JP2017189014A - Power supply system and power supply method - Google Patents
Power supply system and power supply method Download PDFInfo
- Publication number
- JP2017189014A JP2017189014A JP2016075993A JP2016075993A JP2017189014A JP 2017189014 A JP2017189014 A JP 2017189014A JP 2016075993 A JP2016075993 A JP 2016075993A JP 2016075993 A JP2016075993 A JP 2016075993A JP 2017189014 A JP2017189014 A JP 2017189014A
- Authority
- JP
- Japan
- Prior art keywords
- power supply
- power
- guided vehicle
- automatic guided
- schedule
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T90/00—Enabling technologies or technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02T90/10—Technologies relating to charging of electric vehicles
- Y02T90/16—Information or communication technologies improving the operation of electric vehicles
Landscapes
- Charge And Discharge Circuits For Batteries Or The Like (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
Description
本発明は、走行中の無人搬送車に給電する給電システムおよび給電方法に関するものである。 The present invention relates to a power supply system and a power supply method for supplying power to a traveling automatic guided vehicle.
一般的に、無人搬送車の給電システムでは、無人搬送車が備えるバッテリの蓄電量が所定量未満となった場合に、所定の場所に設けられた充電ステーションに無人搬送車を移動させ、充電ステーションで待機中の無人搬送車に給電が行われている。 In general, in a power supply system for an automatic guided vehicle, when the amount of stored battery of the automatic guided vehicle is less than a predetermined amount, the automatic guided vehicle is moved to a charging station provided at a predetermined location, Power is being supplied to the automated guided vehicle at standby.
ところで、無人搬送車の稼働効率を向上させるためには、走行中の無人搬送車に給電を行うことが求められており、特許文献1には、パレットに搭載されたパレット側バッテリの電力を、無人搬送車が備える車両側バッテリに供給するシステムが記載されている。 By the way, in order to improve the operation efficiency of the automatic guided vehicle, it is required to supply power to the automatic guided vehicle that is running. In Patent Document 1, the power of the pallet-side battery mounted on the pallet is A system for supplying a vehicle-side battery included in an automatic guided vehicle is described.
しかしながら、特許文献1の給電システムでは、給電が必要な無人搬送車と給電が必要でない無人搬送車とを区別しておらず、使用される全てのパレットにパレット側バッテリが搭載されている場合には、給電が必要でない無人搬送車に対しても、無駄に給電が行われるおそれがある。すなわち、無人搬送車が荷物を搬送する際は給電装置(パレット側バッテリ)から無人搬送車(車両側バッテリ)への給電が常時行われるので、給電の効率性が低いという問題があった。 However, in the power supply system of Patent Document 1, there is no distinction between automatic guided vehicles that require power supply and automatic guided vehicles that do not need power supply, and when pallet-side batteries are mounted on all pallets used. Also, there is a possibility that power is wasted even for an automated guided vehicle that does not require power supply. That is, when the automatic guided vehicle transports the load, since the power supply from the power supply device (pallet side battery) is always performed to the automatic guided vehicle (vehicle side battery), there is a problem that the efficiency of power supply is low.
本発明は、上記事情に鑑みてなされたものであって、給電装置から無人搬送車への給電の効率性を向上させることが可能な給電システムおよび給電方法を提供することを課題とする。 This invention is made | formed in view of the said situation, Comprising: It aims at providing the electric power feeding system and electric power feeding method which can improve the efficiency of the electric power feeding from an electric power feeder to an automatic guided vehicle.
上記課題を解決するため、請求項1に記載の発明は、荷物を搬送するために走行する無人搬送車と、前記無人搬送車の運行を管理する管理装置と、前記無人搬送車により搬送されるとともに当該無人搬送車に給電する給電装置と、を備える給電システムであって、
前記管理装置は、前記無人搬送車が荷物を引き渡す荷卸場所から他の荷物を受け取る荷積場所までの当該無人搬送車の移動時間が所定時間以上となるとき、当該移動時間中での前記給電装置の搬送を前記無人搬送車に指示するための給電スケジュールを生成する給電スケジュール生成部と、前記給電スケジュールを前記無人搬送車に送信する給電スケジュール送信部と、を備え、前記無人搬送車は、前記管理装置から送信された前記給電スケジュールを受信する給電スケジュール受信部と、受信した前記給電スケジュールに基づいて前記給電装置を搬送するように当該無人搬送車の動作を制御する制御部と、前記給電装置の搬送中に当該給電装置から供給される電力を蓄電するバッテリと、を備えることを特徴とする。
In order to solve the above-mentioned problem, the invention described in claim 1 is conveyed by the automatic guided vehicle that travels to transport the load, the management device that manages the operation of the automatic guided vehicle, and the automatic guided vehicle. And a power feeding system that feeds power to the automatic guided vehicle,
The power supply device during the movement time when the movement time of the automatic guided vehicle from the unloading place where the automatic guided vehicle delivers the load to the loading place where the other load is received becomes a predetermined time or more. A power supply schedule generating unit that generates a power supply schedule for instructing the automatic guided vehicle to convey the power supply, and a power supply schedule transmitting unit that transmits the power supply schedule to the automatic guided vehicle. A power supply schedule receiving unit that receives the power supply schedule transmitted from a management device, a control unit that controls the operation of the automatic guided vehicle so as to convey the power supply device based on the received power supply schedule, and the power supply device And a battery for storing electric power supplied from the power supply device during the conveyance of the battery.
請求項2に記載の発明は、請求項1に記載の給電システムにおいて、前記給電スケジュールは、前記無人搬送車が前記給電装置を受け取る受取場所に係る情報と、前記無人搬送車が前記給電装置を引き渡す引渡場所に係る情報とを少なくとも含み、前記制御部は、前記給電スケジュールに基づいて、前記給電装置を前記受取場所から前記引渡場所まで搬送するように前記無人搬送車の動作を制御することを特徴とする。 According to a second aspect of the present invention, in the power feeding system according to the first aspect, the power feeding schedule includes information on a receiving location where the automatic guided vehicle receives the power feeding device, and the automatic guided vehicle determines the power feeding device. At least information related to the delivery location, and the control unit controls the operation of the automatic guided vehicle to transport the power feeding device from the receiving location to the delivery location based on the power feeding schedule. Features.
請求項3に記載の発明は、請求項1または2に記載の給電システムにおいて、前記給電スケジュール生成部は、前記バッテリの蓄電量が所定量未満になる時期を推測し、前記バッテリの蓄電量が所定量未満の状態で前記移動時間が所定時間以上となるとき、当該移動時間中での前記給電装置の搬送を指示するための前記給電スケジュールを生成することを特徴とする。 According to a third aspect of the present invention, in the power supply system according to the first or second aspect, the power supply schedule generation unit estimates a time when the charged amount of the battery is less than a predetermined amount, and the charged amount of the battery is When the movement time is equal to or longer than a predetermined time in a state of less than a predetermined amount, the power supply schedule for instructing conveyance of the power supply apparatus during the movement time is generated.
請求項4に記載の発明は、請求項1〜3のいずれか一項に記載の給電システムにおいて、前記給電装置は、マイクロ波の送信により送電する無線送電部をさらに備え、前記無人搬送車は、マイクロ波の受信により受電する無線受電部をさらに備えることを特徴とする。 Invention of Claim 4 is the electric power feeding system as described in any one of Claims 1-3, The said electric power feeder is further equipped with the wireless power transmission part which transmits electric power by transmission of a microwave, The said automatic guided vehicle is And a wireless power receiving unit that receives power by receiving microwaves.
請求項5に記載の発明は、請求項1〜4のいずれか一項に記載の給電システムにおいて、前記管理装置は、前記給電装置の受取場所に係る情報を含む前記給電スケジュールを生成するために、前記給電装置の位置情報を格納する情報格納部と、前記無人搬送車による前記給電装置の搬送に基づいて、前記情報格納部に格納された前記給電装置の位置情報を更新する情報更新部と、を備えることを特徴とする。 According to a fifth aspect of the present invention, in the power supply system according to any one of the first to fourth aspects, the management device generates the power supply schedule including information related to a receiving location of the power supply device. An information storage unit that stores position information of the power supply device, and an information update unit that updates the position information of the power supply device stored in the information storage unit based on the conveyance of the power supply device by the automatic guided vehicle. It is characterized by providing.
請求項6に記載の発明は、荷物を搬送するために走行する無人搬送車と、前記無人搬送車の運行を管理する管理装置と、前記無人搬送車により搬送される給電装置とを備える給電システムにおいて、前記給電装置によって前記無人搬送車に給電する給電方法であって、前記無人搬送車が荷物を引き渡す荷卸場所から他の荷物を受け取る荷積場所までの当該無人搬送車の移動時間が所定時間以上となるとき、当該移動時間中での前記給電装置の搬送を前記無人搬送車に指示するための給電スケジュールを前記管理装置が生成する給電スケジュール生成ステップと、前記給電スケジュールを前記管理装置が送信する給電スケジュール送信ステップと、送信された前記給電スケジュールを前記無人搬送車が受信する給電スケジュール受信ステップと、受信した前記給電スケジュールに基づいて、前記無人搬送車が前記給電装置を搬送するとともに、前記給電装置が当該給電装置を搬送中の前記無人搬送車が備えるバッテリに給電する給電ステップとを備えることを特徴とする。 A power supply system comprising: an automatic guided vehicle that travels to transport a load; a management device that manages operation of the automatic guided vehicle; and a power supply device that is transported by the automatic guided vehicle. The power supply method of supplying power to the automatic guided vehicle by the power supply device, wherein the automatic guided vehicle travels from the unloading place where the automatic guided vehicle delivers the load to the loading place where another load is received for a predetermined time. When this is the case, the management device generates a power supply schedule for generating a power supply schedule for instructing the automatic guided vehicle to convey the power supply device during the travel time, and the management device transmits the power supply schedule. A power supply schedule transmission step, a power supply schedule reception step in which the automatic guided vehicle receives the transmitted power supply schedule, and The automatic guided vehicle transports the power feeding device based on the received power feeding schedule, and the power feeding device includes a power feeding step of feeding power to a battery included in the automatic guided vehicle that is transporting the power feeding device. Features.
本発明によれば、給電装置から無人搬送車への給電の効率性を向上させることが可能な給電システムおよび給電方法を提供することができる。 ADVANTAGE OF THE INVENTION According to this invention, the electric power feeding system and electric power feeding method which can improve the efficiency of the electric power feeding from an electric power feeder to an automatic guided vehicle can be provided.
図面を参照して、本発明の実施形態を説明する。
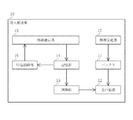
図1に示すように、給電システム1は、荷物を搬送するために走行する無人搬送車10と、無人搬送車10の運行を管理する管理装置20と、無人搬送車10により搬送されるとともに無人搬送車10に給電する複数の給電装置30とを備えている。
Embodiments of the present invention will be described with reference to the drawings.
As shown in FIG. 1, the power feeding system 1 includes an
無人搬送車10は、昇降可能な荷役用のフォークを備えた無人フォークリフトである。無人搬送車10は、管理装置20から受信した荷役スケジュールに基づき、荷物を荷積場所から荷卸場所まで搬送する。無人搬送車10は、荷卸場所で荷物を引き渡して搬送を終了した後は、他の荷物を受け取るための荷積場所に移動し、荷積場所で荷物を受け取って搬送を開始する。こうして、無人搬送車10は、荷物を搬送する荷物搬送動作と荷物を搬送しない移動動作とを交互に繰り返す。
The automatic guided
なお、荷積場所および荷卸場所は、例えば、自動倉庫に荷物を入庫するための入庫ステーションP1、荷物を保管するラックが設けられた荷物保管場所P2、および、自動倉庫から荷物を出庫するための出庫ステーションP3のいずれかである。荷積場所が入庫ステーションP1であるとき、荷卸場所は荷物保管場所P2であり、荷積場所が荷物保管場所P2であるとき、荷卸場所は出庫ステーションP3である。 The loading place and the unloading place are, for example, a loading station P1 for loading a baggage into an automatic warehouse, a baggage storage location P2 provided with a rack for storing the baggage, and a baggage storage box from the automatic warehouse. One of the delivery stations P3. When the loading location is the receiving station P1, the unloading location is the luggage storage location P2, and when the loading location is the luggage storage location P2, the loading location is the delivery station P3.
また、無人搬送車10は、管理装置20から受信した給電スケジュールに基づき、荷物の搬送を終了した後かつ他の荷物の搬送を開始する前に、給電装置30を搬送する。すなわち、無人搬送車10は、荷卸場所から荷積場所までの無人搬送車10の移動時間中に、給電装置30を受取場所から引渡場所まで搬送する。すなわち、無人搬送車10は、受取場所で給電装置30を受け取って、受取場所から離れた引渡場所で給電装置30を引き渡す。無人搬送車10は、給電装置30の搬送中に、その給電装置30から電力の供給を受ける。こうして、無人搬送車10は、給電装置30を搬送する給電装置搬送動作を行う。
Further, based on the power supply schedule received from the
なお、給電装置30の受取場所および引渡場所は、給電装置30を保管するラックが設けられた給電装置保管場所Qである。無人搬送車10が荷物を引き渡した後に給電装置30を速やかに受け取れるように、給電装置30の受取場所は荷卸場所の近傍に設けられている。また、無人搬送車10が給電装置30を引き渡した後に荷物を速やかに受け取れるように、給電装置30の引渡場所は荷積場所の近傍に設けられている。
The receiving place and the delivery place of the
管理装置20は、サーバ20Aと、無人搬送車10とサーバ20Aとの通信を中継する複数のアクセスポイント20Bとにより構成されており、無人搬送車10に荷役スケジュールおよび給電スケジュールを送信することで無人搬送車10の運行を管理する。サーバ20Aは、管理者から入力された情報に基づいて荷物スケジュールを生成し、搬送スケジュールに基づいて給電スケジュールを生成する。サーバ20Aは、分散して配置された複数のアクセスポイント20Bのいずれかを介して、無人搬送車10に荷役スケジュールおよび給電スケジュールを送信する。
The
給電装置30は、複数の受取場所に分散して配置されている。すなわち、少なくとも1つの給電装置30が、荷卸場所の近傍に位置する給電装置30の受取場所に配置されている。給電装置30は、その給電装置30を搬送中の無人搬送車10に給電する。
The
図2に示すように、無人搬送車10は、バッテリ11と、走行装置12と、無線通信部13と、記憶部14と、制御部15と、給電制御部16と、無線受電部17とを備えている。無人搬送車10は、バッテリ11の蓄電量が低下したとき、給電装置30から給電を受ける。
As shown in FIG. 2, the automatic guided
バッテリ11は、蓄電可能な二次電池により構成されており、走行装置12等に電力を供給する。バッテリ11は、給電装置30の搬送中に当該給電装置30から供給される電力を蓄電する。バッテリ11の蓄電量は、走行装置12等へ電力を供給することで減り、給電装置30から供給された電力を蓄電することで増える。
The
走行装置12は、無人搬送車10が走行するための走行モータ(図示略)や、無人搬送車10が走行する方向を変える操舵モータ(図示略)等により構成されている。走行装置12は、バッテリ11から電力が供給されることにより動作する。
The traveling
無線通信部13は、給電スケジュールを受信する給電スケジュール受信部であって、管理装置20および給電装置30と通信するための小型アンテナを備えた無線通信モジュールにより構成されている。無線通信部13は、管理装置20から送信された荷役スケジュールおよび給電スケジュールを受信する。また、無線通信部13は、給電制御部16の指示に従って、給電要求信号および給電停止信号を給電装置30に送信する。
The
記憶部14は、無線通信部13で受信した荷役スケジュールおよび給電スケジュールに係る情報を記憶する記憶装置(例えば半導体メモリ)により構成されている。記憶部14は、荷役スケジュールに係る情報として、荷物の搬送作業の順序の情報と、荷物の荷積場所の情報、荷物の荷卸場所の情報とを記憶する。また、記憶部14は、給電スケジュールに係る情報として、給電装置30を搬送する時期の情報と、給電装置30の受取場所の情報と、給電装置30の引渡場所の情報とを記憶する。
The
制御部15は、走行装置12を制御する集積回路により構成されている。制御部15は、記憶部14に記憶された荷役スケジュールに基づいて、無人搬送車10が荷物を荷積場所から荷卸場所まで搬送するように走行装置12を制御する。すなわち、制御部15は、管理装置20から受信した荷役スケジュールに基づいて、荷物を荷積場所から荷卸場所搬送するように無人搬送車10の動作を制御する。また、制御部15は、記憶部14に記憶された給電スケジュールに基づいて、無人搬送車10が給電装置30を受取場所から引渡場所まで搬送するように走行装置12を制御する。すなわち、制御部15は、管理装置20から受信した給電スケジュールに基づいて、給電装置30を受取場所から引渡場所まで搬送するように無人搬送車10の動作を制御する。
The
給電制御部16は、無線通信部13を制御する集積回路により構成されている。給電制御部16は、記憶部14に記憶された給電スケジュールに基づいて、無人搬送車10が給電装置30の搬送を開始する場合に、給電要求信号を送信するように無線通信部13を制御する。また、給電制御部16は、給電装置30からの受電中にバッテリ11の充電が完了した場合、または、無人搬送車10が給電装置30の搬送を終了する場合に、給電停止信号を送信するように無線通信部13を制御する。
The power
無線受電部17は、マイクロ波を受信するレクテナにより構成されている。無線受電部17は、給電装置30から受信したマイクロ波を電気エネルギーに変換することで、給電装置30から電力を受電する。そして、無線受電部17は、給電装置30から受電した電力をバッテリ11に供給する。こうして、バッテリ11が充電される。
The wireless
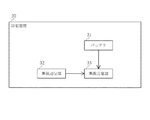
図3に示すように、管理装置20は、サーバ20Aに設けられた情報格納部21と、荷役スケジュール生成部22と、給電スケジュール生成部23と、情報更新部24とを備えるとともに、アクセスポイント20Bに設けられた無線通信部25とを備えている。
As shown in FIG. 3, the
情報格納部21は、無人搬送車10が搬送すべき荷物に係る情報と給電装置30に係る情報とを記憶する記憶装置(例えばハードディスクドライブ)により構成されている。情報格納部21は、荷物に係る情報として、搬送すべき荷物毎に、荷物を受け取る荷積場所の情報と、その荷物を引き渡す荷卸場所の情報と、その荷物の重さの情報と、荷積場所または荷卸場所のラックにおけるその荷物の格納位置の情報とを格納している。また、情報格納部21は、給電スケジュールを生成するために、給電装置30に係る情報として、給電装置30の位置情報、すなわち給電装置30を受け取ることが可能な受取場所の情報とを格納している。荷物に係る情報、および、給電装置30に係る情報は、管理用情報端末装置(図示略)から管理装置20に入力されて、情報格納部21に格納される。
The
荷役スケジュール生成部22は、情報格納部21に格納されている荷物に係る情報に基づいて、無人搬送車10の荷役スケジュールを生成する集積回路により構成されている。荷役スケジュールには、複数の荷物の搬送順序の情報と、無人搬送車10が荷物を受け取る荷積場所に係る情報と、および、無人搬送車10が荷物を引き渡す荷卸場所に係る情報とが含まれる。したがって、荷役スケジュールには、複数回の荷物搬送動作および複数回の移動動作を無人搬送車10に指示するための情報が含まれている。
The cargo handling
給電スケジュール生成部23は、情報格納部21に格納されている給電装置30に係る情報と、荷役スケジュール生成部22で生成された荷役スケジュールとに基づいて、給電スケジュールを生成する集積回路により構成されている。給電スケジュールには、無人搬送車10が給電装置30を搬送する時期の情報と、無人搬送車10が給電装置30を受け取る受取場所に係る情報と、および、無人搬送車10が給電装置30を引き渡す引渡場所に係る情報とが含まれる。したがって、給電スケジュールには、少なくとも1回の給電装置搬送動作を無人搬送車10に指示するための情報が含まれている。
The power supply
情報更新部24は、情報格納部21に格納された情報を適宜更新する集積回路により構成されている。情報更新部24は、荷役スケジュール生成部22で生成された荷役スケジュールに基づいて、無人搬送車10が荷物搬送動作を終了したときに、荷物に係る情報(例えば荷物の位置情報)を更新する。また、情報更新部24は、給電スケジュール生成部23で生成された給電スケジュールに基づいて、無人搬送車10が移動動作を終了したときに、給電装置30に係る情報(例えば給電装置30を受け取ることが可能な受取場所の情報)を更新する。すなわち、情報更新部24は、無人搬送車10による給電装置30の搬送に基づいて、情報格納部21に格納された給電装置30の位置情報に係る情報を更新する。
The
無線通信部25は、給電スケジュールを送信する給電スケジュール送信部であって、無人搬送車10と通信するための小型アンテナを備えた無線通信モジュールにより構成されている。無線通信部25は、複数回の荷物の搬送を無人搬送車10に指示するために、荷役スケジュール生成部22で生成した荷役スケジュールを無人搬送車10に送信する。また、無線通信部25は、少なくとも1回の給電装置30の搬送を無人搬送車10に指示するために、給電スケジュール生成部23で生成した給電スケジュールを無人搬送車10に送信する。
The
図4に示すように、給電装置30は、バッテリ31と、無線通信部32と、無線送電部33とを備えている。給電装置30は、無線送電部33から送電することで無人搬送車10に給電する。
As illustrated in FIG. 4, the
バッテリ31は、蓄電可能な二次電池により構成されており、無線送電部33に電力を供給する。バッテリ31の蓄電量は、無線送電部33に電力を供給することで減り、給電装置30に接続される充電設備(図示略)を用いて回復することができる。
The
無線通信部32は、無人搬送車10と通信するための小型アンテナを備えた無線通信モジュールにより構成されている。無線通信部32は、無人搬送車10から送信された給電要求信号および給電停止信号を受信する。
The
無線送電部33は、マイクロ波を送信する送電アンテナにより構成されており、バッテリ31から供給される電力によりマイクロ波を送信することで、無人搬送車10に送電する。無線送電部33は、無線通信部32で無線要求信号を受信した場合、マイクロ波による送電を開始する。また、無線送電部33は、無線通信部32で無線停止信号を受信した場合、マイクロ波による送電を停止する。
The wireless
次に、給電スケジュール生成部23による給電スケジュールの生成アルゴリズムを説明する。
まず、給電スケジュール生成部23は、荷役スケジュール生成部22で生成された荷役スケジュールと、情報格納部21に格納されている荷物に係る情報とに基づいて、無人搬送車10のバッテリ11の蓄電量が所定量A未満になる時期を予測する。すなわち、給電スケジュール生成部23は、荷積場所および荷卸場所の情報から算出される無人搬送車10が走行する距離と、搬送する荷物の重さと、荷積時および荷卸時におけるフォークのリフト量とに基づいて、無人搬送車10の消費電力の経時変化を推定することで、バッテリ11の蓄電量が所定量A未満になる時期を予測する。
Next, an algorithm for generating a power supply schedule by the power supply
First, the power supply
バッテリ11の蓄電量が所定量A未満になる時期が予測されなかった場合、すなわち、バッテリ11の蓄電量が所定量A未満にならないと予測された場合は、給電スケジュール生成部23は、無人搬送車10に給電を行う必要がないと判断して、給電スケジュールを生成しない。
When the time when the stored amount of the
一方、バッテリ11の蓄電量が所定量A未満になる時期が予測された場合、給電スケジュール生成部23は、バッテリ11の蓄電量が所定量A未満になる時期において、荷卸場所から荷積場所までの移動時間が所定時間T以上になる区間を検索する。すなわち、給電スケジュール生成部23は、荷卸場所および荷積場所の情報から算出される無人搬送車10が走行する距離に基づいて、荷卸場所から荷積場所までの移動時間を試算することで、当該移動時間が所定時間T以上となる区間を検索する。
On the other hand, when the time when the charged amount of the
荷卸場所から荷積場所までの移動時間が所定時間T以上になる区間が検索されなかった場合、すなわち、荷卸場所から荷積場所までの各区間の移動時間が所定時間T未満になる場合は、給電スケジュール生成部23は、所定時間Tを短くして、荷卸場所から荷積場所までの移動時間が所定時間T以上になる区間を再度検索する。
When the section where the moving time from the unloading place to the loading place is not more than the predetermined time T is not searched, that is, when the moving time of each section from the unloading place to the loading place is less than the predetermined time T, The power supply
一方、荷卸場所から荷積場所までの移動時間が所定時間T以上になる区間が検索された場合、給電スケジュール生成部23は、その区間での給電装置搬送動作を無人搬送車10に指示するための情報を含んだ給電スケジュールを生成する。以上のようにして、給電スケジュール生成部23は、無人搬送車10が荷物を引き渡す荷卸場所から他の荷物を受け取る荷積場所までの無人搬送車10の移動時間が所定時間T以上となるとき、当該移動時間中での給電装置30の搬送を指示するための給電スケジュールを生成する。また、本実施形態では、給電スケジュール生成部23は、バッテリ11の蓄電量が所定量A未満になる時期を推測し、バッテリ11の蓄電量が所定量A未満の状態で荷物を搬送しない移動動作に係る移動時間が所定時間T以上となるとき、給電スケジュールを生成する。
On the other hand, when a section in which the travel time from the unloading place to the loading place is searched for a predetermined time T or more is searched, the power supply
次に、図5を参照して、給電スケジュールに基づいて無人搬送車10の動作の一例を説明する。
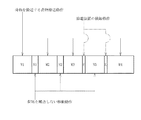
図5に示すように、実施例に係る無人搬送車10は、管理装置20で生成された荷役スケジュールに基づいて、荷物搬送動作M1、荷物搬送動作M2、荷物搬送動作M3、および、荷物搬送動作M4を順番に行う。また、無人搬送車10は、管理装置20で生成された給電スケジュールに基づいて、荷物搬送動作M1の終了後かつ荷物搬送動作M2の開始前に移動動作N1を行い、荷物搬送動作M2の終了後かつ荷物搬送動作M3の開始前に移動動作N2、荷物搬送動作M3の終了後かつ荷物搬送動作M4の開始前に移動動作N3を順番に行う。移動動作N1に係る荷卸場所から荷積場所までの移動時間、および、移動動作N2に係る荷卸場所から荷積場所までの移動時間は、それぞれ、所定時間T未満であり、移動動作N3に係る荷卸場所から荷積場所までの移動時間は、所定時間T以上である。
Next, an example of the operation of the automatic guided
As shown in FIG. 5, the automatic guided
無人搬送車10の荷物搬送動作M1中にバッテリ11の蓄電料が所定量A未満になると推測される場合、移動動作N3に係る移動時間が所定時間T以上であるため、給電スケジュール生成部23は、移動動作N3に係る移動時間中での給電装置30の搬送を指示するための給電スケジュールを生成する。したがって、無人搬送車10は、給電スケジュールに基づいて、荷物搬送動作M3の終了後に、荷卸場所の近傍に位置する受取場所で給電装置30を受け取り、移動動作N3に係る移動時間中に給電装置30から給電を受け、荷物搬送動作M4の開始前に、荷積場所の近傍に位置する引渡場所で給電装置30を引き渡す。すなわち、無人搬送車10は、荷物搬送動作M3の終了後かつ移動動作N3の開始前と、移動動作N3の終了後かつ荷物搬送動作M4の開始前とで、給電装置30の積卸動作Eを行い、移動動作N3に係る区間で給電装置搬送動作を行う。
When it is estimated that the storage charge of the
図6は、比較例に係る無人搬送車の動作の流れを示している。
比較例に係る無人搬送車10は、実施例と同様に、荷物搬送動作M1、移動動作N1、荷物搬送動作M2、移動動作N2、荷物搬送動作M3、移動動作N3、および、荷物搬送動作M4を順番に行う。
FIG. 6 shows an operation flow of the automatic guided vehicle according to the comparative example.
Similarly to the embodiment, the automatic guided
比較例の無人搬送車10は、荷物搬送動作M1の終了後に給電装置30を受け取り、移動動作N1に係る移動時間中に給電装置30から給電を受け、荷物搬送動作M2の開始前に給電装置30を引き渡す。さらに、比較例の無人搬送車10は、移動動作N1に係る移動時間中ではバッテリ11への蓄電量が十分回復しないため、荷物搬送動作M2の終了後に給電装置30を受け取り、移動動作N2に係る移動時間中に給電装置30から給電を受け、荷物搬送動作M2の開始前に給電装置30を引き渡す。したがって、比較例の無人搬送車10は、上記実施例に比べて、給電装置30の積卸動作Eに係る合計時間が長くなり、無人搬送車10の稼働時間が長くなる。
The automatic guided
以上のように構成された給電システム1において、給電装置30によって無人搬送車10に給電する給電方法は、下記(S1)〜(S4)のステップを備える。
(S1)荷卸場所から荷積場所までの無人搬送車10の移動時間が所定時間T以上となるとき、その移動時間中での給電装置30の搬送を指示するための給電スケジュールを管理装置20が生成する給電スケジュール生成ステップ
(S2)給電装置30の搬送を無人搬送車10に指示するために、給電スケジュールを管理装置20が送信する給電スケジュール送信ステップ
(S3)送信された給電スケジュールを無人搬送車10が受信する給電スケジュール受信ステップ
(S4)受信した給電スケジュールに基づいて、無人搬送車10が給電装置30を搬送するとともに、給電装置30がその給電装置30を搬送中の無人搬送車10が備えるバッテリ11に給電する給電ステップ
In the power feeding system 1 configured as described above, the power feeding method for feeding power to the automatic guided
(S1) When the movement time of the automated guided
本実施形態においては以下の効果が得られる。
(1)無人搬送車10は、荷卸場所から荷積場所までの当該無人搬送車10の移動時間が所定時間T以上となるとき、当該移動時間中での給電装置30の搬送を指示するための給電スケジュールに基づいて、給電装置30を搬送する。そして、給電装置30は、当該給電装置30を搬送中の無人搬送車10に給電する。このため、荷卸場所から荷積場所までの当該無人搬送車10の移動時間が所定時間T以上確保できるときに、給電装置30から供給される電力をバッテリ11に蓄電させることができ、荷物を搬送する際にバッテリへの給電が常時行われる構成に比べて、給電装置30からバッテリ11への給電の効率性を高めることができる。また、無人搬送車10が給電装置30を搬送する回数を少なくすることができ、給電装置30の積卸動作Eに係る合計時間を短くすることによって、無人搬送車10の稼働時間を短くすることができる。
In the present embodiment, the following effects can be obtained.
(1) The automatic guided
(2)無人搬送車10は、管理装置20から受信した給電装置30の受取場所および引渡場所に係る情報に基づいて、給電装置30を受取場所から引渡場所に搬送するため、管理装置20は、引渡場所で保管される給電装置30の個数を管理することができる。
(2) Since the automatic guided
(3)給電装置30から無人搬送車10への給電がマイクロ波で行われるため、無人搬送車10と給電装置30とを有線で接続することなく、給電装置30から供給される電力をバッテリ11に蓄電することができる。
(3) Since power feeding from the
(4)情報更新部24は、無人搬送車10による給電装置30の搬送に基づいて、情報格納部21に格納された給電装置30の位置情報を更新するため、給電装置30の位置情報が自動で更新される。
(4) Since the
本発明は、上記実施形態に限定されるものではなく、上記構成を変更することもできる。例えば、以下のように変更して実施することもでき、以下の変更を組み合わせて実施することもできる。 The present invention is not limited to the above embodiment, and the above configuration can be changed. For example, the following modifications can be implemented, and the following modifications can be combined.
・マイクロ波以外の手段で給電装置30から無人搬送車10に給電するように構成してもよい。例えば、電磁誘導方式または電磁界共鳴方式により給電装置30から無人搬送車10に給電するように構成してもよい。また、給電装置30から無人搬送車10に有線で給電するように構成してもよい。
-You may comprise so that electric power may be supplied to the automatic guided
・搬送の搬送システムの規模に応じて、無人搬送車10、アクセスポイント20B、給電装置30の個数を適宜変更してもよく、無人搬送車10、アクセスポイント20B、給電装置30は、それぞれ1つであってもよい。また、アクセスポイント20Bを省略して、無人搬送車10とサーバ20Aとが直接通信を行う構成を採用することもできる。
The number of the automatic guided
・無人搬送車10と給電装置30とが通信する構成に代えて、管理装置20と給電装置30とが通信する構成を採用してもよい。この場合、管理装置20が、無人搬送車10に代えて給電要求信号および給電停止信号を給電装置30に送信する。また、無人搬送車10と給電装置30とが管理装置20を介して通信する構成を採用してもよい。
-Instead of the configuration in which the automatic guided
・給電スケジュールに給電装置30の引渡場所に係る情報を含まないように構成してもよい。この場合には、給電装置30を受け取った無人搬送車10が、常に所定の場所で給電装置30を引き渡すように構成することができる。
-You may comprise so that the information regarding the delivery place of the
・荷物を保管するラックが給電装置30を保管するラックを兼ねていてもよい。このようにして、荷卸場所と給電装置30の受取場所とが同じであることが好ましく、また、荷積場所と給電装置30の引渡場所とが同じであることが好ましい。また、無人フォークリフト以外の無人搬送車(例えば、積載型の無人搬送車や牽引型の無人搬送車)に本発明を適用することもできる。
The rack that stores the luggage may also serve as the rack that stores the
1 給電システム
10 無人搬送車
11 バッテリ
13 無線通信部(給電スケジュール受信部)
15 制御部
17 無線受電部
20 管理装置
21 情報格納部
23 給電スケジュール生成部
24 情報更新部
25 無線通信部(給電スケジュール送信部)
30 給電装置
33 無線送電部
DESCRIPTION OF SYMBOLS 1
DESCRIPTION OF
30
Claims (6)
前記無人搬送車の運行を管理する管理装置と、
前記無人搬送車により搬送されるとともに当該無人搬送車に給電する給電装置と、を備える給電システムであって、
前記管理装置は、
前記無人搬送車が荷物を引き渡す荷卸場所から他の荷物を受け取る荷積場所までの当該無人搬送車の移動時間が所定時間以上となるとき、当該移動時間中での前記給電装置の搬送を前記無人搬送車に指示するための給電スケジュールを生成する給電スケジュール生成部と、
前記給電スケジュールを前記無人搬送車に送信する給電スケジュール送信部と、を備え、
前記無人搬送車は、
前記管理装置から送信された前記給電スケジュールを受信する給電スケジュール受信部と、
受信した前記給電スケジュールに基づいて前記給電装置を搬送するように当該無人搬送車の動作を制御する制御部と、
前記給電装置の搬送中に当該給電装置から供給される電力を蓄電するバッテリと、を備える
ことを特徴とする給電システム。 An automated guided vehicle that travels to transport luggage,
A management device for managing the operation of the automatic guided vehicle;
A power feeding system comprising a power feeding device that is transported by the automatic guided vehicle and feeds power to the automatic guided vehicle,
The management device
When the unmanned transport vehicle travels from the unloading place where the unmanned transport vehicle delivers the package to the loading site where another package is received, the unmanned transport vehicle transfers the unmanned transport device during the travel time. A power supply schedule generation unit that generates a power supply schedule for instructing the transport vehicle;
A power supply schedule transmission unit that transmits the power supply schedule to the automatic guided vehicle,
The automatic guided vehicle is
A power supply schedule receiving unit that receives the power supply schedule transmitted from the management device;
A control unit for controlling the operation of the automatic guided vehicle so as to transport the power feeding device based on the received power feeding schedule;
A battery that stores electric power supplied from the power supply apparatus during conveyance of the power supply apparatus.
前記制御部は、前記給電スケジュールに基づいて、前記給電装置を前記受取場所から前記引渡場所まで搬送するように前記無人搬送車の動作を制御する
ことを特徴とする請求項1に記載の給電システム。 The power supply schedule includes at least information related to a receiving location where the automatic guided vehicle receives the power supply device, and information related to a delivery location where the automatic guided vehicle delivers the power supply device,
2. The power feeding system according to claim 1, wherein the control unit controls the operation of the automatic guided vehicle so as to transport the power feeding device from the receiving location to the delivery location based on the power feeding schedule. .
ことを特徴とする請求項1または2に記載の給電システム。 The power supply schedule generation unit estimates a time when the storage amount of the battery is less than a predetermined amount, and when the movement time is equal to or longer than a predetermined time in a state where the storage amount of the battery is less than a predetermined amount, The power supply system according to claim 1, wherein the power supply schedule for instructing conveyance of the power supply apparatus is generated.
前記無人搬送車は、マイクロ波の受信により受電する無線受電部をさらに備える
ことを特徴とする請求項1〜3のいずれか一項に記載の給電システム。 The power supply apparatus further includes a wireless power transmission unit that transmits power by transmission of microwaves,
The power supply system according to any one of claims 1 to 3, wherein the automatic guided vehicle further includes a wireless power receiving unit that receives power by receiving microwaves.
前記給電装置の受取場所に係る情報を含む前記給電スケジュールを生成するために、前記給電装置の位置情報を格納する情報格納部と、
前記無人搬送車による前記給電装置の搬送に基づいて、前記情報格納部に格納された前記給電装置の位置情報を更新する情報更新部と、を備える
ことを特徴とする請求項1〜4のいずれか一項に記載の給電システム。 The management device
An information storage unit for storing position information of the power supply device in order to generate the power supply schedule including information relating to a receiving location of the power supply device;
The information update part which updates the positional information on the said electric power feeder stored in the said information storage part based on conveyance of the said electric power feeder by the said automatic guided vehicle is provided. The any one of Claims 1-4 characterized by the above-mentioned. The power feeding system according to claim 1.
前記無人搬送車が荷物を引き渡す荷卸場所から他の荷物を受け取る荷積場所までの当該無人搬送車の移動時間が所定時間以上となるとき、当該移動時間中での前記給電装置の搬送を前記無人搬送車に指示するための給電スケジュールを前記管理装置が生成する給電スケジュール生成ステップと、
前記給電スケジュールを前記管理装置が送信する給電スケジュール送信ステップと、
送信された前記給電スケジュールを前記無人搬送車が受信する給電スケジュール受信ステップと、
受信した前記給電スケジュールに基づいて、前記無人搬送車が前記給電装置を搬送するとともに、前記給電装置が当該給電装置を搬送中の前記無人搬送車が備えるバッテリに給電する給電ステップとを備える
ことを特徴とする給電方法。 In a power supply system comprising: an automatic guided vehicle that travels to transport a load; a management device that manages operation of the automatic guided vehicle; and a power supply device that is transported by the automatic guided vehicle. A power supply method for supplying power to a car,
When the unmanned transport vehicle travels from the unloading place where the unmanned transport vehicle delivers the package to the loading site where another package is received, the unmanned transport vehicle is transported by the unmanned transport vehicle during the travel time. A power supply schedule generating step in which the management device generates a power supply schedule for instructing the transport vehicle;
A power supply schedule transmission step in which the management device transmits the power supply schedule; and
A power supply schedule receiving step in which the automatic guided vehicle receives the transmitted power supply schedule; and
A power feeding step in which the automatic guided vehicle transports the power feeding device based on the received power feeding schedule, and the power feeding device feeds power to a battery included in the automatic guided vehicle that is transporting the power feeding device. Characteristic power supply method.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016075993A JP6061319B1 (en) | 2016-04-05 | 2016-04-05 | Power feeding system and power feeding method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016075993A JP6061319B1 (en) | 2016-04-05 | 2016-04-05 | Power feeding system and power feeding method |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP6061319B1 JP6061319B1 (en) | 2017-01-18 |
| JP2017189014A true JP2017189014A (en) | 2017-10-12 |
Family
ID=57800117
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016075993A Active JP6061319B1 (en) | 2016-04-05 | 2016-04-05 | Power feeding system and power feeding method |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6061319B1 (en) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020175737A (en) * | 2019-04-17 | 2020-10-29 | 三菱ロジスネクスト株式会社 | Power supply system for unmanned flight body and control device |
| JP2020175738A (en) * | 2019-04-17 | 2020-10-29 | 三菱ロジスネクスト株式会社 | Power supply system for unmanned flight body and control device |
| WO2021261043A1 (en) * | 2020-06-26 | 2021-12-30 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカ | Control method, control device, and program |
| JP2023047501A (en) * | 2021-09-27 | 2023-04-06 | 三菱ロジスネクスト株式会社 | cargo handling system |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0412604A (en) * | 1990-04-27 | 1992-01-17 | Shinko Electric Co Ltd | Charging method for unmanned carrier |
| JP2013033403A (en) * | 2011-08-02 | 2013-02-14 | Denso Corp | Power charge/discharge system |
-
2016
- 2016-04-05 JP JP2016075993A patent/JP6061319B1/en active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0412604A (en) * | 1990-04-27 | 1992-01-17 | Shinko Electric Co Ltd | Charging method for unmanned carrier |
| JP2013033403A (en) * | 2011-08-02 | 2013-02-14 | Denso Corp | Power charge/discharge system |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020175737A (en) * | 2019-04-17 | 2020-10-29 | 三菱ロジスネクスト株式会社 | Power supply system for unmanned flight body and control device |
| JP2020175738A (en) * | 2019-04-17 | 2020-10-29 | 三菱ロジスネクスト株式会社 | Power supply system for unmanned flight body and control device |
| WO2021261043A1 (en) * | 2020-06-26 | 2021-12-30 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカ | Control method, control device, and program |
| JP2023047501A (en) * | 2021-09-27 | 2023-04-06 | 三菱ロジスネクスト株式会社 | cargo handling system |
| JP7327895B2 (en) | 2021-09-27 | 2023-08-16 | 三菱ロジスネクスト株式会社 | cargo handling system |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6061319B1 (en) | 2017-01-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6061319B1 (en) | Power feeding system and power feeding method | |
| US9481258B2 (en) | Vehicle and wireless power supply system | |
| CN106335756B (en) | Article conveying equipment | |
| TWI380940B (en) | Article transport facility and method for controlling same | |
| KR101639678B1 (en) | Delivery vehicle system and charge method for delivery vehicle | |
| WO2015137502A1 (en) | Electric power supply system program, electric power supply device, parking device program, and parking device | |
| JP2012239334A (en) | Vehicle and non contact power supply system | |
| JP2014142704A (en) | Travelling control system for unmanned carrier | |
| JP2009050076A (en) | Charging system and charging method | |
| JP2021160905A (en) | Charging system for unmanned fork lift | |
| JP5445411B2 (en) | Conveyance system and cart allocation method | |
| JP5655700B2 (en) | Transport system | |
| JP6045004B1 (en) | Wireless power feeding system and wireless power feeding method | |
| JP5828356B2 (en) | Transport system | |
| JP2014024653A (en) | Conveyance system, and controller | |
| JP2020117858A (en) | Charging control system for mechanical parking device, method and program for the same, and mechanical parking device | |
| JP6167746B2 (en) | Transport vehicle system | |
| CN107458970B (en) | Overhead traveling crane conveying system, conveying vehicle of overhead traveling crane conveying system and control method | |
| KR20220102124A (en) | Article transport system | |
| JP5995387B1 (en) | Wireless power feeding system and wireless power feeding method | |
| CN115115083A (en) | Component transfer plan creation method | |
| CN111295305A (en) | Device for power management, container, associated transport vehicle and system | |
| CN115461691A (en) | Substrate manufacturing system and autonomous traveling vehicle thereof | |
| US20210380020A1 (en) | System for energy management of battery-supplied industrial trucks | |
| JP2021047510A (en) | Unmanned conveyance system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20161129 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20161207 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20161207 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6061319 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |