JP2019146365A - Piezoelectric actuator, piezoelectric drive device, robot, electronic component transfer device, printer, and projector - Google Patents
Piezoelectric actuator, piezoelectric drive device, robot, electronic component transfer device, printer, and projector Download PDFInfo
- Publication number
- JP2019146365A JP2019146365A JP2018028549A JP2018028549A JP2019146365A JP 2019146365 A JP2019146365 A JP 2019146365A JP 2018028549 A JP2018028549 A JP 2018028549A JP 2018028549 A JP2018028549 A JP 2018028549A JP 2019146365 A JP2019146365 A JP 2019146365A
- Authority
- JP
- Japan
- Prior art keywords
- piezoelectric
- electrode
- piezoelectric actuator
- diaphragm
- actuator according
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images














Abstract
Description
本発明は、圧電アクチュエーター、圧電駆動装置、ロボット、電子部品搬送装置、プリンターおよびプロジェクターに関するものである。 The present invention relates to a piezoelectric actuator, a piezoelectric drive device, a robot, an electronic component transport device, a printer, and a projector.
従来から、圧電素子を備える超音波モーター(圧電アクチュエーター)が知られている(例えば、特許文献1参照)。特許文献1に記載の超音波モーターは、圧電振動素子で構成された楕円運動をする振動子と、振動子の先端部分に接着されている摩擦接触子と、を備えている。そして、特許文献1に記載の超音波モーターでは、摩擦接触子に用いられるピン形部材として、円柱形または角柱形の部材を用いることが開示されている。
Conventionally, an ultrasonic motor (piezoelectric actuator) including a piezoelectric element is known (see, for example, Patent Document 1). The ultrasonic motor described in
しかしながら、特許文献1に記載の超音波モーターでは、ピン形部材と、ピン形部材が当接することによって駆動される被駆動部材と、の接触面の面積が比較的大きい。このため、摩擦接触子の拘束力が大きくなり、駆動に要する最低電圧が高くなるという課題がある。
However, in the ultrasonic motor described in
本発明は、上述の課題を解決するためになされたものであり、以下の適用例として実現することが可能である。 The present invention has been made to solve the above-described problems, and can be realized as the following application examples.
本適用例の圧電アクチュエーターは、振動板と、
前記振動板に積層され、圧電体と、前記圧電体の一方の面上に配置され駆動信号が入力される第1電極と、前記圧電体の他方の面上に配置され基準電位に接続される第2電極と、を備える圧電素子と、
前記圧電素子に配置され、被駆動部材に当接する当接面を含む先端チップと、
を有し、
前記第1電極に直交する第1平面で前記当接面を切断したときの第1断面形状が、曲率を有していることを特徴とする。
The piezoelectric actuator of this application example includes a diaphragm,
Laminated on the diaphragm, the piezoelectric body, a first electrode disposed on one surface of the piezoelectric body and receiving a drive signal, and disposed on the other surface of the piezoelectric body and connected to a reference potential A piezoelectric element comprising: a second electrode;
A tip having a contact surface disposed on the piezoelectric element and contacting the driven member;
Have
The first cross-sectional shape when the contact surface is cut along a first plane orthogonal to the first electrode has a curvature.
以下、本発明の圧電アクチュエーター、圧電駆動装置、ロボット、電子部品搬送装置、プリンターおよびプロジェクターを添付図面に示す好適な実施形態に基づいて詳細に説明する。 Hereinafter, a piezoelectric actuator, a piezoelectric drive device, a robot, an electronic component transport device, a printer, and a projector of the present invention will be described in detail based on preferred embodiments shown in the accompanying drawings.
1.圧電駆動装置および圧電アクチュエーター
図1は、本発明の実施形態に係る圧電駆動装置(圧電モーター)の概略構成を示す平面図である。図2は、図1に示す圧電駆動装置の動作を説明するための図である。図3は、図1に示す圧電アクチュエーターが備える振動部、支持部および接続部の斜視図である。図4は、図1中のA−A線断面図である。図5は、図1に示す圧電アクチュエーターが備える圧電素子の平面図(第1振動板側から見た図)である。
1. Piezoelectric Drive Device and Piezoelectric Actuator FIG. 1 is a plan view showing a schematic configuration of a piezoelectric drive device (piezoelectric motor) according to an embodiment of the present invention. FIG. 2 is a diagram for explaining the operation of the piezoelectric driving device shown in FIG. FIG. 3 is a perspective view of a vibration section, a support section, and a connection section included in the piezoelectric actuator shown in FIG. 4 is a cross-sectional view taken along line AA in FIG. FIG. 5 is a plan view of the piezoelectric element included in the piezoelectric actuator shown in FIG. 1 (viewed from the first diaphragm side).
図1に示す圧電駆動装置100は、逆圧電効果を利用して回転力を出力する圧電モーターである。この圧電駆動装置100は回動軸Oまわりに回動可能な被駆動部材(従動部)であるローター110と、ローター110の外周面111に当接する圧電アクチュエーター1と、を有する。この圧電駆動装置100では、圧電アクチュエーター1がその駆動力をローター110に伝達することで、ローター110が回動軸Oまわりに回動(回転)する。
A
なお、圧電アクチュエーター1の配置は、圧電アクチュエーター1から被駆動部材へ所望の駆動力を伝達することができれば、図示の位置に限定されず、例えば、ローター110の板面(底面)に圧電アクチュエーター1を当接させてもよい。また、圧電駆動装置100は、1つの被駆動部材に対して複数の圧電アクチュエーター1を当接させる構成であってもよい。また、圧電駆動装置100は、図示のような被駆動部材を回転運動させる構成に限定されず、例えば、被駆動部材を直線運動させる構成であってもよい。
The arrangement of the
圧電アクチュエーター1は、図1に示すように、長手形状をなす振動部11と、支持部12と、これらを接続している1対の接続部13と、振動部11の長手方向での一端部(先端部)から突出している伝達部14(先端チップ)と、を有する。また、振動部11は、圧電素子4を有する。
As shown in FIG. 1, the
圧電素子4は、駆動用の圧電素子4a、4b、4c、4d、4eと、検出用の圧電素子4fと、を有する。図2に示すように、駆動用の圧電素子4a、4b、4c、4d、4eは、伝達部14の先端を楕円運動させるように逆圧電効果により伸縮する。これにより、伝達部14は、外周面111にその周方向での一方向への駆動力を与えて、ローター110を回動軸Oまわりに回動させる。このとき、振動部11の振動は、圧電素子4a、4b、4c、4dの伸縮によるS字状(または逆S字状)の屈曲振動(横振動)と、圧電素子4eの伸縮による縦振動とを複合した振動である。また、検出用の圧電素子4fは、振動部11の振動に伴って、圧電効果により、振動部11の駆動状態(振動状態)に応じた信号(電荷)を出力する。ここで、振動部11は、横振動(屈曲振動)の節PSa、PSbおよび縦振動と横振動との共通の節PScを有する。
The
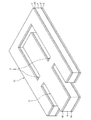
このような圧電アクチュエーター1は、図3に示すような積層構造を有して構成されている。すなわち、図3に示すように、振動部11、支持部12および接続部13は、第1振動板2と、第2振動板3と、これらの間に配置されている圧電素子4および中間部材5と、を有する。そして、第1振動板2は、接着剤61を介して圧電素子4および中間部材5に接合されている。同様に、第2振動板3は、接着剤62を介して圧電素子4および中間部材5に接合されている。以下、圧電アクチュエーター1の各部を順次説明する。
Such a
(第1、第2振動板)
第1振動板2および第2振動板3は、それぞれ、前述した振動部11、支持部12および接続部13に対応した平面視形状をなしている。そして、第1振動板2および第2振動板3は、圧電素子4を挟んでいる部分を有し、当該部分および圧電素子4を含む積層体が振動部11を構成している。また、第1振動板2および第2振動板3は、中間部材5を挟んでいる部分を有し、当該部分および中間部材5を含む積層体が支持部12を構成している。なお、接続部13には、圧電素子4および中間部材5がいずれも配置されておらず、第1振動板2と第2振動板3との間には、接続部13の長さと、圧電素子4または中間部材5の厚さと、に応じた隙間が形成されている。
(First and second diaphragm)
The
このような第1振動板2および第2振動板3としては、それぞれ、特に限定されないが、例えば、シリコン基板、シリコンカーバイト基板等の半導体基板を用いることができる。第1振動板2または第2振動板3として半導体基板(特にシリコン基板)を用いることで、第1振動板2または第2振動板3をシリコンウエハープロセス(MEMSプロセス)により生産性よく高精度に製造することができる。
The
第1振動板2の圧電素子4側(図4中上側)の面には、絶縁層24が設けられている。これにより、第1振動板2を介した配線層7の短絡を低減することができる。同様に、第2振動板3の圧電素子4側(図4中下側)の面には、絶縁層34が設けられている。これにより、第2振動板3を介した配線層8の短絡を低減することができる。絶縁層24、34は、それぞれ、例えば、第1振動板2および第2振動板3にそれぞれシリコン基板を用いた場合、シリコン基板の表面を熱酸化することにより形成されたシリコン酸化膜である。なお、絶縁層24、34は、それぞれ、熱酸化によるシリコン酸化膜に限定されず、例えば、TEOS(テトラエトキシシラン)を用いたCVD法等で形成したシリコン酸化膜であってもよい。また、絶縁層24、34は、それぞれ、絶縁性を有していればシリコン酸化膜に限定されず、例えば、シリコン窒化膜等の無機膜、エポキシ系樹脂、ウレタン系樹脂、ユリア系樹脂、メラミン系樹脂、フェノール系樹脂、エステル系樹脂、アクリル系樹脂等の各種樹脂材料で構成された有機膜であってもよい。さらに、絶縁層24、34は、それぞれ、異なる材料で構成された複数の層の積層膜であってもよい。
An insulating
第1振動板2の絶縁層24上には、配線層7が配置されている。配線層7は、振動部11に配置されている複数の第1電極71(配線電極)と、複数の第1電極71から接続部13を経由して支持部12にわたって配置されている複数の第1配線72と、を有する(図4参照)。これらは、例えば、公知の成膜工程により一括して形成される。
A
複数の第1電極71は、前述した圧電素子4a、4b、4c、4d、4e、4fに対応して設けられ、対応する圧電素子4a、4b、4c、4d、4e、4f(より具体的には後述の第1電極42a、42b、42c、42d、42eまたは第3電極44)に電気的に接続されている。複数の第1配線72は、複数の第1電極71に対応して設けられ、それぞれ対応する第1電極71から支持部12の端部まで引き回されている。また、各第1配線72の端部には、中間部材5上の配線53を介して、図示しない基板に電気的に接続される端子91が接続されている(図4参照)。なお、各第1配線72の端部に端子91を直接設けてもよい。
The plurality of
一方、第2振動板3の絶縁層34上には、配線層8が配置されている。配線層8は、図4に示すように、振動部11に配置されている第2電極81と、第2電極81から接続部13を経由して支持部12にわたって配置されている第2配線82と、を有する。これらは、例えば、公知の成膜工程により一括して形成される。
On the other hand, the
第2電極81は、前述した圧電素子4(より具体的には後述の第2電極43)に電気的に接続されている。第2配線82は、支持部12の端部まで引き回されている。また、第2配線82の端部には、図示しない基板に電気的に接続される端子92が設けられている(図4参照)。
The
配線53、配線層7、8および端子92、91の構成材料としては、それぞれ、特に限定されず、例えば、アルミニウム(Al)、ニッケル(Ni)、金(Au)、白金(Pt)、銅(Cu)、チタン(Ti)、タングステン(W)等の金属材料が挙げられる。また、端子91、92は、公知の成膜法を用いて形成することができる。
The constituent materials of the
以上のような第1振動板2および第2振動板3は、接着剤61、62により、圧電素子4および中間部材5に接合されている。ここで、接着剤61は、配線層7と圧電素子4との電気的接続を許容するように、第1振動板2と圧電素子4とを接合している。また、接着剤62は、配線層8と圧電素子4との電気的接続を許容するように、第2振動板3と圧電素子4とを接合している。接着剤61、62としては、それぞれ、特に限定されないが、例えば、エポキシ系、アクリル系、シリコン系等の各種接着剤、異方導電性接着剤等を用いることができる。
The
(圧電素子)
圧電素子4は、図5に示すように、板状の圧電体41と、圧電体41の一方(第1振動板2側)の面上に配置されている第1電極42(駆動用電極)および第3電極44(検出用電極)と、圧電体41の他方(第2振動板3側)の面上に配置されている第2電極43(グランド電極)と、を有する。
(Piezoelectric element)
As shown in FIG. 5, the
圧電体41は、平面視で長方形をなしている。この圧電体41の構成材料としては、例えば、チタン酸ジルコン酸鉛(PZT)、チタン酸バリウム、チタン酸鉛、ニオブ酸カリウム、ニオブ酸リチウム、タンタル酸リチウム、タングステン酸ナトリウム、酸化亜鉛、チタン酸バリウムストロンチウム(BST)、タンタル酸ストロンチウムビスマス(SBT)、メタニオブ酸鉛、スカンジウムニオブ酸鉛等の圧電セラミックスが挙げられる。なお、圧電体41の構成材料としては、上述した圧電セラミックスの他にも、ポリフッ化ビニリデン、水晶等を用いてもよい。
The
また、圧電体41は、例えば、バルク材料から形成してもよいし、ゾル−ゲル法やスパッタリング法を用いて形成してもよいが、バルク材料から形成することが好ましい。これにより、圧電体41の厚さを厚くし、圧電素子4の変位量を大きくすることができる。そのため、圧電アクチュエーター1の電流効率をさらに向上させることができる。
The
第1電極42(駆動用電極)は、圧電素子4a、4b、4c、4d、4eごとに個別に設けられた個別電極である複数(5つ)の第1電極42a、42b、42c、42d、42eで構成されている。第1電極42a、42b、42c、42d、42eには、それぞれ、駆動信号(駆動電圧)が入力される。また、第3電極44(検出用電極)は、圧電素子4fに設けられた個別電極であり、圧電素子4の駆動状態に応じた検出信号を出力する。一方、第2電極43(グランド電極)は、第1電極42a、42b、42c、42d、42eおよび第3電極44に対して個別に対向するように設けられた電極であり、基準電位(例えばグランド電位)に電気的に接続される。
The first electrode 42 (drive electrode) is a plurality of (five)
すなわち、圧電素子4aは、圧電体41、第1電極42aおよび第2電極43を含んで構成されている。同様に、圧電素子4b、4c、4d、4eは、圧電体41、第1電極42b、42c、42d、42eおよび第2電極43を含んで構成されている。圧電素子4fは、圧電体41、第3電極44および第2電極43を含んで構成されている。このように、圧電素子4は、6つの圧電素子4a、4b、4c、4d、4e、4fを有している。
That is, the
ここで、駆動用電極である第1電極42a、42b、42c、42d、42eのうち、第1電極42a、42b、42c、42dは、駆動信号の入力により圧電体41を屈曲振動(前述した横振動)させる電界を第2電極43との間に発生させる屈曲用電極である。これに対し、第1電極42eは、駆動信号の入力により圧電体41を屈曲させずに伸縮振動(前述した縦振動)させる電界を第2電極43との間に発生させる縦振動用電極である。
Here, among the
本実施形態では、第1電極42eは、圧電体41の幅方向の中央部に圧電体41の長手方向に沿って配置されている。第1電極42a、42bは、第1電極42eに対して圧電体41の幅方向の一方側に圧電体41の長手方向に沿って配置されている。第1電極42c、42dは、第1電極42eに対して圧電体41の幅方向の他方側に圧電体41の長手方向に沿って配置されている。第3電極44は、第1電極42eに対して伝達部14とは反対側に配置されている。
In the present embodiment, the
なお、圧電体41は、圧電素子4a、4b、4c、4d、4e、4fに共通して一体的に構成されているが、圧電素子4a、4b、4c、4d、4e、4fごとに個別に分割して設けられていてもよい。
The
第1電極42、第2電極43および第3電極44の構成材料としては、それぞれ、特に限定されないが、例えば、アルミニウム(Al)、ニッケル(Ni)、金(Au)、白金(Pt)、イリジウム(Ir)、銅(Cu)、チタン(Ti)、タングステン(W)等の金属材料が挙げられる。
The constituent materials of the
(中間部材)
中間部材5は、前述した支持部12において、第1振動板2と第2振動板3との間に設けられ、平面視で、支持部12と実質的に同じ形状および大きさを有している。この中間部材5は、支持部12を補強するとともに、支持部12における第1振動板2と第2振動板3との間の距離を振動部11における第1振動板2と第2振動板3との間の距離と等しくするように規制する機能を有する。
(Intermediate member)
The intermediate member 5 is provided between the
図4に示すように、中間部材5は、本体51と、本体51上に設けられている絶縁層52と、を有する。このような中間部材5は、例えば、本体51がシリコンで構成され、絶縁層52がシリコン酸化膜で構成されている。なお、中間部材5の構成材料としては、これに限定されず、例えば、ジルコニア、アルミナ、チタニア等の各種セラミックス、各種樹脂材料等を用いてもよい。
As shown in FIG. 4, the intermediate member 5 includes a
(伝達部)
伝達部14(先端チップ)は、例えば、セラミックス等の耐摩耗性に優れた材料で構成され、振動部11に対して接着剤等により接合されている。すなわち、伝達部14は、圧電素子4、第1振動板2および第2振動板3に接合するように配置され、ローター110(被駆動部材)に当接する当接面を含む。
(Transmission part)
The transmission portion 14 (tip tip) is made of a material having excellent wear resistance such as ceramics, and is bonded to the
図6は、図1に示す伝達部近傍を拡大して示す斜視図である。また、図7は、図6に示す伝達部を取り出して示す斜視図である。また、図8は、伝達部がローター(被駆動部材)に当接する当接面を、図7に示す第1平面F1で切断したときの第1断面形状を示す図である。 FIG. 6 is an enlarged perspective view showing the vicinity of the transmission section shown in FIG. FIG. 7 is a perspective view showing the transmission unit shown in FIG. FIG. 8 is a diagram showing a first cross-sectional shape when the contact surface where the transmission unit contacts the rotor (driven member) is cut along the first plane F1 shown in FIG.
伝達部14は、図7に示すように、直方体形状をなす基部141と、基部141の一面141aから突出する突出部142と、を備えている。そして、突出部142の表面のうち、ローター110に臨む面が当接面143である。
As shown in FIG. 7, the
一面141aは、圧電体41の厚さ方向に長軸を持つ長方形をなしている。この長軸の長さは、振動部11の厚さと同じになっている。そして、一面141aを平面視したとき、突出部142の幅は、一面141aの短辺よりも狭くなっており、かつ、突出部142の長さは、一面141aの長辺と同じ長さになっている。
The one
なお、本願明細書では、圧電体41の厚さ方向(図7の上下方向)を「垂直方向D1」ともいう。
In the present specification, the thickness direction (vertical direction in FIG. 7) of the
ここで、図7に示す仮想的な第1平面F1について説明する。この第1平面F1は、第1電極42(図5参照)に直交するとともに、当接面143を通過する平面である。すなわち、第1平面F1は、前述した垂直方向D1に平行であり、かつ、突出部142の幅を二分するように通過する。このような第1平面F1で切断されたとき、当接面143の断面形状(第1断面形状)は、図8に示すように曲率を有している。
Here, the virtual first plane F1 shown in FIG. 7 will be described. The first plane F1 is a plane that is orthogonal to the first electrode 42 (see FIG. 5) and passes through the
このような形状を有する伝達部14によれば、当接面143のうち、突出部142とローター110との接触面積を小さくすることができる。これにより、伝達部14が楕円運動するように振動部11を駆動するときの拘束力(運動抵抗)を小さくすることができる。その結果、振動部11を駆動するための最低電圧を低くすることができ、圧電アクチュエーター1の高性能化を図ることができる。
According to the
なお、「曲率を有している」とは、当接面143の断面形状が曲線になっている状態をいう。この曲線は、いかなる線形であってもよいが、好ましくは円弧またはそれに準じた形状とされる。これにより、当接面143とローター110とが接触したとき、当接面143の摩耗による形状変化、および、それに伴う当接面143とローター110との接触状態が安定しやすくなる。また、当接面143の設計も比較的容易になる。
“Having curvature” means a state in which the cross-sectional shape of the
なお、本願明細書では、前述した圧電体41の横振動の方向をローター110の「送り方向D2」ともいい、圧電体41の縦運動の方向をローター110に対する「押圧方向D3」ともいう。そして、送り方向D2と押圧方向D3とを含む平面を「振動面F2」という。垂直方向D1は、振動面F2に直交する。
In the present specification, the direction of transverse vibration of the
以上のように、圧電アクチュエーター1は、第1振動板2および第2振動板3と、第1振動板2と第2振動板3との間に積層され圧電体41とその一方の面上に配置され駆動信号が入力される第1電極42と圧電体41の他方の面上に配置され基準電位に接続される第2電極43とを備える圧電素子4と、圧電素子4に配置されローター110(被駆動部材)に当接する当接面143を含む伝達部14(先端チップ)と、を有し、第1電極42に直交する第1平面F1で当接面143を切断したときの断面形状(第1断面形状)が、曲率を有している。
As described above, the
このような圧電アクチュエーター1によれば、当接面143とローター110との接触面積を小さくすることができ、振動部11を駆動するための最低電圧を低くすることができる。その結果、圧電アクチュエーター1の高性能化を図ることができる。
According to such a
より具体的に説明すると、第1平面F1による当接面143の第1断面形状(図8参照)は、その全長の中間付近の突出高さが最も高く、中間から離れるにつれて突出高さが徐々に低くなっている。そして、全体としては円弧状になっている。このため、当接面143のうちローター110と接触し得る部分は、図7に破線で示すように、当接面143の第1断面形状の中間付近に限られることとなり、接触面積を小さくすることができる。その結果、振動部11を駆動するための最低電圧を低くすることができる。
More specifically, the first cross-sectional shape (see FIG. 8) of the
また、当接面143の第1断面形状が曲率を有することにより、例えば振動部11が垂直方向D1に振動したとしても、その振動に伴う当接面143の摩耗を最小限に留めることができる。すなわち、当接面143の第1断面形状が曲率を有することにより、振動部11が垂直方向D1に振動したとしても、突出部142とローター110との接触面積が時間経過ととともに大きく拡大するといった顕著な変化が抑えられる。
Further, since the first cross-sectional shape of the
なお、仮に、伝達部14とローター110との接触面積が経時的に変化してしまうと、圧電アクチュエーター1の特性も経時的に変化してしまい、信頼性の低下を招くおそれがある。
If the contact area between the
これに対し、本実施形態に係る当接面143は、振動部11が垂直方向に振動した場合に生じる摩耗に伴う形状変化をあらかじめ見越した形状ともいえるため、そのような伝達部14を備える圧電アクチュエーター1では、その駆動に際して発生する当接面143の摩耗が当初から少なく抑えられる。その結果、伝達部14とローター110との接触状態が当初から安定することとなり、当初から設計通りの特性を安定的に発揮し得る、信頼性の高い圧電アクチュエーター1を実現することができる。
On the other hand, the
当接面143の第1断面形状は、圧電アクチュエーター1やローター110の大きさに応じて適宜設定されるが、例えば曲率半径が1mm以上2000mm以下の曲率を有する形状であるのが好ましく、3mm以上1000mm以下の曲率を有する形状であるのがより好ましい。これにより、摩耗による接触状態の変化が少なく、かつ、十分な大きさの駆動力を発生させ得る当接面143を実現することができる。
The first cross-sectional shape of the
一方、当接面143は、振動面F2で切断されたときの断面形状(第2断面形状)も曲率を有していることが好ましい。
On the other hand, it is preferable that the
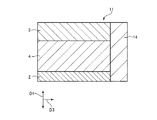
図9は、伝達部がローター(被駆動部材)に当接する当接面を、図7に示す振動面F2で切断したときの第2断面形状を示す図である。 FIG. 9 is a diagram illustrating a second cross-sectional shape when the contact surface with which the transmission unit contacts the rotor (driven member) is cut along the vibration surface F2 illustrated in FIG.
振動面F2は、第1平面F1に直交し、第1電極42(図5参照)に平行な平面(第2平面)である。このような振動面F2による当接面143の第2断面形状が曲率を有していることにより、当接面143とローター110との接触面積をより小さくすることができる。その結果、振動部11を駆動するための最低電圧をさらに低くすることができる。
The vibration surface F2 is a plane (second plane) orthogonal to the first plane F1 and parallel to the first electrode 42 (see FIG. 5). Since the second cross-sectional shape of the
当接面143の第2断面形状は、圧電アクチュエーター1やローター110の大きさに応じて適宜設定されるが、第2断面形状の曲率半径は、第1断面形状の曲率半径より小さいことが好ましく、第1断面形状の曲率半径の50%以下であるのがより好ましい。これにより、摩耗がより少なく、かつ、十分な大きさの駆動力を発生させ得る当接面143を実現することができる。
The second cross-sectional shape of the
なお、以上のような当接面143の形状、すなわち第1断面形状および第2断面形状は、伝達部14を製造する際にあらかじめ形作られたものであってもよいし、ローター110との接触による摩耗を利用して形作られたものであってもよい。前者は、機械的加工またはその他の加工方法によって目的の形状を得ることができ、後者は、整形前の母材に摩耗を生じさせることによって目的の形状を得ることができる。
In addition, the shape of the
このうち、後者の方法によれば、形作られた当接面143の形状が、ローター110との接触による摩耗を少なく抑え得る形状となる。すなわち、後者の方法では、当接面143の形状変化の原因であるローター110との接触を利用して当接面143の形状を整形しているため、整形後に同様の摩耗が生じたとしても、その摩耗量は非常に少ないものとなり、著しい形状変化を抑制することができる。このため、伝達部14とローター110との接触状態が経時的に変化しにくくなり、特性の経時的変化が特に抑えられた圧電アクチュエーター1が得られる。すなわち、使用開始直後から安定した特性を示す圧電アクチュエーター1が得られる。
Among these, according to the latter method, the shape of the formed
したがって、圧電アクチュエーター1の製造にあたっては、当接面143をローター110に当接させ、形状変化が収束するまで圧電アクチュエーター1を駆動するプロセス(エージング)を経るようにしてもよい。このようなプロセスを経ることによって、当接面143とローター110との接触状態に個体差があったとしても、その個体差を踏まえた形状に当接面143を整形することができる。これにより、特性の経時的変化が特に抑えられた圧電アクチュエーター1が得られる。
Therefore, in manufacturing the
また、圧電素子4は、圧電体41の一方(第1電極42と同じ側)の面上に、第1電極42に対して伝達部14とは反対側に配置され、圧電体41の振動に伴って電荷を出力する検出用電極である第3電極44を有する。これにより、圧電体41上の領域を有効利用して、検出用電極である第3電極44を配置することができる。また、当該領域に第3電極44を配置することで、第3電極44が伝達部14とローター110との接触・離間による衝撃波の影響を受け難くなるため、ノイズの少ない検出信号が得られるという効果もある。なお、第3電極44は、必要に応じて設ければよく、省略してもよい。省略した場合、第1電極42a、42b、42c、42d、42eのいずれかを検出用電極との兼用にすればよい。
The
なお、本実施形態に係る複数(6つ)の第2電極43は、圧電体41を介し、第1電極42および第3電極44に対向して設けられている。これらの複数の第2電極43は、例えば互いに等電位に設定されることから、第1電極42や第3電極44と対向していれば第2電極43の形状は特に限定されない。
Note that a plurality (six) of the
本実施形態では、各第2電極43が、複数の第1電極42および第3電極44のそれぞれと対向するように配置されているとともに、その面積は、対応する第1電極42または第3電極44の面積よりもそれぞれ大きくなるように設定されている。このように、第1電極42と第2電極43とで面積差を設定する(形状を異ならせる)ことにより、振動部11を送り方向D2や押圧方向D3のみでなく、垂直方向D1にも振動させることができる。このため、前述した第1断面形状および第2断面形状を整形するプロセスを効率よく行うことができる。
In the present embodiment, each
つまり、本実施形態に係る圧電アクチュエーター1は、第1電極42に駆動信号が入力され、第2電極43が基準電位に接続されたとき、第1電極42と第2電極43とを結ぶ方向(垂直方向D1)に振動するように構成されている。これにより、振動部11を垂直方向D1に振動させることができ、前述した第1断面形状および第2断面形状を整形するプロセスを効率よく行うことができる。
That is, in the
また、振動部11の中心CPは、圧電体41を屈曲させずに伸縮振動させたときの振動の節の位置に配置されていることが好ましい。これにより、圧電アクチュエーター1の起動時および定常振動時の双方における駆動電圧を効果的に低減することができる。
The center CP of the
また、支持部12は、1対の接続部13を介して振動部11を支持しており、振動部11の中心CPは、1対の接続部13間に配置されていることが好ましい。これにより、圧電アクチュエーター1の起動時および定常振動時の双方における駆動電圧を効果的に低減することができる。
Further, the
また、圧電駆動装置100は、圧電アクチュエーター1と、圧電アクチュエーター1により駆動される被駆動部材であるローター110と、を備える。このような圧電駆動装置100によれば、圧電アクチュエーター1の優れた特性を利用して、圧電駆動装置100の特性を高めることができる。
The
(第1変形例)
また、振動部11を垂直方向D1にも振動させる手段は、上記のものに限定されない。
(First modification)
Further, the means for vibrating the vibrating
図10は、図1に示す圧電アクチュエーター1に含まれる振動部11の第1変形例を示す断面図である。
FIG. 10 is a cross-sectional view illustrating a first modification of the
図10に示す振動部11は、第1振動板2と第2振動板3とで厚さが異なる以外、図5に示す振動部11と同様である。
The vibrating
すなわち、図10に示す振動部11では、第2振動板3の厚さが第1振動板2の厚さより厚くなっている。
That is, in the
このようにして第1振動板2と第2振動板3とで厚さを異ならせることにより、例えば圧電素子4が第1振動板2側に屈曲しようとするときの曲げ剛性と第2振動板3側に屈曲しようとするときの曲げ剛性とが異なる。このように曲げ剛性を非対称にすることで、振動部11を垂直方向D1にも振動させることができる。
Thus, by making the
第1振動板2および第2振動板3は、構成材料が互いに同じ場合、例えば、一方の厚さを他方の厚さの1.01倍以上3倍以下程度に異ならせるのが好ましい。
When the constituent materials of the
なお、第1変形例は上記のものに限定されず、例えば第1振動板2および第2振動板3の間で厚さが同じである一方、材質が異なっていてもよい。すなわち、第1振動板2と第2振動板3との間で構成材料を異ならせることにより、厚さが同じであっても曲げ剛性が異なるように設定してもよい。
以上のような第1変形例によっても、図5に示す振動部11と同様の効果が得られる。
Note that the first modification is not limited to the above, and for example, the
Also by the first modified example as described above, the same effect as that of the vibrating
なお、図10では、第1振動板2、第2振動板3、圧電素子4および伝達部14以外の部位の図示を省略している。
In FIG. 10, illustration of parts other than the
(第2変形例)
図11は、図1に示す圧電アクチュエーター1に含まれる振動部11の第2変形例を示す断面図である。なお、図11では、接着剤や電極等の一部の図示を省略している。
(Second modification)
FIG. 11 is a cross-sectional view illustrating a second modification of the
図11に示す振動部11は、第1振動板2および第2振動板3と圧電素子4とを含む単位構造6が複数積層されてなる以外、図5に示す振動部11と同様である。
The vibrating
すなわち、図11に示す振動部11は、複数の単位構造6を積層してなるものである(スタック構造)。このような振動部11によれば、単位構造6による変位量が積層数の分だけ累積するため、ローター110の一か所に対してより大きな駆動力を伝達することができる。
That is, the
単位構造6の積層数は、特に限定されないが、2以上20以下であるのが好ましく、3以上15以下であるのがより好ましい。これにより、圧電アクチュエーター1の大型化を抑制しつつ、十分な駆動量を確保することができる。
以上のような第2変形例によっても、図5に示す振動部11と同様の効果が得られる。
The number of
Also by the second modified example as described above, the same effect as that of the vibrating
なお、図11では、第1振動板2、第2振動板3、圧電素子4および伝達部14以外の部位の図示を省略している。
In addition, in FIG. 11, illustration of parts other than the
2.ロボット
次に、本発明のロボットの実施形態について説明する。
2. Next, an embodiment of the robot of the present invention will be described.
図12は、本発明のロボットの実施形態を示す斜視図である。
図12に示すロボット1000は、精密機器やこれを構成する部品(対象物)の給材、除材、搬送および組立等の作業を行うことができる。ロボット1000は、6軸ロボットであり、床や天井に固定されるベース1010と、ベース1010に回動自在に連結されたアーム1020と、アーム1020に回動自在に連結されたアーム1030と、アーム1030に回動自在に連結されたアーム1040と、アーム1040に回動自在に連結されたアーム1050と、アーム1050に回動自在に連結されたアーム1060と、アーム1060に回動自在に連結されたアーム1070と、これらアーム1020、1030、1040、1050、1060、1070の駆動を制御する制御部1080と、を有している。また、アーム1070にはハンド接続部が設けられており、ハンド接続部にはロボット1000に実行させる作業に応じたエンドエフェクター1090が装着される。また、各関節部のうちの全部または一部には、圧電アクチュエーター1を備える圧電駆動装置100が搭載されており、この圧電駆動装置100の駆動によって各アーム1020、1030、1040、1050、1060、1070が回動する。なお、各圧電駆動装置100の駆動は、制御部1080によって制御される。
FIG. 12 is a perspective view showing an embodiment of the robot of the present invention.
The
以上のようなロボット1000は、圧電アクチュエーター1を備える。このようなロボット1000によれば、圧電アクチュエーター1の優れた特性を利用して、ロボット1000の特性を高めることができる。
The
3.電子部品搬送装置
次に、本発明の電子部品搬送装置の実施形態について説明する。
3. Next, an embodiment of the electronic component conveying device of the present invention will be described.
図13は、本発明の電子部品搬送装置の実施形態を示す斜視図である。図14は、図13に示す電子部品搬送装置が備える電子部品保持部の斜視図である。なお、以下では、説明の便宜上、互いに直交する3軸をX軸、Y軸およびZ軸とする。 FIG. 13 is a perspective view showing an embodiment of the electronic component carrying apparatus of the present invention. FIG. 14 is a perspective view of an electronic component holding unit provided in the electronic component transport apparatus shown in FIG. In the following, for convenience of explanation, the three axes orthogonal to each other are referred to as an X axis, a Y axis, and a Z axis.
図13に示す電子部品搬送装置2000は、電子部品検査装置に適用されており、基台2100と、基台2100の側方に配置された支持台2200と、を有している。また、基台2100には、検査対象の電子部品Qが載置されてY軸方向に搬送される上流側ステージ2110と、検査済みの電子部品Qが載置されてY軸方向に搬送される下流側ステージ2120と、上流側ステージ2110と下流側ステージ2120との間に位置し、電子部品Qの電気的特性を検査する検査台2130と、が設けられている。なお、電子部品Qの例として、例えば、半導体、半導体ウェハー、CLDやOLED等の表示デバイス、水晶デバイス、各種センサー、インクジェットヘッド、各種MEMSデバイス等が挙げられる。
An electronic
また、支持台2200には、支持台2200に対してY軸方向に移動可能なYステージ2210が設けられており、Yステージ2210には、Yステージ2210に対してX軸方向に移動可能なXステージ2220が設けられており、Xステージ2220には、Xステージ2220に対してZ軸方向に移動可能な電子部品保持部2230が設けられている。
The support table 2200 is provided with a
また、図14に示すように、電子部品保持部2230は、X軸方向およびY軸方向に移動可能な微調整プレート2231と、微調整プレート2231に対してZ軸まわりに回動可能な回動部2232と、回動部2232に設けられ、電子部品Qを保持する保持部2233と、を有している。また、電子部品保持部2230には、微調整プレート2231をX軸方向に移動させるための圧電アクチュエーター1(1x)と、微調整プレート2231をY軸方向に移動させるための圧電アクチュエーター1(1y)と、回動部2232をZ軸まわりに回動させるための圧電アクチュエーター1(1θ)と、が内蔵されている。
As shown in FIG. 14, the electronic
以上のような電子部品搬送装置2000は、圧電アクチュエーター1を備える。このような電子部品搬送装置2000によれば、圧電アクチュエーター1の優れた特性を利用して、電子部品搬送装置2000の特性を高めることができる。
The electronic
4.プリンター
図15は、本発明のプリンターの実施形態を示す斜視図である。
4). Printer FIG. 15 is a perspective view showing an embodiment of a printer of the present invention.
図15に示すプリンター3000は、インクジェット記録方式のプリンターである。このプリンター3000は、装置本体3010と、装置本体3010の内部に設けられている印刷機構3020、給紙機構3030および制御部3040と、を備えている。
A
装置本体3010には、記録用紙Pを設置するトレイ3011と、記録用紙Pを排出する排紙口3012と、液晶ディスプレイ等の操作パネル3013とが設けられている。
The apparatus
印刷機構3020は、ヘッドユニット3021と、キャリッジモーター3022と、キャリッジモーター3022の駆動力によりヘッドユニット3021を往復動させる往復動機構3023と、を備えている。ヘッドユニット3021は、インクジェット式記録ヘッドであるヘッド3021aと、ヘッド3021aにインクを供給するインクカートリッジ3021bと、ヘッド3021aおよびインクカートリッジ3021bを搭載したキャリッジ3021cと、を有している。往復動機構3023は、キャリッジ3021cを往復移動可能に支持しているキャリッジガイド軸3023bと、キャリッジモーター3022の駆動力によりキャリッジ3021cをキャリッジガイド軸3023b上で移動させるタイミングベルト3023aと、を有している。
The
給紙機構3030は、互いに圧接している従動ローラー3031および駆動ローラー3032と、駆動ローラー3032を駆動する給紙モーターである圧電駆動装置100(圧電アクチュエーター1)と、を有している。
The
制御部3040は、例えばパーソナルコンピュータ等のホストコンピュータから入力された印刷データに基づいて、印刷機構3020や給紙機構3030等を制御する。
The
このようなプリンター3000では、給紙機構3030が記録用紙Pを一枚ずつヘッドユニット3021の下部近傍へ間欠送りする。このとき、ヘッドユニット3021が記録用紙Pの送り方向とほぼ直交する方向に往復移動して、記録用紙Pへの印刷が行なわれる。
In such a
以上のようなプリンター3000は、圧電アクチュエーター1を備える。このようなプリンター3000によれば、圧電アクチュエーター1の優れた特性を利用して、プリンター3000の特性を高めることができる。
The
5.プロジェクター
図16は、本発明のプロジェクターの実施形態を示す模式図である。
5. Projector FIG. 16 is a schematic diagram showing an embodiment of a projector of the present invention.
図16に示すプロジェクター4000は、赤色光を出射する光源4100Rと、緑色光を出射する光源4100Gと、青色光を出射する光源4100Bと、レンズアレイ4200R、4200G、4200Bと、透過型の液晶ライトバルブ(光変調部)4300R、4300G、4300Bと、クロスダイクロイックプリズム4400と、投射レンズ(投射部)4500と、圧電駆動装置4700と、を有している。
A
光源4100R、4100G、4100Bから出射された光は、各レンズアレイ4200R、4200G、4200Bを介して、液晶ライトバルブ4300R、4300G、4300Bに入射する。各液晶ライトバルブ4300R、4300G、4300Bは、入射した光をそれぞれ画像情報に応じて変調する。
Light emitted from the
各液晶ライトバルブ4300R、4300G、4300Bによって変調された3つの色光は、クロスダイクロイックプリズム4400に入射して合成される。クロスダイクロイックプリズム4400によって合成された光は、投射光学系である投射レンズ4500に入射する。投射レンズ4500は、液晶ライトバルブ4300R、4300G、4300Bによって形成された像を拡大して、スクリーン4600(表示面)に投射する。これにより、スクリーン4600上に所望の映像が映し出される。ここで、投射レンズ4500は、圧電アクチュエーター1を有する圧電駆動装置4700に支持されており、圧電駆動装置4700の駆動により位置および姿勢の変更(位置決め)が可能となっている。これにより、スクリーン4600に投射される映像の形状や大きさ等を調整することができる。
The three color lights modulated by the liquid
なお、上述の例では、光変調部として透過型の液晶ライトバルブを用いたが、液晶以外のライトバルブを用いてもよいし、反射型のライトバルブを用いてもよい。このようなライトバルブとしては、例えば、反射型の液晶ライトバルブや、デジタルマイクロミラーデバイス(Digital Micromirror Device)が挙げられる。また、投射光学系の構成は、使用されるライトバルブの種類によって適宜変更される。また、プロジェクターとしては、光をスクリーン上で走査させることにより、表示面に所望の大きさの画像を表示させる走査型のプロジェクターであってもよい。 In the above-described example, a transmissive liquid crystal light valve is used as the light modulation unit, but a light valve other than liquid crystal may be used, or a reflective light valve may be used. Examples of such a light valve include a reflective liquid crystal light valve and a digital micromirror device. Further, the configuration of the projection optical system is appropriately changed depending on the type of light valve used. Further, the projector may be a scanning projector that displays an image of a desired size on the display surface by scanning light on a screen.
以上のように、プロジェクター4000は、圧電アクチュエーター1を備える。このようなプロジェクター4000によれば、圧電アクチュエーター1の優れた特性を利用して、プロジェクター4000の特性を高めることができる。
As described above, the
以上、本発明の圧電アクチュエーター、圧電駆動装置、ロボット、電子部品搬送装置、プリンターおよびプロジェクターを、図示の実施形態に基づいて説明したが、本発明は、これに限定されるものではなく、各部の構成は、同様の機能を有する任意の構成のものに置換することができる。また、本発明に、他の任意の構成物が付加されていてもよい。また、各実施形態を適宜組み合わせてもよい。 As described above, the piezoelectric actuator, the piezoelectric driving device, the robot, the electronic component conveying device, the printer, and the projector according to the present invention have been described based on the illustrated embodiment, but the present invention is not limited to this, The configuration can be replaced with any configuration having a similar function. In addition, any other component may be added to the present invention. Moreover, you may combine each embodiment suitably.
また、前述した実施形態では圧電アクチュエーターを圧電駆動装置(圧電モーター)、ロボット、電子部品搬送装置、プリンターおよびプロジェクターに適用した構成について説明したが、圧電アクチュエーターは、これら以外の各種電子デバイスにも適用することができる。 In the above-described embodiment, the configuration in which the piezoelectric actuator is applied to a piezoelectric driving device (piezoelectric motor), a robot, an electronic component conveying device, a printer, and a projector has been described. However, the piezoelectric actuator is also applicable to various other electronic devices. can do.
1…圧電アクチュエーター、2…第1振動板、3…第2振動板、4…圧電素子、4a…圧電素子、4b…圧電素子、4c…圧電素子、4d…圧電素子、4e…圧電素子、4f…圧電素子、5…中間部材、6…単位構造、7…配線層、8…配線層、11…振動部、12…支持部、13…接続部、14…伝達部、24…絶縁層、34…絶縁層、41…圧電体、42…第1電極、42a…第1電極、42b…第1電極、42c…第1電極、42d…第1電極、42e…第1電極、43…第2電極、44…第3電極、51…本体、52…絶縁層、53…配線、61…接着剤、62…接着剤、71…第1電極、72…第1配線、81…第2電極、82…第2配線、91…端子、92…端子、100…圧電駆動装置、110…ローター、111…外周面、141…基部、141a…一面、142…突出部、143…当接面、1000…ロボット、1010…ベース、1020…アーム、1030…アーム、1040…アーム、1050…アーム、1060…アーム、1070…アーム、1080…制御部、1090…エンドエフェクター、2000…電子部品搬送装置、2100…基台、2110…上流側ステージ、2120…下流側ステージ、2130…検査台、2200…支持台、2210…Yステージ、2220…Xステージ、2230…電子部品保持部、2231…微調整プレート、2232…回動部、2233…保持部、3000…プリンター、3010…装置本体、3011…トレイ、3012…排紙口、3013…操作パネル、3020…印刷機構、3021…ヘッドユニット、3021a…ヘッド、3021b…インクカートリッジ、3021c…キャリッジ、3022…キャリッジモーター、3023…往復動機構、3023a…タイミングベルト、3023b…キャリッジガイド軸、3030…給紙機構、3031…従動ローラー、3032…駆動ローラー、3040…制御部、4000…プロジェクター、4100B…光源、4100G…光源、4100R…光源、4200B…レンズアレイ、4200G…レンズアレイ、4200R…レンズアレイ、4300B…液晶ライトバルブ、4300G…液晶ライトバルブ、4300R…液晶ライトバルブ、4400…クロスダイクロイックプリズム、4500…投射レンズ、4600…スクリーン、4700…圧電駆動装置、CP…中心、D1…垂直方向、D2…送り方向、D3…押圧方向、F1…第1平面、F2…振動面、O…回動軸、P…記録用紙、PSa…節、PSb…節、PSc…節、Q…電子部品
DESCRIPTION OF
Claims (12)
前記振動板に積層され、圧電体と、前記圧電体の一方の面上に配置され駆動信号が入力される第1電極と、前記圧電体の他方の面上に配置され基準電位に接続される第2電極と、を備える圧電素子と、
前記圧電素子に配置され、被駆動部材に当接する当接面を含む先端チップと、
を有し、
前記第1電極に直交する第1平面で前記当接面を切断したときの第1断面形状が、曲率を有していることを特徴とする圧電アクチュエーター。 A diaphragm,
Laminated on the diaphragm, the piezoelectric body, a first electrode disposed on one surface of the piezoelectric body and receiving a drive signal, and disposed on the other surface of the piezoelectric body and connected to a reference potential A piezoelectric element comprising: a second electrode;
A tip having a contact surface disposed on the piezoelectric element and contacting the driven member;
Have
The piezoelectric actuator according to claim 1, wherein the first cross-sectional shape when the contact surface is cut along a first plane orthogonal to the first electrode has a curvature.
前記第1電極と前記第2電極とを結ぶ方向に振動するように構成されている請求項1ないし4のいずれか1項に記載の圧電アクチュエーター。 When the drive signal is input to the first electrode and the second electrode is connected to the reference potential,
The piezoelectric actuator according to claim 1, wherein the piezoelectric actuator is configured to vibrate in a direction connecting the first electrode and the second electrode.
前記第1振動板および前記第2振動板は、厚さが異なる請求項1ないし6のいずれか1項に記載の圧電アクチュエーター。 As the diaphragm, having a first diaphragm and a second diaphragm disposed on the opposite side through the piezoelectric element,
The piezoelectric actuator according to claim 1, wherein the first diaphragm and the second diaphragm have different thicknesses.
前記圧電アクチュエーターにより駆動される被駆動部材と、を備えることを特徴とする圧電駆動装置。 A piezoelectric actuator according to any one of claims 1 to 7,
And a driven member driven by the piezoelectric actuator.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018028549A JP2019146365A (en) | 2018-02-21 | 2018-02-21 | Piezoelectric actuator, piezoelectric drive device, robot, electronic component transfer device, printer, and projector |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018028549A JP2019146365A (en) | 2018-02-21 | 2018-02-21 | Piezoelectric actuator, piezoelectric drive device, robot, electronic component transfer device, printer, and projector |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019146365A true JP2019146365A (en) | 2019-08-29 |
| JP2019146365A5 JP2019146365A5 (en) | 2021-02-25 |
Family
ID=67774071
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018028549A Withdrawn JP2019146365A (en) | 2018-02-21 | 2018-02-21 | Piezoelectric actuator, piezoelectric drive device, robot, electronic component transfer device, printer, and projector |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2019146365A (en) |
-
2018
- 2018-02-21 JP JP2018028549A patent/JP2019146365A/en not_active Withdrawn
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6828342B2 (en) | Manufacturing methods for piezoelectric actuators, piezoelectric motors, robots, electronic component transfer devices, printers and piezoelectric actuators | |
| US10179405B2 (en) | Piezoelectric drive device, robot, and drive method thereof | |
| US11205974B2 (en) | Piezoelectric driving device, piezoelectric motor, robot, electronic component conveyance apparatus, printer, and projector | |
| JP2018038188A (en) | Vibrator, piezoelectric actuator, piezoelectric motor, robot, electronic component transfer device, and method of manufacturing vibrator | |
| CN109309458B (en) | Piezoelectric driving device, driving method thereof, robot, and electronic component transfer device | |
| US11133453B2 (en) | Piezoelectric driving device, piezoelectric motor, robot, electronic-component conveying apparatus, printer, and projector | |
| JP2018074723A (en) | Drive device, piezoelectric motor, robot, electronic component transfer device, and printer | |
| JP7077682B2 (en) | Piezoelectric drives, robots, electronic component conveyors, printers and projectors | |
| JP2019114671A (en) | Piezoelectric actuator, piezoelectric drive device, robot, electronic component transfer device, printer and projector | |
| JP2019146365A (en) | Piezoelectric actuator, piezoelectric drive device, robot, electronic component transfer device, printer, and projector | |
| JP2019146435A (en) | Piezoelectric drive device, method for controlling piezoelectric actuator, robot, electronic component conveying device, printer, and projector | |
| JP2018057148A (en) | Oscillator, piezoelectric actuator, piezoelectric motor, robot, electronic component transfer device, and printer | |
| JP2018174640A (en) | Piezoelectric drive device, method for driving piezoelectric drive device, robot, electronic component conveying device, printer, and projector | |
| CN108809141B (en) | Piezoelectric driving device, method of driving piezoelectric driving device, robot, and electronic component transfer device | |
| US11031884B2 (en) | Control device for vibration actuator, method of controlling vibration actuator, robot, electronic component conveyance apparatus, printer, projector, and vibration device | |
| JP2018074011A (en) | Piezoelectric driving device, piezoelectric motor, robot, electronic component conveying device, printer, and method of manufacturing piezoelectric driving device | |
| JP2019117853A (en) | Piezoelectric actuator, piezoelectric drive device, robot, electronic component transfer device, printer, and projector | |
| JP2019068546A (en) | Piezoelectric actuator, piezoelectric driving device, robot, electronic component conveying device, printer, and projector | |
| JP6954007B2 (en) | Piezoelectric drive devices, piezoelectric motors, robots, electronic component transfer devices, printers and projectors | |
| JP2020191767A (en) | Piezoelectric actuator and robot | |
| JP2019160975A (en) | Piezoelectric actuator, additional force detection method of piezoelectric actuator, resonance state detection method of piezoelectric actuator, piezoelectric drive device, hand, robot, electronic component transfer device, printer and projector | |
| JP2018019540A (en) | Piezoelectric actuator, piezoelectric motor, robot, and electronic component conveyance device | |
| JP2018037507A (en) | Vibrator, piezoelectric actuator, piezoelectric motor, robot, and electronic component transfer device | |
| JP2018074773A (en) | Driving device, piezoelectric motor, robot, electronic component conveying device, and printer | |
| JP2020107657A (en) | Piezoelectric element unit, piezoelectric drive device, piezoelectric element unit manufacturing method, and robot |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20180910 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20181121 |
|
| RD07 | Notification of extinguishment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7427 Effective date: 20200807 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210113 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210113 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210913 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20210916 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210921 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20211108 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20211122 |