JP2019120519A - Agitation state detection device, agitation control device, and agitation state detection method - Google Patents
Agitation state detection device, agitation control device, and agitation state detection method Download PDFInfo
- Publication number
- JP2019120519A JP2019120519A JP2017253446A JP2017253446A JP2019120519A JP 2019120519 A JP2019120519 A JP 2019120519A JP 2017253446 A JP2017253446 A JP 2017253446A JP 2017253446 A JP2017253446 A JP 2017253446A JP 2019120519 A JP2019120519 A JP 2019120519A
- Authority
- JP
- Japan
- Prior art keywords
- stirring
- agitation
- state detection
- unit
- waste
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000013019 agitation Methods 0.000 title claims abstract description 67
- 238000001514 detection method Methods 0.000 title claims abstract description 57
- 230000010287 polarization Effects 0.000 claims abstract description 97
- 239000002699 waste material Substances 0.000 claims abstract description 69
- 238000003756 stirring Methods 0.000 claims description 121
- 125000000391 vinyl group Chemical group [H]C([*])=C([H])[H] 0.000 claims description 34
- 229920002554 vinyl polymer Polymers 0.000 claims description 34
- 239000000428 dust Substances 0.000 claims description 31
- 239000000463 material Substances 0.000 claims description 4
- 238000000034 method Methods 0.000 description 39
- 238000012545 processing Methods 0.000 description 15
- 238000002485 combustion reaction Methods 0.000 description 10
- 238000003384 imaging method Methods 0.000 description 9
- 238000012790 confirmation Methods 0.000 description 5
- 238000010586 diagram Methods 0.000 description 5
- 230000003287 optical effect Effects 0.000 description 5
- 238000004590 computer program Methods 0.000 description 4
- 235000019557 luminance Nutrition 0.000 description 4
- 238000004891 communication Methods 0.000 description 3
- 239000006185 dispersion Substances 0.000 description 3
- 238000000605 extraction Methods 0.000 description 3
- 239000012634 fragment Substances 0.000 description 3
- 230000000007 visual effect Effects 0.000 description 3
- 238000011179 visual inspection Methods 0.000 description 3
- 238000012935 Averaging Methods 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 238000005286 illumination Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000010248 power generation Methods 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
Images








Landscapes
- Investigating Or Analysing Materials By Optical Means (AREA)
Abstract
Description
本発明は、ピット内に貯留されたごみの撹拌状態を検出する撹拌状態検出装置、撹拌制御装置、および撹拌状態検出方法に関する。 The present invention relates to a stirring state detection device, a stirring control device, and a stirring state detection method for detecting a stirring state of waste stored in a pit.
ごみ処理場において、収集されたごみは、ピットと呼ばれる貯留槽に投棄され、一時的に貯留される。貯留されたごみは、その後、焼却炉へ運ばれて焼却処分される。焼却時に、ごみの中に水分が多く含まれている部分があると、燃焼効率が低下する。このため、焼却処分前において、例えばクレーンによって、ピット内のごみの撹拌処理が行われる。この撹拌処理によって、炉が不安定となることを防止している。 At the waste disposal site, collected waste is dumped into a storage tank called a pit and temporarily stored. The stored waste is then transported to an incinerator and incinerated. At the time of incineration, if there is a part containing much moisture in the waste, the combustion efficiency will be reduced. For this reason, before incineration disposal, stirring processing of the refuse in a pit is performed by a crane, for example. The stirring process prevents the furnace from becoming unstable.
特許文献1には、撹拌状態を均一にするための方法が開示されている。特許文献1に記載の方法は、ごみ収集車またはクレーンによってピット内へ投棄され、堆積されるごみの各層に対して、攪拌回数を演算する。そして、演算した攪拌回数を、クレーン操作オペレータに対して出力する。
しかしながら、特許文献1に記載の方法で撹拌を行っても、確実に撹拌されたか否かがわからない。このため、例えば、作業員等が、目視などにより、撹拌状態を確認することが必要となる場合がある。
However, even if it stirs by the method of
本発明は、このような事情に鑑みなされたものであり、ごみの撹拌状態を、精度よく自動検出できる撹拌状態検出装置、撹拌制御装置、および撹拌状態検出方法を提供することを目的とする。 The present invention has been made in view of such circumstances, and it is an object of the present invention to provide an agitation state detection device, an agitation control device, and an agitation state detection method capable of automatically detecting the agitation state of dust with high accuracy.
上記課題を解決するため、本願の第1発明は、ピット内に貯留されたごみの撹拌状態を検出する撹拌状態検出装置であって、前記ピット内に貯留されたごみで反射する光を受光して、偏光情報を取得する偏光情報取得部と、前記偏光情報取得部が取得する偏光情報を含む偏光画像を生成する偏光画像生成部と、前記偏光画像生成部が生成する偏光画像に基づいて、ごみの撹拌状態を判定する判定部と、を備える。 In order to solve the above problems, a first invention of the present application is a stirring state detection device for detecting a stirring state of dust stored in a pit, which receives light reflected by dust stored in the pit. A polarization information acquisition unit for acquiring polarization information, a polarization image generation unit for generating a polarization image including polarization information acquired by the polarization information acquisition unit, and a polarization image generated by the polarization image generation unit. And a determination unit that determines the agitation state of the waste.
本願の第2発明は、第1発明の撹拌状態検出装置であって、前記判定部は、前記偏光画像から、貯留されたごみの中のビニルの分布を判定することにより、ごみの撹拌状態を判定する。 A second invention of the present application is the agitation state detection device according to the first aspect, wherein the determination unit determines the agitation state of the refuse by determining the distribution of vinyl in the stored refuse from the polarization image. judge.
本願の第3発明は、第1発明または第2発明の撹拌状態検出装置であって、ごみ袋に入れられた状態で、前記ピット内に投棄されるごみの撹拌状態を検出する。 A third invention of the present application is the agitation state detecting device according to the first invention or the second invention, wherein the agitation state of the waste dumped in the pit is detected in a state of being put in the waste bag.
本願の第4発明は、第1発明から第3発明までの撹拌状態検出装置であって、輝度、明度および彩度に基づいて、前記ピット内に貯留されたごみの通常画像を生成する通常画像生成部、を備え、前記判定部は、前記偏光画像と、前記通常画像とに基づいて、ごみの撹拌状態を判定する。 A fourth invention of the present application is the stirring state detection device according to the first invention to the third invention, wherein a normal image for generating a normal image of dust stored in the pit based on luminance, brightness and saturation. A generation unit is included, and the determination unit determines the agitation state of the dust based on the polarization image and the normal image.
本願の第5発明は、第1発明から第4発明のいずれかの撹拌状態検出装置であって、前記判定部による判定結果から、ごみの撹拌作業が必要なエリアを特定するエリア特定部と、前記エリア特定部により特定されるエリアを外部へ出力する出力部と、備える。 A fifth invention of the present application is the stirring state detection device according to any one of the first invention to the fourth invention, wherein an area specifying unit for specifying an area requiring the work of stirring waste from the determination result by the determination unit; And an output unit that outputs the area specified by the area specification unit to the outside.
本願の第6発明は、ピット内に投棄されたごみを撹拌する撹拌部を動作制御する撹拌制御装置であって、第5発明の撹拌状態検出装置と、前記撹拌部を駆動制御して、前記出力部により出力されるエリアを撹拌させる制御部と、を備える。 A sixth invention of the present application is a stirring control device for performing operation control of a stirring unit for stirring waste dumped in a pit, wherein the stirring state detection device of the fifth invention and driving control of the stirring portion are performed. And a control unit for stirring the area output by the output unit.
本願の第7発明は、第6発明の撹拌制御装置であって、前記制御部は、前記判定部が用いた偏光画像と、前記偏光画像に基づくエリアに対して行った、前記撹拌部の動作制御内容とを、対応付けて記憶する共に、記憶内容を更新する。 A seventh invention of the present application is the agitation control device of the sixth invention, wherein the control unit performs the operation of the agitation unit performed on the polarization image used by the determination unit and an area based on the polarization image The control content is stored in association with the control content, and the stored content is updated.
本願の第8発明は、ピット内に投棄されたごみの撹拌状態を検出する撹拌状態検出方法であって、a)前記ピット内に貯留されたごみで反射する光を受光して、特定の偏光成分を含む偏光情報を取得する工程と、b)前記工程a)で取得する偏光情報を含む偏光画像を生成する工程と、c)前記工程b)で生成する偏光画像に基づいて、ごみの撹拌状態を判定する工程と、を備える。 An eighth invention of the present application is a stirring state detection method for detecting a stirring state of waste dumped in a pit, which comprises: a) receiving light reflected by the waste stored in the pit to obtain specific polarized light B) stirring the dust based on the polarization image generated in step b); b) acquiring polarization information including components; b) generating a polarization image including polarization information acquired in step a); Determining the state.
本発明によれば、輝度、明度および彩度に基づいて生成される通常画像では現れないごみも、偏光画像には現れるため、人の目視に頼ることなく、精度よく、ごみの撹拌状態を判定できる。 According to the present invention, dust that does not appear in a normal image generated on the basis of luminance, lightness and saturation also appears in a polarized image, so that the agitation state of dust is accurately determined without relying on visual observation by people. it can.
以下に説明する実施形態では、本発明の撹拌状態検出装置、および撹拌制御装置を、ごみ処理場のごみ貯留施設に用いた場合について説明する。ごみ貯留施設は、一時的にごみを貯留するための施設である。 In the embodiments described below, the case where the stirring state detection device and the stirring control device of the present invention are used for a waste storage facility of a waste disposal site will be described. The waste storage facility is a facility for temporarily storing waste.
<1.ごみ貯留施設について>
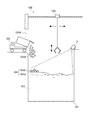
図1は、ごみ貯留施設100の模式的な図である。
<1. About waste storage facility>
FIG. 1 is a schematic view of the
ごみ貯留施設100は、焼却処分前のごみ103を一時的に貯留する施設である。ごみ貯留施設100には、ピット101が設置されている。ピット101は、ごみ103を貯留する貯留槽である。ピット101の上方には、水平方向および鉛直方向に移動可能なクレーン105が設置されている。ピット101に貯留されたごみ103は、クレーン105によって、不図示の焼却施設へ搬送される。
The
ピット101内へは、ごみが入ったごみ袋104Aが、ごみ収集車102によって、搬入口100Aから投棄される。投棄された多数のごみ袋104Aは、貯留されたごみ103の表面に堆積する。このとき、ごみ袋104Aは、主に、ピット101の搬入口100A側に堆積する。ピット101内へ投棄されたごみ袋104Aは、クレーン105によって、ピット101の中央付近に運ばれ、破かれる。これにより、ごみ袋104A内のごみ103、および、ごみ袋104Aの破片104Bは、ピット101内に散乱する。なお、以下では、ごみ袋104A、および、その破片104Bを、総じて「ビニル104」と称する場合がある。
Into the
ピット101内では、クレーン105による、ごみの撹拌動作が行われる。撹拌動作は、ビニル104を含む、ピット101内のごみ103を掴んで持ち上げ、再びピット101内へ投下する動作である。この撹拌動作により、ごみ袋104Aは破られる。また、ピット101内のごみ103が撹拌され、ピット101内のごみ103のごみ質が均一化される。ごみ質とは、ごみの水分量、密度などである。焼却施設への搬送前に撹拌動作を行うことで、焼却施設において、ごみの水分量が局所的に多いことに起因して、ごみ103が燃焼されにくくなるおそれが回避される。
In the
クレーン105は、後述の撹拌・搬送制御装置により、駆動制御される。撹拌・搬送制御装置は、画像認識により、ピット101に貯留されたごみ103の撹拌状態を検出する撹拌状態検出装置を備えている。クレーン105による撹拌動作は、撹拌状態検出装置の検出結果に応じて実行される。例えば、撹拌状態検出装置が、撹拌が十分であると判定されるまで、撹拌動作が繰り返される。これにより、ごみ103のごみ質が均一化され、その結果、焼却施設で、効率よくごみ103を焼却できる。
The
<2.撹拌・搬送制御装置について>
図2は、撹拌・搬送制御装置200が有する構成要素、および構成要素間の接続を示すブロック図である。撹拌・搬送制御装置200は、本発明の「撹拌制御装置」の一例である。また、クレーン105は、本発明の「撹拌部」の一例である。
<2. Stirring and transport control device>
FIG. 2 is a block diagram showing the components of the stirring and
撹拌・搬送制御装置200は、撹拌状態検出装置1と、クレーン制御部201とを備えている。
The agitation /
クレーン制御部201は、クレーン105を駆動制御する制御部である。クレーン制御部201は、撹拌状態検出装置1とデータ通信可能に接続されている。また、クレーン制御部201は、不図示の操作部から、作業者による操作を受け付ける。そして、クレーン制御部201は、撹拌状態検出装置1から入力されるデータ、または、操作部から受け付ける作業者の操作に従い、クレーン105を駆動制御し、ごみの撹拌動作、および、焼却施設へのごみの搬送動作を実行する。
The
撹拌状態検出装置1は、ごみ袋104Aに入れられた状態で、ピット101内に投棄されたごみ103の撹拌状態を検出する装置である。撹拌状態検出装置1は、偏光画像生成部2と、データ入力部3と、演算装置4とを備えている。
The stirring
データ入力部3は、自動または手動により、データを演算装置4へ入力する入力手段である。データ入力部3からは、作業者による操作、または、他の処理施設、例えば、焼却施設での燃焼状態の情報などが、入力される。
The
偏光画像生成部2は、受光した光から、偏光情報を取得する。そして、偏光画像生成部2は、取得した偏光情報を含む偏光画像を生成する。偏光画像生成部2は、例えば、偏光カメラである。図3は、偏光画像生成部2が、偏光子アレイ22を備えた偏光カメラである場合を説明するための図である。
The polarization
偏光画像生成部2は、撮像素子21と、撮像素子21の前面に配置された偏光子アレイ22とを有する。撮像素子21と偏光子アレイ22とは、それぞれの最小画素が対になっている。つまり、図3のように、撮像素子21の画素211の前方には、偏光子アレイ22の偏光子221が配置される。同様に、撮像素子21の画素212の前方には、偏光子アレイ22の偏光子222が配置される。撮像素子21の画素213の前方には、偏光子アレイ22の偏光子223が配置される。撮像素子21の画素214の前方には、偏光子アレイ22の偏光子224が配置される。そして、各撮像素子21の画素211〜214それぞれには、前方の偏光子221〜224を通過した光が入射する。
The polarization
偏光子221〜224それぞれは、互いに偏光方向が45°ずれている。このため、画素211〜214には、それぞれの偏光方向が45°ずれた光が入射する。そして、各画素211〜214において、偏光方向それぞれの光の強度を測定することができる。つまり、偏光画像生成部2は、隣接する4画素(画素211〜214)の輝度を比較し、演算する処理を、撮像素子21全体で行うことで、受光した反射光に含まれる、偏光情報を取得することができる。つまり、偏光画像生成部2は、本発明の「偏光情報取得部」の一例である。そして、偏光画像生成部2は、取得した偏光情報を含む、偏光画像を生成する。
The polarization directions of the
なお、図3で偏光カメラの一例を説明したように、偏光カメラの構成は、偏光子アレイを配置したものであってもよいし、波長板アレイおよび検光子を配置したものであってもよい。 As described in the example of the polarization camera in FIG. 3, the configuration of the polarization camera may be one in which a polarizer array is disposed, or one in which a wavelength plate array and an analyzer are disposed. .
偏光画像生成部2は、図1に示すように、ピット101に貯留されたごみ103が、撮像可能な位置に設置されている。偏光画像生成部2の数は、特に限定されない。一つの偏光画像生成部2で、貯留されたごみ103を撮像してもよい。または、ピット101内を複数の領域に分けて、複数の偏光画像生成部2で、複数の領域それぞれを撮像してもよい。
As shown in FIG. 1, in the polarized light
ピット101内に設置された既存の照明から発せられた光、または、窓から入射した太陽光などは、貯留されたごみ103で反射する。偏光画像生成部2は、その反射した光(以下、反射光と称す)を受光して、ピット内のごみの偏光情報を取得する。そして、偏光画像生成部2は、取得した偏光情報を含む、貯留されたごみ103の偏光画像を生成する。生成された偏光画像は、後の演算装置4において、ビニル104の大きさ、または、分散度合に基づいた、ごみの撹拌状態の判定処理に用いられる。
The light emitted from the existing illumination installed in the
前記のように、ごみ袋104Aは、ピット101内で、クレーン105によって破かれる。また、一般的なごみ袋104Aは透明または半透明である。このため、輝度、明度および彩度に基づいて生成される画像(以下、通常画像と称す)では、ビニル104が現れないことがある。これに対し、偏光画像には、ビニル104を、現すことができる。これは、光が反射する際、光に含まれるs偏光およびp偏光の反射率が、反射する物体の材質、および、入射角によって異なるためである。なお、ごみ袋104Aと同色で材質の異なるごみがある場合、そのごみは、通常画像では区別がつかないことがあるが、偏光画像では、区別することができる。
As described above, the
図4は、ピット101内の通常画像を示す図である。図5は、ピット101内の偏光画像を示す図である。図4の通常画像、および、図5の偏光画像は、それぞれ、ピット101内の同じ位置を現した画像である。図4の通常画像では、撹拌動作により、ごみ袋104Aが破られている領域と、破られていない領域との識別が難しい。これに対し、図5の偏光画像では、ごみ袋104Aが破られていない領域(例えば、図5中の円領域内)と、破られている領域(例えば、図5中の円領域外)とが、明瞭に異なる偏光情報として現れる。したがって、これらの領域を明確に識別することができる。
FIG. 4 is a view showing a normal image in the
図6は、s偏光とp偏光との入射角に対する反射率の関係を示す図である。 FIG. 6 is a diagram showing the relationship of the reflectance to the incident angle of s-polarized light and p-polarized light.
s偏光の反射率は、入射角が0°から90°に増加するに従って増加する。これに対し、p偏光の反射率は、入射角が増加するに従って徐々に、0近くまで減少し、その後、急激に増加する。図6に示す関係は、光を反射させる物体の材質によって異なる。このため、光の反射位置のごみ103の内容によって、s偏光およびp偏光の反射率は異なる。つまり、光の反射位置にビニル104が含まれていれば、ビニル104で反射した反射光と、ビニル104の周囲で反射した反射光との偏光情報が異なるため、生成される偏光画像には、ビニル104が現れる。
The reflectance of s-polarization increases as the incident angle increases from 0 ° to 90 °. On the other hand, the reflectance of p-polarization gradually decreases to near 0 as the incident angle increases, and then rapidly increases. The relationship shown in FIG. 6 differs depending on the material of the object that reflects light. Therefore, the reflectances of s-polarized light and p-polarized light differ depending on the content of the
図2に戻る。演算装置4は、CPU41、ROM42、RAM43、記憶部44および入出力部45を有する。入出力部45は、偏光画像生成部2、データ入力部3およびクレーン制御部201と、データ通信可能に接続されている。また、入出力部45には、不図示のモニタまたはスピーカなどが接続されてもよい。
Return to FIG. The
記憶部44は、例えば、ハードディスクドライブである。記憶部44には、後述の、通常画像生成処理または撹拌状態検出処理を実行するための、コンピュータプログラムおよびデータが、記憶されている。CPU41は、記憶部44に記憶されたコンピュータプログラムおよびデータを、読み出して実行する。そして、CPU41は、入出力部45に接続される各部とデータ通信しつつ、各種処理を実行する。CPU41は、コンピュータプログラムを実行することで、本発明の「通常画像生成部」、「判定部」、「判定基準変更部」、「エリア特定部」および「出力部」として機能する。
The
通常画像生成処理では、CPU41は、偏光画像生成部2で生成された偏光画像から、通常画像を生成する。例えば、CPU41は、図3で説明した、各画素で測定した、偏光方向それぞれの光を平均化することで、通常画像を生成する。
In the normal image generation process, the
撹拌状態検出処理では、CPU41は、生成した通常画像と、偏光画像生成部2から取得した偏光画像とを用いて、ピット101内のごみ103の撹拌状態を判定する。以下に、撹拌状態検出処理について詳述する。
In the agitation state detection process, the
<3.1.撹拌状態検出処理について>
図7は、撹拌状態検出処理を示すフローチャートである。図7に示す処理は、CPU51が、記憶部54に記憶されたコンピュータプログラムを実行することで、開始される。
<3.1. About stirring state detection processing>
FIG. 7 is a flowchart showing the stirring state detection process. The process shown in FIG. 7 is started by the CPU 51 executing a computer program stored in the storage unit 54.
CPU41は、偏光画像生成部2を駆動制御して、偏光画像生成部2で生成された偏光画像を取得する(ステップS1)。CPU41は、一定時間毎に偏光画像生成部2を駆動し、偏光画像を生成してもよい。また、CPU41は、予め決められたスケジュールに従い、偏光画像生成部2を駆動し、偏光画像を生成してもよい。
The
CPU41は、偏光画像生成部2を駆動制御して、各画素の検出値から、通常画像を生成する(ステップS2)。
The
次に、CPU41は、偏光画像を用いて、ビニル104の分布状態から、撹拌状態を判定する(ステップS3)。この判定処理では、CPU41は、偏光画像に対し、画像認識処理を行い、ビニル104を検出する。前記のように、通常画像では、ビニル104、または、ごみ袋104Aが現れないことがある。このような場合であっても、偏光画像を用いることで、ビニル104を検出することができる。そして、CPU41は、検出したビニル104のエッジ抽出を行う。CPU41は、抽出したビニル104のエッジから、ビニル104の大きさを判定し、基準値以上の大きさである場合、撹拌が不十分であると判定する。なお、画像認識処理において、エッジ抽出により、ビニル104の分布状態を判定しているが、分布状態の判定手法は、エッジ抽出以外の方法を用いてもよい。
Next, the
また、CPU41は、画像認識処理により検出した、ビニル104の分散度合を検出する。一定の領域内にビニル104が集中する場合には、CPU41は、その領域における撹拌が不十分であると判定する。例えば、CPU41は、所定の領域内で抽出された、各エッジの距離を算出し、基準値と比較する。そして、基準値を超える距離の数が少ないと、CPU41は、一定の領域内にビニル104が集中していると判定し、その領域における撹拌が不十分であると判定する。なお、CPU41は、一定領域の面積と、一定領域内にビニル104が存在する領域の面積との割合(パーセンテージ)によって、ビニル104の集中度合を判定してもよい。
The
次に、CPU41は、偏光画像と同様に、通常画像に対し、画像認識処理を行い、撹拌状態を判定する(ステップS4)。ビニル104が不透明である場合、または、ビニル104が大きい場合、通常画像に、ビニル104が現れる場合がある。このような場合、画像認識処理により、ビニル104を検出できるため、ビニル104の状態から、撹拌状態を判定することができる。ステップS3では、偏光画像を用いて、撹拌状態を判定している。このように、偏光画像と通常画像とを併用することで、ビニル104が通常画像では現れない場合であっても、偏光画像には現れるため、ビニル104を検出でき、判定の精度をより高めることができる。
Next, the
CPU41は、ステップS3およびステップS4の結果から、ピット101内のごみ103の撹拌が不十分か否かを判定する(ステップS5)。ステップS3およびステップS4において、少なくとも一方の処理で、撹拌が不十分と判定されていれば、CPU41は、ステップS5において、撹拌が不十分と判定する。
The
撹拌が不十分と判定された場合(ステップS5:YES)、CPU41は、撹拌が必要なエリアを特定する(ステップS8)。CPU41は、特定したエリアを、画像データと共にクレーン制御部201に出力する(ステップS9)。画像データは、エリアの特定に用いられた、通常画像または偏光画像である。撹拌状態検出装置1から特定したエリアが入力されたクレーン制御部201は、後述する図8の撹拌学習処理を実行する。
If it is determined that the stirring is insufficient (step S5: YES), the
ステップS5において、撹拌が十分であると判定された場合(ステップS5:NO)、CPU41は、判定結果確認処理を実行する(ステップS6)。この結果確認処理では、例えば、作業者が、ピット101内を目視して、ごみ103の撹拌が十分であるか否かを確認する。そして、作業者は、ステップS5で判定された、撹拌が十分であるとする結果が正しいか否かを、データ入力部3から入力する。
When it is determined in step S5 that the stirring is sufficient (step S5: NO), the
CPU41は、入力された確認結果に基づいて、判定基準を更新する(ステップS7)。例えば、作業者の目視の結果、撹拌が不十分である場合、CPU41は、ステップS3またはステップS4で用いられる基準値を変更し、判定基準を厳しくする。そして、直前に行った判定よりも、撹拌が不十分であると判定され易くする。このように、基準値を学習的に更新することで、撹拌状態をより精度よく判定できる。なお、ステップS6およびステップS7の処理は、撹拌状態の判定が複数回繰り返され、ある程度学習が行われた後、省略されてもよい。
The
ステップS7またはS9の後、CPU41は、処理を終了するか否かを判定する(ステップS10)。終了する場合とは、例えば、撹拌・搬送制御装置200による撹拌・搬送処理を終了する場合である。処理を終了しない場合(ステップS10:NO)、CPU41は、ステップS1の処理に戻る。処理を終了する場合(ステップS10:YES)、CPU41は、図7の処理を終了する。
After step S7 or S9, the
このように、ビニル104の大きさ、または、分散度合から、ごみ103の撹拌状態を判定する場合において、偏光画像を用いることで、作業者の目視に頼ることなく、精度よく、ごみ103の撹拌状態を定量的に判定できる。また、本実施形態では、偏光画像と、通常画像とを併用して、撹拌状態を判定している。これにより、ビニル104が透明のため、通常画像では現れない場合であっても、偏光画像には現れるため、判定の精度をより高めることができる。さらに、判定結果を学習させることで、撹拌判定処理を繰り返し行うに従って、より高精度に、撹拌状態の判定が行える。
As described above, in the case of determining the agitation state of the
<3.2.撹拌学習処理について>
次に、撹拌状態検出装置1で特定された、撹拌が不十分なエリアが入力された撹拌状態検出装置1で実行される、撹拌学習処理について説明する。
<3.2. About agitation learning processing>
Next, a stirring learning process performed by the stirring
図8は、撹拌学習処理を示すフローチャートである。 FIG. 8 is a flowchart showing agitation learning processing.
クレーン制御部201は、撹拌状態検出装置1から特定エリアが入力されたか否かを判定する(ステップS21)。特定エリアは、図7のステップS8で説明したように、撹拌状態検出装置1で特定された、撹拌が不十分なエリアである。特定エリアが入力されていない場合(ステップS21:NO)、クレーン制御部201は、本処理を終了する。
The
特定エリアが入力された場合(ステップS21:YES)、クレーン制御部201は、クレーン105を駆動制御し、特定されたエリアに対して撹拌動作を行う(ステップS22)。クレーン制御部201は、撹拌動作を行う際、撹拌回数を演算する。ここで、撹拌動作の回数は、クレーン105がごみ103を掴んで持ち上げ、再びピット101内へ投下する動作を、1回とする。
When the specific area is input (step S21: YES), the
詳しくは、クレーン制御部201には、ステップS21で、特定エリアと共に、上述した画像データが入力される。クレーン制御部201は、これまでの撹拌動作において、入力された画像データに対して、行った撹拌動作の回数(動作制御内容)を記憶している。そして、クレーン制御部201は、マッチング処理を行い、記憶された画像データから、新たに入力された画像データに近い画像データを選択して、その画像データに対応する撹拌動作の回数を取得する。クレーン制御部201は、取得した回数、撹拌動作を行う。
Specifically, in step S21, the
クレーン制御部201は、ステップS22で行った撹拌動作から、撹拌動作を学習する(ステップS23)。例えば、ステップS22で撹拌動作が行われた結果、作業者が目視により、撹拌が不十分であると確認すると、さらに撹拌動作を行う。そして、クレーン制御部201は、行った撹拌動作の回数と、ステップS21で入力された画像データとを、対応付けて記憶する。これにより、クレーン制御部201は、入力された画像データに対して、行うべき撹拌動作の回数を、学習的に更新できる。その結果、クレーン制御部201は、効率よく撹拌動作を行える回数を、演算することができる。
The
<3.3.判定基準更新処理について>
次に、焼却施設から燃焼状態の情報がフィードバックされたときに、撹拌状態検出装置1で実行される判定基準更新処理について説明する。
<3.3. About judgment criteria update processing>
Next, when the information on the combustion state is fed back from the incineration facility, the determination criterion update process executed by the stirring
図9は、判定基準更新処理のフローチャートである。 FIG. 9 is a flowchart of determination criterion update processing.
CPU41は、燃焼状態の情報が入力されたか否かを判定する(ステップS31)。燃焼状態の情報は、焼却施設から自動で撹拌状態検出装置1に入力されてもよいし、作業者によって手動で入力されてもよい。燃焼状態の情報が入力されていない場合(ステップS31:NO)、CPU41は、本処理を終了する。
The
燃焼状態の情報が入力された場合(ステップS31:YES)、CPU41は、撹拌状態の判定基準を学習的に更新する(ステップS32)。例えば、ごみ103の撹拌が不十分であると、焼却施設において、ごみの水分量が多いことに起因して、ごみ103が燃焼されにくくなる。このため、撹拌が十分であると判定された場合において、焼却施設での燃焼が不十分であれば、CPU41は、撹拌が不十分であって、撹拌状態の判定処理は誤りであると判定する。そこで、CPU41は、図7のステップS7と同様に、判定基準を厳しくして、撹拌が不十分であると判定され易くする。このように、基準値を学習的に更新することで、撹拌状態をより精度よく判定できる。
When the information on the combustion state is input (step S31: YES), the
なお、撹拌状態検出装置1へフィードバックされる情報は、燃焼施設での燃焼状態に起因する発電量のデータであってもよい。
The information fed back to the stirring
<4.変形例>
以上、本発明の実施形態について説明したが、本発明は、上記の実施形態に限定されるものではない。
<4. Modified example>
As mentioned above, although embodiment of this invention was described, this invention is not limited to said embodiment.
上記の実施形態では、偏光画像から通常画像を生成しているが、通常画像用に通常の光学カメラを、ごみ貯留施設100内に設置してもよい。また、ごみ貯留施設100内に、ピット101内に光を照射する光源を設置してもよい。この場合、光源に偏光子を設けて、偏光した光を、ピット101に照射するようにしてもよい。
Although the normal image is generated from the polarization image in the above embodiment, a normal optical camera may be installed in the
また、偏光画像生成部2に代えて、通常の光学カメラと、偏光子とを用いてもよい。この場合、光学カメラの前方に偏光子を配置し、その偏光子を回転することで、光学カメラは、各方向に偏光した光を受光する。そして、光学カメラは、受光した光から、偏光画像を生成する。
Moreover, it may replace with the polarization | polarized-light
さらに、図7のステップS9において、CPU41は、特定したエリアを、例えば、モニタに出力して、作業者に報知してもよい。このとき、作業者は、特定されたエリアの撹拌状態を目視して、目視結果を入力して、判定処理を学習させるようにしてもよい。
Furthermore, in step S9 of FIG. 7, the
また、図7の撹拌状態検出処理では、撹拌が十分であると判定された場合に、作業者の目視による確認処理を行っているが、撹拌が不十分であると判定された場合にも、作業者の目視による確認処理を行うようにしてもよい。 Moreover, in the stirring state detection process of FIG. 7, when it is determined that the stirring is sufficient, the confirmation process by the visual inspection of the worker is performed, but even when it is determined that the stirring is insufficient, A confirmation process may be performed visually by the operator.
その他、撹拌状態検出装置、および撹拌制御装置の細部の構成については、本願の各図と相違していてもよい。また、上記の実施形態および変形例に登場した各要素を、矛盾が生じない範囲で、適宜に組み合わせてもよい。 In addition, about the structure of the detail of a stirring state detection apparatus and a stirring control apparatus, you may differ from each figure of this application. In addition, the elements appearing in the above-described embodiment and modification may be combined as appropriate as long as no contradiction occurs.
1 :撹拌状態検出装置
2 :偏光画像生成部
3 :データ入力部
4 :演算装置
21 :撮像素子
22 :偏光子アレイ
41 :CPU
42 :ROM
43 :RAM
44 :記憶部
45 :入出力部
51 :CPU
54 :記憶部
100 :貯留施設
100A :搬入口
101 :ピット
102 :収集車
104 :ビニル
104A :袋
104B :破片
105 :クレーン
200 :搬送制御装置
201 :クレーン制御部
211、212、213、214:画素
221、222、223、224:偏光子
1: Agitation state detection device 2: Polarized image generation unit 3: Data input unit 4: Arithmetic device 21: Image sensor 22: Polarizer array 41: CPU
42: ROM
43: RAM
44: storage unit 45: input / output unit 51: CPU
54: storage unit 100:
Claims (8)
前記ピット内に貯留されたごみで反射する光を受光して、偏光情報を取得する偏光情報取得部と、
前記偏光情報取得部が取得する偏光情報を含む偏光画像を生成する偏光画像生成部と、
前記偏光画像生成部が生成する偏光画像に基づいて、ごみの撹拌状態を判定する判定部と、
を備える、撹拌状態検出装置。 It is a stirring state detection device which detects the stirring state of the refuse stored in the pit,
A polarization information acquisition unit that receives light reflected by dust stored in the pit and acquires polarization information;
A polarization image generation unit that generates a polarization image including polarization information acquired by the polarization information acquisition unit;
A determination unit that determines an agitation state of the dust based on the polarization image generated by the polarization image generation unit;
An agitation state detection device comprising:
前記判定部は、前記偏光画像から、貯留されたごみの中のビニルの分布を判定することにより、ごみの撹拌状態を判定する、
撹拌状態検出装置 The stirring state detection device according to claim 1, wherein
The determination unit determines the agitation state of the waste by determining the distribution of vinyl in the stored waste from the polarized image.
Agitation state detection device
ごみとごみ袋の材質の違いから、前記ピット内に投棄されるごみの撹拌状態を検出する、
撹拌状態検出装置。 The stirring state detection device according to claim 1 or 2, wherein
From the difference in the material of the waste and the waste bag, detect the agitation state of the waste dumped in the pit,
Agitation state detection device.
輝度、明度および彩度に基づいて、前記ピット内に貯留されたごみの通常画像を生成する通常画像生成部、
を備え、
前記判定部は、
前記偏光画像と、前記通常画像とに基づいて、ごみの撹拌状態を判定する、
撹拌状態検出装置。 The stirring state detection device according to any one of claims 1 to 3, wherein
A normal image generation unit that generates a normal image of dust stored in the pit based on brightness, lightness, and saturation;
Equipped with
The determination unit is
Determining the agitation state of the dust based on the polarized image and the normal image;
Agitation state detection device.
前記判定部による判定結果から、ごみの撹拌作業が必要なエリアを特定するエリア特定部と、
前記エリア特定部により特定されるエリアを外部へ出力する出力部と、
を備える、撹拌状態検出装置。 The stirring state detection device according to any one of claims 1 to 4, wherein
An area identification unit that identifies an area that requires waste agitation from the determination result by the determination unit;
An output unit that outputs the area specified by the area specification unit to the outside;
An agitation state detection device comprising:
請求項5に記載の撹拌状態検出装置と、
前記撹拌部を駆動制御して、前記出力部により出力されるエリアを撹拌させる制御部と、
を備える、撹拌制御装置。 A stirring control device that controls the operation of a stirring unit that stirs the waste dumped in the pit,
The stirring state detection device according to claim 5;
A control unit configured to drive and control the stirring unit to stir the area output by the output unit;
An agitation control device comprising:
前記制御部は、
前記判定部が用いた偏光画像と、前記偏光画像に基づくエリアに対して行った、前記撹拌部の動作制御内容とを、対応付けて記憶する共に、記憶内容を更新する、
撹拌制御装置。 The agitation control device according to claim 6, wherein
The control unit
The polarization image used by the determination unit and the operation control content of the stirring unit performed on the area based on the polarization image are stored in association with each other, and the storage content is updated.
Stirring control device.
a)前記ピット内に貯留されたごみで反射する光を受光して、偏光情報を取得する工程と、
b)前記工程a)で取得する偏光情報を含む偏光画像を生成する工程と、
c)前記工程b)で生成する偏光画像に基づいて、ごみの撹拌状態を判定する工程と、
を備える、撹拌状態検出方法。 An agitation state detection method for detecting the agitation state of waste dumped in a pit, comprising:
a) Receiving the light reflected by the dust stored in the pit and acquiring polarization information;
b) generating a polarization image including polarization information acquired in the step a);
c) determining the agitation state of the dust based on the polarization image generated in the step b);
A stirring state detection method comprising:
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017253446A JP6879899B2 (en) | 2017-12-28 | 2017-12-28 | Stirring state detection device, stirring control device, and stirring state detection method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017253446A JP6879899B2 (en) | 2017-12-28 | 2017-12-28 | Stirring state detection device, stirring control device, and stirring state detection method |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019120519A true JP2019120519A (en) | 2019-07-22 |
| JP6879899B2 JP6879899B2 (en) | 2021-06-02 |
Family
ID=67306102
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017253446A Active JP6879899B2 (en) | 2017-12-28 | 2017-12-28 | Stirring state detection device, stirring control device, and stirring state detection method |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6879899B2 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116694129A (en) * | 2023-08-07 | 2023-09-05 | 济宁九德半导体科技有限公司 | Automatic control system and method for preparing ultraviolet curing type ink |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07311312A (en) * | 1994-03-25 | 1995-11-28 | Omron Corp | Optical sensor device |
| JP2003194710A (en) * | 2001-12-21 | 2003-07-09 | Shiseido Co Ltd | Method and apparatus for measuring refractive index of light scattering body |
| JP2011027349A (en) * | 2009-07-27 | 2011-02-10 | Takuma Co Ltd | Treatment system and treatment method for combustion target supplied to combustion furnace and combustion control system for the combustion furnace using the treatment system and the treatment method |
| JP2012033149A (en) * | 2010-07-01 | 2012-02-16 | Ricoh Co Ltd | Object identification device |
| US20150164327A1 (en) * | 2012-07-13 | 2015-06-18 | University Of Massachusetts | Multimodal imaging for the detection of tissue structure and composition |
| JP2015143139A (en) * | 2014-01-31 | 2015-08-06 | 日立造船株式会社 | Apparatus for detecting agitated state in refuse pit and method of detecting agitated state in refuse pit |
| JP2015187031A (en) * | 2014-03-27 | 2015-10-29 | 日立造船株式会社 | Measuring device of agitation state in refuse pit and measuring method of agitation state in refuse pit |
| JP2017111046A (en) * | 2015-12-17 | 2017-06-22 | 三菱化学株式会社 | Method for classifying organizational structure using color change distance and method for estimating physical property of material using classification |
-
2017
- 2017-12-28 JP JP2017253446A patent/JP6879899B2/en active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07311312A (en) * | 1994-03-25 | 1995-11-28 | Omron Corp | Optical sensor device |
| JP2003194710A (en) * | 2001-12-21 | 2003-07-09 | Shiseido Co Ltd | Method and apparatus for measuring refractive index of light scattering body |
| JP2011027349A (en) * | 2009-07-27 | 2011-02-10 | Takuma Co Ltd | Treatment system and treatment method for combustion target supplied to combustion furnace and combustion control system for the combustion furnace using the treatment system and the treatment method |
| JP2012033149A (en) * | 2010-07-01 | 2012-02-16 | Ricoh Co Ltd | Object identification device |
| US20150164327A1 (en) * | 2012-07-13 | 2015-06-18 | University Of Massachusetts | Multimodal imaging for the detection of tissue structure and composition |
| JP2015143139A (en) * | 2014-01-31 | 2015-08-06 | 日立造船株式会社 | Apparatus for detecting agitated state in refuse pit and method of detecting agitated state in refuse pit |
| JP2015187031A (en) * | 2014-03-27 | 2015-10-29 | 日立造船株式会社 | Measuring device of agitation state in refuse pit and measuring method of agitation state in refuse pit |
| JP2017111046A (en) * | 2015-12-17 | 2017-06-22 | 三菱化学株式会社 | Method for classifying organizational structure using color change distance and method for estimating physical property of material using classification |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116694129A (en) * | 2023-08-07 | 2023-09-05 | 济宁九德半导体科技有限公司 | Automatic control system and method for preparing ultraviolet curing type ink |
| CN116694129B (en) * | 2023-08-07 | 2023-10-17 | 济宁九德半导体科技有限公司 | Automatic control system and method for preparing ultraviolet curing type ink |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6879899B2 (en) | 2021-06-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4704804B2 (en) | Wood section exploration method, apparatus and program | |
| JP2020062633A (en) | Waste sorting apparatus and waste sorting method | |
| JP6296499B2 (en) | Appearance inspection apparatus and appearance inspection method for transparent substrate | |
| KR20190101857A (en) | Visual inspection device and illumination condition setting method of visual inspection device | |
| JP2006282319A (en) | Longitudinal rip detecting method and device for conveyor belt | |
| KR102100496B1 (en) | System and method for finding crack in concrete using drone and laser scanner | |
| JP2015143139A (en) | Apparatus for detecting agitated state in refuse pit and method of detecting agitated state in refuse pit | |
| JP7517662B2 (en) | Waste sorting equipment | |
| JP2011192032A (en) | Flaw learning device, flaw learning method and computer program | |
| JP6879899B2 (en) | Stirring state detection device, stirring control device, and stirring state detection method | |
| JP2014032109A (en) | Apparatus and method for detecting defect of wood | |
| JPH08114432A (en) | Device for inspecting transparent sheet containing net body | |
| JPH09178141A (en) | Crane controller for refuse pit | |
| TWI823261B (en) | Supported devices and support methods | |
| JP6861092B2 (en) | Visual inspection method and visual inspection equipment for electronic components | |
| KR20140082335A (en) | Method and apparatus of inspecting mura of flat display | |
| JP5242535B2 (en) | Transport monitoring device and transport monitoring method | |
| JP2012083128A (en) | Learning type defect discrimination processing system, method, and program | |
| JP2006300747A (en) | Inspection device | |
| JP2007058354A (en) | Image analysis apparatus, image analysis method, and program for image analysis processing | |
| WO2021166441A1 (en) | Inspection device and program | |
| JPH06341958A (en) | Inspection method and device for shadow mask | |
| JP7487069B2 (en) | Method and apparatus for identifying tramp metals | |
| JP3025562B2 (en) | Surface condition inspection method using bright and dark illumination | |
| JP2020144727A (en) | Veneer determination system and veneer determination method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7426 Effective date: 20180116 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20180116 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200615 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210421 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210427 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210430 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6879899 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |