本開示の態様は、垂直揚力航空機などの航空機のトルク伝達を減らすかまたは排除するシステム、装置および方法に関する。実施形態において、本開示の態様は、航空機の胴体4に対して1つ以上のエンジン5によって生じるトルクの伝達が、例えば、1つ以上の支持ベアリング2によって減らされるかまたは、排除さえされる、方法と装置を含む。いくつかの例において、1つ以上のエンジン5によって生じるトルクの量は、エンジン5、ロータシャフト1およびその関連するコンポーネントを胴体4から分離することから、支持ベアリング2の能力を上回らない。航空機の胴体4に対するトルク伝達の緩和/排除は、テールロータまたは逆回転ブレードなどの逆トルク機構の必要性を減らすかまたは排除する。特に、本明細書において説明されている技術は、エンジン5からの回転推力の喪失が生じた場合、航空機が自動回転する能力を維持する。
航空機のボディは、限定するものではないが、例えば、胴体4、貨物ボックス、カメラおよび監視パッケージ、兵器、航空機上部構造ならびに航空および制御装置などの、1つ以上の移動可能なユニットを含むことができるかまたはそれに連結することができる。一実施形態において、本開示の技術は、推力を支持構造物7に提供することができるエンジン5を使用する。推力支持構造物7は、ロータブレード3と同一平面ではなく、ロータシャフト1のいずれの側にも同軸でありかつそこに伸びている。エンジン5によって印加される推力に応じて、推力支持構造物7は、ロータシャフト1の軸のまわりを回転する。このような回転は、クラッチ6(支持構造物7を押すために接続されている)をロータシャフト1に係合させて、ロータシャフト1を回転させる。ロータシャフト1の回転が、次にロータハブ11および取り付けられたロータブレード3を回転させる。
推力支持構造物7がエンジン5から推力を受けていないとき、クラッチ6はロータシャフト1から推力支持構造物7を分離する。その状態において、ロータシャフト1、ロータハブ11およびロータブレード3は、自由に回転することができる。実施形態において、ロータシャフト1は、常にロータシャフト1(および、付属のロータブレード3)が胴体4に関して自由に回転することができる1つまたは複数の支持ベアリング2だけによって、胴体4に接続される。いくつかの実施形態では、本明細書において説明されている技術は、空気流(例えば、エンジン5によって生成される)を推力支持構造物7の外側の先端へ供給するように構成される管/ダクトを含む。このような管/ダクトは、例えば、推力支持構造物7の内側または外側の1つ以上のチャネルまたは空洞を介して、推力支持構造物7の外側または内部に含まれるか、連結されるか、あるいは空気流を供給することができる。実施形態において、管/ダクトの端部は、推力支持構造物7の先端からの出口に配置される。したがって、管/ダクトを通る空気流によって、ロータシャフト1の軸周辺で、推力支持構造物7の回転が生じ得る。推力支持構造物7の回転は次にクラッチ6をロータシャフト1に係合させ、したがってロータハブ11および付属のロータブレード3の回転を引き起こす。前述のように、エンジン5が推力を推力支持構造物7へ供給していないときは、クラッチ6はロータシャフト1から推力支持構造物7を分離して、ロータシャフト1および付属のロータブレード3が自由に自動回転するのを可能にする。
支持ベアリング2は、エンジン5によって生じるトルクおよび/または上述機械要素の回転を胴体4から分離するように一般に機能する。実施形態において、エンジン5および/または上述のコンポーネントの回転によって生じるトルクは、このようなトルクを胴体4から分離する支持ベアリング2の能力を上回らない。このような分離のため、逆トルク装置は必要とされず、航空機設計から排除することができる。より具体的には、本明細書において説明されている技術は、テールロータまたは逆回転翼などの逆トルク装置の必要性、およびすべてのそれらの関連コスト、電力消費、重量、保守および安全問題を排除することができる。
本発明のさらに別の実施形態では、本明細書において説明されている技術は、推力支持構造物7に対して様々な位置に置かれるエンジン5を利用する。さらに、推力支持構造物7は、航空機の他のコンポーネントに対して、様々な位置に配置することができる。例えば、推力支持構造物7は、ロータブレード3と同軸でかつロータシャフト1に対して垂直であってもよく、そしてロータブレード3の上に、下に、または、上下に配置されてもよい。2つ以上の支持構造物7が存在し得て、すべてが同一平面上にあるか、あるいはロータシャフト1と同軸である異なる平面上にあるかのいずれかであることに留意する必要がある。例えば、実施形態において、第1推力支持構造物7はロータブレード3と同軸でかつその上に配置することができ、第2推力支持構造物7はロータブレード3と同軸でかつその下に配置することができ、第1および第2推力支持構造物7はそれぞれ1つ以上のエンジン5に連結されている。
本開示の技術は、特に逆トルク回転ソリューションと比較すると、多数の利点を提供することができる。このような利点には、限定されるものではないが、以下のものが含まれる。(1)テールロータおよび逆回転翼のような反トルク機構の排除、(2)方位制御は、方位制御装置12または、方位制御装置12が回転力を方向制御および安定化のために胴体に課すような同じ機能を実行する類似の装置によって提供でき、または、方位制御はテールラダー8によって提供でき、または、方位制御はテールラダー8および方位制御装置12の組合せによって提供できるので、航空機は全くテールを有する必要がない、(3)テールロータおよびその拡張テールブームがもはや必要ないので、ブーム打撃のリスクは排除することができる、(4)電力容量などのための送達可能なペイロードは、テールロータ、ブーム、ギアボックスおよび関連した構造的コンポーネントの重量および抗力が排除されるため増加させることができる、(5)テールロータが要求されないので、テールロータ騒音が排除される、(6)テールロータが排除されるため、周期的トリムによってテールロータ推力を相殺する必要なしに航空機が離陸、着陸およびホバリングすることができるので、ディスク傾斜は排除される、(7)テールロータまたはロータブレードの第2のセットを駆動する必要性の排除に起因して、および/または推力支持構造物7およびその付属物の追加的な慣性に起因して、自動回転性能は改善することができる、(8)製造および保守コストを低減することができる、(9)回転テールロータと関連した危険性は排除することができる、(10)テールロータならびにその構造および動作コンポーネントにとっての損失、故障または損傷による制御の喪失と関連した危険は、低減することができるかまたは排除することさえできる、(11)離陸、着陸および駐機設置面積は低減することができる、(12)現在利用できる地上設備、すでに訓練されているパイロットおよびパイロット訓練手順、連邦、州および地域管理規則、増加した胴体容量および増加した安全性の追加的利点を備えた既存の製造およびテスト技術を利用する能力、(13)より小さいドローンから大型の一般用および軍用航空機までの様々な航空機サイズ用としての技術の容易な適合性、(14)多種多様なエンジンを利用する能力、(15)本発明の強化された自動回転能力は、他によって提案されている多数の複数ロータデザインを上回る膨大な安全上の利点を提供する、 (16)エンジン5の推力線による渦の環状態緩和はローターブレード3の上に水平に扇形に広がる高速度空気流を作り出し、結果としてローターブレード3の上に低圧領域が形成されてさらに揚力を改善する、などである。 このような利点は例のために列挙されており、他の利点は当業者にとって明らかである。
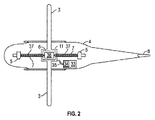
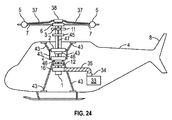
図1は、本開示の一実施形態の代表的な側面図であり、本発明の航空機が、テールロータまたは逆回転ロータブレードなどの逆トルク装置なしで作動することを可能にするコンポーネントを示す。図2は、同じ実施形態の上面図である。示すように、図1では、ロータシャフト1およびすべてのその付属物は、支持ベアリング2、ベアリング支持体46およびベアリング支持構造43から成るアセンブリによって支持されている。結果として得られるアセンブリは、ロータシャフト1およびその付属物の胴体との唯一の接点がベアリング支持構造43および支持ベアリング2であるように、胴体4に取り付けられる。ロータシャフト1およびその付属物によって発揮されるトルクは、胴体4を前記トルクから分離する支持ベアリング2の能力を上回らない。トルクが胴体へ伝達されないので、従来のヘリコプタにおいて用いられる逆トルク装置の要件は排除することができる。
回転推力支持構造物
図1、2および15に例示するように、エンジン5によって生じたトルクは、推力支持構造物7の回転によって、ロータシャフト1に送達される。推力支持構造物7は、その外端に配置されるエンジン5をサポートする構造部材である。例示の実施形態において、推力支持構造物7は、ロータシャフト1に対して同軸でかつ垂直であり、ロータブレード3とは異なる平面に(例えば、ロータブレード3の上に)位置する。しかしながら、推力支持構造物7およびロータブレード3は、後述するように共通平面にあってもよい。いずれにせよ、エンジン5が使用可能であるときに、推力支持構造物7はロータシャフト1のまわりを回転する。
クラッチ
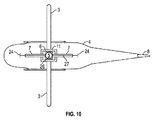
図15は、推力支持構造物7がロータブレード3の上にある図1の実施形態のための本開示のコンポーネントの部分断面図である。示すように、その外端にエンジン5が接続された推力支持構造物7は、ロータシャフト1と同軸であり、ロータブレード3の上に配置されている。推力支持構造物7は、係合状態および分離状態を有するクラッチ6に接続されている。エンジン5が使用可能であるときに、それらによって推力支持構造物7の回転が生じ、そして、回転トルクを引き起こす。このようなトルクにより、取付けられたクラッチ6が係合状態になってロータシャフト1をきつく締め付け、そしてロータシャフト1が回転させられて、それにより次にロータハブ11および付属のロータブレード3が回転することになる。クラッチ6は、一方向ベアリングまたは同じ機能を実行するいかなる好適な装置でもあることができる。様々な方法でこの機能を実行する多数の装置が、当業者には公知である。
使用することができる1つのタイプのクラッチが、図17、18、19および20においてさらに詳細に例示される。図17および19は、係合状態でロータシャフト1を確実に把持しているクラッチ6を例示する。図18および20は、エンジン5が使用可能でない分離状態であって推力支持構造物7の回転速度がロータシャフト1の回転速度未満である、クラッチ6を例示する。それにより、クラッチ6およびその付属の推力支持構造物7は自動的にロータシャフト1から分離し、ロータシャフト1が自由に回転することができるようになり、それはロータシャフト1に取り付けられたロータブレード3が自動回転するのを可能にする。
クラッチ6の1つの例の動作を、ここで図17、18、19および20に関連して説明する。図19は、係合位置にあるクラッチ6の概略図である。クラッチ外側ケース58の回転移動によって、クラッチ可動ベアリング52が傾斜に沿ってクラッチベアリング空洞64内の示される位置へ動かされる。クラッチ可動ベアリング52がこの位置にあるときに、クラッチ外側ケース58がクラッチ外側ケース58およびクラッチ内側レース114の両方に接触させられる。その位置において、クラッチ可動ベアリング52は、クラッチ内側レース114(ロータシャフト1に直接接続される)を確実に把持して、ロータシャフト1をクラッチ外側ケース58と同じ方向に回転させる。図17は、係合位置にある図19に示されるクラッチ6のタイプの断面概略側面図である。推力ベアリングアセンブリ57は、ロータシャフト1上のその位置に適切にクラッチ6を保持するファスナ54によってロータシャフト1に取り付けられると共に、クラッチ6がロータシャフト1を係合するかまたはロータシャフト1を分離することを可能にする。図17に示すように、クラッチ可動ベアリング52は、ロータシャフト1に対してしっかりと係合することができ、したがってクラッチ6およびロータシャフト1を同時に一緒に回転させることができる。
ここで図20を参照すると、これは分離位置にあるクラッチ6の概略図である。クラッチ外側ケース58の回転運動量が存在しないか、または減少していると、クラッチ外側ケース58はロータシャフト1に対するその関係において減速し始める。クラッチ可動ベアリング52は、それらの運動量および遠心力のため、クラッチ内側レース114(繰り返すが、ロータシャフト1に取り付けられている)から遠ざかりそれの把持を緩め、したがってロータシャフト1をクラッチ外側ケース58から切り離して、ロータシャフト1がクラッチ6に関して自由に回転することを可能にする。また、ロータシャフト1の速度がクラッチ6の回転速度より大きいときに、クラッチ6はロータシャフト1から分離される。クラッチ6の分離状態によって、ロータシャフト1が自由に回転することができ、推力支持構造物7および動力システムからのいかなる誘導抗力もなく自動回転することができる。また、自動回転の間、ロータシャフト1の速度がクラッチ6の回転速度以下であるいかなる時も、動力システムの保存された慣性は、ロータシャフト1へ伝達される。この状態が存在している間、この動力システム慣性伝達は、航空機の自動回転のために必要とされる安全な角度まで総体的な傾斜を下げるためにより多くの時間を提供する。
図38はクラッチ6の別の実施形態を示し、それはこの場合ロータハブ11に直結されている。この構成によって、ロータブレード3がロータシャフト1および他の全ての駆動システムコンポーネントから独立して回転することができる。エンジン5は、直結されている推力支持構造物7に組み込まれて、ロータシャフト1を駆動する。ロータシャフト上のその位置に関するこの構成は、ロータブレード3と同一平面の上に、下に、および/または中に位置する推力支持構造物7によって適用することができる。
燃料、電力、データ送達システム
図1および2は、下部燃料ライン35に接続している燃料タンク33および燃料ポンプ34を示す。図1および15は、下部回転ユニオン16に接続されている燃料ラインシャフト48に接続している下部燃料ライン35を示す。下部回転ユニオン16は、図35にさらに詳細に示されている。実施形態において、下部回転ユニオン16および上部回転ユニオン38は、異なる配向を有する同じ装置でもよい。図35および図15に示すように、下部回転ユニオン16は、下部燃料ライン35から来ている燃料入力、データ配線68から来ているデータ入力および電源配線69から来ている電源入力を有する。図15は、データ配線68が下部回転ユニオン16から上へロータシャフト1を通して上部回転ユニオン38に伸びるデータ導管66を示す。図35は、燃料、データおよび電力がどのように下部回転ユニオン16および上部回転ユニオン38を通して伝達されるかについて示す。図15の実施形態において、上部回転ユニオン38を出た後に、データ配線68は、適切な防護遮へい体を通して、推力支持構造物7に沿って、またはそれを通してエンジン5に、または、データを必要としているそのような他の装置に向かう。電源配線69は、別個の電力導管72を通してであることを除けば、データ配線と同様の方法で、ロータシャフト1の最下部からロータシャフト1の最上部まで、エンジン5または他の電力を必要としている装置に向かう。図35はまた、下部回転ユニオン16および上部回転ユニオン38の詳細を、それらが異なる配向を有する同じ装置のものであるので、示している。
燃料は、下部回転ユニオン16を通して、ロータシャフト1と同調して回転するロータシャフト内部燃料ライン47に、ポンプ圧送することができる。図15は、燃料が、上部回転ユニオン38にロータシャフト1の内部を通して上へ伸びているロータシャフト内部燃料ライン47を通してどのようにポンプ圧送されることができるかについて示している。図35の実施形態において、回転ユニオンシール49は、下部回転ユニオン16および上部回転ユニオン38がロータシャフト1によって回転する際に、燃料漏れを防止する。回転ユニオンベアリング50によって、ロータシャフト1に取り付けられている下部回転ユニオン16および上部回転ユニオン38は、ロータシャフト1の下端および上端で燃料ラインシャフト48に関して自由に回転することができる。それから、燃料は、ロータシャフト1の上端の燃料ラインシャフト48から上部燃料ライン37を通して、エンジン5まで送達される。図15において、上部燃料ライン37は、推力支持構造物7に固定されているか、またはその内側に収容されている。ヘリコプタ航空機用の燃料輸送および送達のこれらの方法は、米国特許第2,761,635号(Hiller)に開示される手段と類似の機能を実行する。電力、空気圧およびデータなどの他の要素もまた、類似の回転ユニオンまたはスリップリングタイプの装置によって、ロータシャフト1の下部からロータシャフト1の上部まで送達することが可能である。様々な図は、使用可能なすべての従来のヘリコプタの運転および制御装置を示すというわけではなく、図1及び15の代表的な形に示される回転斜板40をこのような装置の例として示す。
図35は、ロータシャフト1との間で燃料、電流およびデータを送達する機能を実行する回転ユニオンの1つの例を表す。回転ユニオンは、互いに対して異なる速度で回転している可能性があるコンポーネントを接続すると共に、それらの接続の連続性を保証する、単純な方法を提供する。回転ユニオンの主要構造は、回転ユニオンハウジング63が回転ユニオンシャフト55に関して自由に回転することを可能にしている回転ユニオンベアリング50を含む、回転ユニオンハウジング63からなる。
下部燃料ライン35は、燃料が回転ユニオンシャフト55のボディに転送されることを可能にしているねじ接続によって、回転ユニオンシャフト55に接続されている。回転シャフト内部燃料ライン47は、回転ユニオンハウジング63にねじ切りされて、回転ユニオンシール49に対して上へ押圧して、回転シャフト1を通して燃料の転送を可能にしている。データ線68および電力線69は、回転ユニオンシャフト55内の機械加工した通路を通過する。これらの配線は、ベアリング支持体46の中に含まれるブラシ67へのこれらの接続の連続性を可能にする接点70に接続している。配線は、続けてブラシ67から回転ユニオンハウジング63内の通路を通って出て、ロータシャフト1の内部に沿って走っている導管(図示せず)に入る。
実施形態において、回転ユニオンの主要構造は、回転ユニオンハウジング63が回転ユニオンシャフト55に関して自由に回転することを可能にしている回転ユニオンベアリング50含む回転ユニオンハウジング63を含む。下部燃料ライン35は、燃料が回転ユニオンシャフト55のボディに転送されることを可能にするように、任意の適切な手段(例えば、ねじ接続)によって、回転ユニオンシャフト55に接続されている。例えば回転シャフト内部燃料ライン47は、回転ユニオンハウジング63にねじ切りされてもよく、回転ユニオンシール49に対して上へ押圧して、回転シャフト1を通して燃料の転送を可能にしている。データ線68および電力線69は、回転ユニオンシャフト55内の機械加工した通路を通過する。このような配線は、ベアリング支持体46の中に含まれるブラシ67へのこれらの接続の連続性を可能にする接点70に接続している。配線は、続けてブラシ67から回転ユニオンハウジング63内の通路を通って出て、ロータシャフト1の内部に沿って走っている導管(図示せず)に入る。
方位制御装置
方位制御装置12は、図1および15の代表的な形で、そして、図23の分解立体図の形で示され、このようなアセンブリをどのように航空機の方位制御のために用いることができるかについて説明する。本実施形態において、方位制御装置12は電動可逆モータであり、モータのシャフトはロータシャフト1である。方位制御が要求されると、モータは瞬間的に通電され胴体に回転力を生じさせる。ロータシャフト1およびその補助的コンポーネントの大量の回転速度のため、通電されているステータ18の正味効果によって、方位制御装置スペーサ穴44を通してスペーサ19に取り付けられている回転マグネット17に対して反力を引き起こして、スペーサ19がキーおよびキー溝23によってロータシャフト1に取り付けられる。方位制御装置12のシャフトでもあるロータシャフト1は、方位制御モータベアリング21によってモータボディ支持板20から分離される。方位制御モータベアリング21は、ロータシャフト1に付けられているシャフトクランプ22によって留められる。モータボディ支持板20およびステータ18の全ては方位制御装置ステータ保持孔51を通してファスナ54(例えば、ボルト)と一緒に連結されて、それによりステータ18およびモータボディ支持板20アセンブリが胴体構造部材56によって胴体4に取り付けられる。ステータモータ巻線73が通電されると、それらは付属のステータ18および接続コンポーネントそして胴体4を回転させる。方位制御装置12が基本的に可逆モータであるので、方位制御装置12に通電することによって作り出される効果は、航空機の時計回りであるか反時計回りの偏揺れを引き起こすことができる。ステータモータ巻線73およびマグネットロータ17上のマグネットのロータシャフト1の中心からの距離を増やすことが、方位制御装置12のより多くのトルクおよび効率を提供する点に留意する必要がある。この設計の軸方向磁束モータは、電動およびハイブリッド車で利用されるものと類似している。
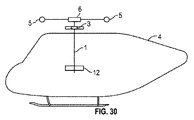
本開示は方位を制御するための他の機構も提供しており、そのいくつかは図28、29および30に例示される。図28は、方位制御のためにテールラダー8および方位制御装置12を使用している航空機の代表的な側面図である。図29は、方位制御のためにテールラダー8のみを使用している航空機の代表的な側面図である。図30は、方位制御のために方位制御装置12のみを利用している航空機の代表的な側面図である。
反トルク機構との比較
図27は、エンジン5ならびにロータシャフト1およびロータブレード3などの他の回転コンポーネントが、堅く接続された支持機構62によって胴体4にかけられる回転トルクをどのように作り出すかについて示している、従来のヘリコプタの側面概略図である。胴体4にかけられるこのようなトルクが胴体4から分離されないので、それが打ち消されない限り、それによって胴体4はロータシャフト1の軸のまわりを回転する。従来のヘリコプタは、現場の方向に相殺トルクを作り出して航空機が制御できずにスピンすることのないように保つ逆回転(反トルク)機構を使用する。この概念の1つの例は図27に示されており、それは反トルク機構としてテールロータ59およびテールブームを有する航空機を示す。対照的に、図26は本開示の実施形態を表しており、ここではロータシャフト1およびその付属物によってかけられるトルクは胴体4から分離されて、その結果胴体4はロータシャフト1のまわりを回転させられることがなく、テールロータなどの逆トルク装置の必要性が排除されている。
渦の環状態の緩和
従来のヘリコプタは、渦の環状態と呼ばれる危険な現象の影響を受ける。これは、航空機がそれ自身の吹き降ろしの中でとどまっているためメインロータの先端渦が成長し、これが先端渦を作り上げ、サイズおよび強さにおいて増幅することを許すときに作り出される、空力条件である。航空機がその吹き降ろしから出て、より新しい乱されていない空気の中に移動しない場合、渦の環状態は、ロータの上で形成されている正の空気圧力波のため、メインロータによって発生される揚力の量を減らし得る。これは、結果として、クラッシュに至ることになり得る、突然かつ制御できない高度の低下になる可能性がある。
本開示の技術は、ロータブレードの上の渦および空気圧の形成を阻害することができるかまたは抑止することができる、空気の強い向流をもたらすことができる。いくつかの実施形態では、向流は、渦が形をなす経路にエンジン5の推力線を直接置くことによって生成される。エンジン5の推力線は、ロータブレード3の上/下で水平に、そして、概してロータブレード3と同一平面で扇形に広がる、高速度空気流を作り出す。高速度空気流は、エンジン5のすぐ後ろで、そして、ロータブレード3の上に低圧領域を形成させることもでき、さらに揚力を改善して渦の環状態の影響を緩和する。従来の航空機および本開示の航空機上の渦の環状態による通常の空気流および乱された空気流の関係は、図31、32、33、34に例示される。
追加の実施形態
前記説明は、航空機の推進システムの機械要素(例えば、ロータシャフト1、ロータブレード、推力支持構造物7など)が航空機の胴体4に対して実質的に同じ配向のままである実施形態に焦点を当てているが、このような構成が必須というわけではない。実際、本開示は、航空機の推進システムの様々な機械要素の配向が変化することができる実施形態を含みかつ想定している。このような実施形態は、例えば、傾斜ロータ、垂直離着陸(VTOL)、短距離離着陸(STOL)ならびに短距離離陸および垂直離着陸(STOVL)航空機に役立ち得る。その点で、図42を参照すると、それは航空機推進システムの機械要素が胴体4に対して複数の配向の間で移行することができる1つの例示的航空機構成を示す。より具体的には、図42は、ロータシャフト1、ロータブレード3、胴体4、エンジン5、クラッチ6、推力支持構造物7、テールラダー8およびロータハブ11を含む航空機の1つの例を表し、このような機械要素は図42で示す垂直配向から水平配向に移行することができる。垂直配向と水平配向の間の(および、逆もまた同じ)このようなコンポーネントの移動は、ピボット15を用いて達成される。本実施形態において、ピボット15は約90度の可動域を可能にするが、ピボット15はいかなる所望の可動域も提供するように構成することができる。さらに、実施形態において、ピボット15は、図42に示される垂直および水平配向の間のいかなる位置でも推進システムの上記の機械要素の安定した保持を可能にするように構成される。したがって、例えば、ピボット15が90度の可動域を可能にしている場合、それは、胴体4に対して、約0度と約90度の間のいかなる角度配向でも安定して推進システムの機械要素を保持するように構成することができる。
図42のロータシャフト1、ロータブレード3、エンジン5、クラッチ6、推力支持構造物7およびロータハブ11の性質と機能は、上記説明と同一であり、簡潔にするため繰り返さない。そして、前記説明と整合して、このような機械要素の配置は、図42に示される配置に限られてはいない。例えば、推力支持構造物7およびエンジン5は、ロータブレード3の上に、ロータブレード3の下に、ロータブレード3と同一平面に、またはそれらの組み合わせで配置することができる。単一のエンジン5または複数のエンジン5からの推力は、任意の好適な方法で推力支持構造物7に印加することができる。例えば、エンジン5は推力支持構造物7に直接連結することができ、および/または、エンジン5からの推力はダクト流によって推力支持構造物7の外端に印加することができる。複数の再配置可能な推進ユニット(それぞれがロータシャフト、ロータブレード、エンジン、クラッチ、推力支持構造物、ロータハブなどを含む)も航空機で使用することができ、そのことは当業者によって理解される。そのうえ、そして、図42において示すように、翼28および1つ以上の水平安定板92は、航空機上の適切な位置に配置することができ、例えば、揚力、制御および/または安定化を提供する。使用の際には、翼28および/または水平安定板92はまた、複数の位置(例えば水平および垂直配向)の間で再適合されてもよい。その目的のために、翼28および/または水平安定板92を再適合させるための1つ以上のピボットまたは他の制御機構が、航空機に含まれることも可能である。最後に、図42はロータブレード3および関連する駆動要素の単一セットを使用した実施形態を表しているが、ロータブレード3および関連する駆動要素の複数の(例えば、2、3、4またはそれ以上の)セットも使用することができる。
胴体4または他のコンポーネントの振動、調和運動、発振、不安定性などは、本明細書において説明されている航空機の各種要素に対する機械的であるか他の応力を与えることがある。例えば従来の伝動装置がロータシャフトを回転航空機の胴体に相互接続するために用いられると、ロータブレードからの振動、調和運動および/または応力は伝動装置を通して胴体に伝達され得る。これは、航空機および/またはパイロットにとって望ましくない動作条件を生じさせる場合がある。特に、従来の伝動装置のサイズおよび位置は、ロータブレードから航空機の胴体への振動および/または調和運動の伝達を緩和するための特定のオプションの使用を妨害するかまたは妨げることさえあり得る。
それを念頭に置いて、本明細書において説明されている推進システムは、上述のように、ロータシャフトを胴体と相互接続するために従来の伝動装置を使用することを必要としない。むしろ、本明細書において説明されている推進システムはクラッチ6を使用し、それは胴体4の外部に配置することができる。その結果、従来の伝動装置によって占有されることがあり得た胴体4の中の容積は、本開示の航空機の他の用途に利用可能となり得る。例えば、このような容積は1つ以上の減衰要素を収容するために用いることができて、減衰要素はロータブレード1から胴体4(またはその中の機械要素)への振動および/または調和運動の伝達を緩和するか妨げさえするように構成される。
このような問題に対処するために、1つ以上の減衰要素を利用して、望ましくない力/応力を弱めるかまたは緩和することができる。その点について、図43を参照すると、それは、本開示と整合した1つ以上の能動的および/または受動的減衰要素を含む航空機推進システムの1つの実施例の概略側面図である。
この実施形態では、胴体4は内部容積を含むかまたは画定して、その中に胴体構造部材56が配置されている。ロータシャフト1は、クラッチ6およびロータブレード3に連結されて、胴体4の中に達する。複数の減衰要素が胴体4の中に含まれて、ロータブレード3から胴体4への振動および/または望ましくない(例えば、調和)動作の伝達を緩和するか、減衰させるかまたは、妨げさえする。
より具体的には、図43は、緩衝器82が支持ベアリング2と胴体構造部材56の間に配置されている例示の実施形態を表す。一般に、緩衝器82はロータシャフト1(および/またはロータブレード3)から胴体4への、そしてその逆の向きの、機械的および他の力(例えば、振動、調和運動、不安定性などに起因する)の伝達を弱めるかまたは緩和するように構成されている。実施形態において、緩衝器82は、ガス、液体または機械的緩衝器(例えば、ガス/液体ストラット、1つ以上の減衰ばね、それらの組み合わせなど)のような受動的減衰要素の形とすることができる。例えば、いくつかの実施形態では、緩衝器82は振動または他の望ましくない動作を吸収することができるかまたは緩和することができるハウジング(例えば、金属体)および弾性物質(例えば、ゴムなどのポリマー)を含み、したがってロータシャフト1から胴体構造部材56へのこのような力の伝達を制限するか妨げる。
1つ以上の能動的減衰要素を用いて、ロータシャフト3から胴体4への振動または他の望ましくない力の伝達を緩和するか妨げることもできる。この概念は図43に示され、それは振動低減アクチュエータ106が利用される例示の実施形態を表す。一般に、振動低減アクチュエータ106は、適切な力の印加によって振動をキャンセルするかまたは弱めるために作用する能動的減衰要素である。例えば、振動低減アクチュエータ106は、ロータブレード3または支持構造物7から来ている調和振動数または振動を適合させて、および/または相殺し、それにより、胴体4へのそれらの伝達を緩和するかまたは排除さえするように構成することができる。実施形態において、振動低減アクチュエータ106は外側の(例えば、銅)コイルを含み、内側要素(例えば鉄のロッドまたは管)はコイルの開口中心の中に配置される。コイルに対する電気エネルギーの適切な印加は、結果として内側要素の位置を変化させる電磁界の生成になり得る。内側要素の移動は、当業者によって理解されるように、入って来る振動、調和振動数などをキャンセルするかまたは緩和するような方法で、コイルに電気エネルギーを印加することによって制御することができる。
図43は単一の振動低減アクチュエータ106と組み合わせた単一の緩衝器82の使用を表すが、このような構成が必須というわけではない。いかなる数の緩衝器82および振動低減アクチュエータ106も使うことができて、このような機械要素が互いと独立して用いられ得ることを理解すべきである。さらに、このような機械要素の位置および構成は、図43に示される位置に限られてはいない。
様々なタイプのエンジンが、エンジン5として用いられてもよい。エンジンとして用いることができる適切なエンジンの非限定的な例には、往復(ピストン)エンジンおよびタービンエンジンなどのシャフトエンジン、ジェットエンジン、パルスジェットエンジン、ターボファンエンジンおよびロケットエンジンなどの反動エンジン、バンケルエンジン、ディーゼルエンジン、電気エンジン、それらの組み合わせなどが含まれる。いくつかの実施形態では、エンジン5は、パルスジェットエンジンでもよい。例えば、図44の実施形態では、エンジン5は、パルスジェットエンジンの形である。本実施形態において、エンジン5のそれぞれは、シェル84によって囲まれて、垂直空気取入口88を含む。限定されるものではないが、実施形態において、シェル84および垂直空気取入口88は、周囲環境に、そして、特に、地上および/または胴体4の方へエンジンから音が漏れるのを制限するか、減衰させるかまたは、防止さえするように構成されている。この例では、エンジン5からの推力は空気ギャップ83を通して方向を定められた後に入力配管10に入り、これが空気ギャップ83から追加の空気を巻き込んでエンジン出力を高める推力増大器として作用する。それから、推力は配管10の先端から排出され、推力支持構造物を回転させる。明らかなように、シェル84および配管10の使用は音波が環境に漏れるのを制限するか防止することができ、そして、航空機の動作の間に生じるノイズの量を減らす。
上記のように、様々な機構を利用して、方位制御を本開示と整合した航空機に提供することができる。それを念頭に置いて、図45は、本開示と整合した方位制御装置の別の例を表す。上記の方位制御装置12と同様に、図45は電動可逆モータの形である方位制御装置の実施形態を表しており、モータのシャフトはロータシャフト1である。しかしながら、この場合、モータは回転マグネット17および回転マグネットサポート87を含む可逆モータであり、その両方はロータシャフト1に連結されている。ステータ18は、胴体構造部材56によって航空機の胴体4に連結されている。1つの方向又は別の方向にモータを作動させることによって、反力がステータ18に伝達されることができ、それによって(それが胴体4に取り付けられているので)力が方位制御のために胴体4に加えられる。
前述の説明は、ロータブレード3が固定長である実施形態に焦点を当てている。しかしながら、このような構成が必須というわけではなく、いかなる固定または可変長のロータブレードもロータブレード3として用いることができる。実施形態において、ロータブレード3は可変長であり、航空機によって生成される推力を調整および/または増大するように構成することができる。例えばロータ機の動推力を改善するために、可変長ロータブレード3を使用することができて、この場合、ロータブレード3の長さは、より速い前進飛行のために垂直揚力から水平推力に移行するときに減らされてもよい。その点について、図46を参照すると、それは、本開示と整合した可変ロータブレードを含むシステムの1つの実施例の概略図である。示すように、システムは、ロータブレード3のそれぞれ(この場合、すぐ近くのロータシャフト1)の1つの(最初の)端部に接続されるブレードグリップ121を含む。各ブレードグリップ121は、親ねじ119に連結されたモータ91(例えば、リニア電気または油圧モータ)を含み、それは次に各ロータブレード3に連結され(例えば、ねじ込まれ)ている。モータ91の動作は親ねじを回転させる場合があり、結果としてロータブレード3の拡張または収縮になる。実施形態において、対向するブレードグリップ94上のモータ91は、共通シャフト(例えば、共通の親ねじ)にリンクされて、対向するロータブレードの線形位置決めを提供することができる。勿論、ロータブレード3を拡張および収縮させるための他の任意の適切な機構を使用することもできる。
作動中に、エンジン5は熱および1つ以上の排気流を生じ、それは航空機の赤外線シグネチャを変えることがあり得る。エンジン5の動作および推力支持構造物7の回転は、推力支持構造物7の温度に上昇させる場合がある。これは、いくつかの用途、特に航空機の赤外線シグネチャが重要である軍の用途では望ましくないものであり得る。それを念頭に置いて、本開示のいくつかの態様は、本開示と整合した推力支持構造物の温度を調整するためのシステム及び方法に関する。その点で、図47を参照すると、それは本開示と整合した推進システムの1つの実施例を表し、各種コンポーネントは空気流によって冷却される。例示された実施形態において、エンジン5は、推力支持構造物7の中で配管10に推力の方向を定めるジェットエンジンの形である。コンプレッサブリード空気85(すなわち、ジェットエンジンの燃料燃焼セクションのコンプレッサ段の奥からとられる空気)は、推力の周辺に向けられるかまたは中に注入される。コンプレッサブリード空気85が推力より冷たいので、コンプレッサブリード空気85の推力との混合は配管10を冷やして、したがって、推力支持構造物7を冷やす。この技術は、他のタイプのエンジン5で同じように適用することができる。前述の説明は、多くの場合推力支持構造物7の全体または一部が外部環境にさらされる実施形態に焦点を当てている。このような実施形態が有用である一方で、推力支持構造物7自体の空気力学はいくつかの用途にとっては理想的でない場合がある。例えば、推力支持構造物7の形状は、飛行中の航空機の抗力係数および効率に影響を与え得る。例えば、推力支持構造物7の形状が球形である場合、抗力係数は、ホバリングの間の、または、前進飛行中の航空機姿勢に関係なく同一である。球形の形状の推力支持構造物は航空機設計を単純化することができるが、それは所望の抗力係数を提供することができない。例えば、より小さい抗力係数は、球体とは対照的に、エアフォイル形状を用いて得ることができる。
それを念頭に置いて、本開示の態様は、推力支持構造物の空力調整ができるようにする推進システムに関する。 その点について、図48を参照すると、それは本開示と整合した整流板を含む推力支持構造物7の1つの実施例の側面および縦断面図を表す。例示された実施形態において、推力支持構造物7は、エアフォイル形状の整流板89によって囲まれている。従来技術において理解されているように、接近する空気に対するエアフォイルの角度はその抗力プロフィールに影響を与える。したがって、エアフォイル形状の整流板89が常にロータシャフト1と垂直で、ロータシャフト1が前進飛行中に前方に傾けられる場合、航空機移動方向はエアフォイル形状の整流板89ともはや平行でなく、結果として不必要な抗力になることがあり得る。この問題に対処するための1つのオプションは、エアフォイル形状の整流板89が推力支持構造物に沿って回転して航空機の姿勢または動きに関係なく低い抗力係数を維持することを可能にするベアリングと一緒に、推力支持構造物を含むエアフォイル形状のシェルを使用することである。このようにして、エアフォイル形状の整流板89は、推力支持構造物7が遭遇する支配的な空気流に「風向計的に動く」ことを可能にする。モータを使用して、あり得るセンサ入力に基づいて自動的にエアフォイルを移動してその角度を最適化することもでき、あるいは、モータをパイロットが手動で制御して航空機の全体の揚力を改善するかまたは必要に応じて空力ブレーキ効果を作成することができる。
したがって、実施形態において、整流板89は、推力支持構造物の空気力学が推力支持構造物7の周囲を動く優勢な空気流に対して流線形となることができるように構成される。その目的のために、整流板支持ベアリング90は整流板89の各先端に配置されて、整流板89が推力支持構造物7およびエンジン5に関して自由に移動することを可能にする。1つ以上の位置決めモータ91は、推力支持構造物7に含まれて、ロータシャフト1に比較的近くに配置することができる。このようなモータ91は、能動的に整流板89及び推力支持構造物7の方向(そして、したがって、空気力学)を変更するために通電することができる。整流板89(そして、したがって、推力支持構造物7)の位置の適切な制御を行うことによって、この構造が、空気流に対する推力支持構造物の方向における変更に関係なく、推力支持構造物7の周囲を動く空気流に空気力学的に流線形となることができる。
前述の説明は、多くの場合推力支持構造物7およびロータブレード3がクラッチ6を有するロータシャフト1に接続している実施形態に焦点を当てている。クラッチ6は前述したように多数の利点を提供することができるが、その使用は必須というわけではない。例えば、図49は、推力支持構造物7およびロータブレード3がクラッチ6を用いずにロータシャフト1に接続されている(例えば、堅く接続されている)推進システムの実施形態を例示する。この例示した実施形態は他の説明されている実施形態の利点を提供できないが、それは、このような利点が求められない場合では興味深いものである。例えば、このような構成は、無人航空機などの特殊目的航空機のために使用することができる。
図42に関して前述したように、本開示と整合した推進システムの配向は、垂直配向から水平配向に移行することができて、逆もまた同じである。このような実施形態では、推進システムを配向するいかなる適切な機構も使用することができる。その点で、図50を参照すると、それは、スライド式レールシステムが垂直配向と水平配向の間の推進システムの全体または一部の再配向を容易にする、航空機推進システムの実施形態を例示する。本実施形態において、フレームレールガイド93は、航空機の胴体4の外側に沿って配置されている。フレームレールガイドはいかなる適切な位置にも配置することができるが、実施形態では、それは胴体4の中央に沿って位置決めされる。加えて、ロータシステムカートハウジング95は航空機の推進システムのベースに連結されており、そのためロータシステムカートハウジングが胴体と推進システムの間にある。フレームレールガイド93は、示すように、推進システムが垂直および水平の配向間で移行するにつれて、ロータシステム自動車のハウジング95に連結されたローラ94(または他のガイド機械要素)をガイドするように構成されている。 ローラ94(または他のガイド機械要素)は、垂直揚力のための所望の推力線または前進飛行のための水平推力に応じて垂直または水平配向にロータシステムカートハウジング95を移動するために、直接または間接的に(例えば、電気または油圧モータを用いて)動かすことができる。翼28および水平安定板92は、ロータブレードに対して比較的垂直なままであるように配向して、前進飛行の間、揚力および安定性を提供することができる。
推力支持構造物に直接組み込まれるエンジン5を含む推進システムの様々な実施形態は、上で説明してきた。例えば、図47は、1つ以上のジェットエンジンが推力支持構造物7に組み込まれて、配管10を通して推力を提供して推力支持構造物に回転させる実施形態を表す。このようなエンジンによって生成される推力が(例えば、固定ノズルを通して)固定方向に定められてもよいが、いくつかの例では、推力支持構造物7から出る推力の方向を制御することが望ましい場合もある。その点で、図51を参照すると、これは、方向推力制御ができるようにする1つ以上の関節動作式ノズルを含む推力支持構造物を含んでいる推進システムの1つの実施例の側面図である。示すように、関節動作式ノズル96は、推力支持構造物7の対応する先端に連結されて、配管10から推力を受け取るように構成されている。ノズル96は、推力が流れる出口(別個にラベル付けしていない)をそれぞれ含む。ノズル96はそれらのそれぞれの出口を移動するかまたは再適合させるように(例えば、1つ以上の駆動モータによって)関節接続することができ、したがって、推力支持構造物7から出る推力線の直接制御を可能にしている。図36および図37は、エンジン5が推力支持構造物7に直接組み込まれて、クラッチ6からすぐ外側に配置されている別の実施形態を示す。エンジン5は、ギアボックス26に接続されていて1つ以上のダクト付きファンまたはプロペラ24を駆動するドライブシャフト27に動力を供給する。図38および39の実施形態において、エンジン5は、ロータシャフト1に直結されている推力支持構造物7に、直接組み込まれている。エンジン5は、ダクト付きファンまたはプロペラ24を駆動するためにギアボックス26に接続されているドライブシャフト27に動力を供給する。クラッチ6はロータハブ11に組み込まれており、それにより、ロータブレード3は、クラッチが分離状態であるときドライブシステムコンポーネントから独立して回転することができる。
本開示の多くは、ロータブレードの単一のセットが利用される実施形態に焦点を当てている。このような構成が必須というわけではなく、任意の適切な数のロータブレードを使用してもよい。例えば、1、2、3、4セットまたはそれ以上のセットのロータブレードが、本明細書において説明されている航空機推進システムで利用されてもよい。その概念を例示するために、図52を参照すると、それは、本開示と整合した、単一の推力支持構造物によって駆動される複数セットのロータブレードを含む推進システムの1つの実施例を表す。本実施形態において、推力支持構造物7は、内側シャフト81を通してトルクを提供する。トルクはクラッチ6を介して内側シャフト81によって外側シャフト80に伝達されて、それぞれが外側シャフト80に接続されているロータブレード3の複数のセットを駆動する。ロータブレードの各セットの位置は変化することができて、所望の飛行特性を達成するために設定することができる。図52の実施形態において、例えば、ロータブレード3の2つのセットは、互いに平行であるが同じ軸上からはずれて(例えば、約1度 〜約10度)取り付けることができ、例えば、空力および音響性能を高めることができる。このような配置は、ロータ3の下部のセットがロータ3の上部のセットの伴流を捉えることを可能にすることによって、より大きな揚力を生じさせることもできる。さらに、ロータの両方のセットを同じ方向に駆動して、逆回転ブレードによって生成される伴流干渉問題を回避することができる。そして、ロータ3の複数のセットの使用によって、ロータブレード3の単一のセットと同等な量でありながらより小さい設置面積の中で揚力を生成することを可能にすることができる。
本明細書において説明されている技術は、多種多様な航空機設計で実施することができて、図の多くに例示されているものなどの比較的従来型のヘリコプタ設計での使用に限られてはいない。実際、本明細書において説明されている技術は、それらの使用から利益を得ることができるあらゆるタイプの航空機設計において有用性がある。例えば、本開示の技術は、いずれもヘリプレーンと呼ばれることがある、複合ヘリコプタ、複合ジャイロプレーンなどのハイブリッド航空機で用いることができる。このような航空機揚力において、ヘリコプタと同様のロータシステムは、離着陸中に使用することができて、二次推進システム(例えば、プッシュまたはプルプロペラ、1つ以上のジェットエンジン、1つ以上のターボファンエンジンなど)を用いて飛行中に水平(前方および/または後方)推力を提供する。揚力は全身/逆進飛行中に翼によって生成されることもでき、ヘリコプタと同様のロータブレードの速度を減じることができる。
図53は、複合ヘリコプタの環境における本開示の技術の使用の1つの実施例を表す。例示された実施形態において、航空機は、推力支持構造物7(エンジン5および配管10を含む)によって駆動される複数セットの同軸ロータブレード3を含む複合ヘリコプタである。航空機はスラスタ97をさらに含んで、飛行中に前進推力を提供する。本実施形態において、スラスタ97は単一のプッシュプロペラであるが、いかなる適切なタイプおよび数のスラスタも使用できることを理解すべきである。例えば、スラスタ97は、1つ以上のジェットエンジン、ターボファンエンジン、ロケットエンジン、ファン、プロペラ、それらの組み合わせなどでもよい。
作動中に、同軸ロータブレード3は揚力のために使用することができて、スラスタ97は、航空機を所望の飛行条件に応じて加速するか、減速するか、または静止状態に保つために使用することができる。航空機が前進飛行であるときに、揚力は翼28によって与えることもできる。このような実施形態では、前進飛行においてロータ3によって直接与えられる揚力の必要性が減っているため、ロータ3の速度は、例えば、エンジン5の速度を落して、および/または、一時的にそれらをシャットダウンすることによって、減速することができる。このような例において、方位制御のためのホバリングにおいて使われるモータ(図示せず)は、ロータシャフト1(図53においてラベル付けされず)へ一定の低動力を供給して安定性と制御を維持するために、再度タスクを与えられてもよい。このような状態で起こっている偏揺れ運動(もしあれば)は、安定器(例えば、垂直安定板 、図示せず)を用いて相殺することができ、それに応じて減らすことができる。
図54は、複合ヘリコプタの環境における本開示の技術の使用の別の実施例を表す。本実施例は、図53の実施形態で使われた複数の同軸ロータブレードの代わりに、ロータブレード3の単一のセットが使われていることを除いて、図53の実施形態と実質的に類似している。図54の機械要素の性質および機能が図53に関して上に示して説明したものと同じであるので、それらは簡潔にするためにここでは繰り返さない。
前述の実施形態の多くは、クラッチ6、推力支持構造物7およびロータブレード3の1つ以上のセットを含む推進システムを利用して、ここでは、推力支持構造物7およびロータブレード3は互いに連結されて、ロータシャフト1に沿って互いから垂直に中心を外れている。このような構成が必須というわけではなく、本開示は、クラッチ6が用いられない、および/または、ロータブレード3および推力支持構造物がロータシャフト1に連結されて、同一平面に位置決めされている実施形態を含む。この概念の1つの実施例は図55に示されて、これは、本開示と整合した推進システムの1つの実施例の上面および側面図を表し、推進システムはクラッチ6を含まないが、同一平面にある推力支持構造物7およびロータブレード3を含む。より詳しくは、本実施形態では、推力支持構造物7およびロータブレード3が共通構造ハブ98に一体化されているか連結されており、これが次にロータシャフト1に一体化されているか連結されている。共通構造ハブ98は、1つ以上のファスナ、機械的干渉ジョイント、溶接、接着、それらの組み合わせなどを介するなどして、任意の適切な手段によってロータシャフト1に一体化されるかあるいは固定して取り付けられている。より詳しくは、共通構造ハブはロータシャフト1に一体化されるかまたは連結されて、そのためその位置はロータシャフト1の位置に対して固定されたままである(すなわち、共通構造ハブ98は、ロータシャフト1と独立して回転はしない)。同様に、推力支持構造物7およびロータブレード3は、1つ以上のファスナ、機械的干渉ジョイント、溶接、接着、それらの組み合わせなどを介するなどして、任意の適切な手段によって共通構造98に一体化されるかあるいは連結されてもよい。作動中に、エンジン5は推力支持構造物7を回転させる。結果として得られるトルクは推力支持構造物7から共通構造ハブ98へ、そして、次にロータシャフト1に伝達されて、ロータシャフト1を回転させる。共通構造ハブ98がロータシャフト1に固定して取り付けられるので、ロータシャフト1の回転が最終的にロータブレードを回転させる。
ジェットまたは他のエンジンが、推力支持構造物に連結されるかまたは一体化されており、配管を通して方向を定められている空気流の形で推力を発生させて推力支持構造物を回転させるように動作可能である、様々な実施形態を上記で説明してきた。このような実施形態が役立つ一方で、推力支持構造物を通るダクトで送られた空気流の使用が必須というわけではなく、他の構成が使用されてもよい。例えば、推力支持構造物に連結されるかまたは一体化されている1つ以上のエンジンは、1つ以上のドライブシャフトに連結することができ、それが次に1つ以上のファンに連結されてもよい。動作において、エンジンはドライブシャフトにファンを駆動して空気流を生じさせることができ、それは固定であるか可変的な方向に放出されて、推力支持構造物を回転させることができる。
図56は、1つまたは複数のファンがモータによって駆動されて固定であるか可変的な方向に向けることができる空気流を生じさせる、本開示の一実施形態を表す。より具体的には、図56は、複数のエンジン5が推力支持構造物7の近位端に連結されるかまたは一体化されており、ロータハブ1に近接して配置されている実施形態を表す。ドライブシャフト27の第1の(近位)端部は、各エンジン5に連結されている。各ドライブシャフト27は、推力支持構造物7の外部に配置されてもよく、または推力支持構造物7の中のチャネルを通り抜けてもよい。いずれの場合でも、各ドライブシャフト27の第2の(遠位)端部は、推力支持構造物7の遠位端にあるファンユニット99に連結されている。動作において、エンジン5は、ドライブシャフト27がファンユニットに空気流を生じさせるようにする。各ファンユニット99は、推力支持構造物7と同一であるか実質的に同一の平面にある空気流を作り出すように配向される。そうすることによって、推力支持構造物7が動いている一方で、各ファンユニットのファンブレードおよびファンブレードハブ(図示せず)上の負荷さえ容易にすることができる。
本実施形態において、空気流ガイドベーンノズル100は、各ファンユニット99に連結されて、各ファンユニット99によってできる空気流の方向を定めるように構成されている。例示された実施形態において、空気流ガイドベーンノズル100は、ファンユニット99からの空気流を、この場合推力支持構造物7の平面に対しておよそ90度である、所望の出口角へリダイレクトするように構成されている静的ノズルである。例示した構成は例としてのためだけのもので、ガイドベーンノズル100は、ファンユニット99によってできる空気流をいかなる所望の出口角にもリダイレクトするように構成することができる。そして、実施形態では、ガイドベーンノズル100および/またはその出口は、(例えば、図示していないが、1つ以上のモータによって)関節接続することができ、それにより、空気流出口角の動的制御を可能にする。出口角の制御を行って、空気流を望ましい角度にリダイレクトして、推力支持構造物7およびクラッチ6を動かすために推力を発生させることができる。例えば、ガイドベーンノズル100の使用によって、ファンユニット99によってできる空気流を、推力支持構造物の平面に対して0度から180度以上までリダイレクトすることを可能にし得る。
推力支持構造物7の遠位端の近くのロータシャフト1およびファンユニット99に近接してエンジン5を位置決めする1つの利点は、推力支持構造物7が動いている間に加えられる向心力が、ファンユニット99による推力の生成から作り出されるブレード負荷によって部分的に相殺され得るということである。このようなブレード負荷は、ドライブシャフト27およびエンジン5の方へファンユニット99のファンブレードを引き戻すことができる。さらに、ドライブシャフト27が推力支持構造物7より非常に薄くてもよいので、図56の構成は、配管10を含む推力支持構造物7の部分に対して、推力支持構造物7のより薄い中間部を使用可能にすることができる。
図57は、推力支持構造物7の遠位端に位置するか近接して位置する1つ以上のファンユニットを利用して、推力を発生させて推力支持構造物を回転させる、本開示の別の実施例を表す。本実施形態において、ファンユニット99は、遠心送風機101の形である。ファンユニット99と同様に、遠心送風機101はドライブシャフト27によって駆動され、それは次に1つ以上のエンジン5によって駆動される。動作において、各遠心送風機101は、ドライブシャフト27によって駆動されて、トルクを作り出して推力支持構造物7を駆動して、次に、ロータブレード3を回転させる空気流を生じさせる。遠心送風機101の配向は、所望の空力条件を達成するように設定することができる。例えば、そして、図57に示すように、遠心送風機101は、第1軸に沿って比較的長いが、第1軸に対して直角である第2軸に沿って比較的薄くてもよい。このような例において、遠心送風機101は、それらの長寸(第1軸に沿った)が推力支持構造物7に沿って伸びている軸に対して直角(例えば、垂直であるか実質的に垂直)であるように、配向することができる。対照的に、遠心送風機101の短寸は、推力支持構造物7に沿って伸びている軸と平行であるかまたは実質的に平行であるように配向することができる。このような構成において、遠心送風機101の比較的薄い寸法は推力支持構造物7の回転の方向に示され、それは遠心送風機101によって作成される誘導抵抗を推力支持構造物7が回転するにつれて低減するかまたは最小化することができる。
図56と同様に、図57の実施形態は、ドライブシャフト27を使用できるようにし、配管10を含む推力支持構造物の形状に対して、より薄型形状の推力支持構造物7の使用を可能にする。そして、ガイドベーンノズル100と同様に、遠心送風機101の配向は、固定することができるかまたは関節接続することができる。後者の例では、遠心送風機101の関節は、それらが発生させる空気流の出口角の動的制御を可能にすることができる。
図41は、本開示による別の実施形態を表して、ここでは、同心シャフトを用いて航空機の各種コンポーネントを支持し、分離する。示すように、外側シャフト80は、ロータブレード3に直結にされて、支持ベアリング2によって支持されて、胴体から分離される。内側シャフト81は外側シャフト80の中に配置されており、推力支持構造物7に直結されて、それが次にエンジン5に接続されている。内側シャフト81は、同心のシャフトベアリング79によって外側シャフト80から支持されて分離され、それは外側シャフト80の内部表面と内側シャフト81の外部表面の間に配置されている。クラッチ6は、内側シャフト81および/または外側シャフト80を係合するかまたは分離するように構成されており、任意の適切な位置に配置することができる。例えば、そして、図41に示すように、クラッチ6は、外側シャフト80内に(すなわち、外側シャフト80と内側シャフト81の間に)配置することができて、内側シャフト81と係合し分離するように構成することができる。図41は、推力支持構造物7が内側シャフト81に連結され、ロータブレード3が外側シャフト80に連結されている実施形態を表しているが、このような構成が必須というわけではなく、推力支持構造物およびロータブレード3がそれぞれ内側シャフト81または外側シャフト80に連結できることを理解すべきである。
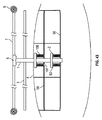
図58は本開示の別の実施形態の側面図であり、別個のシャフトが、制御システム、ロータシステムおよび駆動システムなどの航空機推進システムの異なるコンポーネントのために利用されている。図58の機械要素の多くのものの性質および機能は、他の実施形態に関連して上記で説明したもの同一であり、簡潔にするために繰り返さない。本実施形態において、例示した推進システムは、外側シャフト80、内側シャフト81および中間シャフト102を含む。中間シャフト102は、外側シャフト80と内側シャフト81の間に配置されている。外側シャフト80は、それが回転しないように、胴体構造部材56に(例えば、シャフトマウント103によって)固定される。ピッチ制御ロッド41は、ロータブレード3にリンクされてロータ制御を提供する回転斜板40に接続している。中間シャフト102は、同心のベアリング79によって外側シャフト80から分離されている。ロータハブ11およびロータブレード3は、中間シャフト102に直結していて、それによって支持されている。内側シャフト81は同心のシャフトベアリング79によって中間シャフト102から分離されて、推力支持構造物7からのトルクおよびファンユニット99を駆動しているエンジン5が推力を発生させるときに、クラッチ6によって中間シャフト102に接続しているだけであり、内側シャフト81および中間シャフト102を同時に回転させる。この配置は、強力な支持システムを推進システムの様々なコンポーネントに提供して、このようなコンポーネントの直接の交換またはサービス作業を可能にする。これによって、航空機の改良または任務が変化するにつれて、コンポーネントが独立してモジュール型でアップグレードされることも可能である。燃料タンク33およびバッテリ74は、下部回転ユニオン16および内側シャフト81の内部に沿って走る接続を通してエンジン5に接続されている。図58に示される他のコンポーネントは、他の実施形態で説明されており、単に複数のシャフトが用いられ得る完全な実施形態を例証するために示されている。勿論、複数のシャフトは、同様に他の実施形態で用いることができる。複数のシャフトを使用する1つの利点は、それによって推進システムのコンポーネントがモジュール式であり、独立して、または、ユニットとしてアップグレード可能とすることができるということである。
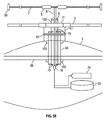
上記実施形態の多くにおいて、燃料タンクおよびバッテリなどのエネルギーソースは、航空機の胴体の中に置かれて、胴体ビザ燃料ライン、ワイヤなどの外部にあるコンポーネントに連結されている。このような構成が必須というわけではなく、バッテリ、燃料タンクなどのエネルギーソースは他の位置に置いてもよい。その点で、図59を参照すると、これは燃料タンクおよびバッテリなどのエネルギーソースが推力支持構造物に一体化されているかまたは連結されている航空機推進システムの1つの実施例の側面図を表す。外側シャフト80に接続されているロータブレード3および回転斜板40は、胴体構造部材56に接続されている支持ベアリング2の別個のセットによって支持されている。燃料タンク33、バッテリ74およびエンジン5の全ては推力支持構造物7に取り付けられており、電力線、燃料ラインなどを内側シャフト81に通す必要性を排除する。加えて、無線コントロール/テレメトリモジュール105は、エンジン5に対する通信およびデータのシグナリングを可能にしている。したがって、内側シャフト81は、燃料ライン、電力ケーブル、制御線など、そうしなければその中を経由する可能性があるものを取り除いたり移動する必要なしに、修理点検することができる。例えば、内側シャフト81は、支持ベアリング2、同心のシャフトベアリング79およびクラッチ6で接続を分離することによって、胴体4から取り除くことができる。このような構成は、シャフト間に燃料ライン、制御線、電力線などを経路設定するために用いることができる軸封装置および/またはスリップリングの必要性も排除することができる。図60は、本開示と整合した推進システムを含む航空機の別の実施形態の概略側断面図である。本実施形態において、ロータシャフト1は胴体4の中に伸び、そしてベアリング支持構造43および推力ベアリングアセンブリ57の中の1つ以上の支持ベアリング2によって支持されている。本実施形態において、支持ベアリング2は、ベアリングハウジング107の中に配置されており、内側および外側レースケージの間にあるボールベアリングを含む。いずれ場合でも、内側および外側レースの支持ベアリング2は、ロータシャフト1の負荷を支持するように構成されている。
支持ベアリング2は、任意の適切な手段によって、例えば、ベアリング支持構造43に(例えば、溶接、機械的ファスナなどによって)取り付けられているベアリングハウジング107によって、ベアリング支持構造43に連結されている。実施形態において、ベアリング支持構造43は、ロータシャフト1から支持ベアリング2へ伝達される負荷を支持するのに十分な強さおよび特性を有する、金属、合金、複合材料または他の適切な材料などの任意の適切な材料から形成されている、中空管状フレームの形である。ベアリング支持構造43は、任意の適切な方法で(例えば、溶接、機械的ファスナ等によって)、胴体4に取り付けられる。
実施形態において、支持ベアリング2の外側レースは、ベアリングハウジング107を介してベアリング支持構造43に連結されており、支持ベアリング2の内側レースはロータシャフト1の外部表面に(例えば、機械的ファスナ、溶接または他の適切な固定手段を介して)連結されている。このような実施形態では、ロータシャフト1の回転によって生じた回転トルクは、胴体4をこのようなトルクから分離する支持ベアリング2の能力を上回らない。
図60の実施形態は、回転マグネット17およびステータ18をさらに含む。回転マグネット17は、ロータシャフト1にそのハブで連結されるディスク形構造上に配置され、そのためディスク形構造およびロータシャフトが同時に一緒に回転することができる。本実施形態におけるステータ18は一対の(例えば、金属)プレートおよび金属(例えば、銅)コイルの形であり、それは回転マグネット17の上下に配置されて、支持構造物43を露出することによって胴体4に連結されている。勿論、ステータ18は例示した構成に限られておらず、航空機のために必要とされる方位制御の量に応じて、1対または2対以上のプレートおよびコイルを含むことがでる。
本実施形態において、ロータブレード3はロータハブ11に連結されており、それは次にロータシャフト1に連結されている。したがって、ロータシャフト1の回転は、ロータブレード3を回転させる。例示の実施形態は下部シャフトフランジカラー108および上部シャフトフランジカラー109も含み、それらはロータシャフト1にその上端の近くで連結されている。本実施形態において、下部シャフトフランジカラー108および上部シャフトフランジカラー109は、ロータブレード3の上にあり、クラッチ6のロータシャフト1への取り付けポイントを提供する。
クラッチ6は、ロータシャフト1を推力支持構造7と係合して/分離するように構成されている。上記のように、クラッチ6は、2つの回転構造部材を係合および分離することができる一方向ベアリングまたは他の類似の装置であることができる。クラッチ6の内側レースは、例えば、機械的ファスナを介して、または、他の手段を通して、下部シャフトフランジカラー108と上部シャフトフランジカラー109の間に連結され、そのためにそれが上部フレームレールフランジ110および下部フレームレールフランジ116に取り付けられて、ロータシャフト1によって回転することができる。
図60の実施形態において、推力支持構造物7は、上部フレームレールフランジ100、下部フレームレールフランジ116、フレームレール112、横材111、エンジンマウント113、エンジン5、配管フランジ115および配管10を含む。推力支持構造物7の中心線は、ロータシャフト1に垂直に伸びて、180度離れている。上部フレームレールフランジ110および下部フレームレールフランジ116は、1つ以上の金属、合金、複合材料などの任意の適切な材料から造ることができる。上部フレームレールフランジ110および下部フレームレールフランジ116は、任意の適切なな方法で、例えば溶接、機械的ファスナなどを介して、クラッチ6の外側レースに連結される。
一般に、フレームレール112は構造支持を提供し、エンジンマウント113に連結され、これが任意の適切な方法でフレームレール113に固定される。実施形態において、フレームレール112は、任意の適切な数の強化横材111を含む1つまたは複数の構造レールから形成されている。エンジン5は、長手方向にフレームレール112の間に載置されている。例えば、エンジン5は、その(例えば、それらの吸入および排気部に近い)両辺上に締め具取付け位置を含むことができて、このような締め具取付け位置を介してフレームレール112の間に載置することができる。フレームレール112は、配管フランジ115にも連結されている。配管フランジ115はエンジン5の排気通路を取り囲み、それらの推力が配管10へ伝達されるのを可能にする。配管10は、空気流を引き込んで、熱および向心力に対して構造的完全性を維持するのに十分である金属または合成材料または他の材料でできている、単純な、丸いか、卵円であるか、流線形の形の中空管とすることができる。実施形態において、配管10は、エンジン5の排気通路の近くの配管フランジ115から適切な長さまで、エンジン5から発生している高速度空気流が配管10の外端で推力を提供するのを可能にするために伸びて、ロータブレード3に動力を与えるのに必要な回転トルクを発生させて、飛行に十分な揚力を提供する。
本開示と整合した推力支持構造物の回転は、航空機の飛行を促進し、推力支持構造物とは別個のロータブレードの必要性を減らすかまたは排除さえするために利用することができる揚力を、それ自体の中でそれ自身で提供することができる。言い換えると、本開示と整合した推力支持構造物は、航空機用のロータブレードとして役立つように構成することができる。このような構成は、航空機胴体の上の構造と関連した抗力を排除するか、低減するかまたは、最適化することを含むがこれに限らず、様々な利点を提供することができる。例えば、推力支持構造物が航空機用のロータブレードとして機能するときに、別個のロータブレードの必要性は減らすことができるかまたは排除されることさえでき、別個のロータブレードの使用に起因している抗力および他の非効率性を制限するかまたは排除さえする。別個のロータブレードの排除はまた、クラッチがロータシャフトからロータブレードを係合して分離する必要性を減らすかまたは排除することもでき、クラッチの使用に関連した機械的複雑さおよび効率上の考慮事項を回避することができる。したがって、本開示の実施形態は航空機用の推進システムに関するものであり、推力支持構造物はロータブレードとして機能するように構成されている。
その概念の実施例は図61〜64に示され、それらは本開示と整合した推進システムの様々な実施形態を表し、推進システムはロータブレードとして機能するように構成された推力支持構造物7を含む。このような実施形態において、推進システムは、前に説明しているように、ロータハブ11または共通構造ハブ98を含む。エンジン5は、ロータハブ11または共通構造ハブ98に連結されており、そのため、近位端がロータハブ11または共通構造ハブ98の近くに(すなわち、近接して)配置されている。したがって、エンジン5の少なくとも一部が完全に、または、部分的に共通構造ハブ98/ロータハブ11によって支持されていることを理解すべきである。エンジン5は、配管10にも連結されている。あるいは、エンジン5は、ロータハブ11または共通構造ハブ98と一体化され(例えば中に収容され)ていてもよい。
配管10はその中に1つ以上のチャネル10’を含む。示すように、配管10の近位端は、遠位端エンジン5に連結されている。説明のために、図61〜64の実施形態は、エンジン5が配管10および共通構造ハブ98/ロータハブ11と同一平面に配置されており、そのため配管10の近位端がエンジン5の遠位端に直接連結されていることを示す。その構成が必須というわけではなく、エンジン5および配管10はいかなる適切な方法でも配置することができる。例えば、エンジン5は、ロータハブ11/共有構造ハブ98の上か下か側部に中心を外れていてもよく、そして配管10は、そこにチャネル10’に流動的に連結することができる1つ以上のチャネルを含む接続部材によって連結されてもよい。
さらに一般的に言えば、エンジン5は、任意の適切な方法で配管10に連結することができる。例えば、そして、図61〜64に示すように、エンジン5は、示すように、カップラ120を介して配管10に連結することができる。一般に、カップラ120は、配管10をエンジン5に、例えば、回転接合、ガスシールまたはブレードグリップを介して、流動的に連結するように機能する。どの場合でも、カップラ120は、エンジン5および配管10のチャネル10'と流動的に連結するように構成された少なくとも1つのつながったチャネル(図示せず)を含むことができる。したがって、エンジン5によって生成される推力は、カップラ120のつながったチャネルを通してチャネル10'の中に流れることができる。実施形態において、カップラ120は、エンジンによって生成される推力がチャネル10'に伝達されるのを可能にするとともに、それでも配管10が、例えば関節動作可能なロータブレードと同じ方法で、軸の周りを旋回することができるようにする。その点で、カップラ120は、回転可能なジョイント、回転可能なガスシールまたは回転可能なブレードグリップの形であることができる。このような例では、配管10の配向は、示すように、コントロールアーム41または回転斜板40を介して制御することができる。
配管10は、推力支持構造物が回転するにつれて、揚力を発生させることができるいかなる外部の形状も有することができる。説明を簡単かつ容易にするために、配管10は中空の楕円体の形で図61に例示されているが、当業者によって理解されるように、他のいかなる好適な形も用いることができる。実施形態において、配管10はその中に1つ以上のチャネル10'を有するエアフォイルの形であるが、あらゆる周知であるか今後開発されるロータブレード形状を使用することができる。実施形態において、配管10の外部の形状は、その部分が、推力支持構造物7がロータハブ11/共通構造ハブ98の軸の周りを回転するにつれて、大部分の揚力を生成するように構成されている。例えば、配管10の外部の形状は、配管10の外側の3分の1が揚力の大部分を提供するように構成することができる。このような実施形態では、配管の外部の形状は、先端ジェット駆動のSud−Ouest Djinnヘリコプタにおいて使用されるロータブレードの形状と同一であるか、類似していてもよい。
いずれの場合も、推力(例えば、排気、コンプレッサブリード空気等の形で)がチャネル10'を通して配管10の遠位端に向かって方向を定められるように、配管10はエンジン5に流動的に連結することができる。推力(空気流)は、推力支持構造物を回転させるような方法で、チャネル10'から出る方向に向けることができる。例えば、そして、図62に示すように(および、上の図56の記述と整合して)、推進システムは、推力支持構造物7と同じかまたは実質的に同じ平面である空気流を生成するように構成することができる。その目的のために、そして、図62に示すように、実施形態で、推進システムは、配管10の遠位端に連結する空気流ガイドベーンノズル100を含む。図56の記述と整合して、空気流ガイドベーンノズル100は、エンジン5によって作られて、チャネル10'の中を流れている空気流の方向を定めるように構成されている。図62の実施形態において、空気流ガイドベーンノズル100は、配管10'から、所望の、例えば、推力支持構造物7の平面に対して約90度の出口角へ空気流をリダイレクトする(向きを変える)ように構成されている静的ノズルである。例示した構成は例としてのためだけのもので、ガイドベーンノズル100は、エンジン5によってできる空気流をいかなる所望の出口角にもリダイレクトするように構成することができる。実施形態では、ガイドベーンノズル100および/またはその出口は、(例えば、図示していないが、1つ以上のモータによって)関節接続することができ、それにより、空気流出口角の動的制御を可能にする。出口角の制御を行って、空気流を望ましい角度にリダイレクトして、推力支持構造物7およびクラッチ6(用いられるとき)を動かすために推力を発生させることができる。例えば、ガイドベーンノズル100の使用によって、エンジン5によってできる空気流を、推力支持構造物7の平面に対して約0度から約180度以上までリダイレクトすることを可能にし得る。
図63は、ロータブレードとして機能して、方向推力制御ができるようにする1つ以上の関節動作式ノズルを含む推力支持構造物を含んでいる推進システムの1つの実施例の側面図である。示すように、関節動作式ノズル96は、配管10の対応する先端に連結されて、チャネル10'から推力を受け取るように構成されている。ノズル96は、推力が流れる出口(別個にラベル付けしていない)をそれぞれ含む。ノズル96はそれらのそれぞれの出口を移動するかまたは再適合させるように(例えば、1つ以上の駆動モータによって)関節接続することができ、したがって、推力支持構造物7から出る空気の推力線(推力)の直接制御を可能にしている。図63に示される他のコンポーネントは、他の実施形態で説明されているので、簡潔にするためにここで再説明はしない。
図64は、本開示と整合した、ロータブレードとして機能する推力支持構造物を含む推進システムの別の実施形態を表す。図64のコンポーネントの多くのものの性質および機能は、図60に関連して上で説明されているので、簡潔にするために表していない。しかしながら、図60の実施形態とは異なり、図64の実施形態には、別個のロータブレード3が無く、その代わりに、配管10(またはさらに一般的には、推力支持構造物7)をロータブレードとして利用する。図63および64の実施形態も、それらがクラッチ6を含むという点で、図61および62の実施形態と異なる。クラッチ6の使用の説明は、ロータブレードとして機能する推力支持構造物の環境におけるその使用を示すために設けられているが、図61および62に示すように必須というわけではない。
本開示と整合した推進システムの別の実施形態は、それぞれがロータブレードとしての働きをする1つ以上の推力支持構造物を含み、1つ以上の胴体搭載のエンジンからの空気流はロータシャフトを通して、そして、ロータブレードのうち1つ以上の内部のダクトを通してリダイレクトされる。このようなシステムは、図63、64に示して上で説明されたように、配管に連結された1つ以上のエンジンを含んでいる推力支持構造物の有無にかかわらず、使用することができる。いずれの場合も、1つ以上の推力ダイバータは、胴体搭載のエンジンの排気流の中に位置することができて、このことにより生成される空気流のフローを制御するように構成されている。より具体的には、推力ダイバータは、ロータシャフトに方向を定められて(向けられて)、1つ以上のロータブレード内部の配管に分配された胴体搭載のエンジンによって生成される空気流の量を制御するように構成されている。
垂直飛行の間、胴体搭載のエンジンによって生成される空気流のすべてまたは有意な部分は、推力ダイバータによってロータシャフトに向けられて、そして、(例えば、プレナムによって)1つ以上のロータブレードに方向を定めることができる。このように方向を定められた空気流は、その先端に近接した開口部を経てロータブレードを出ることができて、ロータの回転ブレードを加速するかまたは減速して、所望の量の揚力を生成する。前進飛行の間、推力ダイバータが作動して、空気流の相当量が推力ダイバータ(すなわち、ロータシャフトに変更されずに)の直接後方に出ることを可能にすることができ、そして、航空機の速度を上げる。特に、前進飛行の間、揚力のために必要とされるロータ電力はより少なく、エンジン推力の大部分を前方への推進のために利用することができる。
この概念を例示するために、本開示と整合した航空機推進システムの1つの実施例を表す図65Aおよび65Bを参照すると、1つ以上の胴体搭載のエンジンからの空気流の全部または一部は、一対の逆回転ロータブレード中の配管に向けられる。このようなシステムは、本明細書において、反動駆動システムと呼んでもよい。図65Aおよび65Bの実施形態において、エンジン5は、航空機胴体4に埋め込まれるかまたは外部に取り付けることができる。いずれの場合でも、推力ダイバータ117は、エンジン5の下流に、そして、ダイバータマニホールド118の中に配置することができる。概して、推力ダイバータ117は、エンジン5によって生成される空気流をリダイレクトするように構成されている。推力ダイバータ117の位置は、ロータブレード3に方向を定められて揚力を作り出し、および/または、ダイバータ117を過ぎて方向を定められて推進力を与える、エンジン5によって生成される空気流の相対量に影響を与えることができる。ロータブレード3に、または、それを過ぎて方向を定められる空気流の相対量は、垂直揚力生成、前進速度またはそれらの組み合わせを含む航空機の飛行特性に、直接影響を与えることができる。
このような実施形態では、胴体の中の空気流配管29は、空気がロータシャフト1に進路変更され得るように構成されている。ロータシャフト1に入る空気流は、プレナム14に送られて、それからプレナム14によってロータブレード3の中の配管に分配される。実施形態において、プレナム14はこのような空気流を均一に分配するように構成されている。しかしながら、このような構成が必須というわけではなく、プレナム14は個々のロータブレードへの空気流の分配のよりきめ細かい制御を可能にするために個々に制御可能でもよい。ロータブレード3に入る空気流は、先端の近くのロータブレード3を出ることができ、上述のように推力を発生させてロータブレード3を回転させる。航空機が垂直飛行に携わるときには、システムは図65(A)に示すように構成することができて、エンジン5からの大量の空気流は、ロータブレード3に向けられて垂直揚力を生成する。航空機が前進飛行に移行するときには、推力ダイバータ117を作動させて、ロータブレード3に方向を定められる空気流の量を減少させて、図65(B)の実施例に示すように、航空機の後方に方向を定められる空気流の量を増加させることができる。言い換えると、航空機が前進飛行へ移行する際、ロータブレード3向けられる空気流の量が減少するにつれて、後方に向かう空気流の量は増加し得る。このような場合には、ロータブレード3に向かう空気流の量を(推力ダイバータ117の作動によって)調整して、航空機の揚力、安定性および操縦性を維持することができる。
図66は、本開示と整合した航空機の別の実施形態を例示する。図65Aおよび65Bの航空機と同様で、図66の航空機は、エンジンから空気流を利用して、推力支持構造物(および、したがって、1つ以上のロータブレード)を回転させる。例えば、図66の実施形態で、静止している(すなわち回転していない)ロータシャフト1は、近位端で1つ以上のエンジン5に連結されて、空気流を受けるための1つ以上のチャネル(シャフトダクト)を含む。クラッチ6(例えば、封止クラッチ)は、その遠位端の近くで、ロータシャフト1を連結する。外側シャフト80は、ロータシャフト1周辺に配置され、クラッチ6とロータシャフト1の近位端の間に位置する。
係合状態において、クラッチ6は外側シャフト80に連結されるが、分離状態では、クラッチ6は外側シャフト80から切り離される。さらに示すように、推力支持構造物7は、クラッチ6を介してロータシャフト1に連結されている。ロータシャフト1と同様に、本実施形態における推力支持構造物7は、空気流を受けるための少なくとも1つのチャネル(推力ダクト)を含む。加えて、推力支持構造物は、クラッチ6および/またはロータシャフト1の上方への伸張部に対してある角度(例えば、垂直な角度)で空気流の方向を定めるための少なくとも1つの出口(推力出口、ラベル表示無し)を含む。クラッチ6は、外側シャフト80を取り外し可能に係合する(および、分離する)ことができる、限定するものではないが、図19および20に関連して上で図と共に説明されているるクラッチなどの、いかなる適切なクラッチであってもよい。勿論、他のクラッチのタイプおよび構造も用いることができる。
理解を容易にするために、図66の航空機の動作をここで説明するが、クラッチ6は、図19および20に関連して上で図と共に説明したクラッチと同じであるか類似の構造を備えている。このような例では、エンジン5の動作は、ロータシャフト1の中の入口開口部に方向を定められた空気流(矢印によって示す)を生成する。入口開口部を通過している空気流は、ロータシャフト1の1つ以上のロータダクト内に流入してその遠位端へ向かう。ロータシャフト1の遠位端に近接して、少なくとも空気流の一部は、ロータダクトから推力支持構造物7の中の1つ以上の入口開口部に流れる。例示された実施形態において、推力支持構造物7は少なくとも2つの入口開口部を含み、それぞれがその反対側の中の対応する推力チャネルに通じている。
入口開口部を通過している空気流は、対応する推力チャネル内に流入して推力支持構造物7の両側の遠位端に向かう。推力チャネルの中の空気流は、示すように、1つ以上の出口開口部を経て最終的に推力支持構造物7を出る。例示の実施形態において、推力支持構造物7はその2つの遠位端のそれぞれに単一の出口開口部を含むが、いかなる適切な数(例えば、2、3、4、5、10など)の出口開口部も使うことができて、このような開口部が推力支持構造物7に沿ったいかなる適切な位置または位置の組合せにも置くことができることを理解すべきである。さらに、推力支持構造物7は、2つの遠位端に限られておらず、いかなる適切な数(例えば、3、4、5、10など)の遠位端も含むことができる。
いずれの場合も、出口開口部は、それが所望の出口角で推力支持構造物7を出るように空気流の方向を定めるように構成することができる。実施形態において、出口開口部は、出口角がクラッチ6および/またはロータシャフト1の上方への突出部分に対して垂直であるか実質的に垂直なように空気流の方向を定めるように構成されている。あるいは、または、加えて、実施形態におて、出口開口部は、クラッチ6および/またはロータシャフト1の上方への伸張位置に対して、空気流出口が0度を超えて180度までの範囲の角度、例えば0を超えて120度まで、または0度を超えて90度までの範囲の角度でさえ、推力支持構造物7を出るように、構成されている。実施形態において、出口角は固定することができるが、他の実施形態では、出口角は可変的でもよい。後者の例では、出口開口部は、図51、56、62、63に関連して前に説明したように、空気流が望ましい角度で推力支持構造物7を出るように移動させることができる関節動作式ノズルの形であるかまたはそれらを含むことができる。
いずれの場合でも、少なくとも1つの出口開口部を通る空気流は、図66の曲がった矢印で示すように、推力支持構造物7を回転させる。推力支持構造物7の回転によって生成されるトルクはクラッチ6に伝えられて、クラッチ6を外側シャフト80に係合させる。例えば、クラッチ6に与えられるトルクは、クラッチ可動ベアリング52が、クラッチ外側ケースの傾斜に沿って、クラッチ可動ベアリング52が傾斜の表面およびクラッチ内側レース114(前の実施形態の文脈における内側レース114のロータシャフト1との係合と同様に外側シャフト80に連結されている −図19及び20を参照)の表面に係合するまで、登らせることができる。クラッチ6がそのように係合するときに、推力支持構造物7の回転によって与えられるトルクは、外側シャフト80にクラッチ6を介して(または、より詳しくは、内側レース114を介して)伝えられて、図66に示すように外側シャフト80を回転させる。外側シャフト80の回転が次にロータブレード3の回転を引き起こす。他の実施形態に関連して上記のとおり、支持ベアリング2は、胴体4からロータブレード3および外側シャフト80の回転によって生成されるトルクを分離するように機能する。
クラッチ6(または、より詳しくは外側ケース58)の回転運動量が存在しないか、または減少していると、クラッチ外側ケース58は外側シャフト80に対するその関係において減速し始める。クラッチ可動ベアリング52は、それらの運動量および遠心力のため、クラッチ内側レース114(繰り返すが、外側シャフト80に取り付けられている)から遠ざかりそれの把持を緩め、したがって外側シャフト80をクラッチ外側ケース58から切り離して、外側シャフト80がラッチ6に関して自由に回転することを可能にする。また、外側シャフト80の速度がクラッチ6の回転速度より大きいときに、クラッチ6は外側シャフト80から分離される。クラッチ6の分離状態によって、外側シャフト80が自由に回転することができ、推力支持構造物7および動力システムからのいかなる誘導抗力もなく自動回転することができる。また、自動回転の間、外側シャフト80の速度がクラッチ6の回転速度以下であるいかなる時も、動力システムの保存された慣性は、外側シャフト80へ伝達される。その状態において、動力システム慣性の伝達は、航空機の自動回転のために必要とされる安全な角度まで総体的な傾斜を下げるためにより多くの時間を提供することができる。
以下の実施例は、本開示の追加の非限定的な実施形態である。
実施例1:本実施例によれば、胴体と、前記胴体に連結された支持ベアリングと、支持ベアリングによって胴体に取り付けられたロータシャフトであって、前記ロータシャフトは前記ロータシャフトを通って伸びている第1軸のまわりを回転することができ、前記支持ベアリングは常に前記ロータシャフトが前記第1軸のまわりを前記胴体に対して回転することを可能にする、ロータシャフトと、前記ロータシャフトに連結されたロータブレードであって、前記ロータシャフトの回転は前記ロータブレードに第1軸のまわりを回転させる、ロータブレードと、前記ロータシャフトに連結された推力支持構造物と、前記胴体または前記推力支持構造物に連結されたエンジンとを含み、作動中に、前記エンジンは前記推力支持構造物に前記第1軸のまわりを回転させ、前記推力支持構造物の回転は前記ロータシャフトに前記第1軸のまわりを回転させ、それは次に前記ロータブレードに前記第1軸のまわりを回転させ、前記支持ベアリングは前記胴体を少なくとも前記ロータブレードの回転によって生成したトルクから分離する、航空機が提供される。
実施例2:本実施例は、実施例1のいずれかまたはすべての前記機能を含み、さらに前記ロータシャフトに連結されたクラッチまたは前記ロータシャフトに連結されたロータハブを含み、前記クラッチには係合状態および分離状態がある。
実施例3:本実施例は、実施例2のいずれかまたはすべての前記機能を含み、作動中に、前記エンジンは前記推力支持構造物に前記ロータシャフトの第2回転速度以上である第1回転速度で前記第1軸のまわりを回転させ、前記クラッチに前記係合状態に入らせて前記ロータシャフトを把持させる。
実施例4:本実施例は、実施例3のいずれかまたはすべての前記機能を含み、前記第1回転速度が前記第2回転速度未満であるときに、前記クラッチは前記分離状態に入るかまたは前記分離状態である。
実施例5:本実施例は、実施例2のいずれかまたはすべての前記機能を含み、前記クラッチがクラッチ外側ケース、前記ロータシャフトに連結されたクラッチ内側レースおよびクラッチ可動ベアリングを含み、前記クラッチ外側ケースが傾斜および空洞を含み、前記係合状態において、前記クラッチ可動ベアリングは、前記傾斜および前記クラッチ内側レースの両方の間に配置されて接触し、それにより、前記クラッチ外側ケースと前記クラッチ内側レースを係合し、前記分離状態において、前記クラッチ可動ベアリングは、前記空洞内に配置されており、前記クラッチ外側ケースと接触しているだけである。
実施例6:本実施例は、実施例2のいずれかまたはすべての前記機能を含み、前記クラッチが前記ロータシャフトに連結されている。
実施例7:本実施例は、実施例2のいずれかまたはすべての前記機能を含み、前記クラッチが前記ロータハブに連結されている。
実施例8:本実施例は、実施例1から7のいずれかの、いずれかまたはすべての前記機能を含み、前記支持ベアリングが、内側および外側レースケージを有するベアリングハウジングと内側および外側レースケージの間の少なくとも1つのベアリングとを含み、前記ロータシャフトが、前記胴体の中に、そして、前記支持ベアリングの中に伸びている。
実施例9:本実施例は、実施例8のいずれかまたはすべての前記機能を含み、さらにベアリング支持構造を含み、前記支持ベアリングは前記ベアリング支持構造に連結されており、前記ベアリング支持構造は前記胴体に連結されている。
実施例10:本実施例は、実施例9のいずれかまたはすべての前記機能を含み、前記ロータシャフトが前記支持ベアリングおよび前記ベアリング支持構造のみによって前記胴体に連結されている。
実施例11:本実施例は、実施例1から10のいずれかの、いずれかまたはすべての前記機能を含み、前記エンジンが前記推力支持構造物に連結されている。
実施例12:本実施例は、実施例11のいずれかまたはすべての前記機能を含み、前記推力支持構造物が、前記ロータシャフトに連結された近位部分及び前記エンジンに連結された遠位部分を含む。
実施例13:本実施例は、実施例1から12のいずれか1つの、いずれかまたはすべての機能を含み、前記エンジンによって生成される空気流の形(気流状、気流の形態)の推力は、ロータブレードの上に、ロータブレードの下に、または、ロータブレードの上下に水平に伸びている推力線に全般的に沿って方向を定められる。
実施例14:本実施例は、実施例13のいずれかまたはすべての前記機能を含み、前記空気流が前記ロータブレードの上の渦の前記形成を阻害する。
実施例15:本実施例は、実施例1から14のいずれか1つの、いずれかまたはすべての前記機能を含み、さらに方位制御装置を含む。
実施例16:本実施例は、実施例15のいずれかまたはすべての前記機能を含み、前記方位制御装置がモータシャフトを含む電動可逆モータを含み、前記モータシャフトは前記ロータシャフトである。
実施例17:本実施例は、実施例16のいずれかまたはすべての前記機能を含み、前記方位制御装置がロータおよびステータを含み、前記ステータが通電されると、力が前記回転マグネットに印加され、それは次に、前記胴体を前記第1軸のまわりに回転させる力を前記胴体に与える。
実施例18:本実施例は、実施例17のいずれかまたはすべての前記機能を含み、前記方位制御装置が前記ロータシャフトに連結されているスペーサを含み、前記回転マグネットが前記スペーサに連結されており、前記ステータが前記胴体に連結されている。
実施例19:本実施例は、実施例15のいずれかまたはすべての前記機能を含み、前記方位制御装置がラダーを含む。
実施例20:本実施例は、実施例16のいずれかまたはすべての前記機能を含み、前記航空機にはテールが無い。
実施例21:本実施例は、実施例1から20のいずれか1つの、いずれかまたはすべての前記機能を含み、前記ロータシャフトが前記胴体に対して第1位置と第2位置の間で移動可能である。
実施例22:本実施例は、実施例21のいずれかまたはすべての前記機能を含み、前記第1位置の前記ロータシャフトと前記第2位置の前記ロータシャフトの間の角度が定められ、前記角度は約90度以下である。
実施例23:本実施例は、実施例21のいずれかまたはすべての前記機能を含み、前記胴体に連結されたピボットをさらに含み、前記ロータシャフトが前記ピボットに連結されており、前記ピボットが第2軸のまわりを回転可能であり、前記第2軸のまわりの前記ピボットの回転は、前記ロータシャフトに前記第1位置と前記第2位置の間で移動させる。
実施例24:本実施例は、実施例23のいずれかまたはすべての前記機能を含み、角度は、前記ピボットに対して、前記第1位置の前記ロータシャフトおよび前記第2位置の前記ロータシャフトによって定められ、前記角度は約90度以下である。
実施例25:本実施例は、実施例21のいずれかまたはすべての前記機能を含み、さらに、前記胴体の前記外側に連結されたフレームレールガイドと、前記フレームレールガイドに連結されたロータシステムカートハウジングとを含み、前記ロータシャフトが前記ロータシステムカートハウジングに連結されており、前記ロータシステムカートハウジングは、前記ロータシャフトに前記第1位置から前記第2位置へ移動するようにさせるために、前記フレームレールガイドに沿って移動するように構成されており、逆もまた同じである。
実施例26:本実施例は、実施例2のいずれかまたはすべての前記機能を含み、前記胴体が内部体積を定めて、少なくとも1つの胴体構造部材を含み、前記航空機が、前記支持ベアリングと前記胴体構造部材の間に減衰要素をさらに含む。
実施例27:本実施例は、実施例26のいずれかまたはすべての前記機能を含み、前記減衰要素が能動的減衰要素または受動的減衰要素である。
実施例28:本実施例は、実施例27のいずれかまたはすべての前記機能を含み、前記減衰要素が受動的減衰要素であり、前記受動的減衰要素はガス緩衝器、液体緩衝器、機械的緩衝器またはそれらの組み合わせである。
実施例29:本実施例は、実施例28のいずれかまたはすべての前記機能を含み、前記減衰要素がガスストラット、液体ストラット、減衰ばね、弾性物質またはそれらの組み合わせを含む。
実施例30:本実施例は、実施例27のいずれかまたはすべての前記機能を含み、前記減衰要素が能動的減衰要素である。
実施例31:本実施例は、実施例30のいずれかまたはすべての前記機能を含み、前記能動的減衰要素が、前記ロータブレード、前記推力支持構造物またはそれらの組み合わせによって生じる調和振動数または振動と一致するかまたは相殺するように構成されている。
実施例32:本実施例は、実施例1から31のいずれか1つの、いずれかまたはすべての前記機能を含み、前記ロータブレードが固定長または可変長を有する。
実施例33:本実施例は、実施例32のいずれかまたはすべての前記機能を含み、前記ロータブレードが可変長を有する。
実施例34:本実施例は、実施例32のいずれかまたはすべての前記機能を含み、モータを含むブレードグリップをさらに含み、前記ブレードグリップは前記ロータブレードに連結されており、前記モータの動作は前記ロータブレードの長さを変化させる。
実施例35:本実施例は、実施例1から34のいずれか1つの、いずれかまたはすべての前記機能を含み、前記推力支持構造物が少なくとも1つのダクトおよび開口部を含む遠位端を含み、前記少なくとも1つのダクトは前記エンジンによって生成される推力空気流を受けて、前記空気流を前記開口部に伝達するようになっている。
実施例36:本実施例は、実施例35のいずれかまたはすべての前記機能を含み、前記推力空気流は、第1温度T1を有し、前記エンジンは第2温度T2を有するコンプレッサブリード空気流(圧縮されたブリード空気流)を作り出すようにさらに構成されており、T2はT1未満であり、前記少なくとも1つのダクトは前記コンプレッサブリード空気流を受けるようにさらに構成されており、その結果作動中に、前記コンプレッサブリード空気流は前記推力空気流に注入されて温度T3を有する混合空気流を作り出し、T2はT1未満である。
実施例37:本実施例は、実施例35のいずれかまたはすべての前記機能を含み、前記推力空気流は、第1温度T1を有し、前記エンジンは第2温度T2を有するコンプレッサブリード空気流を作り出すようにさらに構成されており、T2はT1未満であり、前記少なくとも1つのダクトは前記コンプレッサブリード空気流を受けるようにさらに構成されており、その結果作動中に、前記コンプレッサブリード空気流は、前記推力空気流の周りに方向を定められる。
実施例38:本実施例は、実施例1から37のいずれか1つの、いずれかまたはすべての前記機能を含み、前記推力支持構造物がエアフォイル形状を有する。
実施例39:本実施例は、実施例1から38のいずれか1つの、いずれかまたはすべての前記機能を含み、前記推力支持構造物の周りに配置されたエアフォイル形状の整流板をさらに含む。
実施例40:本実施例は、実施例39のいずれかまたはすべての前記機能を含み、前記エアフォイル形状の整流板に連結された整流板位置決めモータをさらに含み、前記整流板位置決めモータは前記エアフォイル形状の整流板の方向を変えるように動作可能である。
実施例41:本実施例は、実施例1のいずれかまたはすべての前記機能を含み、前記推力支持構造物が、第1開口部を含む遠位端および少なくとも1つのダクトを含み、前記エンジンが前記推力支持構造物に連結されるかまたは組み込まれており、作動中に、前記エンジンによって生成された空気流は、前記少なくとも1つのダクトを通って、そして、前記推力支持構造物の前記第1開口部を通って導かれる。
実施例42:本実施例は、実施例41のいずれかまたはすべての前記機能を含み、前記第1開口部と流体連通しているノズルをさらに含み、前記ノズルは第1開口部を通過している空気流を受けてリダイレクトするように構成されている。
実施例43:本実施例は、実施例42のいずれかまたはすべての前記機能を含み、前記ノズルが出口を含み、前記第1開口部を通過している空気流は前記ノズルを通って、そして、前記出口を通って流れ、前記ノズルは、少なくとも第1ノズル位置および第2ノズル位置の間で関節動作するように構成されており、前記第1ノズル位置の前記出口の方向は前記第2ノズル位置の前記出口の方向とは異なる。
実施例44:本実施例は、実施例43のいずれかまたはすべての前記機能を含み、前記ノズルに連結された駆動モータをさらに含み、前記駆動モータは少なくとも前記第1ノズル位置および前記第2ノズル位置の間で前記ノズルを関節動作させるように動作可能である。
実施例45:本実施例は、実施例1から44のいずれか1つの、いずれかまたはすべての前記機能を含み、前記ロータシャフトは第1シャフトおよび第2シャフトを含み、前記第1シャフトは前記第2シャフトのルーメン内に配置されており、前記推力支持構造物が、前記第1シャフトに連結されており、前記航空機は、前記第2シャフトが前記第1シャフトに連結されている係合状態と、前記第2シャフトが前記第1シャフトから切り離されている分離状態とを有するクラッチをさらに含み、作動中に、前記第1軸のまわりの前記推力支持構造物の回転が前記クラッチを前記係合状態に入らせ、それは次に前記第2シャフトおよび前記ロータブレードを第1軸のまわりで回転させる。
実施例46:本実施例は、実施例45のいずれかまたはすべての前記機能を含み、前記航空機は、前記第2シャフトに連結された第1ロータブレードおよび前記第1ロータブレードの上の前記第2シャフトに連結された第2ロータブレードを含み、前記第1および第2ロータブレードのそれぞれは前記第1軸のまわりを回転するように構成されており、作動中に、前記第1軸のまわりの前記推力支持構造物の回転は前記クラッチを前記係合状態に入らせ、それは次に前記第2シャフトならびに前記第1および2ロータブレードを前記第1軸のまわりに回転させる。
実施例47:本実施例は、実施例45のいずれかまたはすべての前記機能を含み、第3シャフトをさらに含み、前記第2シャフトが前記第3シャフトのルーメン内に配置されており、前記第3シャフトは前記胴体に連結されており回転せず、少なくとも1つの同心のベアリングが前記第2シャフトと前記第3シャフトの間に配置されており、前記第2シャフトを前記第3シャフトから分離している。
実施例48:本実施例は、実施例1から47のいずれか1つの、いずれかまたはすべての前記機能を含み、前記航空機の飛行の間水平推力を提供するためのスラスタをさらに含む。
実施例49:本実施例は、実施例48のいずれかまたはすべての前記機能を含み、前記スラスタが、前記第1軸に対して直角である第2軸のまわりを回転するように構成されている第2ロータブレードを含む。
実施例50:本実施例は、実施例45のいずれかまたはすべての前記機能を含み、前記航空機の飛行の間水平推力を提供するためのスラスタをさらに含んでいることをさらに含む。
実施例51:本実施例は、実施例50のいずれかまたはすべての前記機能を含み、前記スラスタが、前記第1軸に対して直角である第2軸のまわりを回転するように構成されている第3ロータブレードを含む。
実施例52:本実施例は、実施例1から51のいずれか1つの、いずれかまたはすべての前記機能を含み、前記推力支持構造物は前記ロータブレードの上または下の前記ロータシャフトに連結されている。
実施例53:本実施例は、実施例1から52のいずれか1つの、いずれかまたはすべての前記機能を含み、前記推力支持構造物およびロータブレードは前記ロータシャフトに連結されており、実質上同じ平面に配置されている。
実施例54:本実施例は、実施例53のいずれかまたはすべての前記機能を含み、前記ロータシャフトに連結された共通構造ハブをさらに含み、前記推力支持構造物および前記ロータブレードが前記ロータシャフトに連結されており、実質上同じ平面に配置されている。
実施例55:本実施例は、実施例54のいずれかまたはすべての前記機能を含み、前記共通構造ハブが前記ロータシャフトの遠位端に連結されており、前記ロータシャフトの近位端は前記胴体内に配置されている。
実施例56:本実施例は、実施例1から55のいずれか1つの、いずれかまたはすべての前記機能を含み、前記エンジンが前記推力支持構造物の遠位端に連結されているファンを含む。
実施例57:本実施例によれば、胴体と、ローターシャフトと、前記ローターシャフトに連結されたロータハブと、前記ロータハブに連結されたエンジンと、前記エンジンの遠位端に連結された推力支持構造物とを含む航空機が提供され、前記推力支持構造物が前記航空機のロータブレードとして機能するように構成されており、前記推力支持構造物は、近位端、遠位端および少なくとも1つのチャネルを有する配管を含み、前記少なくとも1つのチャネルは、作動中に、前記エンジンによって生成される推力が前記チャネルによって受け取られてリダイレクトされ、前記推力支持構造物を回転させるように、前記エンジンに流動的に連結されている。
実施例58:本実施例は、実施例57のいずれかまたはすべての前記機能を含み、前記航空機には前記推力支持構造物以外のロータブレードが無い。
実施例59:本実施例は、実施例57のいずれかまたはすべての前記機能を含み、前記胴体に連結された支持ベアリングをさらに含み、前記支持ベアリングは少なくとも前記推力支持構造物の回転によって生成されるトルクから前記胴体を分離する。
実施例60:本実施例によれば、胴体と、前記胴体に載置されているエンジンと、前記エンジンに連結されているダイバータマニホールドと、前記ダイバータマニホールドに配置されている推力ダイバータと、前記エンジンに連結されたロータシャフトであって、前記ダイバータマニホールドと流体連通しているシャフトダクトを含むロータシャフトとを含む、航空機が提供され、動作において、前記エンジンは前記ダイバータマニホールドに方向を定められた空気流を生成し、前記推力ダイバータが前記シャフトダクトに方向を定められている前記ダイバータマニホールドの中で前記空気流の相対量を制御するように構成されている。
実施例61:本実施例は、実施例60のいずれかまたはすべての前記機能を含み、さらに、前記ロータシャフトに連結されて前記シャフトダクトと流体連通しているプレナムと、前記プレナムに連結されたロータブレードであって、前記プレナムと流体連通しているブレードダクトを含み、さらに開口部を含んでいる、ロータブレードとを含み、前記プレナムは、前記空気流の全体または一部が前記開口部を出るように、前記ロータダクトに向けられた前記空気流の少なくとも一部を前記ブレードダクトに方向を定めるように構成されている。
実施例62:本実施例は、実施例60のいずれかまたはすべての前記機能を含み、前記エンジンが前記胴体上またはその中に配置されている。
実施例63:本実施例は、実施例61のいずれかまたはすべての前記機能を含み、前記胴体に連結された支持ベアリングをさらに含み、前記支持ベアリングは少なくとも前記ロータブレードの回転によって生成されるトルクから前記胴体を分離する。
実施例64:本実施例によれば、胴体と、エンジンと、前記胴体に連結された静止ロータシャフトであって、近位端、遠位端および前記近位端から前記遠位端まで伸びているシャフトダクトを含み、前記シャフトダクトが前記エンジンと流体連通している、静止ロータシャフトと、前記静止ロータシャフトに連結された推力支持構造物であって、前記ロータダクトと流体連通している入口開口部、出口開口部ならびに前記入口開口部および前記出口開口部と流体連通している推力ダクトを含む、推力支持構造物と、前記ロータシャフトの前記遠位端の少なくとも一部のまわりに配置された回転可能な外側シャフトと、前記静止ロータシャフトに連結されたクラッチであって、係合状態および分離状態を有するクラッチとを含む、航空機が提供され、動作において、エンジン5からの空気流は、前記ロータダクトを通って、前記入口開口部を通って、前記推力ダクトを通って、そして、前記出口開口部を通って導かれ、それにより、前記推力支持構造物を回転させ、前記推力支持構造物の回転は、前記クラッチに、それが前記外側シャフトに連結されている前記係合状態に入るようにさせて、その結果、前記推力支持構造物の回転によって生成されるトルクが前記外側シャフトに伝えられ、前記外側シャフトおよび前記ロータブレードを回転させる。
実施例65:本実施例は、実施例64のいずれかまたはすべての前記機能を含み、さらに、前記静止ロータシャフトおよび前記外側シャフトに連結された支持ベアリングを含み、前記支持ベアリングは、少なくとも前記胴体を、前記外側シャフトおよび前記ロータブレードの回転によって生成されるトルクから分離する。。
実施例66:本実施例は、実施例64のいずれかまたはすべての前記機能を含み、作動中に、前記エンジンは前記推力支持構造物に前記外側シャフトの第2回転速度以上である第1回転速度で第1軸のまわりを回転させ、前記クラッチに前記係合状態に入らせて前記外側シャフトを把持させる。
実施例67:本実施例は、実施例66のいずれかまたはすべての前記機能を含み、前記第1回転速度が前記第2回転速度未満であるときに、前記クラッチは前記分離状態に入るかまたは前記分離状態である。
実施例68:本実施例は、実施例64のいずれかまたはすべての前記機能を含み、前記クラッチがクラッチ外側ケース、前記外側シャフトに連結されたクラッチ内側レースおよびクラッチ可動ベアリングを含み、前記クラッチ外側ケースが傾斜および空洞を含み、前記係合状態において、前記クラッチ可動ベアリングは、前記傾斜および前記クラッチ内側レースの両方の間に配置されて接触し、それにより、前記クラッチ外側ケースと前記クラッチ内側レースを係合し、前記分離状態において、前記クラッチ可動ベアリングは、前記空洞内に配置されており、前記クラッチ外側ケースと接触しているだけである。
実施例69:本実施例は、実施例1から67のいずれか1つの、いずれかまたはすべての前記機能を含み、前記航空機は逆トルク機構を含まない。
本開示の原理を本明細書において説明してきているが、この説明が例証として行われているだけであり、請求されている本発明の範囲に関して限定するものではないことは、当業者によってよく理解されるはずである。本明細書において開示される具体的な実施形態を参照して説明されている機能および態様は、本明細書において説明されている様々な他の実施形態との組合せおよび/または用途の余地がある。このような他の実施形態に対するこのような説明されている機能および態様のこのような組合せおよび/または用途は、本明細書において意図されている。修正および他の実施形態は本明細書において意図されており、本開示の範囲内である。