JP2019164109A - 計測装置、計測システム、計測方法およびプログラム - Google Patents
計測装置、計測システム、計測方法およびプログラム Download PDFInfo
- Publication number
- JP2019164109A JP2019164109A JP2018092316A JP2018092316A JP2019164109A JP 2019164109 A JP2019164109 A JP 2019164109A JP 2018092316 A JP2018092316 A JP 2018092316A JP 2018092316 A JP2018092316 A JP 2018092316A JP 2019164109 A JP2019164109 A JP 2019164109A
- Authority
- JP
- Japan
- Prior art keywords
- unit
- data
- measurement
- partial
- space
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images
















Abstract
Description
(計測支援システムの全体構成)
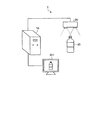
図1は、第1の実施形態に係る計測支援システムの全体構成の一例を示す図である。図1を参照しながら、本実施形態に係る計測支援システム1の全体構成について説明する。
図2は、第1の実施形態に係る計測支援装置のハードウェア構成の一例を示す図である。図2を参照しながら、本実施形態に係る計測支援装置のハードウェア構成について説明する。
図3は、第1の実施形態に係る計測支援装置の機能ブロックの構成の一例を示す図である。図4は、第1の実施形態において座標空間を複数の部分空間に分割した例を示す図である。図5は、第1の実施形態において計測対象物に対する三次元計測物について部分領域ごとに色分け表示した例を示す図である。図6は、第1の実施形態において計測対象物に対する三次元計測物について部分領域ごとの評価値のグラフを表示した例を示す図である。図3〜図6を参照しながら、本実施形態に係る計測支援装置10の機能ブロックの構成および動作について説明する。
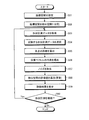
図7は、第1の実施形態に係る計測支援装置の処理の一例を示すフローチャートである。図7を参照しながら、本実施形態に係る計測支援装置10の処理の流れについて説明する。
計測支援装置10の座標系設定部201は、例えば、予め定められている基準点に基づいて、三次元座標空間を設定(構築)する。なお、三次元座標空間を設定するのに用いる基準点としては、計測者が計測支援装置10に対して明示的に指定操作してもよく、計測対象物30のおおまかな形状が既知であれば事前に設定された点を用いるものとしてもよい。また、基準点としては、計測対象物30の形状を特徴付ける点を用いることが望ましい。例えば、計測対象物30が円錐であれば、頂点、または底面の直径が円周と交わる交点等が挙げられる。また、計測対象物30が乗用車であれば、フロントバンパーまたはリアバンパーの中央、または左右のミラーの端部等が挙げられる。また、計測対象物30が対称性に乏しい物体であれば、基準点として、計測対象物30の中心または重心近傍の点を用いるものとすればよい。そして、ステップS12へ移行する。
計測支援装置10の空間分割部202は、座標系設定部201により設定された三次元座標空間を複数の部分空間に分割する。そして、ステップS13へ移行する。
計測支援装置10の取得部203は、三次元計測器20により計測された計測対象物30の形状計測データを取得する。そして、ステップS14へ移行する。
計測支援装置10の判定部204は、取得部203により取得された計測対象物30の形状計測データ(点データ)で構成される三次元計測物の各部分(各領域)が、三次元座標空間のどの部分空間に属するかを判定する。このように、判定部204によって三次元計測物の各部分がどの部分空間に属するかが判定されることによって、三次元計測物は各部分領域に分けられることになる。
計測支援装置10の表示制御部207は、取得部203により取得された形状計測データにより構成される三次元計測物を、表示部208に表示させる。このとき、表示制御部207は、三次元計測物の各部分領域に対応する部分空間の評価値に基づいて、計測者が直感的に把握しやすい視覚的表現により当該三次元計測物を表示(評価結果の表示)させる。例えば、表示制御部207は、各部分空間の評価値の高低に基づいて、当該各部分空間に属する三次元計測物の部分領域を異なる色で塗り分けて表示させる。そして、ステップS16へ移行する。
計測者は、表示部208に表示された評価値の視覚的表現に基づいて、計測対象物において、次に計測すべき位置および方向を判断する。計測者が形状計測の継続が必要と判断した場合(ステップS16:Yes)、ステップS13へ戻り、三次元計測器20を用いて計測対象物30の表面形状の形状計測を行い、取得部203は、三次元計測器20により計測された計測対象物30の形状計測データを新たに取得する。このように、ステップS13〜S16の処理が繰り返されることによって、各部分空間に含まれる形状計測データの量に基づく評価値が更新されていき、その更新された評価値に基づいて、対応する部分領域の表示態様も更新されていく。
本変形例では、既に取得された形状計測データに基づいて、三次元座標空間を設定(構築)するための座標軸を自動で決定する動作について説明する。
計測支援装置10の座標系設定部201は、まず、予め定められている基準点に基づいて、初期の三次元座標空間を設定(構築)する。後述するように、座標系設定部201により新たに三次元座標空間が設定されるまでは、初期の三次元座標空間に基づいて、ステップS11〜S16が繰り返される。
上述の第1の実施形態で説明した内容と同様である。そして、ステップS16へ移行する。
計測者は、表示部208に表示された評価値の視覚的表現に基づいて、計測対象物において、次に計測すべき位置および方向を判断する。計測者が形状計測の継続が必要と判断した場合(ステップS16:Yes)、ステップS11へ戻る。なお、上述のようにステップS11において既に三次元座標空間の再設定が済んでいる場合、ステップS13へ戻るものとしてもよい。一方、計測者が形状計測が十分に行われたと判断した場合(ステップS16:No)、形状計測を終了する。
第2の実施形態に係る計測支援装置10について、第1の実施形態に係る計測支援装置10と相違する点を中心に説明する。第1の実施形態では、計測の対象となる計測対象物がどのようなものであるか特に限定せずに説明した。本実施形態では、計測対象物としての人間の頭部について形状計測を行う場合の動作について説明する。人間の頭部について形状計測が行われた三次元計測物は、例えば、医療分野(脳磁計等)での利用が想定される。なお、本実施形態に係る計測支援システム1の全体構成、計測支援装置10のハードウェア構成および機能ブロック構成については、第1の実施形態で説明した構成と同様である。また、本実施形態では、三次元計測器20としてデジタイザを用いた場合を例に説明する。
図9は、第2の実施形態における頭部の基準点の設定の一例を示す図である。図10は、第2の実施形態において座標空間を複数の部分空間に分割した例を示す図である。図11は、第2の実施形態において計測対象物に対する三次元計測物について部分領域ごとに色分け表示した例を示す図である。図9〜図11を参照しながら、本実施形態に係る計測支援装置10の機能ブロックの動作について説明する。
本変形例では、評価値の表示の際に、三次元計測物を二次元に射影して表示する動作について説明する。
第3の実施形態に係る計測支援装置について、第1の実施形態に係る計測支援装置10と相違する点を中心に説明する。第1の実施形態では、計測された形状計測データについて混入されるノイズについては特に言及せずに動作を説明した。実際には、三次元計測器により計測された形状計測データには、後述するような要因からノイズが混入する場合がある。本実施形態では、ノイズが混入した形状計測データを除去した上で、処理を行う動作を説明する。なお、本実施形態に係る計測支援システムの全体構成、計測支援装置のハードウェア構成については、第1の実施形態で説明した構成と同様である。
三次元計測器20を用いて計測対象物の表面形状を計測する際には、以下の(要因1)〜(要因3)のような要因から本来必要としていない形状計測データが得られることがある。
(要因2)計測対象物とは異なる物体の映り込み
(要因3)計測対象物の一部ではあるが、注目領域とは異なる領域の映り込み
図13は、第3の実施形態に係る計測支援装置の機能ブロックの構成の一例を示す図である。図14は、第3の実施形態におけるベクトルの設定およびノイズの判定の一例を示す図である。図13および図14を参照しながら、本実施形態に係る計測支援装置10aの機能ブロックの構成および動作について説明する。

図15は、第3の実施形態に係る計測支援装置の処理の一例を示すフローチャートである。図15を参照しながら、本実施形態に係る計測支援装置10aの処理の流れについて説明する。
ステップS31〜S33の処理は、それぞれ、図7で説明したステップS11〜S13の動作と同様である。ステップS33の処理後、ステップS34へ移行する。
計測支援装置10aのノイズ除去部209の選択部209aは、取得部203により取得された形状計測データのうち、時間的または空間的に近接する任意の2つの形状計測データを選択する。そして、ステップS35へ移行する。
計測支援装置10aのノイズ除去部209の設定部209bは、形状計測データである2つの点の変位ベクトル、および、原点と、当該2つの点のうちのいずれかの点とで定まる位置ベクトルを設定する。そして、ステップS36へ移行する。
計測支援装置10aのノイズ除去部209の角度判定部209cは、設定部209bで設定された2つのベクトル(変位ベクトルおよび位置ベクトル)のなす角度θが、所定条件を満たすか否かを判定する。例えば、角度判定部209cは、2つのベクトルのなす角度θについて|θ−90|が所定の閾値を超えたか否かを判定する。そして、ステップS37へ移行する。
計測支援装置10aのノイズ除去部209の除去部209dは、角度判定部209cにより所定条件を満たさないと判定された場合、選択部209aで選択された2つの形状計測データのうち少なくとも1つの形状計測データにノイズが混入されていると判断し、当該形状計測データをノイズとして除去する。ステップS34〜S37の処理が、取得部203により取得された形状計測データのすべてに対して実施された後、ステップS38へ移行する。
ステップS38〜S40の処理は、それぞれ、図7で説明したステップS14〜S16の動作と同様である。
例えば、計測対象物の表面形状が滑らかであれば、連続する形状計測データ間の変位ベクトルがなす角度は小さいことが期待される。本変形例では、上述の第3の方法を用いたノイズの除去処理として、連続する形状計測データ間の変位ベクトルのなす角度に基づいてノイズの混入を判定する動作について説明する。
図16は、第3の実施形態の変形例1におけるベクトルの設定およびノイズの判定の一例を示す図である。図16を参照しながら、本実施形態に係る計測支援装置10aの機能ブロックの動作について説明する。なお、本変形例に係る計測支援装置10aの機能ブロックの構成は、上述の図13で説明した構成と同様である。図13に示した機能ブロックのうち、上述の第3の実施形態に係る計測支援装置10aの機能ブロックの動作と異なる動作を中心に説明する。
本変形例に係る計測支援装置10aの処理の流れについて、上述の図15に示すフローチャートを参照しながら説明する。
ステップS31〜S33の処理は、それぞれ、図7で説明したステップS11〜S13の動作と同様である。ステップS33の処理後、ステップS34へ移行する。
計測支援装置10aのノイズ除去部209の選択部209aは、取得部203により取得された形状計測データのうち、時間的または空間的に近接する任意の3つの形状計測データを選択する。そして、ステップS35へ移行する。
計測支援装置10aのノイズ除去部209の設定部209bは、形状計測データである3つの点のうち、任意の2つの形状計測データを2組選択して、それぞれの組の点で定まる2つの変位ベクトルを設定する。そして、ステップS36へ移行する。
計測支援装置10aのノイズ除去部209の角度判定部209cは、設定部209bで設定された2つの変位ベクトルのなす角度θが、所定条件を満たすか否かを判定する。例えば、角度判定部209cは、2つのベクトルのなす角度θについて|sinθ|が所定の閾値を超えたか否かを判定する。そして、ステップS37へ移行する。
計測支援装置10aのノイズ除去部209の除去部209dは、角度判定部209cにより所定条件を満たさないと判定された場合、選択部209aにより選択された3つの形状計測データのうち少なくとも1つの形状計測データにノイズが混入されていると判断し、当該形状計測データをノイズとして除去する。ステップS34〜S37の処理が、取得部203により取得された形状計測データのすべてに対して実施された後、ステップS38へ移行する。
ステップS38〜S40の処理は、それぞれ、図7で説明したステップS14〜S16の動作と同様である。
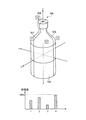
例えば、計測対象物が球に近い形状であれば、特定の形状計測データである点の原点からの距離、すなわち、位置ベクトルの長さが、他の位置ベクトルの長さと比較して差が小さいことが期待される。本変形例では、上述の第3の方法を用いたノイズの除去処理として、形状計測データの位置ベクトルの長さに基づいてノイズの混入を判定する動作について説明する。
図17は、第3の実施形態の変形例2に係る計測支援装置の機能ブロックの構成の一例を示す図である。図18は、第3の実施形態の変形例2におけるベクトルの設定およびノイズの判定の一例を示す図である。図17および図18を参照しながら、本変形例に係る計測支援装置10bの機能ブロックの構成および動作について説明する。
図19は、第3の実施形態の変形例2に係る計測支援装置の処理の一例を示すフローチャートである。図19を参照しながら、本変形例に係る計測支援装置10bの処理の流れについて説明する。
ステップS51〜S53の処理は、それぞれ、図7で説明したステップS11〜S13の動作と同様である。ステップS53の処理後、ステップS54へ移行する。
計測支援装置10bのノイズ除去部210の選択部210aは、取得部203により取得された形状計測データのうち、時間的または空間的に近接する任意の複数の形状計測データを選択する。そして、ステップS55へ移行する。
計測支援装置10bのノイズ除去部210の距離算出部210bは、選択部210aにより選択された各形状計測データである点と、原点(例えば、計測対象物30が球である場合の中心点等)との距離(各点の位置ベクトルの長さ)を算出する。そして、ステップS56へ移行する。
計測支援装置10bのノイズ除去部210の代表導出部210cは、距離算出部210bにより算出された各形状計測データである点と原点との距離から、代表的な距離を導出する。代表的な距離の導出方法は、上述した通りである。そして、ステップS57へ移行する。
計測支援装置10bのノイズ除去部210の距離判定部210dは、距離算出部210bにより算出された各距離と、代表導出部210cにより導出された代表的な距離との差が、所定条件を満たすか否かを判定する。例えば、距離判定部210dは、上述の差が所定の閾値を超えたか否かを判定する。そして、計測支援装置10bのノイズ除去部210の除去部210eは、距離判定部210dにより所定条件を満たさないと判定された形状計測データにノイズが混入されていると判断し、当該形状計測データをノイズとして除去する。ステップS54〜S57の処理が、取得部203により取得された形状計測データのすべてに対して実施された後、ステップS58へ移行する。
ステップS58〜S60の処理は、それぞれ、図7で説明したステップS14〜S16の動作と同様である。
10、10a、10b 計測支援装置
20 三次元計測器
30 計測対象物
30a、30b 三次元計測物
31a、32a 三次元計測物
33a 計測物
101 CPU
102 RAM
103 ROM
104 補助記憶装置
105 外部接続I/F
106 入力装置
107 表示装置
108 バス
201 座標系設定部
202 空間分割部
203 取得部
204 判定部
205 評価値算出部
206 入力部
207 表示制御部
208 表示部
209 ノイズ除去部
209a 選択部
209b 設定部
209c 角度判定部
209d 除去部
210 ノイズ除去部
210a 選択部
210b 距離算出部
210c 代表導出部
210d 距離判定部
210e 除去部
401〜404 部分空間
411〜418 部分空間
501〜504 部分領域
511〜514 部分領域
Claims (20)
- 計測対象物の表面の位置座標を示すデータを取得する取得部と、
前記データが、座標空間を複数の部分空間として分割したもののうち、少なくとも1つの部分空間に属する前記データの量に関する情報を、該部分空間の表示と関連付けて表示させるための情報を出力する制御部と、
を備えた計測装置。 - 前記取得部により取得された前記データのうち、所定条件に基づいてノイズが混入されていると判断した前記データをノイズとして除去するノイズ除去部を、さらに備え、
前記制御部は、前記ノイズ除去部によりノイズが除去された前記データについて、前記部分空間に属する該データの量に関する情報を、該部分空間の表示と関連付けるための情報を出力する請求項1に記載の計測装置。 - 前記ノイズ除去部は、
前記取得部により取得された前記データのうち、時間的または空間的に近接する2つのデータを選択し、
前記2つのデータの変位ベクトル、および、前記2つのデータのうちいずれか一方のデータの所定の点に対する位置ベクトルを設定し、
前記変位ベクトルと前記位置ベクトルとがなす角度に基づいて、選択した前記2つのデータのうち少なくともいずれか1つをノイズと判定して、該ノイズを除去する請求項2に記載の計測装置。 - 前記ノイズ除去部は、
前記取得部により取得された前記データのうち、時間的または空間的に近接する3つのデータを選択し、
前記3つのデータのうち、任意の2つのデータを2組選択して、各組のデータで定まる2つの変位ベクトルを設定し、
前記2つの変位ベクトルのなす角度に基づいて、選択した前記3つのデータのうち少なくともいずれか1つをノイズと判定して、該ノイズを除去する請求項2に記載の計測装置。 - 前記ノイズ除去部は、
前記取得部により取得された前記データのうち、時間的または空間的に近接する複数のデータを選択し、
前記複数のデータが示す点と、所定の点との距離をそれぞれ算出し、
算出した前記各距離から代表値を導出し、
前記距離と前記代表値との差が所定の閾値を超えた場合に、該距離に対応する前記データをノイズと判定して、該ノイズを除去する請求項2に記載の計測装置。 - 前記座標空間を構築する構築部と、
前記構築部により構築された前記座標空間を、前記複数の部分空間に分割する分割部と、
を、さらに備え、
前記取得部は、計測器から、前記計測対象物の表面形状の座標を示す前記データとしての形状計測データを取得し、
前記取得部により取得された前記形状計測データが、前記複数の部分空間のうちどの部分空間に属するのかを判定する判定部を、さらに備え、
前記制御部は、前記形状計測データで構成される計測物のうち、前記各部分空間に属する部分領域を構成する前記形状計測データの量に関する情報を、表示部に表示させる請求項1〜5のいずれか一項に記載の計測装置。 - 前記制御部は、前記情報を、前記部分領域ごとに視覚的に識別可能となるように前記表示部に表示させる請求項6に記載の計測装置。
- 前記部分領域を構成する前記形状計測データに基づく評価値を、該部分領域を含む前記部分空間ごとに算出する算出部を、さらに備え、
前記制御部は、前記情報を前記表示部に表示させる態様として、前記評価値に基づいて前記計測物の前記各部分領域を前記表示部に表示させる請求項6または7に記載の計測装置。 - 前記算出部は、前記評価値として、前記部分空間に属する前記形状計測データの点数の積算値を算出する請求項8に記載の計測装置。
- 前記算出部は、前記評価値として、所定の基準値に対する、前記部分空間に属する前記形状計測データの点数の積算値の割合を算出する請求項8に記載の計測装置。
- 前記算出部は、前記評価値として、前記部分空間に属する前記形状計測データの密度を算出する請求項8に記載の計測装置。
- 前記制御部は、前記情報を前記表示部に表示させる態様として、前記評価値に対応する前記部分領域を、該評価値に対応した色で着色して前記表示部に表示させる請求項8〜11のいずれか一項に記載の計測装置。
- 前記制御部は、前記情報を前記表示部に表示させる態様として、前記各評価値を示すグラフを前記表示部に表示させる請求項8〜11のいずれか一項に記載の計測装置。
- 前記構築部は、前記座標空間として三次元座標空間を構築し、
前記分割部は、前記三次元座標空間を前記複数の部分空間に分割する請求項6〜13のいずれか一項に記載の計測装置。 - 前記構築部は、
前記取得部により取得された前記形状計測データの分布に基づいて座標軸を抽出し、
抽出した前記座標軸に基づいて前記三次元座標空間を構築する請求項14に記載の計測装置。 - 前記構築部は、三次元座標空間をいずれかの平面に投影した二次元平面を前記座標空間として構築し、
前記分割部は、前記二次元平面を、前記複数の部分空間に分割し、
前記判定部は、前記取得部により取得された前記形状計測データが、前記複数の部分空間のうちどの部分空間に属するのかを判定する請求項6〜13のいずれか一項に記載の計測装置。 - 前記取得部は、人間の頭部を前記計測対象物とした場合、前記計測器から前記頭部における解剖学的基準点の位置を示す前記形状計測データを取得し、
前記構築部は、前記解剖学的基準点の位置を示す前記形状計測データを用いて、前記座標空間を構築する請求項6〜13のいずれか一項に記載の計測装置。 - 前記計測器と、
請求項6〜17のいずれか一項に記載の計測装置と、
を有する計測システム。 - 計測対象物の表面の位置座標を示すデータを取得する取得ステップと、
前記データが、座標空間を複数の部分空間として分割したもののうち、少なくとも1つの部分空間に属する前記データの量に関する情報を、該部分空間の表示と関連付けて表示させるための情報を出力する出力ステップと、
を有する計測方法。 - コンピュータに、
計測対象物の表面の位置座標を示すデータを取得する取得ステップと、
前記データが、座標空間を複数の部分空間として分割したもののうち、少なくとも1つの部分空間に属する前記データの量に関する情報を、該部分空間の表示と関連付けて表示させるための情報を出力する出力ステップと、
を実行させるためのプログラム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US16/286,839 US20190285397A1 (en) | 2018-03-14 | 2019-02-27 | Measuring apparatus, measuring system, measuring method, and recording medium storing program code |
| EP19160498.2A EP3540686A3 (en) | 2018-03-14 | 2019-03-04 | Measuring apparatus, measuring system, measuring method, and carrier means storing program code |
| CN201910175539.3A CN110274560A (zh) | 2018-03-14 | 2019-03-07 | 测量装置、测量系统、测量方法以及记录介质 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018047336 | 2018-03-14 | ||
| JP2018047336 | 2018-03-14 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2019164109A true JP2019164109A (ja) | 2019-09-26 |
Family
ID=68065930
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018092316A Pending JP2019164109A (ja) | 2018-03-14 | 2018-05-11 | 計測装置、計測システム、計測方法およびプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2019164109A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11612345B2 (en) | 2018-03-15 | 2023-03-28 | Ricoh Company, Ltd. | Input device, measurement system, and computer-readable medium |
| US11906294B2 (en) | 2020-07-28 | 2024-02-20 | Ricoh Company, Ltd. | Alignment apparatus, alignment system, alignment method, and recording medium |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04276513A (ja) * | 1991-03-04 | 1992-10-01 | Matsushita Electric Ind Co Ltd | 形状測定処理方法 |
| JPH07134001A (ja) * | 1993-11-11 | 1995-05-23 | Toshimitsu Musha | 磁場による立体形状の計測及び表示装置 |
| JP2011519419A (ja) * | 2008-04-18 | 2011-07-07 | スリーディー スキャナーズ リミテッド | 物体の寸法取得を向上させる方法およびコンピュータプログラム |
| JP2013045141A (ja) * | 2011-08-22 | 2013-03-04 | Dainippon Screen Mfg Co Ltd | 画像処理装置、そのプログラムおよび画像処理方法 |
| JP2014137244A (ja) * | 2013-01-15 | 2014-07-28 | Toshiba Corp | 三次元合成処理システムおよび三次元合成処理方法 |
| US20150173715A1 (en) * | 2013-12-20 | 2015-06-25 | Raghu Raghavan | Apparatus and method for distributed ultrasound diagnostics |
| JP2016186488A (ja) * | 2011-04-13 | 2016-10-27 | 株式会社トプコン | 三次元データ処理装置、三次元データ処理システム、三次元データ処理方法およびプログラム |
-
2018
- 2018-05-11 JP JP2018092316A patent/JP2019164109A/ja active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04276513A (ja) * | 1991-03-04 | 1992-10-01 | Matsushita Electric Ind Co Ltd | 形状測定処理方法 |
| JPH07134001A (ja) * | 1993-11-11 | 1995-05-23 | Toshimitsu Musha | 磁場による立体形状の計測及び表示装置 |
| JP2011519419A (ja) * | 2008-04-18 | 2011-07-07 | スリーディー スキャナーズ リミテッド | 物体の寸法取得を向上させる方法およびコンピュータプログラム |
| JP2016186488A (ja) * | 2011-04-13 | 2016-10-27 | 株式会社トプコン | 三次元データ処理装置、三次元データ処理システム、三次元データ処理方法およびプログラム |
| JP2013045141A (ja) * | 2011-08-22 | 2013-03-04 | Dainippon Screen Mfg Co Ltd | 画像処理装置、そのプログラムおよび画像処理方法 |
| JP2014137244A (ja) * | 2013-01-15 | 2014-07-28 | Toshiba Corp | 三次元合成処理システムおよび三次元合成処理方法 |
| US20150173715A1 (en) * | 2013-12-20 | 2015-06-25 | Raghu Raghavan | Apparatus and method for distributed ultrasound diagnostics |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11612345B2 (en) | 2018-03-15 | 2023-03-28 | Ricoh Company, Ltd. | Input device, measurement system, and computer-readable medium |
| US11906294B2 (en) | 2020-07-28 | 2024-02-20 | Ricoh Company, Ltd. | Alignment apparatus, alignment system, alignment method, and recording medium |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10643347B2 (en) | Device for measuring position and orientation of imaging apparatus and method therefor | |
| JP6363863B2 (ja) | 情報処理装置および情報処理方法 | |
| EP2866201B1 (en) | Information processing apparatus and method for controlling the same | |
| JP2022522279A (ja) | 優先点を識別して保持する点群の併合方法 | |
| US8929628B2 (en) | Measuring device and measuring method | |
| JP2011179910A (ja) | 位置姿勢計測装置、位置姿勢計測方法、およびプログラム | |
| JP2012021958A (ja) | 位置姿勢計測装置、その計測処理方法及びプログラム | |
| US11490062B2 (en) | Information processing apparatus, information processing method, and storage medium | |
| US10929963B2 (en) | OCT image processing | |
| US20120328211A1 (en) | System and method for splicing images of workpiece | |
| JP6966997B2 (ja) | 対象上または対象の近くの特徴を測定するための方法および機器 | |
| JP6723798B2 (ja) | 情報処理装置、方法、プログラム | |
| JP6895382B2 (ja) | 観視対象の3次元形状を描画する画像と同時に観視対象の2次元画像を表示するための方法および機器 | |
| US20230267593A1 (en) | Workpiece measurement method, workpiece measurement system, and program | |
| US11232568B2 (en) | Three-dimensional image display method, three-dimensional image display device, and recording medium | |
| US20190066363A1 (en) | Image processing apparatus and image processing method | |
| US11100699B2 (en) | Measurement method, measurement device, and recording medium | |
| JP2019164109A (ja) | 計測装置、計測システム、計測方法およびプログラム | |
| US8447082B2 (en) | Medical image displaying apparatus, medical image displaying method, and medical image displaying program | |
| US20190285397A1 (en) | Measuring apparatus, measuring system, measuring method, and recording medium storing program code | |
| JP2015050482A (ja) | 画像処理装置、立体画像表示装置、画像処理方法およびプログラム | |
| CN111742352A (zh) | 3d对象建模方法以及相关设备和计算机程序产品 | |
| US11055865B2 (en) | Image acquisition device and method of operating image acquisition device | |
| US20220357157A1 (en) | Image-processing method, image-processing device, and recording medium | |
| JP6867766B2 (ja) | 情報処理装置およびその制御方法、プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210208 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220126 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20220204 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220208 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220407 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20220823 |