JP2024067006A - 2d/3d画像整合方法及びこれを行う手術用ロボットシステム - Google Patents
2d/3d画像整合方法及びこれを行う手術用ロボットシステム Download PDFInfo
- Publication number
- JP2024067006A JP2024067006A JP2023186147A JP2023186147A JP2024067006A JP 2024067006 A JP2024067006 A JP 2024067006A JP 2023186147 A JP2023186147 A JP 2023186147A JP 2023186147 A JP2023186147 A JP 2023186147A JP 2024067006 A JP2024067006 A JP 2024067006A
- Authority
- JP
- Japan
- Prior art keywords
- image
- interest
- region
- volume
- determining
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





















Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/30—Determination of transform parameters for the alignment of images, i.e. image registration
- G06T7/33—Determination of transform parameters for the alignment of images, i.e. image registration using feature-based methods
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/30—Determination of transform parameters for the alignment of images, i.e. image registration
- G06T7/33—Determination of transform parameters for the alignment of images, i.e. image registration using feature-based methods
- G06T7/337—Determination of transform parameters for the alignment of images, i.e. image registration using feature-based methods involving reference images or patches
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/25—User interfaces for surgical systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1602—Programme controls characterised by the control system, structure, architecture
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1694—Programme controls characterised by use of sensors other than normal servo-feedback from position, speed or acceleration sensors, perception control, multi-sensor controlled systems, sensor fusion
- B25J9/1697—Vision controlled systems
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N20/00—Machine learning
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T17/00—Three dimensional [3D] modelling, e.g. data description of 3D objects
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/0002—Inspection of images, e.g. flaw detection
- G06T7/0012—Biomedical image inspection
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/11—Region-based segmentation
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/20—Image preprocessing
- G06V10/25—Determination of region of interest [ROI] or a volume of interest [VOI]
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/82—Arrangements for image or video recognition or understanding using pattern recognition or machine learning using neural networks
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
- A61B2034/101—Computer-aided simulation of surgical operations
- A61B2034/105—Modelling of the patient, e.g. for ligaments or bones
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
- A61B2034/107—Visualisation of planned trajectories or target regions
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2055—Optical tracking systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2065—Tracking using image or pattern recognition
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B2090/364—Correlation of different images or relation of image positions in respect to the body
- A61B2090/367—Correlation of different images or relation of image positions in respect to the body creating a 3D dataset from 2D images using position information
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3983—Reference marker arrangements for use with image guided surgery
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10072—Tomographic images
- G06T2207/10076—4D tomography; Time-sequential 3D tomography
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10072—Tomographic images
- G06T2207/10081—Computed x-ray tomography [CT]
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10116—X-ray image
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20084—Artificial neural networks [ANN]
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30004—Biomedical image processing
- G06T2207/30008—Bone
- G06T2207/30012—Spine; Backbone
Landscapes
- Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Physics & Mathematics (AREA)
- Surgery (AREA)
- Medical Informatics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- General Health & Medical Sciences (AREA)
- Robotics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Public Health (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- Veterinary Medicine (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Software Systems (AREA)
- Evolutionary Computation (AREA)
- Multimedia (AREA)
- Artificial Intelligence (AREA)
- Computing Systems (AREA)
- Mechanical Engineering (AREA)
- Radiology & Medical Imaging (AREA)
- Quality & Reliability (AREA)
- Geometry (AREA)
- Data Mining & Analysis (AREA)
- General Engineering & Computer Science (AREA)
- Mathematical Physics (AREA)
- Human Computer Interaction (AREA)
- Computer Graphics (AREA)
- Automation & Control Theory (AREA)
- Apparatus For Radiation Diagnosis (AREA)
- Databases & Information Systems (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Pathology (AREA)
- Image Analysis (AREA)
- Neurology (AREA)
- Oral & Maxillofacial Surgery (AREA)
Abstract

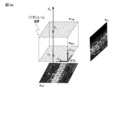
【解決手段】本発明の画像整合方法は、手術前の3D画像からAP方向及びLL方向のDRR画像を抽出し、手術中の2D画像装置から前記患者の手術部位のAP画像とLL画像の2D画像を得、AP画像またはLL画像の第1基準位置に対応する患者の手術部位の参照位置と第1基準位置との間の第1回転角度を決め、2D画像に対するソース及びディテクタの幾何空間関係から、参照位置に対応するAP画像またはLL画像の第2基準位置と参照位置との間の第2回転角度を決め、2D画像及びDRR画像との間の変換関係を決めるステップと、を含むことを特徴とする。
【選択図】図2
Description


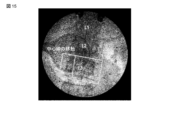
C1及びC2はLL画像上の関心領域の左右の辺の中点である。






11:メモリ
13:プロセッサ
15:ディスプレイ
17:ユーザインターフェース
19:通信インターフェース
Claims (20)
- 各ステップがプロセッサを含む画像整合装置によって実行される画像整合方法において、
手術前の3D画像装置から患者の手術部位の3D画像を得るステップと、
前記3D画像からAP方向及びLL方向のDRR画像を抽出するステップと、
手術中の2D画像装置から前記患者の手術部位のAP画像とLL画像の2D画像を得るステップと、
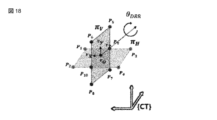
前記DRR画像に対するソース及びディテクタの幾何空間関係から、前記AP画像及び前記LL画像の平面に対する第1法線ベクトルの外積ベクトルと平行であり、あらかじめ決められた第1原点を過ぎる第1回転軸を基準として、あらかじめ決められた前記AP画像または前記LL画像の第1基準位置に対応する前記患者の手術部位の参照位置と前記第1基準位置との間の第1回転角度を決めるステップと、
前記2D画像に対するソース及びディテクタの幾何空間関係から、前記AP画像及び前記LL画像の平面に対する第2法線ベクトルの外積ベクトルと平行であり、あらかじめ決められた前記第2原点を過ぎる第2回転軸を基準として、前記参照位置に対応する前記AP画像または前記LL画像の第2基準位置と前記参照位置との間の第2回転角度を決めるステップと、
前記DRR画像及び前記2D画像のそれぞれの前記ソース及びディテクタに対する幾何空間関係から、前記第1回転角度及び第2回転角度を基にして前記2D画像及び前記DRR画像との間の変換関係を決めるステップと、含むことを特徴とする画像整合方法。 - 前記第1基準位置及び前記第2基準位置は、前記2D画像及び前記DRR画像のそれぞれに対する前記AP画像または前記LL画像の中心または前記中心を含む線または面であることを特徴とする請求項1に記載の画像整合方法。
- 前記画像整合装置は、前記3D画像を基にして手術プランニングを行うステップをさらに含み、
前記DRR画像に対する前記第1原点は、手術プランニングに適用されたインプラントの取り付け位置または前記インプラントの取り付けのための手術具の軌道の相対関係を介して決められることを特徴とする請求項1に記載の画像整合方法。 - 前記DRR画像または前記2D画像に対する前記参照位置は、ユーザの入力によって決められることを特徴とする請求項1に記載の画像整合方法。
- 前記DRR画像に対する前記ソース及び前記ディテクタの幾何空間関係は、正投影(orthogonal projection)関係であり、
前記2D画像に対する前記ソース及び前記ディテクタの幾何空間関係は、遠近投影(perspective projection)関係であることを特徴とする請求項1に記載の画像整合方法。 - 前記画像整合装置が、前記DRR画像に対する前記ソース及び前記ディテクタの前記幾何空間関係から、前記第1法線ベクトルの方向に前記AP画像平面及び前記LL画像平面を移動するのに伴って平面が交差する第1関心ボリュームを決めるステップと、
前記画像整合装置が、前記2D画像に対する前記ソース及び前記ディテクタの前記幾何空間関係は遠近投影関係であり、遠近投影範囲内で前記第2法線ベクトルの方向に前記AP画像平面及び前記LL画像平面を移動するのに伴って平面が交差する第2関心ボリュームを決めるステップと、をさらに含むことを特徴とする請求項1に記載の画像整合方法。 - 前記第1原点は前記第1関心ボリュームの中心点であり、前記第2原点は前記第2関心ボリュームの中心点であることを特徴とする請求項6に記載の画像整合方法。
- 前記画像整合装置が、前記DRR画像のAP画像及び前記LL画像のそれぞれに対する第1関心領域を決めるステップと、
前記画像整合装置が、前記第1関心領域に対応する第2関心領域を、前記2D画像の前記AP画像及び前記LL画像のそれぞれに対して決めるステップと、をさらに含み、
前記第1基準位置は前記第1関心領域の内に位置し、
前記第2基準位置は前記第2関心領域の内に位置することを特徴とする請求項1に記載の画像整合方法。 - 前記画像整合装置が、前記DRR画像に対する前記ソース及び前記ディテクタの前記幾何空間関係から、前記第1法線ベクトルの方向に前記AP画像の関心領域及び前記LL画像の関心領域を移動するのに伴って平面が交差する第1関心ボリュームを決めるステップと、
前記画像整合装置が前記2D画像に対する前記ソース及び前記ディテクタの前記幾何空間関係は遠近投影関係であり、遠近投影範囲内で前記第2法線ベクトルの方向に前記AP画像の関心領域及び前記LL画像の関心領域を移動するのに伴って平面が交差する第2関心ボリュームを決めるステップと、をさらに含むことを特徴とする請求項8に記載の画像整合方法。 - 前記第1原点は前記第1関心ボリュームの中心点であり、前記第2原点は前記第2関心ボリュームの中心点であることを特徴とする請求項9に記載の画像整合方法。
- 前記第1原点は、患者の脊椎ペディクルスクリューのターゲット位置間の中点であることを特徴とする請求項9に記載の画像整合方法。
- 前記第1回転角度は前記第1原点を中心として、前記ペディクルスクリュー進入点(entry point)間の中点と前記第1原点とを結ぶ線分と、
前記第1関心ボリュームの中心点を過ぎる前記第1法線ベクトルがなす角度であることを特徴とする請求項11に記載の画像整合方法。 - 前記DRR画像の前記AP画像及び前記LL画像に対する前記第1関心領域のそれぞれは長方形であり、
前記DRR画像について、
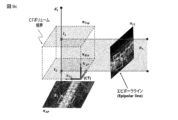
前記画像整合装置が、前記AP画像の関心領域の各頂点に対する前記LL画像上のエピポーラライン(epipolar line)と、前記LL画像の関心領域の外周辺または側辺の中点との間を結ぶ中線との第1交差点を算出する第1ステップと、
前記画像整合装置が、前記第1交差点を前記AP画像の関心領域の各頂点からの前記法線ベクトルにそれぞれ正射影して4つの復元点を得る第2ステップと、
前記画像整合装置が、前記LL画像の関心領域の各頂点に対する前記AP画像上のエピポーララインとの前記AP画像の関心領域の外周辺または側辺の中点との間を結ぶ中線との第2交差点を求める第3ステップと、
前記画像整合装置が、前記第2交差点を前記LL画像上の関心領域の各頂点からの前記法線ベクトルにそれぞれ正射影して4つの復元点を得る第4ステップと、
前記画像整合装置が、前記第1乃至第4ステップを介して得られた8つの復元点を基にして形成される六面体の第1関心ボリュームを算出する第5ステップと、を含むことを特徴とする請求項8に記載の画像整合方法。 - 前記第2関心ボリュームを決めるステップは、前記2D画像に対して、
前記画像整合装置が、前記AP画像の関心領域の各頂点に対する前記LL画像上のエピポーラライン(epipolar line)と、前記LL画像の関心領域の外周辺または側辺の中点との間を結ぶ中線との第1交差点を算出する第1ステップと、
前記画像整合装置が、前記第1交差点を前記AP画像の関心領域の各頂点から前記ソースへ向かう遠近投影ベクトルに遠近投影して4つの復元点を得る第2ステップと、
前記画像整合装置が、前記LL画像の関心領域の各頂点に対する前記AP画像上のエピポーララインと、前記AP画像の関心領域の外周辺または側辺の中点との間を結ぶ中線との第2交差点を求める第3ステップと、
前記画像整合装置が、前記第2交差点を前記LL画像上の関心領域の各頂点からソースへ向かう遠近投影ベクトルにそれぞれ遠近投影して4つの復元点を得る第4ステップと、
前記画像整合装置が、前記第1乃至第4ステップで得られた8つの復元点を基にして六面体の第2関心ボリュームを決める第5ステップと、を含むことを特徴とする請求項8に記載の画像整合方法。 - 各ステップがプロセッサを含む画像整合装置によって実行される画像整合方法において、
手術前の3D画像装置から患者の手術部位の3D画像を得るステップと、
前記3D画像からAP方向及びLL方向のDRR画像を抽出するステップと、
手術中の2D画像装置から前記患者の手術部位のAP画像とLL画像の2D画像を得るステップと、
前記DRR画像の前記AP画像及び前記LL画像のそれぞれに対する第1関心領域を決めるステップと、
前記第1関心領域に対応する第2関心領域を、前記2D画像の前記AP画像及び前記LL画像のそれぞれに対して決めるステップと、
前記DRR画像に対するソース及びディテクタの幾何空間関係から、前記AP画像及び前記LL画像の平面に対する第1法線ベクトルの方向に、前記AP画像の関心領域及び前記LL画像の関心領域を平行移動するときに平面が交差して形成される第1関心ボリュームを決めるステップと、
前記2D画像に対するソース及びディテクタの幾何空間関係は、遠近投影関係であり、前記遠近投影範囲内で前記2D画像のAP画像及びLL画像に対する第2法線ベクトルの方向に前記AP画像の関心領域及び前記LL画像の関心領域を移動するときに平面が交差して形成される第2関心ボリュームを決めるステップと、
前記第1関心領域内のあらかじめ決められた第1基準位置に対応する前記第1関心ボリューム内の第1基準位置と前記第1基準位置に対応するあらかじめ決められた参照位置の第1変位を決めるステップと、
前記参照位置に対応する前記第2関心領域内のあらかじめ決められた第2基準位置に対する前記第2関心ボリューム内の第2基準位置と前記参照位置との間の第2変位を決めるステップと、
前記第1変位と前記第2変位に基にして、前記DRR画像及び前記2D画像それぞれの前記ソース及びディテクタに対する幾何空間関係から前記2D画像及び前記DRR画像との間の変換関係を決めるステップであって、前記変換関係に従って、前記第1関心領域の頂点と前記第2関心領域の頂点との間のユークリディアン距離が最小となるようにする変換関係を決めるステップと、を含むことを特徴とする画像整合方法。 - 前記第1変位を決めるステップは、前記AP画像及び前記LL画像の平面に対する前記第1法線ベクトルの外積ベクトルと平行であり、あらかじめ決められた第1原点を過ぎる第1回転軸を基準として、前記参照位置と前記第1基準位置との間の角度を第1回転角度であると決めるステップと、
前記第2変位を決めるステップは、前記AP画像及び前記LL画像の平面に対する前記第2法線ベクトルの外積ベクトルと平行であり、あらかじめ決められた第2原点を過ぎる第2回転軸を基準として、前記参照位置と第2基準位置との間の角度を第2回転角度であると決めるステップと、を含むことを特徴とする請求項15に記載の画像整合方法。 - 前記第1及び第2関心ボリュームを決めるステップは、前記第1及び第2関心領域の頂点のエピポーララインを前記第1及び第2法線ベクトルに投影して多面体を形成するステップをそれぞれ含むことを特徴とする請求項15に記載の画像整合方法。
- 画像整合装置において、
請求項1乃至請求項17の中のいずれか一項に記載の画像整合方法を実行するためのプロセッサを含む画像整合装置。 - 手術用ロボットシステムにおいて、
手術中の患者の手術部位の2D画像を得るための2D画像装置と、
手術具が着脱可能なエンドエフェクタを含むロボットアームと、
前記手術具または前記エンドエフェクタのリアルタイム位置をセンシングするための位置センサと、
あらかじめ決められた手術プランニングに応じて前記ロボットアームを制御するコントローラと、
ディスプレイと、
請求項1乃至請求項17の中のいずれか一項の画像整合方法を行って、前記ディスプレイを介して手術具またはインプラントに対する前記プランニング情報を手術中に得られる2D画像に表示したり、前記手術具またはインプラントの前記リアルタイム位置を前記2D画像または手術前に得られる3D画像に表示するナビゲーションシステムを含むことを特徴とする手術用ロボットシステム。 - 請求項1乃至請求項17の中のいずれか一項に記載の画像整合方法を行うためのソフトウェアを格納するコンピュータプログラム媒体。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR10-2022-0144585 | 2022-11-02 | ||
| KR1020220144585A KR102612603B1 (ko) | 2022-11-02 | 2022-11-02 | 2d-3d 이미지 정합 방법 및 이를 수행하는 수술용 로봇 시스템 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2024067006A true JP2024067006A (ja) | 2024-05-16 |
| JP7577378B2 JP7577378B2 (ja) | 2024-11-05 |
Family
ID=88647306
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023186147A Active JP7577378B2 (ja) | 2022-11-02 | 2023-10-31 | 2d/3d画像整合方法及びこれを行う手術用ロボットシステム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20240144498A1 (ja) |
| EP (2) | EP4404140A3 (ja) |
| JP (1) | JP7577378B2 (ja) |
| KR (1) | KR102612603B1 (ja) |
| CN (1) | CN117994300A (ja) |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20170030687A (ko) * | 2015-09-09 | 2017-03-20 | 울산대학교 산학협력단 | 의료영상을 사용하는 중재시술 가이드 방법 및 이를 위한 중재시술 시스템 |
| JP2018079304A (ja) * | 2016-10-10 | 2018-05-24 | グローバス メディカル インコーポレイティッド | 2d−3d位置合わせの収束を改善するための方法及びシステム |
| JP2019514547A (ja) * | 2016-04-28 | 2019-06-06 | メドトロニック・ナビゲーション,インコーポレーテッド | 画像に基づいたナビゲーションの方法および装置 |
| KR20210123912A (ko) * | 2020-04-06 | 2021-10-14 | 큐렉소 주식회사 | 2차원 의료영상 기반 척추 수술 플래닝 장치 및 방법 |
| JP2022523587A (ja) * | 2019-03-13 | 2022-04-25 | キュレクソ インコーポレイテッド | C-armベースの医用画像システム及び2D画像と3D空間の整合方法 |
| JP2022524607A (ja) * | 2019-03-13 | 2022-05-09 | キュレクソ インコーポレイテッド | 椎弓根スクリューの固定プランニングシステム及び方法 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7204640B2 (en) * | 2003-08-29 | 2007-04-17 | Accuray, Inc. | Apparatus and method for registering 2D radiographic images with images reconstructed from 3D scan data |
| US10621738B2 (en) * | 2011-03-16 | 2020-04-14 | Siemens Healthcare Gmbh | 2D/3D registration for abdominal aortic aneurysm intervention |
| US9861446B2 (en) * | 2016-03-12 | 2018-01-09 | Philipp K. Lang | Devices and methods for surgery |
| WO2019010203A1 (en) * | 2017-07-03 | 2019-01-10 | Spine Align, Llc | SYSTEM AND METHOD FOR PEROPERATIVE ALIGNMENT ASSESSMENT |
| WO2019051464A1 (en) * | 2017-09-11 | 2019-03-14 | Lang Philipp K | INCREASED REALITY DISPLAY FOR VASCULAR AND OTHER INTERVENTIONS, COMPENSATION FOR CARDIAC AND RESPIRATORY MOVEMENT |
| CN111670007A (zh) * | 2018-01-31 | 2020-09-15 | 西门子医疗有限公司 | 医学成像设备的拍摄系统的位置规划方法和医学成像设备 |
| WO2020114511A1 (en) * | 2018-12-07 | 2020-06-11 | Shanghai United Imaging Healthcare Co., Ltd. | Systems and methods for subject positioning and image-guided surgery |
| CA3124683A1 (en) * | 2020-07-10 | 2022-01-10 | Spine Align, Llc | Intraoperative alignment assessment system and method |
| EP4201331B1 (en) * | 2020-09-11 | 2025-06-11 | Shanghai United Imaging Healthcare Co., Ltd. | Dynamic perspective method, apparatus and system for c-shaped arm equipment |
| EP4229595A1 (en) * | 2020-10-14 | 2023-08-23 | Vuze Medical Ltd. | Apparatus and methods for use with image-guided skeletal procedures |
-
2022
- 2022-11-02 KR KR1020220144585A patent/KR102612603B1/ko active Active
-
2023
- 2023-10-31 US US18/498,505 patent/US20240144498A1/en active Pending
- 2023-10-31 EP EP23207139.9A patent/EP4404140A3/en active Pending
- 2023-10-31 EP EP25185513.6A patent/EP4609815A3/en active Pending
- 2023-10-31 JP JP2023186147A patent/JP7577378B2/ja active Active
- 2023-11-01 CN CN202311447959.5A patent/CN117994300A/zh active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20170030687A (ko) * | 2015-09-09 | 2017-03-20 | 울산대학교 산학협력단 | 의료영상을 사용하는 중재시술 가이드 방법 및 이를 위한 중재시술 시스템 |
| JP2019514547A (ja) * | 2016-04-28 | 2019-06-06 | メドトロニック・ナビゲーション,インコーポレーテッド | 画像に基づいたナビゲーションの方法および装置 |
| JP2018079304A (ja) * | 2016-10-10 | 2018-05-24 | グローバス メディカル インコーポレイティッド | 2d−3d位置合わせの収束を改善するための方法及びシステム |
| JP2022523587A (ja) * | 2019-03-13 | 2022-04-25 | キュレクソ インコーポレイテッド | C-armベースの医用画像システム及び2D画像と3D空間の整合方法 |
| JP2022524607A (ja) * | 2019-03-13 | 2022-05-09 | キュレクソ インコーポレイテッド | 椎弓根スクリューの固定プランニングシステム及び方法 |
| KR20210123912A (ko) * | 2020-04-06 | 2021-10-14 | 큐렉소 주식회사 | 2차원 의료영상 기반 척추 수술 플래닝 장치 및 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN117994300A (zh) | 2024-05-07 |
| US20240144498A1 (en) | 2024-05-02 |
| KR102612603B1 (ko) | 2023-12-12 |
| EP4404140A2 (en) | 2024-07-24 |
| EP4404140A3 (en) | 2025-01-01 |
| JP7577378B2 (ja) | 2024-11-05 |
| EP4609815A3 (en) | 2025-11-12 |
| EP4609815A2 (en) | 2025-09-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11657518B2 (en) | Method for deformable 3D-2D registration using multiple locally rigid registrations | |
| US11989833B2 (en) | Method and system of model fusion for laparoscopic surgical guidance | |
| Mellor | Enhanced reality visualization in a surgical environment | |
| US9622824B2 (en) | Method for automatically identifying instruments during medical navigation | |
| Buschbaum et al. | Computer-assisted fracture reduction: a new approach for repositioning femoral fractures and planning reduction paths | |
| US20150125033A1 (en) | Bone fragment tracking | |
| WO2007105545A1 (ja) | 医用画像の表示方法およびそのプログラム | |
| US8165366B2 (en) | Determining correspondence object pairs for medical navigation | |
| US10078906B2 (en) | Device and method for image registration, and non-transitory recording medium | |
| Wen et al. | In situ spatial AR surgical planning using projector-Kinect system | |
| Schoob et al. | Soft tissue motion tracking with application to tablet-based incision planning in laser surgery | |
| JP7577378B2 (ja) | 2d/3d画像整合方法及びこれを行う手術用ロボットシステム | |
| JP7037810B2 (ja) | 画像処理装置と画像処理プログラムと画像処理方法 | |
| Liebmann et al. | Registration made easy--standalone orthopedic navigation with HoloLens | |
| WO2024112857A1 (en) | Extended reality registration method using virtual fiducial markers | |
| JP2025534193A (ja) | 2d映像基盤自動手術計画方法及びそのシステム | |
| US20220015735A1 (en) | Marker registration correction by virtual model manipulation | |
| CN112368739B (zh) | 用于肝脏手术的对准系统 | |
| Hosseinian et al. | C-arm pose estimation and navigation in surgeries for augmented reality application | |
| Irwansyah et al. | Repositioning bone fragments using registration of paired-points and assisted-constraints in virtual bone reduction surgery | |
| JP7709778B2 (ja) | タグガイド画像位置決めの方法及びシステム | |
| CN113349931A (zh) | 一种高精度手术导航系统的病灶配准方法 | |
| WO2025188772A1 (en) | Systems and methods for executing extended reality registration and pose estimation | |
| Chen et al. | Tracking and Calibration | |
| CN120298481A (zh) | 手术导板的位置检测方法、装置和计算机设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20231031 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240528 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240820 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240924 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20241016 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7577378 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |