JP2017527011A - イメージをアップスケーリングする方法及び装置 - Google Patents
イメージをアップスケーリングする方法及び装置 Download PDFInfo
- Publication number
- JP2017527011A JP2017527011A JP2017500884A JP2017500884A JP2017527011A JP 2017527011 A JP2017527011 A JP 2017527011A JP 2017500884 A JP2017500884 A JP 2017500884A JP 2017500884 A JP2017500884 A JP 2017500884A JP 2017527011 A JP2017527011 A JP 2017527011A
- Authority
- JP
- Japan
- Prior art keywords
- image
- superpixel
- cross
- similarity matching
- scale self
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 238000000034 method Methods 0.000 title claims abstract description 44
- 239000013598 vector Substances 0.000 claims abstract description 56
- 238000012360 testing method Methods 0.000 claims abstract description 39
- 238000012545 processing Methods 0.000 claims description 16
- 239000002131 composite material Substances 0.000 claims description 6
- 238000013459 approach Methods 0.000 description 14
- 238000010586 diagram Methods 0.000 description 9
- 230000015572 biosynthetic process Effects 0.000 description 7
- 230000008569 process Effects 0.000 description 7
- 238000003786 synthesis reaction Methods 0.000 description 7
- 230000002123 temporal effect Effects 0.000 description 5
- 238000012417 linear regression Methods 0.000 description 4
- 230000011218 segmentation Effects 0.000 description 4
- 230000008901 benefit Effects 0.000 description 3
- 230000015556 catabolic process Effects 0.000 description 3
- 238000006731 degradation reaction Methods 0.000 description 3
- 238000012935 Averaging Methods 0.000 description 2
- 230000006978 adaptation Effects 0.000 description 2
- 238000004458 analytical method Methods 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 230000006872 improvement Effects 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 230000002457 bidirectional effect Effects 0.000 description 1
- 238000013145 classification model Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000018109 developmental process Effects 0.000 description 1
- 230000004438 eyesight Effects 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 238000003709 image segmentation Methods 0.000 description 1
- 238000013507 mapping Methods 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000011514 reflex Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 239000013589 supplement Substances 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
- 230000016776 visual perception Effects 0.000 description 1
Images










Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T3/00—Geometric image transformations in the plane of the image
- G06T3/40—Scaling of whole images or parts thereof, e.g. expanding or contracting
- G06T3/4053—Scaling of whole images or parts thereof, e.g. expanding or contracting based on super-resolution, i.e. the output image resolution being higher than the sensor resolution
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/50—Image enhancement or restoration using two or more images, e.g. averaging or subtraction
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Image Processing (AREA)
- Image Analysis (AREA)
- Television Systems (AREA)
Abstract
入力イメージ(I2)をアップスケーリングする方法及び装置(20)が記載される。スーパーピクセルを使用したクロススケール自己相似性マッチングが、アップスケーリングされたイメージにおける欠如したディテールを代用するものを得るために用いられる。装置(20)は、入力イメージ(I2)及び1つ以上の補助入力イメージ(I1,I3)のために、一貫性のあるスーパーピクセルを生成し、スーパーピクセルに基づきスーパーピクセルテストベクトルを生成するスーパーピクセルベクトル生成部(7)を有する。マッチングブロック(5)は、スーパーピクセルテストベクトルを用いて入力イメージ及び1つ以上の補助入力イメージに対してクロススケール自己相似性マッチング(12)を実施する。最後に、出力イメージ生成部(22)は、クロススケール自己相似性マッチング(12)の結果を用いて、アップスケーリングされた出力イメージ(O2)を生成する。
Description
本原理は、イメージをアップスケーリングする方法及び装置に関係がある。より具体的には、イメージをアップスケーリングする方法及び装置であって、アップスケーリング品質を高めるためにスーパーピクセル及び補助イメージ(auxiliary images)を使用するものが記載される。
超解像(super-resolution)技術は、現在、複数の用途によって押し進められている。例えば、その2k及び4k改良機を含むUHDTVのような、HDTVイメージフォーマットの後継は、既に存在しているビデオコンテンツがより大きいディスプレイに合うようにアップスケーリングされる必要がある場合に、超解像技術から恩恵を受けうる。夫々が比較的小さい解像度である複数のビューカメラを必要とするライトフィールドカメラ(light field camera(s))は、最新のシステムカメラ及びDSLRカメラ(DSLR:Digital Single Lens Reflex)に匹敵しうるピクチャ品質を提供するために、インテリジェント・アップスケーリングを同様に必要とする。第3の用途はビデオ圧縮であり、低解像イメージ又はビデオストリームは復号され、追加の超解像エンハンスメントレイヤによって強化される。このエンハンスメントレイヤは、圧縮されたデータ内に追加として埋め込まれ、超解像度のアップスケーリングされたイメージ又はビデオを介して前者を補う働きをする。
本願で記載される考えは、“Image and video upscaling from local self-examples”,ACM Transactions on Graphics,Vol.30 (2011),pp.12:1-12:11の中でG. Freedman et al.(非特許文献1)によって提案されるような、イメージ固有の自己相似性(self-similarities)を利用する技術に基づく。この基礎論文は静止イメージに制限されているが、その後の研究は、J. M. Salvador et al.による論文:“Patch-based spatio-temporal super-resolution for video with non-rigid motion”,Journal of Image Communication,Vol.28 (2013),pp.483-493(非特許文献2)において論じられているように、ビデオのアップスケーリングを扱うために複数のイメージを組み込んだ。
あいにく、イメージのアップスケーリングのための如何なる方法も、悲惨な品質低下を伴う。
過去10年間、スーパーピクセルアルゴリズムは、イメージセグメンテーションのための広く受け入れられ且つ適用された方法となっており、後の処理タスクのための複雑さの低減を提供する。スーパーピクセルセグメンテーションは、イメージのピクセルグリッドの剛構造から、イメージにおけるオブジェクトを定義する意味記述であって、イメージ処理及びコンピュータビジョンアルゴリズムにおけるそのポピュラリティを説明するものへ切り替えることの利点を提供する。
スーパーピクセルアルゴリズムに関する研究は、“Learning a classification model for segmentation”,IEEE International Conference on Computer Vision (ICCV) 2003,pp.10-17の中でX. Ren et al.(非特許文献3)によって提案されている処理集約度の高い特徴グルーピング方法(processing intensive feature grouping method)から始まった。その後に、スーパーピクセル生成のためのより効率的な解決法、例えば、“SLIC superpixels compared to state-of-the-art superpixel methods”,IEEE Transactions on Pattern Analysis and Machine Intelligence,Vol.34 (2012),pp.2274-2282の中でR. Achanta et al.(非特許文献4)によって紹介されたSimple Linear Iterative Clustering(SLIC)、が提案された。初期の解決法は静止イメージに焦点を当てていたが、その後の開発は、ビデオへのスーパーピクセルの適用を目的としている。スーパーピクセルの適用には、それらの時間的一貫性が必要である。M. Reso et al.,“Temporally Consistent Superpixels”,International Conference on Computer Vision (ICCV),2013,pp.385-392(非特許文献5)において、この要求を実現するアプローチが記載されており、ビデオシーケンス内でトレース可能なスーパーピクセルを提供する。
G. Freedman et al.,"Image and video upscaling from local self-examples",ACM Transactions on Graphics,Vol.30 (2011),pp.12:1-12:11
J. M. Salvador et al.,"Patch-based spatio-temporal super-resolution for video with non-rigid motion",Journal of Image Communication,Vol.28 (2013),pp.483-493
X. Ren et al.,"Learning a classification model for segmentation",IEEE International Conference on Computer Vision (ICCV) 2003,pp.10-17
R. Achanta et al.,"SLIC superpixels compared to state-of-the-art superpixel methods",IEEE Transactions on Pattern Analysis and Machine Intelligence,Vol.34 (2012),pp.2274-2282
M. Reso et al.,"Temporally Consistent Superpixels",International Conference on Computer Vision (ICCV),2013,pp.385-392
イメージのアップスケーリングのための改善された解決法であって、品質低下を小さくすることを達成することができる解決法を記載すること目的とする。
一実施形態に従って、入力イメージをアップスケーリングする方法であって、スーパーピクセルを使用したクロススケール(cross-scale)自己相似性マッチングが、アップスケーリングされたイメージにおける不足しているディテールを代用するものを得るために用いられる、前記方法は:
− 前記入力イメージ及び1つ以上の補助入力イメージのために、一貫性のあるスーパーピクセルを生成することと、
− 前記一貫性のあるスーパーピクセルに基づきスーパーピクセルテストベクトルを生成することと、
− 前記スーパーピクセルテストベクトルを用いて前記入力イメージ及び前記1つ以上の補助入力イメージに対してクロススケール自己相似性マッチングを実施することと、
− 前記クロススケール自己相似性マッチングの結果を用いて、アップスケーリングされた出力イメージを生成することと
を有する。
− 前記入力イメージ及び1つ以上の補助入力イメージのために、一貫性のあるスーパーピクセルを生成することと、
− 前記一貫性のあるスーパーピクセルに基づきスーパーピクセルテストベクトルを生成することと、
− 前記スーパーピクセルテストベクトルを用いて前記入力イメージ及び前記1つ以上の補助入力イメージに対してクロススケール自己相似性マッチングを実施することと、
− 前記クロススケール自己相似性マッチングの結果を用いて、アップスケーリングされた出力イメージを生成することと
を有する。
然るに、コンピュータ可読記憶媒体は、入力イメージをアップスケーリングすることを可能にする命令を記憶しており、スーパーピクセルを使用したクロススケール自己相似性マッチングが、アップスケーリングされたイメージにおける不足しているディテールを代用するものを得るために用いられる。前記命令は、コンピュータによって実行される場合に、該コンピュータに:
− 前記入力イメージ及び1つ以上の補助入力イメージのために、一貫性のあるスーパーピクセルを生成させ、
− 前記一貫性のあるスーパーピクセルに基づきスーパーピクセルテストベクトルを生成させ、
− 前記スーパーピクセルテストベクトルを用いて前記入力イメージ及び前記1つ以上の補助入力イメージに対してクロススケール自己相似性マッチングを実施させ、
― 前記クロススケール自己相似性マッチングの結果を用いて、アップスケーリングされた出力イメージを生成させる。
− 前記入力イメージ及び1つ以上の補助入力イメージのために、一貫性のあるスーパーピクセルを生成させ、
− 前記一貫性のあるスーパーピクセルに基づきスーパーピクセルテストベクトルを生成させ、
− 前記スーパーピクセルテストベクトルを用いて前記入力イメージ及び前記1つ以上の補助入力イメージに対してクロススケール自己相似性マッチングを実施させ、
― 前記クロススケール自己相似性マッチングの結果を用いて、アップスケーリングされた出力イメージを生成させる。
また、一実施形態において、入力イメージをアップスケーリングするよう構成される装置であって、スーパーピクセルを使用したクロススケール自己相似性マッチングが、アップスケーリングされたイメージにおける不足しているディテールを代用するものを得るために用いられる、前記装置は:
− 前記入力イメージ及び1つ以上の補助入力イメージのために、一貫性のあるスーパーピクセルを生成し、該一貫性のあるスーパーピクセルに基づきスーパーピクセルテストベクトルを生成するよう構成されるスーパーピクセルベクトル生成部と、
− 前記スーパーピクセルテストベクトルを用いて前記入力イメージ及び前記1つ以上の補助入力イメージに対してクロススケール自己相似性マッチングを実施するよう構成されるマッチングブロックと、
− 前記クロススケール自己相似性マッチングの結果を用いて、アップスケーリングされた出力イメージを生成するよう構成される出力イメージ生成部と
を有する。
− 前記入力イメージ及び1つ以上の補助入力イメージのために、一貫性のあるスーパーピクセルを生成し、該一貫性のあるスーパーピクセルに基づきスーパーピクセルテストベクトルを生成するよう構成されるスーパーピクセルベクトル生成部と、
− 前記スーパーピクセルテストベクトルを用いて前記入力イメージ及び前記1つ以上の補助入力イメージに対してクロススケール自己相似性マッチングを実施するよう構成されるマッチングブロックと、
− 前記クロススケール自己相似性マッチングの結果を用いて、アップスケーリングされた出力イメージを生成するよう構成される出力イメージ生成部と
を有する。
他の実施形態において、入力イメージをアップスケーリングするよう構成される装置であって、スーパーピクセルを使用したクロススケール自己相似性マッチングが、アップスケーリングされたイメージにおける不足しているディテールを代用するものを得るために用いられる、前記装置は、プロセッシングデバイス及びメモリデバイスを有し、前記メモリデバイスには、前記プロセッシングデバイスによって実行される場合に、当該装置に:
− 前記入力イメージ及び1つ以上の補助入力イメージのために、一貫性のあるスーパーピクセルを生成させ、
− 前記一貫性のあるスーパーピクセルに基づきスーパーピクセルテストベクトルを生成させ、
− 前記スーパーピクセルテストベクトルを用いて前記入力イメージ及び前記1つ以上の補助入力イメージに対してクロススケール自己相似性マッチングを実施させ、
− 前記クロススケール自己相似性マッチングの結果を用いて、アップスケーリングされた出力イメージを生成させる
命令が記憶されている。
− 前記入力イメージ及び1つ以上の補助入力イメージのために、一貫性のあるスーパーピクセルを生成させ、
− 前記一貫性のあるスーパーピクセルに基づきスーパーピクセルテストベクトルを生成させ、
− 前記スーパーピクセルテストベクトルを用いて前記入力イメージ及び前記1つ以上の補助入力イメージに対してクロススケール自己相似性マッチングを実施させ、
− 前記クロススケール自己相似性マッチングの結果を用いて、アップスケーリングされた出力イメージを生成させる
命令が記憶されている。
提案されている超解像度方法は、生成された時間的又は多視点的な一貫性があるスーパーピクセルを解析することによって、捕捉されたオブジェクトを追跡する。イメージ素材におけるオブジェクト、及び時間における又は異なったビューにおけるそれらの所在、に関する認識は、関連するマルチイメージのクロススケール自己相似性を見つけるために、アドバンストサーチストラテジへ渡される。異なる時間フェーズ又は異なるビューについて見つけられた複数の有意な自己相似性を組み込むことによって、より適切な超解像度エンハンスメント信号が生成され、改善されたピクチャ品質をもたらす。提案されている超解像度アプローチは、グランドトルス(ground truth)データとの比較によってピーク信号対雑音比において測定され得るイメージ品質の改善を提供する。加えて、主観テスト(subjective testing)は、結果として現れるピクチャ品質の視覚的改善を確かめる。これは、ピーク信号対雑音比の計測が人間の視覚認知と必ずしも一致しないので、有用である。
超解像度アプローチは複数のイメージに作用する。複数のイメージは、時間におけるイメージシーケンス(例えば、ビデオ)、マルチビューショット(例えば、複数の角度を保持するライトフィールドカメライメージ)、又はマルチビューショットの時間シーケンスにさえ相当してよい。それらの適用は交換可能であり、このことは、マルチビューイメージ及び時間イメージが同等物として扱われ得ることを意味する。
一実施形態において、解決法は:
− 高解像低周波イメージを得るよう入力イメージをアップスケーリングすることと、
− 前記入力イメージと前記高解像低周波イメージとの間、及び1つ以上の補助入力イメージと前記高解像低周波イメージとの間で、一致位置を特定することと、
− 前記一致位置を用いて、前記入力イメージ及び前記1つ以上の補助入力イメージから、高解像高周波合成イメージを構成することと、
前記高解像低周波イメージ及び前記高解像高周波合成イメージを高解像のアップスケーリングされた出力イメージへと結合することと
を有する。通常、アップスケーリングされたイメージは、不足しているディテールにより悲惨な品質低下を有している。しかし、それら不足しているディテールは、入力イメージ及び1つ以上の補助入力イメージからのイメージブロックを用いて置き換えられる。それらのイメージは、限られた数の適切なイメージブロックしか含まないが、それらのブロックは、一般的に、より関連性がある(すなわち、より良く適合する)。
− 高解像低周波イメージを得るよう入力イメージをアップスケーリングすることと、
− 前記入力イメージと前記高解像低周波イメージとの間、及び1つ以上の補助入力イメージと前記高解像低周波イメージとの間で、一致位置を特定することと、
− 前記一致位置を用いて、前記入力イメージ及び前記1つ以上の補助入力イメージから、高解像高周波合成イメージを構成することと、
前記高解像低周波イメージ及び前記高解像高周波合成イメージを高解像のアップスケーリングされた出力イメージへと結合することと
を有する。通常、アップスケーリングされたイメージは、不足しているディテールにより悲惨な品質低下を有している。しかし、それら不足しているディテールは、入力イメージ及び1つ以上の補助入力イメージからのイメージブロックを用いて置き換えられる。それらのイメージは、限られた数の適切なイメージブロックしか含まないが、それらのブロックは、一般的に、より関連性がある(すなわち、より良く適合する)。
一実施形態において、前記入力イメージは、低解像低周波イメージ及び低解像高周波イメージに分けられたバンドであり、前記低解像低周波イメージは、前記クロススケール自己相似性マッチングのために使用され、前記低解像高周波イメージは、前記アップスケーリングされた出力イメージを生成するために使用される。このようにして、自己相似性の効率的な解析は確かにされ、アップスケーリングされた出力イメージのための必要な高周波ディテールは確実に取得され得る。
一実施形態において、前記アップスケーリングされた出力イメージを生成するイメージブロックは、前記クロススケール自己相似性マッチングの最良の一致によって定義される単一のイメージブロックを選択すること、前記クロススケール自己相似性マッチングの一致によって定義されるブロックの全て又は一部の線形結合を生成すること、及び前記クロススケール自己相似性マッチングの一致によって定義される全てのイメージブロックにわたる平均を生成すること、のうちの少なくとも1つを実施することによって、生成される。最初の2つの解決法は、必要とされるプロセッシングパワーがより小さくて済み、一方、最後の解決法は、ピーク信号対雑音比について最良の結果を示す。
より良い理解のために、解決法は、これより、図を参照して以下の記載において更に詳細に説明される。解決法は、この例となる実施形態に制限されないこと、及び特定の特徴は、添付の特許請求の範囲において定義されている本解決法の適用範囲から逸脱することなしに、便宜上結合及び/又は変更されてもよいこと、が理解される。
以下で、解決法は、時間的なイメージシーケンス、例えば、ビデオシーケンスのイメージ、に重きを置いて説明される。しかし、記載されているアプローチは、空間的に関連するイメージ、例えば、マルチビューイメージ、に同様に適用可能である。
以下で記載されているアプローチは、図1のブロック図によって示されるような、G. Freedman et al.(非特許文献1)による超解像度アルゴリズムに基づく。当然、一般的な考えは、他の超解像度アルゴリズムに同様に適用可能である。簡単のために、ブロック図は、単一のイメージのみに有効である解決法について記載するが、提案されているアプローチは、複数のイメージのための解決法を提供する。全ての対応する必要な拡張は、別のブロック図において後で説明される。
図1において、低解像度の入力イメージI1は、3つの異なるフィルタ、すなわち、低周波高解像イメージO1.1を生成するアップサンプリングフィルタ1、低周波低解像イメージI1.1を生成するローパスフィルタ2、及び高周波低解像イメージI1.2を生成するハイパスフィルタ3、によって処理される。
通常、アップサンプリングされたイメージO1.1は、バイキュービック(bi-cubic)又は代替的により複雑なアップスケーリングによって引き起こされるディテールの欠如に起因して、悲惨な品質低下を有している。以降のステップでは、それらの不足しているディテールを代用するものが、自然オブジェクトの固有のクロススケール自己相似性を利用することによって、生成される。不足しているディテールを生成するプロセスは、高周波高解像イメージO1.2をもたらす。高周波高解像イメージO1.2は、最終的な高解像出力イメージO1を生成するよう、処理ブロック4で低周波高解像イメージO1.1と結合され得る。
クロススケール自己相似性は、マッチングプロセスブロック5によって検出される。このマッチングプロセスブロック5は、高解像イメージO1.1における全てのピクセルについて、低解像イメージI1.1内の適切な一致を探す。マッチングプロセスの最先端は、長方形の探索窓の一定の拡張範囲内を探すことである。マッチングプロセスブロック5は、I1.1を指し示しているO1.1における全てのピクセルについて最良の一致位置を生成する。それら最良の一致位置は、合成ブロック6へ渡される。合成ブロック6は、示されているブロックを、高周波低解像イメージI1.2から高周波高解像ブロックO1.2にコピーする。
図2におけるブロック図は、図1のブロック図のよりコンパクトなバージョンを示し、アドバンストマッチング技術によって拡張されている。図2における追加のブロックは、スーパーピクセルベクトル生成部7である。スーパーピクセルベクトル生成部7は、スーパーピクセルを計算するために入力イメージI1を処理し、且つ、マッチングブロック5のために使用されるテストベクトルを選択する。スーパーピクセルのテストベクトル生成は、図1において使用された矩形の探索窓に取って代わる。
図3におけるブロック図は、スーパーピクセルベクトル生成の更なる拡張、すなわち、スーパーピクセルを使用した超解像マルチイメージ自己相似性マッチング、を説明する。図2におけるその先行物として、図3のブロック図は、イメージ素材におけるオブジェクトに気付いている。考えは、オブジェクトが複数のイメージにわたって追跡されることであり、オブジェクトは、ベクトル生成ブロック7において複数の入力イメージにわたるマッチングのためのテストベクトルを生成するのに役立つ。図3において、入力イメージの数は3であるが、この数は強制的ではなく、将来又は過去の方向において位置するイメージを含めること又は除くことによって増減され得る。同様に、マルチビューアプリケーションは、更なるビュー/角度を含めること又は除くことができ、あるいは、マルチビューイメージの時間シーケンスは、更なるビュー/角度及び/又は時間的に後若しくは先に起こるイメージを含めること又は除くことができる。
図3で与えられている例は、時間ttで出力イメージO2を更に生成するために時間ttでのイメージI2に対して実行される、提案されている方法を示す。時間tt−1及びtt+1での入力イメージI1及びI3は、出力イメージO2のために、関連するクロススケール自己相似性を見つけるための追加ソースである。
マッチングブロック5は、全ての入力イメージについてのスーパーピクセルテストベクトル(この例では、{vt−1,vt,vt+1}である。)を受け取り、I1.1、I2.1及びI3.1を夫々指し示しているO2.1における全てのピクセルについて最良の一致位置を生成する。図中、これは、最良の一致位置の3つの完全なセットを表す{pt−1,pt、pt+1}によって示されている。通常、セットの次元は、入力イメージの数に等しい。合成ブロック6は、I1.2、I2.2及びI3.2からの示されているブロックを結合し、結合結果を高周波高解像イメージO2.2にコピーする。
以下で、ベクトル生成ブロック7及び合成ブロック6のより詳細な記載が与えられる。
マルチイメージスーパーピクセルベクトル生成ブロック7は、次のステップを実施することによって、スーパーピクセルテストベクトルセット{vt−1,vt,vt+1}を生成する:
ステップ1:一貫性のあるスーパーピクセル{SPt−1(m),SPt(n),SPt+1(r)}を生成する。インデックス{m,n,r}は、イメージ内の全てのスーパーピクセルの範囲を走る。語「時間的に一貫性のある(temporally consistent)」は、マルチビューアプリケーションにとって一貫性のあるマルチビューにより置き換えられ得る。時間的に一貫性のあるスーパーピクセルを生成するアプローチは、非特許文献5において記載されている。図5は、図6に表されているスーパーピクセルエリアに分けられるイメージの例を示す。図6において、各スーパーピクセルは、異なるグレー値(grey value)を用いて表されている。図6は、スーパーピクセルラベルマップと呼ばれる。図7は、3つのイメージの期間にわたって追跡される単一の時間的に一貫性のあるスーパーピクセルの例を示す。スーパーピクセルは、時間tt−1、tt及びtt+1でのイメージにおいて表されるビデオシーンにおける移動オブジェクトに追随する。
ステップ1:一貫性のあるスーパーピクセル{SPt−1(m),SPt(n),SPt+1(r)}を生成する。インデックス{m,n,r}は、イメージ内の全てのスーパーピクセルの範囲を走る。語「時間的に一貫性のある(temporally consistent)」は、マルチビューアプリケーションにとって一貫性のあるマルチビューにより置き換えられ得る。時間的に一貫性のあるスーパーピクセルを生成するアプローチは、非特許文献5において記載されている。図5は、図6に表されているスーパーピクセルエリアに分けられるイメージの例を示す。図6において、各スーパーピクセルは、異なるグレー値(grey value)を用いて表されている。図6は、スーパーピクセルラベルマップと呼ばれる。図7は、3つのイメージの期間にわたって追跡される単一の時間的に一貫性のあるスーパーピクセルの例を示す。スーパーピクセルは、時間tt−1、tt及びtt+1でのイメージにおいて表されるビデオシーンにおける移動オブジェクトに追随する。
ステップ2:全てのスーパーピクセルイメージについて別々に検索ベクトル{st−1(ζ),st(ζ),st+1(ζ)}を生成する。インデックスζは、全てのイメージ位置にわたって走る。そのような検索ベクトルを生成する1つのアプローチは、例えば、同時係属の欧州特許出願第14306130号において記載されている。
ステップ3:全てのスーパーピクセルについて、オブジェクトに関連したピクセル割り当てを生成する:
SPt → SPt+1 SPt → SPt−1
SPt → SPt+2 及び SPt → SPt−2,
・・・ → ・・・ ・・・ → ・・・
なお、関連の数は、入力イメージの数に依存する。そのようなオブジェクトに関連したピクセル割り当てを生成する1つのアプローチは、例えば、同時係属の欧州特許出願第14306126号において記載されている。図3における例では、本当に最初のラインのみが使用されている。
SPt → SPt+1 SPt → SPt−1
SPt → SPt+2 及び SPt → SPt−2,
・・・ → ・・・ ・・・ → ・・・
なお、関連の数は、入力イメージの数に依存する。そのようなオブジェクトに関連したピクセル割り当てを生成する1つのアプローチは、例えば、同時係属の欧州特許出願第14306126号において記載されている。図3における例では、本当に最初のラインのみが使用されている。
ステップ4:最終的なスーパーピクセルテストベクトル{vt−1,vt,vt+1}が、ステップ3で見つけられたピクセル割り当てを適用することによって決定される。図3における例に関して、時間ttでのイメージにおける夫々の別個のスーパーピクセルSPt(n)≡SPt,nは、SPt−1(m)≡SPt−1,mへのピクセル個別割り当て、及びSPt+1(r)≡SPt+1,rへのピクセル個別割り当てを有しており、それらは、i∈{1,・・・I}、j∈{1,・・・J}及びk∈{1,・・・K}として、pt,n(i)→pt−1,m(j)及びpt,n(i)→pt+1,r(k)によって表され得る。言い換えれば、時間ttでのイメージにおける原スーパーピクセルSPt,nに位置する夫々のピクセルpt,n(i)について、対応するピクセルpt−1,m(j)及びpt+1,r(k)が必要とされ、それらは、時間tt−1でのイメージにおけるSPt−1,m及び時間tt+1でのイメージにおけるSPt+1,r内に位置する。Iは、SPt,nに含まれるピクセルの数であり、Jは、SPt−1,mに含まれるピクセルの数であり、Kは、SPt+1,rに含まれるピクセルの数である。一般に、ピクセルの数I、J及びKは異なる。そのため、結果として現れるピクセルマッピングは、一対多、一対一、多対一、及びそれらの組み合わせであることができる。テストベクトルvtは、それらが直接に取り込まれ得るので、割り当てを必要としない。すなわち、vt(ζ)=st(ζ)。テストベクトルvt−1及びvt+1は、夫々、vt−1(ζ)=st−1(pt,n(ζ)→pt−1,m(ζ))及びvt+1(ζ)=st+1(pt,n(ζ)→pt+1,r(ζ))に従う割り当てを使用する。より多数の入力イメージは然るべく扱われる。
合成ブロック6によって実施されるブロック結合は、例えば、次のアプローチのうちの1つを用いて、実施され得る:
a)最善の一致、すなわち、見つけられた全ての最良の一致の中でも最も良いもの、によってのみ定義される単一ブロックの選択。
a)最善の一致、すなわち、見つけられた全ての最良の一致の中でも最も良いもの、によってのみ定義される単一ブロックの選択。
b)ブロックの全て又は一部の線形結合。重み(線形係数)は、図4に示されるように、線形回帰(linear regression)により決定される。
c)見つけられた全ての最良の一致にわたる平均を生成する。このアプローチは、それがPSNR(ピーク信号対雑音比;Peak Signal-to-Nose Ratio)について最良の結果を示すので、好ましい。
図4は、合成ブロック6内で実行される、高周波高解像イメージO2.2を構成するための線形回帰アプローチを示す。線形回帰は、最良の一致位置{pt−1,pt,pt+1}を取り、回帰方程式
[外1]
 を形成することで最良一致ブロックデータ
を形成することで最良一致ブロックデータ
[外2]
を及び対象ブロック
[外3]
をフェッチすることによって、O2.1における各ピクセル位置ζについて個々に処理される。このとき、qは、マッチングブロックにおけるピクセルの数である。この方程式は、入力イメージの数がマッチングブロックにおけるピクセルの数以下である場合に、解くことができる。入力イメージの数がより多い場合には、それは、最も良く一致するブロック、すなわち、最小距離測度を有するブロック、を選択することによって、行列Dの水平次元を減らすよう処理される。
[外1]
[外2]
[外3]
図8及び9における2つのグラフは、アップスケーリングされたイメージをグランドトルスデータと比較することによって64個のイメージのシーケンスにわたって解析された平均PSNR及びSSIM(構造類似性;Structural SIMilarity)を示す。次のアルゴリズムの間の比較が示されている:
バイキュービック:バイキュービック補間によるアップスケーリング。
バイキュービック:バイキュービック補間によるアップスケーリング。
SISR:シングルイメージ超解像度(Single Image Super Resolution)。マッチングプロセスは、長方形の探索窓の一定の拡張範囲内を探す。
SRm25:ベクトルに基づく自己相似性マッチングを使用するシングルイメージ超解像度。検索ベクトル長さが25である。
SRuSPt1:項目c)において上述されたように平均化することによって3つのイメージ{tt−1,tt,t+1}(すなわち、1つは前のイメージであり、1つは将来のイメージである。)にわたるスーパーピクセルを使用するマルチイメージ自己相似性マッチング。
SRuSPt5:項目c)において上述されたように平均化することによって11個のイメージ{tt−5,・・・,tt−1,tt,tt+1,・・・,tt+5}(すなわち、5つは前のイメージであり、5つは将来のイメージである。)にわたるスーパーピクセルを使用するマルチイメージ自己相似性マッチング。
SRuSPt1s:項目a)において上述されたように最も良く一致するブロックを選択しながら、3つのイメージ{tt−1,tt,t+1}(すなわち、1つは前のイメージであり、1つは将来のイメージである。)にわたるスーパーピクセルを使用するマルチイメージ自己相似性マッチング。
SRuSPt5s:項目a)において上述されたように最も良く一致するブロックを選択しながら、11個のイメージ{tt−5,・・・,tt−1,tt,tt+1,・・・,tt+5}(すなわち、5つは前のイメージであり、5つは将来のイメージである。)にわたるスーパーピクセルを使用するマルチイメージ自己相似性マッチング。
2つのグラフは、スーパーピクセルにより制御された自己相似性マッチングを使用する全ての方法が一定の探索エリア内のマッチングより優れていることを示す。それらはまた、入力イメージの増大がPSNR及びSSIM値の改善をもたらすことを明らかにする。最後に、11個の入力イメージを解析するSRuSPt5アルゴリズムは、優れたPSNR及びSSIM値をもたらすことが分かる。
図10は、イメージをアップスケーリングする方法の一実施形態を概略的に表す。この方法において、スーパーピクセルを使用したクロススケール自己相似性マッチングは、アップスケーリングされたイメージにおける不足しているディテールを代用するものを得るために用いられる。第1のステップで、一貫性のあるスーパーピクセルが、入力イメージI2及び1つ以上の補助入力イメージI1、I3について生成される(10)。そのような一貫性のあるスーパーピクセルに基づき、次いで、スーパーピクセルテストベクトルが生成される(11)。スーパーピクセルテストベクトルを用いて、クロススケール自己相似性マッチング(12)が、入力イメージI2及び1つ以上の補助入力イメージI1、I3に対して実施される。最後に、アップスケーリングされた出力イメージO2が、クロススケール自己相似性マッチング(12)の結果を用いて生成される(13)。
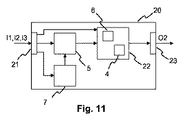
図11は、入力イメージI2をアップスケーリングする装置20の一実施形態を表す。装置20は、アップスケーリングされたイメージにおける不足しているディテールを代用するものを得るために、スーパーピクセルを使用したクロススケール自己相似性マッチングを用いる。このために、装置20は、アップスケーリングされる入力イメージI2、及び1つ以上の補助入力イメージI1、I3を受ける入力部21を有する。スーパーピクセルベクトル生成部7は、入力イメージI2及び1つ以上の補助入力イメージI1、I2のために、一貫性のあるスーパーピクセルを生成し(10)、更には、一貫性のあるスーパーピクセルに基づき、スーパーピクセルテストベクトルを生成する(11)。当然、それら2つの機能は、別個の処理ブロックによって同様に実施されてよい。マッチングブロック5は、スーパーピクセルテストベクトルを用いて、入力イメージI2及び1つ以上の補助入力イメージI1、I3に対してクロススケール自己相似性マッチング(12)を行う。出力イメージ生成部22は、クロススケール自己相似性マッチング(12)の結果を用いて、アップスケーリングされた出力イメージO2を生成する(13)。一実施形態において、出力イメージ生成部22は、先に更に記載されたように、合成ブロック6及び処理ブロック4を有する。結果として現れる出力イメージO2は、出力部23で利用可能にされ、且つ/あるいは、ローカルストレージに格納される。スーパーピクセルベクトル生成部7、マッチングブロック5、及び出力イメージ生成部22は、専用のハードウェアとして、又はプロセッサで実行されるソフトウェアとして、実装される。それらはまた、部分的に又は完全に、単一ユニットにおいて結合されてよい。また、入力部21及び出力部23は、単一の双方向インターフェイスにまとめられてよい。
イメージをアップスケーリングする方法を実施するよう構成された装置30の他の実施形態は、図12において概略的に表されている。装置30は、プロセッシングデバイス31と、実行される場合に、記載されている方法の1つに従うステップを装置に実施させる命令を記憶しているメモリデバイス32とを有する。
例えば、プロセッシングデバイス31は、記載されている方法の1つに従うステップを実施するよう適応されたプロセッサであることができる。実施形態において、前記の適応は、プロセッサが、記載されている方法の1つに従うステップを実施するよう構成(例えば、プログラム)されることを有する。
ステップ2:全てのスーパーピクセルイメージについて別々に検索ベクトル{st−1(ζ),st(ζ),st+1(ζ)}を生成する。インデックスζは、全てのイメージ位置にわたって走る。そのような検索ベクトルを生成する1つのアプローチは、例えば、同時係属の欧州特許出願第14306130号(欧州特許出願公開第2966613(A1)号として公開)において記載されている。
ステップ3:全てのスーパーピクセルについて、オブジェクトに関連したピクセル割り当てを生成する:
SPt → SPt+1 SPt → SPt−1
SPt → SPt+2 及び SPt → SPt−2,
・・・ → ・・・ ・・・ → ・・・
なお、関連の数は、入力イメージの数に依存する。そのようなオブジェクトに関連したピクセル割り当てを生成する1つのアプローチは、例えば、同時係属の欧州特許出願第14306126号(欧州特許出願公開第2966616(A1)号に対応)において記載されている。図3における例では、本当に最初のラインのみが使用されている。
SPt → SPt+1 SPt → SPt−1
SPt → SPt+2 及び SPt → SPt−2,
・・・ → ・・・ ・・・ → ・・・
なお、関連の数は、入力イメージの数に依存する。そのようなオブジェクトに関連したピクセル割り当てを生成する1つのアプローチは、例えば、同時係属の欧州特許出願第14306126号(欧州特許出願公開第2966616(A1)号に対応)において記載されている。図3における例では、本当に最初のラインのみが使用されている。
例えば、プロセッシングデバイス31は、記載されている方法の1つに従うステップを実施するよう適応されたプロセッサであることができる。実施形態において、前記の適応は、プロセッサが、記載されている方法の1つに従うステップを実施するよう構成(例えば、プログラム)されることを有する。
上記の実施形態に加えて、以下の付記を開示する。
[付記1]
入力イメージ(I2)をアップスケーリングする方法であって、スーパーピクセルを使用したクロススケール自己相似性マッチングが、アップスケーリングされたイメージにおける不足しているディテールを代用するものを得るために用いられる、前記方法において、
前記入力イメージ(I2)及び1つ以上の補助入力イメージ(I1,I3)のために、一貫性のあるスーパーピクセルを生成すること(10)と、
前記一貫性のあるスーパーピクセルに基づきスーパーピクセルテストベクトルを生成すること(11)と、
前記スーパーピクセルテストベクトルを用いて前記入力イメージ(I2)及び前記1つ以上の補助入力イメージ(I1,I3)に対してクロススケール自己相似性マッチング(12)を実施することと、
前記クロススケール自己相似性マッチング(12)の結果を用いて、アップスケーリングされた出力イメージ(O2)を生成すること(13)と
を有する、ことを特徴とする方法。
[付記2]
高解像低周波イメージ(O2.1)を得るよう前記入力イメージ(I2)をアップスケーリングすることと、
前記入力イメージ(I2)と前記高解像低周波イメージ(O2.1)との間、及び前記1つ以上の補助入力イメージ(I1,I3)と前記高解像低周波イメージ(O2.1)との間で、一致位置を特定することと、
前記一致位置を用いて、前記入力イメージ(I2)及び前記1つ以上の補助入力イメージ(I1,I3)から、高解像高周波合成イメージ(O2.2)を構成することと、
前記高解像低周波イメージ(O2.1)及び前記高解像高周波合成イメージ(O2.2)を高解像のアップスケーリングされた出力イメージ(O2)へと結合することと
を有する付記1に記載の方法。
[付記3]
前記入力イメージ(I2)及び前記1つ以上の補助入力イメージ(I1,I3)は、一連のイメージの中の連続したイメージ、又はシーンのマルチビューイメージである、
付記1又は2に記載の方法。
[付記4]
前記入力イメージ(I1,I2,I3)は、低解像低周波イメージ(I1.1,I2.1,I3.1)及び低解像高周波イメージ(I1.2,I2.2,I3.2)に分けられたバンドであり、
前記低解像低周波イメージ(I1.1,I2.1,I3.1)は、前記クロススケール自己相似性マッチングのために使用され、前記低解像高周波イメージ(I1.2,I2.2,I3.2)は、前記アップスケーリングされた出力イメージを生成するために使用される、
付記1乃至3のうちいずれか一つに記載の方法。
[付記5]
前記アップスケーリングされた出力イメージ(O2)を生成(13)するイメージブロックは、
前記クロススケール自己相似性マッチング(12)の最良の一致によって定義される単一のイメージブロックを選択すること、
前記クロススケール自己相似性マッチング(12)の一致によって定義されるブロックの全て又は一部の線形結合を生成すること、及び
前記クロススケール自己相似性マッチング(12)の一致によって定義される全てのイメージブロックにわたる平均を生成すること
のうちの少なくとも1つを実施することによって、生成される、
付記1乃至4のうちいずれか一つに記載の方法。
[付記6]
入力イメージ(I2)をアップスケーリングすることを可能にする命令を記憶しているコンピュータ可読記憶媒体であって、スーパーピクセルを使用したクロススケール自己相似性マッチングが、アップスケーリングされたイメージにおける不足しているディテールを代用するものを得るために用いられる、前記コンピュータ可読記憶媒体において、
前記命令は、コンピュータによって実行される場合に、該コンピュータに、
前記入力イメージ(I2)及び1つ以上の補助入力イメージ(I1,I3)のために、一貫性のあるスーパーピクセルを生成させ(10)、
前記一貫性のあるスーパーピクセルに基づきスーパーピクセルテストベクトルを生成させ(11)、
前記スーパーピクセルテストベクトルを用いて前記入力イメージ(I2)及び前記1つ以上の補助入力イメージ(I1,I3)に対してクロススケール自己相似性マッチング(12)を実施させ、
前記クロススケール自己相似性マッチング(12)の結果を用いて、アップスケーリングされた出力イメージ(O2)を生成させる(13)、
コンピュータ可読記憶媒体。
[付記7]
入力イメージ(I2)をアップスケーリングするよう構成される装置(20)であって、スーパーピクセルを使用したクロススケール自己相似性マッチングが、アップスケーリングされたイメージにおける不足しているディテールを代用するものを得るために用いられる、前記装置(20)において、
前記入力イメージ(I2)及び1つ以上の補助入力イメージ(I1,I3)のために、一貫性のあるスーパーピクセルを生成し(10)、該一貫性のあるスーパーピクセルに基づきスーパーピクセルテストベクトルを生成する(11)よう構成されるスーパーピクセルベクトル生成部(7)と、
前記スーパーピクセルテストベクトルを用いて前記入力イメージ(I2)及び前記1つ以上の補助入力イメージ(I1,I3)に対してクロススケール自己相似性マッチング(12)を実施するよう構成されるマッチングブロック(5)と、
前記クロススケール自己相似性マッチング(12)の結果を用いて、アップスケーリングされた出力イメージ(O2)を生成する(13)よう構成される出力イメージ生成部(22)と
を有する装置(20)。
[付記8]
入力イメージ(I2)をアップスケーリングするよう構成される装置(30)であって、スーパーピクセルを使用したクロススケール自己相似性マッチングが、アップスケーリングされたイメージにおける不足しているディテールを代用するものを得るために用いられる、前記装置(30)において、
プロセッシングデバイス(31)及びメモリデバイス(32)を有し、
前記メモリデバイス(32)には、
前記プロセッシングデバイス(31)によって実行される場合に、当該装置(30)に、
前記入力イメージ(I2)及び1つ以上の補助入力イメージのために、一貫性のあるスーパーピクセルを生成させ(10)、
前記一貫性のあるスーパーピクセルに基づきスーパーピクセルテストベクトルを生成させ(11)、
前記スーパーピクセルテストベクトルを用いて前記入力イメージ(I2)及び前記1つ以上の補助入力イメージ(I1,I3)に対してクロススケール自己相似性マッチング(12)を実施させ、
前記クロススケール自己相似性マッチング(12)の結果を用いて、アップスケーリングされた出力イメージ(O2)を生成させる(13)
命令が記憶されている、装置(30)。
上記の実施形態に加えて、以下の付記を開示する。
[付記1]
入力イメージ(I2)をアップスケーリングする方法であって、スーパーピクセルを使用したクロススケール自己相似性マッチングが、アップスケーリングされたイメージにおける不足しているディテールを代用するものを得るために用いられる、前記方法において、
前記入力イメージ(I2)及び1つ以上の補助入力イメージ(I1,I3)のために、一貫性のあるスーパーピクセルを生成すること(10)と、
前記一貫性のあるスーパーピクセルに基づきスーパーピクセルテストベクトルを生成すること(11)と、
前記スーパーピクセルテストベクトルを用いて前記入力イメージ(I2)及び前記1つ以上の補助入力イメージ(I1,I3)に対してクロススケール自己相似性マッチング(12)を実施することと、
前記クロススケール自己相似性マッチング(12)の結果を用いて、アップスケーリングされた出力イメージ(O2)を生成すること(13)と
を有する、ことを特徴とする方法。
[付記2]
高解像低周波イメージ(O2.1)を得るよう前記入力イメージ(I2)をアップスケーリングすることと、
前記入力イメージ(I2)と前記高解像低周波イメージ(O2.1)との間、及び前記1つ以上の補助入力イメージ(I1,I3)と前記高解像低周波イメージ(O2.1)との間で、一致位置を特定することと、
前記一致位置を用いて、前記入力イメージ(I2)及び前記1つ以上の補助入力イメージ(I1,I3)から、高解像高周波合成イメージ(O2.2)を構成することと、
前記高解像低周波イメージ(O2.1)及び前記高解像高周波合成イメージ(O2.2)を高解像のアップスケーリングされた出力イメージ(O2)へと結合することと
を有する付記1に記載の方法。
[付記3]
前記入力イメージ(I2)及び前記1つ以上の補助入力イメージ(I1,I3)は、一連のイメージの中の連続したイメージ、又はシーンのマルチビューイメージである、
付記1又は2に記載の方法。
[付記4]
前記入力イメージ(I1,I2,I3)は、低解像低周波イメージ(I1.1,I2.1,I3.1)及び低解像高周波イメージ(I1.2,I2.2,I3.2)に分けられたバンドであり、
前記低解像低周波イメージ(I1.1,I2.1,I3.1)は、前記クロススケール自己相似性マッチングのために使用され、前記低解像高周波イメージ(I1.2,I2.2,I3.2)は、前記アップスケーリングされた出力イメージを生成するために使用される、
付記1乃至3のうちいずれか一つに記載の方法。
[付記5]
前記アップスケーリングされた出力イメージ(O2)を生成(13)するイメージブロックは、
前記クロススケール自己相似性マッチング(12)の最良の一致によって定義される単一のイメージブロックを選択すること、
前記クロススケール自己相似性マッチング(12)の一致によって定義されるブロックの全て又は一部の線形結合を生成すること、及び
前記クロススケール自己相似性マッチング(12)の一致によって定義される全てのイメージブロックにわたる平均を生成すること
のうちの少なくとも1つを実施することによって、生成される、
付記1乃至4のうちいずれか一つに記載の方法。
[付記6]
入力イメージ(I2)をアップスケーリングすることを可能にする命令を記憶しているコンピュータ可読記憶媒体であって、スーパーピクセルを使用したクロススケール自己相似性マッチングが、アップスケーリングされたイメージにおける不足しているディテールを代用するものを得るために用いられる、前記コンピュータ可読記憶媒体において、
前記命令は、コンピュータによって実行される場合に、該コンピュータに、
前記入力イメージ(I2)及び1つ以上の補助入力イメージ(I1,I3)のために、一貫性のあるスーパーピクセルを生成させ(10)、
前記一貫性のあるスーパーピクセルに基づきスーパーピクセルテストベクトルを生成させ(11)、
前記スーパーピクセルテストベクトルを用いて前記入力イメージ(I2)及び前記1つ以上の補助入力イメージ(I1,I3)に対してクロススケール自己相似性マッチング(12)を実施させ、
前記クロススケール自己相似性マッチング(12)の結果を用いて、アップスケーリングされた出力イメージ(O2)を生成させる(13)、
コンピュータ可読記憶媒体。
[付記7]
入力イメージ(I2)をアップスケーリングするよう構成される装置(20)であって、スーパーピクセルを使用したクロススケール自己相似性マッチングが、アップスケーリングされたイメージにおける不足しているディテールを代用するものを得るために用いられる、前記装置(20)において、
前記入力イメージ(I2)及び1つ以上の補助入力イメージ(I1,I3)のために、一貫性のあるスーパーピクセルを生成し(10)、該一貫性のあるスーパーピクセルに基づきスーパーピクセルテストベクトルを生成する(11)よう構成されるスーパーピクセルベクトル生成部(7)と、
前記スーパーピクセルテストベクトルを用いて前記入力イメージ(I2)及び前記1つ以上の補助入力イメージ(I1,I3)に対してクロススケール自己相似性マッチング(12)を実施するよう構成されるマッチングブロック(5)と、
前記クロススケール自己相似性マッチング(12)の結果を用いて、アップスケーリングされた出力イメージ(O2)を生成する(13)よう構成される出力イメージ生成部(22)と
を有する装置(20)。
[付記8]
入力イメージ(I2)をアップスケーリングするよう構成される装置(30)であって、スーパーピクセルを使用したクロススケール自己相似性マッチングが、アップスケーリングされたイメージにおける不足しているディテールを代用するものを得るために用いられる、前記装置(30)において、
プロセッシングデバイス(31)及びメモリデバイス(32)を有し、
前記メモリデバイス(32)には、
前記プロセッシングデバイス(31)によって実行される場合に、当該装置(30)に、
前記入力イメージ(I2)及び1つ以上の補助入力イメージのために、一貫性のあるスーパーピクセルを生成させ(10)、
前記一貫性のあるスーパーピクセルに基づきスーパーピクセルテストベクトルを生成させ(11)、
前記スーパーピクセルテストベクトルを用いて前記入力イメージ(I2)及び前記1つ以上の補助入力イメージ(I1,I3)に対してクロススケール自己相似性マッチング(12)を実施させ、
前記クロススケール自己相似性マッチング(12)の結果を用いて、アップスケーリングされた出力イメージ(O2)を生成させる(13)
命令が記憶されている、装置(30)。
Claims (8)
- 入力イメージをアップスケーリングする方法であって、スーパーピクセルを使用したクロススケール自己相似性マッチングが、アップスケーリングされたイメージにおける不足しているディテールを代用するものを得るために用いられる、前記方法において、
前記入力イメージ及び1つ以上の補助入力イメージのために、一貫性のあるスーパーピクセルを生成することと、
前記一貫性のあるスーパーピクセルに基づきスーパーピクセルテストベクトルを生成することと、
前記スーパーピクセルテストベクトルを用いて前記入力イメージ及び前記1つ以上の補助入力イメージに対してクロススケール自己相似性マッチングを実施することと、
前記クロススケール自己相似性マッチングの結果を用いて、アップスケーリングされた出力イメージを生成することと
を有する、ことを特徴とする方法。 - 高解像低周波イメージを得るよう前記入力イメージをアップスケーリングすることと、
前記入力イメージと前記高解像低周波イメージとの間、及び前記1つ以上の補助入力イメージと前記高解像低周波イメージとの間で、一致位置を特定することと、
前記一致位置を用いて、前記入力イメージ及び前記1つ以上の補助入力イメージから、高解像高周波合成イメージを構成することと、
前記高解像低周波イメージ及び前記高解像高周波合成イメージを高解像のアップスケーリングされた出力イメージへと結合することと
を有する請求項1に記載の方法。 - 前記入力イメージ及び前記1つ以上の補助入力イメージは、一連のイメージの中の連続したイメージ、又はシーンのマルチビューイメージである、
請求項1又は2に記載の方法。 - 前記入力イメージは、低解像低周波イメージ及び低解像高周波イメージに分けられたバンドであり、
前記低解像低周波イメージは、前記クロススケール自己相似性マッチングのために使用され、前記低解像高周波イメージは、前記アップスケーリングされた出力イメージを生成するために使用される、
請求項1乃至3のうちいずれか一項に記載の方法。 - 前記アップスケーリングされた出力イメージを生成するイメージブロックは、
前記クロススケール自己相似性マッチングの最良の一致によって定義される単一のイメージブロックを選択すること、
前記クロススケール自己相似性マッチングの一致によって定義されるブロックの全て又は一部の線形結合を生成すること、及び
前記クロススケール自己相似性マッチングの一致によって定義される全てのイメージブロックにわたる平均を生成すること
のうちの少なくとも1つを実施することによって、生成される、
請求項1乃至4のうちいずれか一項に記載の方法。 - 入力イメージをアップスケーリングすることを可能にする命令を記憶しているコンピュータ可読記憶媒体であって、スーパーピクセルを使用したクロススケール自己相似性マッチングが、アップスケーリングされたイメージにおける不足しているディテールを代用するものを得るために用いられる、前記コンピュータ可読記憶媒体において、
前記命令は、コンピュータによって実行される場合に、該コンピュータに、
前記入力イメージ及び1つ以上の補助入力イメージのために、一貫性のあるスーパーピクセルを生成させ、
前記一貫性のあるスーパーピクセルに基づきスーパーピクセルテストベクトルを生成させ、
前記スーパーピクセルテストベクトルを用いて前記入力イメージ及び前記1つ以上の補助入力イメージに対してクロススケール自己相似性マッチングを実施させ、
前記クロススケール自己相似性マッチングの結果を用いて、アップスケーリングされた出力イメージを生成させる、
コンピュータ可読記憶媒体。 - 入力イメージをアップスケーリングするよう構成される装置であって、スーパーピクセルを使用したクロススケール自己相似性マッチングが、アップスケーリングされたイメージにおける不足しているディテールを代用するものを得るために用いられる、前記装置において、
前記入力イメージ及び1つ以上の補助入力イメージのために、一貫性のあるスーパーピクセルを生成し、該一貫性のあるスーパーピクセルに基づきスーパーピクセルテストベクトルを生成するよう構成されるスーパーピクセルベクトル生成部と、
前記スーパーピクセルテストベクトルを用いて前記入力イメージ及び前記1つ以上の補助入力イメージに対してクロススケール自己相似性マッチングを実施するよう構成されるマッチングブロックと、
前記クロススケール自己相似性マッチングの結果を用いて、アップスケーリングされた出力イメージを生成するよう構成される出力イメージ生成部と
を有する装置。 - 入力イメージをアップスケーリングするよう構成される装置であって、スーパーピクセルを使用したクロススケール自己相似性マッチングが、アップスケーリングされたイメージにおける不足しているディテールを代用するものを得るために用いられる、前記装置において、
プロセッシングデバイス及びメモリデバイスを有し、
前記メモリデバイスには、
前記プロセッシングデバイスによって実行される場合に、当該装置に、
前記入力イメージ及び1つ以上の補助入力イメージのために、一貫性のあるスーパーピクセルを生成させ、
前記一貫性のあるスーパーピクセルに基づきスーパーピクセルテストベクトルを生成させ、
前記スーパーピクセルテストベクトルを用いて前記入力イメージ及び前記1つ以上の補助入力イメージに対してクロススケール自己相似性マッチングを実施させ、
前記クロススケール自己相似性マッチングの結果を用いて、アップスケーリングされた出力イメージを生成させる
命令が記憶されている、装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP14306131.5 | 2014-07-10 | ||
| EP14306131 | 2014-07-10 | ||
| PCT/EP2015/064974 WO2016005242A1 (en) | 2014-07-10 | 2015-07-01 | Method and apparatus for up-scaling an image |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017527011A true JP2017527011A (ja) | 2017-09-14 |
| JP2017527011A5 JP2017527011A5 (ja) | 2018-07-26 |
Family
ID=51228396
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017500884A Withdrawn JP2017527011A (ja) | 2014-07-10 | 2015-07-01 | イメージをアップスケーリングする方法及び装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20170206633A1 (ja) |
| EP (1) | EP3167428A1 (ja) |
| JP (1) | JP2017527011A (ja) |
| KR (1) | KR20170032288A (ja) |
| CN (1) | CN106489169A (ja) |
| WO (1) | WO2016005242A1 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108780570B (zh) * | 2016-01-16 | 2022-12-06 | 特利丹菲力尔有限责任公司 | 使用迭代协同滤波的图像超分辨率的系统和方法 |
| KR102010085B1 (ko) * | 2017-12-26 | 2019-08-12 | 주식회사 포스코 | 수퍼픽셀을 이용한 미세조직의 라벨링 이미지 생성방법 및 생성장치 |
| KR102010086B1 (ko) * | 2017-12-26 | 2019-08-12 | 주식회사 포스코 | 미세조직의 상 분할 방법 및 장치 |
| CN111382753B (zh) * | 2018-12-27 | 2023-05-12 | 曜科智能科技(上海)有限公司 | 光场语义分割方法、系统、电子终端及存储介质 |
| RU2697928C1 (ru) | 2018-12-28 | 2019-08-21 | Самсунг Электроникс Ко., Лтд. | Способ сверхразрешения изображения, имитирующего повышение детализации на основе оптической системы, выполняемый на мобильном устройстве, обладающем ограниченными ресурсами, и мобильное устройство, его реализующее |
| KR102349156B1 (ko) * | 2019-12-17 | 2022-01-10 | 주식회사 포스코 | 미세 조직의 상 분할 장치 및 방법 |
| CN116934636B (zh) * | 2023-09-15 | 2023-12-08 | 济宁港航梁山港有限公司 | 一种水质实时监测数据智能管理系统 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102163329A (zh) * | 2011-03-15 | 2011-08-24 | 河海大学常州校区 | 基于尺度类推的单幅红外图像的超分辨率重建方法 |
| CN103514580B (zh) * | 2013-09-26 | 2016-06-08 | 香港应用科技研究院有限公司 | 用于获得视觉体验优化的超分辨率图像的方法和系统 |
| CN103700062B (zh) * | 2013-12-18 | 2017-06-06 | 华为技术有限公司 | 图像处理方法和装置 |
-
2015
- 2015-07-01 EP EP15732284.3A patent/EP3167428A1/en not_active Withdrawn
- 2015-07-01 KR KR1020177000634A patent/KR20170032288A/ko unknown
- 2015-07-01 US US15/324,762 patent/US20170206633A1/en not_active Abandoned
- 2015-07-01 JP JP2017500884A patent/JP2017527011A/ja not_active Withdrawn
- 2015-07-01 CN CN201580037782.9A patent/CN106489169A/zh not_active Withdrawn
- 2015-07-01 WO PCT/EP2015/064974 patent/WO2016005242A1/en active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| KR20170032288A (ko) | 2017-03-22 |
| CN106489169A (zh) | 2017-03-08 |
| EP3167428A1 (en) | 2017-05-17 |
| WO2016005242A1 (en) | 2016-01-14 |
| US20170206633A1 (en) | 2017-07-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Chen et al. | Real-world single image super-resolution: A brief review | |
| Kim et al. | Spatio-temporal transformer network for video restoration | |
| Liu et al. | Robust video super-resolution with learned temporal dynamics | |
| US11783231B2 (en) | System and method for joint image refinement and perception | |
| Yan et al. | Attention-guided network for ghost-free high dynamic range imaging | |
| CN111047516B (zh) | 图像处理方法、装置、计算机设备和存储介质 | |
| JP2017527011A (ja) | イメージをアップスケーリングする方法及び装置 | |
| Engin et al. | Cycle-dehaze: Enhanced cyclegan for single image dehazing | |
| Liu et al. | Video frame synthesis using deep voxel flow | |
| Liu et al. | Learning temporal dynamics for video super-resolution: A deep learning approach | |
| Caballero et al. | Real-time video super-resolution with spatio-temporal networks and motion compensation | |
| US20220222776A1 (en) | Multi-Stage Multi-Reference Bootstrapping for Video Super-Resolution | |
| WO2023284401A1 (zh) | 图像美颜处理方法、装置、存储介质与电子设备 | |
| KR102342526B1 (ko) | 비디오 컬러화 방법 및 장치 | |
| CN115546505A (zh) | 一种基于深度学习的无监督单目图像深度估计方法 | |
| Luvizon et al. | Adaptive multiplane image generation from a single internet picture | |
| Rota et al. | Video restoration based on deep learning: a comprehensive survey | |
| Tej et al. | Enhancing perceptual loss with adversarial feature matching for super-resolution | |
| CN113902611A (zh) | 图像美颜处理方法、装置、存储介质与电子设备 | |
| Shaw et al. | Hdr reconstruction from bracketed exposures and events | |
| Zhang et al. | Unsupervised detail-preserving network for high quality monocular depth estimation | |
| Pérez-Pellitero et al. | Perceptual video super resolution with enhanced temporal consistency | |
| Banterle et al. | Unsupervised HDR Imaging: What Can Be Learned from a Single 8-bit Video? | |
| Jiang et al. | An Improved Novel View Synthesis Approach Based on Feature Fusion and Channel Attention | |
| Prasad et al. | Digital Image Enhancement using Conventional Neural Network |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180612 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180612 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20190118 |