JP2018097407A - Perturbation learning apparatus and method thereof - Google Patents
Perturbation learning apparatus and method thereof Download PDFInfo
- Publication number
- JP2018097407A JP2018097407A JP2016238304A JP2016238304A JP2018097407A JP 2018097407 A JP2018097407 A JP 2018097407A JP 2016238304 A JP2016238304 A JP 2016238304A JP 2016238304 A JP2016238304 A JP 2016238304A JP 2018097407 A JP2018097407 A JP 2018097407A
- Authority
- JP
- Japan
- Prior art keywords
- learning
- perturbation
- weight
- data
- value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Landscapes
- Filters That Use Time-Delay Elements (AREA)
- Mechanical Light Control Or Optical Switches (AREA)
Abstract
【課題】重み学習を高速に処理できる摂動学習装置を提供する。【解決手段】学習データを要素ごとに分岐する分岐部10と、学習データのカテゴリによって要素の位置ごとの重みが異なるフィルタ係数を、要素のそれぞれに乗じて濾過データを求め、濾過データの要素ごとに強調重み乗じた値を加算した第1出力値Oを求める伝搬部20と、強調重みを補正する摂動係数を加えた摂動重みを生成し、濾過データのそれぞれに対応して設けられ、濾過データに摂動重みを乗じて第2出力値Oδjを求める摂動伝搬部30と、第1出力値から学習目標を表す教師値を減じた第1コスト値O、第2出力値Oδjのそれぞれから教師値を減じた第2コスト値、前記摂動係数δ、及び学習速度の傾きを表す学習係数ηから、強調重みを更新する変化量を求める計算を繰り返する学習部40とを備える。【選択図】図1A perturbation learning apparatus capable of processing weight learning at high speed is provided. The filtering data is obtained by multiplying each of the elements by a branching unit for branching the learning data for each element and a filter coefficient having a different weight for each element position depending on the category of the learning data, and for each element of the filtering data. And a propagation unit 20 for obtaining a first output value O obtained by adding the value multiplied by the enhancement weight, and a perturbation weight obtained by adding a perturbation coefficient for correcting the enhancement weight, and provided corresponding to each of the filtration data. Is multiplied by the perturbation weight to obtain the second output value Oδj, and the teacher value is obtained from each of the first cost value O obtained by subtracting the teacher value representing the learning target from the first output value, and the second output value Oδj. A learning unit that repeats a calculation for obtaining a change amount for updating the weighting weight from the reduced second cost value, the perturbation coefficient δ, and the learning coefficient η representing the gradient of the learning speed. [Selection] Figure 1
Description
本発明は、学習演算を高速処理する摂動学習装置とその方法に関する。 The present invention relates to a perturbation learning apparatus and method for processing learning operations at high speed.
近年、インターネットや様々なセンサから大量のデータを取得する環境が構築されるに伴い、そのデータを解析して高精度な知識処理や未来予測を行う研究及びビジネスが活発に行われている。この潮流の中で特に注目を集めている解析技術のひとつに、ディープラーニング(深層学習)と称されるものがある。 In recent years, as an environment for acquiring a large amount of data from the Internet and various sensors is constructed, research and business for analyzing the data and performing highly accurate knowledge processing and future prediction are actively performed. One of the analysis techniques that has attracted particular attention in this trend is called deep learning.
ディープラーニングとは、ニューラルネットワークを基本とした機械学習技術であり、ニューロンを多層に配置した人工神経回路網にデータを学習させることで、識別や判断を行う機能を有している。 Deep learning is a machine learning technique based on a neural network, and has a function of discriminating and judging by learning data in an artificial neural network in which neurons are arranged in multiple layers.
一般に、ニューラルネットワークの学習とは、ニューロン同士を連結したシナプスの重みを更新することによって行われるが、昨今のディープラーニングでは学習データ数もシナプス数も大規模化しているため、学習に莫大な時間が掛かる。 In general, neural network learning is performed by updating the weights of the synapses that connect the neurons. However, with the recent deep learning, the number of learning data and the number of synapses is large, so it takes a lot of time for learning. It takes.
このような背景の下、CPUやGPUなどのディジタル演算器に代替するアナログ演算器が注目されている。特に、光を信号の伝送媒体として用いる光コンピューティングは、ディープラーニングを高速化するアナログ演算器として有力と考えられている。 Under such a background, an analog arithmetic unit replacing a digital arithmetic unit such as a CPU or a GPU has been attracting attention. In particular, optical computing using light as a signal transmission medium is considered to be promising as an analog computing unit that accelerates deep learning.
アナログ演算器用の学習アルゴリズムとしては、摂動学習法が提案されている。摂動学習法とは、シナプスの重み等の学習すべきパラメータを微少量変化させ、誤差関数に及ぼす影響をモニタすることで、パラメータの修正量を算出する方法である。 A perturbation learning method has been proposed as a learning algorithm for an analog computing unit. The perturbation learning method is a method of calculating a parameter correction amount by changing a parameter to be learned, such as a synaptic weight, by a small amount and monitoring an influence on an error function.
例えば非特許文献1に同時摂動最適化法が開示されている。
For example, Non-Patent
しかしながら、従来の摂動学習法で計算する装置の構成は、出力値と教師値との比較を行い、誤差関数を最小化するように、重みを1つずつ逐次的に学習させる方式である。そのため、ニューラルネットワークの規模が大きい場合には、収束に膨大な時間を要するという課題がある。 However, the configuration of a device that calculates by the conventional perturbation learning method is a method in which the output value is compared with the teacher value, and the weights are sequentially learned one by one so as to minimize the error function. Therefore, when the scale of the neural network is large, there is a problem that enormous time is required for convergence.
本発明は、この課題に鑑みてなされたものであり、重み学習を高速に処理できる摂動学習装置とその方法を提供することを目的とする。 The present invention has been made in view of this problem, and an object of the present invention is to provide a perturbation learning apparatus and method that can process weight learning at high speed.
本実施形態の一態様に係る摂動学習装置は、複数の要素から成る学習データを前記要素ごとに分岐する分岐部と、前記学習データのカテゴリによって前記要素の位置ごとの重みが異なるフィルタ係数を、前記要素のそれぞれに乗じて濾過データを求め、該濾過データを強調する強調重みを、前記濾過データの要素ごとに乗じた値を加算した第1出力値を求める伝搬部と、前記強調重みに、該強調重みを補正する摂動係数を加えた摂動重みを生成し、前記濾過データのそれぞれに対応して設けられ、前記濾過データに前記摂動重みを乗じて第2出力値を求める摂動伝搬部と、前記摂動伝搬部と同じ数設けられ、前記第1出力値から学習目標を表す教師値を減じた第1コスト値、前記第2出力値のそれぞれから前記教師値を減じた第2コスト値、前記摂動係数、及び学習速度の傾きを表す学習係数から、前記強調重みを更新する変化量を求める計算を繰り返す学習部と、前記強調重みのそれぞれに、前記変化量を加算して強調重みを求める重み更新部とを備えることを要旨とする。 A perturbation learning device according to an aspect of the present embodiment includes a branching unit that branches learning data composed of a plurality of elements for each element, and a filter coefficient having a different weight for each position of the element depending on the category of the learning data. Multiplying each of the elements to obtain filtration data, a weighting unit for emphasizing the filtration data, a propagation unit for obtaining a first output value obtained by adding a value multiplied for each element of the filtration data, and the enhancement weights, A perturbation propagation unit that generates a perturbation weight by adding a perturbation coefficient for correcting the enhancement weight, is provided corresponding to each of the filtered data, and multiplies the filtered data by the perturbation weight to obtain a second output value; The same number as the perturbation propagation unit, a first cost value obtained by subtracting a teacher value representing a learning target from the first output value, a second cost value obtained by subtracting the teacher value from each of the second output values, A learning unit that repeats calculation for obtaining a change amount for updating the enhancement weight from the perturbation coefficient and a learning coefficient that represents a gradient of the learning speed, and obtaining the enhancement weight by adding the change amount to each of the enhancement weights. The gist is to include a weight updating unit.
本実施形態の一態様に係る摂動学習方法は、上記の摂動学習装置が行う摂動学習方法であって、複数の要素から成る学習データを前記要素ごとに分岐し、前記学習データのカテゴリによって前記要素の位置ごとの重みが異なるフィルタ係数を、前記要素のそれぞれに乗じて濾過データを求め、該濾過データを強調する強調重みを、濾過データの要素ごとに乗じた値を加算した第1出力値を求め、前記強調重みに、該強調重みを補正する摂動係数を加えた摂動重みを生成し、前記濾過データのそれぞれに対応して設けられ、前記濾過データに前記摂動重みを乗じて第2出力値を求め、前記第1出力値から学習目標を表す教師値を減じた第1コスト値、前記第2出力値のそれぞれから前記教師値を減じた第2コスト値、前記摂動係数、及び学習速度の傾きを表す学習係数から、前記強調重みを更新する変化量を求める計算を繰り返し、前記強調重みのそれぞれに、前記変化量を加算して強調重みを求めることを要旨とする。 A perturbation learning method according to an aspect of the present embodiment is a perturbation learning method performed by the perturbation learning apparatus, wherein learning data including a plurality of elements is branched for each element, and the elements are classified according to the category of the learning data. A filter coefficient having a different weight for each position is multiplied by each of the elements to obtain filtration data, and a first output value obtained by adding a value obtained by multiplying the emphasis weight for emphasizing the filtration data by the element of the filtration data is added. And generating a perturbation weight obtained by adding a perturbation coefficient for correcting the enhancement weight to the enhancement weight, provided corresponding to each of the filtration data, and multiplying the filtration data by the perturbation weight to obtain a second output value. The first cost value obtained by subtracting the teacher value representing the learning target from the first output value, the second cost value obtained by subtracting the teacher value from each of the second output values, the perturbation coefficient, and the learning speed From the learning coefficient representing the gradient, repeating the calculation for obtaining the amount of change to update the emphasis weights to each of the enhancement weight, and summarized in that for obtaining the enhancement weight by adding the amount of change.
本発明によれば、重み学習を高速に処理できる摂動学習装置とその方法を提供することができる。 According to the present invention, it is possible to provide a perturbation learning apparatus and method that can process weight learning at high speed.
以下、本発明の実施形態について図面を用いて説明する。複数の図面中同一のものに
は同じ参照符号を付し、説明は繰り返さない。
Hereinafter, embodiments of the present invention will be described with reference to the drawings. The same reference numerals are given to the same components in a plurality of drawings, and the description will not be repeated.
〔第1実施形態〕
図1に、第1実施形態に係る摂動学習装置1の機能構成例を示す。図2に、摂動学習装置1の動作フローを示す。
[First Embodiment]
FIG. 1 shows a functional configuration example of the
摂動学習装置1は、分岐部10、伝搬部20、摂動伝搬部30、学習部40、及び重み更新部50を備える。摂動学習装置1は、例えば階層型ニューラルネットワークの学習演算を高速に処理する。
The
分岐部10は、複数の要素から成る学習データXを要素ごとに分岐する(ステップS1)。学習データXは、例えばコヒーレント光源で与えられる。分岐部10は、この例では光分岐器を用いた。
The branching
学習データXは、例えば100ピクセルの特定の人の顔の画像データであると仮定する。分岐部10は、例えば100ピクセルの学習データを1×100個(n個)に分岐する。
It is assumed that the learning data X is, for example, image data of a specific person's face of 100 pixels. For example, the branching
分岐部10は、例えば石英平面光導波路(PLC)、フレキシブルポリマー光導波路などで構成する。分岐部10から出射する光信号は、各分岐出力に設けられたコリメータレンズによって平行光となって伝搬部20に入力される。なお、図1において、コリメータレンズの表記は省略している。光信号の波長は、例えば1550nmである。
The
伝搬部20は、学習データXのカテゴリによって要素の位置ごとの重みが異なるフィルタ係数を、要素のそれぞれに乗じて濾過データを求め、該濾過データを強調する強調重みを、濾過データの要素ごとに乗じた値を加算した第1出力値Oを求める(ステップS2)。濾過データは、摂動伝搬部30に出力される。学習データXのカテゴリは、学習データXが例えば画像データの場合の当該画像の種別(例えば人、猫、犬等)である。
The
要素の位置ごととは、分岐した学習データx1,…,xj,…,xnの(以降n個を代表して添え字jで表記する場合がある。他の表記も同様である。)それぞれのことである。分岐部10の分岐出力のそれぞれは、学習データXの要素(ピクセル)と一対一で対応する。
For each element position, the branched learning data x 1 ,..., X j ,..., X n may be represented by a subscript j on behalf of n pieces. ) Each of them. Each branch output of the
フィルタ係数は、学習データXが例えば人の顔であれば、人の顔の目、鼻、口、及び耳等の位置ごとに重みが異なり、それらの特徴部分を強調する係数f1,…,fj,…,fnである。つまり、xj×fjは、学習対象の特徴部分を濾過し易くした濾過データである。 If the learning data X is, for example, a human face, the filter coefficients have different weights for each position of the human face such as eyes, nose, mouth, ears, etc., and coefficients f 1 ,. f j ,..., f n . That is, x j × f j is filtered data that makes it easy to filter the characteristic portion to be learned.
伝搬部20は、濾過データの要素ごとに、当該濾過データを強調する強調重みwjを乗じた値を加算した第1出力値Oを求める。伝搬部20について詳しくは後述する。
For each element of the filtered data, the
摂動伝搬部30は、強調重みwjに、該強調重みwjを補正する摂動係数δを加えた摂動重みwj+δを生成し、濾過データ(xj×fj)のそれぞれに対応して設けられる。つまり、摂動伝搬部30は、n個の摂動伝搬部301〜30nで構成される。以降において摂動伝搬部30の参照符号は、30jと表記する。
摂動伝搬部30jは、濾過データ(xj×fj)のそれぞれに摂動重みwj+δを乗じて第2出力値Oδjを求める(ステップS3)。n個の第2出力値Oδjは、学習部40に出力される。
The
学習部40は、摂動伝搬部30jと同じ数の学習部401〜40nで構成される。学習部40jは、第1出力値Oから学習目標を表す教師値Tを減じた第1コスト値E、第2出力値Oδjのそれぞれから教師値Tを減じた第2コスト値Eδj、摂動係数δ、及び学習速度の傾きを表す学習係数ηから、強調重みwjを更新する変化量Δwj_newを求める(ステップS4)。この強調重みwjを更新する変化量Δwj_newを求める処理は、図示しない制御部によって強調重みwjが収束するまで繰り返される(ステップS5のNO)。
The
重み更新部50は、強調重みwjのそれぞれに、変化量Δwj_newを加算して強調重みwjnewを求める(ステップS6)。ステップS6の計算は、強調重みwjが収束するまで繰り返される。
The
以上説明した本実施形態の摂動学習装置1によれば、重み更新の計算を並列に処理するので重み学習を高速に処理できる。以降、図面を参照して各機能構成部を更に詳しく説明する。
According to the
(伝搬部)
図3に、伝搬部20のより具体的な構成例を示す。伝搬部20は、入力フィルタ21、強調フィルタ22、光結合器23、及び受光部24を備える。
(Propagation part)
FIG. 3 shows a more specific configuration example of the
入力フィルタ21は、学習データwjの各々の光強度を、フィルタの透過率によってfj倍に変換する。この作用は、例えば液晶を用いた光減衰フィルタを用いることで実現できる。光減衰フィルタの透過率は、1以上であることは原理的に不可能であるから、fj>1の場合、変換係数a>1を用い、1>fj/aと変換すれば良い。この場合、後段の例えば学習部40j等でa倍に変換すれば良い。
The input filter 21 converts the light intensity of each of the learning data w j to f j times according to the transmittance of the filter. This effect can be realized by using, for example, an optical attenuation filter using liquid crystal. Since it is impossible in principle that the transmittance of the light attenuating filter is 1 or more, when f j > 1, the conversion coefficient a> 1 may be used and the conversion may be made as 1> f j / a. In this case, it may be converted to a times, for example, by the
入力フィルタ21は、光減衰器である電気光学変調器、音響光学変調器、及びMEMSミラー等で構成することができる。また、光増幅器を用いても良い。その場合は、光増幅器である半導体光増幅器(SOA)を用いることができる。 The input filter 21 can be composed of an electro-optic modulator, an acousto-optic modulator, a MEMS mirror, or the like that is an optical attenuator. An optical amplifier may be used. In that case, a semiconductor optical amplifier (SOA) which is an optical amplifier can be used.
入力フィルタ21は、学習データXのカテゴリによって学習データの要素の位置ごとに重みが異なるフィルタ係数fjを、学習データxjに乗じた濾過データを出力する。入力フィルタ21は、学習するデータXのカテゴリに対応させて予め伝搬部20内に設けておく。又は、電気光学変調器の減衰率を、学習する度に設定するようにしても良い。
The input filter 21 outputs filtered data obtained by multiplying the learning data x j by a filter coefficient f j having a different weight for each position of the learning data element depending on the category of the learning data X. The input filter 21 is provided in the
強調フィルタ22は、入力フィルタ21と同様に光減衰器である電気光学変調器等で構成することができる。強調フィルタ22の強調重みwjは、重み更新部50で求めた変化量Δwj_newを、1回前の強調重みwjoldに加算した値である。
The enhancement filter 22 can be composed of an electro-optic modulator, which is an optical attenuator, like the input filter 21. The enhancement weight w j of the enhancement filter 22 is a value obtained by adding the change amount Δw j_new obtained by the
初期値の強調重みwjは予め設定されている。初期値の強調重みwjは、繰り返し更新され、収束値まで変化する。 The initial weight w j is set in advance. The initial weight w j is updated repeatedly and changes to the convergence value.
光結合器23は、強調フィルタ22が出力する濾過データを強調(積演算)したデータ(xj×fj×wj)を和演算する。この場合は、例えばLCOS(Liquid Crystal On Silicon)を用いて波面結合により積演算したデータを光結合しても良い。又は、PLCなどの光導波路を用いて結合しても良い。 The optical coupler 23 performs a sum operation on data (x j × f j × w j ) obtained by emphasizing (product operation) the filtered data output from the enhancement filter 22. In this case, for example, data obtained by product operation by wavefront coupling using LCOS (Liquid Crystal On Silicon) may be optically coupled. Or you may couple | bond using optical waveguides, such as PLC.
光結合器23は、次式に示す第1出力値Oを出力する。 The optical coupler 23 outputs a first output value O expressed by the following equation.
受光器24は、第1出力値Oを電流値に変換する。 The light receiver 24 converts the first output value O into a current value.
摂動伝搬部30jは、伝搬部20の入力フィルタ21と光結合器23を削除して構成できる。つまり、摂動伝搬部30jは、濾過データのそれぞれに摂動重みwj+δを乗じて第2出力値Oδjを求めるものである。よって、摂動伝搬部30jは、強調フィルタ22と受光部24の組みで構成できる。図3に対応する摂動伝搬部30jの表記は省略する。
The
(学習部)
図4に、学習部40jのより具体的な構成例を示す。学習部40jは、例えばアナログ電気回路で構成することができる。
(Learning Department)
FIG. 4 shows a more specific configuration example of the
学習部40jは、3個の差動増幅器41j,42j,43j、及び計算部44jを備える。学習部40jは、jの参照符号から明らかなように摂動伝搬部30jと同じ数だけ設けられる。
The
差動増幅器41jは、伝搬部20が出力する第1出力値Oと、外部から入力される学習目標を表す教師値Tとの差分である第1コスト値E(O−T)を算出する。差動増幅器42jは、摂動伝搬部30jが出力する第2出力値Oδjと、教師値Tとの差分である第2コスト値Eδjを算出する。差動増幅器43jは、第1コスト値Eと第2コスト値Eδjの差分E−Eδjを算出する。
The
計算部44jは、外部から入力される強調重みwjを補正する摂動係数δと学習速度の傾きを表す学習係数η、及び差動増幅器43jが出力する差分E−Eδjを入力として、強調重みwjを更新する変化量wj_newを次式で計算する。 The calculation unit 44 j receives, as inputs, a perturbation coefficient δ for correcting the emphasis weight w j input from the outside, a learning coefficient η representing the gradient of the learning speed, and a difference EE δj output by the differential amplifier 43 j . A change amount w j_new for updating the emphasis weight w j is calculated by the following equation.
〔第2実施形態〕
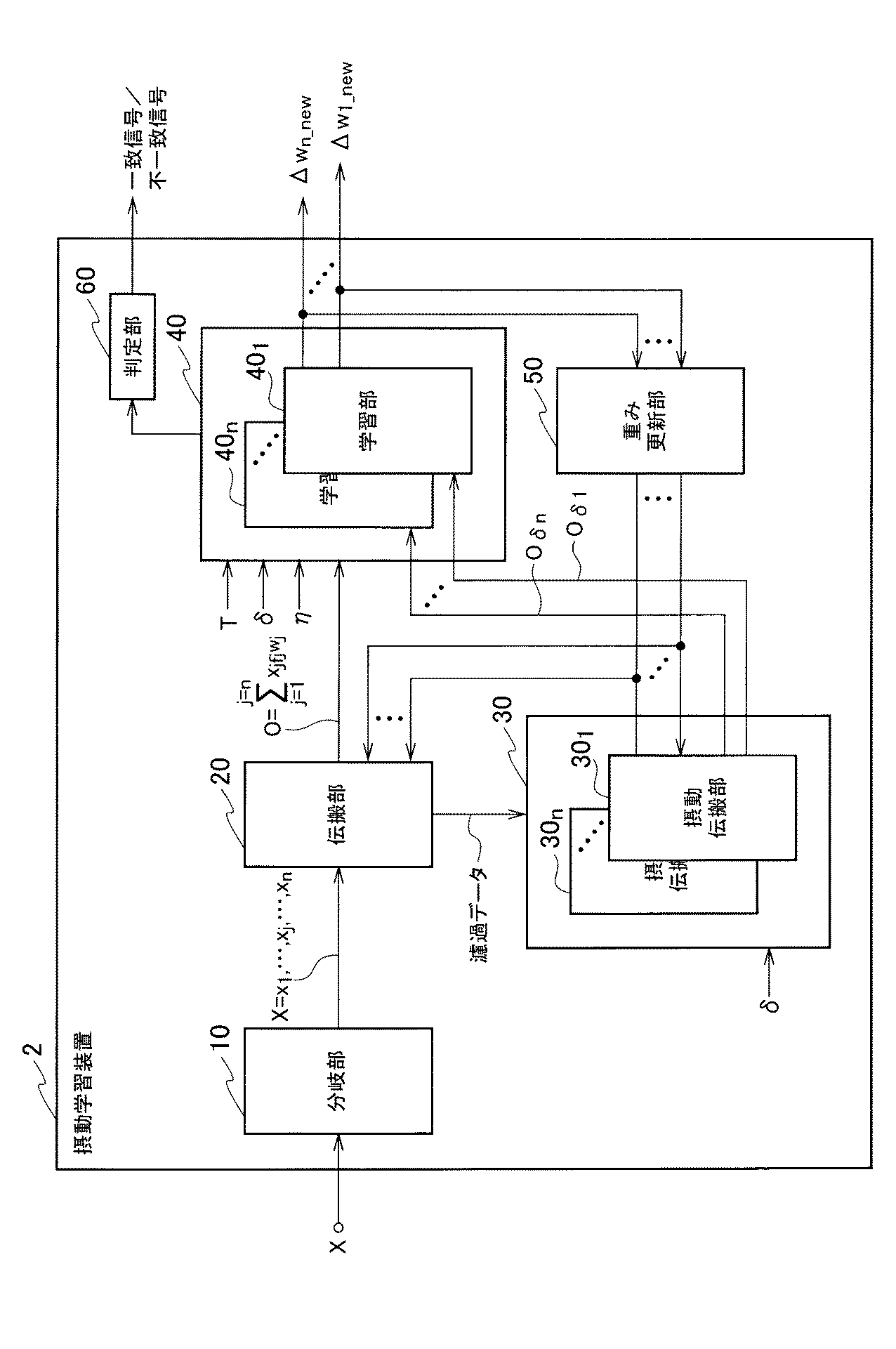
図5に、第2実施形態に係る摂動学習装置2の機能構成例を示す。摂動学習装置2は、摂動学習装置1(図1)に対して判定部60を備える点で異なる。
[Second Embodiment]
FIG. 5 shows a functional configuration example of the perturbation learning device 2 according to the second embodiment. The perturbation learning device 2 is different from the perturbation learning device 1 (FIG. 1) in that a
判定部60は、第1コスト値Oが閾値より小さい場合に学習データXのカテゴリがフィルタ係数fjのカテゴリと一致していることを表す一致信号を出力し、第1コスト値Oが閾値より大きい場合に学習データXのカテゴリがフィルタ係数fjのカテゴリと不一致であることを表す不一致信号を出力する。
The
摂動学習装置2によれば、入力した学習データXが、学習する対象のカテゴリと一致しているか否かの判定を行うことができる。したがって、摂動学習装置2は、例えば画像識別に用いることができる。 According to the perturbation learning device 2, it is possible to determine whether or not the input learning data X matches the category to be learned. Therefore, the perturbation learning device 2 can be used for image identification, for example.
(学習速度シミュレーション)
本実施形態の効果を確認する目的で、比較例と摂動学習装置1(図1)の学習速度の比較を行った。学習速度の比較は、ニューラルネットワークのハードウェアにおいて、1秒間に書き換え可能なパラメータの更新回数CUPS(Connections Updated Per Second)を比較することで行った。
(Learning speed simulation)
In order to confirm the effect of the present embodiment, the learning speeds of the comparative example and the perturbation learning device 1 (FIG. 1) were compared. The learning speed was compared by comparing the number of parameter updates CUPS (Connections Updated Per Second) that can be rewritten per second in the hardware of the neural network.
シミュレーションの条件は、ニューラルネットワークの規模を、入力数1000ニューロン、総数10層の10000ニューロンと仮定した。また、四則演算を実行するために必要なクロック数は、和演算で2クロック、減演算で2クロック、積演算で4クロック、除演算で8クロック、指数演算で16クロックと仮定した。比較例のCPUによる重み書き換え数は、1.8MCUPSと試算された。 As simulation conditions, the neural network was assumed to have a scale of 1000 neurons and 10000 neurons with a total of 10 layers. The number of clocks required to execute the four arithmetic operations is assumed to be 2 clocks for sum operation, 2 clocks for subtraction operation, 4 clocks for product operation, 8 clocks for division operation, and 16 clocks for exponent operation. The number of weight rewrites by the CPU of the comparative example was estimated to be 1.8 MCUPS.
一方、学習部40jを10個とし、入力フィルタ21の遅延時間を0.1ns、強調フィルタ22の遅延時間を0.1ns、受光部24の遅延時間を1ns、学習部40jの遅延時間を0.1ns、及び繰り返し演算を制御する制御部の遅延時間を1nsと仮定した。この場合の摂動学習装置1による学習速度は、100MCUPSと試算された。
On the other hand, there are 10 learning
このように本実施形態の摂動学習装置1は、学習速度を約55倍に高速化することができた。
Thus, the
以上説明したように本実施形態の摂動学習装置1によれば、重み学習を高速に処理できる。また、本実施形態の摂動学習装置2によれば、学習データXが所定のカテゴリに一致しているか否かを判定することができる。
As described above, according to the
摂動学習装置1,2は、光部品を用いて構成した例で説明を行った。光をキャリアとして用いると、3次元空間に光配線を形成することができ、ショートの恐れや配線の取り回しといったデメリットが少ない。
The
なお、本発明はこの例に限定されない。光部品を用いずに本実施形態の摂動学習装置1,2を構成しても良い。光は電磁波の一種である。よって、例えば分岐部10は、電磁波分岐器で構成することが可能である。また、光結合器23も電磁波結合器で構成することが可能である。このように本発明は、上記の実施形態に限定されるものではなく、その要旨の範囲内で変形が可能である。
Note that the present invention is not limited to this example. You may comprise the
本実施の形態は、例えば階層型ニューラルネットワークの学習装置に適用することができ、光コンピューティングなどの分野に利用可能である。 The present embodiment can be applied to, for example, a learning device for a hierarchical neural network, and can be used in fields such as optical computing.
1、2:摂動学習装置
10:分岐部
20:伝搬部
21:入力フィルタ
22:重みフィルタ
23:光結合器
24:受光部
30、301、30j、30n:摂動伝搬部
40、401、40j、40n:学習部
50:重み更新部
1, 2: Perturbation learning device 10: Branching unit 20: Propagating unit 21: Input filter 22: Weight filter 23: Optical coupler 24:
Claims (3)
前記学習データのカテゴリによって前記要素の位置ごとの重みが異なるフィルタ係数を、前記要素のそれぞれに乗じて濾過データを求め、該濾過データを強調する強調重みを、前記濾過データの要素ごとに乗じた値を加算した第1出力値を求める伝搬部と、
前記強調重みに、該強調重みを補正する摂動係数を加えた摂動重みを生成し、前記濾過データのそれぞれに対応して設けられ、前記濾過データに前記摂動重みを乗じて第2出力値を求める摂動伝搬部と、
前記摂動伝搬部と同じ数設けられ、前記第1出力値から学習目標を表す教師値を減じた第1コスト値、前記第2出力値のそれぞれから前記教師値を減じた第2コスト値、前記摂動係数、及び学習速度の傾きを表す学習係数から、前記強調重みを更新する変化量を求める計算を繰り返す学習部と、
前記強調重みのそれぞれに、前記変化量を加算して強調重みを求める重み更新部と
を備えることを特徴とする摂動学習装置。 A branching unit for branching learning data composed of a plurality of elements for each element;
Filtered data is obtained by multiplying each of the elements by a filter coefficient whose weight for each element position varies depending on the category of the learning data, and an emphasis weight for emphasizing the filtered data is multiplied for each element of the filtered data. A propagation unit for obtaining a first output value obtained by adding the values;
A perturbation weight obtained by adding a perturbation coefficient for correcting the emphasis weight to the emphasis weight is generated, provided corresponding to each of the filtered data, and a second output value is obtained by multiplying the filtered data by the perturbation weight. A perturbation propagation section;
The same number as the perturbation propagation unit, a first cost value obtained by subtracting a teacher value representing a learning target from the first output value, a second cost value obtained by subtracting the teacher value from each of the second output values, A learning unit that repeats calculation for obtaining a change amount for updating the weighting weight from a perturbation coefficient and a learning coefficient that represents a gradient of the learning speed;
A perturbation learning device comprising: a weight update unit that obtains an enhancement weight by adding the amount of change to each of the enhancement weights.
前記判定部は、前記第1コスト値が閾値より小さい場合に前記学習データのカテゴリが前記フィルタ係数のカテゴリと一致していることを表す一致信号を出力し、前記第1コスト値が前記閾値より大きい場合に前記学習データのカテゴリが前記フィルタ係数のカテゴリと不一致であることを表す不一致信号を出力することを特徴とする請求項1に記載の摂動学習装置。 A determination unit for determining the magnitude of the first cost value;
The determination unit outputs a match signal indicating that the category of the learning data matches the category of the filter coefficient when the first cost value is smaller than a threshold value, and the first cost value is less than the threshold value. The perturbation learning apparatus according to claim 1, wherein when it is large, a perturbation learning device is output that indicates that the category of the learning data does not match the category of the filter coefficient.
複数の要素から成る学習データを前記要素ごとに分岐し、
前記学習データのカテゴリによって前記要素の位置ごとの重みが異なるフィルタ係数を、前記要素のそれぞれに乗じて濾過データを求め、該濾過データを強調する強調重みを、濾過データの要素ごとに乗じた値を加算した第1出力値を求め、
前記強調重みに、該強調重みを補正する摂動係数を加えた摂動重みを生成し、前記濾過データのそれぞれに対応して設けられ、前記濾過データに前記摂動重みを乗じて第2出力値を求め、
前記第1出力値から学習目標を表す教師値を減じた第1コスト値、前記第2出力値のそれぞれから前記教師値を減じた第2コスト値、前記摂動係数、及び学習速度の傾きを表す学習係数から、前記強調重みを更新する変化量を求める計算を繰り返し、
前記強調重みのそれぞれに、前記変化量を加算して強調重みを求める
ことを特徴とする摂動学習方法。 A perturbation learning method performed by a perturbation learning device,
Branching learning data consisting of a plurality of elements for each element,
A value obtained by multiplying each of the elements by a filter coefficient whose weight for each position of the element differs depending on the category of the learning data, obtaining filtration data, and multiplying an emphasis weight for emphasizing the filtration data for each element of the filtration data To obtain a first output value obtained by adding
A perturbation weight obtained by adding a perturbation coefficient for correcting the enhancement weight to the enhancement weight is generated, provided corresponding to each of the filtered data, and a second output value is obtained by multiplying the filtered data by the perturbed weight. ,
A first cost value obtained by subtracting a teacher value representing a learning target from the first output value, a second cost value obtained by subtracting the teacher value from each of the second output values, the perturbation coefficient, and a learning speed gradient. From the learning coefficient, the calculation for obtaining the amount of change for updating the weighting is repeated,
A perturbation learning method, wherein the enhancement weight is obtained by adding the change amount to each of the enhancement weights.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016238304A JP6534987B2 (en) | 2016-12-08 | 2016-12-08 | Perturbation learning device and its method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016238304A JP6534987B2 (en) | 2016-12-08 | 2016-12-08 | Perturbation learning device and its method |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018097407A true JP2018097407A (en) | 2018-06-21 |
| JP6534987B2 JP6534987B2 (en) | 2019-06-26 |
Family
ID=62632969
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016238304A Active JP6534987B2 (en) | 2016-12-08 | 2016-12-08 | Perturbation learning device and its method |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6534987B2 (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018116420A (en) * | 2017-01-17 | 2018-07-26 | 日本電信電話株式会社 | Perturbation learning apparatus and method |
| WO2020161799A1 (en) * | 2019-02-05 | 2020-08-13 | 日本電気株式会社 | Learning device, learning method, non-transitory computer-readable medium having control program stored thereon, and estimation device |
-
2016
- 2016-12-08 JP JP2016238304A patent/JP6534987B2/en active Active
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018116420A (en) * | 2017-01-17 | 2018-07-26 | 日本電信電話株式会社 | Perturbation learning apparatus and method |
| WO2020161799A1 (en) * | 2019-02-05 | 2020-08-13 | 日本電気株式会社 | Learning device, learning method, non-transitory computer-readable medium having control program stored thereon, and estimation device |
| CN113491105A (en) * | 2019-02-05 | 2021-10-08 | 日本电气株式会社 | Learning apparatus, learning method, non-transitory computer-readable medium storing control program, and estimation apparatus |
| JPWO2020161799A1 (en) * | 2019-02-05 | 2021-11-25 | 日本電気株式会社 | Learning device, learning method, and estimation device |
| JP7251558B2 (en) | 2019-02-05 | 2023-04-04 | 日本電気株式会社 | LEARNING DEVICE, LEARNING METHOD, AND ESTIMATION DEVICE |
| CN113491105B (en) * | 2019-02-05 | 2023-09-12 | 日本电气株式会社 | Learning device, learning method, non-transitory computer-readable medium storing control program, and estimation device |
| US11825185B2 (en) | 2019-02-05 | 2023-11-21 | Nec Corporation | Learning device, learning method, and non transitory computer-readable medium having control program stored thereon, and estimation device |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6534987B2 (en) | 2019-06-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| De Marinis et al. | Photonic neural networks: A survey | |
| KR102542496B1 (en) | Apparatus and method for optical neural networks | |
| CN109784486B (en) | An optical neural network processor and its training method | |
| JP6791800B2 (en) | Calculation method using computer system and recurrent neural network | |
| JP6017590B2 (en) | Method and apparatus for spiking neural computation | |
| JP2021523461A (en) | Training of photon neural networks through in-situ backpropagation | |
| US11416743B2 (en) | Swarm fair deep reinforcement learning | |
| EP2812855A1 (en) | Methods and apparatus for spiking neural computation | |
| EP2812853A1 (en) | Methods and apparatus for spiking neural computation | |
| JP2015510193A5 (en) | ||
| JP7354463B2 (en) | Data protection methods, devices, servers and media | |
| JP2018200391A (en) | Optical signal processing circuit | |
| JP6534987B2 (en) | Perturbation learning device and its method | |
| Cauchon et al. | BraggNet: Complex photonic integrated circuit reconstruction using deep learning | |
| US20240135144A1 (en) | Boson Sampler and Neural Network for Data Generation | |
| Zhao et al. | High-performance real-world optical computing trained by in situ gradient-based model-free optimization | |
| Peng et al. | Nonmonotone BFGS-trained recurrent neural networks for temporal sequence processing | |
| JP2019191899A (en) | Learning device, learning method, and learning program | |
| JP6655032B2 (en) | Perturbation learning device and method | |
| EP4156026A1 (en) | Signal processing method in a neural network | |
| Jonuzi et al. | Numerical Analysis of a Self-Calibrating Time-Spatial Interleaving Photonic Convolutional Accelerator | |
| Rebala et al. | (Artificial) Neural Networks | |
| Xu et al. | Design of sparse two-dimensional FIR notch filter based on BP neural network | |
| WO2024079459A1 (en) | Boson sampler and neural network for data generation | |
| Fyrillas et al. | High-Fidelity Quantum Information Processing with Machine Learning-Characterized Photonic Circuits |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181206 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190528 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190531 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190530 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6534987 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |