JP3585237B2 - ワークサイトで使用される圧縮成形用機械の操作のための方法と装置 - Google Patents
ワークサイトで使用される圧縮成形用機械の操作のための方法と装置 Download PDFInfo
- Publication number
- JP3585237B2 JP3585237B2 JP51618795A JP51618795A JP3585237B2 JP 3585237 B2 JP3585237 B2 JP 3585237B2 JP 51618795 A JP51618795 A JP 51618795A JP 51618795 A JP51618795 A JP 51618795A JP 3585237 B2 JP3585237 B2 JP 3585237B2
- Authority
- JP
- Japan
- Prior art keywords
- site
- compression molding
- molding machine
- model
- site model
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000748 compression moulding Methods 0.000 title claims description 328
- 238000000034 method Methods 0.000 title claims description 47
- 238000001514 detection method Methods 0.000 claims description 45
- 230000006835 compression Effects 0.000 claims description 42
- 238000007906 compression Methods 0.000 claims description 42
- 239000000463 material Substances 0.000 claims description 32
- 238000013500 data storage Methods 0.000 claims description 14
- 238000000465 moulding Methods 0.000 claims description 14
- 239000012778 molding material Substances 0.000 claims description 5
- 238000012544 monitoring process Methods 0.000 claims description 5
- 238000004891 communication Methods 0.000 claims description 4
- 239000011159 matrix material Substances 0.000 claims description 3
- 230000003068 static effect Effects 0.000 claims description 3
- 230000004044 response Effects 0.000 claims description 2
- 238000005070 sampling Methods 0.000 description 13
- 238000012545 processing Methods 0.000 description 11
- 238000005259 measurement Methods 0.000 description 10
- 239000010813 municipal solid waste Substances 0.000 description 10
- 238000012937 correction Methods 0.000 description 9
- 238000010586 diagram Methods 0.000 description 8
- 230000008859 change Effects 0.000 description 7
- 239000010426 asphalt Substances 0.000 description 5
- 238000010276 construction Methods 0.000 description 4
- 230000015654 memory Effects 0.000 description 4
- 230000008569 process Effects 0.000 description 4
- 230000000007 visual effect Effects 0.000 description 4
- 239000002699 waste material Substances 0.000 description 4
- 230000007246 mechanism Effects 0.000 description 3
- 238000004040 coloring Methods 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 230000012447 hatching Effects 0.000 description 2
- 238000000691 measurement method Methods 0.000 description 2
- 239000002994 raw material Substances 0.000 description 2
- 230000035807 sensation Effects 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000013507 mapping Methods 0.000 description 1
- 239000003550 marker Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000010845 search algorithm Methods 0.000 description 1
- 230000001953 sensory effect Effects 0.000 description 1
- 239000002689 soil Substances 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 238000012876 topography Methods 0.000 description 1
Images
















Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0011—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement
- G05D1/0044—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement by providing the operator with a computer generated representation of the environment of the vehicle, e.g. virtual reality, maps
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01C—CONSTRUCTION OF, OR SURFACES FOR, ROADS, SPORTS GROUNDS, OR THE LIKE; MACHINES OR AUXILIARY TOOLS FOR CONSTRUCTION OR REPAIR
- E01C19/00—Machines, tools or auxiliary devices for preparing or distributing paving materials, for working the placed materials, or for forming, consolidating, or finishing the paving
- E01C19/004—Devices for guiding or controlling the machines along a predetermined path
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2025—Particular purposes of control systems not otherwise provided for
- E02F9/2045—Guiding machines along a predetermined path
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/26—Indicating devices
Landscapes
- Engineering & Computer Science (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Remote Sensing (AREA)
- Mining & Mineral Resources (AREA)
- Radar, Positioning & Navigation (AREA)
- Aviation & Aerospace Engineering (AREA)
- Architecture (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
- Road Paving Machines (AREA)
- Forklifts And Lifting Vehicles (AREA)
- Conveying And Assembling Of Building Elements In Situ (AREA)
- Soil Working Implements (AREA)
- Pit Excavations, Shoring, Fill Or Stabilisation Of Slopes (AREA)
Description
本発明は、ワークサイトの表面を圧縮成形する(compacting)ための機械の操作に係わり、特に、その機械により目標値に向かって変更されるようなワークサイトの圧縮成形の程度をまとめて表すデジタルデータの生成と使用に関する。この明細書において使用されている“圧縮成形用機械”及び他の類似した語は、ゴミ処理地、地面及びアルファルト用の圧縮成形機のような車輪を備えた自走式移動機械を意味している。なお、この機械は、(1)フレーム上にエンジンのような原動機を備えてワークサイト上を移動し、このエンジンがフレームを支持している車輪を駆動し、更に(2)車体の支持及び圧縮成形用ツールとして機能する車輪又はローラーのフレームを設けた結果ワークサイト上を圧縮成形する能力を有する。
背景技術
優れた且つ強力な圧縮成形用機械が開発されているが、ゴミ処理地、建設現場道路のようなワークサイトでゴミ、地面又はアスファルトのような材料を適当に圧縮成形する場合には、依然として時間がかかり大きな労力が必要であった。例えば、ゴミ処理地のゴミや廃棄物のような圧縮成形されるべき材料は、典型的には、非圧縮状態でサイト上に広がっているため、圧縮成形の程度が所定の目標値となるまで、圧縮成形機により繰り返し横切られなくてはならない。通常の圧縮成形機は、1以上の重い圧縮成形用の車輪又はローラーを備えており、それらの経路内の材料を圧縮成形している。材料が目標の圧縮成形状態に達したか否かは、圧縮成形用車輪がその領域上を通過した回数又は未圧縮形成のレベルからの標高の変化により判定される。
今日まで、圧縮成形作業は、機械のオペレータ及び監督者の直観的なベースによりほとんどモニターされ且つ制御されており、更に、圧縮成形の操作及びサイトの全体の地形の測定とモニターは、静的に実測と物理的なマーカーを用いて行われている。例えば、目標値に対してサイトの材料を圧縮形成するために必要な通過回数を経験的に決定した後、オペレータは、サイト上を圧縮成形機を前後方向に駆動させ、圧縮成形の程度が目標値に到達したときに、記憶、感覚、目視による観察及び色付きの支柱や同様な物理的目印により、測定を行う。このようなプロセスは、サイトに新たな未圧縮形成材料が頻繁に追加された場合には、複雑となる。新しい材料が、サイト上に追加される度に、その領域のその前の圧縮成形作業は消され、オペレータは、圧縮形成されたその領域で作業を開始しなければならない。オペレータが圧縮成形作業中に、新しい材料が追加される前にサイトが均一に圧縮成形されていなかったり、材料がサイトの一部にのみ追加されたような場合には、圧縮成形作業が均一に且つ効果的にモニターされて終了することが困難となる。
未圧縮成形材料とサイトが、圧縮成形の目標値と目標となるサイトの地形とどの程度一致しているかをより正確に知るために、監督者や実測作業者が、ときどき、圧縮成形及び作業されたサイトの量を確かめ、その後、サイトの支柱や目印及びサイトモデルをマニュアルにより更新する。圧縮成形機のオペレータや監督者は、これらの確認を行って時間の間では、作業のリアルタイムの進展状況をモニターし測定する真の正確な方法を有さないのである。
従って、最も熟練し経験のあるオペレータでさえも、広いランドサイトを圧縮成形する際には、効率の上で限度があり、効率的に行うことが困難であった。このような困難性は、サイトの圧縮成形作業においてリアルタイムの進展が成されているかについての大規模且つ詳細な情報がないことにその一部が起因している。
発明の開示
本発明は、ワークサイト上の材料を目標値に向けて正確且つ効率的に圧縮成形するために、圧縮成形用機械を操作する際の長く存在していた問題を解決するようなしたものである。本発明は、オペレータにサイト上の物理的なマーカーで示す必要性がなく、燃料補給のような必要性によりのみにより作業が中断し、さらに、作業者に最低限の必要性しかないような圧縮成形作業を達成する。
一般的に、本発明は、デジタルデータの格納/検索/処理の設備により達成される。ここで、この設備自体は、圧縮成形用機械に搭載されているか又は機械から離れて配置されており、また、サイトの圧縮成形の目標と共に与えられたいかなる時刻のサイトのデジタルモデルを格納し、実際に生成し、修正するために、例えば、無線リンクにより圧縮成形用機械に接続されている。
本発明は、圧縮成形用機械即ちその圧縮形成用の車輪やローラーの3次元空間における正確な位置を、例えば、機械がサイト上を移動し圧縮成形する際に、そのデジタルモデルを機械がサイトを横切るときに1地点毎にまたリアルタイムで更新するために、リアルタイムで正確に判定することができる機構を更に有する。後述するように、本発明の好適な実施形態は、目標物を3次元の空間においてセンチメートルの精度で正確に見つけ出すことができる位相差GPS(世界的位置検出用システム)(global positioning system)受信システムを使用している。
本発明は、目標サイトモデルを連続的に更新される実サイトモデルと比較し且つ実サイトモデルを目標サイトモデルち一致させるためにサイト上の多数の座標の各々で必要な圧縮形成の程度を表す信号を生成する手段を更に有する。これらの信号は、その瞬間において、圧縮成形用機械上で又は機械から離れた位置で、サイト全体の少なくともその実体的部分に関する情報を伝達する座標軸内且つリアルタイムで、機械の実際の進展状況に関してオペレータに知らせるためにリアルタイム表示を提供する。後述する他の実施形態において、目標サイトモデルと実サイトモデルとの差異を表す信号が、機械自身のリアルタイム自動制御装置即ちその一部分又はその両者に対して適用される。
好適な実施形態において、位置判定用機構であるシステムの少なくとも一部分は、圧縮形成用機械がサイトを横切るときにその圧縮成形用機械上で搬送される。
本発明の他の観点によれば、本発明は、移動式サイト圧縮成形機械の作業を指示する方法であって、この方法が、サイトの圧縮成形の程度の目標値を表す第1サイトモデルとサイトの圧縮成形の程度の実際の値を表す第2サイトモデルとを生成してデジタルデータ格納及び検索手段に格納する工程と、その後、圧縮成形機械がサイトを横切って圧縮成形するときにこの機械の3次元空間内の瞬間の位置をリアルタイムで表すデジタル信号を生成する工程と、第1モデルと更新された第2モデルとの差異を判定する工程と、更新された第2モデル第1モデルと一致するようにこの差異により機械の操作を指示する工程と、を含む。
一実施形態において、機械の操作を支持する工程は、ワークサイトに関するその圧縮成形用機械の瞬間位置、サイトの圧縮成形の実際の程度を第1モデルに一致させるために必要な変更、第1モデルの実現に向かって成されている進展をオペレータに表示することにより、実行される。
他の実施形態において、機械の操作を支持する工程は、機械の動作位置や方向を制御するための電子式油圧アクチュエータを介した動作により、全自動又は半自動により、実行される。
一実施形態において、位置判定用手段の少なくとも一部は、機械がサイトを横切るときに圧縮成形用機械自身上で搬送される。以降でより詳細に説明するように、本発明の装置及び方法は、種々の形態により達成され得る。デジタルデータ格納及び検索設備は、更新及び差分手段と同様に、一体的な包括的オンボード機械システムの一部として機械に搭載され搬送されるものでもよい。または、これらの手段は、ビジュアルディスプレイ信号又は機械への自動制御信号を発信し且つ作業中に機械からの位置及びサイト情報を受信する設備の近く即ちサイトから離れた位置に配置されるものであってもよい。
以降で詳細に説明するように、圧縮成形用機械は、ゴミ処理地、地面又はアスファルトを圧縮成形するために用いられるような車輪付き又はローラータイプのものでもよい。
好適な実施形態において、本発明の方法及び装置は、位相差GPS受信システムを用いる世界的位置検出用人工衛星から得られた3次元位置情報を利用することにより実現される。このようなGPS受信機は、世界的位置検出用人工衛星からの信号と既知の位置座標のローカルな基準受信機からの差分信号とを利用している。従って、本発明の実施形態において使用される装置は、GPSとローカルの両方の信号を受信する能力を備えたGPS受信機を有し、更に、測地学的に実測されたサイトでのローカルな基準信号が利用できない場合は、ローカルデータ処理装置に修正信号を供給する一時的に測定された差分用受信機/送信機を有している。または、機械に搭載された受信機からの情報との比較及び補正のために、生の位置信号を基準受信機からローカルデータ・プロセッサに送信することも可能である。
本発明の他の観点によれば、ゴミ処理地、建設サイト及び道路のようなサイト上の圧縮成形作業を実行する際に使用されるディスプレイを正確に生成して制御するための手段が提供される。ここで、このディスプレイは、ディスプレイのユニット(単位)領域がGPS受信機とデジタル処理システムのサンプリング速度と対応している場合又はしていない場合に増分(インクリメント)ベースで圧縮成形用機械により成された進展状況を正確に表示するためのものである。後述しるように、サイト即ちサイトの実際的に表示可能な部分は、ユニット領域の連続的なマトリックスにさらに分割される。このユニット領域のサイズは、圧縮成形用機械がGPS受信機とデータ処理設備のサンプリング速度より大きい速度でこれらのユニット領域を横切ることができるようなサイズである。圧縮成形用車輪やローラの物理的なパラメータと寸法、及びそれらと機械及びそれらの移動経路との関係を考慮したアルゴリズムが提供される。ディスプレイのユニット領域は、後述するデジタル処理設備内にあるアルゴリズムに従って、GPS受信機又は他の位置検出用システム及びデジタル処理設備から得られた進展情報に基づいて、充填され、色付けされ、修正又は他の方法により変更される。
本発明の一実施形態において、サイトに関する表示位置(position readings)の間で圧縮成形用機械のリアルタイム経路が、実際の幅以下の圧縮成形用車輪の有効幅を判定し、且つその有効幅が横切るサイトモデルの各部分を更新する差分用アルゴリズムを用いて判定される。好適な実施形態において、サイトを横切るときの機械の瞬間位置は、サイトモデル上の一連の座標点として追跡される。座標点が追跡される速度が、ユニット領域即ちグリッド要素上を機械が移動する速度と同期していない場合には、差分用アルゴリズムが、座標点の間で機械の圧縮成形用車輪により横切られるユニット領域を判定する。圧縮成形用車輪の有効パラメータは、実際のパラメータより少なく設定されることが好ましく、これにより、車輪によりある程度まで実際に横切られたサイトのこれらの部分のみが、圧縮成形用通過及び実サイトモデルと目標サイトモデルとの間の圧縮成形の程度における現在の差異を反映させるために、充填され、色付けされ、修正又は他の方法により変更され、またはマークされる。
一実施形態において、第1サイトモデルは、サイト地形の所定の圧縮成形標準であり、未圧縮成形状態の地形即ち材料を圧縮成形の目標値とするのに必要な圧縮成形作業を表している。一実施形態における方法では、未圧縮成形材料を圧縮成形の目標値とするために、所定の圧縮成形のための通過回数のような通過回数の標準値を使用している。若しくは、この圧縮成形標準値は、未圧縮成形状態のレベから圧縮成形の目標値を示す所定のサイト面の標高の変化を含むものであってもよい。本発明のシステム及び方法は、新しい材料が追加され圧縮成形作業が繰り返し行われることによりサイトが建設され即ち充填される際にも、サイトの全地形をモニターし更新することができる。
一実施形態において、第2の即ち実サイトモデルが、標準的な従来のサイト実測方法を用いてサイト面の実際の標高即ち地形を記録することにより最初に作られ、その後、特定のデジタル化データ処理システムの物理的なデータ処理要求によりデジタル化されたそのような実測値のデータとなるようなものでもよい。若しくは、実サイトモデルは、圧縮成形機械自身がサイト上を移動することにより作られたものでもよく、又は、条件に適合する特別な機械及び/又は車両を使用して作成されたものでもよい。
【図面の簡単な説明】
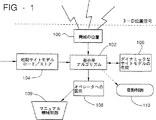
図1は、本発明による圧縮成形用機械の位置検出及び制御を示す概略図である。
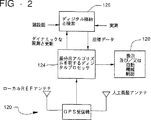
図2は、本発明を実施するために、GPS信号の受信及び処理に関連して使用される装置を示す概略図である。
図3は、GPS位置検出を用いる図2のシステムの一実施形態を示す詳細な概要図である。
図4は、ワークサイト、圧縮成形用機械、及び本発明の一実施形態による位置検出及び制御システムを示す概要図である。
図5A−5Bは、本発明で使用されるような地形的なゴミ処理値のサイトモデルの例を示すグラフである。
図6A−6Bは、ゴミ処理地の圧縮成形作業のために、本発明により生成されたリアルタイムのオペレータディスプレイを示している。
図7A−7Iは、本発明によるダイナミックなデータベースを表すフローチャートである。
図8は、閉ループの自動機械制御システムを含む本発明のシステムを示す概要図である。
発明の実施の形態
図1には、圧縮成形作業に用いられる本発明の方法が概略が示されている。既知の3次元位置検出システム、例えば(これらには限定されない)、3−Dレーーザー、GPS、GPSとレーザーの組み合わせ、又はレーダーなどを使用して、圧縮成形の位置座標が、機械がそのサイトを移動しているときに、ブロック100で判定される。これらの座標が、一連の別個のポイントとして同時に102の差分用アルゴリズムに供給される。この差分用アルゴリズムは、リアルタイムで、機械の位置と経路を計算する。そのサイトの地形の実際的で且つ望ましい程度の圧縮成形のディジタル化されたモデルが、ブロック104でロードされ又は格納される。なお、このブロック104は、アクセス可能なディジタル格納及び検索設備、例えば、その場所の(ローカルな)ディジタルコンピュータである。差分用アルゴリズム102は、104からのサイトのモデルを検索し、操作し、更新し、さらに、新しい位置情報をブロック100から受信したとき、リアルタイムで実際のサイトのモデルを更新しながら、実際のサイトと望ましいサイトのモデルとの差異に関する動的なサイトのデータベースを106で生成する。この動的に更新されるサイトのモデルは、この後、表示ステップ108においてオペレータが使用可能となる。なお、この表示ステップ108は、人間が読み易いフォームでリアルタイムの位置、方向、及び地形/圧縮成形の更新値を提供する。この表示からの情報を用いて、オペレータは、効率良くモニターでき、さらに、109で、圧縮成形用機械のマニュアル制御を指示する。
付加的に又は代わりに、ダイナミックな更新情報が、110で、機械自動制御システムに提供可能である。この機械自動制御システムの例としては、キャタピラー・インクが開発した電子式油圧制御システムがあり、このシステムは、種々のポンプ、バルブ、油圧シリンダ、モーター/ステアリング機構、及び圧縮成形用機械に使用される他の制御機器を操作するのに使用される。この電子式油圧制御は、オペレータの提案した動作が例えば機械のオーバーロードであった場合には、機械作業を最小限にし且つマニュアルによる制御を制限するように、オペレータを補助することが可能である。又は、ダイナミックなデータベースからのサイトの更新情報を使用して、1又はそれ以上の機械操作システムの完全な自動制御を行うことが可能である。
上述したことから明らかであるが、本発明の方法によれば、初期の実際のサイトの地形を、それ以前に実測されていない地面上の圧縮成形用機械それ自身により、生成することができる。通常のパターンで提案されたサイト上を単に機械を移動させることにより、現在の地形を判定することができる。サイトの初期の地形が初期の3次元の基準としてひとたび確立されれば、実際の目標サイトモデルが、104でロードできる。目標サイトモデルは、サイト面上の材料の圧縮成形の程度の目標値を意味している。実際のサイトモデル(実サイトモデル)は、圧縮されていない状態と圧縮成形の目標値との間の、サイト材料の圧縮成形の程度の実際の値を意味している。機械が圧縮成形動作の際にサイトを横切ったとき、実サイトモデルがモニターされ、実サイトモデルが目標サイトモデルと一致するように、106でリアルタイムで更新される。
図2には、本発明を実施するためにGPS信号の受信と処理との関係で使用される装置が、ブロック図として示されている。この装置は、ローカル用の基準アンテナと人工衛星用のアンテナを備えたGPS受信装置120と、120からの位置信号を受信するように結合されさらに差分用アルゴリズムを用いるデジタルプロセッサ124と、このプロセッサ124によりアクセスされ且つ更新されるデジタル格納・検索用の設備126と、プロセッサ124からの信号を受信するオペレータ表示及び/又は自動機械制御128と、を有する。
GPS受信システム120は、世界的な位置検出用人工衛星からの信号を受信する人工衛星用アンテナと、ローカル用の基準アンテナを備えている。このGPS受信システム120は、人工衛星用アンテナからの信号とローカル用の基準アンテナからの差分修正用信号を用いて、移動物体に対してセンチメートルの精度で3次元の位置座標データを生成する。若しくは、ローカル用の基準アンテナからの生データが、プロセッサ124に送信され、そこで、差分修正がその場所で判定される。
この位置情報は、GPS受信機120のが座標サンプル速度が許容するので、リアルタイムベースでデジタルプロセッサ124に提供される。デジタル格納設備126は、例えば、所定の圧縮成形の基準のようなサイトの圧縮成形の目標値(目標となる程度)である第1サイトモデル(目標サイトモデル)と、例えば、初期に実測された非圧縮成形されていないようなサイトの圧縮成形の実際の程度である第2サイトモデル(実サイトモデル)を格納する。この実サイトモデルは、GPS受信機120からの新しい位置検出用情報を受信するとリアルタイムでアクセスされ更新されることが可能である。
デジタルプロセッサ124は、更に、連続的に更新される実サイトモデルと目標サイトモデルとの差異を表す信号を生成する。これらの信号は、オペレータ表示及び/又は自動機械制御128に供給され、実サイトモデルを目標サイトモデルと一致させるように、サイト上を動作中の機械に指示を与える。オペレータ表示128により、実サイトモデルと目標サイトモデルとの差異を視覚的に1又はそれ以上の方法により表し、これにより、必要な圧縮成形動作のために機械を走行させる際にオペレータをガイドしている。
図3には、位置検出用基準信号のために動的GPSを使用する図2に示されたシステムの概略が示されている。ベース基準モジュール40と位置検出用モジュール50の両者が、サイトに関する圧縮成形用機械の3次元座標を判定し、一方、更新/制御モジュール60がこの位置情報をサイトのリアルタイム表示に変換し、これが、機械を正確にモニターし制御するために使用可能である。
ベース基準モジュール40は、静止GPS受信機16、この受信機16から入力を受信するコンピュータ42、このコンピュータ42に一時的又は永久的に格納される基準受信機GPSソフトウエア42、標準のコンピュータ・モニター・スクリーン46、及び、コンピュータ42に接続されデジタルデータ流れを送信可能なデジタル・トランシーバタイプの無線機48を備えている。図示の実施形態では、ベース基準受信機16は高精度のダイナミックなGPS受信機であり、コンピュータ42は、例えば、ハード駆動、8メガバイトRAM、2つの直列通信ポート、プリンターポート、外部モニターポート及び外部キーボードポートを備えた486DXのコンピュータであり、モニター・スクリーン46は、受動型マトリックス・カラーLCDであり、さらに、無線機48は、商業的に利用可能なデジタル・データ・トランシーバである。
位置検出用モジュール50は、マッチング・ダイナミックGPS受信機18、この受信機18からの入力を受信するマッチング・コンピュータ52、このコンピュータ52に永久的に又は一時的に格納されるダイナミックGPSソフトウエア54、標準のコンピュータ・モニター・スクリーン56、及び、ベース基準モジュール40の無線機48から信号を受信するマッチング・トランシーバタイプのデジタル無線機58を備えている。図示された実施形態において、位置検出用モジュール50は、ワークサイト上を移動する圧縮成形用機械に搭載されている。
更新/制御用モジュール60は、図示された実施形態において同様に圧縮成形用機械に搭載されており、位置検出用モジュール50からの入力を受信する追加のコンピュータ62、コンピュータメモリーにデジタルで格納されロードされる1以上のサイトモジュール64、同様にコンピュータメモリーに格納されロードされるダイナミック・データベース・更新モジュール66、コンピュータ62に接続されるカラー・オペレータ・表示スクリーン22を備えている。オペレータ表示22の代わりに若しくはこれに追加して、自動機械制御70が、コンピュータに接続可能であり、これにより、既知の全自動又は半自動の方法により機械を操作する信号を受信する。
更新/制御用モジュール60は、ここでは圧縮成形用機械に搭載されているが、それらの一部又は全部の部分を遠隔地に配置させるようにしてもよい。例えば、コンピュータ62、サイトモデル64、及びダイナミック・データベース66は、位置検出用モジュール50とオペレータ表示22又は機械制御用インターフェイス70に、無線データリンクを介して接続可能である。位置決め及びサイトの更新情報は、表示又は機械に搭乗若しくは非搭乗のオペレータや監督者の使用のために、機械へ又は機械から放送することが可能である。
ベース基準ステーション40は、ワークサイトに関して知られている3次元座標のある点に固定されている。受信機16を介して、ベース基準ステーション40は、GPS人工衛星からの位置情報を受信し、基準GPSソフトウエア44を用いて既知の方法によりその時の誤差量である補正要素を得る。この補正要素は、ベースステーション40から無線リンク48,58を介して圧縮成形用機械の位置検出用ステーション50へ放送される。又は、生の位置データが、ベースステーション40から無線リンク48,58を介して位置検出用ステーション50へ送信され、さらに、コンピュータ52により処理される。
機械に搭載された受信機18は、人工衛星から位置情報を受信し、一方、動的GPSソフトウエア54は、受信機18からのこの信号をベース基準40からの補正要素と組み合わせて、数センチメートル以内で、ベース基準40とワークサイトに関して受信機18と圧縮成形用機械の位置を判定する。この位置情報は、3次元(例えば、緯度、経度、標高)であり、GPSシステムのサンプリング速度に応じて1点毎のベースで利用可能である。
更新/制御用モジュール60については、デジタル化された図面であるサイトのモジュールがひとたびコンピュータ62にロードされれば、ダイナミックなデータベース66がサイトの圧縮成形の実際の値(程度)と目標値(程度)との誤差を表す信号を生成し、サイト地形に関してオペレータ表示スクリーン22上にこの差異を図示的に表示する。
位置モジュール50から受信した位置情報を用いて、データベース66は、サイト上の機械の実際の位置と方向に対応して、ディスプレイ22上に、サイト地形上に重ね合わされた圧縮成形用機械の図示的アイコンを生成する。
位置検出用モジュール50は、圧縮成形用機械がサイト上を移動する際に位置座標点の間の時間/距離表示に帰着するので、本発明のダイナミックなデータベース66は、区別用アルゴリズムを用いて機械の経路をリアルタイムで判定して更新する。
サイトに関して圧縮成形用機械の正確な位置、サイトの圧縮成形の程度及び機械の圧縮成形に関する進行度を知ることにより、オペレータは、直観的な感覚、記憶や物理的なサイトのマークに頼ることなく、サイト上で圧縮成形用機械を操作して圧縮成形することができる。さらに、オペレータがサイト上で機械を移動させているとき、ダイナミックなデータベース66は、モジュール50から入って来る位置情報を連続して読み取り且つ操作して、サイトに関する機械の位置、サイト上の機械の経路、及び機械の経路により影響を受ける圧縮成形の程度におけるあらゆる変化を、ダイナミックに更新する。この更新された情報は、サイトの表示を生成するために使用され、さらに、圧縮成形用機械のオペレータに実際の更新されたサイトモデルを目標サイトモデルと一致させるように指示する。
産業上の利用の可能性
図4には、建設サイト12にある圧縮成形用機械10が示されている。この図4に示された実施形態において、機械は、車輪付きゴミ処理地用圧縮成形機である。しかしながら、本発明は、サイト上を移動して原材料を圧縮成形することができる全ての圧縮成形用機械に適用される。
圧縮成形機10は、既知の油圧即ち電子油圧制御装置(図示せず)を備えている。図4に示す実施形態において、これらの制御装置は、例えば、ステアリング及びモーターを制御する。圧縮成形機10は、圧縮成形機の進行方向を制御する2つの離れた前輪26と、圧縮成形機10の車体即ちフレームに関して固定されている2つの離れた後輪28を備えている。これらの圧縮成形機の車輪26,28は、幅広でスタッド付きの表面を有し、この表面により、既知の方法によりゴミ処理地の廃棄物や破片を圧縮成形することができる。圧縮成形機10は、重く、さらに、横切るときに車輪により原材料上に作用する圧縮成形力を増大させるために、荷重をかけるようにすることもできる。
圧縮成形機10は、機械の位置及び/又はその圧縮成形用の車輪の位置を高精度で判定することができる位置決めシステムを備えている。この位置決めシステムは、図4の実施形態において、位相差GPS受信機18であり、これは、サイトとの接触部分である車輪の踏み跡に関して固定された既知の座標で、機械上に配置されている。機械に搭載された受信機18は、図3に示すように、GPS18から位置信号を受信し、無線リンク48,58を介してベース基準16から誤差/補正信号を受信する。機械に搭載された受信機18は、人工衛星からの信号とベース基準16からの誤差/補正信号の両方を用いて、3次元空間でその位置を正確に判定する。他の方法として、生の位置データをベース基準16から送信し、これを機械搭載の受信システムにより既知の方法により処理し、同様な結果を得ることもできる。動的GPSの情報及び本発明の使用に適したシステムが、例えば、ハッチ(Hatch)に付与され1989年3月14日に発行された米国特許第4,812,991号明細書及び1990年10月16日に発行された米国特許第4,963,889号明細書に開示されている。ダイナミックGPSや他の外部基準からの適した3次元位置信号を用いて、受信機18及び圧縮成形機10の位置が、圧縮成形機10がサイト12上を移動する際、数センチメートル以内で1点毎のベースで正確に判定される。図示の位置検出用システムを用いる座標点のサンプリング速度は、ほぼ1秒毎に1点である。
ベース受信機16の座標は、GPSによる位置決めや従来の実測方法のような既知の方法により決定可能である。さらに、米国や他の諸国において、空港のような固定され国により実測されたサイトにGPS基準を設置するための手段が取られる。サイト12がこのような国により実測されたサイト及びそのローカルGPS受信機の領域(最近では約20マイル)以内の場合、そのローカル受信機は、ベース基準として使用可能である。選択的に、三脚に取り付けられたGPS受信機16のようなポータブル受信機及び再放送送信器が使用可能である。ポータブル受信機は、上述したように、その場所がサイト12またはその付近で実測される。
図4に示すように、圧縮成形機10には、オンボード・デジタル・コンピュータ20が搭載され、これには、ダイナミック・データベースとカラー・グラフィック・オペレータ・ディスプレイ22が備えられている。このコンピュータ20は、圧縮成形用位置検出情報を連続的に受信できるように、受信機18に接続されている。ここで、コンピュータ20、ダイナミック・データベース及びカラー・グラフィック・オペレータ・ディスプレイは、必ずしも図示のように圧縮成形機10に搭載する必要はない。
図4の実施形態において、機械に搭載された受信機18は、地面と接触する部分である車輪の踏み跡から固定の既知の距離だけ離れた圧縮成形機10の運転室上に配置されている。実際にサイトの地形と接触しているのは車輪であるため、受信機18は、この標高差を考慮に入れて較正される。要するに、運転室に搭載された受信機18は、圧縮成形機が操作されるサイトの地形と同一のレベルにあるとシステムにより感知されるのである。
圧縮成形機のサイトと接触する車輪から固定距離離れた位置で単一の位置検出用受信機18を使用することにより、効果的で且つ強固な取付構造となる。しかしながら、特定の用途においては、位置検出用受信機のために別の異なる取付構造を採用することが好ましい。例えば、図6Aのアイコン82と方向指示器18によりディスプレイ22上に示されたサイト面に関する圧縮成形機の今の方向は、受信機18のサンプリング速度と機械の方向変化に基づく少しのタイムラグ・ベクトルによりズレでいる可能性がある。1つの位置検出用受信機18がトラクター(圧縮成形機)に搭載されている場合、機械が効果的に1つの受信機の回りを旋回するので、1つの点における機械の方向は、判定できない。この問題は、機械上に第2の位置検出用受信機を方向基準点のために第1の受信機から離して配置することにより解決される。
さらに、図4における車輪26,28と運転室に搭載されたGPS受信機18との距離により、車輪がサイトを圧縮成形しているとき、車輪の位置を分析する際に少しのリアルタイムのズレが生じる。ほとんどの場合、この遅れは、GPSの位置が車輪に近接して先行するか追従しており、さらに圧縮成形作業がほぼ一致しているので、無視できる。しかしながら、より大型の機械では、図4で仮想線で示したように、1以上の車輪と直接的に整合する1以上の受信機18aを設けることが好ましい。
図5Aと図5Bに示すように、図示されたゴミ処理サイトは、事前に実測され、平面的に所期のゴミ処理サイトの地形を示す詳細な地形の青写真(図示せず)が提供される。このように光学的実測及び他の技術を用いてゴミ処理サイトや建設サイトのようなサイトの地形の青写真を製作することは、周知技術である。複数の基準点がサイト上のグリッドの上にプロットされ、さらに、その後、青写真上にサイトの輪郭線を生成するためにこれらの基準点が接続され且つ充填される。基準点の数が多いほど、詳細なマップになる。
地形的なサイトのデジタル化された2次元又は3次元のマップを作るために、システムやソフトウエアが現在利用可能である。例えば、地形的な青写真を、図5Aの36により示す最初に実測されたゴミ処理の地形の3次元のデジタル化モデルに変換することができ、また、同様に、例えば、図5Bの38により示す埋め立てゴミが十分に充填された後のようなその後のサイトの地形の3次元のデジタル化モデルに変換することができる。このサイトの輪郭線は、既知の方法により、均一なグリッド要素37の基準グリッドにより上からかぶせられる。デジタル化されたサイト面を、種々の角度(例えば、平面やプロフィール)から2次元的又は3次元的に見て、重ね合わせ、さらに、充填即ち圧縮成形される必要があるサイトの領域を示すためにカラー符合化することも可能である。
しかしながら、サイトが実測され、さらに、機械のオペレータ及び彼らの監督者が紙の青写真又はデジタル化サイトの図を見て作業をしているが、従来のやり方では、単にゴミ処理地に材料を加えて、感覚的、記憶により及び/又は物理的な目印により、圧縮成形作業をモニターしている。このプロセスの間、オペレータの進行具合は、均一な満足すべき圧縮成形が達成されるまで、定期的にチックされ、静的でステップバイステップな方法により圧縮成形作業が調整される。このようなマニュアルによる定期的な更新とチェックを行うことにより、多くの労働力が必要で、多くの時間がかかり、目標とするものより劣る結果を得ることなる。
しかしながら、日数が立ち作業が進行することにより青写真やデジタル化サイトモデルを訂正する必要があるときには、サイトを、再び、静的に実測し、青写真やデジタル化サイトモデルを非リアルタイムでそのズレをマニュアルにより修正しなけらばならない。
このような従来技術は、モニターし、静的実測を行い、方法を更新するため問題があるが、本発明は、正確な3次元位置決め及びデジタル化されたサイトの地図作成を、ダイナミックに更新されるデータベース及びリアルタイムのモニターとサイト12と圧縮成形機10の制御と、統合させたものである。このダイナミックなサイトのデータベースは、サイトの地形の圧縮成形の程度に関して実サイトモデルと目標サイトモデルとの差を判定し、位置検出用受信機18からサイト12に関してコンピュータ10のために動的GPS位置検出情報を受信し、ディスプレイ22上にオペレータに対してサイトモデルと現在の機械位置の両者を表示し、さらに、センチメートルのレベルで測定された精度でリアルタイムで実際のサイトモデル、機械位置及び表示を更新する。従って、オペレータは、現場で、リアルタイムの圧縮成形作業を行う上で先例のない知識と制御を達成し、さらに、実質的に中断、又はチッェクやサイトを再実測の必要性なく、業務を終了させることができる。
次に、図6A−6B及び図7A−7Iには、ゴミ処理地の圧縮成形作業に適用された本発明が示されている。
例えば、ゴミ処理、地面、又は生アスファルトなどを機械により圧縮成形する際には、圧縮成形作業は、典型的には圧縮成形されるべき表面上を圧縮成形機が通過した回数の関数に基づいて完了する。この圧縮成形の目標となる程度は、例えば、未圧縮成形材料のテスト領域上を圧縮成形機を走らせて、適当な通過回数の標準値を経験的に決定することにより、決定することができる。図示した例によるゴミ処理地の圧縮成形作業においては、スタッド付きのローラーや車輪を備えた大型で大重量の圧縮成形機のような機械が、ゴミ処理地の一部分上を通過して、その地方の圧縮成形規則又は正常な圧縮成形の実務に基づいて、ある程度まで新しい廃棄物を圧縮成形する。そのため、圧縮成形機のオペレータは、以下の事項を知ることが重要である。即ち、オペレータがゴミ処理地のサイトの与えられたユニット領域であるグリッド要素の上にいるか否か、圧縮成形機がサイト上の与えられたグリッド要素の上を何回通過したか、サイト上のグリッド要素内で連続的に材料が圧縮成形された広さ、さらに、最後の圧縮成形機の通過以降に非圧縮成形の材料が特定のグリッド要素に加えられたか否かである。
圧縮成形作業の開始時には、実サイトモデルは、最初に非圧縮成形状態のサイト地形の3次元の実測値であるマップ、例えば、ごみ処理地に適用された図5Aのデジタル化された3次元のサイトモデルを有している。圧縮成形作業が進行するにつれて、実サイトモデルは、サイトの面上の材料の圧縮成形の実際の程度をより具体的に有するものとなる。ここで、圧縮成形の実際の程度は、例えば、圧縮成形機の通過回数及び/又は標高の変化により測定される。実サイトモデルは、新しい材料が加えられたとき又は古い材料がさらに以前の状態から圧縮成形さらたとき毎に変化するようなダイナミックさを持っている。
目標サイトモデルは、サイトの面上の材料に対する圧縮成形の程度を示す所定の目標値を有している。例えば、圧縮成形の程度の目標値は未圧縮成形領域を圧縮成形機が合計5回通過した場合であると予め決定されている場合には、目標サイトモデルは、未圧縮成形領域上を5回通過する通過回数となる。その通過回数となったとき、目標サイトモデルが、達成される。サイト上のいかなる地点における実サイトモデルと目標サイトモデルとの差異は、その地点における圧縮成形の実際の程度と目標値との差異を有する。
従って、実サイトモデルは、サイト材料の非圧縮成形状態と圧縮成形の目標値との間を変動する。新しい未圧縮成形材料がそれ以前はサイトの圧縮成形領域で検出されたときにはいつでも、実サイトモデルは、その領域の未圧縮成形状態に戻って減少する。
本発明の方法及び装置を使用することにより、この情報の全てが、オペレータにユーザーフレンドリーな表示を用いて、高精度でリアルタイムで判定され且つ更新される。
図6Aは、本発明による圧縮成形作業用のサンプルのオペレータ・ディスプレイ22を示している。重ね合わされたセットのグリッド要素を持つゴミ処理サイトのデジタル化モデルと、図3に示す位置検出用モジュール50と更新/制御モジュール60を備えた圧縮成形機を用いて、オペレータは、最初に、典型的にゴミ処理サイトに入るときに、オペレータ・ディスプレイ22を初期化する。ゴミ処理地の圧縮成形において、1日の行動領域は数百又は数千平方メートルのオーダで通常は小さい。図6Aには、任意に設定された約30メートル×40メートルのサイトのデータベースが示されている。この領域の大きさは、特定の圧縮成形作業の性質に基づいている。これは、典型的な圧縮成形の全面積より小さいが、圧縮成形機のオペレータが圧縮成形を行う予定であるゴミ処理地の一部のために必要なデータベースの1日分である。
広いゴミ処理地では、個々のサイトのデータベースが1日の開始時に各オペレータに分配され、その日の終了時にゴミ処理地の各部分の更新されたデータベースが集められ、さらに、それらのデータベースは翌日の作業のために全てのゴミ処理地に関して再度関連付けられる。
図示の実施形態においては、システムは、スタートに初期化する際、圧縮成形機は、一定面積の正方形例えば1平方メートルのグリッドに分割されたサイトに中心に位置していると任意に想定する。オペレータは、指定中心マークまで運転するか又はGPSか類似の位置決め技術により、指定されたサイトに関して圧縮成形機を中心に配置する。
圧縮成形機がサイトの中心に到達すると、オペレータは、ディスプレイを初期化し、スクリーン22には、図6Aに示されたような平面ウインドウ70にサイトのデータベースが表示される。このスクリーン22は、グリッドのパターン要素71に区画され、サイト上を一度も通過していないことを示すために、最初はそれらの全てが1色例えば黒色になっている。位置座標ウインドウ72は、圧縮成形機の現在の位置を、緯度、経度、標高及び時間で示している。メニューウインドウ73は表示ソフトウエアにおけるズーム選択を示し、この表示ソフトウエアにより、平面ウインドウ70に表示されるサイトの広さをオペレータが拡大したり縮小したりすることができる。圧縮成形機の位置は、方向指示器84を有するアイコン82により表示される。
サイト上での作業が開始される前に、サイトの圧縮成形の程度の目標値を表示するために、圧縮成形標準値(ここでは通過回数)がセットされる。例えば、適切に圧縮成形するためにその1つのグリッド要素に対しては圧縮成形機が未圧縮成形材料の上を5回通過する必要があると判定される場合である。オペレータがサイトを横切るとき、グリッド要素上を圧縮成形機の車輪が1度通過する毎に、リアルタイムでデータベースが更新される。サイト表示のグリッド要素を、実際の圧縮成形の程度と目標の圧縮成形の程度との差異を種々の方法により視覚的に更新することができる。例えば、濃淡、斜めのハッチング、色付け(カラーディスプレが使用されているとき)、又は他の既知の方法により、オペレータにグリッド要素の圧縮成形の状態を示すことができる。図6Aの実施形態においては、グリッドは、色を変化させて、何回通過したかという点に関して実際の圧縮成形の程度を表示する。例えば、図6Aにおけるグリッド要素71の濃淡(最も濃いものから最も淡いものまで)は、通過無しが黒色、1回通過が黄色、2回通過が緑色、3回通過が赤色、4回通過が青色、5回通過で満足すべき圧縮成形のものが白色をそれぞれ示している。オペレータディスプレイが各グリッド要素を通過する回数を表示してリアルタイムで更新されるにしたがって、目的物によりスクリーン全面が白色となる。
オペレータへの更なる支援として、座標サンプルにより測定された圧縮成形機の近似経路を、図6Aに示すように、各位置の読み込みが行われた一連のドット83によりディスプレイ22上に表示することもできる。
図6Bは、ディスプレイの他の例であり、図6Aにおいて2次元面で示されていたサイトと圧縮成形機がウインドウ70内で3次元で示されている。
また、あるプロトコルが必要であるが、これは、圧縮成形機の車輪がそのグリッド要素の十分な部分を通過することにより、グリッド要素の状態の更新を保証し更にオペレータディスプレイ上に圧縮成形の通過を登録できるようになったときを判定するためのものである。2個又はそれ以上の離間した車輪を備えた図示の圧縮成形機に対して、以下の方法が使用できる。デジタル化されたサイト面上の各グリッド要素のサイズを、圧縮成形機の車輪の幅と一致させることが好ましい。この場合、例えば、1メートルの幅の車輪に対して、グリッド要素は、1平方メートルにセットすることになる。従って、車輪の中央がいかなる点でグリッド要素を横切っても、少なくともグリッド要素の半分が圧縮成形されたと想定され、ディスプレイ上に更新される。これらの寸法とマージンは、変更可能である。
固定された後輪の地面との接触面(踏み跡)の座標は、圧縮成形機上の位置検出用受信機との関係で知られている。従って、位置検出用システムによる各座標サンプリングが、その点における各車輪の中心の正確な位置を判定するために使用される。
図示の実施形態において、典型的な圧縮成形機では後輪が運転室と位置検出用受信機18に対して一定の距離離れているため、後輪の踏み跡の位置が追跡可能である。更に、圧縮成形機は、既に圧縮成形された材料を乱すことになる急旋回を行うことなく、ほぼ直線的に前進と後退を行う。等しく離間した前輪と後輪の経路は、ほぼ重複するため、前輪の圧縮成形の経路は固定された後輪の経路により正確に推定できる。
圧縮成形機が幾つかのグリッド要素上を移動するときの座標サンプリング間のタイムラグを考慮して、圧縮成形機の全体のリアルタイム経路を正確に判定するようにしている。車輪の幅がサイトモデルのグリッド要素の幅とほぼ一致する圧縮成形機において、本発明の実施形態に示された好適な方法は、良く知られたBresenhamのアルゴリズムを用いて、座標サンプリング間のグリッド要素上の各車輪の経路を近似する連続的な線を生成する。その後、サンプリング速度が、3個又は4個のグリッド要素毎に座標点を提供するのみであれば、近似線は、それらの3個又は4個のグリッド要素(車輪の中心と対応している)上の車輪の経路として作成され、さらに、この線に沿う全てのグリッド要素は、それらの状態が更新され、オペレータディスプレイ上で視覚的に変化する。
図7Aには、ごみ処理地の圧縮成形に適用された本発明による方法が示されている。ステップ500で、オペレータがコンピュータ・オペレーティング・システムから開始する。ステップ502で、データベース・メモリーを割り当て、さらに、初期化する。ステップ504で、種々の表示を初期化する。ステップ506で、位置検出用モジュールと更新/制御モジュールの間の直列の通信ポートを初期化する。ステップ508で、例えばコンピュータ・キーボードのようなユーザー・インターフェイス・デバイスからそのプログラムを終了させる旨のオペレター要求があったか否かをシステムが判定する。この選択は、いつでもオペレータは可能である。システムがこのような終了の要求があったと判定すると、ステップ592に進み、その時点のファイル内のサイドのデータベースをディスクのような適当な記憶デバイスに格納する。ステップ594,596で、オペレータをコンピュータ・オペレーティング・システムに戻す。
しかしながら、ステップ508で、システムがプログラムを終了させる要求がなかったと判定した場合には、ステップ510に進み、図3に示す位置検出用モジュール50と更新/制御モジュール60の間の直列通信ポートから位置座標を読み取る。この位置座標は、図示の実施形態では、3次元のGPSにより判定された座標点である。ステップ512で、圧縮成形機の位置を、オペレータ・ディスプレイ・スクリーン22上のウインドウ72(図6A参照)内に、ベース基準16に関して3次元座標として、表示する。
ステップ514では、第1システムループのために、圧縮成形機の位置を、平面ディスプレイ70の中央のアイコン82によりオペレータ・スクリーン22上に最初に表示する。図6Aの実施形態では、70に表示されたサイトのデータベースは、約30メートル×約40メートルであり、圧縮成形機は2個の離間した後輪を有し、各後輪は、1メートルの幅であり、さらに、グリッド要素のサイズは、1平方メートルに固定した。
ステップ514では、サブルーチンが図7B−7Cに示されており、表示とアイコンを描き、圧縮成形機の位置及び踏み跡と中心の部分即ち後輪の地面に接触する部分を判定し、サイトのデータベース上で後輪の経路を追跡し、さらに、圧縮成形機の経路内のグリッド要素の圧縮成形の状態を更新する。
図7Bに示すように、ステップ516では、システムが、第1プログラムループが実行されたか否かを判定する。判定されていなければ、ステップ518で、サイトのデータベースと表示ウインドウ座標システムを初期化してオペレータ・スクリーン22上に表示する。第1プログラムループを初期化し、さらに、サイトのデータベース初期化してオペレータ・スクリーン上に表示すた後、システムは、ステップ520にて、アイコン82が描かれているか否かをチェックする。アイコンが描かれていれば、ステップ522で、それ以前のアイコン82をディスプレイから消去する。アイコンがまだ描かれていなければ、ステップ524で、システムが、第1ループが実行されたか否かを判定する。実行されていなければ、ステップ526で圧縮成形機の方位を初期化し、さらに、システムは、図7Aの全体のプログラムループを終了させる。ステップ524で、第1ループが実行されていると判定した場合には、システムは、図7Bのステップ528に進み、すぐ前のプログラムループ以降に圧縮成形機が移動したか否かを判定する。機械が移動していなければ、システムは、図7Bのサブルーチンを出て、図7Aの全体のプログラムループを終了させるために、ステップ514から戻る。
すぐ前のループ以降にサイトのデータベースに関して機械が移動していれば、システムは、図7Bのステップ530に進み、後輪の踏み跡の中心部分を計算し、さらに、これらから圧縮成形機の方位を計算する。図7Cのステップ532では、その前の位置測定の間に右後輪が占拠していたグリッド要素から右後輪の位置が外れたか否かをシステムが判定する。もし外れていれば、ステップ534で、ディスプレイ22上でグリッド要素の上を通る右後輪の連続線の経路を近似するために、周知のBresenhamのアルゴリズムを用いて、その前と今の座標サンプリングの間の右後輪の経路を判定する。その上を右後輪が通過するサイトのデータベースのグリッド要素を、その後更新して、圧縮成形機の通過を示し、さらに、グリッド要素を、色を変化させると共に他の視覚的指示器により、ビィジュアル・ディスプレイ・ウインドウ70上で更新する。
ステップ532で右後輪がその前の位置測定以降に移動していないと場合、若しくはステップ534で右後輪の移動が追跡され且つサイトのデータベースが更新された場合、圧縮成形機の左後輪に対してこのプロセスをステップ536,538において繰り返す。ステップ591にて、更新された圧縮成形機のアイコンをその後にディスプレイ上で再び描いてその現在の位置と方向を示す。図7B−7Cのステップ514のサブルーチンは、その後に終了し、さらに、システムは、図7Aのプログラムループに戻り、他のGPS座標サンプリングのためにステップ510に進むか若しくはオペレータの要求に応答して終了する。
図7Dは、車輪の追跡と作業の更新を行うステップ534と538のサブルーチンを示している。ステップ540において、その経路が判定されている車輪のための開始グリッドセル(要素)と終了グリッドセル(要素)を、GPS又は他の位置決め技術により行われた現在の車輪の位置測定とその前の車輪の位置測定とにより、画定する。Bresenhamのアルゴリズムを使用して、開始及び終了グリッドセルの間の経路に沿って位置するグリッドセルを判定し、さらに、システムは、ステップ544,546,548に進み、開始グリッド要素の後の第1グリッド要素から始めて、それらの間の各グリッド要素の状態を評価/更新する。ステップ542では、システムが終了グリッド要素が評価されたか否かを判定し、判定していなければ、ステップ544に進む。ステップ544では、評価されているグリッド要素を図7Eのサブルーチンに従って更新する。現在のグリッド要素の圧縮成形状態をステップ544でいったん更新すれば、その更新されたグリッド要素をステップ546でオペレータ・スクリーン22上に表示し、さらに、ステップ560で、システムは進み開始グリッド要素と終了グリッド要素の間の経路中の次のグリッド要素を評価する。このループは、終了グリッド要素を評価し更新するまで、それ自身を繰り返すのであるが、この終了グリッド要素の地点で、図7Dのサブルーチンのサブルーチンを実行し、さらに、プログラムを図7Cのステップ591まで戻し、ディスプレイ上に更新された圧縮成形機のアイコンを描く。
図7Eには、図7Dのサイトのデータベースの更新のステップ544のサブルーチンが示されている。図7Eに示すように、ステップ550で、システムが、現在のグリッド要素の標高が初期化されているか否かを判定する。初期化されていなければ、標高即ちそのグリッド要素のz軸座標を、その地点で現在測定された圧縮成形機の車輪の標高と等しくなるように、初期化する。グリッド要素の標高が既に初期化されていれば、システムは、ステップ554に進み、そのグリッド要素のために現在測定された車輪の標高とその前に測定された車輪の標高とを比較する。そのグリッド要素上の現在測定された車輪の標高が、その前に測定された車輪の標高より大きくない場合には、システムは、次の事項を判定する。即ち、システムは、新しい材料が加えられておらず、さらに、そのグリッド要素のために圧縮成形の通過を登録し且つ通過回数を増加させるためにステップ558でグリッド要素を増加させることが可能であることを、判定する。ステップ554で、現在測定された車輪の標高がその前に測定された車輪の標高より大きい場合(ユーザーにより決定された限界内で、例えば、その前の通過で圧縮された材料の少しの弾性膨張などを割り引きして考える)には、システムは、ステップ556で、アスファルト、土又は廃棄物材料の新しい持ち上がりがそのグリッド要素に対して検出されたことを判定し、全く新しい一連の圧縮成形のための通過回数を示すために、そのグリッド要素の通過回数の状態を再びゼロとする。ステップ560で、現在のグリッド要素の標高を、その後に、ステップ554での比較のために、圧縮成形機がそのグリッド要素上を次に通過する際に、現在の圧縮成形機の車輪の標高と等しく設定する。図7Eのサブルーチンは、図7Dのサブルーチンのループを終了させるために、その後に出ていく。
図7E−7Gは、図7Dのステップ546のサブルーチンを示している。現在のグリッド要素が通過回数が、図7Eのサブルーチンを使って図7Dのステップ544で更新されると、システムは、ステップ546で、図7E−7Gのサブルーチンに入り、さらに、ステップ562で、オペレータ・スクリーン22上の平面ウインドウ70内に表示されたサイトのデータベース上の現在のグリッド要素の位置とサイズを最初に判定する。ステップ564で、そのグリッド要素での通過回数が0回であれば、ステップ566で、そのグリッド要素を、例えば、ディスプレイ上で黒色に設定する。ステップ568でそのグリッド要素での通過回数が1回と判定されれば、ステップ570で、そのグリッド要素を、例えば、黄色に設定する。ステップ572でそのグリッド要素での通過回数が2回と判定されれば、ステップ574で、そのグリッド要素を、例えば、緑色に設定する。ステップ576でそのグリッド要素での通過回数が3回と判定されれば、ステップ578で、そのグリッド要素を、例えば、赤色に設定する。ステップ580でそのグリッド要素での通過回数が4回と判定されれば、ステップ582で、そのグリッド要素を、例えば、青色に設定する。ステップ584でそのグリッド要素での通過回数が5回(この実施形態においては、圧縮成形作業を完了するための通過回数は5回である)と判定されれば、ステップ586で、そのグリッド要素を、例えば、白色に設定する。その領域での通過回数が圧縮成形作業を完了するための最少の通過回数より多ければ、ステップ588で、そのグリッド要素を、白色に設定する。
そのグリッド要素が現在の通過回数により更新されれば、そのグリッド要素を、ステップ590で、オペレータ・ディスプレイ・スクリーン22上に描いて色付けする。このグリッド要素のスクリーン22上での更新は、色付け以外に、斜めのハッチング、濃淡、又は他の視覚的表示により行うことができる。
図7A−7Gには、サイトのグリッド要素の幅とほぼ同じ幅を有する2個又はそれ以上の圧縮成形用の車輪を備えた圧縮成形機における追跡及び更新方法が示されている。しかしながら、この方法は、当業者には容易に理解できるように、単一の車輪やローラーを備えた圧縮成形機にも適用可能である。この図7A−7Gに示された方法は、圧縮成形用車輪やローラーの幅がサイトモデルのグリッド要素の幅と一致しない場合でも使用可能である。しかしながら、圧縮成形用車輪やローラーの幅が1つのグリッド要素の幅とより相当大きい場合には、例えば、それが一度に数個のグリッド要素をカバーするような場合には、他の方法により圧縮成形用の車輪やローラーを追跡することもできる。
この他の方法は、図7Bのステップ530を図7Hのステップ530'に、また、図7Dのサブルーチンを図7Iのサブルーチンにそれぞれ置き換えることにより達成される。図7Hのステップ530'に示すように、システムは、実際の端部より内側の“有効”車輪又はローラー端部を示す。この実施形態では、この有効端部は、区別用アルゴリズムにより、実際の端部から1グリッド要素のほぼ半分の幅の距離だけ内側であると認識される。例えば、実際の車輪幅が5.0フィートで、5個の1.0フィート×1.0フィートのグリッド要素が対応している場合、有効な車輪端部の位置は、実際の各端部から0.5フィート内側と計算できる。圧縮成形機の有効(実際とは異なる)車輪端部がデジタル化されたサイトモデル上のグリッド要素のどの部分を通過しても、そのグリッド要素の少なくとも半分の上を実際に車輪が通過しているので、そのグリッド要素は、区別用アルゴリズムにより読み取られ操作される。勿論、車輪端部のオフセット量は、グリッド要素のサイズと、車輪が1グリッド要素上を通過したか否かを判定する際の誤差の目標限界値に基づき、変化させることができる。
図7Hのステップ530'のアルゴリズムが、圧縮成形用車輪又はローラーの幅と車輪又はローラーにより完全に横切られるグリッド要素の数とが完全に対応していないことを補償するが、その補償している間、GPSの位置を読み取っている間に車輪の位置と方向が変化し、これにより、圧縮成形機の移動部分上のリアルタイム更新情報にロスが生じる。これは、圧縮成形機の移動速度がサイト面のグリッド要素に関して高い場合に顕著となる。例えば、グリッド要素が1平方メートルで、位置検出用システムのサンプリング速度が1秒あたり1個の座標サンプルの場合、毎時18kmで移動する機械は、位置検出用サンプリングの間にほぼ5メートル即ち5個のグリッド要素を移動する。従って、機械によりカバーされる5個のグリッド要素の内少なくとも中間部の3個に関しては、リアルタイムの情報は存在しない。この問題を解決するために、図7Iに示す“多角形内の充填(fill in the polygon)”アルゴリズムを、座標サンプリング間に機械により横切られた経路を推定するために使用する。図7Iに示すように、ステップ540'で、アリゴリズムは、位置(x1,y1),(x2,y2)及び座標(x0,y0)で表された位置で、圧縮成形機の車輪の有効端部により設定されたサイト面のグリット表面上で矩形を見つける。ステップ542',543'548'で、サーチ用アルゴリズムが、この矩形の境界内で、2つの車輪の位置の間で設定される多角形内のこれらのグリッド要素、例えば、車輪の有効端部の間の車輪により横切られたこれらのクリッド要素、をサーチする。
ステップ544',546'において、データベースと表示は、図7D−7Fのステップ544,546でそれぞれ説明したように、更新される。
上述したように本発明を圧縮成形に適用した実施形態は、通過回数をベースとしたシステムである。しかしながら、他の更新用プロトコルも適用可能である。例えば、グリッド要素の上を1回通過したときの圧縮成形量の変化をその前の通過以降の標高の変化を調べることにより判定することも可能であり、さらに、特定の通過の際の標高の変化が所定値より低い場合(ゴミがほぼ目標圧縮成形密度となったことを示している)、そのグリッド要素は、完了したとしてスクリーン上で更新される。他の方法は、絶対的な圧縮成形標準値を用いるものであり、特定のグリッド要素上の材料が未圧縮成形状態である初期の状態から所定の低い標高まで圧縮成形されたときに完了したとしてその特定のグリッド要素を更新するようにする。
図8には、本発明の他のシステムの概要が示されている。このシステムは、圧縮成形機に関して1以上のオペレーティング・システムを閉ループで自動制御するためのものである。図8に示す実施形態は、上述したような補助のオペレータ・ディスプレイを備えても備えなくてもよいが、ここでは、自動機械制御のみを示す。本発明のダイナミックなデータベースのアルゴリズムを含む適当なデジタル・プロセッシング用の設備、例えば、上述した実施形態において説明したようなコンピュータが、400に示されている。ダイナミックなデータベース400は、PGS受信システム410からの3−D瞬間位置情報を受信する。目標サイトモデル420が、適当な方法により、例えば適当なディスク・メモリー上でコンピュータ400のデータベース内にロードされ又は格納される。自動機械制御用モジュール470は、例えば圧縮成形機のステアリング及び駆動システム474,476,478を操作するように接続された電子油圧式機械制御装置472を含んでいる。この自動機械制御装置472は、コンピュータ400内のダイナミックなデータベースから信号を受信することができる。この信号は、実サイトモデル430と目標サイトモデルとの差異を表しており、自動機械制御装置472は、この信号により、実サイトモデルを目標サイトモデルに一致させる方法で圧縮成形機がサイトを横切るように、圧縮成形機のステアリングシステムと駆動システムを操作する。自動機械制御装置472が機械のステアリングシステムと駆動システムを操作している間に、400のダイナミックなデータベースによりサイトの圧縮成形及び圧縮成形機の現在の位置と方向が受信され、読み取られ、さらに操作され、これにより、実サイトモデルが更新される。実サイト更新情報は、データベース400により受信され、このデータベース400は、圧縮成形機のステアリングと駆動のシステムを操作のために機械制御装置472に送信される信号を更新する。このとき、機械制御装置472は、実サイトモデルが目標サイトモデルと一致するようにサイト上を通過させて圧縮成形する。
本発明の方法とシステムが、機械が作業サイト上を移動してリアルタイムでサイトの地形を圧縮成形するようなほぼ全ての圧縮成形作業のモニターと制御に適用できることは、当業者であれば明白である。
Claims (24)
- 移動式サイト圧縮成形機械(10)の作業を指示する装置(120,124,126,128)であって、
サイト(12)の目標の圧縮成形程度を表す第1サイトモデル(420)とサイト(12)の実際の圧縮成形程度を表す第2サイトモデル(430)とを格納するデジタルデータ格納及び検索手段(126)と、
圧縮成形機械(10)がサイト(12)を横切るとき、上記圧縮成形機械(10)の少なくとも一部の3次元の空間内における瞬間の検出位置をリアルタイムで表すデジタル信号を生成する手段(120)と、
上記位置のデジタル信号を受信し且つこのデジタル信号に従って上記第2サイトモデル(430)を更新する手段(124)と、
上記第1サイトモデル(420)と上記第2サイトモデル(430)との差異をリアルタイムで判定する手段(124)と、
上記更新された第2サイトモデル(430)が上記第1サイトモデル(420)と一致するように、上記差異に従って上記圧縮成形機械(10)の操作を指示する手段(128)と、
位置検出と位置検出との間のサイト(12)に対する上記圧縮成形機械(10)の経路をリアルタイムで判定する差分手段(124)と、を有し、
上記差分手段(124)が、上記圧縮成形機械(10)の圧縮成形部分の実際の幅以下の大きさである圧縮成形部分(26,28)の有効幅(530')を判定する手段を含むことを特徴とする装置。 - 上記差分手段(124)が、位置検出と位置検出との間に上記圧縮成形機械(10)の圧縮成形部分が横切ったサイトの領域を判定する手段(540')と、上記圧縮成形部分(26,28)の有効幅部分が横切った領域に従って上記第2サイトモデル(430)を更新する手段(538)とを有する、請求項1に記載の装置。
- 上記第1サイトモデル(420)が、未圧縮成形状態に対するサイト(12)の所定の目標の圧縮成形程度を表し、上記第1サイトモデル(420)と上記第2サイトモデル(430)の差異(124)が、サイト(12)の実際の圧縮成形程度とサイト(12)の目標の圧縮成形程度との差異を表し、
上記第1サイトモデル(420)と第2サイトモデル(430)との差異は、サイト(12)の未圧縮成形状態と目標の圧縮成形程度との間で目標の圧縮成形程度に向かって進行し、上記第1サイトモデル(420)と上記第2サイトモデル(430)との差異を判定する手段(124)が、サイト(12)への未圧縮成形状態の材料の追加を検出し且つ未圧縮成形状態の材料の追加が検出されたところの上記第1サイトモデル(420)と上記第2サイトモデル(430)の差異を、未圧縮成形状態まで戻す手段(554,556,578)を有する、請求項1に記載の装置。 - 上記第1サイトモデル(420)が、未圧縮成形状態に対するサイト(12)の所定の目標の圧縮成形程度を表し、上記第1サイトモデル(420)と上記第2サイトモデル(430)の差異(124)が、サイト(12)の実際の圧縮成形程度とサイト(12)の目標の圧縮成形程度との差異を表し、
上記目標の圧縮成形程度は、上記圧縮成形機械(10)がサイト(12)上を圧縮成形のために通過する回数の関数であり、上記第1サイトモデル(420)と上記第2サイトモデル(430)の差異を判定する手段(124)が、サイト(12)上における上記圧縮成形機械(10)の圧縮成形のための通過(562−590)の回数を判定する手段を有する、請求項1に記載の装置。 - 移動式のサイト圧縮成形機械(10)の作業を指示する方法であって、
サイト(12)の目標の圧縮成形程度を表す第1サイトモデル(420)とサイト(12)の実際の圧縮成形程度を表す第2サイトモデル(430)とを生成してデジタルデータ格納及び検索手段に格納する工程(126)と、
圧縮成形機械(10)がサイト(12)を横切るとき、上記圧縮成形機械(10)の少なくとも一部の3次元の空間内における瞬間の検出位置をリアルタイムで表すデジタル信号を生成する工程(120)と、
上記3次元の位置のデジタル信号に従って上記第2サイトモデル(430)を更新する工程と、
上記第1サイトモデル(420)と上記第2サイトモデル(430)との差異を判定し且つ更新する工程(124)と、
上記更新した第2サイトモデル(430)が上記第1サイトモデル(420)と一致するように、上記差異に従って上記圧縮成形機械(10)の操作を指示する工程(128)と、を有し、
上記第1サイトモデル(420)が、未圧縮成形状態に対するサイト(12)の所定の目標の圧縮成形程度を表し、上記第1サイトモデル(420)と上記第2サイトモデル(430)の差異(124)が、サイト(12)の実際の圧縮成形程度とサイト(12)の目標の圧縮成形程度との差異として判定され、
上記第1サイトモデル(420)と上記第2サイトモデル(430)との差異は、サイト(12)の未圧縮成形状態と目標の圧縮成形程度との間で目標の圧縮成形程度に向かって進行し、上記第1サイトモデル(420)と上記第2サイトモデル(430)の差異を判定する工程が、サイト(12)への未圧縮成形状態の材料の追加を検出し且つ未圧縮成形状態の材料の追加が検出されたところの上記第1サイトモデル(420)と上記第2サイトモデル(430)の差異を、未圧縮成形状態まで戻す工程(554,556)を有することを特徴とする方法。 - 上記目標の圧縮成形程度が、上記圧縮成形機械(10)がサイト(12)上を圧縮成形のために通過する回数の関数として判定される、請求項5に記載の方法。
- 上記圧縮成形機械(10)の位置に従って上記第2サイトモデル(430)を更新する工程が、位置検出と位置検出との間のサイト(12)に対する上記圧縮成形機械(10)の経路をリアルタイムで判定する工程を有し、
上記圧縮成形機械(10)は、サイトと接触する踏み跡を持つ2個の離間した圧縮成形用車輪(26,28)を有し、上記圧縮成形機械(10)の経路をリアルタイムで判定する工程が、位置検出と位置検出との間の上記離間した踏み跡の経路をリアルタイムで判定する工程を有する、請求項5に記載の方法。 - 位置検出と位置検出との間の離間した踏み跡の経路をリアルタイムで判定する上記工程が、位置検出と位置検出との間の上記踏み跡の中心(540')のラインの経路を追跡する工程(514−591)を有する、請求項7に記載の方法。
- 上記圧縮成形機械(10)の位置に従って上記第2サイトモデル(430)を更新する工程が、位置検出と位置検出との間のサイト(12)に対する上記圧縮成形機械(10)の経路をリアルタイムで判定する工程を有し、
更に、上記圧縮成形機械の圧縮成形部分の実際の幅以下の大きさである圧縮成形部分の有効幅(530)を判定する工程を有する、請求項5に記載の方法。 - 更に、位置検出と位置検出との間に上記圧縮成形機械(10)の圧縮成形用部分が横切ったサイトの領域を判定し、上記圧縮成形部分の有効幅部分が横切ったサイトの領域に従って上記第2サイトモデル(430)を更新する工程(540'−548')を有する、請求項9に記載の方法。
- ワークサイト(12)の圧縮成形及びワークサイト上で操作される圧縮成形機械(10)を正確にモニターし且つ制御する(128)システムであって、
サイト(12)を圧縮成形する移動式の圧縮成形機械(10)であって、それがサイト(12)を横切るときに上記圧縮成形機械(10)の少なくとも一部の瞬間の3次元の位置をリアルタイムで正確に判定する位置検出手段(50)を備えている圧縮成形機械と、
上記位置検出手段(50)と通信するデジタルデータ格納用設備(126)と、
上記デジタルデータ格納用設備(126)に格納された、サイトの目標の圧縮成形程度を表す第1サイトモデル(420)及びサイトの実際の圧縮成形程度を表す第2サイトモデル(430)と、
上記デジタルデータ格納用設備(126)及び上記位置検出手段(120)と通信するダイナミックなデータベース手段(124)であって、上記圧縮成形機械がサイト(12)を横切っているとき、サイト(12)に対する上記圧縮成形機械(10)の位置をリアルタイムでモニターし、モニターした上記圧縮成形機械(10)の位置に応答して上記第2サイトモデル(430)をリアルタイムで更新し、更新した第2サイトモデル(430)を上記第1サイトモデル(420)と一致させるように上記圧縮成形機械(10)の操作を指示するために、上記第1サイトモデル(420)と上記第2サイトモデル(420)との間の圧縮成形程度の更新されたリアルタイムの差異を表す信号を生成するダイナミックなデータベース手段と、を有し、
上記ダイナミックなデータベース手段は、位置検出と位置検出との間のサイト(12)に対する上記圧縮成形機械(10)の経路をリアルタイムで判定する差分手段(102)を含み、
上記圧縮成形機械(10)は、連続幅の圧縮成形部分(26,28)を含み、上記ダイナミックなデータベース手段は、上記圧縮成形部分の実際の幅以下も大きさを有する上記圧縮成形部分の有効幅を判定する手段を有することを特徴とするシステム。 - 上記圧縮成形機械(10)が、その第1の位置とそれから離間した第2の位置に配置された位置検出手段(18,18a)を備え、第2の位置に配置された位置検出手段(18a)が、第1の位置に配置された位置検出手段(18)に対する方向基準を提供する、請求項11に記載のシステム。
- 上記差分手段(102)が、位置検出と位置検出との間の圧縮成形部分の中心のラインの経路を判定するBresenhamのアルゴリズムを含む、請求項11に記載のシステム。
- 上記差分手段(102)が、位置検出と位置検出との間に上記圧縮成形機械(10)の圧縮成形部分(26,28)の有効幅部分が横切った経路を判定する“多角形内の充填”アルゴリズム(540')を含む、請求項11に記載のシステム。
- 上記ダイナミックなデータベース手段(400)が、更に、上記圧縮成形機械(10)の圧縮成形部分(26,28)が横切ったサイトの領域(538)に従って、上記第2のサイトモデルをを更新する手段を含む、請求項11に記載のシステム。
- ワークサイト(12)上の移動式の圧縮成形機械(10)の経路をリアルタイムで判定する方法であって、
ユニット領域(71)の連続マトリックスに分割されたサイト(12)のモデル(104)を準備する工程と、
圧縮成形機械(12)がサイト(12)を横切るときに上記圧縮成形機械(12)の少なくとも一部の3次元空間内における位置を検出する手段を上記圧縮成形機械(10)に備える工程と、
上記圧縮成形機械がサイト(12)を横切っている間、上記圧縮成形機械の検出位置(100)をサイトモデル(104)の一連の座標点として追跡する工程と、
上記圧縮成形機械(10)の圧縮成形部分(26,28)の幅を上記サイトモデル(104)のユニット領域(71)の関数として判定する工程と、
座標点の間の上記圧縮成形機械(10)の圧縮成形部分が横切ったサイトモデルのユニット領域からなるサイトに対する上記圧縮成形機械の経路をリアルタイムで判定する工程と、を有し、
位置検出と位置検出との間の上記圧縮成形部分の経路をリアルタイムで判定する上記工程は、位置検出と位置検出との間の上記圧縮成形部分の中心(540)のラインの経路を追跡する工程(514,591)を含む、ことを特徴とする方法。 - 上記圧縮成形機械(10)の圧縮成形部分の幅(530)は、上記圧縮成形部分の実際の幅以下の有効幅として判定され、更に、上記サイトモデル上に表されるときのサイト(12)上の上記圧縮成形機械(10)の経路は、上記圧縮成形部分の有効幅の経路により判定される、請求項16に記載の方法。
- 上記有効幅は、上記圧縮成形機械(10)の圧縮成形部分の有効端を見つけることにより判定され、前記有効端は、上記圧縮成形部分の実際の端から、上記サイトモデルの1つのユニット領域の幅の分数に一致する距離にある、請求項17に記載の方法。
- 上記圧縮成形機械(10)の圧縮成形部分(26,28)が複数の圧縮成形部分を含む、請求項17に記載の方法。
- 3次元の位置信号とデジタル化されたサイトモデルを用いて、3次元の空間内におけるサイト(12)に対する圧縮成形機械(10)の位置を正確に判定し、圧縮成形機械(10)によってサイト上で行われる作業の進展を指令示する方法であって、
位置信号を受信する位置検出手段を圧縮成形機械(10)に備える工程と、
デジタルデータ格納設備(50)内で、サイトの実際の圧縮成形程度を表す実サイトモデル(106)と、サイトの目標の圧縮成形程度の静的3次元モデルである目標サイトモデルとを生成して格納する工程と、
サイト(12)に対する上記圧縮成形機械(10)の少なくとも一部分の3次元の位置に従って、上記デジタルデータ格納設備(126)内の実サイトモデルをリアルタイムで更新すると共に、上記実サイトモデル(430)が更新されたときに上記実サイトモデル(430)と上記目標サイトモデル(420)との差異をリアルタイムで判定して更新しながら、サイト(12)上の上記圧縮成形機械(10)を操作する工程と、を有し、
サイト(12)の圧縮成形程度は、上記圧縮成形機械がサイト(12)上を通過した回数の関数であることを特徴とする方法。 - 上記圧縮成形機械(10)は、上記位置検出手段(18)に対する既知の固定位置でサイトと接触する踏み跡を持つ連続幅の圧縮成形部分を含み、
更に、位置検出と位置検出との間のサイト(12)に対する上記経路をリアルタイムで判定する工程を含む、請求項20に記載の方法。 - 更に、位置検出と位置検出との間の上記圧縮成形機械(10)の圧縮成形部分の中心のラインの経路を判定する工程を含む、請求項21に記載の方法。
- 上記目標サイトモデル(420)は、未圧縮成形状態に対するサイトの目標の圧縮成形程度を表し、上記実サイトモデル(430)と上記目標サイトモデル(420)との差異は、サイト(12)の実際の圧縮成形程度とサイト(12)の実際の圧縮成形程度との差異であり、
上記実サイトモデル(430)と上記目標サイトモデル(420)との差異は、サイト(12)の未圧縮成形状態と目標の圧縮成形程度との間で目標の圧縮成形程度に向かって進行し、上記実サイトモデル(430)と上記目標サイトモデル(420)との差異を判定する工程は、サイト(12)への未圧縮成形材料の追加を検出し、未圧縮成形材料が検出されたところの上記実サイトモデル(430)と上記目標サイトモデル(420)との差異を未圧縮成形状態まで戻す工程を含む、請求項20に記載の方法。 - 3次元の位置信号とデジタル化されたサイトモデルを用いて、3次元の空間内におけるサイト(12)に対する圧縮成形機械(10)の位置を正確に判定し、そのサイトで圧縮成形機械(10)によって行われる作業の進展を指令する装置であって、
サイト(12)を横切っているときに位置信号を受信し且つ少なくとも1つの圧縮成形部分(26,28)の3次元の空間内における瞬間の位置を判定する手段(124)を備えている移動式の圧縮成形機械(10)と、
デジタルデータ格納設備(126)内に格納されている、サイトの圧縮成形程度を表すサイトモデル(430)と、
上記圧縮成形機械の位置を判定する上記手段及び上記デジタルデータ格納設備(126)と通信するダイナミックなデータベース手段(124)であって、サイト(12)に対する上記圧縮成形機械(10)の少なくとも1つの圧縮成形部分(26,28)の3次元の位置に従って、上記デジタルデータ格納設備(126)内のサイトモデルをリアルタイムで更新する手段を含む、ダイナミックなデータベース手段(124)と、を有し、
上記サイトモデルは、サイトの実際の圧縮成形程度を表す実サイトモデル(430)であり、更に、サイトの目標の圧縮成形程度を表す目標サイトモデル(420)が上記デジタルデータ格納用設備(126)内に格納され、
上記ダイナミックなデータベース手段(124)は、上記実サイトモデルが更新されたとき、上記実サイトモデル(430)と上記目標サイトモデル(420)との差異をリアルタイムで判定し且つ更新する差分手段を含み、
上記目標サイトモデル(420)は、未圧縮成形状態に対するサイトの所定の目標の圧縮成形程度を表し、上記実サイトモデル(430)と上記目標サイトモデル(420)との差異が、サイト(12)の実際の圧縮成形程度とサイト(12)の目標の圧縮成形程度の差異を表し、
上記実サイトモデル(430)と上記目標サイトモデル(420)との差異は、未圧縮成形状態と目標の圧縮成形程度の間で目標の圧縮成形程度に向かって進行し、上記実サイトモデル(430)と上記目標サイトモデル(420)との差異を判定する上記手段は、サイト(12)への未圧縮成形材料の追加を検出し、未圧縮成形材料が検出されたところの上記実サイトモデル(430)と上記目標サイトモデル(420)との差異を未圧縮成形状態まで戻す手段を有することを特徴とする装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US08/164,171 US5471391A (en) | 1993-12-08 | 1993-12-08 | Method and apparatus for operating compacting machinery relative to a work site |
| US08/164,171 | 1993-12-08 | ||
| PCT/US1994/012733 WO1995016227A1 (en) | 1993-12-08 | 1994-11-04 | Method and apparatus for operating compacting machinery relative to a work site |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH09508991A JPH09508991A (ja) | 1997-09-09 |
| JP3585237B2 true JP3585237B2 (ja) | 2004-11-04 |
Family
ID=22593296
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP51618795A Expired - Fee Related JP3585237B2 (ja) | 1993-12-08 | 1994-11-04 | ワークサイトで使用される圧縮成形用機械の操作のための方法と装置 |
Country Status (8)
| Country | Link |
|---|---|
| US (2) | US5471391A (ja) |
| EP (1) | EP0733231B1 (ja) |
| JP (1) | JP3585237B2 (ja) |
| AU (2) | AU711136B2 (ja) |
| CA (1) | CA2175339A1 (ja) |
| DE (1) | DE69416006T2 (ja) |
| WO (1) | WO1995016227A1 (ja) |
| ZA (1) | ZA948825B (ja) |
Families Citing this family (140)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ZA948824B (en) * | 1993-12-08 | 1995-07-11 | Caterpillar Inc | Method and apparatus for operating geography altering machinery relative to a work site |
| US5519620A (en) * | 1994-02-18 | 1996-05-21 | Trimble Navigation Limited | Centimeter accurate global positioning system receiver for on-the-fly real-time kinematic measurement and control |
| US5838277A (en) * | 1994-05-20 | 1998-11-17 | Trimble Navigation Limited | GPS-based controller module |
| US5964298A (en) * | 1994-06-13 | 1999-10-12 | Giganet, Inc. | Integrated civil engineering and earthmoving system |
| US5549412A (en) * | 1995-05-24 | 1996-08-27 | Blaw-Knox Construction Equipment Corporation | Position referencing, measuring and paving method and apparatus for a profiler and paver |
| AUPN385195A0 (en) * | 1995-06-29 | 1995-07-20 | Hall, David John | A system for monitoring a movement of a vehicle tool |
| US5862501A (en) * | 1995-08-18 | 1999-01-19 | Trimble Navigation Limited | Guidance control system for movable machinery |
| FR2738022B1 (fr) * | 1995-08-21 | 1997-11-14 | Etat Francais Laboratoire Cent | Procede et materiel d'aide a la conduite d'une machine de compactage |
| US5781874A (en) * | 1995-11-28 | 1998-07-14 | Ingersoll-Rand Company | Control system for a compaction roller vibratory mechanism |
| US5721679A (en) * | 1995-12-18 | 1998-02-24 | Ag-Chem Equipment Co., Inc. | Heads-up display apparatus for computer-controlled agricultural product application equipment |
| US5806016A (en) * | 1996-03-28 | 1998-09-08 | Caterpillar Inc. | Method for determining the course of a machine |
| US5815826A (en) * | 1996-03-28 | 1998-09-29 | Caterpillar Inc. | Method for determining the productivity of an earth moving machines |
| US6122601A (en) * | 1996-03-29 | 2000-09-19 | The Penn State Research Foundation | Compacted material density measurement and compaction tracking system |
| US5801967A (en) * | 1996-03-29 | 1998-09-01 | Caterpillar Inc. | Method for determining the volume between previous and current site surfaces |
| US6064940A (en) * | 1996-05-15 | 2000-05-16 | The Appalos Corporation | Plotter for construction sites and method |
| DE19629618A1 (de) * | 1996-07-23 | 1998-01-29 | Claas Ohg | Routenplanungssystem für landwirtschaftliche Arbeitsfahrzeuge |
| DE19647523A1 (de) * | 1996-11-16 | 1998-05-20 | Claas Ohg | Landwirtschaftliches Nutzfahrzeug mit einem in seiner Lage und/oder Ausrichtung gegenüber dem Fahrzeug verstellbar angeordneten Bearbeitungsgerät |
| US6047227A (en) * | 1996-11-19 | 2000-04-04 | Caterpillar Inc. | Method and apparatus for operating geography altering machinery relative to a work site |
| US5987371A (en) * | 1996-12-04 | 1999-11-16 | Caterpillar Inc. | Apparatus and method for determining the position of a point on a work implement attached to and movable relative to a mobile machine |
| US5935192A (en) * | 1996-12-12 | 1999-08-10 | Caterpillar Inc. | System and method for representing parameters in a work site database |
| US5974348A (en) * | 1996-12-13 | 1999-10-26 | Rocks; James K. | System and method for performing mobile robotic work operations |
| US5864060A (en) * | 1997-03-27 | 1999-01-26 | Caterpillar Inc. | Method for monitoring the work cycle of mobile machinery during material removal |
| US5844160A (en) * | 1997-05-23 | 1998-12-01 | Caterpillar Inc. | Land mine clearing tool |
| US5944764A (en) * | 1997-06-23 | 1999-08-31 | Caterpillar Inc. | Method for monitoring the work cycle of earth moving machinery during material removal |
| US5897603A (en) * | 1997-06-23 | 1999-04-27 | Caterpillar Inc. | Method for determining the relationship between the heading of a machine and the course of machine travel |
| US5945917A (en) * | 1997-12-18 | 1999-08-31 | Rockwell International | Swathing guidance display |
| US5924493A (en) * | 1998-05-12 | 1999-07-20 | Caterpillar Inc. | Cycle planner for an earthmoving machine |
| US6085130A (en) * | 1998-07-22 | 2000-07-04 | Caterpillar Inc. | Method and apparatus for selecting a transition scheme for use in transitioning a mobile machine from a first path to a second path |
| US6112143A (en) * | 1998-08-06 | 2000-08-29 | Caterpillar Inc. | Method and apparatus for establishing a perimeter defining an area to be traversed by a mobile machine |
| US6088644A (en) * | 1998-08-12 | 2000-07-11 | Caterpillar Inc. | Method and apparatus for determining a path to be traversed by a mobile machine |
| US6301551B1 (en) * | 1998-10-01 | 2001-10-09 | Pile Dynamics, Inc. | Remote pile driving analyzer |
| US8478492B2 (en) | 1998-11-27 | 2013-07-02 | Caterpillar Trimble Control Technologies, Inc. | Method and system for performing non-contact based determination of the position of an implement |
| US6236923B1 (en) | 1998-12-09 | 2001-05-22 | Caterpillar Inc. | Method and apparatus for controlling the inflation pressure of a pneumatic compactor |
| US6216071B1 (en) | 1998-12-16 | 2001-04-10 | Caterpillar Inc. | Apparatus and method for monitoring and coordinating the harvesting and transporting operations of an agricultural crop by multiple agricultural machines on a field |
| US6189626B1 (en) | 1998-12-21 | 2001-02-20 | Trimble Navigation Ltd. | Method and apparatus for accurately positioning a tool on a mobile machine using on-board positioning system and off-board adjustable laser reference |
| US6460006B1 (en) | 1998-12-23 | 2002-10-01 | Caterpillar Inc | System for predicting compaction performance |
| FR2789770B1 (fr) * | 1999-02-12 | 2001-03-23 | Gtm Construction | Procede de realisation utilisant un systeme de positionnement global |
| US6188942B1 (en) | 1999-06-04 | 2001-02-13 | Caterpillar Inc. | Method and apparatus for determining the performance of a compaction machine based on energy transfer |
| US6690134B1 (en) * | 2001-01-24 | 2004-02-10 | Irobot Corporation | Method and system for robot localization and confinement |
| US6520715B1 (en) * | 2001-08-10 | 2003-02-18 | John Paul Smith | Asphalt delivery and compaction system |
| US6597992B2 (en) * | 2001-11-01 | 2003-07-22 | Soil And Topography Information, Llc | Soil and topography surveying |
| US6701239B2 (en) | 2002-04-10 | 2004-03-02 | Caterpillar Inc | Method and apparatus for controlling the updating of a machine database |
| EP1541772B1 (en) * | 2002-09-17 | 2015-08-05 | Hitachi Construction Machinery Co., Ltd. | Excavation teaching apparatus for construction machine |
| CN1764757B (zh) * | 2003-02-13 | 2010-12-08 | 先进铺筑技术有限公司 | 在要被铺设的表面上沉积沥青垫层的方法 |
| US7089174B2 (en) * | 2003-02-21 | 2006-08-08 | Arm Limited | Modelling device behaviour using a first model, a second model and stored valid behaviour |
| FR2852112B1 (fr) * | 2003-03-04 | 2008-10-03 | Giat Ind Sa | Dispositif d'aide au franchissement d'obstacles |
| JP4233932B2 (ja) * | 2003-06-19 | 2009-03-04 | 日立建機株式会社 | 作業機械の作業支援・管理システム |
| US7054731B1 (en) | 2003-08-29 | 2006-05-30 | Trimble Navigation Limited | Farm implement guidance method and apparatus |
| US7593798B2 (en) * | 2003-10-30 | 2009-09-22 | Deere & Company | Vehicular guidance system having compensation for variations in ground elevation |
| US6845311B1 (en) | 2003-11-04 | 2005-01-18 | Caterpillar Inc. | Site profile based control system and method for controlling a work implement |
| US7079931B2 (en) * | 2003-12-10 | 2006-07-18 | Caterpillar Inc. | Positioning system for an excavating work machine |
| US7191062B2 (en) * | 2003-12-22 | 2007-03-13 | Caterpillar Inc | Method and system of forecasting compaction performance |
| US6973821B2 (en) * | 2004-02-19 | 2005-12-13 | Caterpillar Inc. | Compaction quality assurance based upon quantifying compactor interaction with base material |
| CA2506374A1 (en) * | 2004-05-06 | 2005-11-06 | Alan Williams | Monitoring compression of successive layers of landfill material and measurement of layer density |
| EP1600564A1 (de) * | 2004-05-24 | 2005-11-30 | Leica Geosystems AG | Verfahren zur Steuerung einer oberflächenverändernden Maschine |
| US20050283294A1 (en) * | 2004-06-16 | 2005-12-22 | Lehman Allen A Jr | Method and apparatus for machine guidance at a work site |
| US7706917B1 (en) | 2004-07-07 | 2010-04-27 | Irobot Corporation | Celestial navigation system for an autonomous robot |
| US8972052B2 (en) | 2004-07-07 | 2015-03-03 | Irobot Corporation | Celestial navigation system for an autonomous vehicle |
| US10458099B2 (en) | 2004-08-26 | 2019-10-29 | Caterpillar Trimble Control Technologies Llc | Auto recognition of at least one standoff target to determine position information for a mobile machine |
| US7428455B2 (en) * | 2004-10-12 | 2008-09-23 | Caterpillar Inc. | Compaction indication by effective rolling radius |
| JP2006132132A (ja) * | 2004-11-04 | 2006-05-25 | Hitachi Constr Mach Co Ltd | 作業管理装置及びこれを備えた作業機械 |
| US7184926B2 (en) * | 2005-03-16 | 2007-02-27 | Trimble Navigation Limited | Method for estimating the orientation of a machine |
| US7881862B2 (en) * | 2005-03-28 | 2011-02-01 | Sap Ag | Incident command post |
| US7860628B2 (en) | 2005-06-09 | 2010-12-28 | Trimble Navigation Limited | System for guiding a farm implement between swaths |
| US7610122B2 (en) * | 2005-08-16 | 2009-10-27 | Deere & Company | Mobile station for an unmanned vehicle |
| US20070044980A1 (en) * | 2005-08-31 | 2007-03-01 | Caterpillar Inc. | System for controlling an earthworking implement |
| US20070150147A1 (en) * | 2005-12-23 | 2007-06-28 | Rasmussen Terry L | Compactor using compaction value targets |
| US7689351B2 (en) * | 2006-03-31 | 2010-03-30 | Topcon Positioning Systems, Inc. | Virtual profilograph for road surface quality assessment |
| US20070239338A1 (en) * | 2006-04-06 | 2007-10-11 | Dean Potts | Worksite preparation method using compaction response and mapping information |
| US7623951B2 (en) * | 2006-04-06 | 2009-11-24 | Caterpillar Inc. | Machine and method of determining suitability of work material for compaction |
| DE102006019841B3 (de) * | 2006-04-28 | 2007-12-20 | Moba-Mobile Automation Ag | Vorrichtung und Verfahren zur Ermittlung der Position einer Straßenwalze relativ zu einem Straßenfertiger |
| US7725234B2 (en) * | 2006-07-31 | 2010-05-25 | Caterpillar Inc. | System for controlling implement position |
| US7731450B2 (en) * | 2006-09-07 | 2010-06-08 | Caterpillar Inc. | Method of operating a compactor machine via path planning based on compaction state data and mapping information |
| US7844378B2 (en) | 2006-10-05 | 2010-11-30 | Trimble Navigation Limited | Farm apparatus having implement sidehill drift compensation |
| US7865285B2 (en) | 2006-12-27 | 2011-01-04 | Caterpillar Inc | Machine control system and method |
| US7908062B2 (en) | 2007-02-28 | 2011-03-15 | Caterpillar Inc. | System and method for preparing a worksite based on soil moisture map data |
| US8083004B2 (en) | 2007-03-29 | 2011-12-27 | Caterpillar Inc. | Ripper autodig system implementing machine acceleration control |
| US8073791B2 (en) | 2007-04-20 | 2011-12-06 | Mark Williams | Vertical curve system for surface grading |
| DE102007019419A1 (de) * | 2007-04-23 | 2008-10-30 | Hamm Ag | Verfahren zur Bestimmung eines Verdichtungsgrades von Asphalten sowie System zur Bestimmung eines Verdichtungsgrades |
| US7778808B2 (en) * | 2007-04-24 | 2010-08-17 | Harris Corporation | Geospatial modeling system providing data thinning of geospatial data points and related methods |
| US20080267719A1 (en) * | 2007-04-24 | 2008-10-30 | Caterpillar Inc. | Towed compaction determination system utilizing drawbar force |
| KR100877072B1 (ko) * | 2007-06-28 | 2009-01-07 | 삼성전자주식회사 | 이동 로봇을 위한 맵 생성 및 청소를 동시에 수행하는 방법및 장치 |
| WO2009011630A1 (en) * | 2007-07-13 | 2009-01-22 | Volvo Construction Equipment Ab | A method for providing an operator of a work machine with operation instructions and a computer program for implementing the method |
| DE102007053610A1 (de) | 2007-11-08 | 2009-05-14 | Humboldt-Universität Zu Berlin | Verfahren zur Bestimmung der Verdichtung in landwirtschaftlichen Horizontalsilos |
| US8099218B2 (en) * | 2007-11-30 | 2012-01-17 | Caterpillar Inc. | Paving system and method |
| US20090177337A1 (en) * | 2008-01-07 | 2009-07-09 | Caterpillar Inc. | Tool simulation system for remotely located machine |
| US8351684B2 (en) * | 2008-02-13 | 2013-01-08 | Caterpillar Inc. | Terrain map updating system |
| US20090219199A1 (en) * | 2008-02-29 | 2009-09-03 | Caterpillar Inc. | Positioning system for projecting a site model |
| US8190338B2 (en) * | 2008-09-02 | 2012-05-29 | The Board Of Regents Of The University Of Oklahoma | Method and apparatus for compaction of roadway materials |
| US8116950B2 (en) * | 2008-10-07 | 2012-02-14 | Caterpillar Inc. | Machine system and operating method for compacting a work area |
| US8639408B2 (en) * | 2008-10-15 | 2014-01-28 | Deere & Company | High integrity coordination system for multiple off-road vehicles |
| US8437901B2 (en) * | 2008-10-15 | 2013-05-07 | Deere & Company | High integrity coordination for multiple off-road vehicles |
| US20100129152A1 (en) * | 2008-11-25 | 2010-05-27 | Trimble Navigation Limited | Method of covering an area with a layer of compressible material |
| DE102008063852A1 (de) | 2008-12-19 | 2010-07-08 | Claas Selbstfahrende Erntemaschinen Gmbh | Verfahren zur Steuerung der Verdichtung eines landwirtschaftlichen Guts in einem Fahr- bzw. Flachsilo und Verdichtungsfahrzeug |
| US20100250123A1 (en) * | 2009-03-30 | 2010-09-30 | Caterpillar Inc. | Method and system for dispensing material from machines |
| AU2010305329B2 (en) * | 2009-10-09 | 2015-12-24 | Technological Resources Pty Limited | A mine operation monitoring system |
| US20110148856A1 (en) | 2009-12-18 | 2011-06-23 | Caterpillar Inc. | Parameter Visualization System |
| US8364405B2 (en) | 2009-12-18 | 2013-01-29 | Caterpillar Inc. | Surface mapping system and method |
| US8635903B2 (en) | 2009-12-22 | 2014-01-28 | Caterpillar Paving Products Inc. | Method and system for compaction measurement |
| US20110213529A1 (en) * | 2010-02-26 | 2011-09-01 | Caterpillar Inc. | System and method for determing a position on an implement relative to a reference position on a machine |
| EP2514873B8 (de) | 2011-04-18 | 2020-05-06 | Joseph Vögele AG | Verfahren und System zum Aufbringen eines Strassenbelages |
| EP2514871B1 (de) | 2011-04-18 | 2016-05-11 | Joseph Vögele AG | Verfahren zum Einbauen und Verdichten einer Asphaltschicht |
| PL2515195T3 (pl) | 2011-04-18 | 2014-10-31 | Joseph Voegele Ag | System do sterowania pojazdami placu budowy |
| EP2515255A1 (de) | 2011-04-18 | 2012-10-24 | Joseph Vögele AG | Tragbares Lesegerät für Kennzeichnung eines Baustellenfahrzeugs |
| PL2562309T3 (pl) * | 2011-08-22 | 2014-09-30 | Joseph Voegele Ag | Wykańczarka z urządzeniem pomiarowym |
| DE102011117860A1 (de) | 2011-11-08 | 2013-05-08 | Claas Selbstfahrende Erntemaschinen Gmbh | Verfahren und System zum Ernten und Silieren von Futtermaterial |
| US20130136539A1 (en) * | 2011-11-30 | 2013-05-30 | James Alvin Aardema | Paving system utilizing embedded measuring devices |
| US20130136535A1 (en) * | 2011-11-30 | 2013-05-30 | James A. Aardema | Paving system utilizing capsules enclosing a dye |
| US20130311153A1 (en) * | 2012-05-15 | 2013-11-21 | Caterpillar Inc. | Virtual environment and method for sorting among potential route plans for operating autonomous machine at work site |
| DE102012208554A1 (de) * | 2012-05-22 | 2013-11-28 | Hamm Ag | Verfahren zur Planung und Durchführung von Bodenverdichtungsvorgängen, insbesondere zurAsphaltverdichtung |
| JP5789279B2 (ja) * | 2013-04-10 | 2015-10-07 | 株式会社小松製作所 | 掘削機械の施工管理装置、油圧ショベルの施工管理装置、掘削機械及び施工管理システム |
| US9234317B2 (en) * | 2013-09-25 | 2016-01-12 | Caterpillar Inc. | Robust system and method for forecasting soil compaction performance |
| US9234329B2 (en) * | 2014-02-21 | 2016-01-12 | Caterpillar Inc. | Adaptive control system and method for machine implements |
| US10114348B2 (en) | 2014-05-12 | 2018-10-30 | Deere & Company | Communication system for closed loop control of a worksite |
| US9772625B2 (en) * | 2014-05-12 | 2017-09-26 | Deere & Company | Model referenced management and control of a worksite |
| US20160076205A1 (en) * | 2014-09-16 | 2016-03-17 | Caterpillar Paving Products Inc. | Device and Process for Controlling Compaction Based on Previously Mapped Data |
| US20160222602A1 (en) * | 2015-01-30 | 2016-08-04 | Caterpillar Paving Products Inc. | Systems and methods for guiding a compacting machine |
| US9868211B2 (en) | 2015-04-09 | 2018-01-16 | Irobot Corporation | Restricting movement of a mobile robot |
| US9567731B2 (en) * | 2015-05-18 | 2017-02-14 | Caterpillar Inc. | Implement position calibration using compaction factor |
| JP6322612B2 (ja) * | 2015-10-05 | 2018-05-09 | 株式会社小松製作所 | 施工管理システム及び形状計測方法 |
| DE102015122149A1 (de) * | 2015-12-17 | 2017-06-22 | Ammann Schweiz Ag | Verfahren zum autonomen Betrieb einer Verdichtungsvorrichtung |
| US9765488B2 (en) * | 2015-12-21 | 2017-09-19 | Caterpillar Paving Products Inc. | Compaction effort adjustment using vibration sensors |
| US9903078B2 (en) * | 2016-02-08 | 2018-02-27 | The Florida International University Board Of Trustees | Three dimensional paving |
| DE102016203076A1 (de) | 2016-02-26 | 2017-08-31 | Robert Bosch Gmbh | Markierungsvorrichtung zur Lokalisierung eines Objekts |
| DE102016203077A1 (de) | 2016-02-26 | 2017-08-31 | Robert Bosch Gmbh | System und Verfahren zum Lokalisieren |
| EP3216979B1 (de) * | 2016-03-07 | 2019-05-08 | Kern Tunneltechnik SA | Schalungssystem |
| US9903077B2 (en) * | 2016-04-04 | 2018-02-27 | Caterpillar Paving Products Inc. | System and method for performing a compaction operation |
| DE102016224348B4 (de) | 2016-12-07 | 2021-09-16 | Moba Mobile Automation Ag | System zur Verdichtungskontrolle |
| DE102017110471A1 (de) | 2017-05-15 | 2018-11-15 | Claas Kommanditgesellschaft auf Aktien mbH | Verfahren zum Verdichten von in einem Silo befindlichem Erntegut |
| DE102017216549A1 (de) | 2017-09-19 | 2019-03-21 | Robert Bosch Gmbh | Innerhalb und außerhalb von Gebäuden verwendbare Markierungsvorrichtung zur Lokalisierung von Objekten |
| DE102017216546A1 (de) | 2017-09-19 | 2019-03-21 | Robert Bosch Gmbh | Lokalisierung von Objekten mit ad-hoc einrichtbaren Signalstationen |
| US10640943B2 (en) | 2017-12-14 | 2020-05-05 | Caterpillar Paving Products Inc. | System and method for compacting a worksite surface |
| US11199845B2 (en) | 2019-03-05 | 2021-12-14 | Cnh Industrial America Llc | System and method for distributing and compressing crop material for ensilage |
| US11076626B2 (en) | 2019-03-05 | 2021-08-03 | Cnh Industrial America Llc | System and method for distributing and compressing crop material for ensilage |
| US12353210B2 (en) | 2019-07-25 | 2025-07-08 | Ag Leader Technology | Apparatus, systems and methods for automated navigation of agricultural equipment |
| US11236492B1 (en) * | 2020-08-25 | 2022-02-01 | Built Robotics Inc. | Graphical user interface for real-time management of an earth shaping vehicle |
| FI20206380A1 (en) * | 2020-12-29 | 2022-06-30 | Novatron Oy | A method for compacting the soil and a soil compactor |
| US12403950B2 (en) | 2021-04-19 | 2025-09-02 | Ag Leader Technology | Automatic steering systems and methods |
| US12252849B2 (en) | 2022-04-08 | 2025-03-18 | Caterpillar Paving Products Inc. | Active path monitoring control system and method for compactor |
| DE102022211957A1 (de) * | 2022-11-11 | 2024-05-16 | Robert Bosch Gesellschaft mit beschränkter Haftung | Verfahren zum Betreiben einer Erdbaumaschine, Vorrichtung und Erdbaumaschine |
Family Cites Families (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4380050A (en) * | 1980-06-30 | 1983-04-12 | Tanner Jesse H | Aircraft location and collision avoidance system |
| JPS5921835A (ja) * | 1982-07-29 | 1984-02-03 | Komatsu Zoki Kk | 地面を所定の形状に仕上げる施工方法 |
| JPS6084610A (ja) * | 1983-10-17 | 1985-05-14 | Hitachi Ltd | 誘導装置 |
| FR2555624B1 (fr) * | 1983-11-28 | 1986-12-26 | Syndicat Nal Entr Drainage | Procede et appareillage pour le guidage automatique des engins de terrassement, notamment d'une machine de pose d'elements de drainage |
| US4814711A (en) * | 1984-04-05 | 1989-03-21 | Deseret Research, Inc. | Survey system and method for real time collection and processing of geophysicals data using signals from a global positioning satellite network |
| US4831539A (en) * | 1984-04-27 | 1989-05-16 | Hagenbuch Roy George Le | Apparatus and method for locating a vehicle in a working area and for the on-board measuring of parameters indicative of vehicle performance |
| US4965586A (en) * | 1984-08-16 | 1990-10-23 | Geostar Corporation | Position determination and message transfer system employing satellites and stored terrain map |
| US4820041A (en) * | 1986-11-12 | 1989-04-11 | Agtek Development Co., Inc. | Position sensing system for surveying and grading |
| US4807131A (en) * | 1987-04-28 | 1989-02-21 | Clegg Engineering, Inc. | Grading system |
| US4982329A (en) * | 1987-06-27 | 1991-01-01 | Shinko Electric Co., Ltd. | Self-contained unmanned vehicle |
| US5287280A (en) * | 1987-09-14 | 1994-02-15 | Kabushiki Kaisha Komatsu Seisakusho | Method and apparatus for controlling shoe slip of crawler vehicle |
| US4915757A (en) * | 1988-05-05 | 1990-04-10 | Spectra-Physics, Inc. | Creation of three dimensional objects |
| JP2568109B2 (ja) * | 1988-06-13 | 1996-12-25 | 株式会社小松製作所 | 地形情報表示装置 |
| JP2523005B2 (ja) * | 1988-11-29 | 1996-08-07 | 株式会社小松製作所 | 建設作業の管制システム |
| JP2772551B2 (ja) * | 1989-07-31 | 1998-07-02 | 大成建設株式会社 | 総合工事管理方法 |
| US5148110A (en) * | 1990-03-02 | 1992-09-15 | Helms Ronald L | Method and apparatus for passively detecting the depth and location of a spatial or temporal anomaly by monitoring a time varying signal emanating from the earths surface |
| DE4011316A1 (de) * | 1990-04-07 | 1991-10-17 | Rheinische Braunkohlenw Ag | Verfahren zur bestimmung der geodaetischen standortes von teilen eines ortsbeweglichen grossgeraetes |
| JPH0470584A (ja) * | 1990-07-11 | 1992-03-05 | Mitsubishi Electric Corp | 衛星航法装置 |
| US5100229A (en) * | 1990-08-17 | 1992-03-31 | Spatial Positioning Systems, Inc. | Spatial positioning system |
| JPH04174388A (ja) * | 1990-11-06 | 1992-06-22 | Komatsu Ltd | 建設機械の監視装置 |
| DE4133392C1 (en) * | 1991-10-09 | 1992-12-24 | Rheinbraun Ag, 5000 Koeln, De | Determining progress of mining material spreader - receiving signals from at least four satellites at end of tipping arm and at vehicle base and calculating actual geodetic positions and height of material tip |
| US5359521A (en) * | 1992-12-01 | 1994-10-25 | Caterpillar Inc. | Method and apparatus for determining vehicle position using a satellite based navigation system |
| US5334987A (en) * | 1993-04-01 | 1994-08-02 | Spectra-Physics Laserplane, Inc. | Agricultural aircraft control system using the global positioning system |
| US5375663A (en) * | 1993-04-01 | 1994-12-27 | Spectra-Physics Laserplane, Inc. | Earthmoving apparatus and method for grading land providing continuous resurveying |
-
1993
- 1993-12-08 US US08/164,171 patent/US5471391A/en not_active Expired - Lifetime
-
1994
- 1994-10-13 US US08/322,816 patent/US5493494A/en not_active Expired - Lifetime
- 1994-11-04 AU AU10502/95A patent/AU711136B2/en not_active Ceased
- 1994-11-04 CA CA002175339A patent/CA2175339A1/en not_active Abandoned
- 1994-11-04 WO PCT/US1994/012733 patent/WO1995016227A1/en not_active Ceased
- 1994-11-04 DE DE69416006T patent/DE69416006T2/de not_active Expired - Lifetime
- 1994-11-04 EP EP95901150A patent/EP0733231B1/en not_active Expired - Lifetime
- 1994-11-04 JP JP51618795A patent/JP3585237B2/ja not_active Expired - Fee Related
- 1994-11-08 ZA ZA948825A patent/ZA948825B/xx unknown
-
1999
- 1999-09-02 AU AU47348/99A patent/AU4734899A/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| CA2175339A1 (en) | 1995-06-15 |
| AU4734899A (en) | 1999-11-11 |
| DE69416006T2 (de) | 1999-08-19 |
| EP0733231B1 (en) | 1999-01-13 |
| AU711136B2 (en) | 1999-10-07 |
| US5493494A (en) | 1996-02-20 |
| US5471391A (en) | 1995-11-28 |
| WO1995016227A1 (en) | 1995-06-15 |
| ZA948825B (en) | 1995-07-11 |
| AU1050295A (en) | 1995-06-27 |
| DE69416006D1 (de) | 1999-02-25 |
| JPH09508991A (ja) | 1997-09-09 |
| EP0733231A1 (en) | 1996-09-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3585237B2 (ja) | ワークサイトで使用される圧縮成形用機械の操作のための方法と装置 | |
| EP0756653B1 (en) | Method and apparatus for monitoring and coordination of multiple geography-altering machines on a work site | |
| US6047227A (en) | Method and apparatus for operating geography altering machinery relative to a work site | |
| US5631658A (en) | Method and apparatus for operating geography-altering machinery relative to a work site | |
| JP3662587B2 (ja) | 作業機械の位置と方向を決定する方法と装置 | |
| US5850341A (en) | Method and apparatus for monitoring material removal using mobile machinery | |
| US7513070B2 (en) | Work support and management system for working machine | |
| CA2371756C (en) | Real-time surveying/earth moving system | |
| US5404661A (en) | Method and apparatus for determining the location of a work implement | |
| AU702626B2 (en) | Method and apparatus for operating geography-altering machinery relative to work site |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20040720 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20040803 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20070813 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20080813 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090813 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100813 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110813 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120813 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130813 Year of fee payment: 9 |
|
| LAPS | Cancellation because of no payment of annual fees |