JP2025041211A - 情報処理システム、情報処理方法及びプログラム - Google Patents
情報処理システム、情報処理方法及びプログラム Download PDFInfo
- Publication number
- JP2025041211A JP2025041211A JP2023148371A JP2023148371A JP2025041211A JP 2025041211 A JP2025041211 A JP 2025041211A JP 2023148371 A JP2023148371 A JP 2023148371A JP 2023148371 A JP2023148371 A JP 2023148371A JP 2025041211 A JP2025041211 A JP 2025041211A
- Authority
- JP
- Japan
- Prior art keywords
- dimensional position
- dimensional
- image data
- image
- feature points
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Landscapes
- Image Analysis (AREA)
Abstract
【解決手段】情報処理装置10は、三次元位置及び撮像方向が特定されている第1撮像装置1が撮像した物体Oの第1画像データに基づいて、物体Oの特徴を示す複数の特徴点それぞれの三次元位置を特定する三次元位置特定部153と、第2撮像装置2の三次元位置及び撮像方向を示す撮像装置情報を取得する装置情報取得部151と、第2撮像装置2が撮像した物体Oの第2画像データを取得する第2画像取得部155と、第2撮像装置2の三次元位置及び撮像方向と、特定された複数の特徴点それぞれの三次元位置とに基づいて、第2画像データが示す画像における複数の特徴点それぞれの二次元位置を特定する二次元位置特定部154と、第2画像データと、特定された複数の特徴点それぞれの二次元位置とを含むデータセットを生成する生成部156と、を有する。
【選択図】図2
Description
図1は、情報処理システムSの概要を示す図である。情報処理システムSは、第1撮像装置1と、複数の第2撮像装置2と、情報処理装置10とを有する。情報処理システムSは、三次元空間に配置されている物体Oを第2撮像装置2が撮像することにより生成された画像データと、当該画像データが示す画像に写る物体Oの複数の特徴点の当該画像データにおける二次元位置とを含むデータセットを生成するシステムである。
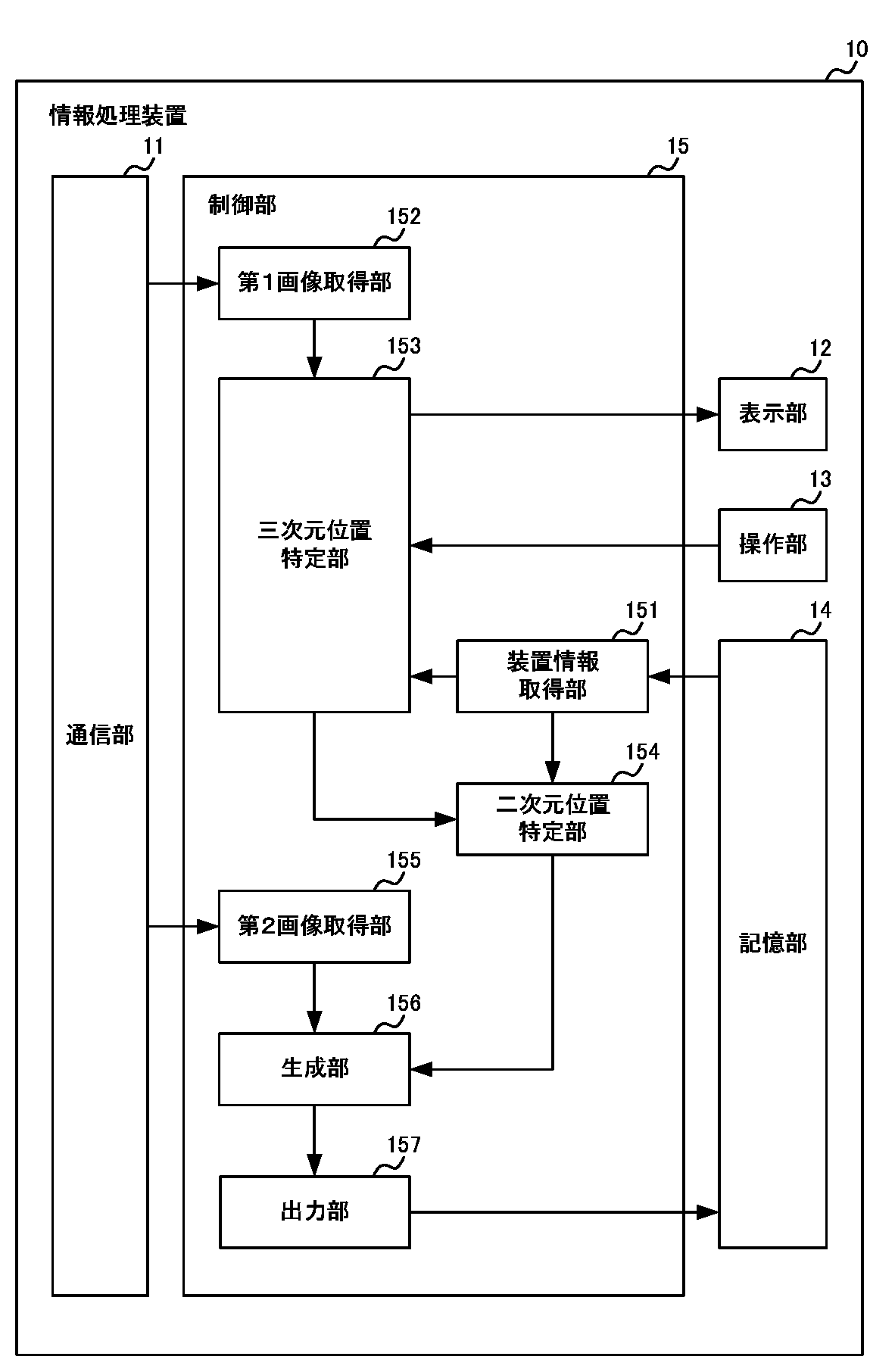
続いて、情報処理装置10の構成の詳細を説明する。図2は、情報処理装置10の機能構成を示す図である。情報処理装置10は、通信部11と、表示部12と、操作部13と、記憶部14と、制御部15とを有する。
操作部13は、マウスやキーボード等のユーザの操作を受け付ける入力デバイスである。
続いて、情報処理装置10の処理の流れについて説明する。図4は、情報処理装置10における処理の流れの一例を示すフローチャートである。本フローチャートでは、物体Oを回転テーブルに配置させておき、回転テーブルを回転させながら物体Oの複数の向きそれぞれに対応するデータセットを生成するときの処理の流れについて説明する。
続いて、第1画像取得部152は、複数の第1撮像装置1それぞれが撮像した物体Oの画像データである第1画像データを取得する(S2)。また、第2画像取得部155は、複数の第2撮像装置2それぞれが撮像した物体Oの画像データである第2画像データを取得する(S3)。
続いて、二次元位置特定部154は、S1において取得された撮像装置情報が示す複数の第2撮像装置2それぞれの三次元位置及び撮像方向と、S4において特定された物体Oの複数の特徴点それぞれの三次元位置とに基づいて、複数の第2撮像装置2それぞれが物体Oを撮像した場合に生成される第2画像データに対応する物体Oの複数の特徴点それぞれの二次元位置を特定する(S5)。
なお、上述の説明では、情報処理装置10に複数の第2撮像装置2が接続され、生成部156が、複数の第2撮像装置2それぞれが撮像した第2画像データと、二次元位置特定部154が当該第2画像データに対して特定した複数の特徴点それぞれの二次元位置とを含むデータセットを生成することとしたが、これに限らない。情報処理装置10には、1台の第2撮像装置2が接続され、生成部156が、1台の第2撮像装置2が撮像した第2画像データと、当該第2画像データが生成された状態と同じ状態で物体Oが撮像された第1画像データに基づいて二次元位置特定部154が特定した複数の特徴点それぞれの二次元位置とを含むデータセットを生成してもよい。
以上説明したように、本実施形態に係る情報処理システムSにおいて、情報処理装置10は、三次元空間における三次元位置及び撮像方向が特定されている第1撮像装置1が撮像した物体Oの画像データである第1画像データに基づいて、物体Oの特徴を示す複数の特徴点それぞれの三次元位置を特定し、物体Oを撮像する第2撮像装置2の三次元位置及び撮像方向と、特定した複数の特徴点それぞれの三次元位置とに基づいて、第2撮像装置2が撮像した物体Oの画像データである第2画像データが示す画像における複数の特徴点それぞれの二次元位置を特定する。そして、情報処理装置10は、第2撮像装置が撮像した第2画像データと、特定した複数の特徴点それぞれの二次元位置とを含むデータセットを生成する。このようにすることで、情報処理装置10は、物体の特徴点の位置を推定するための推定モデルの学習に用いるデータセットを効率よく生成することができる。
2 第2撮像装置
10 情報処理装置
11 通信部
12 表示部
13 操作部
14 記憶部
15 制御部
151 装置情報取得部
152 第1画像取得部
153 三次元位置特定部
154 二次元位置特定部
155 第2画像取得部
156 生成部
157 出力部
S 情報処理システム
Claims (8)
- 三次元空間における三次元位置及び撮像方向が特定されている第1撮像装置が撮像した前記三次元空間に配置されている物体の画像データである第1画像データに基づいて、前記物体の特徴を示す複数の特徴点それぞれの三次元位置を特定する三次元位置特定部と、
前記三次元空間において前記物体を撮像する第2撮像装置の三次元位置及び撮像方向を示す撮像装置情報を取得する装置情報取得部と、
前記第2撮像装置が撮像した前記物体の画像データである第2画像データを取得する画像取得部と、
前記装置情報取得部が取得した前記撮像装置情報が示す前記第2撮像装置の三次元位置及び撮像方向と、前記三次元位置特定部が特定した前記複数の特徴点それぞれの三次元位置とに基づいて、前記第2撮像装置が前記物体を撮像した場合に生成される前記第2画像データが示す画像における前記複数の特徴点それぞれの二次元位置を特定する二次元位置特定部と、
前記画像取得部が取得した前記第2画像データと、前記二次元位置特定部が特定した前記複数の特徴点それぞれの前記二次元位置とを含むデータセットを生成する生成部と、
を有する情報処理システム。 - 前記物体の複数の特徴点それぞれに対応する位置に、前記三次元位置特定部が当該位置を特定するためのマーカーが付されており、
前記三次元位置特定部は、前記第1撮像装置が撮像した前記第1画像データに基づいて、前記複数の特徴点それぞれに対応する複数の前記マーカーの三次元位置を特定し、特定した複数の前記マーカーそれぞれの三次元位置に基づいて前記複数の特徴点それぞれの三次元位置を特定する、
請求項1に記載の情報処理システム。 - 前記三次元位置特定部は、前記物体と前記マーカーを示す三次元モデルを配置した三次元仮想空間を表示部に表示させ、前記三次元仮想空間において、前記マーカーに対応する前記特徴点の指定を受け付けることにより、前記特徴点の三次元位置を特定する、
請求項2に記載の情報処理システム。 - 前記生成部は、前記第2画像データから前記マーカーを消去し、前記マーカーを消去した後の前記第2画像データと、前記二次元位置特定部が特定した前記複数の特徴点それぞれの前記二次元位置とを含むデータセットを生成する、
請求項2に記載の情報処理システム。 - 前記装置情報取得部は、前記三次元空間において前記物体を撮像する複数の前記第2撮像装置それぞれに対応する前記撮像装置情報を取得し、
前記画像取得部は、複数の前記第2撮像装置それぞれが撮像した前記第2画像データを取得し、
前記二次元位置特定部は、複数の前記第2撮像装置それぞれに対応する前記撮像装置情報が示す前記第2撮像装置の三次元位置及び撮像方向と、前記三次元位置特定部が特定した前記複数の特徴点それぞれの三次元位置とに基づいて、複数の前記第2撮像装置それぞれが前記物体を撮像した場合に生成される前記第2画像データが示す画像における前記複数の特徴点それぞれの二次元位置を特定し、
前記生成部は、複数の前記第2撮像装置それぞれが撮像した前記第2画像データと、前記二次元位置特定部が当該第2画像データに対して特定した前記複数の特徴点それぞれの前記二次元位置とを含むデータセットを生成する、
請求項1に記載の情報処理システム。 - 前記三次元位置特定部は、前記物体の向きを変化させた場合における、前記物体の複数の向きそれぞれに対応する前記第1画像データに基づいて、前記複数の向きそれぞれに対応する前記物体の前記特徴点の三次元位置を特定し、
前記画像取得部は、前記第2撮像装置が撮像した前記物体の複数の向きそれぞれに対応する前記第2画像データを取得し、
前記二次元位置特定部は、前記撮像装置情報が示す前記第2撮像装置の三次元位置及び撮像方向と、前記三次元位置特定部が特定した前記物体の複数の向きそれぞれに対応する前記複数の特徴点それぞれの三次元位置とに基づいて、前記画像取得部が取得した前記物体の複数の向きそれぞれに対応する前記第2画像データが示す画像における前記複数の特徴点それぞれの二次元位置を特定し、
前記生成部は、前記物体の複数の向きそれぞれに対応する前記第2画像データと、前記二次元位置特定部が当該第2画像データに対して特定した前記複数の特徴点それぞれの前記二次元位置とを含むデータセットを生成する、
請求項1に記載の情報処理システム。 - コンピュータが実行する、
三次元空間における三次元位置及び撮像方向が特定されている第1撮像装置が撮像した前記三次元空間に配置されている物体の画像データである第1画像データに基づいて、前記物体の特徴を示す複数の特徴点それぞれの三次元位置を特定するステップと、
前記三次元空間において前記物体を撮像する第2撮像装置の三次元位置及び撮像方向を示す撮像装置情報を取得するステップと、
前記第2撮像装置が撮像した前記物体の画像データである第2画像データを取得するステップと、
取得した前記撮像装置情報が示す前記第2撮像装置の三次元位置及び撮像方向と、特定した前記複数の特徴点それぞれの三次元位置とに基づいて、前記第2撮像装置が前記物体を撮像した場合に生成される前記第2画像データが示す画像における前記複数の特徴点それぞれの二次元位置を特定するステップと、
取得した前記第2画像データと、特定した前記複数の特徴点それぞれの前記二次元位置とを含むデータセットを生成するステップと、
を有する情報処理方法。 - コンピュータを、
三次元空間における三次元位置及び撮像方向が特定されている第1撮像装置が撮像した前記三次元空間に配置されている物体の画像データである第1画像データに基づいて、前記物体の特徴を示す複数の特徴点それぞれの三次元位置を特定する三次元位置特定部、
前記三次元空間において前記物体を撮像する第2撮像装置の三次元位置及び撮像方向を示す撮像装置情報を取得する装置情報取得部、
前記第2撮像装置が撮像した前記物体の画像データである第2画像データを取得する画像取得部、
前記装置情報取得部が取得した前記撮像装置情報が示す前記第2撮像装置の三次元位置及び撮像方向と、前記三次元位置特定部が特定した前記複数の特徴点それぞれの三次元位置とに基づいて、前記第2撮像装置が前記物体を撮像した場合に生成される前記第2画像データが示す画像における前記複数の特徴点それぞれの二次元位置を特定する二次元位置特定部、及び、
前記画像取得部が取得した前記第2画像データと、前記二次元位置特定部が特定した前記複数の特徴点それぞれの前記二次元位置とを含むデータセットを生成する生成部、
として機能させるプログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023148371A JP7376201B1 (ja) | 2023-09-13 | 2023-09-13 | 情報処理システム、情報処理方法及びプログラム |
| JP2023180165A JP2025041487A (ja) | 2023-09-13 | 2023-10-19 | 情報処理装置、情報処理方法及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023148371A JP7376201B1 (ja) | 2023-09-13 | 2023-09-13 | 情報処理システム、情報処理方法及びプログラム |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023180165A Division JP2025041487A (ja) | 2023-09-13 | 2023-10-19 | 情報処理装置、情報処理方法及びプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP7376201B1 JP7376201B1 (ja) | 2023-11-08 |
| JP2025041211A true JP2025041211A (ja) | 2025-03-26 |
Family
ID=88645966
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023148371A Active JP7376201B1 (ja) | 2023-09-13 | 2023-09-13 | 情報処理システム、情報処理方法及びプログラム |
| JP2023180165A Pending JP2025041487A (ja) | 2023-09-13 | 2023-10-19 | 情報処理装置、情報処理方法及びプログラム |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023180165A Pending JP2025041487A (ja) | 2023-09-13 | 2023-10-19 | 情報処理装置、情報処理方法及びプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (2) | JP7376201B1 (ja) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000251074A (ja) * | 1999-03-02 | 2000-09-14 | Fujitsu Ltd | 画像生成処理方法およびその装置 |
| JP2022071822A (ja) * | 2020-10-28 | 2022-05-16 | オリンパス株式会社 | 画像表示方法、表示制御装置、およびプログラム |
| JP2022077805A (ja) * | 2020-11-12 | 2022-05-24 | 独立行政法人日本スポーツ振興センター | 姿勢推定システム、姿勢推定装置、姿勢推定方法、学習装置、及び学習済みモデル |
| JP2022534123A (ja) * | 2020-05-29 | 2022-07-27 | シャンハイ センスタイム インテリジェント テクノロジー カンパニー リミテッド | 画像レジストレーション方法及びそれに関係するモデルトレーニング方法、デバイス、装置 |
| JP2023003597A (ja) * | 2021-06-24 | 2023-01-17 | コニカミノルタ株式会社 | 物体検出装置、プログラムおよび物体検出方法 |
-
2023
- 2023-09-13 JP JP2023148371A patent/JP7376201B1/ja active Active
- 2023-10-19 JP JP2023180165A patent/JP2025041487A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000251074A (ja) * | 1999-03-02 | 2000-09-14 | Fujitsu Ltd | 画像生成処理方法およびその装置 |
| JP2022534123A (ja) * | 2020-05-29 | 2022-07-27 | シャンハイ センスタイム インテリジェント テクノロジー カンパニー リミテッド | 画像レジストレーション方法及びそれに関係するモデルトレーニング方法、デバイス、装置 |
| JP2022071822A (ja) * | 2020-10-28 | 2022-05-16 | オリンパス株式会社 | 画像表示方法、表示制御装置、およびプログラム |
| JP2022077805A (ja) * | 2020-11-12 | 2022-05-24 | 独立行政法人日本スポーツ振興センター | 姿勢推定システム、姿勢推定装置、姿勢推定方法、学習装置、及び学習済みモデル |
| JP2023003597A (ja) * | 2021-06-24 | 2023-01-17 | コニカミノルタ株式会社 | 物体検出装置、プログラムおよび物体検出方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2025041487A (ja) | 2025-03-26 |
| JP7376201B1 (ja) | 2023-11-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102766548B1 (ko) | 3차원의 도로 모델을 생성하는 방법 및 장치 | |
| US20210374978A1 (en) | Capturing environmental scans using anchor objects for registration | |
| JP5093053B2 (ja) | 電子カメラ | |
| JP2020535509A (ja) | イメージ内のターゲットオブジェクトに自動的にアノテーションするための方法、装置およびシステム | |
| CN110022470A (zh) | 使用合成图像训练对象检测算法的方法和系统和存储介质 | |
| KR102234461B1 (ko) | 2d 지도를 이용하여 거리뷰 이미지의 깊이 정보를 생성하는 방법 및 시스템 | |
| EP3330928A1 (en) | Image generation device, image generation system, and image generation method | |
| CN110520899A (zh) | 标识在环境中的标记的位置 | |
| CN109690622A (zh) | 多相机系统中的相机登记 | |
| CN112258574A (zh) | 标注位姿信息的方法、装置及计算机可读存储介质 | |
| WO2019099408A1 (en) | System and methods for extrinsic calibration of cameras and diffractive optical elements | |
| JP2011239361A (ja) | 繰り返し撮影用arナビゲーション及び差異抽出のシステム、方法及びプログラム | |
| KR102436730B1 (ko) | 가상 스크린의 파라미터 추정 방법 및 장치 | |
| JP7657308B2 (ja) | シーンの3次元モデルを生成するための方法、装置、およびシステム | |
| JP2022131778A5 (ja) | ||
| US20230326098A1 (en) | Generating a digital twin representation of an environment or object | |
| JP2015125641A (ja) | 情報処理装置、その制御方法、及びプログラム | |
| JPWO2019193859A1 (ja) | カメラ較正方法、カメラ較正装置、カメラ較正システムおよびカメラ較正プログラム | |
| CN115100257A (zh) | 套管对准方法、装置、计算机设备、存储介质 | |
| JP5198078B2 (ja) | 計測装置および計測方法 | |
| US20230108922A1 (en) | Using camera feed to improve quality of reconstructed images | |
| WO2020067204A1 (ja) | 学習用データ作成方法、機械学習モデルの生成方法、学習用データ作成装置及びプログラム | |
| JP2025041487A (ja) | 情報処理装置、情報処理方法及びプログラム | |
| CN113008135B (zh) | 用于确定空间中目标点位置的方法、设备、电子装置及介质 | |
| KR102814414B1 (ko) | 3차원 데이터의 획득 가이드를 제공하는 방법 및 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230913 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20230913 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20231003 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20231006 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20231017 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20231019 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7376201 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |