本開示は、複数の別個の時間間隔を有するガイド下クリーニングセッションの間の口腔クリーニング装置の位置特定のための本発明の方法およびシステムに関する。ガイド下クリーニングセッションを提供するように構成されたシステムに適用されるとき、本発明の方法およびシステムは、装置またはシステムが、クリーニングセッション中に口腔クリーニング装置を追跡し、クリーニングセッションに関してユーザにフィードバックを提供することを可能にする。システムは、ユーザに装置を新しい位置に移動させるよう促す触覚通知によって分離された複数の時間間隔を含むガイド下クリーニングセッションの間に、口腔クリーニング装置の位置を追跡する。従って、システムは、1つまたは複数のセンサからの動きデータ、ガイド下クリーニングセッションのペーシングおよび時間間隔、ならびにユーザ行動モデルを利用して、クリーニングセッションの複数の時間間隔のうちの1つまたは複数の間の口腔クリーニング装置の位置を推定する。システムは、位置特定情報を使用して、クリーニングセッションを評価し、オプションで、ユーザにフィードバックを提供することができる。
概して、一態様では、複数の時間間隔を含むガイド下クリーニングセッションの間に口腔ケア装置の位置(location)を推定する方法が提供される。本方法は、(i)センサ、ガイダンス発生器、フィードバックコンポーネント、およびコントローラを有する口腔クリーニング装置を設けるステップと;(ii)ガイダンス発生器によって、ユーザにガイド下クリーニングセッションを提供するステップであって、ガイド下クリーニングセッションは、口内の第1の位置から口内の第2の位置に切り替えるようにキュー(cue)によって分離される複数の時間間隔を含み、キューは、フィードバックコンポーネントによって生成される、ステップと;(iii)複数の時間間隔のうちの1つの間に、口腔クリーニング装置の場所(position)または動きを示すセンサからのセンサデータを生成するステップと;(iv)生成されたセンサデータに基づいて、コントローラによって、複数の時間間隔のうちの1つの間の口腔ケア装置の位置を推定するステップと;(v)ユーザのクリーニング挙動を予測するためのモデルを生成するステップと;(vi)口腔ケア装置の推定された位置およびユーザのクリーニング挙動のモデルに基づいて、複数の時間間隔のうちの1つの間の口腔ケア装置の位置を決定するステップと;を含む。
一実施形態によれば、本方法は、クリーニングセッションに関してユーザにフィードバックを提供するステップをさらに含む。
一実施形態によれば、推定するステップは、ユーザの口内の複数の位置のそれぞれについて、複数の時間間隔のうちの1つの間に口腔ケア装置が位置内に位置していたという確率を推定することを含む。一実施形態によれば、推定するステップは、統計モデルまたはルールのセット(set of rules)を含む。
一実施形態によれば、ガイド下クリーニングセッションは、クリーニングセッションを開始するキューと、クリーニングセッションを終了するキューとをさらに含む。一実施形態によれば、ガイド下クリーニングセッションは、キューのみを含む。一実施形態によれば、キューは、視覚キュー、聴覚キュー、または触覚キューである。
一態様によれば、複数の時間間隔を含むガイド下クリーニングセッションの間に装置の位置を推定するように構成されたクリーニング装置が提供される。口腔クリーニング装置は:ガイド下クリーニングセッションをユーザに提供するように構成されたガイダンス発生器であって、ガイド下クリーニングセッションは、口内の第1の位置から口内の第2の位置に切り替えるようにキューによって分離される複数の時間間隔を含む、ガイダンス発生器と;複数の時間間隔のうちの1つの間にセンサデータを生成するように構成されたセンサであって、センサデータはクリーニング装置の場所又は動きを示す、センサと;キューを生成するように構成されたフィードバックコンポーネントと;コントローラであって:(i)生成されたセンサデータに基づいて、複数の時間間隔のうちの1つの間に口腔ケア装置の位置を推定し;(ii)ユーザのクリーニング挙動を予測するためのモデルを生成し;(iii)口腔ケア装置の推定された位置及びユーザのクリーニング挙動のモデルに基づいて、複数の時間間隔のうちの1つの間に口腔ケア装置の位置を決定する;ように構成されたコントローラと;を有する。
一態様によれば、ガイド下クリーニングセッションのユーザの追従(compliance)を判定するように構成されたクリーニング装置が提供される。クリーニング装置は:(i)口内の第1の位置から口内の第2の位置に切り替えるようにキューによって分離される複数の時間間隔を含むガイド下クリーニングセッションを生成するように構成されたガイダンス発生モジュールと;(ii)複数の時間間隔のうちの1つの間にセンサデータをセンサから受信するように構成されたセンサモジュールであって、センサデータはクリーニング装置の場所または動きを示す、センサモジュールと;(iii)ガイド下クリーニングセッションおよびセンサデータから1つまたは複数の特徴を抽出するように構成された特徴抽出モジュールと;(iv)ユーザのクリーニング挙動を予測するためにモデルを生成するように構成された挙動モデルモジュールと;(v)口腔ケア装置の推定された位置およびユーザのクリーニング挙動のモデルに基づいて、複数の時間間隔のうちの1つの間に口腔ケア装置の位置を決定するように構成された位置推定モジュールと;を含む。
一実施形態によれば、クリーニング装置は、1つまたは複数の記憶されたガイド下クリーニングセッションを含むガイダンスデータベースをさらに含む。
本開示の目的のために本明細書で使用されるとき、用語「コントローラ」は、概して、ストリームプローブ(stream probe)装置、システム、または方法の動作に関連する様々な装置を記述するために使用される。コントローラは、本明細書で説明される様々な機能を実行するために、多数の方法(例えば、専用ハードウェアによるなど)で実装することができる。「プロセッサ」は、本明細書で説明した種々の機能を実行するためにソフトウェア(例えば、マイクロコード)を用いてプログラムされることができる1つまたは複数のマイクロプロセッサを使用するコントローラの一例である。コントローラは、プロセッサを使用してまたは使用しないで実現することができ、また、ある機能を実行するための専用ハードウェアと、他の機能を実行するためのプロセッサ(例えば、1つまたは複数のプログラムされたマイクロプロセッサおよび関連回路)との組み合わせとして実現することもできる。本開示の種々の実施形態で使用することができるコントローラ構成要素の例は、従来のマイクロプロセッサ、特定用途向け集積回路(ASICs)、およびフィールドプログラマブルゲートアレイ(FPGAs)を含むが、これらに限定されない。
種々の実装において、プロセッサまたはコントローラは、1つまたは複数の記憶媒体(例えば、揮発性および不揮発性のコンピュータメモリなど、本明細書では「メモリ」と一般に呼ぶ)と関連付けられてもよい。幾つかの実装形態では、記憶媒体は、1つまたは複数のプロセッサおよび/またはコントローラ上で実行されるとき、本明細書で説明される機能の少なくとも一部を実行する1つまたは複数のプログラムで符号化されてもよい。種々の記憶媒体は、プロセッサまたはコントローラ内に固定されてもよく、またはそこに記憶された1つまたは複数のプログラムが、本明細書で説明される本開示の種々の態様を実施するために、プロセッサまたはコントローラ内にロードされることができるように、搬送可能であってもよい。用語「プログラム」または「コンピュータプログラム」は、本明細書において、1つまたは複数のプロセッサまたはコントローラをプログラムするために使用することができる任意のタイプのコンピュータコード(例えば、ソフトウェアまたはマイクロコード)を指す総称的な意味で使用される。
本明細書で使用される「ユーザインタフェース」という用語は、人間のユーザまたはオペレータと、ユーザと装置との間の通信を可能にする1つまたは複数の装置との間のインタフェースを指す。本開示の種々の実施に用いることができるユーザインタフェースの例は、スイッチ、ポテンショメータ、ボタン、ダイヤル、スライダ、トラックボール、ディスプレイスクリーン、種々のタイプのグラフィカルユーザインタフェース(GUIs)、タッチスクリーン、マイクロホン、および何らかの形式の人為的刺激を受け、それに応答して信号を発生し得る他のタイプのセンサを含むが、これらに限定されない。
上述の概念および以下により詳細に議論される追加の概念(このような概念が相互に矛盾しないことを条件とする)のすべての組み合わせは、本明細書に開示される発明の主題の一部であると考えられる。特に、本開示の末尾にある請求項に記載された主題のすべての組み合わせは、本明細書に開示される発明の主題の一部であることが意図される。
本発明のこれらの態様および他の態様は、以下に記載される実施形態(複数可)から明らかであり、それらを参照して説明される。
本開示は、複数の別個の時間間隔を有するガイド下クリーニングセッションの間に口腔クリーニング装置を位置特定するための方法および装置の種々の実施形態を記載する。より一般的には、出願人は、クリーニングセッションを評価し、ユーザにフィードバックを提供するように構成されたシステムを提供することが有益であることを認識し、理解していた。従って、本明細書に記載されるかまたは他の方法で想定される方法は、触覚通知によって分離された複数の別個の時間間隔を含むガイド下クリーニングセッションをユーザに提供し、1つまたは複数のセンサからセンサデータを取得し、複数の別個の時間間隔の各々の間に口腔クリーニング装置の位置を推定するように構成された口腔クリーニング装置を提供する。一実施形態によれば、ガイド下クリーニングセッションは、触覚通知によって分離された複数の別個の時間間隔を含むが、位置特定指示を含まないため、ユーザは、口のどの部分をどの順序でクリーニングするかを自由に選択できる。一実施形態によれば、口腔クリーニング装置は、推定された位置データに基づいてクリーニングセッションを評価し、オプションで、クリーニングセッションに関してユーザにフィードバックを提供するためのフィードバック機構を有する。
本明細書で開示または他の方法で想定される実施形態および実装形態は、歯ブラシ、Philips AirFloss(登録商標)などのフロッシング(flossing)装置、口腔洗浄器(oral irrigator)、または任意の他の口腔装置を含むが、これらに限定されない、任意の口腔装置と共に利用することができる。本明細書の実施形態および実装形態の利用の1つの特定の目標は、例えば、Philips Sonicare(登録商標)歯ブラシ(Koninklijke Philips Electronics, N.V.製)などの口腔クリーニング装置を用いて、クリーニング情報およびフィードバックを提供することである。しかし、本開示は、歯ブラシに限定されず、従って、本明細書の開示および本明細書に開示される実施形態は、任意の口腔ケア装置を包含することができる。
図1を参照すると、一実施形態では、ボディ部分12と、ボディ部分に取り付けられた装置ヘッド部材14とを含む口腔クリーニング装置10が提供される。装置ヘッド部材14は、ボディ部分から離れたその端部にヘッド16を含む。ヘッド16は、クリーニングに使用される面18を含む。
一実施形態によれば、装置ヘッド部材14、ヘッド16、および/または面18は、ボディ部分12に対して動くことができるように取り付けられている。動きは、とりわけ、振動または回転を含む種々の異なる動きのいずれであることができる。一実施形態によれば、装置ヘッド部材14は、ボディ部分12に対して振動できるように本体に取り付けられか、または別の例として、ヘッド16は、ボディ部分12に対して振動できるように装置ヘッド部材14に取り付けられる。装置ヘッド部材14は、ボディ部分12に固定して取り付けられることができ、あるいは、代替的に、装置の構成要素が摩耗して交換が必要になったときに装置ヘッド部材14が新しいものと交換できるように取り外し可能に取り付けられてもよい。
一実施形態によれば、ボディ部分12は、動きを発生させるドライブトレーン22と、発生した動きを装置ヘッド部材14に伝える伝動コンポーネント24とを含む。例えば、ドライブトレーン22は、伝動コンポーネント24の動きを発生させるモータまたは電磁石を有することができ、この動きは、その後、装置ヘッド部材14に伝えられる。ドライブトレーン22は、他の構成要素の中で特に、電源、発振器、および1つまたは複数の電磁石などの構成要素を含むことができる。この実施形態では、電源は、例えば、口腔クリーニング装置10が使用されていないときに置かれる充電ホルダ内で電気的に充電されることができる、図示しない1つまたは複数の再充電可能バッテリを含む。
本願明細書の図のいくつかに示された実施形態では、口腔クリーニング装置10は電動歯ブラシであるが、代替実施形態では、口腔クリーニング装置は手動歯ブラシ(図示せず)であり得ることが理解されるであろう。このような構成では、手動歯ブラシは電気部品を有するが、ブラシヘッドは電気部品によって機械的に作動されない。加えて、口腔クリーニング装置10は、フロッシング装置、口腔洗浄器、または任意の他の口腔ケア装置などのいくつかの口腔クリーニング装置のうちの任意の1つであることができる。
ボディ部分12は、動き発生器22を作動および作動停止させるためのユーザ入力部26をさらに備える。ユーザ入力部26は、ユーザが口腔クリーニング装置10を操作すること、例えば、口腔クリーニング装置10をオン/オフにすることを可能にする。ユーザ入力部26は、例えば、ボタン、タッチスクリーン、またはスイッチであり得る。
口腔クリーニング装置10は、1つまたは複数のセンサ28を含む。センサ28は、図1にボディ部分12内に示されているが、例えば装置ヘッド部材14またはヘッド16内を含む、装置内の任意のどこにでも配置され得る。センサ28は、例えば、6軸または9軸空間センサシステムを含むことができ、口腔クリーニング装置の運動の軸に対して読取り値(readings)を提供し、装置の方向(orientation)および変位を特徴付けるための、加速度計、ジャイロスコープ、および/または磁力計のうちの1つまたは複数を含むことができる。例えば、センサ28は、例えば、3軸ジャイロスコープおよび3軸加速度計を使用して、6軸の相対運動(3軸並進および3軸回転)の読取り値を提供するように構成されることができる。他の多くの構成が可能である。圧力センサ(例えば、ホール効果センサ)および、所定範囲の波長の電磁波形を測定するセンサ、容量性センサ、カメラ、フォトセル、可視光センサ、近赤外センサ、電波センサ、および/または、1つまたは複数の他のタイプのセンサなどの他のタイプのセンサを含むが、これらに限定されない、他のセンサが、単独でまたはこれらのセンサと組み合わせて利用され得る。本明細書に記載または他の方法で想定されるように、多くの異なるタイプのセンサが利用されることができる。一実施形態によれば、これらの追加のセンサは、ユーザの身体部分、固定点、および/または、1つまたは複数の他の位置に対する装置の位置に関する補完的な情報を提供する。一実施形態によれば、センサ28は、口腔クリーニング装置10内の所定の位置および方向に配置され、ブラシヘッドは、センサ28に対する固定された空間的相対配置にある。従って、ブラシヘッドの方向および位置は、センサ28の既知の方向および位置に基づいて容易に決定することができる。
一実施形態によれば、センサ28は、口腔クリーニング装置10の加速度および角度方向(angular orientation)を示す情報を生成するように構成される。例えば、センサシステムは、6軸または9軸空間センサシステムとして一緒に機能する2つ以上のセンサ28を含み得る。別の実施形態によれば、統合された9軸空間センサが、口腔クリーニング装置10においてスペース節約を提供することができる。
第1のセンサ28によって生成された情報は、コントローラ30に提供される。コントローラ30は、1つまたは複数のモジュールから形成されてもよく、ユーザ入力部26を介して得られる入力などの入力に応答して口腔クリーニング装置10を動作させるように構成される。一実施形態によれば、センサ28は、コントローラ30と一体である。コントローラ30は、例えば、少なくともプロセッサ32、メモリ34、および接続モジュール38を有することができる。プロセッサ32は、マイクロコントローラ、複数のマイクロコントローラ、回路、単一のプロセッサ、または複数のプロセッサを含むが、これらに限定されない、任意の適切な形態をとり得る。メモリ34は、不揮発性メモリおよび/またはRAMを含む任意の適切な形態をとることができる。不揮発性メモリは、リードオンリメモリ(ROM)、ハードディスクドライブ(HDD)、またはソリッドステートドライブ(SSD)を含み得る。メモリは、とりわけ、オペレーティングシステムを記憶することができる。RAMはデータの一時記憶のためにプロセッサによって使用される。一実施形態によれば、オペレーティングシステムは、コントローラ30によって実行されるとき、口腔クリーニング装置10のハードウェア構成要素の動作を制御するコードを含み得る。一実施形態によれば、接続モジュール36は、収集されたセンサデータを送信し、有線あるいは、Wi−Fi、Bluetooth(登録商標)、近距離無線通信、および/またはセルラモジュールを含むがこれらに限定されない、無線信号を送信することができる任意のモジュール、装置、または手段であることができる。
一実施形態によれば、口腔クリーニング装置10は、ユーザに情報を提供するように構成されたフィードバックコンポーネント48を含む。例えば、フィードバックコンポーネントは、現在のクリーニング位置から新しいクリーニング位置に切り替えるべきであるという1つまたは複数の視覚キューをユーザに提供する視覚フィードバックコンポーネント48であり得る。別の例として、フィードバックコンポーネントは、現在のクリーニング位置から新しいクリーニング位置に切り替えるべきであるという1つまたは複数の聴覚キューをユーザに提供する聴覚フィードバックコンポーネント48であり得る。別の例として、フィードバックコンポーネントは、装置を保持しているユーザが現在のクリーニング位置から新しいクリーニング位置に切り替えるべきであることを示すために振動する任意のバイブレータなどの触覚フィードバックコンポーネント48であり得る。代替的には、フィードバックコンポーネント48は、クリーニングセッションが開始されるべきであることを示す識別可能な視覚キュー、聴覚キュー、または振動、ならびにクリーニングセッションが終了すべきであることを示す識別可能な視覚キュー、聴覚キュー、または振動を含み得る。従って、一実施形態によれば、フィードバックコンポーネント48および/またはコントローラ30は、複数の別個の時間間隔を追跡し、適切な間隔で必要なフィードバックを提供するように構成されたタイマを含む。
図2を参照すると、一実施形態では、口腔クリーニング装置10と、口腔クリーニング装置から分離されたオプションの遠隔装置40とを有する口腔クリーニングシステム200が提供される。口腔クリーニング装置10は、本明細書で開示または他の方法で想定される口腔クリーニング装置の実施形態のいずれであることができる。例えば、一実施形態によれば、口腔クリーニング装置10は、1つまたは複数のセンサ28と、プロセッサ32を有するコントローラ30と、電源42とを含む。口腔クリーニング装置10はまた、接続モジュール38を有する。接続モジュール38は、収集されたセンサ情報を遠隔装置40に送信し、Wi−Fi、Bluetooth(登録商標)、近距離無線通信、および/またはセルラモジュールを含むが、これらに限定されない、有線または無線信号を送信することができる任意のモジュール、デバイス、または手段であり得る。
口腔クリーニング装置10はまた、クリーニングセッションの前、間、および/または後にユーザに対するガイダンス指示(guidance instruction)を生成するように構成されたガイダンス発生器46を含む。ガイダンス指示は、例えば、所定のクリーニングルーチンから、またはそれに基づいて、および/または、1つまたは複数の以前のクリーニングセッションに関する情報から抽出することができる。ガイダンス指示は、例えば、クリーニングセッションが開始されるべきであることを示す視覚キュー、聴覚キュー、または触覚キュー、現在の位置から以前にクリーニングされていない新しい位置に切り替えるべきであることをユーザに指示するためのクリーニングセッションの間の複数のペース調整されたキュー(paced cues)、並びにクリーニングセッションが終了すべきであることを示す視覚キュー、聴覚キュー、または触覚キューを含む。
一実施形態によれば、遠隔装置40は、口腔クリーニング装置10と通信するように構成されるまたは通信可能な任意の装置であることができる。例えば、遠隔装置40は、クリーニング装置ホルダまたはステーション、スマートフォンデバイス、コンピュータ、タブレット、サーバ、または他の任意のコンピュータ化された装置であり得る。一実施形態によれば、遠隔装置40は、Wi−Fi、Bluetooth(登録商標)、近距離無線通信、および/またはセルラモジュールを含むが、これらに限定されない、有線または無線信号を受信することができる任意のモジュール、デバイス、または手段であり得る通信モジュール38bを含む。装置40はまた、接続モジュール38を介して送られたセンサ28からの受信情報を使用するコントローラ30bを含む。一実施形態によれば、遠隔装置40は、口内の現在の位置のクリーニングから以前にクリーニングされていない新しい位置へいつ切り替えるかに関する情報など、ユーザにガイド下クリーニングセッション指示を提供するように構成されたユーザインタフェース50を含む。ユーザインタフェース50は、触覚インタフェース、視覚インタフェース、可聴インタフェース、または他の形態のような多くの異なる形態をとることができる。一実施形態によれば、遠隔装置40はまた、クリーニングセッションの前、間、および/または後に、ユーザに対するガイダンス指示を生成するように構成されたガイダンス発生器46bを含むこともできる。ガイダンス指示は、例えば、所定のクリーニングルーチンからまたはそれに基づいて、および/または1つまたは複数の以前のクリーニングセッションに関する情報から抽出することができる。
例えば、遠隔装置40は、ユーザのスマートフォン、ラップトップ、ハンドヘルドまたはウェアラブルコンピュータ、または携帯命令装置であることができる。スマートフォンは、例えばスマートフォンアプリであることができるガイダンス発生器46bを介してクリーニング指示を生成し、スマートフォンスピーカおよび/またはビジュアルディスプレイを介してユーザにクリーニング指示を提供する。一実施形態によれば、口腔クリーニング装置10は、口腔クリーニング装置の位置特定データを表すガイド下クリーニングセッションの間のセンサ28からセンサデータを取得し、そのデータを口腔クリーニング装置のコントローラ30および/または遠隔装置のコントローラ30bに送信する。
図3を参照すると、一実施形態では、口腔クリーニングシステム300が提供される。口腔クリーニングシステム300は、本明細書で開示されるかまたは他の方法で想定される口腔クリーニング装置の実施形態のいずれであることができる、口腔クリーニング装置10の一実施形態である。一実施形態によれば、口腔クリーニング装置は、複数のクリーニング指示を含むガイド下クリーニングセッションをユーザに提供し、ここで、ユーザは、どの領域に次に進むかについての情報を受信することなく、口のある領域から他の領域に移動するよう通知を受信する。オプションとして、ユーザは、セッションをいつ開始するか及びいつセッションを終了するかについての通知も受信する。従って、ユーザは、ガイド下クリーニングセッションに完全に追従するために、通知に応答して移動するだけでよい。位置指示を避けることによって、ユーザに大幅に自由度が与えられる。これは、向上したレベルのユーザ追従(user compliance)をもたらす。
一実施形態によれば、ガイド下クリーニングセッションは、口を、例えば、6つのセグメントに分割し、セッションは、ユーザに、現在のセグメントから次のセグメントへいつ移動すべきかを通知する。本明細書に記載されるように、システムは、次いで、6つの間隔の各々でどの口腔セグメントがクリーニングされたかを決定しようと試みる。6つの間隔に対応する口腔セグメントが推定されると、より高い解像度の位置フィードバックがユーザに与えられる。多くの他のセグメント数が可能であることは理解できる。
口腔クリーニングシステム300の一実施形態によれば、口腔クリーニングシステム300のガイダンス発生器モジュール310は、クリーニングセッションの前、間、および/または後に、ユーザに対して1つまたは複数のクリーニング指示を作成する。ガイダンス指示は、例えば、所定のクリーニングルーチンからまたはそれに基づいて、および/または、1つまたは複数の以前のクリーニングセッションに関する情報から抽出することができる。例えば、ガイダンス発生器モジュール310は、1つまたは複数のクリーニングルーチンに関する情報を含むガイダンスデータベース312を有し得る、または、そのガイダンスデータベース312と有線および/または無線通信し得る。一実施形態によれば、ガイダンス指示は、視覚、聴覚、および/または触覚キューのような開始キュー、口内の第1の位置から口内の新しい位置へ装置を移動させるようにユーザに通知する複数の切り替えキュー、および/または停止キューを含む。
口腔クリーニングシステム300のセンサモジュール320は、装置のセンサ28に指示するまたはそのセンサ28からセンサデータを取得し、このセンサは、例えば、ジャイロスコープ、加速度計、および/または磁力計からなる慣性測定ユニット(IMU)であることができる。センサデータは、装置の動きに関する情報を含む。
口腔クリーニングシステム300の前処理モジュール330は、センサモジュール320からセンサデータを受信し、処理する。一実施形態によれば、前処理は、モーションセンサに対するモータ駆動信号の影響を低減するためのフィルタリング、通信帯域幅を低減するためのダウンサンプリング、およびジャイロスコープオフセット較正などのステップからなる。これらのステップは、得られたセンサデータを改善し、正規化する。
口腔クリーニングシステム300の特徴抽出モジュール340は、前処理モジュール330からの前処理されたセンサ信号と、ガイダンス発生器モジュール310からのガイダンス指示とから、1つまたは複数の特徴を生成する。これらの特徴は、ユーザの口内のヘッド16の位置に関する情報を提供する。一実施形態によれば、特徴は、時間の経過に伴って信号を集約することによって計算することができる。例えば、特徴は、クリーニングセッションの終了時、各ガイダンス間隔の終了時、x秒毎、あるいは他の間隔でまたは他のイベントに応答して計算することができる。
典型的なクリーニングセッションからのデータは、何千ものセンサ測定値を含む。特徴抽出モジュール340は、ユーザがガイダンスに従ったか否かを予測するために必要な関連情報を含む特徴と呼ばれるより少ない値を得るために、信号処理技術をこれらのセンサ測定値に適用する。これらの特徴は、典型的には、ユーザの動きおよびデバイスの方向に関係する。他の特徴のうち、特徴抽出モジュール340は:(i)平均デバイス方向(average device orientation);(ii)デバイスの方向の分散;(iii)モーションセンサ28からの信号のエネルギ;(iv)周波数帯域当たりのモーションセンサの信号のエネルギ;(v)歯に加わる平均力;(vi)クリーニングセッションの持続時間、他多数の特徴を生成することができる。
一実施形態によれば、特徴抽出の第1のステップは、ユーザの頭部に対する口腔クリーニング装置10の方向の推定である。1つまたは複数のセンサ28からの信号に基づいて、世界に対する装置の方向を決定または推定することが可能である。さらに、ユーザの頭部の方向に関する情報は、その間にユーザが臼歯セグメント(molar segments)でクリーニングすると予想されたガイダンス間隔から決定または推定することができる。これらの間隔の間、例えば、装置の主軸の平均方向は、ユーザの顔の方向と整合される(aligned with)。実際的な試験は、デバイスの平均方向は、クリーニングされる口の領域と強く関連していることを示している。例えば、上顎をクリーニングするとき、ブラシの平均方向は上方であり、下顎をクリーニングするとき、口腔クリーニング装置の平均方向は下方である。同様に、口腔クリーニング装置の主軸は、ユーザが口の右側(左側)をクリーニングしているとき、左側(右側)を向く。装置の平均方向とクリーニングされる口の領域との間の関係は、複数のガイド下クリーニングセッション間隔の各々の間に特徴を抽出するために利用されることができる。
ユーザ挙動モデルモジュール350は、ユーザのクリーニング挙動を予測するために使用されるモデルを含む。一実施形態によれば、モデルは、隠れマルコフモデルのような統計モデル、または、クリーニング経路のための一連の制約、例えば、他の多くの可能な制約の中でも特に、(i)ユーザが各口腔セグメントを正確に1回クリーニングする;または(ii)ユーザが常に左下の象限で開始するなど、口腔セグメントがブラシされる順序である。
一実施形態によれば、ユーザのクリーニング挙動は、位置推定器の情報源として使用することができる特定のパターンに従うことが期待される。例えば、ガイド下クリーニングセッションの間の時間間隔の終わりに、ユーザは、ユーザが以前にクリーニングしていたセグメントに隣接する口腔セグメントに移動する可能性が高い。この知識は、例えば、推定されたクリーニング経路が許容経路の予め定義されたセットからのものであることを必要とすることによって、使用することができる。一実施形態によれば、この知識をモデル化するより柔軟な方法は、時間的パターン認識に使用される統計モデルである隠れマルコフモデルによるものである。図4を参照すると、一実施形態では、クリーニング挙動をモデル化するために使用される隠れマルコフモデル400の一例が提供される。モデル内の各円410は、上部前面(UF)、上部右側(UR)、下部左側(LL)、等の口腔セグメントを表す。矢印420は、許容された遷移を表し、各遷移は、ユーザが一つのセグメントから他のセグメントへどれくらいの頻度で移行するかを示す関連する確率を含む。隠れマルコフモデルに加えて、他の多くの統計モデルおよび/またはルールベースモデルが可能である。
口腔クリーニングシステム300の位置推定モジュール360は、計算された信号特徴に基づいて口腔内の口腔クリーニング装置の位置を推定する分類モデルを含む。一実施形態によれば、モジュールは、所与のガイドされたクリーニングセッション間隔からの測定された信号を、位置毎の典型的な信号パターンと比較する。この比較の結果は、この間隔の間の最も可能性の高い口腔の位置を決定するために、典型的なユーザ挙動の以前の知識と組み合わせて使用される。
推定の第1のステップは、センサデータが与えられた口腔セグメントの確率を推定するために使用される分類モデルである。例えば、特徴抽出モジュール340からの特徴のセットが与えられると、分類モデルは、口腔内の口腔クリーニング装置の位置を推定する。例えば、モデルは、ガウスモデル、ディシジョンツリー、サポートベクトルマシンなどであり得る。一実施形態によれば、モデルのパラメータは、口腔内の口腔クリーニング装置の位置を正確に測定した実験室試験からのデータを含む、一組のラベル付き例などのトレーニングデータから学習される。一実施形態によれば、分類器の出力は、確率のベクトルを含む。
口腔クリーニングシステム300の位置推定モジュール360による推定の第2のステップは、分類器ステップで生成された確率を、挙動モデルモジュール350によって生成されたユーザモデルと組み合わせることである。例えば、挙動モデルが隠れマルコフモデルである場合、分類器の出力は、放出確率(emission probabilities)として見ることができ、最も可能性の高い経路は、他の方法の中でもとりわけ、ビタビアルゴリズムで得ることができる。別の例として、挙動モデルが許容経路の予め定められたセットを含む場合、予測された経路は、セグメント確率の積を最大化する有効経路である。
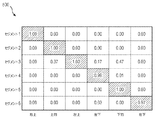
図5を参照すると、一実施形態では、6つの象限に分割された口の位置確率のグラフ500が提供される。この実施形態によれば、許容経路のセットは、各口腔セグメントが正確に1回ブラッシングされるように、繰り返しなしの全ての経路を含む。グラフの列(rows)は、6つのガイド下クリーニング間隔のそれぞれに対応し、各セルは、ユーザが可能な6つのセグメントをクリーニングしていた確率を含む。ハイライトされたセルは、挙動モデルモジュール350によって生成された挙動モデルによる最も可能性の高い経路を示す。
図6を参照すると、一実施形態では、複数の時間間隔を含むガイド下クリーニングセッションの間に口腔ケア装置の位置を推定するための方法600のフローチャートが提供される。ステップ610において、口腔クリーニング装置10が提供される。代替的には、装置10および遠隔装置40を備えた口腔クリーニングシステムが提供されてもよい。口腔クリーニング装置またはシステムは、本明細書に記載または他の方法で想定される装置またはシステムのいずれかであることができる。
本方法のステップ620において、ガイダンス発生器46は、ユーザにガイド下クリーニングセッションを提供する。ガイド下クリーニングセッションは、例えば、ガイダンスデータベース312に予めプログラムされ、格納されることができ、または学習されたガイド下クリーニングセッションであることができる。ガイド下クリーニングセッションは、ユーザに対する複数のクリーニング指示を含む。例えば、ガイド下クリーニングセッションは、口内の第1の位置から口内の第2の位置に切り替えるためのキューによって分離された複数の時間間隔を含むことができる。キューは、口腔ケア装置10のフィードバックコンポーネント48によって生成され、特に、視覚、聴覚、および/または触覚キューであることができる。
本方法のステップ630において、口腔クリーニング装置10のセンサ28は、ガイド下クリーニングセッションの複数の時間間隔のうちの1つの間にセンサデータを生成する。センサデータは、その時間間隔の間のその位置における口腔クリーニング装置の場所、動き、方向、または他のパラメータまたは特性を示す。センサデータは、口腔クリーニング装置のコントローラ30および/または遠隔装置のコントローラ30bに記憶又は送られる。従って、コントローラは、口腔クリーニング装置の場所または動きを示すセンサデータを取得する。
本方法のステップ640において、ガイド下クリーニングセッションの複数の時間間隔のうちの1つまたは複数の間の口腔ケア装置の位置が推定される。一実施形態によれば、コントローラ30は、センサデータを受信し、データを分析して、口腔ケア装置10の位置の推定値を作成する。例えば、推定値は、ガウスモデル、ディシジョンツリー、サポートベクトルマシン他多数のような分類モデルから導出され得る。分類モデルは、学習されたデータに基づいてもよい。分類器の出力は、例えば、確率のベクトルであり得る。
本方法のステップ650において、システムは、ユーザのクリーニング挙動を予測するモデルを生成する。一実施形態によれば、モデルは、隠れマルコフモデルなどの統計モデル、または、ブラッシング経路に対する一連の制約、例えば、(i)ユーザが各口腔セグメントを正確に1回ブラッシングする;または(ii)ユーザが、他の多くの可能な制約の中でも、常に左下の象限から始まるなど、口腔セグメントがブラッシングされる順序である。
方法のステップ660において、システムは、口腔ケア装置の推定位置およびユーザのクリーニング挙動のモデルに基づいて、時間間隔の1つまたは複数の間の口腔ケア装置の位置を決定する。一実施形態によれば、システムは、分類器ステップで生成された位置推定値または確率を、生成されたユーザモデルと組み合わせる。例えば、挙動モデルがHMMである場合、分類器の出力は、放出確率として見ることができ、最も可能性の高い経路は、他の方法の中でもとりわけ、ビタビアルゴリズムを用いて得ることができる。別の例として、挙動モデルが許容経路の予め定められた集合を含む場合、予測経路は、セグメント確率の積を最大化する有効経路である。
方法のオプションのステップ670において、装置またはシステムは、ガイド下クリーニングセッションに関してユーザにフィードバックを提供する。例えば、フィードバックは、リアルタイムで、および/またはその他の方法で、クリーニングセッションの間若しくは後に、または次のクリーニングセッションの直前に、ユーザに提供されてもよい。フィードバックは、位置特定(localization)データに基づいて、口のどのセグメントが適切または不適切にクリーニングされたかを含む、ユーザが口を適切にまたは不適切にクリーニングした旨の指示(indication)を含み得る。口腔クリーニング装置10および/または遠隔装置40によって生成されたフィードバックは、視覚的、書面の、聴覚的、触覚的、又は他のタイプのフィードバックを含む、種々の異なる方法のいずれかでユーザに提供することができる。
すべての定義は、本明細書で定義および使用される場合、辞書の定義、参照により組み込まれる文書中の定義、および/または定義された用語の通常の意味を支配すると理解されるべきである。
本明細書および特許請求の範囲で使用される場合、不定冠詞「1つの、ある(“a”)」および「1つの、ある(“an”)」は、そうでないことが明確に示されていない限り、「少なくとも1つ」を意味すると理解されるべきである。
本明細書および特許請求の範囲で使用される場合、「および/または」という句は、そのように結合された要素の「いずれかまたは両方」、すなわち、いくつかの場合には接続的に存在する要素、他の場合には非接続的に存在する要素を意味すると理解されるべきである。「および/または」で列挙された複数の要素は、同じように解釈されるべきであり、すなわち、そのように接続された要素の「1つまたは複数」である。具体的に識別された要素に関連しているかどうかにかかわらず、「および/または」の節によって具体的に識別された要素以外の他の要素が任意に存在してもよい。
本明細書および特許請求の範囲で使用される場合、「または」は、上で定義された「および/または」と同じ意味を有すると理解されるべきである。例えば、リスト内の項目を分離するとき、「または」または「および/または」は包括的、すなわち、多くの要素または要素のリストのうち、少なくとも1つを含むが、複数も含み、また、オプションで、リストに含まれていない追加の項目を含むと解釈されるべきである。反対に明確に示されているもののみを示す用語「のうちの1つのみ」または「厳密に1つ」などまたは特許請求の範囲で使用される場合、「からなる」は、いくつかの要素または要素のリストのうちの厳密に1つの要素の包含を指す。一般に、本明細書で使用される場合、「または」という用語は、「いずれか」、「のうちの1つ」、「のうちの1つのみ」または「厳密に〜のうちの1つ」などの排他的な用語が先行する場合、排他的な代替物のみを示すと解釈される(すなわち「一方または他方であり、両方ではない」)。
本明細書および特許請求の範囲で使用されるとき、1つまたは複数の要素のリストに関する句「少なくとも1つ」は、その要素のリストの任意の1つまたは複数の要素から選択される少なくとも1つの要素を意味するが、その要素のリストに特定的に列挙された各要素およびすべての要素のうち少なくとも1つを必ず含むわけではなく、その要素のリストにある要素の任意の組み合わせを排除するものではないと理解されるべきである。この定義はまた、「少なくとも1つ」という句が指す要素のリスト内で特定的に識別された要素以外の要素が、特定的に識別された要素に関連するにしろ関連しないにしろ、オプションで存在し得ることを可能にする。
また、反対のことが明確に示されていない限り、複数のステップまたは動作を含む本明細書で特許請求の範囲に記載されている方法では、方法のステップまたは動作の順序は、必ずしも方法のステップまたは動作が列挙されている順序に限定されるものではないことも理解されるべきである。
特許請求の範囲および上の記載において、「〜有する、を含む(comprising)」、「〜を含む(including)」、「〜を有する(carrying)」、「〜を有する(having)」、「〜を含有する(containing)」、「〜を含む(involving)」、「〜を保持する(holding)」、「〜から構成される(composed of)」などのすべての移行句は、オープンエンド(非限定的)である、すなわち、含むことを意味するがこれに限定されるものではないと理解されるべきである。「からなる」および「から本質的になる」という移行句だけが、それぞれ、限定的な移行句または半限定的な移行句である。
本明細書ではいくつかの本発明の実施形態を説明し例示したが、当業者は、機能を実行するためのならびに/または本明細書に記載された結果および/または利点のうちの1つまたは複数を得るための様々な他の手段および/または構造を容易に想到するであろう。そして、そのような変形および/または修正の各々は、本明細書に記載の発明の実施形態の範囲内にあると見なされる。より一般的には、当業者は、本明細書に記載のすべてのパラメータ、寸法、材料、および構成が例示的であることを意味し、実際のパラメータ、寸法、材料、および/または構成は、本発明の教示が使用されている特定の用途に依存することを容易に理解するであろう。当業者であれば、本明細書に記載の特定の発明の実施形態に対する多くの均等物を認識し、または単なる日常的な実験を用いて確かめることができるだろう。したがって、前述の実施形態は例としてのみ提示され、添付の特許請求の範囲およびその均等物の範囲内で、本発明の実施形態は具体的に説明および特許請求の範囲に記載される以外の方法で実施され得ることが理解されるべきである。本開示の発明の実施形態は、本明細書に記載されている個々の特徴、システム、物品、材料、キット、および/または方法のそれぞれに関する。加えて、そのような特徴、システム、物品、材料、キット、および/または方法が互いに矛盾していない場合、そのような特徴、システム、物品、材料、キット、および/または方法の2つ以上の任意の組み合わせも、本開示の発明の範囲内に含まれる。