JP2017512522A - 対象に固有の動きモデルを生成かつ使用する装置および方法 - Google Patents
対象に固有の動きモデルを生成かつ使用する装置および方法 Download PDFInfo
- Publication number
- JP2017512522A JP2017512522A JP2016555581A JP2016555581A JP2017512522A JP 2017512522 A JP2017512522 A JP 2017512522A JP 2016555581 A JP2016555581 A JP 2016555581A JP 2016555581 A JP2016555581 A JP 2016555581A JP 2017512522 A JP2017512522 A JP 2017512522A
- Authority
- JP
- Japan
- Prior art keywords
- shape
- specific
- parameters
- representations
- model
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images











Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/12—Edge-based segmentation
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/143—Segmentation; Edge detection involving probabilistic approaches, e.g. Markov random field [MRF] modelling
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/149—Segmentation; Edge detection involving deformable models, e.g. active contour models
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/30—Determination of transform parameters for the alignment of images, i.e. image registration
- G06T7/33—Determination of transform parameters for the alignment of images, i.e. image registration using feature-based methods
- G06T7/344—Determination of transform parameters for the alignment of images, i.e. image registration using feature-based methods involving models
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/74—Image or video pattern matching; Proximity measures in feature spaces
- G06V10/75—Organisation of the matching processes, e.g. simultaneous or sequential comparisons of image or video features; Coarse-fine approaches, e.g. multi-scale approaches; using context analysis; Selection of dictionaries
- G06V10/755—Deformable models or variational models, e.g. snakes or active contours
- G06V10/7553—Deformable models or variational models, e.g. snakes or active contours based on shape, e.g. active shape models [ASM]
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10072—Tomographic images
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20081—Training; Learning
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20112—Image segmentation details
- G06T2207/20124—Active shape model [ASM]
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30004—Biomedical image processing
- G06T2207/30081—Prostate
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V2201/00—Indexing scheme relating to image or video recognition or understanding
- G06V2201/03—Recognition of patterns in medical or anatomical images
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V2201/00—Indexing scheme relating to image or video recognition or understanding
- G06V2201/03—Recognition of patterns in medical or anatomical images
- G06V2201/031—Recognition of patterns in medical or anatomical images of internal organs
Abstract
Description
1.入手可能な訓練データを全て用いて混合対象のSSMを組み立てる。
2.混合対象のSSMに関連する各訓練データの組の形状パラメータを(例えば、線形モデルの例を予測することによって)入手する。
3.各対象の異なる訓練形状に対応する形状パラメータの各組のSSPDFを推定する。SSPDFはパラメータ形式で表現されてもよく、複数の分布パラメータ、例えばガウス分布に対する平均値と分散で表現されてもよい。
4.各対象の基準形状を特定する。例えば、基準形状は「安静状態」すなわち変形していない状態の臓器を表現してもよく、あるいは具体的な生理事象に対応する時点での臓器を表現してもよい。基準形状は、この後形状パラメータで表現される。
5.各対象に対し、各SSPDFを特徴付けるパラメータと基準形状を規定する形状パラメータの間のカーネル回帰解析を行う。
6.新規の対象の基準形状を所与として、回帰分析を用いて新規の対象のSSPDFを予測する。
7.最後に、予測したSSPDFを用いて新規の対象に固有のSMMを組み立てる。
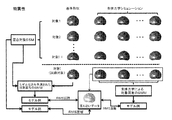
図2は、対象Iの前立腺の形状の三角形のメッシュで表された模式的表現を示す。この例では、有限要素(FE)モデル化手法を用いて各メッシュの形状をモデル化して、経直腸超音波(TRUS)プローブの存在に応じた基準形状の種々の物理的変形を予測した。図2に、それぞれの変形形状の例に対するTRUSプローブの3D位置および/または向きを陰影付きの中空円筒で示す。

i番目の対象に固有の確率密度は
所与の対象(i)の分布パラメータすなわちμiおよびσi 2は、所与の一組のサンプル{bij,j=1, 2,..., Ji}によって、以下の最大確率推定量を用いて推定してもよい。すなわち、
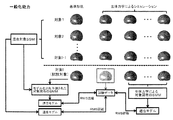
新規の対象の基準形状データを所与として、先ず、グループワイズ位置合わせの平均形状に非剛体位置合わせし、[1]、次に剛体要素を除去した後に混合対象のSSMの主成分に投影することによって、新規の対象の形状パラメータbnew,0を推定することができる。すなわち、
h=10Xで表せる各回帰カーネルパラメータに対し、式(5)のように、回帰残余の二乗平均平方根として定義された交差検証誤差を最少化することによって、最適値が計算される。回帰誤差は、1個抜き交差検証の中で各データに対し、(式(3)および(4)で訓練データから計算された)グラウンドトゥルース分布パラメータと、(式(6)および(8)で試験データから計算された)予測分布パラメータとの差を比較して計算される。この研究では、この後に黄金探索法を用いて、目的関数として働く交差検証誤差を最少化して、所定間隔
本明細書に記載のモデル化技法の利点の1つは、動きの亜空間の間の時間すなわち位相(例えば呼吸周期内の位置)の一致を必要としないことである。確率密度だけをモデル化して対象の動きを表現し、動きのデータを訓練データの組の中で任意の順序にグループ分けすることができるので、多くの現実的な難しさが解消される。しかしそれでも、対象の亜空間の間で点の一致が必要である。言い換えれば、一組の所定の特徴(例えば解剖学上の目印)が(複数の点に対応する)臓器および各画像またはデータの組に対し規定され、画像内のこれらの特徴(点)の位置が決定される。このようにすることによって点の対応を決定することができるようになり、すなわちそれぞれの点または特徴に対し、各画像またはデータの組の特徴の(対応する)位置が決まる。この点対応を、例えばグループワイズ表面位置合わせ[1]によって推定してもよい。
1)データ収集。上記方法を試験するために、初見の前立腺の対象に固有のSMMを組み立て、[12]に記述された生体力学モデル化手法を直接用いて生成したSMMと比較した。36人の患者のそれぞれに対し、TRUS−プローブによる前立腺の変形の100個の有限要素のシミュレーションを用いて、混合対象のSSMを組み立て、合計3600個の訓練形状を得た。各シミュレーションに対し、種々のプローブ/バルーンの位置と向き、異なるバルーンの直径、および異なる弾性材料の特性を当てはめた(詳細は[12]を参照)。36人の患者のそれぞれに対し、T2強調MR走査(画像)内の被膜を臨床観察の専門家が手作業で区画分けして得た形状を、前立腺の基準形状として規定した。
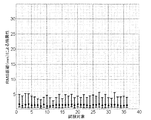
すなわち臓器の動きを捕らえて初見のデータに登録するための事前情報を提供することに密接に関連する。一般化能力は、別途に組み込まれた1個抜き交差検証法[17]によって測定される。一般化能力の定義は、初見の試験データの組のメッシュの結節点と、試験データに合わせて例示化されたモデル(すなわち適合モデル)の対応する結節点との間のRMSユークリッド距離で定義される。具体的には、RMS距離による一般化能力は次式で与えられる。
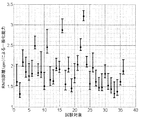
図7は、3つの新規の対象に対する第1の4つの予測されたSSPDFに対する因子別のP(Bil)のグラフ(下側の実線)の例を、元の{bij}を用いて組み立てられたヒストグラム(上の点線)と比較して示す。対応する曲線から、この研究に用いられたデータのP(Bil)を表す点線と、3人の患者に対する第1の4つの主成分に対する回帰が推定された対象に固有の確率密度曲線を表す実線との間に、優れた一致があることが分かる。対応する曲線の間の良い一致がX2試験で評価された。結果である平均p>0.78は良い一致を示しており、カーネル回帰解析が有効であることと、この研究においてPDFのモデル化にガウス分布形を選択したことの正当性が得られた。
本明細書に記載の手法は、対象に固有の臓器の動きをモデル化する新しい枠組みを提供し、初見の患者に対する動的撮影またはコンピューターシミュレーションのどちらか片方から得たデータではなく訓練母集団からの学習統計値を用いて、対象に固有の訓練データを予測する。開示された方法は、異なる個々の対象のデータの組の間の動きの明確な対応を知らなくても、対象に固有の臓器の動きをモデル化することができることを暗示している。
[1] Heimann, T. & Meinzer, H. P. 2009, ”Statistical shape models for 3D medical image segmentation: a review(3D医用画像の分割のための統計的形状モデル:再検討)”, Med.Image Anal., vol. 13, no. 4, pp. 543−563.
[2] Barratt, D. C., Chan, C. S. K., Edwards, P. J., Penney, G. P., Slomczykowski, M., Carter, T. J., & Hawkes, D. J. 2008, ”Instantiation and registration of statistical shape models of the femur and pelvis using 3D ultrasound imaging(3D超音波撮影を用いた大腿骨および骨盤の統計的形状モデルの例示化と位置合わせ)”, Medical Image Analysis, vol. 12, no. 3, pp. 358−374.
[3] Cootes, T. F., Taylor, C. J., Cooper, D. H., & Graham, J. 1995, ”Active Shape Models − their Training and Application(動的形状モデル−その訓練と応用)”, Computer Vision and Image Understanding, vol. 61, no. 1, pp. 38−59.
[4] Mohamed, A., Davatzikos, C., & Taylor, R. 2002, ” A Combined Statistical and Biomechanical Model for Estimation of Intra−operative Prostate Deformation(前立腺の術中の変形を推定する統計と生体力学を結合したモデル)” in Medical Image Computing and Computer−Assisted Intervention - MICCAI 2002, LNCS 2489 edn, pp. 452−460.
[5] Hu, Y., Carter, T., Ahmed, H., Emberton, M., Allen, C., Hawkes, D., & Barratt, D. 2011, ”Modelling Prostate Motion for Data Fusion during Image−guided Interventions(画像により誘導される手術中のデータ融合のための前立腺の動きのモデル化)”, Medical Imaging, IEEE Transactions on, vol. 30, no. 11, pp. 1887−1900.
[6] Hu, Y., Morgan, D., Ahmed, H. U., Pendse, D., Sahu, M., Allen, C., Emberton, M., & Hawkes, D. &. B. D. 2008b, ”A Statistical Motion Model based on Biomechanical Simulations for Data Fusion during Image−guided Prostate Interventions(画像により誘導される手術中のデータ融合のための生体力学シミュレーションに基づく統計的動きモデル)” in MICCAI 2008, LNCS 5241 edn, Springer, pp. 737−744.
[7] Ehrhardt, J., Werner, R., Schmidt−Richberg A., & Handels, H., 2010, ”A statistical shape and motion model for the prediction of respiratory lung motion(呼吸肺の動きを予測する統計的形状と動きモデル)”, SPIE Medical Imaging 2010: Image Processing, vol. 7623, pp. 531−539.
[8] Wang, Y. & Staib, L. H. 2000, ”Physical model−based non−rigid registration incorporating statistical shape information(形状に関する統計情報を取り入れた物理モデルによる非剛体位置合わせ)”, Medical.Image Analysis., vol. 4, no. 1, pp. 7−20.
[9] Vasilescu, M.A.O. and Terzopoulos, D., 2002, ”Multilinear Analysis of Image Ensembles: TensorFaces(画像の集合の多重線形解析:テンソルフェース(TensorFaces)” in ECCV2002, Vol. LNCS 2350, pp.447−460.
[10] Zhu, Y., Papademetris, X., Sinusas, A.J. and Duncan, J.S.: ”Bidirectional Segmentation of Three−Dimensional Cardiac MR Images Using a Subject−Specific Dynamical Model(対象に固有の動的モデルを用いた三次元心臓MR画像の二方向分割)” 2008, in MICCAI2008, LNCS 5242, 450−457.
[11] Grbic, S., Ionasec, R., Vitanovski, D., Voigt, I., Wang, Y., Georgescu, B., Navab, N. and Comaniciu, D.: ”Complete Valvular Heart Apparatus Model from 4D Cardiac CT.(4D心臓CTを元にして組み立てた完全な心臓弁装置モデル)” 2006, in MICCAI2010, LNCS 6361, 218−226.
[12] Hu, Y., Ahmed, H. U., Taylor, Z., Allen, C., Emberton, M., Hawkes, D., & Barratt, D. 2012, ”MR to ultrasound registration for image−guided prostate interventions(画像により誘導される前立腺手術のためのMRから超音波への位置合わせ)”, Medical Image Analysis, vol. 16, no. 3, pp. 687−703.
[13] Shlens, J. A Tutorial on Principal Component Analysis. 2009. www.snl.salk.edu/〜shlens/pca.pdf, Ver. 3.01
[14] Hastie, T., Tibshirani, R., and Friedman, J., 2009. ”The Elements of Statistical Learning: data mining, inference and prediction(統計学習の基礎:データの検索、推定、および予測)” 2nd ed., Springer.
[15] Hu, Y., Rijkhorst, E.−J., Manber, R., Hawkes, D., & Barratt, D. 2010, ”Deformable vessel−based registration using landmark−guided coherent point drift(目印により誘導されるコヒーレント点ドリフトを用いた変形自在の容器に基づく位置合わせ)” in MIAR’10 Proceedings of 前記 5th international conference on Medical imaging and augmented reality, vol. 6326 Springer, Beijing, pp. 60−69.
[16] Styner, M., Rajamani, K., Nolte, L. P., Zsemlye, G., Szekely, G. A., Taylor, C., & Davies, R. 2003, ”Evaluation of 3D Correspondence Methods for Model Building(モデル構築のための三次元対応法の評価)”, pp. 63−75.
[17] Hu, Y., van den Boom, R., Carter, T., Taylor, Z., Hawkes, D., Ahmed, H. U., Emberton, M., Allen, C., & Barratt, D. 2010, ”A comparison of the accuracy of statistical models of prostate motion trained using data from biomechanical simulations(生体力学シミュレーションから得たデータを用いて訓練した前立腺の動きの統計モデルの精度の比較)”, Progress in Biophysics and Molecular Biology, vol. 103, no. 2−3, pp. 262−272.
Claims (25)
- 解剖学的構造の形状の変動に関する対象に固有の統計モデルを、解剖学的構造の形状に関する一組の幾何学表現を用いて組み立てる方法であって、各表現は複数の対象の1つと関連しており、各対象は関連した複数の表現のそれぞれの部分集合を有し、各部分集合は基準表現を含む複数の表現を備え、複数の表現は解剖学的構造の物理的な動きおよび/または変形から生じる種々の形状に対応しており、
任意の所与の表現に対し、その値が表現の形状を特徴付ける一組の形状パラメータを規定することと、
各対象に対し、その対象と関連する表現の部分集合全体にわたる形状パラメータの値の確率分布を、一組の対象に固有の分布パラメータによって表すことと、
対象に固有の分布パラメータと各対象の基準表現との間の回帰を決定することと、
決定した回帰を新規の対象に対する基準表現に当てはめて、新規の対象に固有の分布パラメータを決定することと、
対象に固有の分布パラメータを用いて、新規の対象に固有の統計的動きモデルを組み立てることとを含む方法。 - 一組の形状パラメータは主成分解析を用いて決定されることを特徴とする請求項1に記載の方法。
- 一組の形状ベクトルsg(g=1, 2,...G)を提供する(ここで、Gは一組の表現の中の表現の数であり、各表現に対応する形状ベクトルが存在し、主成分解析は各形状ベクトルをL個の主成分によって表す)ことと、
一組の形状パラメータを規定することは、混合対象の統計形状モデルを式
(ここで、
- 形状ベクトルsgは、一組の表現に対する点対応データを含み、形状が変動中の複数の点の所定の組の空間座標を、一組の表現全体にわたって追跡することを特徴とする請求項3に記載の方法。
- 一組の形状パラメータ内の形状パラメータの1つに対する値の確率分布は、一組の形状パラメータ内の他の形状パラメータから独立しているとみなされることを特徴とする請求項1乃至4のいずれか1項に記載の方法。
- 一組の形状パラメータにはL個の形状パラメータがあり、対象(i)と関連する表現の部分集合に対する形状パラメータの値の確率分布(
- 所与の対象(i)に対する分布パラメータ、すなわちμiおよびσi 2は、所与の一組のサンプル{bij,j=1, 2,..., Ji}に対して、以下の最大確率推定量
- 各分布パラメータはカーネルの一次関数で表わされることを特徴とする請求項1乃至7のいずれか1項に記載の方法。
- 回帰は線形最小二乗法によって決定されることを特徴とする請求項1乃至8のいずれか1項に記載の方法。
- 一組の形状パラメータを規定し、その値は、任意の所与の表現の形状を特徴付け、混合対象の統計形状モデルは式
対象に固有のSMMは
- 解剖学的構造は軟組織の臓器を含み、形状の変動は臓器の変形または動きを含むことを特徴とする請求項1乃至10のいずれか1項に記載の方法。
- 基準表現は、安静状態すなわち未変形状態の臓器を表すことを特徴とする請求項11に記載の方法。
- 基準表現は、特定の生理事象に対応する時刻における臓器を表現することを特徴とする請求項11または12に記載の方法。
- 表現のうち少なくとも1つは画像を含むことを特徴とする請求項1乃至13のいずれか1項に記載の方法。
- 表現のうち少なくとも1つは生体力学モデルに由来することを特徴とする請求項1乃至14のいずれか1項に記載の方法。
- 解剖学的構造上の解剖学的目印を用いて、一組の表現に対する点対応データを提供し、点対応データを用いて、形状が変動中の複数の点の所定の組の空間座標を、一組の表現全体にわたって追跡することをさらに含むことを特徴とする請求項1乃至15のいずれか1項に記載の方法。
- 点対応データは、異なる対象に対する基準表現の間の画像の登録を実施することによって決定されることを特徴とする請求項16に記載の方法。
- 画像の登録を目的として、対象に固有の統計的動きモデルを新規の対象に用いることをさらに含むことを特徴とする請求項1乃至17のいずれか1項に記載の方法。
- 画像の分割を目的として、対象に固有の統計的動きモデルを新規の対象に用いることをさらに含むことを特徴とする請求項1乃至18のいずれか1項に記載の方法。
- 画像の登録または画像の分割を用いて、画像により支援される治療を補助することを特徴とする請求項18または19に記載の方法。
- コンピューターシステムの1つ以上の演算素子で実行されるときに、請求項1乃至20のいずれか1項に記載の方法の工程の実質的に全てを実行するプログラム命令を含むコンピュータープログラム。
- 読み取り可能な媒体に保存された請求項21に記載のコンピュータープログラムを備えるコンピュータープログラム製品。
- 請求項1乃至20のいずれか1項に記載の方法の工程の実質的に全てを実行する装置。
- 実質的に本明細書で添付図面を参照して記載した装置。
- 実質的に本明細書で添付図面を参照して記載した方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| GB1403772.5 | 2014-03-04 | ||
| GB201403772A GB201403772D0 (en) | 2014-03-04 | 2014-03-04 | Apparatus and method for generating and using a subject-specific statistical motion model |
| PCT/GB2015/050608 WO2015132575A1 (en) | 2014-03-04 | 2015-03-03 | Apparatus and method for generating and using a subject-specific statistical motion model |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017512522A true JP2017512522A (ja) | 2017-05-25 |
| JP2017512522A5 JP2017512522A5 (ja) | 2017-12-21 |
Family
ID=50490747
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016555581A Ceased JP2017512522A (ja) | 2014-03-04 | 2015-03-03 | 対象に固有の動きモデルを生成かつ使用する装置および方法 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US10115201B2 (ja) |
| EP (1) | EP3114645B1 (ja) |
| JP (1) | JP2017512522A (ja) |
| AU (1) | AU2015225921A1 (ja) |
| CA (1) | CA2940992C (ja) |
| GB (1) | GB201403772D0 (ja) |
| WO (1) | WO2015132575A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020054503A1 (ja) * | 2018-09-13 | 2020-03-19 | 国立大学法人京都大学 | 機械学習装置、推定装置、プログラム及び学習済みモデル |
| JP2020114374A (ja) * | 2019-01-03 | 2020-07-30 | シーメンス ヘルスケア ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 動き補償画像を生成する医用撮像装置、システム、方法、及び対応する記憶媒体 |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2012096882A1 (en) * | 2011-01-11 | 2012-07-19 | Rutgers, The State University Of New Jersey | Method and apparatus for segmentation and registration of longitudinal images |
| US9851421B2 (en) | 2015-01-05 | 2017-12-26 | Case Western Reserve University | Differential atlas for cancer assessment |
| US10300303B2 (en) * | 2016-01-29 | 2019-05-28 | Elekta Ltd. | Therapy control using motion prediction based on cyclic motion model |
| JP6821153B2 (ja) * | 2016-11-10 | 2021-01-27 | 大日本印刷株式会社 | 生体組織画像解析システム、画像処理システム及びプログラム |
| US10952705B2 (en) * | 2018-01-03 | 2021-03-23 | General Electric Company | Method and system for creating and utilizing a patient-specific organ model from ultrasound image data |
| US10898151B2 (en) * | 2018-10-31 | 2021-01-26 | Medtronic Inc. | Real-time rendering and referencing for medical procedures |
| CN111127488B (zh) * | 2019-12-29 | 2022-10-14 | 兰州理工大学 | 一种基于统计形状模型自动构建患者解剖结构模型的方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009512524A (ja) * | 2005-10-24 | 2009-03-26 | ノルディック・ビオサイエンス・エー/エス | 軟骨スキャンデータからの病状表示測度の自動定量化 |
| US20120155734A1 (en) * | 2009-08-07 | 2012-06-21 | Ucl Business Plc | Apparatus and method for registering two medical images |
| JP2014018376A (ja) * | 2012-07-17 | 2014-02-03 | Canon Inc | 画像処理装置及び方法 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8165359B2 (en) * | 2005-08-30 | 2012-04-24 | Agfa Healthcare N.V. | Method of constructing gray value or geometric models of anatomic entity in medical image |
| US20070047790A1 (en) * | 2005-08-30 | 2007-03-01 | Agfa-Gevaert N.V. | Method of Segmenting Anatomic Entities in Digital Medical Images |
| DE602007008390D1 (de) * | 2006-03-24 | 2010-09-23 | Exini Diagnostics Ab | Automatische interpretation von medizinischen 3d-bildern des hirns und verfahren zum produzieren von zwischenergebnissen |
| US8666128B2 (en) * | 2007-10-18 | 2014-03-04 | The University Of North Carolina At Chapel Hill | Methods, systems, and computer readable media for mapping regions in a model of an object comprising an anatomical structure from one image data set to images used in a diagnostic or therapeutic intervention |
| US8953856B2 (en) * | 2008-11-25 | 2015-02-10 | Algotec Systems Ltd. | Method and system for registering a medical image |
| US8724906B2 (en) | 2011-11-18 | 2014-05-13 | Microsoft Corporation | Computing pose and/or shape of modifiable entities |
| US9269156B2 (en) | 2012-07-24 | 2016-02-23 | Siemens Aktiengesellschaft | Method and system for automatic prostate segmentation in magnetic resonance images |
-
2014
- 2014-03-04 GB GB201403772A patent/GB201403772D0/en not_active Ceased
-
2015
- 2015-03-03 US US15/120,991 patent/US10115201B2/en active Active
- 2015-03-03 JP JP2016555581A patent/JP2017512522A/ja not_active Ceased
- 2015-03-03 EP EP15709309.7A patent/EP3114645B1/en active Active
- 2015-03-03 WO PCT/GB2015/050608 patent/WO2015132575A1/en active Application Filing
- 2015-03-03 CA CA2940992A patent/CA2940992C/en active Active
- 2015-03-03 AU AU2015225921A patent/AU2015225921A1/en not_active Abandoned
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009512524A (ja) * | 2005-10-24 | 2009-03-26 | ノルディック・ビオサイエンス・エー/エス | 軟骨スキャンデータからの病状表示測度の自動定量化 |
| US20120155734A1 (en) * | 2009-08-07 | 2012-06-21 | Ucl Business Plc | Apparatus and method for registering two medical images |
| JP2013501290A (ja) * | 2009-08-07 | 2013-01-10 | ユーシーエル ビジネス ピーエルシー | 2つの医用画像を位置合わせするための装置および方法 |
| JP2014018376A (ja) * | 2012-07-17 | 2014-02-03 | Canon Inc | 画像処理装置及び方法 |
Non-Patent Citations (1)
| Title |
|---|
| YUN ZHU, XENOPHON PAPADEMITIRS, ALBERT SINUSAS, JAMES S. DUNCAN: "Segmentation of Left Ventricle From 3D Cardiac MR Image Sequences Using A Subjet-Specific Dynamic Mo", COMPUTER VISION AND PATTERN RECOGNITION, 2008. CVPR 2008. IEEE CONFERENCE ON, IEEE, PISCATAWY, NJ, U, JPN6018030548, 23 June 2008 (2008-06-23), pages 1 - 8, ISSN: 0004052089 * |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020054503A1 (ja) * | 2018-09-13 | 2020-03-19 | 国立大学法人京都大学 | 機械学習装置、推定装置、プログラム及び学習済みモデル |
| JPWO2020054503A1 (ja) * | 2018-09-13 | 2021-09-16 | 国立大学法人京都大学 | 機械学習装置、推定装置、プログラム及び学習済みモデル |
| US11631177B2 (en) | 2018-09-13 | 2023-04-18 | Kyoto University | Machine learning device, estimation device, non-transitory computer readable medium, and learned model |
| JP7349158B2 (ja) | 2018-09-13 | 2023-09-22 | 国立大学法人京都大学 | 機械学習装置、推定装置、プログラム及び学習済みモデル |
| JP2020114374A (ja) * | 2019-01-03 | 2020-07-30 | シーメンス ヘルスケア ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 動き補償画像を生成する医用撮像装置、システム、方法、及び対応する記憶媒体 |
| JP7012695B2 (ja) | 2019-01-03 | 2022-01-28 | シーメンス ヘルスケア ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 動き補償画像を生成する医用撮像装置、システム、方法、及び対応する記憶媒体 |
| US11436721B2 (en) | 2019-01-03 | 2022-09-06 | Siemens Healthcare Gmbh | Medical imaging device, system, and method for generating a motion-compensated image, and corresponding storage medium |
Also Published As
| Publication number | Publication date |
|---|---|
| CA2940992A1 (en) | 2015-09-11 |
| EP3114645B1 (en) | 2018-11-14 |
| US20160364880A1 (en) | 2016-12-15 |
| US10115201B2 (en) | 2018-10-30 |
| WO2015132575A1 (en) | 2015-09-11 |
| EP3114645A1 (en) | 2017-01-11 |
| CA2940992C (en) | 2022-06-21 |
| GB201403772D0 (en) | 2014-04-16 |
| AU2015225921A1 (en) | 2016-09-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2017512522A (ja) | 対象に固有の動きモデルを生成かつ使用する装置および方法 | |
| US9761014B2 (en) | System and method for registering pre-operative and intra-operative images using biomechanical model simulations | |
| US10296707B2 (en) | System and method for patient-specific image-based guidance of cardiac arrhythmia therapies | |
| US10388013B2 (en) | Matching patient images and images of an anatomical atlas | |
| JP5520378B2 (ja) | 2つの医用画像を位置合わせするための装置および方法 | |
| US10496729B2 (en) | Method and system for image-based estimation of multi-physics parameters and their uncertainty for patient-specific simulation of organ function | |
| US20130243287A1 (en) | Longitudinal monitoring of pathology | |
| US9508144B2 (en) | Determining an anatomical atlas | |
| Hu | Registration of magnetic resonance and ultrasound images for guiding prostate cancer interventions | |
| EP2912632B1 (en) | Determining an anatomical atlas | |
| Terzopoulos | Tim McInerney |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171107 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171107 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180725 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180814 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20181113 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181226 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190611 |
|
| A045 | Written measure of dismissal of application [lapsed due to lack of payment] |
Free format text: JAPANESE INTERMEDIATE CODE: A045 Effective date: 20191112 |