JP2019096085A - Information processing device - Google Patents
Information processing device Download PDFInfo
- Publication number
- JP2019096085A JP2019096085A JP2017225377A JP2017225377A JP2019096085A JP 2019096085 A JP2019096085 A JP 2019096085A JP 2017225377 A JP2017225377 A JP 2017225377A JP 2017225377 A JP2017225377 A JP 2017225377A JP 2019096085 A JP2019096085 A JP 2019096085A
- Authority
- JP
- Japan
- Prior art keywords
- parking
- vehicles
- parking lot
- predetermined range
- destination
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000010365 information processing Effects 0.000 title claims abstract description 34
- 238000004364 calculation method Methods 0.000 claims description 22
- 239000000284 extract Substances 0.000 claims description 5
- 230000004308 accommodation Effects 0.000 claims description 2
- 238000003672 processing method Methods 0.000 abstract description 6
- 238000004891 communication Methods 0.000 description 14
- 230000006870 function Effects 0.000 description 10
- 238000000034 method Methods 0.000 description 10
- 230000004048 modification Effects 0.000 description 7
- 238000012986 modification Methods 0.000 description 7
- 230000008569 process Effects 0.000 description 7
- 238000012545 processing Methods 0.000 description 5
- 230000005540 biological transmission Effects 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 238000001514 detection method Methods 0.000 description 3
- 238000004422 calculation algorithm Methods 0.000 description 2
- 238000012937 correction Methods 0.000 description 2
- 230000008859 change Effects 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
Images










Abstract
Description
本発明は、情報処理装置、情報処理方法及び記録媒体に関する。 The present invention relates to an information processing apparatus, an information processing method, and a recording medium.
駐車場の駐車需要を予測する装置として、例えば、特許文献1に記載された駐車場管理装置が提案されている。この駐車場管理装置は、駐車場の利用実績に基づいて、所定のアルゴリズム(例えば最近隣法ベースのアルゴリズム)に従って駐車場の各駐車エリアについて各日の時間帯ごとの混雑度(駐車需要)を算出している。 As an apparatus for predicting the parking demand of a parking lot, for example, a parking lot management apparatus described in Patent Document 1 has been proposed. This parking lot management apparatus calculates congestion degree (parking demand) for each time zone of each day for each parking area of the parking lot according to a predetermined algorithm (for example, nearest neighbor algorithm) based on the utilization result of the parking lot. It is calculated.
しかしながら、上述した従来の駐車場管理装置では、過去の駐車場の利用実績から駐車需要を算出しているため、周辺環境の変化や突発的な事象等による駐車需要の変動に対応できず、精度のよいものではない、という問題が一例として挙げられる。 However, in the conventional parking lot management apparatus described above, the parking demand is calculated from the past parking lot utilization results, so it can not cope with fluctuations in the parking demand due to changes in the surrounding environment, sudden events, etc. The problem of not being good is mentioned as an example.
本発明は、このような問題点に対処することを課題の一例とするものである。即ち、本発明は、例えば、精度良く駐車需要を予測できる情報処理装置、情報処理方法及び記録媒体を提供することを目的としている。 The present invention takes as an example the problem to address such problems. That is, an object of the present invention is to provide, for example, an information processing apparatus, an information processing method, and a recording medium capable of accurately predicting a parking demand.
上述した課題を解決するためになされた請求項1記載の情報処理装置は、第1所定範囲へ所定時間内に到着可能な第2所定範囲内に存在する車両のうち、前記第1所定範囲内に存在する地点を目的地として走行している車両の台数を算出する台数算出手段と、前記車両の台数に基づいて、前記第1所定範囲内に存在する駐車場の駐車需要を予測する第1予測手段と、を備えたことを特徴とする。 The information processing apparatus according to claim 1, which has been made to solve the above-mentioned problem, has a first predetermined range within a first predetermined range of vehicles existing within a second predetermined range that can arrive within a predetermined time. A number calculating unit that calculates the number of vehicles traveling with a point existing at the destination as a destination, and the parking demand of the parking lot existing within the first predetermined range based on the number of vehicles And prediction means.
請求項8記載の情報処理方法は、第1所定範囲へ所定時間内に到着可能な第2所定範囲内に存在する車両のうち、前記第1所定範囲内に存在する地点を目的地として走行している車両の台数を算出する工程と、前記車両の台数に基づいて、前記第1所定範囲内に存在する駐車場の駐車需要を予測する工程と、を備えたことを特徴とする。 The information processing method according to claim 8 travels with a point existing in the first predetermined range as a destination among vehicles existing in the second predetermined range which can arrive in the first predetermined range within a predetermined time. And calculating the parking demand of the parking lot existing within the first predetermined range based on the number of vehicles.
請求項9記載の情報処理プログラムは、情報処理装置を制御するコンピュータが実行する情報処理プログラムであって、第1所定範囲へ所定時間内に到着可能な第2所定範囲内に存在する車両のうち、前記第1所定範囲内に存在する地点を目的地として走行している車両の台数を算出する台数算出手段と、前記車両の台数に基づいて、前記第1所定範囲内に存在する駐車場の駐車需要を予測する第1予測手段として、前記コンピュータを機能させることを特徴とする。 The information processing program according to claim 9 is an information processing program executed by a computer that controls the information processing apparatus, and is among vehicles existing within a second predetermined range that can arrive within a predetermined time within the first predetermined range. And a number calculation means for calculating the number of vehicles traveling with a point existing within the first predetermined range as a destination, and a parking lot existing within the first predetermined range based on the number of vehicles. The computer is made to function as a first prediction means for predicting a parking demand.
請求項10記載の記録媒体は、請求項9に記載の情報処理プログラムが記憶されていることを特徴とする。
A recording medium according to
以下、本発明の一実施形態にかかる情報処理装置を説明する。本発明の一実施形態にかかる情報処理装置は、第1所定範囲へ所定時間内に到着可能な第2所定範囲内に存在する車両のうち、前記第1所定範囲内に存在する地点を目的地として走行している車両の台数を算出する台数算出手段と、前記車両の台数に基づいて、前記第1所定範囲内に存在する駐車場の駐車需要を予測する第1予測手段と、を備えたことを特徴とする。このように、第1所定範囲内に存在する地点を目的地として走行している車両の台数から駐車需要を予測しているので、精度良く駐車需要を予測できる。 Hereinafter, an information processing apparatus according to an embodiment of the present invention will be described. An information processing apparatus according to an embodiment of the present invention is a vehicle located within a second predetermined range that can reach a first predetermined range within a predetermined time, and a point located within the first predetermined range is a destination. And a first prediction means for predicting the parking demand of the parking lot present in the first predetermined range based on the number of vehicles. It is characterized by Thus, since the parking demand is predicted from the number of vehicles traveling with the point existing in the first predetermined range as the destination, the parking demand can be predicted with high accuracy.
また、前記第1予測手段は、前記台数算出手段により求めた車両の台数と、前記第1所定範囲内に存在する全ての駐車場の収容可能台数と、に基づいて各駐車場の駐車需要を予測するようにしてもよい。これにより、より一層、精度良く駐車需要を予測できる。 Further, the first prediction means is configured to calculate the parking demand of each parking lot based on the number of vehicles obtained by the number calculation means and the number of receivable parking spaces of all the parking lots existing within the first predetermined range. It may be predicted. As a result, the parking demand can be predicted more accurately.
また、前記台数算出手段は、前記第2所定範囲に存在する車両のうち、一部を抽出して、前記抽出した一部の前記地点を目的地としている車両と、前記地点を目的地としていない車両と、の割合を求め、求めた割合と、前記第2所定範囲内に存在する全車両の台数と、から前記地点を目的地として走行している車両の台数を求めるようにしてもよい。これにより、一部の車両を抽出することにより、第2所定範囲内の全ての車両について地点を目的地としている車両か否かを判定する場合に比べて、計算処理量を少なくでき、コストダウンを図ることができる。 Further, the number calculation means extracts a part of the vehicles existing in the second predetermined range and does not use the extracted part of the vehicle as a destination and the vehicle as a destination. The number of vehicles traveling with the point as a destination may be calculated from the ratio of the vehicle and the calculated ratio and the number of all vehicles present in the second predetermined range. This makes it possible to reduce the amount of calculation processing compared to the case where it is determined whether or not all vehicles within the second predetermined range are destination vehicles by extracting some of the vehicles, thereby reducing the cost. Can be
また、前記駐車需要予測の要求を受け付ける要求受付手段と、駐車場情報が記憶された第1記憶手段と、前記第1記憶手段に記憶された情報を更新する更新手段と、前記駐車場情報を出力する出力手段と、を更に備え、前記更新手段は、前記第2所定範囲に存在した車両で、その後駐車場に停車した車両から取得した駐車場情報に基づき、前記第1記憶手段に記憶されていない駐車場が存在した場合には新たな駐車場として前記第1記憶手段へ記憶し、前記出力手段は、前記要求受付手段が受け付けた要求元に対して前記新たな駐車場に関する情報を出力するようにしてもよい。これにより、新たな駐車場に関する情報を提供することができる。 In addition, a request receiving unit for receiving a request for the parking demand prediction, a first storage unit storing parking lot information, an updating unit updating information stored in the first storage unit, and the parking lot information The updating means further includes an output means for outputting, and the updating means is stored in the first storage means based on parking lot information acquired from a vehicle which has been in the second predetermined range and which is then stopped at the parking lot. When there is a parking lot that is not stored, it is stored in the first storage means as a new parking lot, and the output means outputs information about the new parking lot to the request source accepted by the request accepting means You may do it. This makes it possible to provide information on a new parking lot.
また、前記台数算出手段は、前記車両から取得した目的地情報に基づいて前記地点を目的地として走行している車両であるか否かを判定するようにしてもよい。これにより、精度良く、1所定範囲内に存在する地点を目的地として走行している車両の台数を求めることができる。 Further, the number calculation means may determine whether or not the vehicle is traveling with the point as a destination based on the destination information acquired from the vehicle. As a result, it is possible to accurately obtain the number of vehicles traveling with the point existing in one predetermined range as the destination.
また、前記台数算出手段は、走行方向又は走行履歴を含む走行情報に基づいて前記地点を目的地として走行している車両であるか否かを判定するようにしてもよい。これにより、精度良く、1所定範囲内に存在する地点を目的地として走行している車両の台数を求めることができる。 Further, the number calculation means may determine whether or not the vehicle is traveling with the point as a destination based on travel information including a travel direction or a travel history. As a result, it is possible to accurately obtain the number of vehicles traveling with the point existing in one predetermined range as the destination.
また、前記駐車場における駐車台数を取得する取得手段と、前記駐車場の最大収容台数、及び、前記取得手段が取得した前記駐車台数の過去の履歴、を記憶する第2記憶手段と、前記第2記憶手段に記憶された前記最大収容台数及び前記駐車台数の過去の履歴、並びに、前記取得手段により取得した現在の前記駐車台数、に基づいて、予測時刻での前記駐車場の予測空車率又は前記予測空車率に応じた情報を予測する第2予測手段と、をさらに備え、前記第2予測手段は、前記駐車需要に基づいて前記予測空車率又は前記予測空車率に応じた情報を補正するようにしてもよい。これにより、精度良く予測空車率又は予測空車率に応じた情報を予測できる。 In addition, an acquisition unit that acquires the number of parked vehicles in the parking lot, a second storage unit that stores the maximum number of accommodated parking spaces, and a past history of the number of parked vehicles acquired by the acquisition unit. [2] The predicted vacant rate of the parking lot at the predicted time or the past record of the maximum number of vehicles and the number of parked vehicles stored in the storage means, and the current number of parked vehicles acquired by the acquisition means, or And second prediction means for predicting information according to the predicted vacant rate, and the second prediction means corrects the information according to the predicted vacant rate or the predicted vacant rate based on the parking demand. You may do so. Thus, it is possible to accurately predict information according to the predicted vacant rate or the predicted vacant rate.
また、本発明の一実施形態にかかる情報処理方法は、第1所定範囲へ所定時間内に到着可能な第2所定範囲内に存在する車両のうち、前記第1所定範囲内に存在する地点を目的地として走行している車両の台数を算出する工程と、前記車両の台数に基づいて、前記第1所定範囲内に存在する駐車場の駐車需要を予測する工程と、を備えたことを特徴とする。このように、第1所定範囲内に存在する地点を目的地として走行している第1車両の台数から駐車需要を予測しているので、精度良く駐車需要を予測できる。 Further, in the information processing method according to the embodiment of the present invention, a point existing in the first predetermined range among vehicles existing in the second predetermined range that can reach the first predetermined range within the predetermined time is The method further comprises the steps of: calculating the number of vehicles traveling as a destination; and predicting the parking demand of the parking lot existing within the first predetermined range based on the number of vehicles. I assume. As described above, since the parking demand is predicted from the number of first vehicles traveling with the point existing in the first predetermined range as the destination, the parking demand can be predicted with high accuracy.
また、上述した情報処理方法をコンピュータにより実行させる情報処理プログラムとしてもよい。このようにコンピュータにより実行されるプログラムであるので、専用のハードウェア等が不要となり、汎用の情報処理装置にインストールして機能させることができる。 In addition, an information processing program that causes a computer to execute the above-described information processing method may be used. Since the program is executed by the computer as described above, dedicated hardware and the like are not required, and the program can be installed and functioned in a general-purpose information processing apparatus.
また、上述した情報処理プログラムをコンピュータ読み取り可能な記録媒体に格納してもよい。このようにすることにより、当該プログラムを機器に組み込む以外に単体でも流通させることができ、バージョンアップ等も容易に行える。 Further, the above-described information processing program may be stored in a computer readable recording medium. By doing this, it is possible to distribute the program alone as well as incorporating the program into the device, and to easily upgrade the version.
以下、本実施例にかかる情報処理装置としてのサーバ装置を組み込んだ情報提供システムについて図1〜図4を参照して説明する。 Hereinafter, an information providing system incorporating a server apparatus as an information processing apparatus according to the present embodiment will be described with reference to FIGS. 1 to 4.
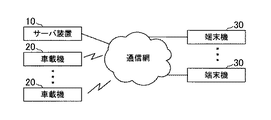
情報提供システム1は、情報処理装置としてのサーバ装置10と、サーバ装置10と通信可能な端末である車載機20と、サーバ装置10と通信可能な端末である端末機30と、を備えている。車載機20は、例えば車両などに搭載されたナビゲーション装置から構成される。本実施例では、サーバ装置10と通信可能な端末として車両に搭載された車載機20を例に挙げて説明するが、スマートフォンなどの携帯端末であってもよい。
The information providing system 1 includes a
車載機20は、ユーザの操作により目的地の設定が行われると、目的地までの経路案内を行うナビゲーション機能を有している。また、車載機20は、ユーザにより目的地の設定が行われると、サーバ装置10に対して目的地周辺の駐車場の予測空車率などの送信要求を行うことができる。なお、予測空車率とは、目的地への到着予想時刻(予測時刻)における当該目的地周辺の駐車場の空車率(空いている駐車スペースの台数/収容可能台数)の予測値である。車載機20は、送信要求に応じてサーバ装置10から予測空車率を受信すると、図5に示すように、目的地周辺の地図上に表示し、地図上の駐車場Pk1〜Pkn(nは任意の整数)の位置にそれぞれの予測空車率を表示する。
The in-
端末機30は、各駐車場に設置されたコンピュータなどで構成されている。端末機30は、サーバ装置10に対して設置された駐車場の駐車台数を送信する。
The terminal 30 is configured of a computer or the like installed in each parking lot. The terminal 30 transmits the number of parked parking spaces to the
サーバ装置10は、インターネットや公衆回線網などの通信網に接続され、車載機20や端末機30と通信可能に設けられている。
The
サーバ装置10は、図2に示すように、制御部11と、通信部12と、記憶部13と、を備えている。
As illustrated in FIG. 2, the
制御部11は、例えばRAM(Random Access Memory)やROM(Read Only Memory)などのメモリを備えたCPU(Central Processing Unit)を含んで構成されている。制御部11は、サーバ装置10全体の制御を司る。制御部11は、車載機20から予測空車率の送信要求を受信すると、目的地周辺の駐車場の予測空車率を算出して、車載機20に送信する。また、制御部11は、目的地周辺の駐車場の駐車需要を算出し、算出した駐車需要に基づいて上記予測空車率を補正する。
The control unit 11 is configured to include, for example, a central processing unit (CPU) including a memory such as a random access memory (RAM) or a read only memory (ROM). The control unit 11 controls the
本実施例において、駐車需要は、現在は目的地周辺の駐車場に駐車していないが、到着予想時刻よりも前に目的地周辺に到達して駐車場に駐車してしまう車両の台数である。上記駐車需要は、図6に示すように、駐車需要予測エリア(第2所定範囲)A2内に存在する車両のうち、駐車候補エリア(第1所定範囲)A1に存在する地点を目的地として走行している車両の総台数に基づいて求められる。なお、駐車候補エリアA1は目的地周辺のエリアであり、駐車需要予測エリアA2は駐車候補エリアA1に到着予想時刻よりも前に到着可能なエリアである。 In the present embodiment, the parking demand is the number of vehicles that are not currently parked in the parking lot around the destination, but reach around the destination and parked in the parking lot before the expected arrival time. . The parking demand is, as shown in FIG. 6, traveled with a point existing in the parking candidate area (first predetermined range) A1 among the vehicles existing in the parking demand prediction area (second predetermined range) A2 as a destination. It is determined based on the total number of vehicles in use. The parking candidate area A1 is an area around the destination, and the parking demand prediction area A2 is an area that can arrive at the parking candidate area A1 before the estimated arrival time.
通信部12は、インターネットや公衆回線網などの通信網を介して車載機20や端末機30と通信を行う。
The
記憶部13は、サーバ装置10での処理に必要な各種情報が記憶される。記憶部13は、駐車状況データベース(以下、DB)13Aと、目的地周辺状況DB13Bと、予測空車率DB13Cと、第1記憶手段としての駐車場DB13Dと、を有している。
The
駐車状況DB13Aは、各端末機30から定期的に送信される駐車台数の履歴が記憶されるメモリである。目的地周辺状況DB13Bは、駐車需要予測エリアA2内に存在する車載機20から送信される位置情報の履歴や目的地が記憶されるメモリである。予測空車率DB13Cは、制御部11が算出した各駐車場の予測空車率が記憶されるメモリである。駐車場DB13Dは、各駐車場に関する情報(位置、最大駐車台数、専用駐車スペースの有無など)が記憶されるメモリである。
The
本実施例において、サーバ装置10は、1台しか設けられていないが、これに限定されるものではない。サーバ装置10は、複数台設けてもよく、例えば、制御部が行う動作と通信部が行う動作を別々のサーバ装置10(演算サーバ装置と配信サーバ装置)に分割してもよい。このような場合、各サーバ装置10は互いに離れた位置に設置され、通信網を通じて通信し合うように構成されていてもよい。
In the present embodiment, only one
車載機20は、図3に示すように、制御部21と、通信部22と、GPS受信部23と、記憶装置24と、操作部25と、表示部26と、を備えている。
As shown in FIG. 3, the in-
制御部21は、例えばRAMやROMなどのメモリを備えたCPUで構成され、車載機20全体の制御を司る。
The
通信部22は、サーバ装置10と通信を行う。なお、本実施例では、通信部22が車載機20に一体に設けられている例を示すが、カード型の通信装置や携帯電話をケーブル等で接続するなど通信部を別体として構成され、車載機20と着脱自在となっていてもよい。
The
GPS受信部23は、公知であるように複数のGPS(Global Positioning System)衛星から発振される電波を定期的に受信して、現在の位置情報及び時刻を求めて制御部21に出力する。なお、本実施例では、GPS受信部23が車載機20に一体に設けられている例を示すが、GPS受信部23が別体として構成され、車載機20と着脱自在になっていてもよい。
The
記憶装置24は、例えばハードディスクや不揮発性メモリなどで構成されており、制御部21からの制御により読み書きがなされる。
The
操作部25は、ユーザが車載機20の各種操作を行うために設けられている。表示部26は、図5に示すように、サーバ装置10から送信される各駐車場の予測空車率が表示される。
The
端末機30は、図4に示すように、制御部31と、通信部32と、入力部33と、を備えている。
As shown in FIG. 4, the terminal 30 includes a
制御部31は、例えばRAMやROMなどのメモリを備えたCPUで構成され、端末機30全体の制御を司る。
The
通信部32は、サーバ装置10と通信を行う。
The
ところで、駐車場には複数の駐車スペースが設けられている。各駐車スペースには、車両の有無を検出して空き状況を検出するセンサが設けられている。入力部33には、複数の駐車スペースに設けられたセンサの検出結果が入力される。
By the way, a plurality of parking spaces are provided in the parking lot. Each parking space is provided with a sensor that detects the presence or absence of a vehicle and detects a vacant state. Detection results of sensors provided in a plurality of parking spaces are input to the
次に、上述した構成の情報提供システム1の動作の一例について図7を参照して説明する。図7のフローチャートはサーバ装置10で実行される。また、サーバ装置10の制御部が、このフローチャートをコンピュータプログラムとすることで、情報提供方法をコンピュータにより実行させる情報提供プログラムとなる。
Next, an example of the operation of the information providing system 1 configured as described above will be described with reference to FIG. The flowchart of FIG. 7 is executed by the
まず、各端末機30の制御部31(以下、単に「端末機30」と言う)は、定期的に、入力部33から入力されるセンサ検出結果から駐車台数を求め、求めた駐車台数及び最大収容台数をサーバ装置10に送信する。サーバ装置10の制御部11(以下、単に「サーバ装置10」と言う)は、取得手段、記憶手段、第2記憶手段として働き、端末機30から受信した駐車台数及び最大収容台数を駐車状況DB13Aに記憶する。駐車状況DB13Aには、例えば、下記の表1に示すように、駐車場別に現在の駐車台数及び駐車台数の過去の履歴が記憶される。なお、端末機30から送信された最新の駐車台数が現在の駐車台数となる。

車載機20の制御部21(以下、単に「車載機20」と言う)は、ユーザの操作により目的地が設定されると(ステップS10でY)、サーバ装置10に対して予測空車率の送信要求を送信する(ステップS11)。なお、上記送信要求には、車載機20に設定された目的地やGPS受信部23から出力された位置情報が含まれる。
When the destination is set by the operation of the user (hereinafter, referred to simply as "in-
サーバ装置10は、要求受付手段として働き、予測空車率の送信要求を受信すると(ステップS20でY)、駐車場DB13Dから目的地周辺の駐車場を取得する(ステップS21)。図5に示す例では、サーバ装置10は、駐車場PK1〜Pknを取得する。次に、サーバ装置10は、駐車状況DB13AからステップS21で取得した駐車場PK1〜Pknの現在の駐車台数及び駐車台数の過去の履歴を取得する(ステップS22)。その後、サーバ装置10は、目的地への到着予想時刻を算出する(ステップS23)。
The
次に、サーバ装置10は、第2予測手段、予測手段として働き、ステップS22で取得した現在の駐車台数及び駐車台数の過去の履歴から到着予想時刻における各駐車場Pk1〜Pknの予測空車率を算出する(ステップS24)。その後、サーバ装置10は、駐車需要予測エリアA2に存在する車載機20との通信により、目的地周辺の駐車場に対する駐車需要を算出する(ステップS25)。
Next, the
その後、サーバ装置10は、ステップS25で算出した駐車需要に基づいてステップS24で算出した予測空車率を補正し(ステップS26)、出力手段として働き、補正した予測空車率を車載機20に送信して(ステップS27)、ステップS20に戻る。車載機20は、サーバ装置10から予測空車率を受信すると、図5に示すように表示部26に表示して(ステップS13)、処理を終了する。
After that, the
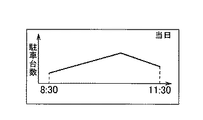
次に、上述したステップS23における予測空車率の算出の詳細について、図8のフローチャートを参照して説明する。まず、サーバ装置10は、駐車場Pk1〜Pkn毎の、現在時刻から所定時間T1前までの時間帯における駐車台数の履歴(以下、「当日の駐車台数の履歴」と言う)を駐車状況DB13Aから取得する(ステップS231)。例えば、現在時刻を11:30、所定時間T1を3時間とすると、ステップS231においては、図9に示すように、当日の8:30〜11:30までの駐車台数の履歴が抽出される。
Next, the details of the calculation of the predicted vacancy rate in step S23 described above will be described with reference to the flowchart of FIG. First, the
次に、サーバ装置10は、駐車場Pk1〜Pkn毎の、前日以前の複数日分の現在時刻と同一時刻から所定時間T1前までの時間帯における駐車台数の過去の履歴(以下、「前日以前の駐車台数の履歴」)を駐車状況DB13Aから取得する(ステップS232)。ステップS232においては、前日、前々日などの複数日分の8:30〜11:30までの駐車台数の履歴が取得される。
Next, the
次に、サーバ装置10は、分類手段として働き、複数日分の8:30〜11:30までの駐車台数の履歴をその変動パターンによって分類する(ステップS233)。ステップS233の分類は、例えば周知の類似度計算によって行う。類似度計算は、例えば、2日分の駐車台数の履歴のプロット点の差を合算し合算値が所定値以内であれば、その2日分の駐車台数の履歴を同一分類とする。このように分類した結果、例えば、図9に示すように、平日である日d11〜d1n(nは任意の整数)の駐車台数の履歴はパターンPa、休日である日d21〜d2m(mは任意の整数)の駐車台数の履歴はパターンPbのように2つに分類されることが多い。なお、図10に示す例では、駐車台数の履歴は2つに分類されているが、分類数は駐車場の環境などの要素により、1つに分類される場合も、3つ以上に分類される場合もある。
Next, the
次に、サーバ装置10は、判定手段として働き、ステップS232で求めた当日の8:30〜11:30までの駐車台数の履歴が、ステップS233で分類したパターンPa、Pbの何れに分類されかを判定する(ステップS234)。このステップS234で判定されたパターンに分類される日を、当日の駐車台数の履歴と変動パターンが同一分類とみなせる日と判定することができる。
Next, the
その後、サーバ装置10は、ステップS234で同一分類とみなせる各日の現在時刻及び到着予想時刻と同一時刻の駐車台数を駐車状況DB13Aから取得する(ステップS235)。具体的に説明すると、サーバ装置10は、ステップS234でパターンPaに分類されると判定されると、図11に示すように、パターンPaに分類された日d11〜d1nの現在時刻11:30及び到着予想時刻12:00と同一時刻の駐車台数P1(t_bg)〜Pn(t_bg)、P1(t_ed)〜Pn(t_ed)が抽出される。
Thereafter, the
次に、サーバ装置10は、下記の式(1)を用いて各駐車場Pk1〜Pknの予測空車率を算出し、予測空車率DB13Cに格納して(ステップS236)、処理を終了する。
P:現在時刻t_bgの駐車台数
Pi(t_bg):各日d11〜d1nにおける現在時刻t_bgと同一時刻の駐車台数
Pi(t_ed):各日d11〜d1nにおける到着予想時刻t_edと同一時刻の駐車台数
n:各日d11〜d1nの総和
St:最大収容台数
Next, the
P: Number of parked cars at current time t_bg
Pi (t_bg): Number of parked cars at the same time as current time t_bg on each day d11 to d1 n
Pi (t_ed): number of parked vehicles at the same time as estimated arrival time t_ed on each day d11 to d1 n n: sum of each day d11 to d1 n
St: Maximum capacity
次に、上述したステップS26における駐車需要の算出の詳細について、図12のフローチャートを参照して説明する。まず、サーバ装置10は、目的地周辺の駐車候補エリアA1に所定時間T2内に到着できる駐車需要予測エリアA2を計算する(ステップS261)。本実施例では、所定時間T2は、到着予想時刻から現在時刻を差し引いた時間(目的地までの所要時間)に設定される。
Next, the details of the calculation of the parking demand in step S26 described above will be described with reference to the flowchart of FIG. First, the
ステップS261においてサーバ装置10は、例えば、目的地を中心とした所定時間T2に応じた半径の範囲内を駐車需要予測エリアA2とすることが考えられる。また、サーバ装置10は、目的地を出発地として沢山のルートを演算し、所定時間T2内に到着できるエリアを駐車需要予測エリアA2とすることも考えられる。
In step S261, for example, it is conceivable that the
次に、サーバ装置10は、駐車需要予測エリアA2内に存在する全ての車載機20と通信して、駐車需要予測エリアA2内に存在する車載機20の台数Mを求める(ステップS262)。ステップS262において、サーバ装置10は、例えば、駐車需要予測エリアA2内に設置された基地局から位置情報の履歴(走行履歴)や目的地の要求信号を送信し、返信してきた車載機20を駐車需要予測エリアA2内にいる車載機20とする。サーバ装置10は、車載機20から受信した位置情報の履歴や目的地は目的地周辺状況DB13Bに記憶する。
Next, the
次に、サーバ装置10は、目的地周辺状況DB13Bからランダムで一定数の車載機20をサンプリングする(ステップS263)。その後、サーバ装置10は、サンプリングした一定数の車載機20について、駐車候補エリアA1内を目的地としている車両と駐車候補エリアA1内を目的地として設定していない車両との割合を算出する(ステップS264)。
Next, the
ステップS264において、サーバ装置10は、駐車候補エリアA1内の地点を目的地として設定している車載機20を、駐車候補エリアA1内を目的地としている車両と判定する。また、サーバ装置10は、位置情報の履歴から走行方向を求め、駐車候補エリアA1に向かっている車載機20を、駐車候補エリアA1内を目的地としている車両と判定する。そして、サーバ装置10は、駐車候補エリアA1内を目的地としている車両の台数n1と、目的地としていない車両の台数n2と、から割合n1/(n1+n2)を算出する。
In step S264, the
その後、サーバ装置10は、台数算出手段として働き、ステップS262で求めた(算出した)台数MにステップS264で求めた割合n1/(n1+n2)を乗じる。このM・n1/(n1+n2)は、駐車需要予測エリアA2内に存在する車載機20(車両)のうち、駐車候補エリアA1内に存在する地点を目的地として走行している車両の台数である。サーバ装置20は、第1予測手段として働き、M・n1/(n1+n2)を駐車候補エリアA1内の駐車場Pk1〜Pknの総駐車需要Prとして求め(ステップS265)、処理を終了する。
After that, the
次に、上述したステップS27における予測空車率の補正の詳細について説明する。まず、サーバ装置10は、第1予測手段として働き、ステップS26で求めた駐車需要を使って、下記の式(2)を用いて駐車場Pk1〜Pkn毎の個別駐車需要を求める。
Pst(i):駐車場Pkiの最大収容数
Pr:総駐車需要
N:駐車候補エリアA1内に存在する全ての駐車場Pk1〜Pknの総和
Next, the details of the correction of the predicted vacant rate in step S27 described above will be described. First, the
Pst (i): Maximum capacity of parking lot Pki
Pr: Total parking demand N: Sum of all parking lots Pk1 to Pkn existing in the parking candidate area A1
その後、サーバ装置10は、下記の式(3)、(4)を用いて各駐車場Pk1〜Pknの予測空車率を補正する。
上述した実施例によれば、サーバ装置10は、現在の駐車台数に基づいて予測時刻(到着予想時刻)での駐車場の予測空車率を予測しているため、普段とは異なる駐車需要が発生しても、精度良く予測空車率を予測することができる。
According to the embodiment described above, since the
また、上述した実施例によれば、サーバ装置10は、算出した予測空車率を車載機20に送信し、車載機20が受信した予測空車率を表示部26に表示している。これにより、ユーザに各駐車場PK1〜Pknの予測空車率を報知することができる。
Further, according to the embodiment described above, the
また、上述した実施例によれば、予測時刻は、駐車場への車両の到着予想時刻に設定されている。これにより、到着予想時刻での予測空車率を予測できる。 Further, according to the above-described embodiment, the predicted time is set to the estimated arrival time of the vehicle at the parking lot. As a result, the predicted vacancy rate at the estimated arrival time can be predicted.
また、上述した実施例によれば、サーバ装置10は、前日以前の到着予想時刻と同一時刻を含む時間帯における駐車台数の過去の履歴に基づいて予測している。これにより、より一層、精度良く予測空車率を予測することができる。
Further, according to the embodiment described above, the
また、上述した実施例によれば、サーバ装置10は、前日以前の駐車台数の履歴を分類し、当日の駐車台数の履歴と変動パターンが同一分類とみなせる日を判定し、その日の駐車台数の履歴に基づいて予測空車率を予測している。これにより、より一層、精度良く予測空車率を予測することができる。また、駐車台数の履歴として、休日か平日かを区別しなくても、精度良く予測空車率を予測することができる。
Further, according to the embodiment described above, the
また、上述した実施例によれば、サーバ装置10は、駐車候補エリアA1内に存在する地点を目的地として走行している車両の台数から駐車需要を予測しているので、精度良く駐車需要を予測できる。
Further, according to the embodiment described above, the
また、上述した実施例によれば、サーバ装置10は、総駐車需要Prと、駐車候補エリアA1内に存在する全ての駐車場の収容可能台数と、に基づいて各駐車場Pk1〜Pknの駐車需要を予測している。これにより、より一層、精度良く駐車需要を予測できる。
Further, according to the embodiment described above, the
また、上述した実施例によれば、サーバ装置10は、駐車需要予測エリアA2に存在する車両のうち、一部を抽出して、駐車候補エリアA1内を目的地としている車両と駐車候補エリアA1内を目的地として設定していない車両との割合を求め、求めた割合から総駐車需要Prを求めている。これにより、一部の車両を抽出することにより、駐車需要予測エリアA2内の全ての車両について目的地としている車両か否かを判定する場合に比べて、計算処理量を少なくでき、コストダウンを図ることができる。
Further, according to the embodiment described above, the
また、上述した実施例によれば、サーバ装置10は、車載機20から取得した目的地情報に基づいて駐車候補エリアA1内に存在する地点を目的地として走行している車両であるか否かを判定している。これにより、精度良く、駐車候補エリアA1内に存在する地点を目的地として走行している車両の台数を求めることができる。
Further, according to the embodiment described above, whether or not the
また、上述した実施例によれば、サーバ装置は、車載機20から取得した位置情報の履歴(走行履歴)から求めた走行方向(走行情報)に基づいて駐車候補エリアA1内に存在する地点を目的地として走行している車両であるか否かを判定している。これにより、精度良く、駐車候補エリアA1内に存在する地点を目的地として走行している車両の台数を求めることができる。
Further, according to the above-described embodiment, the server device detects a point existing in the parking candidate area A1 based on the traveling direction (traveling information) obtained from the history (traveling history) of the position information acquired from the in-
また、上述した実施例によれば、サーバ装置10は、駐車需要に基づいて予測空車率を補正している。これにより、精度良く予測空車率を予測できる。
Further, according to the above-described embodiment, the
また、上述した実施例によれば、サーバ装置10は、端末機30から定期的に駐車台数と共に最大収容台数を受信している。これにより、例えば臨時駐車場を設けるなど最大収容台数の変動にも対応することができる。
Further, according to the embodiment described above, the
なお、上述した実施例によれば、予測時刻は、到着予測時刻でなくてもよく、現在時刻よりも先(未来)の時刻に設定されていればよい。例えば、ユーザが入力した予定、目標時刻や、サーバ装置10が演算した目的地への推奨到着時刻を予測時刻としてもよい。
Note that according to the embodiment described above, the predicted time may not be the predicted arrival time, and may be set to a time later (future) than the current time. For example, a schedule input by the user, a target time, or a recommended arrival time to a destination calculated by the
また、上述した実施例によれば、サーバ装置10は、到着予想時刻における予測空車率を予測していたが、これに限ったものではない。サーバ装置10は、例えば、到着予想時刻における予測駐車台数や、予測空車台数など予測空車率に応じた情報を予測してもよい。予測駐車台数、予測空車台数は、下記の式(5)、(6)から求めることができる。この場合、予測空車率を求めなくてもよい。
また、予測空車率の予測方法としては、上述した実施例に限定されるものではない。サーバ装置10は、最大収容台数、駐車台数の過去の履歴、現在の駐車台数に基づいて予測空車率を予測できればよい。例えば、サーバ装置10は、前日、前々日などの複数日分の現在時刻と同一時刻に対する到着予想時刻と同一時刻の駐車台数の増減量の平均値を求め、当日の現在時刻の駐車台数に求めた増減量の平均値を加算して、予測駐車台数を求め、求めた予測駐車台数から予測空車率を求めるようにしてもよい。または、サーバ装置10は、前日、前々日などの複数日分の到着予想時刻と同一時刻の駐車台数の平均値などに基づいて現在の駐車台数を補正して、予測空車率を求めるようにしてもよい。
Moreover, as a prediction method of a predicted vacant rate, it is not limited to the Example mentioned above. The
また、上述した実施例では、サーバ装置10は、予測空車率を駐車需要で補正していたが、駐車需要で補正することは必須ではない。
Further, in the above-described embodiment, the
また、上述した実施例によれば、サーバ装置10は、駐車需要予測エリアA2に存在する車両のうち、一部を抽出して、総駐車需要Prを求めていたがこれに限ったものではない。駐車需要予測エリアA2に存在する全ての車両について駐車候補エリアA1内に存在する地点を目的地として走行している車両であるか否かを判定して総駐車需要Prを求めてもよい。
Further, according to the above-described embodiment, the
また、上述した実施例によれば、サーバ装置10は、駐車需要に基づいて予測空車率を補正していたが、これに限ったものではない。サーバ装置10は、駐車需要を車載機20に送信してユーザに提供してもよい。
Further, according to the above-described embodiment, the
また、上述した実施例では、駐車需要を空車率の補正に用いたが、駐車需要の利用はこれに限ったものではない。例えば、目的地とするエリアに対する駐車需要が高いのか低いのかを示す指標値として用いてもよい。車載機20は、上記指標値を表示してユーザに報知する。さらに、予測される駐車需要が所定値を上回って高い場合には、駐車場検索範囲を広げる事や、公共交通機関の利用を促すようにしても良い。
Moreover, although the parking demand was used for correction | amendment of the vacant rate in the Example mentioned above, utilization of the parking demand is not restricted to this. For example, it may be used as an index value indicating whether the parking demand for the destination area is high or low. The in-
[変形例1]
次に、上述した実施例において、サーバ装置10が、高精度地図等を用いて予測空車率の要求車両が停車可能な駐車場か否かを加味する場合の変形例を示す。サーバ装置10は、予測空車率の要求があると、要求車両の車両情報を取得する。車両情報とは、例えば、軽自動車であるか否か、車両幅や車両長、車両高などの車両の大きさに関する情報である。車両が軽自動車でない場合には、前述した空車率の算出において、目的地周辺の駐車場内の高精度地図等を用いて、駐車場に存在する駐車スペースに軽自動車専用の駐車スペースが無いか、駐車スペース毎に車両が駐車するのに十分な大きさであるかを判断し、不適切と判定した駐車スペースについては無視して算出を行う。すなわち、現在の専用駐車スペースに止まっている駐車台数や、最大収容台数に加算せずに算出を行う。
[Modification 1]
Next, in the embodiment described above, a modified example will be described in which the
また、上述の変形例1では軽自動車専用駐車スペースを例に挙げたが、例えば車椅子専用駐車場でも、要求車両の車両情報として車椅子の方が乗車している車両か否かを取得すれば、上記と同様の処理が可能である。 Moreover, although the parking space for mini vehicles was mentioned as an example in the above-mentioned modification 1, for example, even if it is a wheelchair exclusive parking lot, if it is a vehicle on which the wheelchair is riding is acquired as vehicle information of a request vehicle, The same process as described above is possible.
上述の変形例1によって、サーバ装置10は車両に合った駐車場の空車率を算出することが出来る。
According to the first modification described above, the
[変形例2]
上述した実施例において駐車状況は、各駐車場に設置された端末機30から受信した情報によって生成されるが、これに限らず駐車場に存在する車両が備えるライダやカメラ等の物体認識手段から受信した情報に基づいて、駐車状況を認識しても良い。
[Modification 2]
In the embodiment described above, the parking situation is generated by the information received from the terminal 30 installed in each parking lot, but not limited to this, from the object recognition means such as a rider or a camera provided in the vehicle existing in the parking lot The parking status may be recognized based on the received information.
[変形例3]
次に、駐車場DB13Dに存在しない駐車場の検出について説明する。例えば臨時駐車場や新設駐車場が駐車場検索範囲に存在した場合、駐車場DB13Dには存在しないため、候補表示や空車率の計算には加味されない。そこで、サーバ装置10は、空車率算出の際に駐車需要予測エリアA2に存在していた車両について、その後に駐車候補エリア内で駐車した車両を抽出する。サーバ装置10は、更新手段として働き、駐車した駐車場が駐車場DB13Dに存在するか否かを判定し、存在しない場合には、新規の駐車場として駐車場DB13Dに記憶する。記憶する際には、例えば、位置情報や、車両が備えるライダやカメラ等の物体認識手段または運転者に情報提供を促す表示によって、最大駐車台数や、現在の駐車台数、臨時駐車場のような一時的または一定期間開放される駐車場か、駐車場内の物体認識データから作成した場内地図などを記憶する。これによって、サーバ装置10は、出力手段として働き、駐車場を案内している車両に対して新規の駐車場があることを知らせたり、空車率を新規の駐車場を加味した形で更新することが出来る。上述の変形例3によって、駐車場DB13Dに存在しない駐車場があったとしても、より正確な空車率を算出することが出来る。さらに、新たな駐車場の情報を収集することで、今後の駐車場案内に活用することが出来る。
[Modification 3]
Next, detection of a parking lot that does not exist in the parking lot DB 13D will be described. For example, when a temporary parking lot or a new parking lot is present in the parking lot search range, it is not included in the parking lot DB 13D, so it is not added to the candidate display or the calculation of the vacant rate. Therefore, the
なお、本発明は上記実施形態に限定されるものではない。即ち、本発明の骨子を逸脱しない範囲で種々変形して実施することができる。 The present invention is not limited to the above embodiment. That is, various modifications can be made without departing from the scope of the present invention.
11 制御部(台数算出手段、第1予測手段、取得手段、第2記憶手段、第2予測手段、要求受付手段、更新手段、出力手段)
13D 駐車DB(第1記憶手段)
A1 駐車候補エリア(第1所定範囲)
A2 駐車需要予測エリア(第2所定範囲)
11 control unit (number calculation means, first prediction means, acquisition means, second storage means, second prediction means, request acceptance means, update means, output means)
13D parking DB (first storage means)
A1 Parking candidate area (first predetermined range)
A2 Parking demand forecast area (2nd predetermined range)
Claims (10)
前記車両の台数に基づいて、前記第1所定範囲内に存在する駐車場の駐車需要を予測する第1予測手段と、を備えたことを特徴とする情報処理装置。 Calculation of the number of vehicles traveling with the point existing in the first predetermined range as the destination among the vehicles existing in the second predetermined range that can arrive in the first predetermined range within the predetermined time Means,
An information processing apparatus comprising: first prediction means for predicting a parking demand of a parking lot existing within the first predetermined range based on the number of vehicles.
駐車場情報が記憶された第1記憶手段と、
前記第1記憶手段に記憶された情報を更新する更新手段と、
前記駐車場情報を出力する出力手段と、
を更に備え、
前記更新手段は、前記第2所定範囲に存在した車両で、その後駐車場に停車した車両から取得した駐車場情報に基づき、前記第1記憶手段に記憶されていない駐車場が存在した場合には新たな駐車場として前記第1記憶手段へ記憶し、
前記出力手段は、前記要求受付手段が受け付けた要求元に対して前記新たな駐車場に関する情報を出力することを特徴とする請求項3に記載の情報処理装置。 Request receiving means for receiving a request for the parking demand prediction;
First storage means in which parking lot information is stored;
Updating means for updating the information stored in the first storage means;
An output unit that outputs the parking lot information;
And further
The updating unit is a vehicle existing in the second predetermined range, and based on parking lot information acquired from a vehicle stopped at a parking lot thereafter, when a parking lot not stored in the first storage unit is present It stores in the first storage means as a new parking lot,
4. The information processing apparatus according to claim 3, wherein the output unit outputs information on the new parking lot to a request source received by the request receiving unit.
前記駐車場の最大収容台数、及び、前記取得手段が取得した前記駐車台数の過去の履歴、を記憶する第2記憶手段と、
前記第2記憶手段に記憶された前記最大収容台数及び前記駐車台数の過去の履歴、並びに、前記取得手段により取得した現在の前記駐車台数、に基づいて、予測時刻での前記駐車場の予測空車率又は前記予測空車率に応じた情報を予測する第2予測手段と、をさらに備え、
前記第2予測手段は、前記駐車需要に基づいて前記予測空車率又は前記予測空車率に応じた情報を補正することを特徴とする請求項1〜5何れか1項に記載の情報処理装置。 Acquisition means for acquiring the number of parked vehicles in the parking lot;
A second storage unit that stores the maximum number of vehicles accommodated in the parking lot and a history of the number of parked vehicles acquired by the acquisition unit;
The predicted vacant car of the parking lot at the predicted time based on the past record of the maximum accommodation number and the number of parked vehicles stored in the second storage unit and the current number of parked vehicles acquired by the acquisition unit The second prediction means for predicting information according to the rate or the estimated empty rate;
The information processing apparatus according to any one of claims 1 to 5, wherein the second prediction unit corrects the information according to the predicted vacant rate or the predicted vacant rate based on the parking demand.
前記車両の台数に基づいて、前記第1所定範囲内に存在する駐車場の駐車需要を予測する工程と、を備えたことを特徴とする情報処理方法。 Calculating the number of vehicles traveling with the point existing in the first predetermined range as the destination among the vehicles existing in the second predetermined range that can arrive in the first predetermined range within the predetermined time; ,
And V. predicting a parking demand of a parking lot existing in the first predetermined range based on the number of vehicles.
第1所定範囲へ所定時間内に到着可能な第2所定範囲内に存在する車両のうち、前記第1所定範囲内に存在する地点を目的地として走行している車両の台数を算出する台数算出手段と、
前記車両の台数に基づいて、前記第1所定範囲内に存在する駐車場の駐車需要を予測する第1予測手段として、前記コンピュータを機能させることを特徴とする情報処理プログラム。 An information processing program executed by a computer that controls an information processing apparatus,
Calculation of the number of vehicles traveling with the point existing in the first predetermined range as the destination among the vehicles existing in the second predetermined range that can arrive in the first predetermined range within the predetermined time Means,
An information processing program causing the computer to function as a first prediction unit that predicts a parking demand of a parking lot existing in the first predetermined range based on the number of vehicles.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017225377A JP2019096085A (en) | 2017-11-24 | 2017-11-24 | Information processing device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017225377A JP2019096085A (en) | 2017-11-24 | 2017-11-24 | Information processing device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2019096085A true JP2019096085A (en) | 2019-06-20 |
Family
ID=66971782
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017225377A Pending JP2019096085A (en) | 2017-11-24 | 2017-11-24 | Information processing device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2019096085A (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020085672A (en) * | 2018-11-27 | 2020-06-04 | 東芝テック株式会社 | Parking lot search device |
| JP2021099768A (en) * | 2019-12-23 | 2021-07-01 | 財團法人工業技術研究院Industrial Technology Research Institute | Parking space determination system and method thereof |
-
2017
- 2017-11-24 JP JP2017225377A patent/JP2019096085A/en active Pending
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020085672A (en) * | 2018-11-27 | 2020-06-04 | 東芝テック株式会社 | Parking lot search device |
| JP2021099768A (en) * | 2019-12-23 | 2021-07-01 | 財團法人工業技術研究院Industrial Technology Research Institute | Parking space determination system and method thereof |
| JP7005679B2 (en) | 2019-12-23 | 2022-01-21 | 財團法人工業技術研究院 | Parking space judgment system and its method |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6094543B2 (en) | Origin / Destination Extraction Device, Origin / Destination Extraction Method | |
| CN113029177B (en) | Frequency-based traffic travel characterization | |
| EP3051259B1 (en) | Navigation system with map update mechanism and method of operation thereof | |
| US20160025503A1 (en) | Vehicle parking management | |
| US10120381B2 (en) | Identifying significant locations based on vehicle probe data | |
| JP5920452B2 (en) | Mobile information processing apparatus, mobile information processing method, and driving support system | |
| JP5076973B2 (en) | Parking information provision system, server, information terminal | |
| US9513135B2 (en) | Stochastic range | |
| EP2270764A1 (en) | Route guidance server, navigation apparatus, route guidance system, and route guidance method | |
| CN104854429A (en) | Methods and systems for generating a horizon for use in an advanced driver assistance system (adas) | |
| CN105683716A (en) | Contextual traffic or transit alerts | |
| JP5015756B2 (en) | Traffic information distribution system, probe information generation apparatus and traffic information distribution apparatus constituting the system | |
| CN103109161A (en) | Navigation device & method | |
| CN101390048A (en) | Intelligent location based services and navigation hybrid system | |
| JP2006189415A (en) | Method and system for determining minimum time route | |
| US10594806B2 (en) | Management of mobile objects and resources | |
| US20170074670A1 (en) | Travel time data processing apparatus, travel time data processing method and program | |
| JP2010210284A (en) | Traffic management device and traffic management method | |
| US10890456B2 (en) | Vehicle and method of providing route guidance using public transportation | |
| JP2016085080A (en) | Avoidance route search system, avoidance route search device, avoidance route search method, and computer program | |
| JP4502766B2 (en) | Route search device | |
| JP2013053999A (en) | Navigation system, navigation device, information processor, and route search method | |
| JP4934711B2 (en) | Route search device | |
| EP3789984A1 (en) | System for optimising transient kerbside access | |
| JP2014020936A (en) | Vehicle information providing system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20180305 |