JP2019197475A - Flight device guide system - Google Patents
Flight device guide system Download PDFInfo
- Publication number
- JP2019197475A JP2019197475A JP2018092203A JP2018092203A JP2019197475A JP 2019197475 A JP2019197475 A JP 2019197475A JP 2018092203 A JP2018092203 A JP 2018092203A JP 2018092203 A JP2018092203 A JP 2018092203A JP 2019197475 A JP2019197475 A JP 2019197475A
- Authority
- JP
- Japan
- Prior art keywords
- flying device
- flight
- unit
- lost
- tracking
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- RZVHIXYEVGDQDX-UHFFFAOYSA-N 9,10-anthraquinone Chemical group C1=CC=C2C(=O)C3=CC=CC=C3C(=O)C2=C1 RZVHIXYEVGDQDX-UHFFFAOYSA-N 0.000 claims description 35
- 238000004891 communication Methods 0.000 claims description 33
- 230000001678 irradiating effect Effects 0.000 claims 3
- 230000001133 acceleration Effects 0.000 description 25
- 238000012545 processing Methods 0.000 description 25
- 238000004364 calculation method Methods 0.000 description 12
- 230000005540 biological transmission Effects 0.000 description 10
- 238000000034 method Methods 0.000 description 9
- 230000008569 process Effects 0.000 description 9
- 230000008859 change Effects 0.000 description 7
- 238000001514 detection method Methods 0.000 description 7
- 238000004590 computer program Methods 0.000 description 6
- 230000004048 modification Effects 0.000 description 5
- 238000012986 modification Methods 0.000 description 5
- 230000007423 decrease Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 230000001141 propulsive effect Effects 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
Images






Abstract
Description
本発明は、飛行装置誘導システムに関する。 The present invention relates to a flying device guidance system.
近年、いわゆるドローンと称される飛行装置が普及している。飛行装置は、主に地上の操作者による無線または有線での遠隔操作によって飛行する。このように飛行装置を遠隔操作する場合、飛行装置の現在位置を同期的に取得する必要がある。特許文献1の場合、飛行装置の周囲に存在する障害物の情報を取得し、取得した情報に基づいて飛行装置の安全な飛行が確保される安全飛行範囲を設定している。そして、地上に設けられた測量部は、安全飛行範囲を飛行する飛行装置を追尾する。 In recent years, so-called drones have become popular. The flying device flies mainly by wireless or wired remote operation by an operator on the ground. When remotely operating the flying device in this way, it is necessary to acquire the current position of the flying device synchronously. In the case of patent document 1, the information of the obstacle which exists around a flight apparatus is acquired, and the safe flight range in which the safe flight of a flight apparatus is ensured based on the acquired information is set. Then, the surveying unit provided on the ground tracks the flying device flying in the safe flight range.
しかしながら、このように測量部で飛行装置を追尾する場合、飛行装置の飛行姿勢や飛行経路によっては、測量部が飛行装置を見失ってしまういわゆるトラッキングロストが生じることがある。トラッキングロストが生じると、飛行装置は地上の設備から誘導を受けることができず、飛行装置の飛行の不安定化を招くという問題がある。 However, when the surveying unit tracks the flying device in this way, depending on the flight posture and flight path of the flying device, a so-called tracking lost that causes the surveying unit to lose sight of the flying device may occur. When the tracking lost occurs, the flying device cannot receive guidance from the facilities on the ground, and there is a problem that the flying of the flying device becomes unstable.
そこで、本発明の目的は、トラッキングロストが生じたときでも、測量部による飛行装置の再追尾を容易にする飛行装置誘導システムを提供することにある。 Therefore, an object of the present invention is to provide a flying device guidance system that facilitates re-tracking of a flying device by a surveying unit even when tracking loss occurs.
請求項1記載の発明では、追尾判定部は、飛行装置の飛行中に測量部による追尾が維持されているか否かを判定する。ロスト位置定義部は、追尾判定部において追尾が維持できていないとき、つまりトラッキングロストによるロスト判定がなされたとき、ロスト位置を定義する。ロスト位置は、このロスト判定がなされたときの飛行装置の飛行位置である。そして、探索制御部は、ロスト判定がなされたとき、ロスト位置を中心に飛行装置に設けられている再帰反射部材を探索する。これとともに、停止制御部は、飛行装置の自立飛行を停止し、飛行装置をその場に停止させる。ここで、飛行装置の停止とは、飛行を継続しつつ位置や高度を変化しない状態を意味する。このように、ロスト判定がなされたとき、飛行装置はその場に停止するとともに、測量部は探索制御部によってロスト位置を中心とした飛行装置の探索を行なう。これにより、飛行装置は、測量部によって速やかに探索される。したがって、トラッキングロストが生じたときでも、測量部による飛行装置の再追尾を容易にすることができる。 In the first aspect of the invention, the tracking determination unit determines whether tracking by the surveying unit is maintained during the flight of the flying device. The lost position definition unit defines the lost position when tracking is not maintained by the tracking determination unit, that is, when the lost determination is made by tracking lost. The lost position is the flight position of the flying device when this lost determination is made. Then, when the lost determination is made, the search control unit searches for the retroreflective member provided in the flying device around the lost position. At the same time, the stop control unit stops the independent flight of the flying device and stops the flying device on the spot. Here, the stop of the flying device means a state in which the position and altitude are not changed while continuing the flight. As described above, when the lost determination is made, the flying device stops on the spot, and the surveying unit searches the flying device around the lost position by the search control unit. Thereby, the flying device is quickly searched by the surveying unit. Therefore, even when tracking loss occurs, re-tracking of the flying device by the surveying unit can be facilitated.
また、請求項2記載の発明では、追尾判定部は、飛行装置の飛行中に測量部による追尾が維持されているか否かを判定する。ロスト位置定義部は、追尾判定部において追尾が維持できていないとき、つまりトラッキングロストによるロスト判定がなされたとき、ロスト位置を定義する。ロスト位置は、このロスト判定がなされたときの飛行装置の飛行位置である。そして、探索制御部は、ロスト判定がなされたとき、ロスト位置を中心に飛行装置に設けられている再帰反射部材を探索する。これとともに、停止制御部は、飛行装置を、移動を考慮したロスト位置に戻して停止させる。飛行装置は、飛行を継続することによって、トラッキングロストが生じてからロスト判定がなされるまでの間に位置が変化するおそれがある。そこで、停止制御部は、ロスト判定がなされたとき、位置が変化した飛行装置をロスト位置まで戻して停止させる。ここで、飛行装置の停止とは、飛行を継続しつつ位置や高度を変化しない状態を意味する。このように、ロスト判定がなされたとき、飛行装置はロスト位置に復帰して停止するとともに、測量部は探索制御部によってロスト位置を中心とした飛行装置の探索を行なう。これにより、飛行装置は、測量部によって速やかに探索される。したがって、トラッキングロストが生じたときでも、測量部による飛行装置の再追尾を容易にすることができる。 In the second aspect of the invention, the tracking determination unit determines whether tracking by the surveying unit is maintained during the flight of the flying device. The lost position definition unit defines the lost position when tracking is not maintained by the tracking determination unit, that is, when the lost determination is made by tracking lost. The lost position is the flight position of the flying device when this lost determination is made. Then, when the lost determination is made, the search control unit searches for the retroreflective member provided in the flying device around the lost position. At the same time, the stop control unit returns the flying device to the lost position in consideration of the movement and stops it. By continuing the flight, the flying device may change its position after the tracking loss occurs until the lost determination is made. Therefore, when the lost determination is made, the stop control unit returns the flying device whose position has changed to the lost position and stops it. Here, the stop of the flying device means a state in which the position and altitude are not changed while continuing the flight. In this way, when the lost determination is made, the flying device returns to the lost position and stops, and the surveying unit searches the flying device around the lost position by the search control unit. Thereby, the flying device is quickly searched by the surveying unit. Therefore, even when tracking loss occurs, re-tracking of the flying device by the surveying unit can be facilitated.
請求項4記載の発明では、追尾判定部は、飛行装置の飛行中に測量部による追尾が維持されているか否かを判定する。通信部は、追尾判定部において追尾が維持できていないとき、つまりトラッキングロストによるロスト判定がなされたとき、位置取得部で取得した飛行装置の飛行位置を測量部へ伝達する。飛行位置は、このロスト判定がなされたときの飛行装置の飛行位置である。そして、探索制御部は、ロスト判定がなされたとき、伝達された飛行装置の飛行位置を中心に飛行装置に設けられている再帰反射部材を探索する。このように、ロスト判定がなされたとき、飛行装置は飛行位置を測量部に伝達する。これとともに、測量部は、ロスト位置に加え、探索制御部によって飛行装置から伝達された飛行位置を中心として飛行装置の探索を行なう。これにより、飛行装置は、測量部によって速やかに探索される。したがって、トラッキングロストが生じたときでも、測量部による飛行装置の再追尾を容易にすることができる。 In the invention according to claim 4, the tracking determination unit determines whether or not tracking by the surveying unit is maintained during the flight of the flying device. The communication unit transmits the flight position of the flying device acquired by the position acquisition unit to the surveying unit when tracking is not maintained in the tracking determination unit, that is, when the lost determination is made by tracking lost. The flight position is the flight position of the flying device when this lost determination is made. Then, when the lost determination is made, the search control unit searches for the retroreflective member provided in the flying device around the transmitted flight position of the flying device. As described above, when the lost determination is made, the flying device transmits the flight position to the surveying unit. At the same time, the surveying unit searches for the flying device around the flying position transmitted from the flying device by the search control unit in addition to the lost position. Thereby, the flying device is quickly searched by the surveying unit. Therefore, even when tracking loss occurs, re-tracking of the flying device by the surveying unit can be facilitated.
以下、飛行装置誘導システムの複数の実施形態を図面に基づいて説明する。なお、複数の実施形態において実質的に同一の構成部位には同一の符号を付し、説明を省略する。
(第1実施形態)
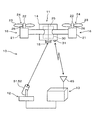
図1および図2に示すように第1実施形態による飛行装置誘導システム10は、飛行装置11、測量部12および地上基地13を備える。飛行装置11は、図2に示すように本体14、再帰反射部材15およびスラスタ16を備えている。飛行装置11は、測量部12から照射された光を再帰反射部材15で反射する。測量部12は、再帰反射部材15で反射した光を用いて飛行装置11を追尾するとともに、飛行装置11の飛行データを取得する。
Hereinafter, a plurality of embodiments of a flying device guidance system will be described with reference to the drawings. Note that, in a plurality of embodiments, substantially the same components are denoted by the same reference numerals, and description thereof is omitted.
(First embodiment)
As shown in FIGS. 1 and 2, the flying
飛行装置11は、本体14に設けられている複数のスラスタ16を備えている。スラスタ16は、放射状または円環状に形成されている本体14に設けられている。スラスタ16は、いずれもモータ21、軸部材22、プロペラ23およびピッチ変更機構部24を有している。モータ21は、プロペラ23を駆動する駆動源である。モータ21は、本体14に収容されているバッテリ25などの電源から供給される電力によって駆動される。モータ21の回転は、図示しない回転子と一体になった軸部材22を通してプロペラ23に伝達される。プロペラ23は、モータ21によって回転駆動される。ピッチ変更機構部24は、サーボモータ26が発生する駆動力によって、プロペラ23のピッチを変更する。サーボモータ26は、バッテリ25から供給される電力によって駆動される。スラスタ16は、モータ21でプロペラ23を駆動することによって推進力を発生する。このとき、スラスタ16から発生する推進力の大きさおよび推進力の向きは、モータ21の回転数およびプロペラ23のピッチを変更することによって制御される。
The
再帰反射部材15は、飛行装置11の本体14に設けられている。再帰反射部材15は、例えば重力方向において本体14の下方など、測量部12から視認が容易な位置に設けられている。再帰反射部材15は、測量部12から照射された光を、この測量部12に向けて反射する。すなわち、再帰反射部材15は、測量部12から照射された光を、光源である測量部12に向けて反射する。
The
飛行装置11は、制御ユニット30および通信部31を備えている。制御ユニット30は、図1に示すように制御演算部32および記憶部33を有している。制御演算部32は、CPU、ROMおよびRAMを有するマイクロコンピュータで構成されている。制御演算部32は、CPUでROMに記憶されているコンピュータプログラムを実行することにより、飛行装置11の全体を制御する。制御演算部32は、コンピュータプログラムを実行することにより、状態取得部34および飛行制御部35をソフトウェア的に実現している。なお、状態取得部34および飛行制御部35は、ソフトウェア的に限らず、ハードウェア的、あるいはソフトウェアとハードウェアとの協働によって実現してもよい。記憶部33は、例えば不揮発性メモリなどを有している。記憶部33は、予め設定された飛行計画をデータとして記憶している。飛行計画は、例えば飛行装置11が飛行する飛行ルートや飛行高度などが含まれている。通信部31は、地上基地13との間で無線または有線で通信する。
The flying
状態取得部34は、本体14の傾きや本体14に加わる加速度などから飛行装置11の飛行状態を取得する。具体的には、状態取得部34は、GPSセンサ41、加速度センサ42、角速度センサ43、地磁気センサ44および高度センサ45などと接続している。GPSセンサ41は、GPS衛星から出力されるGPS信号を受信する。また、加速度センサ42は、3次元の3つの軸方向において本体14に加わる加速度を検出する。角速度センサ43は、3次元の3つの軸方向において本体14に加わる角速度を検出する。地磁気センサ44は、3次元の3つの軸方向における地磁気を検出する。高度センサ45は、天地方向における高度を検出する。各種センサのうち、GPSセンサ41は、飛行装置11の外界からの情報によって飛行装置11の位置を取得する外界センサである。一方、加速度センサ42、角速度センサ43、地磁気センサ44および高度センサ45は、飛行装置11の外界からの情報に依存することなく飛行装置11の位置を取得する内界センサである。
The
状態取得部34は、これらGPSセンサ41で受信したGPS信号、加速度センサ42で検出した加速度、角速度センサ43で検出した角速度、地磁気センサ44で検出した地磁気などから本体14の飛行姿勢、飛行方向および飛行速度を検出する。また、状態取得部34は、GPSセンサ41で検出したGPS信号と各種のセンサによる検出値から本体14の飛行位置を外部に依存することなく自立的に検出する。さらに、状態取得部34は、GPSセンサ41で受信したGPS信号、および高度センサ45で検出した高度から本体14の飛行高度を検出する。このように、状態取得部34は、本体14の飛行姿勢、飛行位置および飛行高度など、飛行装置11の飛行に必要な情報を飛行状態として検出する。状態取得部34は、飛行装置11の位置を取得する位置取得部として機能する。状態取得部34は、これらに加え、可視的な画像を取得する図示しないカメラ、あるいは周囲の物体までの距離を測定する図示しないLIDAR(Light Detection And Ranging)などに接続してもよい。
The
飛行制御部35は、飛行装置11の飛行を、自動制御モードまたは手動制御モードによって制御する。飛行制御部35は、位置制御部に相当する。自動制御モードは、操作者の操作によらずに、飛行装置11を自動的に飛行させるモードである。自動制御モードのとき、飛行制御部35は、記憶部33に記憶されている、または地上基地13から送信される飛行計画に沿って、飛行装置11の飛行を自動的に制御する。すなわち、飛行制御部35は、この自動制御モードのとき、状態取得部34で検出した本体14の飛行状態に基づいて、スラスタ16の推進力を制御する。これにより、飛行制御部35は、操作者の操作によらず、飛行装置11を記憶部33に記憶された飛行計画または地上基地13から送信される飛行計画に沿って自動的に飛行させる。
The
手動制御モードは、操作者の操作にしたがって飛行装置11を飛行させる飛行モードである。手動制御モードのとき、操作者は、飛行装置11と遠隔に設けられている地上基地13を通して飛行装置11の飛行状態を制御する。飛行制御部35は、地上基地13を通して操作者が入力した操作、および状態取得部34で取得した飛行状態に基づいてスラスタ16の推進力を制御する。これにより、飛行制御部35は、操作者の意思に沿って飛行装置11の飛行を制御する。
The manual control mode is a flight mode in which the flying
測量部12は、照射部51、受光部52およびデータ処理部53を有している。照射部51は、例えばレーザ光などの光を照射する。照射部51は、連続的または所定の間隔で定期的にレーザ光を照射する。受光部52は、飛行装置11に設けられている再帰反射部材15で反射した光を受光する。すなわち、受光部52は、照射部51から照射され、飛行装置11の再帰反射部材15で反射した光を受光する。
The surveying
地上基地13は、測量部12と有線または無線によって通信可能に接続している。地上基地13は、制御演算部61、測量制御部62、記憶部64および地上通信部65を有している。制御演算部61は、CPU、ROMおよびRAMを有するマイクロコンピュータで構成されている。制御演算部61は、CPUでROMに記憶されたコンピュータプログラムを実行することにより、測量部12および地上基地13を制御する。制御演算部61は、コンピュータプログラムを実行することにより、測量部12に設けられているデータ処理部53および測量制御部62をソフトウェア的に実現している。なお、これらデータ処理部53および測量制御部62は、ソフトウェア的に限らず、ハードウェア的、あるいはソフトウェアとハードウェアとの協働によって実現してもよい。また、測量部12と地上基地13とは、図2に示すように別体に構成するだけでなく、一体に構成してもよい。
The
測量制御部62は、測量部12の制御を実行する。具体的には、測量制御部62は、例えば図示しないモータやアクチュエータを用いて測量部12を任意の方向へ駆動し、飛行する飛行装置11へ向けて測量部12を追尾させる。これとともに、測量制御部62は、照射部51を制御して光の照射を実行するとともに、受光部52を制御して光の受光を実行する。このように、測量制御部62は、飛行装置11へ向けて測量部12を追尾させながら、飛行装置11への光の照射および反射した光の受光を制御する。データ処理部53は、受光部52で受光した光から、飛行装置11の飛行データを取得する。この飛行データは、測量部12から飛行装置11までの距離、および測量部12に対する飛行装置11の角度を少なくとも含んでいる。すなわち、データ処理部53は、受光部52で受光した光から、飛行装置11までの距離と、飛行装置11の角度とを飛行データとして取得する。ここで、飛行装置11の角度とは、測量部12を基準点とし、基準点を中心とする水平方向の角度および垂直方向の角度である。つまり、測量部12を基準点としたとき、水平方向には0〜360°の水平角度が設定され、垂直方向には0〜90°の垂直角度が設定される。この場合、水平角度の基準となる「0°」は、例えば地図座標における「北」などのように任意に設定される。また、垂直角度の基準となる「0°」は、例えば地面と平行な面に設定される。データ処理部53は、受光部52で受光した光から、飛行装置11の水平角度および垂直角度を取得する。また、データ処理部53は、上述の飛行データに飛行装置11の位置座標を含めて送信データを作成する。ここで、測量部12が設置されている位置は、例えばGPS信号などに基づいて地球上の絶対的な位置が特定されている。データ処理部53は、この測量部12の絶対的な位置と測量部12で取得した飛行データとに基づいて、飛行装置11の位置座標を特定する。そして、データ処理部53は、これら飛行データおよび位置座標を用いて送信データを作成する。
The
上述のようにデータ処理部53は、取得した飛行データおよび位置座標を送信データとして作成する。すなわち、データ処理部53は、取得した飛行データに、位置座標を加えて送信データを作成する。地上通信部65は、データ処理部53で作成された送信データを、飛行装置11へ送信する。このとき、地上通信部65は、送信データに加え、記憶部64に記憶された飛行計画も飛行装置11へ送信する。すなわち、データ処理部53で作成された送信データは、地上通信部65から飛行装置11の通信部31へ送信される。通信部31において送信データを受信した飛行装置11の飛行制御部35は、地上基地13から送信された送信データを参照してスラスタ16を制御する。これにより、飛行装置11は、地上基地13で取得された飛行データおよび位置座標を含む飛行データ、ならびに地上基地13から送信された飛行計画を参照しながら、飛行制御部35による制御よって自立的に飛行する。記憶部64は、例えば不揮発性のメモリなどを有している。記憶部64は、飛行装置11の飛行経路を設定した飛行計画を記憶している。この飛行計画は、飛行装置11の記憶部33に記憶されている飛行計画と同一であってもよく、異なっていてもよい。また、地上基地13から飛行装置11へ飛行計画を送信することにより、飛行装置11は時々刻々と地上基地13で変更される飛行計画に沿って柔軟な飛行を実行することができる。
As described above, the data processing unit 53 creates the acquired flight data and position coordinates as transmission data. That is, the data processing unit 53 adds the position coordinates to the acquired flight data and creates transmission data. The
飛行装置誘導システム10は、追尾判定部71、ロスト位置定義部72、探索制御部73および停止制御部74を備えている。具体的には、飛行装置11または地上基地13は、制御演算部32または制御演算部61でコンピュータプログラムを実行することにより、追尾判定部71、ロスト位置定義部72、探索制御部73および停止制御部74をソフトウェア的に実現している。なお、これら追尾判定部71、ロスト位置定義部72、探索制御部73および停止制御部74は、ソフトウェア的に限らず、ハードウェア的、あるいはソフトウェアとハードウェアとの協働によって実現してもよい。第1実施形態の場合、追尾判定部71、ロスト位置定義部72および探索制御部73は地上基地13に設けられ、停止制御部74は飛行装置11に設けられている。これら追尾判定部71、ロスト位置定義部72、探索制御部73および停止制御部74は、飛行装置11または地上基地13のいずれかまたは両方に任意の組み合わせで設けてもよく、別途の機器としてもよい。
The flying
追尾判定部71は、測量部12が飛行装置11の追尾を維持しているか否かを判定する。具体的には、追尾判定部71は、飛行装置11が飛行しているとき、測量部12の照射部51から照射し、飛行装置11の再帰反射部材15で反射した光が受光部52で受光できているか否かを判定する。測量部12は、測量制御部62を通して駆動されることにより、照射部51から照射して再帰反射部材15で反射する光を用いて、飛行装置11を追尾する。つまり、測量部12の照射部51から照射された光は、飛行装置11の再帰反射部材15との間を往復する。このとき、飛行装置11の飛行姿勢や飛行装置11の周囲に存在する障害物によって、測量部12と飛行装置11との間の光の往復が妨げられると、受光部52は照射部51から照射された光を受光できない。このように、測量部12は、測量部12と飛行装置11との間の光の往復が妨げられたとき、飛行装置11を認識できず、飛行装置11の追尾ができない状態となる。すなわち、測量部12は、飛行装置11を見失ったトラッキングロストの状態となる。追尾判定部71は、測量部12が飛行装置11を認識できないとき、トラッキングロストが生じたとして、「ロスト判定」を行なう。
The tracking
ロスト位置定義部72は、追尾判定部71において「ロスト判定」がされたとき、この「ロスト判定」がされたときの飛行装置11の位置をロスト位置P0と定義する。すなわち、ロスト位置定義部72は、測量部12で取得した飛行データを用いて、ロスト判定がされたときの飛行装置11の飛行位置をロスト位置P0と定義する。ロスト位置定義部72は、定義したロスト位置P0を記憶部64に記憶する。
When the
ロスト位置定義部72で「ロスト判定」がされたとき、飛行制御部35は、飛行装置11の位置を推定可能であるか否かを判定する。すなわち、飛行制御部35は、GPSセンサ41によって飛行装置11の飛行位置を推定可能であるか否かを判定する。飛行装置11がGPSセンサ41を有しているとき、飛行装置11の飛行位置はGPSセンサ41でGPS信号を受信することによって推定可能である。そのため、飛行制御部35は、GPSセンサ41がGPS信号を受信できる状態であれば、飛行装置11の飛行位置を推定可能であると判定する。一方、飛行装置11がGPSセンサ41を有していても、GPSセンサ41でGPS信号が受信できないとき、飛行装置11の飛行位置の推定は困難である。例えば飛行装置11が橋梁やトンネルなどの構造物の内部を飛行するとき、GPSセンサ41はGPS信号の受信が困難である。飛行制御部35は、GPSセンサ41がGPS信号を受信困難な状態であれば、飛行装置11の飛行位置を推定できないと判定する。また、本実施形態と異なり飛行装置11がGPSセンサ41を有していない場合もある。このように飛行装置11がGPSセンサ41を有していないとき、飛行制御部35は飛行装置11の飛行位置を推定できないと判定する。
When “lost determination” is made in the lost
探索制御部73は、測量制御部62を通して測量部12を駆動する。探索制御部73は、ロスト位置P0を中心に測量部12を駆動する。これにより、測量部12は、ロスト位置P0を中心として、飛行装置11に設けられている再帰反射部材15を探索する。
The
飛行制御部35は、ロスト判定がされたとき、飛行装置11に設定された飛行計画に沿った飛行を停止する。すなわち、飛行装置11は、自動制御モードで飛行計画に沿った制御されているとき、ロスト判定がされると、飛行計画に沿った飛行を停止する。そして、停止制御部74は、飛行装置11をその場に停止する停止制御を行なう。すなわち、停止制御部74は、ロスト判定がされた後、速やかに飛行装置11の飛行を停止して、その場でのホバリングなどのように飛行装置11の飛行位置や飛行高度の変更を制限する。停止制御部74は、飛行制御部35において飛行装置11の飛行位置を推定可能であると判定されたとき、GPSセンサ41で受信したGPS信号に基づいて停止制御を行なう。
When the lost determination is made, the
一方、停止制御部74は、飛行制御部35において飛行装置11の飛行位置を推定困難であると判定されたとき、飛行装置11に設けられている加速度センサ42、角速度センサ43および地磁気センサ44で検出した検出値に基づいて停止制御を行なう。すなわち、GPSセンサ41でGPS信号の受信が困難なとき、飛行装置11の飛行位置はGPS信号による特定が困難である。そのため、停止制御部74は、外界センサであるGPSセンサ41に代えて、内界センサである加速度センサ42、角速度センサ43および地磁気センサ44を用いて停止制御を行なう。このとき、停止制御部74は、GPSセンサ41でGPS信号を受信可能なとき、および受信が困難なときのいずれも、高度センサ45で検出した高度を用いて飛行装置11の高度についても停止制御を行なう。また、停止制御部74は、GPSセンサ41でGPS信号を受信可能であるときでも、GPS信号に基づく位置の推定に加えて、内界センサである加速度センサ42、角速度センサ43および地磁気センサ44も用いて停止制御を行なってもよい。
On the other hand, when the
測量部12が飛行装置11を追尾できないロスト判定がされたとき、飛行装置11はロスト位置P0の近辺に存在する可能性が高い。仮にロスト判定がされたにもかかわらず飛行装置11が飛行を継続すると、測量部12の追尾は時間の経過とともに難易度が高まる。そこで、停止制御部74は、ロスト判定がされたとき、飛行装置11の飛行を停止し、飛行装置11の飛行位置や飛行高度の変更を制限する。そして、探索制御部73は、測量部12によって、このロスト位置P0を中心に、飛行装置11に設けられている再帰反射部材15の探索を行なう。これにより、測量部12は、ロスト位置P0の近辺で停止している飛行装置11を探索することとなり、飛行装置11の発見および飛行装置11の追尾の再開が容易になる。
When the determination that the surveying
停止制御部74は、飛行装置11または地上基地13のいずれに設けてもよい。すなわち、停止制御部74は、飛行装置11に設けることにより、地上基地13との通信を行なうことなく自立的に、飛行装置11をロスト位置P0の近辺で停止させる。また、停止制御部74は、地上基地13に設けることにより、通信部31および地上通信部65を通した通信によって、飛行装置11をロスト位置P0の近辺で停止させる。
The
以下、上記の構成による飛行装置誘導システム10における処理の流れを図3に基づいて説明する。
飛行装置11が飛行を開始すると、追尾判定部71は、ロスト判定が行なわれたか否かを判定する(S101)。すなわち、追尾判定部71は、測量部12が飛行装置11の追尾を維持しているか否かを判定するとともに、トラッキングロスが生じていればロスト判定を行なう。飛行制御部35は、追尾判定部71でロスト判定が行なわれると(S101:Yes)、飛行計画に沿った飛行を中止する(S102)。すなわち、飛行制御部35は、ロスト判定が行なわれると、自動制御モードによる飛行計画に沿った飛行を停止する。地上通信部65は、追尾判定部71においてロスト判定が行なわれると、その旨を飛行装置11へ送信する。飛行制御部35は、通信部31において地上通信部65からロスト判定が行なわれた旨を受信すると、飛行計画に沿った飛行を中止する。
Hereinafter, the flow of processing in the flying
When the flying
ロスト位置定義部72は、S102において飛行計画に沿った飛行が停止されると、ロスト位置P0を定義する(S103)。すなわち、ロスト位置定義部72は、ロスト判定がされたときの飛行装置11の飛行位置をロスト位置P0と定義する。そして、停止制御部74は、飛行装置11をロスト位置P0で停止する停止制御を行なう(S104)。すなわち、地上通信部65は、ロスト判定が行なわれると、ロスト位置定義部72で定義されたロスト位置P0を飛行装置11へ送信する。停止制御部74は、通信部31を通して地上通信部65からロスト位置P0を取得する。そして、停止制御部74は、ロスト判定を受信すると、飛行装置11をロスト位置P0に維持した状態でホバリングへ移行させる。追尾判定部71は、S101においてロスト判定が行なわれていないと(S101:No)、ロスト判定が行なわれるまでS101の処理を繰り返す。
When the flight according to the flight plan is stopped in S102, the lost
飛行制御部35は、S104において停止制御に移行すると、飛行装置11の飛行位置を推定可能であるか否かを判定する(S105)。すなわち、飛行制御部35は、GPSセンサ41で受信したGPS信号によって飛行装置11の飛行位置が推定可能であるか否かを判定する。停止制御部74は、S105において飛行位置が推定可能であると判定されたとき(S105:Yes)、GPSセンサ41で受信したGPS信号に基づいて飛行装置11をロスト位置P0に停止させる制御を行なう(S106)。この場合、停止制御部74は、GPS信号に加えて、内界センサである加速度センサ42、角速度センサ43および地磁気センサ44の検出値も用いて飛行装置11の停止を制御してもよい。一方、停止制御部74は、S105において飛行位置が推定困難であると判定されたとき(S105:No)、内界センサである加速度センサ42、角速度センサ43および地磁気センサ44の検出値に基づいて飛行装置11をロスト位置P0に停止させる制御を行なう(S107)。
When the
探索制御部73は、S106またはS107において停止制御が行なわれているとき、測量部12を駆動して再帰反射部材15を探索する(S108)。すなわち、探索制御部73は、停止制御によって停止している飛行装置11に設けられている再帰反射部材15を探索する。これにより、探索制御部73は、停止している飛行装置11を、ロスト位置P0を中心として探索する。
When the stop control is performed in S106 or S107, the
以上説明した第1実施形態では、追尾判定部71は、飛行装置11の飛行中に測量部12による追尾が維持されているか否かを判定する。ロスト位置定義部72は、追尾判定部71においてロスト判定がなされたとき、ロスト位置P0を定義する。そして、探索制御部73は、ロスト判定がなされたとき、ロスト位置P0を中心に飛行装置11に設けられている再帰反射部材15を探索する。これとともに、停止制御部74は、飛行装置11の飛行計画に沿った飛行を停止し、飛行装置11をその場に停止させる。これにより、飛行装置11は、測量部12によって速やかに探索される。したがって、トラッキングロストが生じたときでも、測量部12による飛行装置11の再追尾を容易にすることができる。
In the first embodiment described above, the tracking
(第2実施形態)
第2実施形態による飛行装置誘導システムについて説明する。
第2実施形態による飛行装置誘導システム10は、ロスト位置定義部72における処理の流れが第1実施形態と異なる。第2実施形態のロスト位置定義部72は、追尾判定部71において「ロスト判定」がされたとき、この「ロスト判定」がされた時刻を時刻T1として取得する。これに加え、ロスト位置定義部72は、時刻T1から飛行制御部35によって飛行計画に沿った制御が中止される時刻T2までの期間Tdを取得する。すなわち、期間Tdは、Td=T2-T1である。ロスト位置定義部72は、例えば制御演算部61に設けられている図示しないタイマなどに基づいて時刻T1、時刻T2を検出し、期間Tdを算出する。さらに、ロスト位置定義部72は、この時刻T1から時刻T2までの期間Tdにおける飛行装置11の飛行速度Vを取得する。
(Second Embodiment)
A flying device guidance system according to a second embodiment will be described.
The flying
ロスト位置定義部72は、測量部12で取得した飛行データ、または飛行装置11の加速度センサ42および角速度センサ43の検出値から、飛行装置11の飛行速度Vを取得する。この場合、ロスト位置定義部72は、測量部12および状態取得部34の双方から飛行速度Vを取得してもよく、いずれか一方から飛行速度Vを取得してもよい。ロスト位置定義部72は、これら期間Tdおよび飛行速度Vに基づいて、ロスト判定が行なわれた時刻T1における飛行装置11の飛行位置を算出する。そして、この時刻T1における飛行装置11の飛行位置をロスト位置P0と定義する。
The lost
飛行装置11は、常に速度の変化をともなって飛行するとともに、気流といった外乱の影響などを受けて時々刻々と飛行位置が変化する。そのため、飛行装置11の飛行位置は、ロスト判定が行なわれてから飛行計画に沿った飛行を中止するまでの間に、移動していることが考えられる。その結果、停止制御によって飛行装置11の飛行を停止しても、その位置はロスト位置P0から移動していることも考えられる。そこで、ロスト位置定義部72は、時刻T1における飛行装置11の飛行位置を算出し、これをロスト位置P0と定義する。停止制御部74は、ロスト位置定義部72で定義されたロスト位置P0に基づいて飛行装置11の停止制御を行なう。
The flying
以下、図4に基づいて第2実施形態による飛行装置誘導システム10における処理の流れを説明する。なお、第1実施形態と共通する処理については、説明を省略する。
飛行装置11が飛行を開始すると、追尾判定部71は、ロスト判定が行なわれたか否かを判定する(S201)。追尾判定部71でロスト判定が行なわれると(S201:No)、飛行制御部35は飛行計画に沿った飛行を中止する(S202)。
Hereinafter, based on FIG. 4, the flow of processing in the flying
When the flying
そして、ロスト位置定義部72は、S201でロスト判定が行なわれた時刻T1を取得する(S203)。また、ロスト位置定義部72は、S202で飛行計画に沿った飛行を停止した時刻T2を取得する(S204)。さらに、ロスト位置定義部72は、S203で取得した時刻T1からS204で取得した時刻T2までの期間Tdにおける飛行装置11の飛行速度Vを取得する(S205)。ロスト位置定義部72は、測量部12で取得した飛行データ、または状態取得部34で取得した飛行装置11の加速度や角速度に基づいて、飛行速度Vを取得する。ロスト位置定義部72は、これら時刻T1、時刻T2および飛行速度Vに基づいて、時刻T1における飛行位置をロスト位置P0に定義する(S206)。停止制御部74は、S206で定義されたロスト位置P0に基づいて、飛行装置11を停止させる停止制御を行なう(S207)。
Then, the lost
飛行制御部35は、S207において停止制御に移行すると、飛行装置11の飛行位置を推定可能であるか否かを判定する(S208)。停止制御部74は、飛行位置が推定可能であると判定されたとき(S208:Yes)、GPSセンサ41で受信したGPS信号に基づいて飛行装置11をロスト位置P0に停止させる制御を行なう(S209)。一方、停止制御部74は、飛行位置が推定困難であると判定されたとき(S208:No)、内界センサの検出値に基づいて飛行装置11をロスト位置P0に停止させる制御を行なう(S210)。探索制御部73は、S209またはS210において停止制御が行なわれているとき、測量部12を駆動して再帰反射部材15を探索する(S211)。これにより、探索制御部73は、停止している飛行装置11を、ロスト位置P0を中心として探索する。
When the
第2実施形態では、ロスト位置定義部72は、時間の経過にともなう飛行装置11の移動も考慮してロスト位置P0を定義する。そして、停止制御部74は、飛行装置11を、移動を考慮したロスト位置P0に戻して停止させる。飛行装置11は、飛行を継続することによって、トラッキングロストが生じてからロスト判定がなされるまで、ロスト判定がなされてから飛行計画に沿った飛行を停止するまでの間に位置が変化するおそれがある。そこで、停止制御部74は、ロスト判定がなされたとき、飛行装置11の位置の変化を算出し、位置が変化した飛行装置11をロスト位置P0まで戻した上で停止させる。このように、ロスト判定がなされたとき、飛行装置11はロスト位置P0に復帰して停止するとともに、測量部12は探索制御部73によってロスト位置P0を中心とした飛行装置11の探索を行なう。これにより、飛行装置11は、測量部12によって速やかに探索される。したがって、トラッキングロストが生じたときでも、測量部12による飛行装置11の再追尾を容易にすることができる。
In the second embodiment, the lost
(第3実施形態)
第3実施形態による飛行装置誘導システムについて説明する。
第3実施形態による飛行装置誘導システム10は、構成が図1および図2に示す第1実施形態と共通する。第3実施形態による飛行装置誘導システム10の場合、通信部31は、追尾判定部71においてロスト判定が行なわれたとき、状態取得部34で取得した飛行装置11の飛行位置を、地上基地13を通して測量部12へ伝達する。すなわち、状態取得部34は、追尾判定部71においてロスト判定が行なわれると、そのときの飛行位置を取得する。そして、通信部31は、状態取得部34で取得された飛行位置を地上基地13へ送信する。測量部12を駆動する探索制御部73は、地上基地13を通して飛行装置11から取得した飛行位置を参照して、飛行装置11の再帰反射部材15を探索する。これにより、探索制御部73は、ロスト位置P0に加え、ロスト判定が行なわれたときの飛行装置11の飛行位置も参照して再帰反射部材15の探索を行なう。その結果、トラッキングロストが生じたときでも、測量部12による飛行装置11の再追尾がより容易になる。
(Third embodiment)
A flying device guidance system according to a third embodiment will be described.
The flying
以下、図5に基づいて第3実施形態による飛行装置誘導システム10における処理の流れを説明する。なお、第2実施形態と共通する処理については、説明を省略する。
飛行装置11が飛行を開始すると、追尾判定部71は、ロスト判定が行なわれたか否かを判定する(S301)。追尾判定部71でロスト判定が行なわれると(S301:No)、飛行制御部35は飛行計画に沿った飛行を中止する(S302)。そして、ロスト位置定義部72は、S301でロスト判定が行なわれた時刻T1を取得する(S303)。また、ロスト位置定義部72は、S302で飛行計画に沿った飛行を停止した時刻T2を取得する(S304)。さらに、ロスト位置定義部72は、S303で取得した時刻T1からS304で取得した時刻T2までの期間Tdにおける飛行装置11の飛行速度Vを取得する(S305)。ロスト位置定義部72は、これら時刻T1、時刻T2および飛行速度Vに基づいて、時刻T1における飛行位置をロスト位置P0に定義する(S306)。停止制御部74は、S306で定義されたロスト位置P0に基づいて、飛行装置11を停止させる停止制御を行なう(S307)。
Hereinafter, a flow of processing in the flying
When the flying
飛行制御部35は、S307において停止制御に移行すると、飛行装置11の飛行位置を推定可能であるか否かを判定する(S308)。停止制御部74は、飛行位置が推定可能であると判定されたとき(S308:Yes)、GPSセンサ41で受信したGPS信号に基づいて飛行装置11をロスト位置P0に停止させる制御を行なう(S309)。そして、通信部31は、GPSセンサ41で受信したGPS信号に基づく飛行装置11の飛行位置を地上基地13へ送信する(S310)。すなわち、状態取得部34は、GPSセンサ41で受信したGPS信号に基づいて飛行装置11の飛行位置を取得する。通信部31は、状態取得部34で取得した飛行装置11の飛行位置を地上基地13へ送信する。
When the
一方、停止制御部74は、飛行位置が推定困難であると判定されたとき(S308:No)、内界センサの検出値に基づいて飛行装置11をロスト位置P0に停止させる制御を行なう(S311)。探索制御部73は、S309またはS310において停止制御が行なわれているとき、測量部12を駆動して再帰反射部材15を探索する(S311)。このとき、探索制御部73は、S310において通信部31から送信された飛行装置11の飛行位置も参照して再帰反射部材15を探索する。これにより、探索制御部73は、停止している飛行装置11を、ロスト位置P0を中心とした最新の飛行位置も用いて探索する。
On the other hand, when it is determined that the flight position is difficult to estimate (S308: No), the
第3実施形態では、通信部31は、追尾判定部71において追尾が維持できていないとき、つまりトラッキングロストによるロスト判定がなされたとき、状態取得部34で取得した飛行装置11の飛行位置を、地上基地13を通して測量部12へ伝達する。そして、探索制御部73は、ロスト判定がなされたとき、ロスト位置P0に加え、伝達された飛行装置11の飛行位置を中心に飛行装置11に設けられている再帰反射部材15を探索する。このように、ロスト判定がなされたとき、飛行装置11は飛行位置を測量部12に伝達するとともに、測量部12は探索制御部73によって飛行装置11から伝達された飛行位置を中心として飛行装置11の探索を行なう。これにより、飛行装置11は、測量部12によって速やかに探索される。したがって、トラッキングロストが生じたときでも、測量部12による飛行装置11の再追尾をより容易にすることができる。
In the third embodiment, the
(第3実施形態の変形例)
第3実施形態では、通信部31は、状態取得部34で取得された飛行位置のうち、GPSセンサ41で取得したGPS信号に基づく飛行装置11の飛行位置を送信する例について説明した。ここで、通信部31は、GPS信号に基づく飛行装置11の飛行位置だけでなく、内界センサである加速度センサ42、角速度センサ43および地磁気センサ44の検出値に基づく飛行位置を地上基地13へ送信してもよい。
(Modification of the third embodiment)
In 3rd Embodiment, the
以下、図6に基づいて第3実施形態の変形例による飛行装置誘導システム10における処理の流れを説明する。なお、第3実施形態と共通する処理については、説明を省略する。
S401からS411までの処理は、図5に示す第3実施形態におけるS301からSS311までの処理と共通である。第4実施形態の場合、停止制御部74は、飛行位置が推定困難であると判定されたとき(S408:No)、内界センサの検出値に基づいて飛行装置11をロスト位置P0に停止させる制御を行なう(S411)。そして、通信部31は、内界センサで検出した検出値に基づく飛行装置11の飛行位置を地上基地13へ送信する(S412)。すなわち、状態取得部34は、加速度センサ42、角速度センサ43および地磁気センサ44などの内界センサで検出した検出値に基づいて飛行装置11の飛行位置を取得する。通信部31は、状態取得部34の内界センサで取得した飛行装置11の飛行位置を地上基地13へ送信する。
Hereinafter, the flow of processing in the flying
The processing from S401 to S411 is common to the processing from S301 to SS311 in the third embodiment shown in FIG. In the case of the fourth embodiment, when it is determined that the flight position is difficult to estimate (S408: No), the
探索制御部73は、S409またはS411において停止制御が行なわれているとき、測量部12を駆動して再帰反射部材15を探索する(S413)。このとき、探索制御部73は、S410またはS412において通信部31から送信された飛行装置11の飛行位置も参照して再帰反射部材15を探索する。これにより、探索制御部73は、停止している飛行装置11を、ロスト位置P0を中心とした最新の飛行位置も用いて探索する。したがって、トラッキングロストが生じたときでも、測量部12による飛行装置11の再追尾をより容易にすることができる。
When the stop control is being performed in S409 or S411, the
(トラッキングロストからの復帰処理)
上述の第1実施形態から第3実施形態においてトラッキングロストが生じた後、測量部12による飛行装置11の追尾が復帰するまでの復帰処理について説明する。この復帰処理は、第1実施形態から第3実施形態による再帰反射部材15の探索(S108、S211、S312、S413)の後に実行される。復帰処理は、飛行装置11または地上基地13に設けられている図示しない復帰制御部によって実行される。この復帰制御部は、飛行装置11の制御演算部32または地上基地13の制御演算部61によってコンピュータプログラムを実行することにより、ソフトウェア的に実現されている。なお、復帰制御部は、ハードウェア的、またはソフトウェアとハードウェアとの協働によって実現してもよい。
(Return processing from tracking lost)
A return process until tracking of the flying
以下、復帰処理の流れを図7に基づいて説明する。
復帰制御部は、飛行装置11の追尾が再開されたか否かを判定する(S501)。すなわち、復帰制御部は、追尾判定部71を通して測量部12による飛行装置11のトラッキングロストが解消され、測量部12による飛行装置11の追尾が再開されたか否かを判定する。復帰制御部は、飛行装置11の追尾が再開されると(S501:Yes)、GPS信号を利用可能であるか否かを判定する(S502)。すなわち、復帰制御部は、GPSセンサ41でGPS信号を受信し、受信したGPS信号に基づいて飛行装置11の飛行位置を推定可能であるか否かを判定する。
Hereinafter, the flow of the return process will be described with reference to FIG.
The return control unit determines whether tracking of the flying
復帰制御部は、GPS信号を利用可能であると判定すると(S502:Yes)、GPS信号に基づく飛行装置11の飛行位置を取得するとともに(S503)、測量部12により飛行装置11の飛行データを取得する(S504)。そして、復帰制御部は、これらGPS信号に基づく飛行位置と飛行データとの差分を算出する(S505)。すなわち、復帰制御部は、飛行装置11の状態取得部34からGPS信号を取得し、このGPS信号に基づいて飛行装置11の飛行位置を取得する。これとともに、復帰制御部は、飛行装置11を追尾する測量部12により飛行データを取得する。復帰制御部は、これらGPS信号に基づく飛行位置と測量部12で取得した飛行データとの差分を算出する。
When the return control unit determines that the GPS signal can be used (S502: Yes), it acquires the flight position of the flying
復帰制御部は、S505で算出した差分が予め設定した設定範囲内であるか否かを判定する(S506)。復帰制御部は、S506において差分が設定範囲内であると判定すると(S506:Yes)、飛行装置11の制御モードを自動制御モードに変更する(S507)。すなわち、復帰制御部は、差分が設定範囲内であるとき、測量部12による飛行装置11の追尾が遠隔操作可能な程度に復帰したと判定し、自動制御モードによる飛行に変更する。これにより、飛行装置11の飛行制御部35は、自動操作モードによる飛行装置11の制御へ移行する。その結果、飛行装置11は、地上基地13からの送信データを参考にして自立的に飛行する。ここで、設定範囲は、飛行装置11をはじめとする飛行装置誘導システム10の性能に応じて任意に設定することができる。
The return control unit determines whether or not the difference calculated in S505 is within a preset setting range (S506). When the return control unit determines in S506 that the difference is within the set range (S506: Yes), the return control unit changes the control mode of the flying
一方、復帰制御部は、S502においてGPS信号を利用できない(S502:No)、またはS506において差分が設定範囲外であると判定すると(S506:No)、飛行装置11の飛行において許容される速度および加速度を制限する(S508)。すなわち、復帰制御部は、GPS信号が利用できない、または差分が設定範囲外のとき、飛行装置11の速度および加速度の最大値を低下させる。この場合、復帰制御部は、飛行装置11の速度および加速度の最大値のいずれか一方だけを低下させてもよく、双方を低下させてもよい。復帰制御部は、このように飛行装置11に許容する速度および加速度の最大値を低下した状態で飛行装置11の制御モードを自動制御モードに変更する(S509)。これにより、飛行装置11の飛行制御部35は、速度および加速度の最大値を低下した状態で自動制御モードによる飛行装置11の制御へ移行する。その結果、飛行装置11は、速度および加速度が制限された状態で自立的に飛行する。
On the other hand, when the return control unit determines that the GPS signal cannot be used in S502 (S502: No), or the difference is outside the set range in S506 (S506: No), the speed allowed in the flight of the flying
測量部12が飛行装置11を追尾しているとき、GPS信号に基づく飛行位置と測量部12で取得した飛行データとは一致または差分が小さくなる。すなわち、測量部12が飛行装置11を追尾しているとき、飛行装置11は測量部12によって捕捉されている。そのため、GPS信号に基づく飛行位置と測量部12で取得した飛行データとの間には、大きなずれが生じていないと考えられる。一方、GPS信号を用いることができないとき、測量部12が飛行装置11を追尾していても、測量部12で把握する飛行データと飛行装置11の実際の飛行位置とが一致しているか否かを判定できない。すなわち、測量部12が確実に飛行装置11を追尾しているか否かは判定できない。同様に、飛行位置と飛行データとの差分が設定範囲外のときも、測量部12が確実に飛行装置11を追尾しているか否かは判定できない。その結果、飛行装置11に大きな機動、つまり高速での飛行や高加速度での飛行位置の変化が生じると、測量部12は容易に飛行装置11を見失う、つまりトラッキングロストを生じるおそれがある。そこで、復帰制御部は、GPS信号を用いることができない、または飛行位置と飛行データとの差分が設定範囲外のとき、飛行装置11に許容される速度および加速度の最大値を低下させる。これにより、飛行装置11は短時間で大きな機動を生じることがない。したがって、自動制御モードに移行しても、測量部12はトラッキングロストを低減することができる。
When the surveying
以上説明した本発明は、上記実施形態に限定されるものではなく、その要旨を逸脱しない範囲で種々の実施形態に適用可能である。
例えば、上記の複数の実施形態の場合、飛行装置11はGPS信号を受信するGPSセンサ41を有する例について説明した。しかし、飛行装置11は、GPSセンサ41を有していなくてもよい。この場合、飛行装置11は、外界センサであるGPSセンサ41を使用できない。このことから、停止制御部74は、複数の実施形態で説明したように内界センサである加速度センサ42、角速度センサ43および地磁気センサ44を用いて停止制御を行なうことができる。
The present invention described above is not limited to the above-described embodiment, and can be applied to various embodiments without departing from the gist thereof.
For example, in the case of the above embodiments, the flying
本開示は、実施例に準拠して記述されたが、本開示は当該実施例や構造に限定されるものではないと理解される。本開示は、様々な変形例や均等範囲内の変形をも包含する。加えて、様々な組み合わせや形態、さらには、それらに一要素のみ、それ以上、あるいはそれ以下、を含む他の組み合わせや形態をも、本開示の範疇や思想範囲に入るものである。 Although the present disclosure has been described with reference to the embodiments, it is understood that the present disclosure is not limited to the embodiments and structures. The present disclosure includes various modifications and modifications within the equivalent range. In addition, various combinations and forms, as well as other combinations and forms including only one element, more or less, are within the scope and spirit of the present disclosure.
図面中、10は飛行装置誘導システム、11は飛行装置、12は測量部、13は地上基地、15は再帰反射部材、31は通信部、34は状態取得部(位置取得部)、35は飛行制御部、71は追尾判定部、72はロスト位置定義部、73は探索制御部、74は停止制御部を示す。 In the drawings, 10 is a flying device guidance system, 11 is a flying device, 12 is a surveying unit, 13 is a ground base, 15 is a retroreflective member, 31 is a communication unit, 34 is a state acquisition unit (position acquisition unit), and 35 is a flight. A control unit, 71 is a tracking determination unit, 72 is a lost position definition unit, 73 is a search control unit, and 74 is a stop control unit.
Claims (5)
前記飛行装置(11)へ光を照射するとともに、前記再帰反射部材(15)で反射した光から、前記飛行装置(11)を追尾して、前記飛行装置(11)までの距離および前記飛行装置(11)の飛行角度を飛行データとして取得する測量部(12)と、
前記測量部(12)で取得した飛行データに基づいて、前記飛行装置(11)の飛行を制御する地上基地(13)と、を備える飛行装置誘導システムにおいて、
前記飛行装置(11)の飛行中に、前記測量部(12)が前記再帰反射部材(15)の追尾を維持しているか否かを判定する追尾判定部(71)と、
前記追尾判定部(71)において前記再帰反射部材(15)の追尾が維持されていないロスト判定がされたとき、前記ロスト判定がなされた前記飛行装置(11)の飛行位置をロスト位置と定義するロスト位置定義部(72)と、
前記ロスト判定がされたとき、前記測量部(12)を駆動して、前記ロスト位置を中心に前記再帰反射部材(15)を探索する探索制御部(73)と、
前記ロスト判定がされたとき、前記飛行装置(11)の飛行にともなう移動を停止し、前記飛行装置(11)をその場に停止する制御を行なう停止制御部(74)と、
を備える飛行装置誘導システム。 A flying device (11) having a retroreflective member (15) for reflecting light to the irradiation source;
While irradiating light to the flying device (11) and tracking the flying device (11) from the light reflected by the retroreflective member (15), the distance to the flying device (11) and the flying device A surveying unit (12) for acquiring the flight angle of (11) as flight data;
In a flying device guidance system comprising: a ground base (13) that controls flight of the flying device (11) based on flight data acquired by the surveying unit (12);
A tracking determination unit (71) for determining whether the surveying unit (12) maintains tracking of the retroreflective member (15) during the flight of the flying device (11);
When the tracking determination unit (71) makes a lost determination that the tracking of the retroreflective member (15) is not maintained, the flight position of the flying device (11) for which the lost determination has been made is defined as a lost position. A lost position definition section (72);
A search control unit (73) for driving the surveying unit (12) to search for the retroreflective member (15) around the lost position when the lost determination is made;
A stop control unit (74) for controlling the stop of the flying device (11) on the spot by stopping the movement of the flying device (11) when the lost determination is made;
A flying device guidance system comprising:
前記飛行装置(11)へ光を照射するとともに、前記再帰反射部材(15)で反射した光から、前記飛行装置(11)を追尾して、前記飛行装置(11)までの距離および前記飛行装置(11)の飛行角度を飛行データとして取得する測量部(12)と、
前記測量部(12)で取得した飛行データに基づいて、前記飛行装置(11)の飛行を制御する地上基地(13)と、を備える飛行装置誘導システムにおいて、
前記飛行装置(11)の飛行中に、前記測量部(12)が前記再帰反射部材(15)の追尾を維持しているか否かを判定する追尾判定部(71)と、
前記追尾判定部(71)において前記再帰反射部材(15)の追尾が維持されていないロスト判定がされたとき、前記ロスト判定がなされた位置をロスト位置と定義するロスト位置定義部(72)と、
前記ロスト判定がされたとき、前記測量部(12)を駆動して、前記ロスト位置を中心に前記再帰反射部材(15)を探索する探索制御部(73)と、
前記ロスト判定がされたとき、前記飛行装置(11)の飛行にともなう移動を停止し、前記ロスト判定がされた前記飛行装置(11)を、前記ロスト位置に戻して停止する制御を行なう停止制御部(74)と、
を備える飛行装置誘導システム。 A flying device (11) having a retroreflective member (15) for reflecting light to the irradiation source;
While irradiating light to the flying device (11) and tracking the flying device (11) from the light reflected by the retroreflective member (15), the distance to the flying device (11) and the flying device A surveying unit (12) for acquiring the flight angle of (11) as flight data;
In a flying device guidance system comprising: a ground base (13) that controls flight of the flying device (11) based on flight data acquired by the surveying unit (12);
A tracking determination unit (71) for determining whether the surveying unit (12) maintains tracking of the retroreflective member (15) during the flight of the flying device (11);
A lost position defining unit (72) for defining a position where the lost determination is made as a lost position when the tracking determination unit (71) makes a lost determination that the tracking of the retroreflective member (15) is not maintained; ,
A search control unit (73) for driving the surveying unit (12) to search for the retroreflective member (15) around the lost position when the lost determination is made;
When the lost determination is made, stop control is performed to stop the movement of the flying device (11) along with the flight and return the lost flying device (11) to the lost position and stop the flying device (11). Part (74);
A flying device guidance system comprising:
前記飛行装置(11)に設けられ、前記ロスト判定がされたとき、前記位置取得部(34)で取得した前記飛行位置に基づいて飛行を制御する位置制御部(35)と、
をさらに備える請求項1または2記載の飛行装置誘導システム。 A position acquisition unit (34) provided in the flying device (11) for independently acquiring its own flight position;
A position control unit (35) that is provided in the flight device (11) and controls flight based on the flight position acquired by the position acquisition unit (34) when the lost determination is made;
The flying device guidance system according to claim 1, further comprising:
前記飛行装置(11)へ光を照射するとともに、前記再帰反射部材(15)で反射した光から、前記飛行装置(11)を追尾して、前記飛行装置(11)までの距離および前記飛行装置(11)の飛行角度を飛行データとして取得する測量部(12)と、
前記測量部(12)で取得した飛行データに基づいて、前記飛行装置(11)の飛行を制御する地上基地(13)と、を備える飛行装置誘導システムにおいて、
前記飛行装置(11)に設けられ、自身の飛行位置を自立的に取得する位置取得部(34)と、
前記飛行装置(11)の飛行中に、前記測量部(12)が前記再帰反射部材(15)の追尾を維持しているか否かを判定する追尾判定部(71)と、
前記追尾判定部(71)において前記再帰反射部材(15)の追尾が維持されていないロスト判定がされたとき、前記位置取得部(34)で取得した前記飛行位置を前記測量部(12)へ伝達する通信部(31)と、
前記測量部(12)を駆動して、前記通信部(31)を通して前記測量部(12)へ伝達された前記飛行位置を中心に前記再帰反射部材(15)を探索する探索制御部(73)と、
を備える飛行装置誘導システム。 A flying device (11) having a retroreflective member (15) for reflecting light to the irradiation source;
While irradiating light to the flying device (11) and tracking the flying device (11) from the light reflected by the retroreflective member (15), the distance to the flying device (11) and the flying device A surveying unit (12) for acquiring the flight angle of (11) as flight data;
In a flying device guidance system comprising: a ground base (13) that controls flight of the flying device (11) based on flight data acquired by the surveying unit (12);
A position acquisition unit (34) provided in the flying device (11) for independently acquiring its own flight position;
A tracking determination unit (71) for determining whether the surveying unit (12) maintains tracking of the retroreflective member (15) during the flight of the flying device (11);
When the tracking determination unit (71) performs a lost determination that the tracking of the retroreflective member (15) is not maintained, the flight position acquired by the position acquisition unit (34) is sent to the surveying unit (12). A communication unit (31) for transmitting;
A search control unit (73) for driving the surveying unit (12) to search for the retroreflective member (15) around the flight position transmitted to the surveying unit (12) through the communication unit (31). When,
A flying device guidance system comprising:
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018092203A JP2019197475A (en) | 2018-05-11 | 2018-05-11 | Flight device guide system |
| PCT/JP2019/014969 WO2019194277A1 (en) | 2018-04-05 | 2019-04-04 | Flying device and flying device guidance system |
| US17/060,414 US20210026375A1 (en) | 2018-04-05 | 2020-10-01 | Aircraft and aircraft guidance system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018092203A JP2019197475A (en) | 2018-05-11 | 2018-05-11 | Flight device guide system |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019197475A true JP2019197475A (en) | 2019-11-14 |
| JP2019197475A5 JP2019197475A5 (en) | 2020-07-30 |
Family
ID=68537961
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018092203A Pending JP2019197475A (en) | 2018-04-05 | 2018-05-11 | Flight device guide system |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2019197475A (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021100152A1 (en) * | 2019-11-20 | 2021-05-27 | 日本電気株式会社 | Moving body control system, moving body control device, and moving body control method |
| JP2022185210A (en) * | 2021-06-02 | 2022-12-14 | 空撮サービス株式会社 | Unmanned aerial vehicle position measurement system, and position measurement method |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7421396B2 (en) | 2020-03-27 | 2024-01-24 | 株式会社Nttデータ | Autonomous flying vehicle and flight control method |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006284385A (en) * | 2005-03-31 | 2006-10-19 | Nec Toshiba Space Systems Ltd | Reference station system for gps satellite |
| JP2017151008A (en) * | 2016-02-26 | 2017-08-31 | 株式会社トプコン | Flight vehicle tracking method, flight vehicle image acquisition method, flight vehicle display method, and flight vehicle guide system |
| JP2017173254A (en) * | 2016-03-25 | 2017-09-28 | 東京電力ホールディングス株式会社 | Radiation dosimetry device |
-
2018
- 2018-05-11 JP JP2018092203A patent/JP2019197475A/en active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006284385A (en) * | 2005-03-31 | 2006-10-19 | Nec Toshiba Space Systems Ltd | Reference station system for gps satellite |
| JP2017151008A (en) * | 2016-02-26 | 2017-08-31 | 株式会社トプコン | Flight vehicle tracking method, flight vehicle image acquisition method, flight vehicle display method, and flight vehicle guide system |
| JP2017173254A (en) * | 2016-03-25 | 2017-09-28 | 東京電力ホールディングス株式会社 | Radiation dosimetry device |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021100152A1 (en) * | 2019-11-20 | 2021-05-27 | 日本電気株式会社 | Moving body control system, moving body control device, and moving body control method |
| JPWO2021100152A1 (en) * | 2019-11-20 | 2021-05-27 | ||
| JP2022185210A (en) * | 2021-06-02 | 2022-12-14 | 空撮サービス株式会社 | Unmanned aerial vehicle position measurement system, and position measurement method |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2018218516A1 (en) | Unmanned aerial vehicle return route planning method and apparatus | |
| JP5882951B2 (en) | Aircraft guidance system and aircraft guidance method | |
| JP6235213B2 (en) | Autonomous flying robot | |
| JP6682381B2 (en) | Unmanned aerial vehicle, flight control method and flight control program | |
| US11714406B2 (en) | Method, device, and unmanned aerial vehicle for controlling movable object | |
| US20190346562A1 (en) | Systems and methods for radar control on unmanned movable platforms | |
| CN111295627B (en) | Underwater piloting unmanned aerial vehicle system | |
| JP2019197475A (en) | Flight device guide system | |
| JP6527726B2 (en) | Autonomous mobile robot | |
| JP6509599B2 (en) | Flight robot control system and flight robot | |
| JP7123774B2 (en) | flight control system | |
| JP6831274B2 (en) | Flight equipment | |
| JP2017182692A (en) | Autonomous Mobile Robot | |
| JP2019064280A (en) | Flight device | |
| KR101758453B1 (en) | Unmanned aerial vehicle and flying method of the same | |
| JP2020118641A (en) | Multi-copter | |
| US20210034052A1 (en) | Information processing device, instruction method for prompting information, program, and recording medium | |
| JP2009080527A (en) | Autonomous mobile device | |
| JP6469492B2 (en) | Autonomous mobile robot | |
| CN117836737A (en) | Unmanned aerial vehicle return method and device, unmanned aerial vehicle, remote control equipment, system and storage medium | |
| JP2016181178A (en) | Autonomous mobile robot | |
| JP5314788B2 (en) | Autonomous mobile device | |
| JP6946865B2 (en) | Navigation control device and navigation control method | |
| WO2019194277A1 (en) | Flying device and flying device guidance system | |
| JP7450431B2 (en) | Autonomous flying vehicle and flight control method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200615 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200615 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210323 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20211005 |