JP2019089201A - Teaching data creation device, method for controlling teaching data creation device, and robot system - Google Patents
Teaching data creation device, method for controlling teaching data creation device, and robot system Download PDFInfo
- Publication number
- JP2019089201A JP2019089201A JP2019044691A JP2019044691A JP2019089201A JP 2019089201 A JP2019089201 A JP 2019089201A JP 2019044691 A JP2019044691 A JP 2019044691A JP 2019044691 A JP2019044691 A JP 2019044691A JP 2019089201 A JP2019089201 A JP 2019089201A
- Authority
- JP
- Japan
- Prior art keywords
- robot
- teaching data
- dimensional model
- path
- virtual
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims description 72
- 230000002093 peripheral effect Effects 0.000 claims abstract description 22
- 238000012937 correction Methods 0.000 claims description 55
- 238000005259 measurement Methods 0.000 claims description 24
- 230000000007 visual effect Effects 0.000 claims description 4
- 238000003860 storage Methods 0.000 claims description 3
- 230000008569 process Effects 0.000 description 36
- 239000012636 effector Substances 0.000 description 19
- 238000012545 processing Methods 0.000 description 15
- 238000010276 construction Methods 0.000 description 11
- 230000007246 mechanism Effects 0.000 description 6
- 230000008859 change Effects 0.000 description 5
- 238000004088 simulation Methods 0.000 description 5
- 238000010586 diagram Methods 0.000 description 4
- 238000005516 engineering process Methods 0.000 description 4
- 230000006870 function Effects 0.000 description 4
- 238000004891 communication Methods 0.000 description 3
- 238000004519 manufacturing process Methods 0.000 description 2
- 206010034719 Personality change Diseases 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 230000008676 import Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
- 238000010845 search algorithm Methods 0.000 description 1
- 238000001228 spectrum Methods 0.000 description 1
Images

























Landscapes
- Numerical Control (AREA)
- Manipulator (AREA)
Abstract
Description
本発明は、オフラインでロボットの動作を教示する教示データ作成装置、教示データ作成装置の制御方法及びロボットシステムに関する。 The present invention relates to a teaching data creation device that teaches the operation of a robot off-line, a control method of the teaching data creation device, and a robot system.
オフライン教示装置は、仮想空間上に、ロボットと当該ロボットの周辺構造物とで構成される仮想ロボットシステムを構築し、ロボットの動作プログラムを作成してロボットの動作をオフラインで教示するものである。仮想ロボットシステムと実機ロボットシステムとの間には誤差が存在するのが通例であり、オフライン教示装置で作成したロボットの動作プログラムを実機ロボットシステムに供給した場合に、ロボットと周辺構造物との間で干渉等が発生するおそれがある。 The off-line teaching device constructs a virtual robot system configured of a robot and a peripheral structure of the robot in a virtual space, creates an operation program of the robot, and teaches the operation of the robot off-line. There is usually an error between the virtual robot system and the real robot system, and when the robot operation program created by the off-line teaching device is supplied to the real robot system, between the robot and the surrounding structure Interference etc. may occur.
そこで、当該誤差を考慮したオフライン教示装置として、特許文献1に記載の技術がある。この技術は、2次元視覚センサや3次元視覚センサ、距離センサ等を使用して実機ロボットシステムの構成物の配置位置を計測することで、仮想ロボットシステムとの配置位置の誤差を検出し、当該誤差分だけ教示点座標をシフトしてロボットと周辺構造物との干渉を回避するものである。 Then, there exists a technique of patent document 1 as an off-line teaching device which considered the said difference | error. This technology detects an error in the placement position relative to the virtual robot system by measuring the placement position of the components of the actual robot system using a two-dimensional vision sensor, a three-dimensional vision sensor, a distance sensor, etc. The teaching point coordinates are shifted by the error to avoid the interference between the robot and the surrounding structure.
ところで、オフライン教示装置では、ロボットや周辺構造物の3次元モデルを用意し、それらを仮想空間上に配置して仮想ロボットシステムを構築する。そして、これら3次元モデルを用いて、ロボットの動作や教示点座標を設定して教示作業を行う。
仮想ロボットシステムの構築に際し、ロボットに関しては、ロボットメーカーが用意した3次元モデルを使用することができるが、周辺構造物に関しては3次元モデルが用意されていない場合が多い。この場合、周辺構造物の3次元モデルは、外形寸法をほぼ同じにした簡易形状モデルで代用する。このように、仮想ロボットシステムと実機ロボットシステムとでは、構造物のモデル形状に差異が生じる場合がある。
By the way, in the off-line teaching device, a three-dimensional model of a robot or a peripheral structure is prepared and arranged in a virtual space to construct a virtual robot system. Then, using these three-dimensional models, the operation of the robot and the coordinates of the teaching point are set to perform teaching work.
When constructing a virtual robot system, a three-dimensional model prepared by a robot manufacturer can be used as a robot, but a three-dimensional model is often not prepared as a peripheral structure. In this case, a three-dimensional model of the peripheral structure is substituted by a simplified shape model whose external dimensions are substantially the same. Thus, in the virtual robot system and the real machine robot system, a difference may occur in the model shape of the structure.
しかしながら、上記特許文献1に記載の技術では、仮想ロボットシステムと実機ロボットシステムとの配置位置の誤差分を補正するだけであり、構造物のモデル形状の誤差分を補正することはできない。
そのため、上記特許文献1に記載の技術では、モデル形状の差異により、実機ロボットシステムにおいてロボットと構成物との干渉が発生してしまうおそれがある。また、モデル形状に差異がある場合、作業点までの最短経路が変更される場合があるが、上記特許文献1に記載の技術のように配置位置に関する誤差分の教示点座標シフトでは、ロボットの移動経路を最短経路にするような補正は行えない。
そこで、本発明は、仮想ロボットシステムの構成物と実機ロボットシステムの構成物とで形状の差異が発生している場合でも、適切なオフライン教示データを作成することを目的とする。
However, the technology described in the above-mentioned Patent Document 1 only corrects an error in the arrangement position of the virtual robot system and the real machine robot system, and can not correct the error in the model shape of the structure.
Therefore, in the technology described in Patent Document 1 described above, there is a possibility that interference between the robot and the component may occur in the actual robot system due to the difference in the model shape. Also, if there is a difference in the model shape, the shortest path to the working point may be changed, but the teaching point coordinate shift for the error related to the arrangement position as in the technology described in Patent Document 1 No correction can be made to make the moving path the shortest path.
Therefore, it is an object of the present invention to create appropriate off-line teaching data even when there is a difference in shape between a virtual robot system component and an actual robot system component.
上記課題を解決するために、本発明に係る教示データ作成装置の一態様は、実機のロボットの周辺構造物の形状を示す実測3次元モデルを取得する取得手段と、取得された前記実測3次元モデルにおいて、ロボットの移動経路を示す教示データによる前記ロボットの移動経路がより短くできるか、または前記教示データによる前記ロボットの移動により前記周辺構造物との干渉が生じる場合に、前記教示データを補正する補正手段とを有する。 In order to solve the above-mentioned subject, one mode of the teaching data creation device concerning the present invention is an acquisition means which acquires a measurement three-dimensional model which shows shape of a peripheral structure of a robot of a real machine, and the acquired said measurement 3D In the model, if the movement path of the robot can be shortened by teaching data indicating the movement path of the robot, or if the movement of the robot by the teaching data causes interference with the peripheral structure, the teaching data is corrected And correction means for
本発明によれば、仮想ロボットシステムの構成物と実機ロボットシステムの構成物とで形状の差異が発生している場合でも、適切なオフライン教示データを作成することができる。 According to the present invention, it is possible to create appropriate off-line teaching data even when there is a difference in shape between a virtual robot system component and a real robot system component.
以下、添付図面を参照して、本発明を実施するための形態について詳細に説明する。
なお、以下に説明する実施の形態は、本発明の実現手段としての一例であり、本発明が適用される装置の構成や各種条件によって適宜修正又は変更されるべきものであり、本発明は以下の実施の形態に限定されるものではない。
(第一の実施形態)
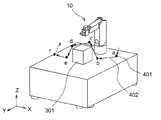
図1は、本実施形態におけるオフライン教示装置を備えるロボットシステム100の構成例を示す図である。
ロボットシステム100は、ロボット10と、オフライン教示装置20と、を備える。
ロボット10は、例えば多関節ロボットであり、アームの先端部(手先部)には、センサ部11が取り付けられている。センサ部11は、ロボット10の手先部付近にある物体を計測し、その計測結果をオフライン教示装置20に出力する。ここで、センサ部11は、例えば、視覚センサや距離センサにより構成することができる。
Hereinafter, embodiments of the present invention will be described in detail with reference to the accompanying drawings.
The embodiment described below is an example as a realization means of the present invention, and it should be appropriately corrected or changed according to the configuration of the apparatus to which the present invention is applied and various conditions. It is not limited to the embodiment of the invention.
(First embodiment)
FIG. 1 is a view showing a configuration example of a
The
The
なお、センサ部11は、ロボット10に搭載されている必要はなく、例えば、他の作業機械に搭載してもよいし、所定の撮影対象空間の上空に固定配置してもよい。
また、ロボット10は、ロボット10の手先部の位置姿勢を変更可能な位置姿勢変更機構12を備える。位置姿勢変更機構12は、ロボット10の各関節の角度を変更することで当該ロボット10の手先部の位置や姿勢を変更する。ここで、位置姿勢変更機構12は、電動モータによって駆動されてもよいし、油圧や空気圧等の流体圧で作動するアクチュエータによって駆動されてもよい。この位置姿勢変更機構12は、オフライン教示装置20によって作成されるロボット10の移動経路等を示す教示データをもとに駆動される。
The
The
さらに、ロボット10の手先部には、エンドエフェクタ13が取り付けられている。エンドエフェクタ13は、ロボット10のワークの種類に応じた作業を実現するためのツールであり、例えばロボットハンド等である。当該ロボットハンドとしては、モータ駆動可能なチャック機構を有し物体を把持可能なハンドや、空気圧で物体を吸着する吸着パッドを用いたハンド等を用いることができる。なお、エンドエフェクタ13は、アームに対して着脱可能に取り付けられており、ワークの種類に応じて交換可能である。
なお、ロボット10は、多関節ロボットに限定されるものではなく、数値制御(Numerical Control:NC)可能な可動式の機械であってもよい。
Furthermore, an
The
オフライン教示装置20は、仮想空間上でロボット用の教示データ(例えば、ロボットの移動経路)を作成し、これを実機ロボットに供給するオフライン教示(オフラインティーチング)を行う。具体的には、オフライン教示装置20は、仮想空間上に、仮想ロボット、当該仮想ロボットに取り付けられるツール(エンドエフェクタ)、作業対象物であるワーク、及び周辺構造物等の3次元モデルを配置して仮想ロボットシステムを構築し、当該仮想ロボットシステムで教示データを作成する事前検討処理を実行する。
また、オフライン教示装置20は、事前検討処理により作成された教示データを、実機ロボットシステム構築後に取得した構成要素の3次元モデルの形状に応じて補正する経路補正処理を実行する。
The off-
Further, the off-
以下、オフライン教示装置20を構成する各部について詳細に説明する。
オフライン教示装置20は、例えばパーソナルコンピュータ(PC)により構成されており、図1に示すように、システム構築部201と、ロボット経路作成部202と、動作確認部203と、計測・モデル作成部204と、形状差異判定部205と、経路補正部206と、外部IF部207と、入出力制御部208と、を備える。
システム構築部201は、仮想空間上に仮想ロボットシステムを構築する。
ロボット経路作成部202は、システム構築部201で構築した仮想ロボットシステムで、教示データとしてロボットの移動経路を作成する。
動作確認部203は、ロボット経路作成部202で作成したロボット経路をアニメーシ ョンでシミュレーションする。
Hereafter, each part which comprises the off-
The off-
The
The robot
The
また、計測・モデル作成部204は、実機ロボットシステムの構成要素の形状を示す情報を、センサ部11を制御して計測し、計測した構成要素の3次元モデル(実測3次元モデル)を作成する。
形状差異判定部205は、計測・モデル作成部204で作成された実測3次元モデルと、それに対応する仮想空間上に存在する既存3次元モデル(仮想3次元モデル)とに形状の差異があるか否かを判定し、既存3次元モデルの形状誤差に関する情報を取得する。そして、形状差異判定部205は、上記差異があると判定したとき、当該差異が事前検討処理で作成されたロボットの経路に影響を与えるか、即ち事前検討処理で作成されたロボットの経路を補正する必要があるか否かを判断する。
In addition, the measurement /
The shape
経路補正部206は、形状差異判定部205による判定結果に応じて、事前検討処理で作成されたロボットの経路を補正する。ここでは、形状差異判定部205で、形状の差異がロボット経路に影響を与える(ロボット経路を補正する必要がある)と判断したとき、ロボットの経路を補正する。
外部IF部207は、ロボット経路作成部202や経路補正部206で作成された教示データをロボット10に転送する。また、外部IF部207は、センサ部11の計測結果を受信し、これを計測・モデル作成部204へ送信する。
入出力制御部208は、ユーザがキーボードやマウス等のポインティングデバイスを用いてモニタ画面を介して行う操作を入力したり、ロボットのシミュレーション結果をモニタ画面に表示したりする。
The
The external IF
The input /
(オフライン教示装置20のハードウェア構成)
図2は、オフライン教示装置20のハードウェア構成の一例である。
オフライン教示装置20は、CPU21と、ROM22と、RAM23と、外部メモリ24と、入力部25と、表示部26と、通信I/F27と、システムバス28とを備える。
CPU21は、オフライン教示装置20における動作を統括的に制御するものであり、システムバス28を介して、各構成部(22〜27)を制御する。
ROM22は、CPU21が処理を実行するために必要な制御プログラム等を記憶する不揮発性メモリである。なお、当該プログラムは、外部メモリ24や着脱可能な記憶媒体(不図示)に記憶されていてもよい。
RAM23は、CPU21の主メモリ、ワークエリア等として機能する。すなわち、CPU21は、処理の実行に際してROM22から必要なプログラム等をRAM23にロードし、当該プログラム等を実行することで各種の機能動作を実現する。
(Hardware configuration of offline teaching device 20)
FIG. 2 is an example of a hardware configuration of the off-
The off-
The
The
The
外部メモリ24は、例えば、CPU21がプログラムを用いた処理を行う際に必要な各種データや各種情報等を記憶している。また、外部メモリ24には、例えば、CPU21がプログラム等を用いた処理を行うことにより得られた各種データや各種情報等が記憶される。
入力部25は、例えばキーボードやマウス等により構成され、オペレータが入力部25を介して当該オフライン教示装置20に指示を与えることができるようになっている。
表示部26は、液晶ディスプレイ(LCD)等のモニタで構成される。
通信I/F27は、外部装置と通信するためのインターフェースである。
システムバス28は、CPU21、ROM22、RAM23、外部メモリ24、入力部25、表示部26及び通信I/F27を通信可能に接続する。
The
The
The
The communication I /
The
オフライン教示装置20の各部の機能は、CPU21がROM22もしくは外部メモリ24に記憶されたプログラムを実行することで実現される。以下、オフライン教示装置20が実行する処理について具体的に説明する。
(事前検討処理)
図3は、オフライン教示装置20が実行する事前検討処理手順を示すフローチャートである。この事前検討処理は、実機ロボットシステムの構築前に、仮想空間上でシミュレーションによる事前検討を行うための処理である。
先ずステップS1で、オフライン教示装置20は、仮想空間上に仮想ロボットシステムを構築する。仮想ロボットシステムは、上記のシステム構築部201が構築する。
システム構築部201は、ロボットシステムを構成する各構成要素の3次元モデルをインポートし、当該3次元モデルを仮想空間上に配置することで仮想ロボットシステムを構築する。このとき、図4に示すように、外部のCAD装置210に3次元モデルが用意されている構成物については、CAD装置210から3次元モデルをインポートし、CAD装置210に3次元モデルが用意されていない構成物についてはユーザが画面上で作成した簡易的な3次元モデルを、入出力制御部208を介してインポートする。なお、CAD装置210は、オフライン教示装置20に搭載されていてもよい。
The function of each part of the off-
(Preliminary processing)
FIG. 3 is a flowchart showing the preliminary examination process procedure executed by the off-
First, in step S1, the off-
The
システム構築部201は、3次元モデルをインポートする際、画面構成要素データ211をメモリ等に保存する。画面構成要素データ211は、図5に示す各フィールドで構成されている。すなわち、各構成要素には、3次元モデルの名称211a、3次元モデルが配置されている座標211b、3次元モデルの形状に関する情報211c、3次元モデルの参照先CAD211d、形状補正実施フラグ211eがそれぞれ対応付けられている。
When importing a three-dimensional model, the
ここで、CAD装置210に3次元モデルが存在せず、ユーザが作成した3次元モデルをインポートした場合は、参照先CAD211dのフィールドには何も記述されない。また、形状補正実施フラグ211eは、実機との形状の差異が発生しているおそれがあるか否かを示すフラグであり、モデル形状の信頼度を示す属性情報に相当する。形状補正実施フラグ211eのフィールドには、例えば、CAD装置210に3次元モデルが存在せず、ユーザが簡易形状モデルを作成してインポートした構成物は、実機ロボットシステムとの形状差異が発生しているおそれがあることを示すフラグが記述される。この形状補正実施フラグ211eは、後述する経路補正処理において、経路補正が必要であるか否かの判断に用いる。
図3に戻って、ステップS2では、オフライン教示装置20は、上記のステップS1で仮想ロボットシステムを構築した後、ロボットの教示点や当該教示点間を直線補間して得られるロボットの移動経路を作成する。ここでは、作業タクトが短くなり、且つロボットの経路が周辺機器と干渉しないように教示点やロボットの経路を作成する。
Here, when a three-dimensional model does not exist in the
Returning to FIG. 3, in step S2, after the off-
次にステップS3では、上記のステップS2で作成した教示点及び経路をもとに仮想空間上でシミュレーションを行う。
図6は、シミュレーション結果によって得られたロボット経路の一例を図示したものである。点401は教示点であり、ロボット経路402は教示点a→b→c→d→e→fの順に、各教示点を結んだ線である。このように、教示点401及びロボット経路402は、周辺機器301と干渉しないように作成される。
なお、図3において、ステップS1の処理は上述したようにシステム構築部201が実行する処理であり、ステップS2の処理はロボット経路作成部202が実行する処理であり、ステップS3の処理は動作確認部203が実行する処理である。
Next, in step S3, simulation is performed on the virtual space based on the teaching points and the path created in step S2.
FIG. 6 illustrates an example of a robot path obtained by the simulation result. A
In FIG. 3, the process of step S1 is the process executed by the
(経路補正処理)
次に、オフライン教示装置20が実行する経路補正処理について具体的に説明する。
図7は、経路補正処理手順を示すフローチャートである。この経路補正処理は、上述した事前検討処理で作成されたロボット経路を必要に応じて補正するための処理であり、当該事前検討処理を実行した後、実機ロボットシステムが構築されてから実行する。
先ずステップS11で、オフライン教示装置20は、センサ部11により実機ロボットシステムの構成要素を計測する。ここで、計測対象となる構成要素は、仮想ロボットシステムを構築する際に作成された画面構成要素データ211をもとに決定する。
(Path correction processing)
Next, the path correction process performed by the off-
FIG. 7 is a flowchart showing the path correction processing procedure. The path correction process is a process for correcting the robot path created in the above-described preliminary examination process as necessary, and is executed after the actual robot system is built after the preliminary examination process is performed.
First, in step S11, the off-
はじめに、図5に示す画面構成要素データ211の形状補正実施フラグ211eのフィールドを参照し、実機ロボットシステムとの形状差異が発生するおそれのある構成要素を判別する。次に、図5に示す画面構成要素データ211の配置211bのフィールドを参照し、上記形状差異が発生するおそれのある構成要素の仮想空間上における配置位置を取得する。これにより、実機ロボットシステムでセンサ計測する構成要素が決定される。
First, referring to the field of the shape
構成要素をセンサ部11で計測する場合、計測対象の構成要素を複数方向から3次元モデルの作成が可能となるだけ計測する。計測する方向は、例えば、図8に示すように、X方向(構成物310の幅方向)、Y方向(構成物310の奥行き方向)、Z方向(構成物310の高さ方向)のいずれかから、当該構成要素の形状211cのフィールド情報をもとに決定する。
このように、計測対象となる構成要素が決定したら、オフライン教示装置20は、外部IF部207を介してセンサ部11に対して計測指令を出力し、センサ部11による計測結果を取得する。そして、取得した計測結果をもとに、構成要素の3次元モデル(実測3次元モデル)を作成し、ステップS12に移行する。
In the case where the component is measured by the
Thus, when the component to be measured is determined, the off-
ステップS12で、オフライン教示装置20は、ステップS11で作成した実測3次元モデルと、この実測3次元モデルに対応する仮想空間上の既存の3次元モデルとを比較する。既存3次元モデルが、図9(a)の3次元モデル301のように、実際の構成要素と外径寸法を等しくした簡易形状モデルである場合、実測3次元モデルは、図9(b)〜(d)の3次元モデル311〜313のように、既存3次元モデル301と外径寸法はほぼ等しいが、既存3次元モデル301とは形状が異なる場合がある。
そこで、例えば図10(a)及び(b)に示すように、既存3次元モデル301と実測3次元モデル311とを、それぞれボクセルで表現し、両者の形状を比較する。この場合、ボクセル化した形状のフーリエスペクトルを抽出する方法等を用いて既存3次元モデル301と実測3次元モデル311との形状の差異を確認する。
In step S12, the off-
Therefore, for example, as shown in FIGS. 10A and 10B, the existing three-
次にステップS13で、オフライン教示装置20は、ステップS12で形状の差異があると判定された構成要素の情報をもとに、当該形状の差異が事前検討処理で作成したロボット経路に影響を与えるか否かを判定する。ここでは、形状の差異により、事前検討処理で作成したロボット経路をより作業タクトの短い最短経路へ補正できる場合に、形状の差異がロボット経路に影響を与えると判断する。また、事前検討処理で作成したロボット経路では実機の構成要素との間で干渉が生じるため、当該ロボット経路を、干渉を回避する経路へ補正する必要がある場合にも、形状の差異がロボット経路に影響を与えると判断する。
Next, in step S13, the off-
先ず、最短経路への補正が可能か否かを判断する方法について説明する。
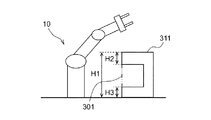
この場合、図11に示すように、ロボット10と実機の構成物の3次元モデル310とをX方向両側から俯瞰する。そして、このときの既存3次元モデルのロボット10と正対する面の高さ方向(Z方向)のサイズと、実測3次元モデルのロボット10と正対する面の高さ方向(Z方向)のサイズと、ロボット10のエンドエフェクタ13の高さ方向(Z方向)及び奥行き方向(Y方向)のサイズとに着目する。
例えば、実測3次元モデルが図9(b)に示す3次元モデル311であった場合、図12に示すように、既存3次元モデル301についてはサイズH1に着目する。また、実測3次元モデル311については、サイズH2及びH3に着目する。
First, a method of determining whether or not correction to the shortest path is possible will be described.
In this case, as shown in FIG. 11, the
For example, when the measured three-dimensional model is the three-
また、実測3次元モデルが図9(c)に示す3次元モデル312であった場合には、図13に示すように、既存3次元モデル301については図12と同様にサイズH1に着目する。また、実測3次元モデル312については、サイズH4に着目する。
同様に、実測3次元モデルが図9(d)に示す3次元モデル313であった場合には、図14に示すように、既存3次元モデル301についてはサイズH1に着目する。また、実測3次元モデル313については、サイズH5(=H1)に着目する。
When the measured three-dimensional model is the three-
Similarly, when the measured three-dimensional model is the three-
そして、上記の着目サイズをもとに、既存3次元モデルと実測3次元モデルとの形状の差異が、事前検討処理で作成したロボット経路に影響を与えるか否かを判断する。
本実施形態では、ロボット10のエンドエフェクタ13が、図15に示すように、高さH、幅W、奥行きDの形状を有する場合、既存3次元モデルのロボット10と正対する面における高さ方向のサイズから、実測3次元モデルのロボット10と正対する面における高さ方向のサイズの合計を差し引いた値が、エンドエフェクタ13の高さHまたは幅Wのサイズよりも大きいとき、ロボット経路に影響を与えると判断する。
例えば図12に示す例の場合、H1−(H2+H3)>H、またはH1−(H2+H3)>Dのとき、図16に示すように、ロボット10のエンドエフェクタ13が既存3次元モデル301との差異部である繰り抜き部分を通過できる可能性がある。そのため、最短経路が新たに見つかる可能性があると判断し、この場合には、既存のロボット経路に影響があると判断する。
Then, based on the above noted size, it is determined whether the difference in shape between the existing three-dimensional model and the measured three-dimensional model affects the robot route created in the preliminary examination process.
In the present embodiment, when the
For example, in the case of the example shown in FIG. 12, when H1- (H2 + H3)> H or H1- (H2 + H3)> D, as shown in FIG. 16, the
また、例えば図13に示す例の場合にも、H1−H4>H、またはH1−H4>Dのとき、図17に示すように、ロボット10のエンドエフェクタ13が既存3次元モデル301との差異部である繰り抜き部分を通過できる可能性がある。したがって、この場合にも、既存のロボット経路に影響がある(最短経路に補正することができる)と判断する。
これに対して、例えば図14に示す例の場合には、H1−H5=0であり、上記の条件を満足することはないため、既存のロボット経路には影響がない(最短経路に補正することはできない)と判断する。
以上により、最短経路への補正が可能か否かを判断することができる。この判断は、図11のX方向両側について行う。
For example, also in the case of the example shown in FIG. 13, when H1-H4> H or H1-H4> D, as shown in FIG. 17, the
On the other hand, in the case of the example shown in FIG. 14, for example, H1-H5 = 0, and the above conditions are not satisfied, so the existing robot route is not affected (corrected to the shortest route) Can not do).
From the above, it can be determined whether or not the correction to the shortest path is possible. This determination is made on both sides in the X direction of FIG.
次に、干渉回避経路への補正が必要か否かを判断する方法について説明する。
図18は、事前検討処理で作成されたロボット経路の一例を示す図である。このロボット経路403は、仮想空間上の既存3次元モデル301の近傍を、ロボット10が教示点a→b→c→d→e→fと通過する経路である。
干渉回避経路への補正が必要か否かは、図19に示すように、図18における既存3次元モデル301を、実測3次元モデル314に入れ替え、既存ロボット経路403と実測3次元モデル314との位置関係をもとに判断する。
Next, a method of determining whether a correction to the interference avoidance path is necessary will be described.
FIG. 18 is a diagram showing an example of a robot path created in the preliminary examination process. The
As shown in FIG. 19, the existing three-
図19に示す例の場合、形状の差異により、教示点b→c→dを通過する経路で干渉が発生することがわかる。すなわち、教示点b→c→dを通過する経路は、干渉回避経路への補正が必要な経路である。
このように、干渉回避経路への補正が可能か否かを判断することができる。
そして、オフライン教示装置20は、図7のステップS13で形状差異が既存ロボット経路に影響を与えると判断した場合には、ロボット経路を補正すると判断してステップS14に移行し、既存ロボット経路に影響を与えないと判断した場合には、ロボット経路を補正しないと判断して後述するステップS16に移行する。
ステップS14では、オフライン教示装置20は、ロボット経路を補正する。ここでは、オフライン教示装置20は、事前検討処理で作成したロボット経路を、補正が必要な経路だけ部分的に補正する。
In the case of the example shown in FIG. 19, it can be understood that interference occurs in the path passing the teaching point b → c → d due to the difference in shape. That is, the path passing through the teaching point b → c → d is a path that requires correction to the interference avoidance path.
In this way, it can be determined whether correction to the interference avoidance path is possible.
If the off-
In step S14, the off-
先ず、最短経路への補正方法について説明する。
図20は、事前検討処理で作成されたロボット経路の一例を示す図である。ロボット経路403は、仮想空間上の既存3次元モデル301の近傍を、ロボット10が教示点a→b→c→d→e→fと通過する経路である。また、ロボット経路404は、仮想空間上の既存3次元モデル301の近傍を、ロボット10が教示点x→y→zと通過する経路である。
最短経路を探索する際には、先ず、図21に示すように、図20における既存3次元モデル301を実測3次元モデル311と入れ替える。
First, the method of correction to the shortest path will be described.
FIG. 20 is a diagram showing an example of a robot path created in the preliminary examination process. The
When searching for the shortest path, first, as shown in FIG. 21, the existing three-
次に、実測3次元モデル311から一定距離にある近傍領域501を設定し、近傍領域501内にある教示点をサーチする。図21に示す例では、教示点b、c、d、e及びyがこれにあたる。なお、ここでは、近傍領域501を直方体状の空間としているが、近傍領域501は実測3次元モデルの近傍の領域を規定できればよく、例えば球体状等であってもよい。
さらに、近傍領域501外から、近傍領域501内の教示点に向かう経路(すなわち、近傍領域501外から近傍領域501内に入ってくる経路)をサーチする。図21に示す例では、a→bの経路411と、x→yの経路412がこれにあたる。
同様に、近傍領域501内から近傍領域501外に向かう経路をサーチする。図21に示す例では、e→fの経路413と、y→zの経路414がこれにあたる。
Next, a
Further, a route from the outside of the
Similarly, a path from inside the
次に、近傍領域501外から近傍領域501内に入ってくる経路(図21では経路411と経路412)の終点と、近傍領域501内から近傍領域501外へ出る経路(図21では経路413と経路414)の始点が同一座標でない教示点をサーチする。図21に示す例では、教示点bと教示点eとがこれにあたる。
なお、図21において、教示点x→y→zの経路は、教示点yが始点と終点の両方の要素を持ち、一瞬、エンドエフェクタ13が近傍領域501内に進入するだけで、3次元モデル311の繰り抜き部分をエンドエフェクタが通過することと無関係であることが判断できる。
したがって、教示点bを始点、教示点eを終点として、最短経路探索をすればよいことが分かる。
Next, the end point of the route (
In FIG. 21, in the path of teaching point x → y → z, the teaching point y has elements of both the start point and the end point, and the three-dimensional model is obtained only by the
Therefore, it is understood that the shortest path search may be performed with the teaching point b as the start point and the teaching point e as the end point.
最短経路探索には、例えば探索木法を用いる。
図22は、グラフ探索法による経路探索方法を説明するための図である。
この図22に示すように、空間600内において、出発点601から目標点602までの最短経路を探索する場合について考える。ここで、空間600内には、障害物、即ち通過することができない領域603が存在するものとする。なお、ここでは説明のために2次元空間で表現しているが、3次元空間でも同様である。
For example, a search tree method is used for the shortest path search.
FIG. 22 is a diagram for explaining a path search method by the graph search method.
As shown in FIG. 22, the case of searching for the shortest path from the
先ず、図22に示すように、空間600をメッシュ化する。
次に、図23に示すように、出発点601と目標点602とから、それぞれ隣接するメッシュに向かって進むことを考える。このとき、隣接するメッシュに障害物603が存在する場合には進まないようにする。例えば、図23の出発点601の場合、A〜Hの8方向のうち、CとDの方向には障害物603が存在するため、進まないようにする。一方、目標点602からは、隣接するメッシュ内にはいずれも障害物603が存在しないため、A〜Hの全方向に進むことができる。
First, as shown in FIG. 22, the
Next, as shown in FIG. 23, it is considered to move from the
そして、図24に示すように、進んだ先のメッシュ(例えば、メッシュ604や605)でも同様に障害物の存在しない隣接メッシュに進むようにする。これを出発点601と目標点602の双方で繰り返し、最も早く双方から進んで同じメッシュに入った経路が求める最短経路である。この例では、図25に示すように、経路610が最短経路となる。
図21における教示点bを始点、教示点eを終点として、上記の方法により探索した最短経路は、図26の経路415のようになる。このようにして、既存ロボット経路を最短経路へ補正することができる。
Then, as shown in FIG. 24, the mesh is advanced to the adjacent mesh where there is no obstacle in the same way as the mesh that is advanced (for example, the
With the teaching point b in FIG. 21 as the start point and the teaching point e as the end point, the shortest path searched by the above method is as shown by the
このように、経路探索アルゴリズムに上記の方法を用いるので、近傍領域501を広くとれば、長い距離の経路補正が可能となり補正経路を滑らかにすることができる。しかしながら、この場合、処理の時間が長くなることは容易に類推することができるので、処理時間を優先するか、経路の滑らかさを優先するかに応じて近傍領域501を設定してもよい。
なお、ここではグラフ探索法を用いて最短経路を求める場合について説明したが、他のアルゴリズム(RRTやPRM等のサンプリングベース探索法等)を用いてもよい。
As described above, since the above method is used for the path search algorithm, if the
In addition, although the case where a shortest path was calculated | required using a graph search method was demonstrated here, you may use another algorithm (sampling base search methods, such as RRT and PRM, etc.).
次に、干渉回避経路への補正方法について説明する。
先ず、干渉回避経路の始点と終点とをサーチする。上述した図19に示す例の場合、教示点b→c→dを通過する経路が、干渉回避経路への補正が必要な経路である。したがって、この場合、教示点bを始点、教示点dを終点として干渉回避経路の探索を行う。
干渉回避の経路探索は、上記の最短経路探索と同じ方法で行う。
これにより、図27に示すように、教示点bを出発点、教示点dを目標点とし、実測3次元モデル314との干渉が回避された補正経路416が求められる。この補正経路416は、例えば、経路探索で新たに設定された教示点g及びhを通過する。
以上のように、最短経路を通過、または干渉を回避するよう経路を補正した後は、オフライン教示装置20は、図7のステップS15に移行して、仮想ロボットシステムを更新する。すなわち、オフライン教示装置20は、仮想空間上の3次元モデルを、実測3次元モデルに交換して仮想空間上のロボットシステムを更新する。
Next, the correction method to the interference avoidance path will be described.
First, the start point and the end point of the interference avoidance path are searched. In the case of the example shown in FIG. 19 described above, the path passing through the teaching point b → c → d is a path that requires correction to the interference avoidance path. Therefore, in this case, a search for an interference avoidance path is performed with the teaching point b as the start point and the teaching point d as the end point.
The path search for interference avoidance is performed in the same manner as the shortest path search described above.
As a result, as shown in FIG. 27, with the teaching point b as the departure point and the teaching point d as the target point, a corrected
As described above, after correcting the path through the shortest path or avoiding the interference, the off-
次に、ステップS16では、オフライン教示装置20は、補正後のロボット経路データを実機ロボットシステムに転送する。これにより、実機ロボットシステムによる動作確認が行われる。
以上のように、本実施形態では、事前検討のために仮想空間上の仮想ロボットシステムで教示されたロボットの移動経路を、仮想ロボットシステムを構成する仮想3次元モデルの形状誤差に応じて補正する。
仮想ロボットシステムと実機ロボットシステムとで、ロボットシステムの構成物の形状に差異がある場合、仮想ロボットシステム上で作成した動作プログラムでそのままロボットを動作させると、実機ロボットシステムにおいてロボットと周辺機器との干渉が発生したり、所望の作業タクトを実現することができなかったりする場合がある。
Next, in step S16, the off-
As described above, in the present embodiment, the movement path of the robot taught by the virtual robot system in the virtual space is corrected according to the shape error of the virtual three-dimensional model constituting the virtual robot system in advance for examination. .
If there is a difference in the shape of the components of the robot system between the virtual robot system and the real robot system, if the robot is operated as it is with the operation program created on the virtual robot system, the robot and peripheral devices in the real robot system Interference may occur or a desired work tact may not be realized.
そのため、従来のオフライン教示装置では、作成した動作プログラムを実機ロボットシステムに転送し、実機ロボットシステムにて調整作業を行い、動作プログラムの修正を行う。更に、実機ロボットシステムにて修正された動作プログラムをオフライン教示装置に戻すと、オフライン教示装置上でのシミュレーションでロボットと周辺機器とで干渉等が発生してしまうため、実機ロボットシステムと同じになるように仮想空間上のロボットシステムを再構築して再教示作業を行う。 Therefore, in the conventional off-line teaching device, the created operation program is transferred to the real machine robot system, adjustment work is performed by the real machine robot system, and the movement program is corrected. Furthermore, if the operation program corrected by the actual robot system is returned to the off-line teaching device, the robot and peripheral devices will generate interference etc. in the simulation on the off-line teaching device, so it will be the same as the actual robot system. In this way, the robot system in the virtual space is rebuilt and the re-teaching operation is performed.
これに対して、本実施形態では、仮想3次元モデルの形状誤差が発生している場合には、仮想ロボットシステム上で作成した動作プログラムを自動的に補正してから実機ロボットシステムに転送する。したがって、実機ロボットシステムを用いた現場調整や再教示作業の必要がない。このように、仮想空間上と実機ロボットシステムとで構成物の形状差異が発生している場合であっても、適切なオフライン教示が可能となる。
また、3次元モデルの形状差異が、事前検討処理で作成したロボット経路に影響を与えるか否か、即ち当該ロボット経路の補正の必要性があるか否かを判定し、補正の必要性があると判定した場合にロボット経路を補正する。したがって、効率良く補正処理を実施することができる。
On the other hand, in the present embodiment, when a shape error of the virtual three-dimensional model occurs, the operation program created on the virtual robot system is automatically corrected and transferred to the real robot system. Therefore, there is no need for on-site adjustment or re-teaching work using a real robot system. As described above, even when there is a shape difference between components in the virtual space and the actual robot system, appropriate off-line teaching can be performed.
In addition, it is necessary to determine whether the difference in shape of the three-dimensional model affects the robot path created in the preliminary examination process, that is, whether the robot path needs to be corrected or not. If it is determined that the robot route is corrected. Therefore, the correction process can be performed efficiently.
さらに、仮想3次元モデルの形状誤差が発生しているか否かは、視覚センサや距離センサ等により実機ロボットシステムの構成物の形状を計測することで判断する。具体的には、上記センサによる計測結果に基づいて構成物の実測3次元モデルを作成し、作成した実測3次元モデルと仮想3次元モデルとを比較し、仮想3次元モデルの形状誤差を算出する。このように、実測結果をもとに形状差異を判断するので、仮想ロボットシステムと実機ロボットシステムとで、ロボットシステムの構成物の形状に差異があることを確実に把握することができる。 Furthermore, whether or not a shape error of the virtual three-dimensional model is generated is determined by measuring the shape of the component of the actual robot system using a visual sensor, a distance sensor, or the like. Specifically, based on the measurement result by the sensor, an actual measurement three-dimensional model of the component is created, the actual measurement three-dimensional model and the virtual three-dimensional model are compared, and the shape error of the virtual three-dimensional model is calculated. . As described above, since the difference in shape is determined based on the measurement result, it is possible to reliably grasp that there is a difference in the shape of the component of the robot system between the virtual robot system and the actual robot system.
また、このとき、形状誤差が発生している可能性があると判別した仮想3次元モデルに対応する実機ロボットシステム上の構成物についてのみ、上記センサによる形状計測を行う。ここで、形状誤差が発生している可能性があるか否かは、例えば、仮想3次元モデルが、ユーザが作成した簡易形状モデルであるか否かに応じて判別する。
ロボットに関しては、ロボットメーカーが用意している3次元データを使用することができるが、ロボットの周辺機器に関しては、治工具等の一品物が多く、2次元図面は存在するが3次元モデルが用意されていない場合が多い。特に、周辺機器は生産現場にて調達するため、3次元CAD装置で設計をしていない生産現場の作業者にとって、3次元モデルを新たに作成することは非常に手間のかかる作業である。そのため、周辺機器に関しては、3次元モデルとして外形寸法をほぼ同じにした簡易形状モデルを作成し、代用することが多い。このように、仮想ロボットシステムを構成する仮想3次元モデルには、モデル形状の信頼度が異なるデータが混在する。
Further, at this time, the shape measurement by the sensor is performed only on the component on the real machine robot system corresponding to the virtual three-dimensional model which is determined that there is a possibility that a shape error has occurred. Here, whether or not there is a possibility that a shape error has occurred is determined, for example, according to whether or not the virtual three-dimensional model is a simplified shape model created by the user.
For robots, three-dimensional data prepared by the robot manufacturer can be used, but for peripheral equipment of robots, there are many items such as tools, etc. There are two-dimensional drawings but three-dimensional models are prepared Often not. In particular, since peripheral devices are procured at a production site, creating a new three-dimensional model is a very time-consuming task for workers at a production site not designed with a three-dimensional CAD apparatus. Therefore, with regard to peripheral devices, a simplified shape model having almost the same external dimensions as a three-dimensional model is often created and substituted. Thus, in the virtual three-dimensional model constituting the virtual robot system, data having different model shape reliability is mixed.
本実施形態では、仮想ロボットシステムを構築する際に、各仮想3次元モデルに、当該モデルが、メーカー等が用意した信頼度の高いデータであるのか、ユーザが簡易に作成した信頼度の低いデータであるのかを示す属性情報(形状補正実施フラグ211e)を付加する。そして、その属性情報を参照して、形状誤差が発生している可能性がある仮想3次元モデルを判別する。したがって、比較的容易且つ適切に、上記センサによる形状計測が必要な構成物を判別することができる。
In the present embodiment, when constructing a virtual robot system, whether each virtual three-dimensional model has high reliability data prepared by a manufacturer or the like, or low reliability data easily generated by the user. Attribute information (shape
また、実測3次元モデルと仮想3次元モデルとの比較に際し、両者をボクセルデータで表現し、形状の差異を判断する。したがって、適切に形状比較を行うことができる。
さらに、3次元モデルの形状差異が、事前検討処理で作成したロボット経路に影響を与えるか否か、即ち当該ロボット経路の補正の必要性があるか否かは、上記ロボット経路が最短移動経路へ補正可能であるか否か、若しくは、上記ロボット経路が、干渉が発生する経路であるか否かに応じて判定する。
Further, when comparing the measured three-dimensional model and the virtual three-dimensional model, both are represented by voxel data to determine the difference in shape. Therefore, shape comparison can be performed appropriately.
Furthermore, whether the shape difference of the three-dimensional model affects the robot route created in the preliminary examination process, that is, whether the robot route needs to be corrected, the robot route is the shortest movement route. It is determined according to whether or not correction is possible, or whether the robot path is a path where interference occurs.
事前検討処理では、仮想ロボットシステム上でロボットと周辺機器との干渉が発生せず、作業タクトが最短となるようなオフライン教示を行い、動作プログラムを作成する。ところが、仮想3次元モデルの形状と実機の構成物の形状とに差異がある場合、作業点までの最短経路が変更される(より最短な経路が見つかる)場合がある。本実施形態では、3次元モデルの形状差異により、ロボット経路を最短移動経路へ補正可能であると判定すると、当該ロボット経路を最短移動経路へ補正することができる。これにより、作業点までの最短経路を適切に教示することができ、作業タクト時間の更なる短縮が図れる。 In the pre-study process, the robot and the peripheral device do not interfere with each other on the virtual robot system, and off-line teaching is performed so as to minimize the work tact, and an operation program is created. However, if there is a difference between the shape of the virtual three-dimensional model and the shape of the component of the actual machine, the shortest route to the work point may be changed (a shortest route may be found). In this embodiment, if it is determined that the robot path can be corrected to the shortest movement path by the difference in shape of the three-dimensional model, the robot path can be corrected to the shortest movement path. Thereby, the shortest path to the work point can be properly taught, and the work tact time can be further shortened.
また、このとき、仮想3次元モデルの形状と、実測3次元モデルの形状と、ロボットのエンドエフェクタの3次元モデルの形状とに基づいて、ロボット経路が最短移動経路へ補正可能であるか否かを判定する。具体的には、仮想3次元モデルのロボットに正対する面を構成する高さ方向の辺の長さから、実測3次元モデルのロボットに正対する面を構成する高さ方向の辺の長さを差し引いた長さが、エンドエフェクタの3次元モデルの上記高さ方向に相当する長さよりも長いとき、ロボット経路が最短移動経路へ補正可能であると判定する。したがって、実機ロボットシステムの構成物に繰り抜き部分があり、その大きさが、エンドエフェクタが通過可能な大きさである場合には、当該繰り抜き部分をエンドエフェクタが通過する経路が最短移動経路となると判断して、ロボット経路を補正することができる。 Also, at this time, whether or not the robot path can be corrected to the shortest movement path based on the shape of the virtual three-dimensional model, the shape of the measured three-dimensional model, and the shape of the three-dimensional model of the end effector of the robot Determine Specifically, from the length of the side in the height direction that constitutes the face of the virtual three-dimensional model facing the robot, the length of the side in the height direction that constitutes the face of the measured three-dimensional model facing the robot When the subtracted length is longer than the length corresponding to the height direction of the three-dimensional model of the end effector, it is determined that the robot path can be corrected to the shortest movement path. Therefore, when the component of the real robot system has a cutout and the size is such that the end effector can pass, the path through which the end effector passes through the cutout is the shortest movement path. It can be determined that the robot path can be corrected.
さらに、本実施形態では、3次元モデルの形状差異により、ロボット経路が、実機ロボットシステムにおいて干渉が発生する経路であると判定すると、当該ロボット経路を干渉回避経路へ補正することができる。したがって、動作プログラムを実機ロボットシステムへ転送した後の調整作業をなくすことができる。
このとき、実測3次元モデルの形状と、ロボット経路とに基づいて、ロボット経路が、干渉が発生する経路であるか否かを判定する。このように、実測3次元モデルとロボット経路との位置関係から、容易に干渉が発生するか否かを判定することができる。
また、最短移動経路や干渉回避経路へ補正する場合、事前検討処理で作成したロボット経路のうち、仮想3次元モデル近傍の補正が必要である移動経路のみを部分的に補正する。したがって、補正処理時間を短縮することができる。
Furthermore, in the present embodiment, when it is determined that the robot path is a path where interference occurs in the real robot system due to the difference in shape of the three-dimensional model, the robot path can be corrected to the interference avoidance path. Therefore, it is possible to eliminate the adjustment work after transferring the operation program to the actual robot system.
At this time, based on the shape of the measured three-dimensional model and the robot path, it is determined whether the robot path is a path where interference occurs. As described above, it is possible to easily determine whether or not interference occurs from the positional relationship between the measured three-dimensional model and the robot path.
In addition, when correcting to the shortest movement path or the interference avoidance path, among the robot paths created in the preliminary examination process, only the movement path that needs correction in the vicinity of the virtual three-dimensional model is partially corrected. Therefore, the correction processing time can be shortened.
最短移動経路へ補正する場合には、仮想空間上で、仮想3次元モデルを実測3次元モデルと入れ替え、当該実測3次元モデルから所定距離にある近傍領域を設定する。そして、近傍領域内に存在する教示点の中から、部分的に補正する移動経路の開始点と終了点とを選択し、選択した教示点間を結ぶ最短移動経路を探索する。このとき、近傍領域外の教示点から近傍領域内の教示点に向かう移動経路の終点となる教示点を開始点として選択し、近傍領域内の教示点から近傍領域外の教示点に向かう移動経路の始点となる教示点を終了点として選択する。
上記のように部分的に補正する移動経路の開始点と終了点とを選択し、経路探索を実施するので、3次元モデルの繰り抜き部分をエンドエフェクタが通過するような経路を探索することが可能となる。したがって、事前検討処理で作成したロボット経路よりも最短で作業点まで移動する経路を探索することができる。
When correcting to the shortest movement path, the virtual three-dimensional model is replaced with the actual measurement three-dimensional model in the virtual space, and a near region at a predetermined distance from the actual measurement three-dimensional model is set. Then, the start point and the end point of the movement path to be partially corrected are selected from the teaching points existing in the near region, and the shortest movement path connecting the selected teaching points is searched. At this time, a teaching point that is the end point of the movement path from the teaching point outside the near area to the teaching point inside the near area is selected as the start point, and the moving path from the teaching point within the near area toward the teaching point outside the near area Select the teaching point that is the start point of as the end point.
Since the path search is performed by selecting the start point and the end point of the movement path to be partially corrected as described above, a path where the end effector passes through the unrolled portion of the three-dimensional model may be searched It becomes possible. Therefore, it is possible to search for a path that moves to the work point at the shortest distance than the robot path created in the preliminary examination process.
また、干渉回避経路へ補正する場合には、干渉が発生している移動経路の始点となる教示点と終点となる教示点とを、それぞれ部分的に補正する移動経路の開始点と終了点として選択し、選択した教示点間を結ぶ干渉回避経路を探索する。したがって、実機ロボットシステムにおいて干渉が発生しないロボット経路を適切に教示することができる。
このように、事前検討のために仮想空間上で構成要素の3次元モデルを用いて構築されたロボットシステムモデルで教示されたロボット経路を、実機ロボットシステム構築後に計測した構成要素の3次元モデルの形状に応じて、ロボットに最短経路を通過させたり、ロボットに干渉を回避する経路を通過させたりするよう、補正が必要な部分だけ自動的に補正することができる。したがって、仮想ロボットシステムの構成物と実機ロボットシステムの構成物との形状の差異が発生している場合でも、適切なオフライン教示データを作成することができると共に、再教示の手間や時間を省くことができる。
In addition, when correcting to the collision avoidance path, the teaching point as the start point and the teaching point as the end point of the movement path in which the interference is generated are respectively set as the start point and the end point of the movement path to be partially corrected. An interference avoidance route connecting selected teaching points is searched. Therefore, it is possible to properly teach a robot path in which no interference occurs in the real robot system.
As described above, the robot path taught by the robot system model constructed using the three-dimensional model of the component in the virtual space for the preliminary examination is a three-dimensional model of the component measured after construction of the real robot system. Depending on the shape, it is possible to automatically correct only the part that needs correction so as to make the robot pass the shortest path or let the robot pass a path avoiding interference. Therefore, even when there is a difference in shape between the virtual robot system components and the real robot system components, it is possible to create appropriate off-line teaching data and save time and time for re-teaching. Can.
(変形例)
上記実施形態においては、センサ部11でロボット10の周辺構成物の形状を計測する場合について説明したが、センサ部11でロボット10のエンドエフェクタ13の形状を計測してもよい。この場合、既存3次元モデルと実測3次元モデルとの形状の差異が、事前検討処理で作成したロボット経路に影響を与えるか否かを判断する際に用いる、エンドエフェクタ13の高さHまたは幅Wの値として、実測値を用いることができる。したがって、より高精度な判断が可能となる。
(Modification)
In the above embodiment, although the case where the shape of the peripheral component of the
また、上記実施形態においては、センサ部11により実機ロボットシステム上の構成物の形状を計測し、その計測結果に基づいて作成した実測3次元モデルと既存3次元モデルとを比較することでモデル形状の差異を確認する場合について説明したが、これに限定されるものではない。例えば、既存3次元モデルの形状誤差(対応する実機ロボットシステムの構成物との形状の差異)に関する情報を外部からユーザ等により直接入力してもよい。この場合、図7のステップS11及びS12の処理が不要となる。
In the above embodiment, the shape of the component on the real machine robot system is measured by the
(その他の実施形態)
本発明は、上述の実施形態の1以上の機能を実現するプログラムを、ネットワーク又は記憶媒体を介してシステム又は装置に供給し、そのシステム又は装置のコンピュータにおける1つ以上のプロセッサーがプログラムを読出し実行する処理でも実現可能である。また、1以上の機能を実現する回路(例えば、ASIC)によっても実現可能である。
(Other embodiments)
The present invention supplies a program that implements one or more functions of the above-described embodiments to a system or apparatus via a network or storage medium, and one or more processors in a computer of the system or apparatus read and execute the program. Can also be realized. It can also be implemented by a circuit (eg, an ASIC) that implements one or more functions.
10…ロボット、11…センサ部、12…位置姿勢変更機構、13…ハンド、20…オフライン教示装置、201…システム構築部、202…ロボット経路作成部、203…動作確認部、204…計測・モデル作成部、205…形状差異判定部、206…経路補正部、207…外部IF部、208…入出力制御部
DESCRIPTION OF
Claims (15)
取得された前記実測3次元モデルにおいて、ロボットの移動経路を示す教示データによる前記ロボットの移動経路がより短くできるか、または前記教示データによる前記ロボットの移動により前記周辺構造物との干渉が生じる場合に、前記教示データを補正する補正手段とを有することを特徴とする教示データ作成装置。 Acquisition means for acquiring a measured three-dimensional model indicating the shape of a peripheral structure of a real robot;
In the acquired actual three-dimensional model, if the movement path of the robot can be made shorter according to the teaching data indicating the movement path of the robot, or if the movement of the robot due to the teaching data causes interference with the surrounding structure And a correction unit configured to correct the teaching data.
前記仮想3次元モデルに付加された属性情報に基づいて、前記取得手段により実測3次元モデルを取得することを特徴とする請求項1ないし3のいずれか1項に記載の教示データ作成装置。 The virtual three-dimensional model is a three-dimensional model to which attribute information indicating the reliability of a model shape is added,
The teaching data creation device according to any one of claims 1 to 3, wherein an actual measurement three-dimensional model is acquired by the acquisition unit based on attribute information added to the virtual three-dimensional model.
取得された前記実測3次元モデルにおいて、ロボットの移動経路を示す教示データによる前記ロボットの移動経路がより短くできるか、または前記教示データによる前記ロボットの移動により前記周辺構造物との干渉が生じる場合に、前記教示データを補正する補正工程とを有することを特徴とする教示データ作成装置の制御方法。 An acquisition step of acquiring a measured three-dimensional model indicating a shape of a peripheral structure of a real robot;
In the acquired actual three-dimensional model, if the movement path of the robot can be made shorter according to the teaching data indicating the movement path of the robot, or if the movement of the robot due to the teaching data causes interference with the surrounding structure And a correction step of correcting the teaching data.
前記仮想3次元モデルに付加された属性情報に基づいて、前記取得工程により実測3次元モデルを取得することを特徴とする請求項7ないし9のいずれか1項に記載の教示データ作成装置の制御方法。 The virtual three-dimensional model is a three-dimensional model to which attribute information indicating the reliability of a model shape is added,
The control of the teaching data creation device according to any one of claims 7 to 9, wherein an actual measurement three-dimensional model is acquired by the acquisition step based on attribute information added to the virtual three-dimensional model. Method.
補正された前記教示データに基づいて前記ロボットを動作させる制御装置と、を備えることを特徴とするロボットシステム。 A robot, and the teaching data creation device according to any one of claims 1 to 6.
A control system for operating the robot based on the corrected teaching data.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019044691A JP6825026B2 (en) | 2019-03-12 | 2019-03-12 | Information processing equipment, information processing methods and robot systems |
| JP2021004153A JP7293267B2 (en) | 2019-03-12 | 2021-01-14 | Information processing device, information processing method, and robot system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019044691A JP6825026B2 (en) | 2019-03-12 | 2019-03-12 | Information processing equipment, information processing methods and robot systems |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015019641A Division JP6497953B2 (en) | 2015-02-03 | 2015-02-03 | Offline teaching apparatus, offline teaching method, and robot system |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021004153A Division JP7293267B2 (en) | 2019-03-12 | 2021-01-14 | Information processing device, information processing method, and robot system |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019089201A true JP2019089201A (en) | 2019-06-13 |
| JP6825026B2 JP6825026B2 (en) | 2021-02-03 |
Family
ID=66835562
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019044691A Active JP6825026B2 (en) | 2019-03-12 | 2019-03-12 | Information processing equipment, information processing methods and robot systems |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6825026B2 (en) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021106307A1 (en) * | 2019-11-27 | 2021-06-03 | 株式会社日立製作所 | Control device, control method, and robot system |
| WO2022025001A1 (en) * | 2020-07-28 | 2022-02-03 | ファナック株式会社 | Teaching device, teaching system, and teaching program |
| WO2022180801A1 (en) * | 2021-02-26 | 2022-09-01 | 株式会社安川電機 | Simulation device, control system, and modeling method |
| DE112020007414B4 (en) | 2020-07-08 | 2024-08-14 | Mitsubishi Electric Corporation | ROBOT CONTROL, ROBOT CONTROL METHOD AND STORAGE MEDIUM FOR STORING A ROBOT CONTROL PROGRAM |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03113512A (en) * | 1989-09-27 | 1991-05-14 | Komatsu Ltd | Teaching method for industrial robot |
| JPH0519840A (en) * | 1991-07-12 | 1993-01-29 | Fanuc Ltd | Off-line verification system |
| JP2003114706A (en) * | 2001-10-05 | 2003-04-18 | Matsuura Tekkosho:Kk | Display system for articulated general purpose robot model |
| JP2007280251A (en) * | 2006-04-11 | 2007-10-25 | Yaskawa Electric Corp | Mobile robot |
| JP2011031309A (en) * | 2009-07-29 | 2011-02-17 | Toshiba Corp | Method of generating moving body posture and device of generating moving body posture |
-
2019
- 2019-03-12 JP JP2019044691A patent/JP6825026B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03113512A (en) * | 1989-09-27 | 1991-05-14 | Komatsu Ltd | Teaching method for industrial robot |
| JPH0519840A (en) * | 1991-07-12 | 1993-01-29 | Fanuc Ltd | Off-line verification system |
| JP2003114706A (en) * | 2001-10-05 | 2003-04-18 | Matsuura Tekkosho:Kk | Display system for articulated general purpose robot model |
| JP2007280251A (en) * | 2006-04-11 | 2007-10-25 | Yaskawa Electric Corp | Mobile robot |
| JP2011031309A (en) * | 2009-07-29 | 2011-02-17 | Toshiba Corp | Method of generating moving body posture and device of generating moving body posture |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021106307A1 (en) * | 2019-11-27 | 2021-06-03 | 株式会社日立製作所 | Control device, control method, and robot system |
| JP2021084159A (en) * | 2019-11-27 | 2021-06-03 | 株式会社日立製作所 | Control device, control method and robot system |
| CN114585482A (en) * | 2019-11-27 | 2022-06-03 | 株式会社日立制作所 | Control device, control method, and robot system |
| JP7263217B2 (en) | 2019-11-27 | 2023-04-24 | 株式会社日立製作所 | CONTROL DEVICE, CONTROL METHOD, AND ROBOT SYSTEM |
| CN114585482B (en) * | 2019-11-27 | 2023-08-11 | 株式会社日立制作所 | Control device, control method, and robot system |
| DE112020007414B4 (en) | 2020-07-08 | 2024-08-14 | Mitsubishi Electric Corporation | ROBOT CONTROL, ROBOT CONTROL METHOD AND STORAGE MEDIUM FOR STORING A ROBOT CONTROL PROGRAM |
| WO2022025001A1 (en) * | 2020-07-28 | 2022-02-03 | ファナック株式会社 | Teaching device, teaching system, and teaching program |
| JP7506160B2 (en) | 2020-07-28 | 2024-06-25 | ファナック株式会社 | Teaching device, teaching system, and teaching program |
| WO2022180801A1 (en) * | 2021-02-26 | 2022-09-01 | 株式会社安川電機 | Simulation device, control system, and modeling method |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6825026B2 (en) | 2021-02-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6497953B2 (en) | Offline teaching apparatus, offline teaching method, and robot system | |
| EP1936458B1 (en) | Device, method, program and recording medium for robot offline programming | |
| JP3732494B2 (en) | Simulation device | |
| KR101126808B1 (en) | Error estimation method and device for multi-axis controlled machines | |
| JP7293267B2 (en) | Information processing device, information processing method, and robot system | |
| JP2019089201A (en) | Teaching data creation device, method for controlling teaching data creation device, and robot system | |
| JP3950805B2 (en) | Teaching position correction device | |
| JP5670416B2 (en) | Robot system display device | |
| JP4763074B2 (en) | Measuring device and measuring method of position of tool tip of robot | |
| JP4137909B2 (en) | Robot program correction device | |
| JP2019081230A (en) | Robot teaching device warning or modifying positional deviation of teaching point or teaching line | |
| JP2007108916A (en) | Off-line teaching device for robot | |
| JP2007286976A (en) | Robot simulation apparatus | |
| JP2004094399A (en) | Control process for multi-joint manipulator and its control program as well as its control system | |
| JP2009190113A (en) | Robot simulation device | |
| JP7475841B2 (en) | Information processing method, robot system, article manufacturing method, and information processing device | |
| JP2012022546A (en) | Teaching data correction system | |
| JP2021186929A (en) | Control method for multi-axis robot | |
| JP2015089607A (en) | Tool tip point information correction program, tool tip point information correction device, and tool tip point information correction method | |
| JP2015100874A (en) | Robot system | |
| JP4794937B2 (en) | Programming device for arc welding | |
| JP2018118330A (en) | Operational equipment, operating method, operation program and robot system | |
| JP7232704B2 (en) | ROBOT PROGRAM EVALUATION DEVICE, ROBOT PROGRAM EVALUATION METHOD AND ROBOT PROGRAM EVALUATION PROGRAM | |
| JP7424122B2 (en) | Simulation equipment and programs | |
| WO2023073959A1 (en) | Work assistance device and work assistance method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190325 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200519 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200715 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20201215 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210113 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6825026 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: R3D03 |