JP2017222279A - Travel route generation method and travel route generation apparatus - Google Patents
Travel route generation method and travel route generation apparatus Download PDFInfo
- Publication number
- JP2017222279A JP2017222279A JP2016119705A JP2016119705A JP2017222279A JP 2017222279 A JP2017222279 A JP 2017222279A JP 2016119705 A JP2016119705 A JP 2016119705A JP 2016119705 A JP2016119705 A JP 2016119705A JP 2017222279 A JP2017222279 A JP 2017222279A
- Authority
- JP
- Japan
- Prior art keywords
- target
- parking frame
- travel route
- route generation
- target position
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Abstract
Description
本発明は、走行経路生成方法及び走行経路生成装置に関する。 The present invention relates to a travel route generation method and a travel route generation device.
従来より、車両が走行する経路を車両自体が生成する技術が知られている(特許文献1)。特許文献1は、前方の障害物を避けるために、通常経路から外れる走行経路(仮想障害物の間を通る走行経路)を短時間で生成することを開示している。
Conventionally, a technique in which a vehicle itself generates a route along which the vehicle travels is known (Patent Document 1).
ここで、自律的に駐車する自律走行車両に特許文献1の技術を適用することを考えた場合、特許文献1は仮想障害物の間を通過する際の車両姿勢に言及していない。そのため、通常経路から外れて駐車枠付近に幅寄せを行い、車路幅を有効活用した駐車を可能にできるとはいえない。
Here, when applying the technique of
本発明は、上記問題に鑑みて成されたものであり、その目的は、車路幅を有効活用した自律駐車を行うことができる走行経路生成方法及び走行経路生成装置を提供することである。 The present invention has been made in view of the above problems, and an object of the present invention is to provide a travel route generation method and a travel route generation device that can perform autonomous parking effectively utilizing a road width.
本発明の一態様に係る走行経路生成方法は、駐車枠を検出したとき、駐車枠を検出する前の走行経路における目標位置及び目標姿勢から、駐車枠に幅寄せ可能な目標位置及び目標姿勢に変更する。 In the travel route generation method according to one aspect of the present invention, when a parking frame is detected, the target position and the target posture on the travel route before detecting the parking frame are changed to the target position and the target posture that can be brought closer to the parking frame. change.
本発明によれば、車路幅を有効活用した自律駐車を行うことができる。 ADVANTAGE OF THE INVENTION According to this invention, the autonomous parking which utilized the road width effectively can be performed.
以下、本発明の実施形態について、図面を参照して説明する。図面の記載において同一部分には同一符号を付して説明を省略する。 Hereinafter, embodiments of the present invention will be described with reference to the drawings. In the description of the drawings, the same portions are denoted by the same reference numerals, and description thereof is omitted.
図1を参照して本実施形態に係る走行経路生成装置1の構成について説明する。走行経路生成装置1は、自律運転機能を有する自律運転車両に適用される。図1に示すように、走行経路生成装置1は、GPS受信機10と、地図データベース20と、空間認識センサ30と、操舵角センサ40と、車輪速センサ50と、車両状態量センサ60と、コントローラ70と、車両制御部80と、アクチュエータ90とを備える。
A configuration of the travel
GPS受信機10は、人工衛星からの電波を受信することにより、車両の現在地を検知する。GPS受信機10は、検知した現在地をコントローラ70に出力する。
The
地図データベース20には、道路情報や施設情報などの地図情報が記憶されている。地図データベース20は、車両に搭載されるカーナビゲーション装置に記憶されていてもよいし、サーバ上に記憶されていてもよい。地図データベース20がサーバ上に記憶されている場合、コントローラ70は、通信により随時地図情報を取得することができる。
The
空間認識センサ30は、例えばレーザーレーダである。空間認識センサ30は、車両とその周囲の物体との距離を検出し、距離情報をポイントクラウド情報として取得する。空間認識センサ30は、取得したポイントクラウド情報をコントローラ70に出力する。
The
操舵角センサ40は、ステアリングホイールの操舵方向と操舵角を検出し、検出した操舵方向と操舵角をコントローラ70に出力する。車輪速センサ50は、車両の速度を検出し、検出した速度をコントローラ70に出力する。車両状態量センサ60は、車両の状態量を計測するセンサであり、例えば車両のヨーレートを検出するヨーレートセンサや加速度センサなどで構成される。車両状態量センサ60は、検出した車両状態量をコントローラ70に出力する。
The
コントローラ70は、GPS受信機10や空間認識センサ30などから取得したデータを処理する回路であり、例えばCPU、ROM、RAMおよび入出力インターフェースなどから成るマイクロコンピュータである。コントローラ70は、これを機能的に捉えた場合、走路境界推定部71と、走行空間設定部72と、目標演算部73と、変更部76と、駐車枠検出部74と、目標再計算部75と、目標経路生成部77とに分類することができる。
The
走路境界推定部71は、空間認識センサ30から取得したポイントクラウド情報を用いて走路の境界を推定する。例えば、走路境界推定部71は、駐車車両の並びから走路の境界を推定する。
The road
走行空間設定部72は、走路境界推定部71によって推定された走路の境界で挟まれた空間を、車両が走行可能な空間として設定する。また、走行空間設定部72は、走路の境界で挟まれた空間において、車両が周囲の物体と接触することなく走行できるように走行可能空間における車路幅や走路の向きを設定する。
The traveling
目標演算部73は、走行空間設定部72によって設定された走行可能空間を走行するための目標位置及びその目標位置における目標姿勢を演算する。目標姿勢とは、車体が目標とする姿勢である。なお、以下では、目標位置及びその目標位置における目標姿勢を、単に目標位置及び目標姿勢と表現する。
The
駐車枠検出部74は、空間認識センサ30から取得したポイントクラウド情報や走路境界推定部71によって推定された走路境界情報を用いて駐車枠を検出する。例えば、駐車枠検出部74は、ポイントクラウド情報から車両一台分の空間情報を認識した際に、その空間が走路方向に対して約90度の向きであればその空間を駐車枠として検出する。
The parking
目標再計算部75は、駐車枠検出部74によって検出された駐車枠に幅寄せ可能な目標位置及びその目標位置における目標姿勢を再計算する。本実施形態において、目標演算部73が演算する目標位置及び目標姿勢と、目標再計算部75が再計算する目標位置及び目標姿勢は、異なる。
The
変更部76は、目標演算部73によって演算された目標位置及び目標姿勢を、目標再計算部75によって再計算された目標位置及び目標姿勢に変更する。具体的な変更方法については後述する。
The changing
目標経路生成部77は、GPS受信機10が取得した現在地から、目標演算部73または目標再計算部75によって演算された目標位置までの目標経路(走行経路)を生成する。
The target
車両制御部80は、目標経路生成部77によって生成された目標経路を走行するために、各種センサの情報を使用しながらアクチュエータ90を制御し、自律運転を実現する。なお、車両制御部80は、目標経路生成部77から取得したデータを処理する回路であり、例えばCPU、ROM、RAMおよび入出力インターフェースなどから成るマイクロコンピュータである。また、アクチュエータ90には、ステアリングアクチュエータやアクセルペダルアクチュエータ、ブレーキアクチュエータなどが含まれる。
The
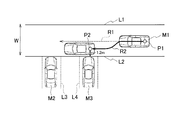
次に、図2を参照して、通常走行における目標経路の生成方法について説明する。図2に示すように、走路境界推定部71は、駐車車両M2〜M6の並びから走路の境界を示す走路境界線L1、L2を推定する。次に、走行空間設定部72は、走路境界線L1と走路境界線L2で挟まれた空間を自車両M1が走行可能な空間として設定する。また、走行空間設定部72は、走行可能空間の車路幅として、走路境界線L1から走路境界線L2までの距離を車路幅Wとして設定する。また、走行空間設定部72は、自車両M1が周囲の物体と接触することなく走行できるように走行可能空間における走路の向きを設定する。
Next, a method for generating a target route in normal travel will be described with reference to FIG. As shown in FIG. 2, the road
次に、目標演算部73は、走行空間設定部72によって設定された走路の向きに沿って走行するための目標位置及び目標姿勢を演算する。次に、目標経路生成部77は、GPS受信機10が取得した現在地P1から目標位置まで走行するための目標経路R1を生成する。そして、車両制御部80は、アクチュエータ90を制御して目標経路R1を走行する自律運転を実現する。
Next, the
次に、図3A〜図3Cを参照して、通常走行中に駐車枠を検出した場合の処理を説明する。本実施形態では、自車両M1は、駐車枠を探索しながら自律運転を行う。図3Aに示すように、通常走行中に駐車枠検出部74が白線L3と白線L4で挟まれた空間を駐車枠として検出した場合、目標再計算部75は、駐車枠に幅寄せ可能な目標位置及び目標姿勢を再計算する。
Next, with reference to FIGS. 3A to 3C, processing when a parking frame is detected during normal travel will be described. In the present embodiment, the host vehicle M1 performs autonomous driving while searching for a parking frame. As shown in FIG. 3A, when the parking
具体的には、図3Bに示すように、目標再計算部75は、駐車枠に幅寄せ可能な目標位置P2及び目標姿勢を再計算する。目標位置P2は、駐車枠の手前の走路境界線L2から、自車両M1の車幅方向の中心までの距離が、例えば1.2mになる位置である。また、目標位置P2における目標姿勢は、走行経路の向きに対して平行、あるいはほぼ平行となるような所定の範囲を有する姿勢である。
Specifically, as shown in FIG. 3B, the
次に変更部76は、目標演算部73によって演算された目標位置及び目標姿勢と、目標再計算部75によって再計算された目標位置P2及び目標姿勢のうち、どちらを優先するかを判断する。判断の基準として、自車両M1が現在地P1から目標位置P2に辿りつくまでに、目標位置P2における目標姿勢が走行経路に対して平行、あるいはほぼ平行となるか否かを基準として設定すればよい。例えば、現在地P1から目標位置P2までの距離が所定距離より長い場合、目標位置P2における目標姿勢が走行経路に対して平行、あるいはほぼ平行となると判断し、現在地P1から目標位置P2までの距離が所定距離より短い場合、目標位置P2における目標姿勢が走行経路に対して平行、あるいはほぼ平行とならないと判断すればよい。なお、判断の基準は、距離の長短に限定されない。目標位置P2における目標姿勢が走行経路に対して整う(平行、あるいはほぼ平行となる)場合、変更部76は、目標演算部73によって演算された目標位置及び目標姿勢を、目標再計算部75によって再計算された目標位置P2及び目標姿勢に変更する。
Next, the changing
一方、目標位置P2における目標姿勢が走行経路に対して整わない(平行、あるいはほぼ平行とならない)場合、変更部76は、目標演算部73によって演算された目標位置及び目標姿勢を継続する。この場合、駐車枠検出部74は、次の駐車枠を探索する。
On the other hand, when the target posture at the target position P2 is not aligned (parallel or substantially parallel) with respect to the travel route, the changing
変更部76が、目標演算部73によって演算された目標位置及び目標姿勢を、目標再計算部75によって再計算された目標位置P2及び目標姿勢に変更した場合、図3Bに示すように、目標経路生成部77は、現在地P1から目標位置P2までの目標経路R2を生成する。車両制御部80は、アクチュエータ90を制御して目標経路R2を走行する自律運転を実現する。次に、図3Cに示すように、目標演算部73は、駐車するための目標位置P3、P4及び目標姿勢を演算し、目標経路生成部77は目標位置P3、P4までの目標経路を生成する。そして、車両制御部80は、アクチュエータ90を制御して自律運転による駐車を完了する。
When the changing
次に、図4に示すフローチャートを参照して、走行経路生成装置1の一動作例について説明する。このフローチャートは、例えばイグニッションスイッチがオンされたときに開始する。
Next, an operation example of the travel
ステップS101において、GPS受信機10や空間認識センサ30などは、各種情報を取得する。
In step S101, the
ステップS102において、走路境界推定部71は、各種センサの情報を用いて走路の境界を推定する。
In step S102, the road
ステップS103において、走行空間設定部72は、走路境界推定部71によって推定された走路の境界を用いて車両が走行可能な空間を設定する。
In step S <b> 103, the traveling
ステップS104において、目標演算部73は、走路の向きに沿って走行するための目標位置及び目標姿勢を演算する。
In step S104, the
ステップS105において、駐車枠検出部74は、各種センサの情報を用いて車両が駐車可能な駐車枠を検出する。駐車枠検出部74が駐車枠を検出した場合(ステップS106でYes)、処理がステップS107に進む。一方、駐車枠検出部74が駐車枠を検出できない場合(ステップS106でNo)、処理はステップS105に戻る。
In step S105, the parking
ステップS107において、目標再計算部75は、駐車枠に幅寄せ可能な目標位置及び目標姿勢を再計算する。
In step S107, the
ステップS108において、変更部76は、目標演算部73によって演算された目標位置及び目標姿勢と、目標再計算部75によって再計算された目標位置及び目標姿勢のうち、どちらを優先するかを判断する。変更部76が目標位置及び目標姿勢を変更する場合(ステップS108でYes)、処理がステップS109に進む。一方、変更部76が目標位置及び目標姿勢を変更しない場合(ステップS108でNo)、処理がステップS110に進む。
In step S <b> 108, the changing
ステップS109において、目標経路生成部77は、駐車するための目標経路を生成する。
In step S109, the target
ステップS110において、目標経路生成部77は、通常走行するための目標経路を生成する。
In step S110, the target
ステップS111において、車両制御部80は、アクチュエータ90を制御して自律運転を実現する。
In step S111, the
以上説明したように、本実施形態に係る走行経路生成装置1によれば、以下の作用効果が得られる。
As described above, according to the travel
走行経路生成装置1は、自律走行中に駐車枠を検出した場合、駐車枠を検出する前の走行経路における目標位置及び目標姿勢から、駐車枠に幅寄せ可能な目標位置P2及び目標姿勢に変更する。これにより、車路幅Wを有効活用した自律駐車を行うことができる。具体的には、図3Cに示す車路幅Wが狭い場合でも駐車枠に幅寄せすることにより、この車路幅Wを有効活用した自律駐車が可能となる。
When the travel
走行経路生成装置1は、駐車枠を検出した場合に駐車枠に幅寄せ可能な目標位置P2及び目標姿勢を演算する。これにより、事前に駐車枠の情報を取得する必要がなくなり、走行環境に応じた様々な駐車枠での対応が可能となる。
The travel
走行経路生成装置1は、駐車枠の手前の位置を駐車枠に幅寄せ可能な目標位置P2として演算する。これにより、走行経路生成装置1は車路幅Wを最大限有効活用でき、様々な車路幅Wにおいて最適かつ最短経路での自律駐車が可能となる。
The travel
走行経路生成装置1は、走行経路と平行となるように駐車枠に幅寄せ可能な目標姿勢を演算する。これにより、走行経路生成装置1は車路幅Wを最大限有効活用でき、様々な車路幅Wにおいて最適かつ最短経路での自律駐車が可能となる。
The travel
走行経路生成装置1は、目標位置P2における目標姿勢が走行経路に対して整わない場合、駐車枠を検出する前の走行経路における目標位置及び目標姿勢を継続し、次の駐車枠を探索する。これにより、駐車枠の検出が遅れ、幅寄せする際の目標姿勢が不十分となる場合には通常走行中の目標位置及び目標姿勢を変更しないため、走行経路生成装置1は通常走行を継続することができる。また、走行経路生成装置1は引き続き駐車枠を探索するため、安全な自律駐車が可能となる。
When the target posture at the target position P2 is not aligned with the travel route, the travel
上記のように、本発明の実施形態を記載したが、この開示の一部をなす論述及び図面はこの発明を限定するものであると理解すべきではない。この開示から当業者には様々な代替実施の形態、実施例及び運用技術が明らかとなろう。 Although the embodiments of the present invention have been described as described above, it should not be understood that the descriptions and drawings constituting a part of this disclosure limit the present invention. From this disclosure, various alternative embodiments, examples and operational techniques will be apparent to those skilled in the art.
本実施形態において、走路境界推定部71は、ポイントクラウド情報を用いて走路の境界を推定したが、これに限られない。例えば、走路境界推定部71は、車両に設置されたカメラの画像から車線境界線や車道外側線等の路面に描かれた区画線を検出し、走路の境界を推定してもよい。
In this embodiment, the road
また、駐車枠検出部74は、レーザーレーダの情報を用いて駐車枠を検出したが、これに限られない。例えば、駐車枠検出部74は、地図情報や交通インフラストラクチャ情報を用いて駐車枠を検出してもよい。これにより、駐車枠検出部74はより早く駐車枠を検出でき、目標再計算部75はより早く駐車枠に幅寄せ可能な目標位置及び目標姿勢を再計算できる。これにより、よりスムーズな幅寄せが可能となる。
Moreover, although the parking
なお、上述の実施形態の各機能は、1または複数の処理回路により実装され得る。処理回路は、電気回路を含む処理装置等のプログラムされた処理装置を含む。処理回路は、また、実施形態に記載された機能を実行するようにアレンジされた特定用途向け集積回路(ASIC)や従来型の回路部品のような装置を含む。 Note that each function of the above-described embodiment may be implemented by one or a plurality of processing circuits. The processing circuit includes a programmed processing device such as a processing device including an electrical circuit. The processing circuitry also includes devices such as application specific integrated circuits (ASICs) and conventional circuit components arranged to perform the functions described in the embodiments.
1 走行経路生成装置
10 GPS受信機
20 地図データベース
30 空間認識センサ
40 操舵角センサ
50 車輪速センサ
60 車両状態量センサ
70 コントローラ
71 走路境界推定部
72 走行空間設定部
73 目標演算部
74 駐車枠検出部
75 目標再計算部
76 変更部
77 目標経路生成部
80 車両制御部
90 アクチュエータ
DESCRIPTION OF
Claims (7)
前記駐車枠を検出したとき、前記駐車枠を検出する前の走行経路における目標位置及び目標姿勢と異なる、前記駐車枠に幅寄せ可能な目標位置及び目標姿勢に変更することを特徴とする走行経路生成方法。 A traveling route generation method used for an autonomous driving vehicle that detects an object around the host vehicle and autonomously travels while searching for a parking frame,
When the parking frame is detected, the travel route is changed to a target position and a target posture that are different from a target position and a target posture in the travel route before the parking frame is detected, and can be brought closer to the parking frame. Generation method.
前記センサによって検出された前記周囲の物体に基づいて、自律走行を制御するコントローラと、を備え、
前記コントローラは、前記センサによって駐車枠が検出されたとき、前記駐車枠を検出する前の走行経路における目標位置及び目標姿勢と異なる、前記駐車枠に幅寄せ可能な目標位置及び目標姿勢に変更することを特徴とする走行経路生成装置。
A sensor that detects objects around the vehicle,
A controller that controls autonomous running based on the surrounding objects detected by the sensor, and
When the parking frame is detected by the sensor, the controller changes to a target position and a target posture that are different from a target position and a target posture on the travel route before the parking frame is detected and can be brought closer to the parking frame. A travel route generation device characterized by that.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016119705A JP6673043B2 (en) | 2016-06-16 | 2016-06-16 | Travel route generation method and travel route generation device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016119705A JP6673043B2 (en) | 2016-06-16 | 2016-06-16 | Travel route generation method and travel route generation device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017222279A true JP2017222279A (en) | 2017-12-21 |
| JP6673043B2 JP6673043B2 (en) | 2020-03-25 |
Family
ID=60686250
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016119705A Active JP6673043B2 (en) | 2016-06-16 | 2016-06-16 | Travel route generation method and travel route generation device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6673043B2 (en) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008179345A (en) * | 2006-12-26 | 2008-08-07 | Honda Motor Co Ltd | Automatic parking control apparatus for vehicle |
| JP2010208392A (en) * | 2009-03-09 | 2010-09-24 | Nissan Motor Co Ltd | Parking support device and parking support method |
| JP2010269707A (en) * | 2009-05-21 | 2010-12-02 | Honda Motor Co Ltd | Parking assist system of vehicle |
| WO2015137012A1 (en) * | 2014-03-12 | 2015-09-17 | 日産自動車株式会社 | Vehicle operation device |
-
2016
- 2016-06-16 JP JP2016119705A patent/JP6673043B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008179345A (en) * | 2006-12-26 | 2008-08-07 | Honda Motor Co Ltd | Automatic parking control apparatus for vehicle |
| JP2010208392A (en) * | 2009-03-09 | 2010-09-24 | Nissan Motor Co Ltd | Parking support device and parking support method |
| JP2010269707A (en) * | 2009-05-21 | 2010-12-02 | Honda Motor Co Ltd | Parking assist system of vehicle |
| WO2015137012A1 (en) * | 2014-03-12 | 2015-09-17 | 日産自動車株式会社 | Vehicle operation device |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6673043B2 (en) | 2020-03-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10310508B2 (en) | Vehicle control apparatus | |
| US9896101B2 (en) | Autonomous driving vehicle system | |
| CN108292475B (en) | Method and device for generating predicted vehicle information used for traveling of vehicle road network | |
| US20170227970A1 (en) | Autonomous driving system | |
| US10988139B2 (en) | Vehicle position control method and device vehicle position control device for correcting position in drive-assisted vehicle | |
| CN109195860B (en) | Lane curb assisted off-lane check and lane keeping system for autonomous vehicles | |
| US9911330B2 (en) | Driving assistance device and driving assistance method | |
| US10048699B2 (en) | Vehicle control apparatus | |
| JP6705414B2 (en) | Operating range determination device | |
| EP3655298B1 (en) | A tunnel-based planning system for autonomous driving vehicles | |
| US11338803B2 (en) | Traveling track determination processing and automated drive device | |
| RU2735720C1 (en) | Method of estimating a vehicle, a method for correcting a route, a vehicle evaluation device and a route correction device | |
| JP2019045379A (en) | Own vehicle position estimation device | |
| JP2017151764A (en) | Travelling control device | |
| JP6665929B2 (en) | Parking assistance method and device | |
| JP2017047798A (en) | Travel control device of vehicle | |
| JPWO2016189649A1 (en) | Stop position setting apparatus and method | |
| KR102057428B1 (en) | Driving control method and driving control device of vehicle | |
| JP6297956B2 (en) | Route generator | |
| JP2020005401A (en) | Control device of automatic operation vehicle | |
| JP2018180641A (en) | Vehicle identification device | |
| JP6848531B2 (en) | Target position estimation method and target position estimation device | |
| JP6673043B2 (en) | Travel route generation method and travel route generation device | |
| US20210303874A1 (en) | A point cloud-based low-height obstacle detection system | |
| JP7123994B2 (en) | vehicle control system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190328 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191126 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20191128 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200121 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200204 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200217 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6673043 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |