JP2019129973A - Indwelling apparatus and indwelling apparatus set - Google Patents
Indwelling apparatus and indwelling apparatus set Download PDFInfo
- Publication number
- JP2019129973A JP2019129973A JP2018014099A JP2018014099A JP2019129973A JP 2019129973 A JP2019129973 A JP 2019129973A JP 2018014099 A JP2018014099 A JP 2018014099A JP 2018014099 A JP2018014099 A JP 2018014099A JP 2019129973 A JP2019129973 A JP 2019129973A
- Authority
- JP
- Japan
- Prior art keywords
- cover
- needle
- base
- base member
- cover member
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



















Abstract
Description
本開示は、生体表面に留置された状態で使用可能な留置装置、及び当該留置装置を備える留置装置セットに関する。 The present disclosure relates to an indwelling device that can be used while being indwelled on a biological surface, and an indwelling device set including the indwelling device.
従来から、針部材を備え、患者などの被検者の生体表面から当該針部材を穿刺し、留置させて使用する留置装置が知られている。例えば、生体表面からセンサを含む針部材を穿刺し、被検者の血液又は間質液等の体液中の被計測物質(例えば、グルコースやpH、生理活性物質、タンパク質等)を当該センサによって検出することが行われている。 DESCRIPTION OF RELATED ART Conventionally, the indwelling apparatus which is provided with a needle member and punctures the said needle member from the living body surface of subjects, such as a patient, and is used is known. For example, a needle member including a sensor is punctured from the surface of a living body, and a substance to be measured (eg, glucose, pH, physiologically active substance, protein, etc.) in a body fluid such as blood or interstitial fluid of the subject is detected by the sensor. To be done.
例えば、特許文献1には、先端に針部材を有する挿入補助具を生体表面に穿刺することで、センサを生体表面から生体内に挿入して留置する装置が開示されている。
For example,
上述した従来の留置装置では、使用後に、針部材が穿刺されたままの状態で、例えば、生体表面から剥がし取ることで、生体表面から取り外す。この場合、針部材が軸方向以外の方向に回動しようとするため、生体を損傷する虞があった。 In the conventional indwelling device described above, after use, the needle member is removed from the living body surface, for example, by peeling off from the living body surface with the needle member being punctured. In this case, since the needle member tries to rotate in a direction other than the axial direction, there is a risk of damaging the living body.
本開示の目的は、上記問題に鑑み、生体表面から取り外す際に、針部材による生体への損傷を抑制することができる留置装置及び留置装置セットを提供することである。 In view of the above problems, an object of the present disclosure is to provide an indwelling device and an indwelling device set capable of suppressing damage to a living body due to a needle member when the surface is removed from the surface of the living body.
本発明の第1の態様としての留置装置は、針部材を備え、生体表面に留置されて前記針部材が生体表面に穿刺された状態で使用可能な留置装置であって、生体表面に固定可能なベース部材と、前記ベース部材に装着可能なカバー部材と、を備え、前記ベース部材は、前記針部材を軸方向に移動可能に支持し、前記カバー部材が前記ベース部材から取り外されると、前記針部材が前記カバー部材と係合して基端側に移動する。 An indwelling apparatus as a first aspect of the present invention is an indwelling apparatus that includes a needle member, can be used in a state in which the needle member is indwelled on the surface of a living body, and can be fixed to the surface of the living body. A base member and a cover member attachable to the base member, the base member supports the needle member so as to be movable in the axial direction, and when the cover member is removed from the base member, The needle member engages with the cover member and moves to the proximal end side.
本発明の一実施形態としての留置装置は、前記カバー部材が前記ベース部材に装着されると、前記針部材が前記カバー部材と係合して先端側に移動する。 In the indwelling device as one embodiment of the present invention, when the cover member is attached to the base member, the needle member engages with the cover member and moves to the distal end side.
本発明の一実施形態としての留置装置において、前記ベース部材は、基端側に移動した前記針部材を固定する。 In the indwelling apparatus as one embodiment of the present invention, the base member fixes the needle member moved to the proximal end side.
本発明の一実施形態としての留置装置において、前記ベース部材は、前記針部材を支持する支持部と、前記支持部を前記針部材の軸方向に移動させる可動部と、を備える。 In the indwelling apparatus as one embodiment of the present invention, the base member includes a support portion that supports the needle member, and a movable portion that moves the support portion in the axial direction of the needle member.
本発明の一実施形態としての留置装置において、前記針部材はセンサ電極を備え、前記カバー部材は通信装置を備え、前記カバー部材が前記ベース部材に装着された状態で、前記センサ電極は前記通信装置と電気的に接続される。 In the indwelling device as one embodiment of the present invention, the needle member includes a sensor electrode, the cover member includes a communication device, and the sensor electrode is connected to the base member in a state where the cover member is attached to the base member. Electrically connected to the device.
本発明の第2の態様としての留置装置セットは、前記留置装置と、前記ベース部材を保持可能なベース補助部材と、前記カバー部材を保持可能なカバー補助部材と、を備え、前記ベース補助部材及び前記カバー補助部材は、前記カバー部材を、前記ベース部材に対して前記針部材の軸方向に沿って移動可能に支持する。 The indwelling device set as a second aspect of the present invention includes the indwelling device, a base auxiliary member capable of holding the base member, and a cover auxiliary member capable of holding the cover member, and the base auxiliary member The cover auxiliary member supports the cover member so as to be movable along the axial direction of the needle member with respect to the base member.
本発明の一実施形態としての留置装置セットにおいて、前記カバー部材を保持した前記カバー補助部材、及び、前記ベース部材を保持した前記ベース補助部材は、前記カバー部材が前記ベース部材に装着されていない状態で、互いに係合する第1組立状態と、前記カバー部材が前記ベース部材に装着された状態で、互いに係合する第2組立状態と、を取ることが可能である。 In the indwelling device set as one embodiment of the present invention, the cover auxiliary member holding the cover member and the base auxiliary member holding the base member are not attached to the base member. It is possible to take a first assembled state that engages with each other in a state, and a second assembled state that engages with each other with the cover member mounted on the base member.
本開示の留置装置及び留置装置セットによると、生体表面から取り外す際に、針部材による生体への損傷を抑制することができる。 According to the indwelling device and the indwelling device set of the present disclosure, it is possible to suppress damage to the living body due to the needle member when removing from the surface of the living body.
以下、本発明の一実施形態について、図面を参照して説明する。各図において共通の部材には、同一の符号を付している。本明細書において、「上方」とは、後述するベース部材やカバー部材の上面側(図1等の上側)を意味し、「下方」とは、ベース部材やカバー部材の下面側(図1等の下側)を意味する。 Hereinafter, an embodiment of the present invention will be described with reference to the drawings. In each figure, the same code | symbol is attached | subjected to the common member. In this specification, “upper” means the upper surface side (upper side of FIG. 1 and the like) of a base member and cover member, which will be described later, and “lower” means the lower surface side of the base member and cover member (FIG. 1 and the like). Lower side).
(第1実施形態)
[留置装置1の構成]
図1は、本発明の第1実施形態としての留置装置1を示す断面図である。図1に示すように、留置装置1は、ベース部材10aと、針部材50aと、カバー部材30aと、を備える。留置装置1は、被検者の体表面等の生体表面に留置されて、針部材50aが生体表面に穿刺された状態で、使用することができる。図1に示す留置装置1は、使用前の状態であり、カバー部材30aがベース部材10aに取り付けられる前の状態を示している。
(First embodiment)
[Configuration of Indwelling Device 1]
FIG. 1 is a cross-sectional view showing an
ベース部材10aは、上面11及び下面12に連通する中空部13を内部に区画する。中空部13には、針部材50aが、その軸方向Aを中空部13の連通方向と一致させた向きで配置される。本実施形態では、中空部13に配置された針部材50aは、中空部13を区画する内面14と接触し、内面14に保持されている。これにより、針部材50aは、ベース部材10aに支持される。また、針部材50aは、中空部13を区画する内面14と摺動し、ガイドされることで、軸方向Aに移動可能である。このようにして、本実施形態の針部材50aは、ベース部材10aに対して、軸方向Aに移動可能に支持されている。本実施形態のベース部材10aは、上面11及び下面12を構成する底板26と、この底板26の軸方向Aに直交する方向(以下、「直交方向B」と記載する。)における端部付近から、上面11側に突出する第1外壁15と、を備える。
The
ベース部材10aの下面12には、ベース部材10aを被検者の体表面等の生体表面に貼付可能な程度に粘着力を生じさせる粘着剤が塗布されている。具体的には、下面12における体表面に対する粘着力は、被検者が留置装置1を使用する期間(例えば数日から数週間程度)にわたって、留置装置1が被検者の体表面から剥がれない程度に強力であることが好ましく、通常の傷絆創膏等に比べて強力である。下面12における体表面に対する粘着力は、被検者が留置装置1を使用する期間にわたって体表面に対する一定の粘着性を維持しつつ、留置装置1を体表面から剥がす際に、被検者に痛みを与えにくい程度であることが好ましく、かつ、カバー部材30aをベース部材10aから取り外す際の摺動抵抗(針部材50aと中空部13の内面14との摺動抵抗、ベース部材10aとカバー部材30aとの摺動抵抗、及び、針部材50aを体表面から抜くときの摺動抵抗、を含む)よりも強力である。
The
下面12に塗布される粘着剤としては、例えばシリコーン系粘着剤、アクリル系粘着剤、又はゴム系(天然ゴム若しくは合成ゴム等)粘着剤を使用することができる。但し、粘着剤は、ここに列挙したものに限られない。下面12は、留置装置1の使用前の状態では、剥離紙等により覆われており、使用時には剥がされる。
As the pressure-sensitive adhesive applied to the
針部材50aは、軸方向Aに沿って延在する線状の針本体51aと、針本体51aの基端(図1では上端)に固定されたハブ52aと、を備える。
The
針本体51aは、軸方向Aがベース部材10aの中空部13の連通方向と一致する向きで、中空部13に一部が挿入された状態で配置される。針本体51aは、ベース部材10aの中空部13を区画する内面14に沿って摺動することで、軸方向Aに移動可能である。詳細には、針本体51aの先端は、ベース部材10aの中空部13内に位置する状態と、ベース部材10aの下面12から突出する状態と、を取り得る。図1に示すように、カバー部材30aがベース部材10aに装着される前の状態(以下、「未装着状態」と記載する。)では、針本体51aの先端は、ベース部材10aの中空部13内に位置する。針本体51aの先端は、生体表面に穿刺可能な程度に鋭利に形成されている。
The
ハブ52aは、針本体51aの長軸方向、すなわち軸方向Aに対して直交する直交方向Bに突出する突起部53を備える。ハブ52aは、ベース部材10aの中空部13よりも上面11側(軸方向Aに沿う上側C)に位置する。本実施形態のハブ52aの突起部53を含む直交方向Bの最大幅は、中空部13の直交方向Bの最大幅よりも大きい。
The
本実施形態の針部材50aは、センサ電極を備えてもよい。具体的には、例えば、本実施形態の針本体51aは、筒状の中空針で形成され、本実施形態のハブ52aは、針本体51aの中空部に連通する中空部を区画し、センサ電極が針本体51aの中空部及びハブ52aの中空部に位置する。針本体51aには、例えば中空部と外部とを連通する貫通孔が形成され、生体表面に穿刺された状態で、被検者の体液が先端開口及び貫通孔を通じて中空部に導入される。センサ電極は、例えば、作用極、参照極及び対極であり、作用極、参照極及び対極は互いに協働して、被計測物質の量又は濃度に応じた電気的信号を検出する。センサ電極は、ハブ52aの中空部を通じて、ハブ52aの上面に露出する接続部と電気的に接続されている。針本体51aの材料としては、例えば、ステンレス鋼、アルミニウム、アルミニウム合金、チタン、チタン合金等の金属材料を用いることができる。
The
本実施形態のカバー部材30aは、天板46と、この天板46の下面31側に突出する突出部32と、突出部32の周囲で天板46の下面31側に突出する爪部33と、を備える。また、カバー部材30aは、天板46の下面31の端部から、下面31側に突出する第2外壁34を備える。カバー部材30aは、ベース部材10aに装着可能である。
The
本実施形態のカバー部材30aは、通信装置を備えてもよい。具体的には、例えば、本実施形態のカバー部材30aは、内部に位置する通信装置と、通信装置に電気的に接続され、突出部32の下面に露出する接続部と、を備える。通信装置は、プロセッサ、通信デバイス、メモリ及び電池等により構成される。詳細は後述するが、カバー部材30aがベース部材10aに装着された状態(以下、「装着状態」と記載する。)で、針部材50aが備えるセンサ電極は、通信装置と電気的に接続される。
The
[留置装置1の着脱方法]
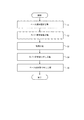
図2は、留置装置1の着脱方法の各工程を示すフローチャートである。図2に示すように、留置装置1の着脱方法は、ベース部材固定工程S1と、カバー部材装着工程S2と、使用工程S3と、カバー部材取り外し工程S4と、ベース部材取り外し工程S5と、を含む。
[Method of attaching / detaching indwelling device 1]
FIG. 2 is a flowchart showing each step of the method for attaching and detaching the
図3は、留置装置1の着脱方法のベース部材固定工程S1を模式的に示す図である。図3に示すように、ベース部材固定工程S1では、図1に示した未装着状態のベース部材10aの下面12を生体表面Sに貼付して、ベース部材10aを生体表面Sに固定する。このとき、上述した通り、針部材50aの先端は、ベース部材10aの中空部13内に位置する。すなわち、針部材50aの先端は、ベース部材10aの下面12から突出していない。
FIG. 3 is a diagram schematically illustrating the base member fixing step S <b> 1 of the method for attaching and detaching the
図4及び図5は、留置装置1の着脱方法のカバー部材装着工程S2を模式的に示す図である。図4及び図5に示すように、カバー部材装着工程S2では、図3に示したベース部材固定工程S1で生体表面Sに固定したベース部材10aに、カバー部材30aを装着する。詳細には、まず、図4に示すように、カバー部材30aを、下面31がベース部材10aの上面11に向かい合うようにして、軸方向Aに沿ってベース部材10aに向けて下方に移動させる。このとき、カバー部材30aは、ベース部材10aの第1外壁15の外周にガイドされる。その後、カバー部材30aの突出部32及び爪部33が、針部材50aのハブ52aに係合し、針部材50aが先端側に押圧される。詳細には、突出部32はハブ52aの上面に接触し、爪部33はハブ52aの突起部53に係合する。このとき、ベース部材10aは生体表面Sに固定されているため、針部材50aはベース部材10aに対して先端側に移動する。これにより、図5に示すように、針部材50aは生体表面Sに穿刺される。図5に示すように、針部材50aが生体表面Sに穿刺されると同時に、カバー部材30aはベース部材10aに装着される。本実施形態では、図5に示すように、カバー部材30aの第2外壁34とベース部材10aの第1外壁15とが、摩擦力等によって互いに係合することで、カバー部材30aがベース部材10aに装着される。カバー部材30aの第2外壁34、及び、ベース部材10aの第1外壁15、の一方に爪部を設け、他方に爪部が入り込む係止溝部を設け、爪部と係止溝部を係合することで装着する構成としてもよい。
4 and 5 are diagrams schematically illustrating the cover member mounting step S2 of the method for attaching and detaching the
図5に示すように、カバー部材装着工程S2の後、すなわち、留置装置1が生体表面Sに留置されて針部材50aが生体表面Sに穿刺された状態で、留置装置1が使用可能となる(使用工程S3)。例えば、留置装置1は、針部材50aがセンサ電極を備える場合、センサ電極を用いて、被計測物質に関する情報を測定する。図5に示すように、装着状態では、針部材50aのハブ52aの上面と、カバー部材30aの突出部32の下面と、が互いに接触することで、針部材50aが備えるセンサ電極は、カバー部材30aが備える通信装置と電気的に接続可能となる。針部材50aが生体表面Sに穿刺された状態では、センサ電極は、針部材50aの中空部に導入された被検者の体液に含まれる被計測物質の量又は濃度に応じた電気的信号を検出する。検出された電気的信号は、通信装置に送信される。通信装置は、受信した電気的信号に応じた通信信号を生成し、外部の表示デバイス等に送信することができる。
As shown in FIG. 5, the
図6及び図7は、留置装置1の着脱方法のカバー部材取り外し工程S4を模式的に示す図である。図6及び図7に示すように、留置装置1の使用が終了すると、図5に示した留置装置1の装着状態を解除して、カバー部材30aをベース部材10aから取り外す。詳細には、まず、図6に示すように、カバー部材30aを、軸方向Aに沿ってベース部材10aから離隔するように上方に移動させる。これにより、カバー部材30aの第2外壁34とベース部材10aの第1外壁15との係合が解除される。このとき、カバー部材30aの突出部32及び爪部33と、針部材50aのハブ52aと、の間の係合は解除されず、針部材50aが軸方向Aに沿って基端側に移動する。これにより、針部材50aは生体表面Sから抜去される。このとき、針部材50aは、先端が中空部13内に位置する状態で、中空部13を区画する内面14によって、支持される。その後、図7に示すように、カバー部材30aの突出部32及び爪部33と、針部材50aのハブ52aと、の間の係合を解除して、カバー部材30aを針部材50aから取り外す。
6 and 7 are diagrams schematically showing the cover member removing step S4 of the method for attaching and detaching the
図8は、留置装置1の着脱方法のベース部材取り外し工程S5を模式的に示す図である。図8に示すように、カバー部材30a(図7等参照)が取り外され、針部材50aが生体表面Sから抜去された後のベース部材10aを、生体表面Sから取り外す。ベース部材10aは、例えば、図8に示すように、直交方向Bの一端(図8の左端)を引き上げて、下面12が直交方向Bに沿って生体表面Sから順次剥がし取るようにして、生体表面Sから取り外される。
FIG. 8 is a diagram schematically showing the base member removal step S5 of the method for attaching and detaching the
上述のように、本実施形態の留置装置1では、カバー部材30aがベース部材10aから取り外されると、針部材50aがカバー部材30aと係合して基端側に移動する。したがって、留置装置1を生体表面Sから取り外す際に、カバー部材30aをベース部材10aから取り外すのに連動して針部材50aが基端側に移動して生体表面Sから抜去されるため、針部材50aによる生体への損傷を抑制することができる。すなわち、ベース部材10aを生体表面Sから取り外す前に、針部材50aを生体表面Sから抜去することで、生体への損傷を抑制することができる。また、カバー部材30aをベース部材10aから取り外す動作に連動して、針部材50aを生体表面Sから抜去することができるため、操作性を向上させることができる。
As described above, in the
上述のように、本実施形態の留置装置1では、カバー部材30aがベース部材10aに装着されると、針部材50aがカバー部材30aと係合して先端側に移動する。したがって、留置装置1を生体表面Sに取り付ける際に、生体表面Sに固定されたベース部材10aにカバー部材30aを装着するのに連動して針部材50aが先端側に移動して生体表面Sに穿刺されるため、操作性を向上させることができる。
As described above, in the
(第2実施形態)
[留置装置2の構成]
図9は、本発明の第2実施形態としての留置装置2の装着状態、すなわち、カバー部材30bがベース部材10bに装着されている状態を示す斜視図である。図10は、留置装置2の、未装着状態、すなわち、カバー部材30bがベース部材10bに装着される前の状態での斜視図である。図11は、留置装置2の、未装着状態での断面図である。
(Second Embodiment)
[Configuration of Indwelling Device 2]
FIG. 9 is a perspective view showing a mounting state of the indwelling device 2 as the second embodiment of the present invention, that is, a state where the
図9〜図11に示すように、留置装置2は、ベース部材10bと、針部材50bと、カバー部材30bと、を備える。留置装置2は、上述した第1実施形態としての留置装置1と同様に、被検者の体表面等の生体表面に留置されて、針部材50bが生体表面に穿刺された状態で、使用することができる。
As shown in FIGS. 9 to 11, the indwelling device 2 includes a
図10及び図11に示すように、ベース部材10bは、平板状の底板26と、底板26の外縁に沿って、底板26の延在方向と直交する一方向(図11の上方)に延設された第1外壁15と、を備える。底板26は、図10に示すように、上面視で略円形状である。また、ベース部材10bは、第1外壁15に包囲される領域に、底板26から第1外壁15と同じ方向に突設された、筒状の外筒部18及び筒状の内筒部19を備える。図11に示すように、内筒部19は、外筒部18に包囲される領域に位置する。さらに、ベース部材10bは、外筒部18の内周側に位置する筒状の可動部17と、可動部17の内周側に位置する筒状の支持部16と、を備える。支持部16、可動部17、外筒部18、及び内筒部19は、それぞれの軸方向が一致するように配置されている。支持部16、可動部17、外筒部18、及び内筒部19は、それぞれの軸方向が一致するように同心円状に配置されていると、カバー部材30bとベース部材10bとの操作性がさらに向上する。
As shown in FIGS. 10 and 11, the
図11に示すように、支持部16、可動部17、外筒部18、及び内筒部19は、全体として、中空部13を区画する。中空部13は、内筒部19を通じて、ベース部材10bの下面12に区画された開口20から外部に連通する。
As shown in FIG. 11, the
図11に示すように、支持部16は、針部材50bを支持する。詳細には、支持部16は、中空部13に対して開口20が位置する方向に、針部材50bの先端が向くように、針部材50bを支持する。本実施形態では、支持部16は、後述する針部材50bの針本体51bが内部を延在するように、後述する針部材50bの基端に位置するハブ52bを固定する。図10及び図11に示すように、可動部17は、支持部16を、可動部17に対して軸方向Aに移動可能に支持する。詳細には、可動部17は、支持部16の周囲を可動部17の内周面で覆うように位置することで、支持部16の軸方向A以外への移動を規制する。外筒部18は、可動部17を、外筒部18に対して軸方向Aに移動可能に支持する。詳細には、外筒部18は、可動部17の周囲を外筒部18の内周面で覆うように位置することで、可動部17の軸方向A以外への移動を規制する。このように、外筒部18、可動部17、及び支持部16は、全体として、複数の重なり合う筒状の部材で構成され、軸方向Aに沿って伸縮可能な、いわゆるテレスコピック機構を構成する。これにより、ベース部材10bの筐体を軸方向Aに薄くできる。
As shown in FIG. 11, the
図11に示すように、内筒部19は、針部材50bの軸方向A以外への移動を規制する。詳細には、内筒部19は、内筒部19の内周面によって、後述する針部材50bの針本体51bの周囲を覆う。これにより、内筒部19は、針部材50bの軸方向A以外への移動を規制する。
As shown in FIG. 11, the
ベース部材10bの下面12には、ベース部材10bを、被検者の体表面等の生体表面に貼付可能な程度に粘着力を生じさせる粘着剤が塗布されている。ベース部材10bの下面12に塗布される粘着剤は、上述した第1実施形態のベース部材10aの下面12に塗布される粘着剤と同様であるため、ここでは説明を省略する。
The
図9〜図11に示すように、本実施形態では、ベース部材10bの第1外壁15の所定の位置に、底板26の延在方向外側に向かって突出した爪部21が形成されている。また、図9及び図10に示すように、本実施形態では、ベース部材10bの第1外壁15の外周面の所定の位置に、上方に連通する凹部22が形成されている。
As shown in FIGS. 9-11, in this embodiment, the nail | claw
図11に示すように、針部材50bは、軸方向Aに沿って延在する針本体51bと、針本体51bの基端(図11では上端)に固定されたハブ52bと、を備える。
As shown in FIG. 11, the
図11に示すように、針本体51bは、中空部13に対して開口20が位置する方向に先端が向くように配置される。つまり、針本体51bは、中空部13内を、支持部16、可動部17、外筒部18、及び内筒部19の軸方向に沿って延在している。すなわち、針本体51bの軸方向Aは、支持部16、可動部17、外筒部18、及び内筒部19の軸方向に略一致している。針本体51bは、ハブ52bと連動して、軸方向Aに移動可能である。詳細には、針本体51bの先端は、中空部13のうち内筒部19に区画される空間に位置する状態と、ベース部材10bの下面12から突出する状態と、を取り得る。図11に示す未装着状態では、針本体51bの先端は、内筒部19に区画される空間に位置する。針本体51bの先端は、鋭利に形成されている。
As shown in FIG. 11, the needle
図11に示すように、ハブ52bは、針本体51bの基端を周囲から挟み込むようにして、針本体51bを固定している。図10及び図11に示すように、ハブ52bは、針本体51bよりも直交方向Bに突出する突起部53を備える。ハブ52bの下面には、支持部16が接続されている。
As shown in FIG. 11, the
本実施形態の針部材50bは、センサ電極54を備える。本実施形態の針本体51bは、筒状の中空針で形成され、センサ電極54が針本体51bの中空部に位置する。針本体51bには、例えば中空部と外部とを連通する貫通孔が形成され、生体表面に穿刺された状態で、被検者の体液が先端開口及び貫通孔を通じて中空部に導入される。センサ電極54は、例えば、作用極、参照極及び対極であり、作用極、参照極及び対極は互いに協働して、被計測物質の量又は濃度に応じた電気的信号を検出する。図10に示すように、センサ電極54は、針本体51bの中空部(図11参照)を通じて、ハブ52bの上面に露出する接続部55と電気的に接続されている。針本体51bの材料としては、上述した実施形態1の針本体51aと同様の材料を用いることができる。
The
図9〜図11に示すように、カバー部材30bは、上方に凸となるように湾曲した天板46と、天板46の外縁に沿って天板46の延在方向と直交する一方向(図11の下方)に突設された第2外壁34と、を備える。天板46は、図10に示すように、上面視で略円形状である。また、カバー部材30bは、第2外壁34に包囲される領域に、天板46から第2外壁34と同じ方向に突設された装置カバー部35を備える。装置カバー部35は、図11及び後述する図15に示すように、針部材50bを挿入するための挿入空間36の周囲を包囲するように、形成されている。図11に示すように、天板46のうち、挿入空間36に面する位置には、第2外壁34と同じ方向に延設された突出部32が形成されている。また、装置カバー部35のうち、挿入空間36に面する位置には、爪部33が形成されている。
As shown in FIGS. 9 to 11, the
図11に示すように、本実施形態のカバー部材30bは、通信装置40と、接続部41と、配線板44と、を備える。通信装置40は、装置カバー部35の内部に位置する。通信装置40は、プロセッサ、通信デバイス、メモリ及び電池等により構成される。接続部41は、配線板44を介して通信装置40に電気的に接続され、突出部32の下面に露出している。詳細は後述するが、装着状態で、針部材50bが備えるセンサ電極54は、通信装置40と電気的に接続される。
As shown in FIG. 11, the
図10及び図11に示すように、カバー部材30bの第2外壁34の周方向における所定の位置には、係合孔42が形成されている。係合孔42に、ベース部材10bの爪部21が係合すると、図9に示すように、カバー部材30bがベース部材10bに装着される。つまり、カバー部材30b及びベース部材10bは、係合孔42及び爪部21の周方向の位置を合わせるように、周方向における相対的な位置関係を所定の関係とした状態で、装着可能となる。このように、カバー部材30bは、ベース部材10bに対して所定の回転方向(針部材50bの中心軸線周りの周方向)の位置で、ベース部材10bに装着可能である。
As shown in FIGS. 10 and 11, an
図10に示すように、カバー部材30bの第2外壁34の外周面における、所定の周方向位置には、上方から下方に連通する凹部43が形成されている。
As shown in FIG. 10, a
[留置装置2の着脱方法]
留置装置2の着脱方法は、図2に示した留置装置1の着脱方法と同様に、ベース部材固定工程S1と、カバー部材装着工程S2と、使用工程S3と、カバー部材取り外し工程S4と、ベース部材取り外し工程S5と、を含む。留置装置2の着脱方法は、上記各工程に加えて、後述する図12〜図17に示す各工程を含む。
[Method of attaching / detaching indwelling device 2]
The attachment / detachment method of the indwelling device 2 is the same as the attachment / detachment method of the
図12は、ベース部材10bがベース補助部材60に保持されてなる、ベース部材群70の断面図である。図13は、ベース部材群70の斜め上方から見た斜視図である。図12及び図13に示すように、留置装置2の着脱方法は、ベース部材10bをベース補助部材60に保持させて、ベース部材群70を形成する工程(ベース部材群形成工程)を含む。
FIG. 12 is a cross-sectional view of the
図12及び図13に示すように、ベース補助部材60は、略円筒状の本体部61と、この本体部61の径方向外側を覆うカバー筒部66と、を備える。図13に示すように、本体部61は、内周面側に突設された複数の板バネ62と、内周面の所定の位置に形成された凸部63と、を備える。本体部61は、複数の板バネ62によりベース部材10bの外周を押圧することで、ベース補助部材60の内側に挿入されたベース部材10bを、保持する。このとき、ベース部材10bは、ベース部材10bの第1外壁15の外周面に形成された凹部22がベース補助部材60の凸部63と係合する場合にのみ、ベース補助部材60に保持される。すなわち、ベース補助部材60は、凸部63が凹部22に係合することで、ベース部材10bに対する周方向の位置が位置決めされる。本実施形態では、凸部63が凹部22に係合するようにベース補助部材60のベース部材10bに対する周方向の位置を合わせた状態で、ベース補助部材60を、ベース部材10bの上方からベース部材10bに向けて移動させて、ベース部材群70を形成する。
As shown in FIGS. 12 and 13, the base
図13に示すように、本体部61には、内周面から外周面を貫通する切り欠き部64が形成されている。また、本体部61は、内周面の所定の位置に形成された凸部65を備える。
As shown in FIG. 13, the
図12及び図13に示すように、カバー筒部66は、内周面に形成された突起部67を備える。カバー筒部66は、本体部61に形成された切り欠き部64に突起部67を嵌合させた状態で、本体部61の周囲に位置する外筒である。切り欠き部64の周方向に沿う長さは、突起部67の周方向に沿う長さよりも長い。そのため、カバー筒部66は、突起部67が切り欠き部64内で周方向に移動可能な範囲で、本体部61に対して周方向に回転可能である。
As shown in FIGS. 12 and 13, the
図14は、カバー部材30bが、カバー補助部材80に保持されてなる、カバー部材群90の断面図である。図15は、カバー部材群90の斜め下方から見た斜視図である。図14及び図15に示すように、留置装置2の着脱方法は、カバー部材30bをカバー補助部材80に保持させて、カバー部材群90を形成する工程(カバー部材群形成工程)を含む。
FIG. 14 is a cross-sectional view of the
図14に示すように、カバー補助部材80は、上方に凸となるように湾曲した天板81と、天板81の外縁に沿って天板81の延在方向と直交する一方向(図14の下方)に突設された第3外壁82と、を備える。天板81は、後述する図17に示す上面視で、略円形状である。図15に示すように、第3外壁82には、内周面の所定の周方向位置に凸部83が形成されている。また、図15に示すように、第3外壁82には、外周面の所定の周方向位置に突起部84が形成されている。さらに、図15に示すように、第3外壁82には、外周面の所定の位置で上下に連通する凹部85が形成されている。
As shown in FIG. 14, the cover
図14及び図15に示すように、カバー補助部材80は、第3外壁82の内周面側に挿入されたカバー部材30bを、第3外壁82の内周面と、カバー部材30bの第2外壁34の外周面との間の摩擦力等で、保持する。このとき、カバー部材30bは、カバー部材30bの第2外壁34の外周面に形成された凹部43が、カバー補助部材80の凸部83と係合する場合にのみ、カバー補助部材80に保持される。すなわち、カバー補助部材80は、凸部83が凹部43に係合することで、カバー部材30bに対する周方向の位置が位置決めされる。本実施形態では、凸部83が凹部43に係合するようにカバー補助部材80のカバー部材30bに対する周方向の位置を合わせた状態で、カバー補助部材80を、カバー部材30bの上方からカバー部材30bに向けて移動させて、カバー部材群90を形成する。
As shown in FIGS. 14 and 15, the cover
図16は、ベース部材群70とカバー部材群90との第1組立状態を示す断面図である。図17は、第1組立状態の上面図である。図16及び図17に示すように、留置装置2の着脱方法は、ベース部材群70とカバー部材群90とを第1組立状態にする工程(第1組立工程)を含む。ベース部材群70及びカバー部材群90は、全体として留置装置セット5を構成する。すなわち、留置装置セット5は、ベース部材10bと、カバー部材30bと、ベース補助部材60と、カバー補助部材80と、を備える。
FIG. 16 is a cross-sectional view showing a first assembled state of the
図16及び図17に示すように、第1組立工程では、カバー部材群90を、ベース部材群70の上方からベース補助部材60の本体部61の内周面側に挿入する。このとき、図17に示すように、カバー部材群90は、カバー補助部材80の外周面に形成された凹部85が、ベース補助部材60の凸部65と係合する場合にのみ、ベース補助部材60の本体部61の内周面側に挿入される。すなわち、ベース部材群70は、凸部65が凹部85に係合することで、カバー部材群90に対する周方向の位置が位置決めされる。
As shown in FIGS. 16 and 17, in the first assembly step, the
上述のように位置決めが行われた状態で、カバー部材群90が、ベース補助部材60の本体部61の内周面側に挿入されると、図16に示すように、カバー補助部材80の突起部84が、ベース補助部材60のカバー筒部66の突起部67に当接して、それ以上挿入されない状態(第1組立状態)で保持される。図16に示すように、第1組立状態では、カバー部材30bはベース部材10bに装着されていない。また、第1組立状態では、針部材50bは、カバー部材30bの挿入空間36には挿入されているが、先端側には移動しておらず、ベース部材10bの下面12から突出していない。
When the
このように、図16及び図17に示す第1組立状態では、針部材50bが外部に露出しておらず、各部材の位置関係が安定的に保たれている。したがって、第1組立状態で一体化されたベース部材群70及びカバー部材群90を、安全に移動させることができる。よって、第1組立状態のベース部材10bの下面12を生体表面S(図18等参照)に貼付して、ベース部材10bを生体表面Sに固定することができる(ベース部材固定工程S1)。
Thus, in the 1st assembly state shown in FIG.16 and FIG.17, the
図18は、ベース部材群70とカバー部材群90との第2組立状態を示す断面図である。図18に示すように、留置装置2の着脱方法は、ベース部材群70とカバー部材群90とを第2組立状態にする工程(第2組立工程)を含む。
FIG. 18 is a cross-sectional view showing a second assembled state of the
図18に示すように、第2組立工程では、まず、第1組立状態から、ベース補助部材60のカバー筒部66を、本体部61に対して周方向に回転させる。これにより、カバー筒部66の突起部67(図16等参照)は、回転により、図18に示す断面以外の位置に移動する。したがって、カバー補助部材80の突起部84が突起部67に当接しない状態になる。そのため、カバー部材群90は、カバー部材30bがベース部材群70のベース部材10bに近づく方向(軸方向Aに沿う下側D)に更に挿入可能となる。カバー部材群90を更に挿入させると、カバー部材30bの突出部32及び爪部33が、針部材50bのハブ52bに係合し、針部材50bが先端側に押圧される。詳細には、突出部32はハブ52bの上面に係合し、爪部33はハブ52bの突起部53に係合する。このとき、ベース部材10bは生体表面Sに固定されているため、針部材50bがベース部材10bに対して先端側に移動する。このとき、ベース補助部材60の本体部61が、カバー部材30bを穿刺方向(軸方向Aに沿う下側D)に移動する際のガイドとして機能する。これにより、図18に示すように、針部材50bは生体表面Sに穿刺される。円筒状のベース補助部材60がカバー補助部材80の周面をガイドすることで、カバー部材30bが、ベース部材10bに対して軸方向Aに沿って移動可能に支持されるため、穿刺動作がより安定化する。図18に示すように、針部材50bが生体表面Sに穿刺されると同時に、カバー部材30bがベース部材10bに装着される。本実施形態では、カバー部材30bの係合孔42に、ベース部材10bの爪部21が係合することで、カバー部材30bがベース部材10bに装着される(第2組立状態)。従って、カバー部材群90及びベース部材群70は、カバー部材30bがベース部材10bに装着されていない状態で、互いに係合する第1組立状態と、カバー部材30bがベース部材10bに装着された状態で、互いに係合する第2組立状態と、を取ることが可能である。このように、カバー補助部材80及びベース補助部材60を更に用いることで、被検者がカバー部材30bをベース部材10bに取り付ける際や穿刺操作を行う際の扱いやすさが向上する。
As shown in FIG. 18, in the second assembly step, first, the
図19は、第2組立状態からベース補助部材60及びカバー補助部材80を取り除いて得られる留置装置2を示す断面図である。図19に示すように、留置装置2の着脱方法は、ベース補助部材60及びカバー補助部材80を取り除く工程(補助部材取り除き工程)を含む。
FIG. 19 is a cross-sectional view showing the indwelling device 2 obtained by removing the base
補助部材取り除き工程では、まず、図18に示した第2組立状態から、ベース補助部材60を上方に持ち上げる。このとき、ベース部材10bは、カバー部材30bに爪部21において係合されているため、ベース補助部材60と係合するよりも強い力でカバー部材30bと係合している。同様に、カバー部材30bは、ベース部材10bに装着されているため、カバー補助部材80と係合するよりも強い力でベース部材10bと係合している。そして、ベース補助部材60は、第2組立状態では、例えば摩擦力により、ベース部材10bと係合するよりも強い力でカバー補助部材80と係合している。同様に、カバー補助部材80は、第2組立状態では、例えば摩擦力により、カバー部材30bと係合するよりも強い力でベース部材10bと係合している。これにより、ベース補助部材60を上方に持ち上げると、ベース部材10b及びカバー部材30bが生体表面Sに固定されたまま、ベース補助部材60と共にカバー補助部材80が上方に持ち上がる。このようにして、図19に示すように、ベース補助部材60及びカバー補助部材80を取り除くことができる。図18に示した第2組立工程、及び、図19に示した補助部材取り除き工程は、カバー部材装着工程S2を構成する。
In the auxiliary member removing step, first, the base
図19に示すように、カバー部材装着工程S2の後、すなわち、留置装置2が生体表面Sに留置されて針部材50bが生体表面Sに穿刺された状態で、留置装置2が使用可能となる(使用工程S3)。留置装置2は、センサ電極54を用いて、被計測物質に関する情報を測定する。図19に示すように、装着状態では、針部材50bのハブ52bの上面に露出する接続部55と、カバー部材30bの突出部32の下面に露出する接続部41と、が互いに接触するため、センサ電極54は、カバー部材30bが備える通信装置40と電気的に接続される。針部材50bが生体表面Sに穿刺された状態では、センサ電極54は、針本体51bの中空部に導入された被検者の体液に含まれる被計測物質の量又は濃度に応じた電気的信号を検出する。検出された電気的信号は、通信装置40に送信される。通信装置40は、受信した電気的信号に応じた通信信号を生成し、外部の表示デバイス等に送信することができる。
As shown in FIG. 19, the indwelling device 2 can be used after the cover member mounting step S2, that is, in a state where the indwelling device 2 is placed on the living body surface S and the
図20は、留置装置2の着脱方法のカバー部材取り外し工程S4を示す図である。留置装置2の使用の終了後、ベース部材10bの爪部21を、底板26の延在方向内側に押圧すると、爪部21と係合孔42との係合が解除され、カバー部材30bをベース部材10bから取り外すことができる。カバー部材30bをベース部材10bから取り外した後、図20に示すように、カバー部材30bを軸方向Aに沿ってベース部材10bから離隔するように上方に移動させる。このとき、カバー部材30bの爪部33と、針部材50bのハブ52bと、の間の係合は解除されず、針部材50bが軸方向Aに沿って基端側に移動する。これにより、針部材50bは生体表面Sから抜去される。
FIG. 20 is a diagram illustrating a cover member removing step S4 of the method for attaching and detaching the indwelling device 2. After the use of the indwelling device 2, when the
図20に示すように、針部材50bが軸方向Aに沿って基端側に移動すると、針部材50bに固定されたベース部材10bの支持部16、及び、支持部16を移動可能に支持する可動部17も、外筒部18に対して軸方向Aに沿って上方に移動する。外筒部18、可動部17、及び支持部16は、図11に示した未装着状態よりも全長が伸びると、支持部16と可動部17との間の摩擦力、及び、可動部17と外筒部18との間の摩擦力がそれぞれ上昇して、針部材10bが先端側に再度移動することを規制する。具体的には、例えば、支持部16の外周面の下端付近が拡径しており、また、可動部17の内周面の上端付近が縮径している。そして、支持部16の拡径した部分と可動部17の縮径した部分とが軸方向Aで同じ位置になると、支持部16と可動部17との間の摩擦力が上昇する。同様に、例えば、可動部17の外周面の下端付近が拡径しており、また、外筒部18の内周面の上端付近が縮径している。そして、可動部17の拡径した部分と外筒部18の縮径した部分とが軸方向Aで同じ位置になると、可動部17と外筒部18との間の摩擦力が上昇する。このように、ベース部材10bは、基端側に移動した針部材50bを固定する。これにより、針部材50bが誤って先端側に移動して、針部材50bの先端がベース部材10bの下面12から再び突出することを抑制することができる。
As shown in FIG. 20, when the
図20に示した状態から、カバー部材30bを、直交方向Bに沿う面内で、針部材50bの軸を中心に回転させることで、カバー部材30bの爪部33と、針部材50bのハブ52bの突起部53と、の間の係合が解除され、カバー部材30bをベース部材10bから取り外すことができる。あるいは、爪部33を外周方向から押圧することで針部材50bのハブ52bの突起部53と、の間の係合が解除され、カバー部材30bをベース部材10bから取り外せるように構成してもよい。
From the state shown in FIG. 20, the
留置装置2のベース部材取り外し工程S5は、上述した第1実施形態の留置装置1のベース部材取り外し工程S5と同様であるので、説明を省略する。
Since the base member removal step S5 of the indwelling device 2 is the same as the base member removal step S5 of the
上述のように、本実施形態の留置装置2では、上述の第1実施形態の留置装置1と同様の効果を得ることができる。加えて、上述した種々の効果を得ることができる。
As described above, the indwelling device 2 of the present embodiment can obtain the same effects as those of the
留置装置2は、ベース部材10bを使い捨て可能な構成とし、カバー部材30bを繰り返し利用可能な構成とすることができる。留置装置セット5(図16等参照)は、ベース部材10b、ベース補助部材60、及びカバー補助部材80を、使い捨て可能な交換具とし、カバー部材30bを繰り返し利用可能な構成とすることができる。
The indwelling device 2 can be configured such that the
本開示は、上述した各実施形態で特定された構成に限定されるものではなく、特許請求の範囲に記載した内容を逸脱しない範囲内で種々の変形が可能である。 The present disclosure is not limited to the configuration specified in each of the above-described embodiments, and various modifications can be made without departing from the contents described in the claims.
本開示は、生体表面に留置された状態で使用可能な留置装置及び留置装置セットに関する。 The present disclosure relates to an indwelling device and an indwelling device set that can be used while being placed on the surface of a living body.
1、2:留置装置
5:留置装置セット
10a、10b:ベース部材
11:上面
12:下面
13:中空部
14:内面
15:第1外壁
16:支持部
17:可動部
18:外筒部
19:内筒部
20:開口
21:爪部
22:凹部
26:底板
30a、30b:カバー部材
31:下面
32:突出部
33:爪部
34:第2外壁
35:装置カバー部
36:挿入空間
40:通信装置
41:接続部
42:係合孔
43:凹部
44:配線板
46:天板
50a、50b:針部材
51a、51b:針本体
52a、52b:ハブ
53:突起部
54:センサ電極
55:接続部
60:ベース補助部材
61:本体部
62:板バネ
63:凸部
64:切り欠き部
65:凸部
66:カバー筒部
67:突起部
70:ベース部材群
80:カバー補助部材
81:天板
82:第3外壁
83:凸部
84:突起部
85:凹部
90:カバー部材群
A:針部材の軸方向
B:直交方向
C:針部材の軸方向に沿う上側
D:針部材の軸方向に沿う下側
S:生体表面
1, 2: Indwelling device 5: Indwelling device set 10a, 10b: Base member 11: Upper surface 12: Lower surface 13: Hollow portion 14: Inner surface 15: First outer wall 16: Supporting portion 17: Movable portion 18: Outer cylindrical portion 19: Inner cylinder part 20: Opening 21: Claw part 22: Recessed part 26:
Claims (7)
生体表面に固定可能なベース部材と、
前記ベース部材に装着可能なカバー部材と、を備え、
前記ベース部材は、前記針部材を軸方向に移動可能に支持し、
前記カバー部材が前記ベース部材から取り外されると、前記針部材が前記カバー部材と係合して基端側に移動する、留置装置。 An indwelling device comprising a needle member, which can be used in a state where the needle member is placed on the surface of the living body and punctured on the surface of the living body;
A base member that can be fixed to a biological surface;
A cover member attachable to the base member,
The base member supports the needle member so as to be movable in the axial direction,
The indwelling apparatus, wherein when the cover member is removed from the base member, the needle member engages with the cover member and moves to the proximal end side.
前記カバー部材は通信装置を備え、
前記カバー部材が前記ベース部材に装着された状態で、前記センサ電極は前記通信装置と電気的に接続される、請求項1から4のいずれか一項に記載の留置装置。 The needle member includes a sensor electrode,
The cover member includes a communication device,
The indwelling device according to any one of claims 1 to 4, wherein the sensor electrode is electrically connected to the communication device in a state where the cover member is attached to the base member.
前記ベース部材を保持可能なベース補助部材と、
前記カバー部材を保持可能なカバー補助部材と、を備え、
前記ベース補助部材及び前記カバー補助部材は、前記カバー部材を、前記ベース部材に対して前記針部材の軸方向に沿って移動可能に支持する、留置装置セット。 An indwelling device according to any one of claims 1 to 5;
A base auxiliary member capable of holding the base member;
A cover auxiliary member capable of holding the cover member,
The base auxiliary member and the cover auxiliary member are indwelling device sets that support the cover member so as to be movable along the axial direction of the needle member with respect to the base member.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018014099A JP6991872B2 (en) | 2018-01-30 | 2018-01-30 | Detention device and detention device set |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018014099A JP6991872B2 (en) | 2018-01-30 | 2018-01-30 | Detention device and detention device set |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019129973A true JP2019129973A (en) | 2019-08-08 |
| JP6991872B2 JP6991872B2 (en) | 2022-01-13 |
Family
ID=67545122
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018014099A Active JP6991872B2 (en) | 2018-01-30 | 2018-01-30 | Detention device and detention device set |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6991872B2 (en) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008539810A (en) * | 2005-04-08 | 2008-11-20 | エフ.ホフマン−ラ ロシュ アーゲー | Device for positioning a probe in a living tissue |
| JP2012519536A (en) * | 2009-03-05 | 2012-08-30 | アースキン メディカル エルエルシー | Needle medical device and related methods |
| JP2017512118A (en) * | 2014-03-12 | 2017-05-18 | グルコベーション, インコーポレーテッドGlucovation, Inc. | Wearable electrochemical sensor and method |
| JP2017525502A (en) * | 2014-08-29 | 2017-09-07 | メデイカル コンポーネンツ,インコーポレーテツド | Huba safety needle |
-
2018
- 2018-01-30 JP JP2018014099A patent/JP6991872B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008539810A (en) * | 2005-04-08 | 2008-11-20 | エフ.ホフマン−ラ ロシュ アーゲー | Device for positioning a probe in a living tissue |
| JP2012519536A (en) * | 2009-03-05 | 2012-08-30 | アースキン メディカル エルエルシー | Needle medical device and related methods |
| JP2017512118A (en) * | 2014-03-12 | 2017-05-18 | グルコベーション, インコーポレーテッドGlucovation, Inc. | Wearable electrochemical sensor and method |
| JP2017525502A (en) * | 2014-08-29 | 2017-09-07 | メデイカル コンポーネンツ,インコーポレーテツド | Huba safety needle |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6991872B2 (en) | 2022-01-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11246519B2 (en) | Medical device inserters and processes of inserting and using medical devices | |
| JP6090795B2 (en) | Sensor insertion device | |
| EP2059174B1 (en) | Sterile cover and needle guide for an imaging device | |
| JP4644678B2 (en) | Puncture tool | |
| JP5202537B2 (en) | Puncture set | |
| JP6960043B2 (en) | Sensor insertion device | |
| WO2014162383A1 (en) | Sensor retention device and vital sign measurement system | |
| JP7143308B2 (en) | Insertion device and detection device | |
| JP2021037274A (en) | Method of assembling physiological signal monitoring device | |
| JP2010523227A (en) | Analyte sensing device having one or more sensing electrodes | |
| CN114391838A (en) | Implanter and method of use | |
| JP2019129973A (en) | Indwelling apparatus and indwelling apparatus set | |
| US20170290573A1 (en) | Puncture needle unit and puncture needle device, and safety tube for same | |
| JP3115405U (en) | Puncture needle and its cap | |
| CN216060518U (en) | Medical equipment and medical auxiliary device | |
| JP4480441B2 (en) | Sensor insertion aid | |
| JP2017164257A (en) | Catheter retainer | |
| US20220039900A1 (en) | Used device detection | |
| JP2008200438A (en) | Needle-integrated sensor | |
| WO2019176331A1 (en) | Sensor insertion device | |
| US20220047189A1 (en) | Insertion device | |
| US20240065727A1 (en) | Puncture needle and needle assembly | |
| JP4995741B2 (en) | Puncture device | |
| WO2024088697A1 (en) | Epidermal support patch | |
| JP2005000516A (en) | Blood-collecting apparatus and blood sugar level meter |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200902 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210719 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210803 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210927 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20211130 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20211208 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6991872 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |