in-output information k is reset in step S714, the data is deleted in step S716, and the information is cleared in step S718. Is displayed on the
[0084]
If the priority of the information k that is already being output is higher than the priority of the input information n among the two pieces of competing information (NO in step S704), the environment classification value CL of the input information n is set in step S720. Investigate.
A case where the classification value CL of the input information n is “3” will be described. In this case, it means that the importance of the input information n is relatively low in the current driving environment. Therefore, there is no need to stop the output of the currently output information k having a high rank value RK. On the other hand, in view of the fact that the rank value of the output information k is higher than that of the input information n and the importance of the input information n is relatively low in the current driving environment, the input information n is not provided. This is preferable from the viewpoint of preparing for information of higher importance that may occur later. Therefore, the queue flag IQn of the input information n is reset in step S722, the data is deleted in step S724, and this is displayed in step S726. An example is shown in FIG.
[0085]
A case where the classification value CL of the input information n is “2” will be described. In this case, since the rank RK of the output information k is higher than the rank of the input information n, the output information k is not necessary, but the importance of the input information n is relatively high in view of the current traveling environment. There is no need to remove the input information n. Therefore, in this case, the process returns from step S720 to the original routine, and the output of the input information n is performed after waiting for the end of the output information k or after waiting for a change in the traveling environment.
[0086]
An example is shown in FIG. FIG. 30 shows the logic of the second embodiment.stillIn the second embodiment, three examples are shown in FIG. 29 as examples of the driving environment.
1: Driving road (flat road, mountain road, highway, road width (narrow / wide), toll road, traffic jam road),
2: Driving location (near home, urban area,OceanNear, tourist spots, ski resorts)
3: Weather (rainy weather, snow, outside air)Warm)
A map may be created depending on the situation.
<Effects of Second Embodiment>
According to the second embodiment described above, the following effects can be obtained. That is,
1: Exception information output processing (step S703 in FIG. 31, FIG. 32) allows special information (always highly important, for example, emergency information)AndThe control logic can be simplified by always excluding information of low importance (such as music titles) from the object of control.
2: Determine the output order of the conflicting information in consideration of the priority (RKC) and the driving environment ENV (step S704).
[0087]
When the priority rank RK of the in-output information k is low, the output of the in-output information may be stopped. Whether or not the stopped information is restarted is determined by the traveling environment. That is, when two pieces of information conflict, whether to stop outputting the information being output is determined according to the priority between the pieces of competitive information (step S704). The output should be determined by the importance (classification value CL) in consideration of the traveling environment of the information (step S708, step S710). If it is not resumed, the information is cleared (step S714).
[0088]
On the other hand, if the rank of the output information k is high (step S720), whether or not to provide the information of the input information n is determined by the importance (CL) considering the traveling environment of the input information n. That is, although the output state of the high-ranking output information k is maintained, the low-rank input information n is controlled according to the importance of the input information n with respect to the environment (steps S722 to S724).
[0089]
In the first embodiment and the second embodiment, the concept of the priority rank RK is introduced and the priorities are roughly classified. However, the present invention may be applied even if the ranks are subdivided and 1 rank = 1 rank is set. Holds. Resetting the rank can be easily performed using the display screen of FIG.
<Modification of Second Embodiment> ... Second Modification
In this second modification, the control method using the priority (PR) and the classification value (CL) of the second embodiment is changed to a running state (vehicle speed, turning speed, acceleration / deceleration state, lane change, right / left turn, forward / The present invention is applied to a method for controlling information provision in consideration of retreat, etc. (the method of the first embodiment).
[0090]
For the control of the second modification, the control of the second embodiment (FIGS. 29 to 34) can be used. In this case, the same logic change as the control logic of the second modified example is added to the modified example of the second embodiment. For this purpose, the table of FIG. 69 is used for control in place of the table of the second embodiment (FIG. 29). The control of the second modification uses this table..
<Third embodiment> ... Consideration of driving mode
In the third embodiment, when a plurality of pieces of information are generated, the necessity of information provision and the priority order of information provision are determined according to the driving mode.
[0091]
FIGS. 35 to 47 show flowcharts related to the control procedure of the third embodiment of the present invention and various tables used in the control procedure.
According to the third embodiment, the necessity of information provision and the priority of information provision are set according to the difference in the travel modes, that is, according to the difference in the travel modes of the general travel path (medium / low speed travel) and the high speed travel path. decide. In these two modes, as shown in FIG. 35, a priority order PR and a classification CL corresponding to the travel mode are given to various types of information. That is, if the driving modes are different, different priority orders PR and different classifications CL are given even for the same type of information. For example, the NAVI information is PR = 3 and CL = 2 in the general travel mode, but PR = 6 and CL = 3 in the high speed travel mode. NAVI information is less necessary because it is less likely to get lost on highways. Conversely, VICS information is more necessary. These settings can be changed by the user as in the first embodiment.
[0092]
In the table of FIG. 35, “x” in the priority column indicates that it is excluded from the control target. For such information, a classification value = 4 is given. Further, emergency information is always given the highest priority (= 1) and classification (= 1). Therefore, the emergency information and the information on the household failure are handled as “exception information” as in the second embodiment (see FIG. 47).
[0093]
A control procedure of the third embodiment will be briefly described.
FIG. 37 shows the main routine of the control procedure of the third embodiment. Since the configuration and operation are substantially the same as those in the flowchart of FIG. 10 of the first embodiment, description thereof will be omitted.
FIG. 38 of the third embodiment corresponds to FIG. 17 of the first embodiment, FIG. 39 corresponds to FIG. 14, FIG. 40 corresponds to FIG. 15, and FIG. 43 corresponds to FIG. 19, FIG. 44 corresponds to FIG. 20, FIG. 45 corresponds to FIG. 23, FIG. 46 corresponds to FIG. FIG. 47 corresponds to FIG. 18, and FIG. 47 corresponds to FIG. 32 of the second embodiment. Note that the definition table for limiting the continuous output in the third embodiment is exactly the same as that in the first embodiment, and therefore that of the first embodiment (FIG. 21) is used.
[0094]
The information provision control of the third embodiment is given by FIG. In the third embodiment, unlike the first modification in which the rank value is given to the information, a different priority is given to each travel mode, so that the exception information processing is performed by the information provision control in FIG. Although this exceptional information processing control is performed in step S1808, its contents are substantially the same as in the second embodiment (FIG. 32), that is, emergency information (classification value CL = 1) and classification value CL = 4. This information is specially processed. For this exceptional information processing, as in the case of the first embodiment, in the “processing according to the priority”, if the information having only the classification values CL of “2” and “3” is to be processed, It will be good.
[0095]
The process shown in FIG. 42 of the third embodiment determines the output order of the conflicting information in consideration of the priority (PR) and the driving mode (step S1824). That is, the output order of information and the necessity of providing information are determined in accordance with various travel modes.
The information output order is basically the same as that of the second embodiment. In particular, referring to the logic for determining whether or not to provide information, if the priority PR of the currently-output information k is low, the output of the currently-output information may be stopped, but the stopped information is resumed. Whether or not it is determined by the driving mode. That is, when two pieces of information are in conflict, whether to stop outputting the information being output is determined according to the priority between the pieces of competitive information (step S1824). Is determined by the importance (classification value CL) in consideration of the travel mode of the information (step S1828, step S1820). If it is not resumed, the information is cleared (step S1824).
[0096]
On the other hand, when the priority of the information being output k is high (step S1832), whether or not to provide the information of the input information n is determined by the importance (CL) considering the travel mode of the input information n. . That is, although the output state of the high-priority output information k is maintained, the low-priority input information n is controlled according to the importance of the input information n with respect to the travel mode (steps S1834 to S1836). ).
[0097]
FIG. 36 shows a summary of the decision logic of the control procedure shown in FIG. This logic is substantially the same as in the second embodiment.
<Modification of Third Embodiment> ... Third Modification (Consideration of Time Zone)
In this modification, the order of information provision and the determination of necessity are determined according to the time period during which driving is performed.
[0098]
FIG. 48 shows the same definition table of the priority order PR and the classification value CL as in FIG. 35 of the third embodiment. As in the case of the third embodiment, the priority order PR and the classification value CL are determined for each type of information (can be changed), and the same type of information has different values depending on the time zone. The priority order PR and the classification value CL are given as in the third embodiment.
[0099]
In the third modification, as shown in FIG. 48, the time zone is specified by a name (for example, “meal” and “commuting”), and by a specific time (FIG. 49). ). The system configuration and control procedure of the third modification may be substantially the same as those of the third embodiment. This modification can also be expected to have the same effect as that of the third embodiment.
<Modification of Third Embodiment> ... Fourth Modification
(Consideration of time zone)
The fourth modification is a further improvement on the necessity of providing information according to the third modification. That is, in the third modification, as shown in FIG. 48 or 49, the information excluded from the target of determining whether or not to provide information (indicated by “x” in the figure) is the system. It was decided in advance by the user, and then the user changed it through the display. However, the information that is the target of necessity determination is predetermined according to the time zone, in other words, differs depending on the time zone. So this first4In the modified example, necessity determination target exclusion information determined in advance according to a user-defined time zone is stored as a table (FIG. 50).
[0100]
FIG. 51 shows a changed part of the control procedure according to the fourth modification with respect to the control procedure of the third embodiment. This control procedure is inserted between step S1806 and step S1808 of the third embodiment. Thus, the control procedure of the fourth modified example is completed.
That is, after executing step S1806, the travel time (current time) is read, and the travel time zone is determined from that time. An example of the determination logic is shown in FIG. With this logic, the current travel time zone can be determined without bothering the user. If the time zone is determined, the information shown in FIG. 50 is used to find information that should be excluded from information provision necessity. In the figure, those not marked with a circle are excluded.
[0101]
If the exclusion target is determined, “exception information” in step S1808.processing”To remove information that is not applicable.
<Fourth embodiment> ... Consideration of driving purpose
In the first embodiment, depending on the driving state (emergency operation, brake operation, steering wheel operation, etc.), in the third embodiment, depending on the driving environment (distinguishing between roads around the home and mountain roads) and driving mode (distinguishing due to speed differences). The necessity and order of information provision were determined.
[0102]
4th Embodiment determines the necessity and order of information provision according to the driving | running | working objective.
FIG. 53 is a table showing logic for determining necessity of information provision and classification of order according to the purpose of travel. In the fourth embodiment, commuting, travel, leisure, and shopping are listed as examples of travel purposes.
The system configuration and control procedure of the fourth embodiment may be substantially the same as those of the third embodiment. According to the fourth embodiment, the same effects as those of the first to third embodiments can be expected.
<Modification of Fourth Embodiment> ... Fifth Modification (Estimation of Travel Purpose)
In the system of the fourth embodiment, the driver who is the user sets the travel purpose via the display screen. In this modified example, the system estimates the travel purpose.
[0103]
The driving purposes estimated by the system of the fifth modification are five types: commuting, travel / leisure, sales activities, shopping, and guided driving by NAVI.
FIG. 54 shows a changed part of the control procedure according to the fifth modification to the control procedure of the fourth embodiment, and this control procedure is inserted between step S1806 and step S1808 of the fourth embodiment. Thus, the control procedure of the fifth modified example is completed.
[0104]
That is, travel estimation is performed after step S1806 is executed. This estimation logic is an example:
7 am-9am on weekdays ... commuting
Within 50km radius from home on holidays ... shopping,
More than 50km radius from home on holidays ... Travel / Leisure,
Is determined. Whether it is a weekday or a holiday is determined by the clock of the system, and the distance is determined based on the distance information of the NAVI system.
[0105]
Note that the target estimation may be performed by a switch or the like. Next, information to be excluded from the information necessity necessity is found from the map (FIG. 55). In the figure, those not marked with a circle are excluded.
If the exclusion target is determined, the information other than the target is removed by “exception information processing” in step S1808.
<Fifth Embodiment> ... Consideration of psychological state
The fifth embodiment is the same as the first to fourth embodiments in that it determines whether information provision is necessary and determines the order of provision according to driving conditions. That is, the fifth embodiment is the same as the fifth embodiment. The determination of necessity of information provision and the order of provision are determined according to the driver's psychological state.
[0106]
The control of the fifth embodiment uses the control of the third embodiment. FIG. 56 is a table showing how the importance (priority PR and importance classification CL) of various information changes according to the psychological state. This table is used in a similar manner that the control procedure of the third embodiment uses the importance level table (FIG. 35) according to the running state. That is, for the control of the fifth embodiment, step S1806 in the flowchart of FIG. 38 is changed to step S1806 ′ as shown in FIG. Step S1806 'refers to the table of FIG. In the fifth embodiment, the system determines the psychological state from the continuous running time, the running time zone, the number of times the brake is stepped on, the running speed, and the like.
[0107]
When step S1806 'is executed, the control of the fifth embodiment executes “exception information processing” of step S1808 of FIG. 38 as in the third embodiment. In this process, the emergency information is processed so that it is always provided exceptionally, and the information marked with x in the table of FIG. 56 is set to “non-control target information” according to the psychological state determined at that time. Is excluded from the information provision target information.
[0108]
Also, the priority order PR and the classification value CL in FIG. 56 are used in “processing according to priority” (see FIG. 42) for the fifth embodiment.
According to the fifth embodiment, the same effects as those of the third and fourth embodiments can be obtained.
<Modification of Fifth Embodiment> ... Sixth Modification
The distinction of the control target information in the fifth embodiment is classified into three types (fatigue state, tension state, and normal state) in the map of FIG. 56 and then indicated by x, but in this modification, It is proposed to classify them further finely, for example, as shown in FIG. <Sixth Embodiment> ... Specification of emergency information by user
In the control of the third embodiment, the so-called “emergency information” is exceptionally processed by “exception information processing” (FIG. 38) in step S1808, and is therefore surely and promptly provided to the driver. . However, the “emergency information” of the third embodiment is predetermined by the system. For example, tunnel information, earthquake information, vehicle information (failure alarm, inter-vehicle distance alarm, puncture alarm, etc.), traffic information (accident information, traffic regulation information), and the like. Therefore, “emergency information” was fixed. The sixth embodiment is characterized in that the user can designate “emergency information”.
[0109]
FIG. 59 shows a user interface for the designation. That is, when the driver selects “change information setting” on the screen on the display 8 (FIG. 59), a screen as shown in FIG. 60 appears, and the information currently selected as “emergency information” is a black circle. The candidates that can be selected as emergency information are displayed as white circles. When the user wants to add to the “emergency information”, the user selects the “◯” portion of the information with the operating device, and when he wants to exclude it from the “emergency information”, the user selects the black circle portion of the information with the operating device. By this selection, the black and white circles are inverted, and it is confirmed by the user that they have been added or excluded from the “emergency information”.
[0110]
Most of the control procedure of the sixth embodiment uses the control procedure of the third embodiment. In the information registered as “emergency information”, KND = 1 is registered as the information type. This KND = 1 is read in step S1806, handled exceptionally in step S1808, and provided to the driver quickly and reliably. In addition, this 6th Embodiment is original.Top priority informationIn addition to “emergency information” as described above, information designated by the user is handled as “emergency information”. As a modification of the sixth embodiment, for example, as shown in FIG. In addition, it is possible to propose a control in which only a difference in priority order with information that is pseudo-emergency emergency information is less than a predetermined value (for example, 2) is treated as emergency information.
<Seventh Embodiment> Automatic priority change
In the first to sixth embodiments, the priority order (priority order PR and rank RK) is determined in advance, and when changing the values, the user interface screen for change is displayed and the values are set. I was going to change it. In other words, the priority order is substantially semi-fixed. The reason for semi-fixing is that changing the priority value leads to a change in logic, and it is not preferable for the user to consider the change in logic. However, it is not preferable to keep the priority order fixed in the current traffic situation in which the driving conditions change variously.
[0111]
In the seventh embodiment, the system automatically changes the priority order and the like within a range determined in advance as appropriate, taking into account changes in the driving conditions.
FIG. 61 shows an example of a change logic such as a priority order provided in the seventh embodiment.
The control of the seventh embodiment uses most of the control of the third embodiment. FIG. 62 shows a changed part with respect to the control procedure of the third embodiment. This change is corrected by adding step S2000 between step S1804 (FIG. 38) and step S1806 (FIG. 38) of the third embodiment. Due to such a change in the control procedure, the system of the seventh embodiment has a priority order satisfying the rules shown in FIG. 61 from various vehicle data read in step S1804 (FIG. 38) in step S2000. Make corrections. In step S1806, in addition to the priority order PR corrected in step S200, the classification value CL, the number of times limit value LMT, and the like are read. Using the correction values, the “processing according to priority” routine is executed in step S1808. Execute.
[0112]
As the correction conditions in FIG. 61, correction for increasing the order of vehicle failure information in the event of a sudden failure in a vehicle, correction for increasing the priority of VICS information while traveling on a highway, or a mountain road During running (detectable by barometer) or in the rain (detectable by wiper operation), a lot of time has passed since correction of raising the priority of weather information, or information with high noise level or input Correction for lowering the priority of information, correction for lowering the order of VICS information in a direction different from the traveling direction, and the like.
[0113]
Thus, according to the seventh embodiment, since the priority order is determined more finely, optimal information provision is made in accordance with the current driving conditions and the nature of the information.
The priority changing method of the seventh embodiment can be applied not only to the third embodiment but also to the first to sixth embodiments.
The automatic change of priority is also effective when route guidance is actually performed. That is, when performing route guidance, the navigation controller of the navigation system notifies the driver of the fact that it is close to the guidance point at a plurality of guidance points up to the target value point. With this information, the driver can confirm that he / she is proceeding correctly toward the target point. In other words, the driver is expecting that a certain amount of information is given in the vicinity of the route guidance point, and on the contrary, extra information is given in areas other than the guidance point. I feel uncomfortable.
[0114]
Therefore, the
[0115]
on the other hand,Central control unit 2For information from media other than the NAVI information, when the route guidance control is operating and close to the route guidance point, for example, the priority order of news information or the like may be lowered. By doing this, near the route guidance point, the NAVI information is prioritized, and on the contrary, the priority other than the NAVI information is relatively lowered, and the information that is really necessary for the driver is provided to the driver.
<Modification of Seventh Embodiment> ... Deletion of obsolete data (seventh modification)
Since the vehicle speed is naturally limited, the same information may be input unnecessarily many times during a short distance, such as traffic information. Providing such information many times causes discomfort.
[0116]
Therefore, this modification is intended to prevent repeated provision of stale data information by lowering the priority of information having the same contents as information input in the past. This modification is particularly effective for information sent in a character data format, in which it is relatively easy to determine whether the contents are the same. This is because by lowering the priority of character data information of obsolete content, the probability that the information is provided (displayed or output by voice) is relatively lowered. Also, in the multimedia navigation system, even character data information is converted into voice data and output, so that the discomfort of the driver is reduced by not only outputting the stale information but also outputting the voice.
[0117]
The seventh modification also partially uses the control procedure of the third embodiment. That is, the control procedure of FIG. 64 is added and corrected between steps S1804 and S1806 of the control procedure of FIG. In the fourth modification, a recording area as shown in FIG. 63 is secured. In this storage area, the input time of character data, the number of times it is determined that the content is the same, and the data content are stored.
[0118]
It is checked whether or not the information input in step S2002 in FIG. 64 is character data. If it is not character data, it is not determined whether it is obsolete data. In the case of character data, in step S2004, it is searched whether or not there is the same information data as the input data in the storage area of FIG. If there is no data having the same contents, the information data is stored in the area shown in FIG. If there is the same content, the time difference is calculated in step S2008. If this time difference is smaller than the predetermined threshold value Δ, the same information is received within a short time, so the priority of the information is lowered in step S2012. On the other hand, if the time difference is larger than Δ, since a considerable time has passed since the previous data was input, the data is deleted from the storage area of FIG.
[0119]
The method of the fourth modified example also prevents the information on the same stale content from being repeatedly provided to the driver.
When data with the same content is input for the second time, the data is displayed on the
[0120]
<Eighth Embodiment> Preferential processing based on data contents
In the eighth embodiment, only data information having a specific keyword is preferentially provided to the user for information from teletext. That is, since teletext is text, if the information is kept on display, the user canGazeOn the contrary, it is focused on the fact that it is relatively easy to search for a specific keyword because it is character data information.
[0121]
The navigation system of the eighth embodiment displays a user interface as shown in FIG. 65 on the screen on the
[0122]
The control procedure of the eighth embodiment is achieved by using the control procedure of the third embodiment. A part of the flowchart of FIG. 38 (between steps S1804 and S1806) is changed as shown in FIG.
When information is input, it is determined in step S2100 whether the input information is text broadcast data. In step S2101, it is determined whether or not the teletext mode is set. If this mode is set, it is determined in step S2102 whether a keyword is set. If a keyword is set, the keyword is searched for in the received data in step S2104.
[0123]
If teletext data including a keyword is found, the information is converted into audio data in step S2110. The information converted into the audio data is processed in the same manner as other information according to the control procedure of the third embodiment. Information that is not found is processed as display data or erased according to the setting switch described above (setting to erase or not to perform).
[0124]
As keywords, teletext currently categorized into “sport information”, “weather forecast”, and “event information”, so specific keywords in those genres, for example, personally Enter the name of the team, the name of the player, the name of the area where you want to hear the weather forecast, the name of the event, etc.
According to the control procedure of the eighth embodiment, only what the driver is interested in (one that matches the keyword) is transmitted to the driver in the form of audio information that is easy to recognize and understand. Information that cannot be matched is erased so as not to make the driver uncomfortable or displayed on the
<Ninth Embodiment> ... Control of provision intervals between information
When voice information is frequently generated, the time interval at which the voice information is reproduced is also an element that is of concern to the driver. In the ninth embodiment, the information provision interval is controlled. In the driving environment, driving state, driving time, and psychological state in which the provision of information for fewer eyes is preferable to the driver, the driving environment in which more information is provided to the driver is set longer by setting the information provision interval longer. In the driving state, the driving time, and the psychological state, the information providing interval is set to be shorter, thereby controlling the optimum information providing amount per unit time.
[0125]
This “control of the provision interval between information” of the ninth embodiment is applicable to all the navigation systems of the first to eighth embodiments. Therefore, the principle of “control of information provision interval” applicable to all navigation systems of the first to eighth embodiments will be described with reference to FIG.
In FIG. 70, the time width T is a time interval (minimum value) between information optimum for the driver under the conditions at that time. The time starting point of the time width T is the output end time (TMED) of the previous information. Therefore,
TMED + T
Even if the next information is provided after this time, the driver is not uncomfortable.
[0126]
The principle of determining the minimum value of the provision time interval T will be described with reference to FIGS. 71A to 71F. According to FIGS. 71A-71F,
Provision time interval T = t0 * t1 * t2 * t3 * t4 * t5
Defined by Here, the time width t0 is a basic value of the provision time interval determined by the vehicle speed, as shown in FIG. 71A.
[0127]
In principle, the time interval should be shorter as the vehicle speed increases. However, when performing stable running on a road such as an expressway, there is no problem even if a higher amount of information is provided even if the vehicle speed is high. Therefore, as shown in FIG. 71A, the value of t0 is made smaller at a vehicle speed of 80 km / h or higher.
t1, t2, t3, t4, and t5 are correction counts, respectively.
[0128]
According to FIG. 71B, the correction count t1 is set to a larger value as the degree of traffic congestion becomes worse. This is because the amount of information provided should be reduced when traffic jams are severe.
According to FIG. 71C, the correction count t2 is set smaller as the road density is higher. This is because it is necessary to provide more route guidance information and the like in a region where the road density is high. According to FIG. 71D, the correction count t3 is set to a smaller value as the amount of provided information increases. This is because when there is a large amount of information to be provided, it is highly necessary to provide more information. According to FIG. 71E, the correction count t4 is set to be smaller when the navigation is operating than when it is not operating. This is because the driver wants navigation information when operating the navigation. According to FIG. 71F, the correction count t5 is set to a larger value as the information provision limit number LMT (see FIG. 21) is larger. As is clear from FIG. 21, the limit number LMT is set to a large value so that the driving state requires a lot of operations by the driver. Therefore, the smaller the limit number LMT, the less information is preferred. is there.
[0129]
FIG. 72 and FIG. 73 show the change part of the required control procedure when the time interval control of the ninth embodiment is applied to the navigation systems of the first to eighth embodiments.
72 and 73 respectively show an “output” routine for the ninth embodiment when the control of the ninth embodiment is applied to the first embodiment, for example (FIG. 19 of the first embodiment). And a flowchart corresponding to the “output completion” routine (FIG. 20).
[0130]
As described in FIG. 70, when the output of the previous information is completed, the delay time T (providing interval) is calculated according to FIGS. 71A to 71F in step S2210 of FIG. In step S2212, the timer is started with a time width T set.
Thereafter, when some audio information (referred to as k) is generated, the determination control of “necessity of information provision, priority of information provision” in the first to eighth embodiments is performed, and the voice information k On the other hand, an output queue (OUTQk = 1) is set (for example, step S554 in FIG. 18). Then, in the “output” routine of FIG. 72, in step S220, whether the voice information k is an emergency alert (KND = 1) or whether the current location is close to the navigation guidance location (crossover point, etc.). to decide. This is because emergency alerts (KND = 1) should not be delayed. This is because the driver needs more information in the vicinity of the navigation guidance point.
[0131]
If the audio information k is not an emergency alert and the current location is not near the navigation guidance location, it is checked in step S2202 if the timer set in step S2212 (FIG. 73) has timed out. If it has not timed out, it is still too early to provide this audio information k, so the output queue of this audio information k is reset in step S2204 to set OUTQk = 0. Resetting the queue for this information k ensures that higher priority information is provided that may occur after this information k.
[0132]
Thus, by controlling the provision interval, audio information having an optimal amount of information corresponding to the driving condition at that time is provided to the driver.
<Modification of Ninth Embodiment> ... Eighth Modification
In the ninth embodiment, the timer T is started every time the output of the previous voice information is finished. However, in the eighth modification, the timer T is started every time the output of the previous voice information starts. . In this case, as shown in FIG. 74, it is necessary to calculate the time required to provide the audio information ahead.
<Tenth Embodiment> Use of sound quality by information type
The tenth embodiment relates to an improvement in the output form of audio information applicable to each of the navigation systems of the first to eighth embodiments described above.
[0133]
The tenth embodiment has been made in view of excessive sound information that makes the driver particularly uncomfortable, and the input sound information is changed in sound quality or volume according to the state at that time. Output.
FIG. 75 is an example of a display screen of a user interface for setting the output mode of audio information. In the tenth embodiment, as shown in FIG. 76, “warning information”, “route guidance information”, “road traffic information”, “facility guidance information”, “highway guidance information”, “current position information” , “Sound quality” and “Volume” are varied according to “travel environment”, “travel time”, “travel time zone”, and “travel region”. Generally speaking, the type of information that calls attention to the driver is set to a voice with a sense of tension or a tone of indication, and conversely, in a driving scene that should not give the driver a sense of tension. For example, it is generated in a guide tone with a voice of a “gentle” female voice.
[0134]
This embodimentSystem central
<Eleventh Embodiment> ... Use of output destination media properly
In addition to having various media as a source of multimedia information, the navigation system has various means (providing means) such as a head-up display, a
[0135]
In the eleventh embodiment, the first to tenth embodiments regulate the provision of audio information to the driver by considering the suitability of the provision or the priority order information of the provision. However, in this embodiment, information provision is regulated as a result by using different output destination media.
FIG. 82 shows the “emergency level” at that time determined by the driving state and conditions, and the “priority rank RK” (which is the same as the rank in the first embodiment) that the information itself has. Shows a logical table (voice information output destination determination table) for determining the output destination of the voice information. The eleventh embodiment is also characterized in that the decision logic can be selected by the user. FIG. 81 is a table (referred to as “menu setting permission definition table”) that defines a range in which a user can participate in decision logic.
[0136]
In the menu setting permission definition table of FIG. 81, areas that can be defined by the user are shown separately from areas that cannot be defined by shading for convenience.
Here, the “emergency level” in the eleventh embodiment will be described.
In the eleventh embodiment, the “emergency level” is determined according to the driving state and the driving condition, that is, based on the event that exists independently from the “information” itself, as in the other embodiments. It is an index that represents the urgency of In this embodiment, the degree of urgency is defined as in the table of FIG. The smaller the value of urgency, the higher the urgency, and the larger the value, the lower the value. Note that many of the states in FIG. 83 can be determined by the various sensors shown in FIG. The “forecast that the road curvature is large” on the first line can be determined based on information obtained from the NAVI controller, for example, information that the next is approaching the curve.
[0137]
In the table of FIG. 82, x indicates that no information is provided. The feature of the “output destination determination table” in FIG. 83 is that the lower the value of rank RK, which is the urgency level of the information itself, and the higher the urgency level (vertical axis of the table) as the travel condition, Since the necessity for provision is reduced, it is not displayed on the display as audio information. For example, when rank = E and urgency level = 1, no output is made. Further, the higher the rank RK value of the information itself and the lower the degree of urgency as the driving condition, the greater the significance of providing the information. Therefore, options for providing such information are expanding. For example, when rank = A or B and urgency = 4, the information can be output as audio information or on a display (including
[0138]
Thus, according to the eleventh embodiment, by selecting the output destination of the voice information according to the driving condition (including not outputting), the appropriate information is transmitted to the driver at an appropriate timing without excess or deficiency.
<Twelfth embodiment> ... Determination of provision sequence by switch
First implementation described aboveForm-11th implementationFormIn this navigation system, the order in which information is provided is determined by the generation order of the information and the order of priority between the information. As such, the order in which information is provided is independent of the order in which the information occurred and is therefore difficult to predict.
[0139]
In the twelfth embodiment, when a plurality of pieces of information are generated simultaneously or continuously, the user can control the order of providing the information. 12th implementationFormFor the sake of convenience, the navigation system according to the embodiment includes “warning information”, “road guidance information”, “facility guidance information”, “highway information”, “road traffic information”, and “current position information” as information types. Shall occur. These pieces of information become “guidance information” for the driver. The detection of the environmental condition that is the basis of these pieces of information can be detected by various environmental detection means exemplified in FIG.
[0140]
In the example of FIGS. 85 and 86, when a warning that the remaining fuel is low has occurred, the driver wants a series of guidance information for dealing with the warning. FIG. 86 shows an example of the guidance information. In other words, it is preferable for the user that the guidance information is pierced by a logic composed of a series of sequences for dealing with a series of warnings. That is, it takes time to understand why the facility guidance information is provided if the guidance information to the facility comes before the warning information. It is terrible to be forced to consider this reason while driving. In the navigation system of the twelfth embodiment, the provision order of various information is specified by the user interface shown in FIG. In the example of FIG. 87, the provision order is determined by the user setting the priority order. Therefore, the designation of the provision order of the twelfth embodiment by the user can be applied to the various navigation systems of the first to eleventh embodiments. This is because the various navigation systems of the first to eleventh embodiments also use “priority”. In the navigation systems of the first to eleventh embodiments, the priority order is determined by the importance level or the urgency level of information. In the twelfth embodiment, one story is generated by a series of various information provision sequences. It is decided to be born.
[0141]
FIG. 87 shows a user interface for setting the priority for providing guidance information. In the figure, “automatic mode” means that the user uses an order determined in advance by the system. If the "I'll decide for myself" mode is selected, the user can enter the order. In the example of FIG. 87, the order of “current position information” → “route guidance information” → “road traffic information” → “warning information” → “highway guidance information” → “facility guidance information” is set.
[0142]
In the twelfth embodiment, “warning information”, “road guidance information”, “facility guidance information”, “highway information”, “road traffic information”, and “current location information” are generated or required as information types. Presence / absence is determined by using various sensors shown in FIG.
A: The presence or absence of “warning information” is determined by judging the existence of the warning information itself,
B: The presence or absence of “road guidance information” depends on whether route guidance is being performed.
C: The presence or absence of “facility guidance information” is determined by determining whether the vehicle is traveling near the destination or waypoint while the route guidance is being performed.
D: The presence or absence of “highway information” depends on whether or not you are driving on the highway.
E: The presence or absence of “road traffic information” is determined by determining whether there is a traffic jam or an accident in front of the road.
F: The presence / absence of “current position information” can be detected by determining whether or not the vehicle is currently traveling in an area where the traveling frequency is low.
[0143]
The flowchart in FIG. 88 shows the control procedure of the twelfth embodiment. Since this control procedure outputs priority order PR, if the control of the twelfth embodiment is applied to the control of the first to eleventh embodiments, for example, the control procedure of the first embodiment. It is appropriate to add between step S302 and step S304.
[0144]
That is, the above six determinations A to F are performed in steps S2502 to S2512. The determination result is expressed as 6-bit data (ABCDEF = xxxxxxxx). If the value of this data is “0”, that is, if all the bits are OFF, there is no need to output guidance information, so the voice guidance is deactivated in step S2520.
[0145]
On the other hand, if any of the six bits is ON, that is, if any of the guidance information is necessary, NO is determined in step S2514, so step S2516 is performed. Confirms that the voice request SW (see FIG. 80) is input, and generates a priority order according to the user setting of FIG.
[0146]
FIG. 84 shows that the provision order of six types of guidance information is set to 21 orders by a 6-bit (ABCDEF) pattern (21 types). For example, when ABCDEF = 1000011, that is, when “warning information”, “road traffic information”, and “current position information” are generated, these three pieces of information have priority levels. Since the values are given as “4”, “3”, and “1”, respectively, the provision order is “1”, “3”, and “2” as shown in FIG.
[0147]
As described above, in the navigation system of the twelfth embodiment, the user can set the information provision order in accordance with his / her purpose. Accordingly, when a plurality of pieces of information are provided in sequence order, the order is based on the logic assembled by the user himself, so that it is extremely easy to understand the plurality of pieces of guidance information. That is, the navigation system has a high degree of completion and is easy to use.
<Thirteenth embodiment> ... Providing information during idols between songs
In the thirteenth embodiment, in a music program or the like, information is provided in a gap between songs in order to prevent a sound from being interrupted between songs and causing the driver to feel uncomfortable.
[0148]
FIG. 89 is a flowchart of the control procedure of this embodiment.
In step S3000, it is confirmed that an information input queue has occurred. In step S3002, it is checked whether the audio is being used. If not in use, information is provided in step S3014.
If the audio is not in use, the priority of the generated information is checked in step S3004.
[0149]
Steps S3008 to S3012 are control procedures for temporarily stopping audio and providing information during that time. That is, the audio is paused in step S3008, information is provided in step S3010, and the audio is restarted in step S3012.
The control for providing information in the gap between the audios is when the high priority information is found in step S3004 or in the idling time between songs in step S3006.
[0150]
In particular, during idling between songs, although the audio is busy, the audio is paused, so that information can be provided.
It should be noted that the information to be provided between songs must be information with a certain priority. This is because once a song starts, that type of information will not be provided until the end of the song. Therefore, using the various user interfaces of the above-described embodiment (for example, the interface of FIG. 87 of the twelfth embodiment), the information to be inserted into the audio (information that becomes NO in step S3004) and the information inserted between the songs ( It is important to set in advance about the information (YES in step S3004).
[0151]
【The invention's effect】
As explained above,According to the present invention, important information such as emergency information can be provided at an appropriate timing.
[Brief description of the drawings]
FIG. 1 is a view of main parts of a multimedia navigation system to which the present invention is applied as viewed from the inside of a vehicle.
FIG. 2 is a diagram showing connection of the navigation system of FIG. 1;
3 is a diagram showing connection of the navigation system shown in FIGS. 1 and 2. FIG.
FIG. 4 is a diagram showing various types of media connected to the navigation system of FIG. 13;
FIG. 5 is a view for explaining names of maps used in the navigation system according to the embodiment to which the present invention is applied, and items referred to in each map;
FIG. 6 is a diagram showing a table for managing attribute information (priority order, rank value, storage capacity, etc.) assigned to various types of information used in the navigation system of all the embodiments of the present invention.
FIG. 7 is a diagram showing an aspect of dividing an information storage area in the navigation system.
FIG. 8 is a diagram showing an aspect of dividing an information storage area in the navigation system.
FIG. 9 is a diagram showing a configuration of an input information queue table used in the navigation system according to all the embodiments of the present invention.
FIG. 10 is a flowchart for a main routine of a control procedure of the navigation system according to the first embodiment.
FIG. 11 is a diagram showing a configuration of an output timing level LVL setting table used in the navigation system of the first embodiment.
FIG. 12 is a diagram showing a mode of control operation according to the value of the level LVL.
FIG. 13 is a table showing how a lower limit RKLMT of ranks for which information provision is permitted changes due to a difference in traveling state;
FIG. 14 is a flowchart of an “information input interrupt” routine of the control procedure of the navigation system of the first embodiment.
FIG. 15 is a flowchart of a “map correction” routine of the control procedure of the navigation system according to the first embodiment.
FIG. 16 is a flowchart of a “map selection” routine of the control procedure of the navigation system according to the first embodiment.
FIG. 17 is a flowchart of an “information provision control” routine of the control procedure of the navigation system of the first embodiment.
FIG. 18 is a flowchart of a “processing according to priority” routine of the control procedure of the navigation system of the first embodiment.
FIG. 19 is a flowchart of an “output” routine of a control procedure of the navigation system according to the first embodiment.
FIG. 20 is a flowchart of an “output completion” routine of the control procedure of the navigation system of the first embodiment.
FIG. 21 is a table showing a definition of a variable “limit number of times LMT” used in the control of the navigation system according to the first embodiment.
FIG. 22 is a flowchart of the “number of times check” routine of the control procedure of the navigation system of the first embodiment.
FIG. 23 is a flowchart of an “erase” routine of the control procedure of the navigation system according to the first embodiment.
24 is a view showing an example of the operation of the “number of times check routine” in FIG. 22; .
FIG. 25 is a diagram showing a configuration of a switch used for the system of the navigation system according to the first embodiment to indicate two options when voice information is not output as voice.
FIG. 26 is a diagram showing an example of a control operation of the navigation system according to the first embodiment.
FIG. 27 is a diagram showing an example of a control operation of the navigation system according to the first embodiment.
FIG. 28 is a diagram illustrating an example of a control operation of the navigation system according to the first embodiment.
FIG. 29 is a diagram showing a configuration of a table defining travel environment-action classification used in the navigation system according to the second embodiment of the present invention.
FIG. 30 is a diagram for explaining different operations depending on the value of the driving environment-action classification CL used in the navigation system according to the second embodiment of the present invention.
FIG. 31 is a flowchart of a “processing according to priority” routine of the control procedure of the navigation system of the second embodiment.
FIG. 32 is a flowchart of an “exception information processing” subroutine unique to the navigation system of the second embodiment.
FIG. 33 is a timing chart for explaining the operation of the navigation system of the second embodiment.
FIG. 34 is a timing chart for explaining the operation of the navigation system of the second embodiment.
FIG. 35 is a diagram showing a configuration of a classification table used in the navigation system of the third embodiment.
FIG. 36 is a diagram for explaining the operation of the navigation system of the third embodiment.
FIG. 37 is a flowchart showing a main routine for the control procedure of the navigation system of the third embodiment.
FIG. 38 is a detailed flowchart of an “information provision control” routine in the flowchart of FIG. 37;
FIG. 39 is a detailed flowchart of an “information input” routine in the flowchart of FIG. 37;
FIG. 40 is a flowchart of the “map correction” routine of the control procedure of the navigation system of the third embodiment.
FIG. 41 is a flowchart of a “map selection” routine of the control procedure of the navigation system of the third embodiment.
FIG. 42 is a flowchart of a “processing according to priority” routine of the control procedure of the navigation system of the third embodiment.
FIG. 43 is a flowchart of an “output” routine of the control procedure of the navigation system of the third embodiment.
FIG. 44 is a flowchart of an “output completion” routine of the control procedure of the navigation system of the third embodiment.
FIG. 45 is a flowchart of the “erase” routine of the control procedure of the navigation system of the third embodiment.
FIG. 46 is a flowchart of a “number of times check” routine of the control procedure of the navigation system of the third embodiment.
47 is a diagram showing an example of the operation of “exception information processing” in FIG. 22; .
FIG. 48 is a diagram showing a CL table used for controlling a third modification (modification with respect to the third embodiment).
FIG. 49 is a diagram showing a CL table used for controlling a third modification (modification with respect to the third embodiment).
FIG. 50 is a diagram showing a table used for controlling a fourth modification (modification with respect to the third embodiment).
FIG. 51 is a partial flowchart of a control procedure used for control of a fourth modified example (modified with respect to the third embodiment).
FIG. 52 is a view showing a table used for controlling a fourth modification (modification with respect to the third embodiment).
FIG. 53 is a view showing a table used for control of the navigation system of the fourth embodiment.
FIG. 54 is a partial flowchart of the control procedure of the navigation system of the fifth modified example (modified example of the fourth embodiment).
FIG. 55 is a diagram showing a configuration of a table used in the navigation system according to the fifth embodiment.
FIG. 56 is a diagram showing a configuration of a table used in the navigation system of the fifth embodiment.
FIG. 57 is a diagram showing a configuration of a table used in a navigation system of a fifth modified example (modified example with respect to the fifth embodiment).
FIG. 58 is a flowchart showing a part of the control procedure of the navigation system of the fifth embodiment.
FIG. 59 is a diagram showing a user interface screen of the navigation system of the sixth embodiment.
FIG. 60 is a diagram showing a screen of the user interface of the navigation system of the sixth embodiment.
FIG. 61 is a view showing a table used for the control procedure of the navigation system of the seventh embodiment.
FIG. 62 is a flowchart showing a part of the control procedure of the navigation system of the seventh embodiment.
FIG. 63 is a view showing a table used for control of a seventh modification (modification to the seventh embodiment).
FIG. 64 is a flowchart showing a part of the control procedure of a seventh modified example (modified example with respect to the seventh embodiment);
FIG. 65 is a diagram showing a display screen of a user interface used in the navigation system of the eighth embodiment.
FIG. 66 is a flowchart showing a part of the control procedure of the navigation system of the eighth embodiment.
FIG. 67 is a diagram showing a table used in the control of the first modified example (modified example of the first embodiment).
FIG. 68 is a flowchart showing a part of the control procedure of the first modified example (modified example of the first embodiment).
FIG. 69 is a diagram showing a table used in the control of a second modification (modification to the second embodiment).
FIG. 70 is a timing chart showing the operation of the navigation system of the ninth embodiment.
FIG. 71A is a graph for explaining the calculation principle of the time interval in the navigation system of the ninth embodiment.
FIG. 71B is a graph for explaining the calculation principle of the time interval in the navigation system of the ninth embodiment.
FIG. 71C is a graph for explaining the calculation principle of the time interval in the navigation system of the ninth embodiment.
FIG. 71D is a graph for explaining the calculation principle of the time interval in the navigation system of the ninth embodiment.
FIG. 71E is a graph for explaining the calculation principle of the time interval in the navigation system of the ninth embodiment.
FIG. 71F is a graph for explaining the calculation principle of the time interval in the navigation system of the ninth embodiment.
FIG. 72 is a flowchart showing a part of the control procedure of the navigation system of the ninth embodiment.
FIG. 73 is a flowchart showing a part of the control procedure of the navigation system of the ninth embodiment.
FIG. 74 is a view for explaining the principle of a modification of the control procedure of the ninth embodiment.
FIG. 75 is a diagram showing a user interface screen of the navigation system of the tenth embodiment.
FIG. 76 shows a table used for control of the navigation system of the tenth embodiment.
FIG. 77 is a flowchart of an example in which the control of the sixth embodiment is partially modified.
FIG. 78 is a flowchart of an example in which the control of the seventh embodiment is partially modified.
FIG. 79 is a diagram showing a user interface used in all the embodiments.
FIG. 80 is a diagram showing a user interface used in all the embodiments.
FIG. 81 is a diagram of a table used for control of the navigation system of the eleventh embodiment.
FIG. 82 is a table used for controlling the navigation system of the eleventh embodiment.
FIG. 83 is a diagram of a table used for control of the navigation system of the eleventh embodiment.
FIG. 84 is a diagram of a table used for control of the navigation system of the twelfth embodiment.
FIG. 85 is a diagram of a table used for control of the navigation system of the twelfth embodiment.
FIG. 86 is a diagram of a table used for control of the navigation system of the twelfth embodiment.
FIG. 87 is a diagram showing a user interface of the navigation system of the twelfth embodiment.
FIG. 88 is a flowchart showing a part of the control procedure of the twelfth embodiment.
FIG. 89 is a flowchart showing the control procedure of the thirteenth embodiment.
[Explanation of symbols]
1 body
2 Central control unit
3 In-vehicle LAN unit
4 RAM card drive
5 Data drive
6 Voice guidance speakers
7 microphone
8 display
9 Mobile phone
10 Operation switch
11 GPS antenna
12 FM antenna
13 Telephone antenna
14 radio beacon antenna
15 Optical beacon antenna
16 FM tuner
17 Navigation controller
18 Beacon signal receiver
19 CD-ROM changer
Claims (7)
所定の最優先情報が入力されたか否かを判定する手段と、
前記最優先情報が入力された場合に、他の情報の提供を規制し前記最優先情報を提供する割込手段と、
前記自動車が走行中の走行路の種類を検出する検出手段と、
を具備し、
前記割込手段により提供が規制された前記他の情報は、前記検出手段が検出した現在の走行路の種類に応じて再提供されるか否かが前記割り込み手段により前記他の情報の提供を規制した際に決定され、再提供される場合は前記最優先情報の提供の終了後に再提供されることを特徴とするナビゲーション装置。A navigation device that provides information to a vehicle occupant at a predetermined timing,
Means for determining whether or not predetermined top priority information has been input;
An interrupt means for restricting provision of other information and providing the highest priority information when the highest priority information is input ;
Detecting means for detecting the type of travel path on which the automobile is traveling;
Comprising
Whether or not the other information whose provision is restricted by the interrupting means is re-provided according to the type of the current traveling path detected by the detecting means is provided by the interrupting means. The navigation apparatus according to claim 1, wherein the navigation apparatus is re-provided after the provision of the top-priority information when it is determined and re-provided upon restriction .
所定の最優先情報が入力されたか否かを判定する手段と、
前記最優先情報が入力された場合に、他の情報の提供を規制し前記最優先情報を提供する割込手段と、
前記自動車の走行場所を検出する検出手段と、
を具備し、
前記割込手段により提供が規制された前記他の情報は、前記検出手段が検出した現在の走行場所に応じて再提供されるか否かが前記割り込み手段により前記他の情報の提供を規制した際に決定され、再提供される場合は前記最優先情報の提供の終了後に再提供されることを特徴とするナビゲーション装置。A navigation device that provides information to a vehicle occupant at a predetermined timing,
Means for determining whether or not predetermined top priority information has been input;
An interrupt means for restricting provision of other information and providing the highest priority information when the highest priority information is input ;
Detection means for detecting the travel location of the automobile;
Comprising
Whether the other information whose provision is restricted by the interrupting means is re-provided according to the current travel location detected by the detecting means restricts the provision of the other information by the interrupting means. When the navigation apparatus is determined and re-provided, the navigation apparatus is re-provided after the provision of the highest priority information.
所定の最優先情報が入力されたか否かを判定する手段と、
前記最優先情報が入力された場合に、他の情報の提供を規制し前記最優先情報を提供する割込手段と、
前記自動車の走行地点の天候を検出する検出手段と、
を具備し、
前記割込手段により提供が規制された前記他の情報は、前記検出手段が検出した現在の天候に応じて再提供されるか否かが前記割り込み手段により前記他の情報の提供を規制した際に決定され、再提供される場合は前記最優先情報の提供の終了後に再提供されることを特徴とするナビゲーション装置。A navigation device that provides information to a vehicle occupant at a predetermined timing,
Means for determining whether or not predetermined top priority information has been input;
An interrupt means for restricting provision of other information and providing the highest priority information when the highest priority information is input ;
Detecting means for detecting the weather at the travel point of the vehicle;
Comprising
When the other information whose provision is restricted by the interrupting means is re-provided according to the current weather detected by the detecting means , the provision of the other information is restricted by the interrupting means The navigation apparatus according to claim 1, wherein the navigation apparatus is provided again after the provision of the highest priority information.
所定の最優先情報が入力されたか否かを判定する手段と、
前記最優先情報が入力された場合に、他の情報の提供を規制し前記最優先情報を提供する割込手段と、
前記自動車の車速を検出する検出手段と、
を具備し、
前記割込手段により提供が規制された前記他の情報は、前記検出手段が検出した車速が中低速か高速かに応じて再提供されるか否かが前記割り込み手段により前記他の情報の提供を規制した際に決定され、再提供される場合は前記最優先情報の提供の終了後に再提供されることを特徴とするナビゲーション装置。A navigation device that provides information to a vehicle occupant at a predetermined timing,
Means for determining whether or not predetermined top priority information has been input;
An interrupt means for restricting provision of other information and providing the highest priority information when the highest priority information is input ;
Detecting means for detecting the vehicle speed of the automobile;
Comprising
Whether or not the other information whose provision is restricted by the interrupting means is re-provided according to whether the vehicle speed detected by the detecting means is medium or low, is provided by the interrupting means. The navigation apparatus according to claim 1, wherein the navigation apparatus is determined and provided again after the provision of the highest priority information.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP27899896A JP3923572B2 (en) | 1996-09-30 | 1996-09-30 | Navigation device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP27899896A JP3923572B2 (en) | 1996-09-30 | 1996-09-30 | Navigation device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH10104005A JPH10104005A (en) | 1998-04-24 |
| JP3923572B2 true JP3923572B2 (en) | 2007-06-06 |
Family
ID=17604985
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP27899896A Expired - Fee Related JP3923572B2 (en) | 1996-09-30 | 1996-09-30 | Navigation device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3923572B2 (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2437231A1 (en) | 2010-09-30 | 2012-04-04 | Honda Motor Co., Ltd. | Other vehicle information providing device |
| DE102011076298B4 (en) * | 2010-05-24 | 2013-08-14 | Honda Motor Co., Ltd. | Information providing device and information providing method |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3703045B2 (en) * | 1996-09-30 | 2005-10-05 | マツダ株式会社 | Navigation device |
| JPH10104000A (en) * | 1996-09-30 | 1998-04-24 | Mazda Motor Corp | Navigation apparatus |
| JP2001272246A (en) * | 2000-03-23 | 2001-10-05 | Honda Motor Co Ltd | Road traffic information notification apparatus |
| JP3806611B2 (en) * | 2001-05-16 | 2006-08-09 | 株式会社ケンウッド | Navigation device, voice providing method and program |
| EP1554645A2 (en) * | 2002-06-13 | 2005-07-20 | Panasonic Automotive Systems Company Of America | Interface for a multifunctional system |
| WO2004004308A2 (en) * | 2002-06-27 | 2004-01-08 | Thomson Licensing S.A. | Event masking for television signal receiver having an emergency alert function |
| JP3735359B2 (en) * | 2003-09-12 | 2006-01-18 | コナミ株式会社 | Video game program, video game apparatus, and video game method |
| KR101087483B1 (en) * | 2004-11-04 | 2011-11-28 | 엘지전자 주식회사 | Method and apparatus for controlling output of audio signal for route guidance in navigation system |
| WO2009047874A1 (en) | 2007-10-12 | 2009-04-16 | Mitsubishi Electric Corporation | On-vehicle information providing device |
| JP2009151720A (en) * | 2007-12-21 | 2009-07-09 | Kenwood Corp | System, apparatus, method and program for providing road traffic information |
| JP2009151716A (en) * | 2007-12-21 | 2009-07-09 | Kenwood Corp | Road traffic information providing system, road traffic information providing device, and road traffic information providing method and program |
| JP5245392B2 (en) | 2007-12-21 | 2013-07-24 | 株式会社Jvcケンウッド | OBE, information output method and information providing system |
| JP5034997B2 (en) * | 2008-02-08 | 2012-09-26 | トヨタ自動車株式会社 | Navigation device and display information mediation method |
| JP5484750B2 (en) * | 2009-02-19 | 2014-05-07 | 富士通テン株式会社 | In-vehicle system and portable terminal device |
| JP2011095993A (en) * | 2009-10-29 | 2011-05-12 | Pioneer Electronic Corp | Information display device, information display method and information display program |
| US20140143802A1 (en) * | 2011-05-19 | 2014-05-22 | Japan Broadcasting Corporation | Signal processing device and program |
-
1996
- 1996-09-30 JP JP27899896A patent/JP3923572B2/en not_active Expired - Fee Related
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102011076298B4 (en) * | 2010-05-24 | 2013-08-14 | Honda Motor Co., Ltd. | Information providing device and information providing method |
| US8977550B2 (en) | 2010-05-24 | 2015-03-10 | Honda Motor Co., Ltd. | Information providing apparatus and information providing method |
| EP2437231A1 (en) | 2010-09-30 | 2012-04-04 | Honda Motor Co., Ltd. | Other vehicle information providing device |
| US8649964B2 (en) | 2010-09-30 | 2014-02-11 | Honda Motor Co., Ltd. | Other vehicle information providing device |
Also Published As
| Publication number | Publication date |
|---|---|
| JPH10104005A (en) | 1998-04-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3923572B2 (en) | Navigation device | |
| JP3703050B2 (en) | Navigation device | |
| KR19980025125A (en) | Navigation device | |
| JP4091077B2 (en) | Content distribution apparatus and content reproduction apparatus | |
| JP3738923B2 (en) | Navigation device | |
| JP3703043B2 (en) | Navigation device | |
| US20080221753A1 (en) | Method For Selecting Audio Content To Be Played In A Vehicle | |
| JP3703051B2 (en) | Navigation device | |
| JP3824273B2 (en) | Moving history storage device and method thereof | |
| JP3703046B2 (en) | Navigation device | |
| JP2003104136A (en) | Device for collecting driver information | |
| JP3703045B2 (en) | Navigation device | |
| JP3703048B2 (en) | Navigation device | |
| JP3703052B2 (en) | Navigation device | |
| JP3703047B2 (en) | Navigation device | |
| JPH10105055A (en) | Navigator | |
| JP3703049B2 (en) | Navigation device | |
| JPH10104011A (en) | Navigation apparatus | |
| JP3661177B2 (en) | Navigation device | |
| JPH10104000A (en) | Navigation apparatus | |
| US6680670B2 (en) | On-vehicle electronic apparatus and information notification method | |
| JP2007127599A (en) | Navigation system | |
| JP3641985B2 (en) | Audio system for vehicles | |
| JP5050767B2 (en) | Information providing apparatus, information providing method, and program | |
| JP4249762B2 (en) | Method and apparatus for providing traffic news to vehicles on demand |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20050120 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20050301 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050421 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20050701 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050826 |
|
| A911 | Transfer of reconsideration by examiner before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20050831 |
|
| A912 | Removal of reconsideration by examiner before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20051014 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070105 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20070222 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100302 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110302 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120302 Year of fee payment: 5 |
|
| LAPS | Cancellation because of no payment of annual fees |