JP2017174331A - Terminal device - Google Patents
Terminal device Download PDFInfo
- Publication number
- JP2017174331A JP2017174331A JP2016062318A JP2016062318A JP2017174331A JP 2017174331 A JP2017174331 A JP 2017174331A JP 2016062318 A JP2016062318 A JP 2016062318A JP 2016062318 A JP2016062318 A JP 2016062318A JP 2017174331 A JP2017174331 A JP 2017174331A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- unit
- threshold value
- terminal device
- gear
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Abstract
Description
本発明は、通信技術に関し、特に所定の情報が含まれた信号を受信する端末装置に関する。 The present invention relates to communication technology, and more particularly to a terminal device that receives a signal including predetermined information.
車両の障害物との接触を防止するための運転支援として、障害物との接触の可能性がある場合に、接触回避支援装置は警報を発する(例えば、特許文献1参照)。 When there is a possibility of contact with an obstacle as driving assistance for preventing contact with an obstacle of the vehicle, the contact avoidance assistance device issues an alarm (see, for example, Patent Document 1).
車両が前進する場合と比較して車両が後進する場合、運転者にとっては見えにくいので進行方向の確認が困難である。また、後進していた車両が前進する場合には方向転換が発生する。そのため、車両が後進する場合の警告の出力は、車両が前進する場合の警告の出力とは異なったタイミングでなされる方が好ましい。 When the vehicle moves backward as compared with the case where the vehicle moves forward, it is difficult for the driver to see the traveling direction, so it is difficult to confirm the traveling direction. Further, when the vehicle that has been moving backward moves forward, a direction change occurs. For this reason, it is preferable that the warning output when the vehicle moves backward is performed at a timing different from the warning output when the vehicle moves forward.
本発明はこうした状況に鑑みてなされたものであり、その目的は、車両の進行方向を考慮した運転支援を実行する技術を提供することにある。 This invention is made | formed in view of such a condition, The objective is to provide the technique which performs the driving assistance which considered the advancing direction of the vehicle.
上記課題を解決するために、本発明のある態様の端末装置は、車両に搭載可能な端末装置であって、本端末装置が搭載される本車両の第1の位置情報を取得する第1取得部と、他の車両に搭載される他の端末装置から送信された他の車両の第2の位置情報を受信する受信部と、本車両において選択されているギアに関するギア情報を取得する第2取得部と、取得部において取得した第1の位置情報と、受信部において受信した第2の位置情報とをもとに、本車両と他の車両とが遭遇しうる遭遇地点に他の車両が到達する時間を導出する導出部と、導出部において導出した時間がしきい値以下である場合、警告を通知する通知部とを備える。通知部は、第2取得部において取得したギア情報に応じてしきい値を変更する。 In order to solve the above problems, a terminal device according to an aspect of the present invention is a terminal device that can be mounted on a vehicle, and acquires first position information of the vehicle on which the terminal device is mounted. A receiving unit that receives second position information of another vehicle transmitted from another terminal device mounted on the other vehicle, and a second that acquires gear information related to a gear selected in the vehicle. Based on the acquisition unit, the first position information acquired by the acquisition unit, and the second position information received by the reception unit, another vehicle is located at an encounter point where the present vehicle and another vehicle can encounter. A derivation unit that derives the arrival time and a notification unit that notifies a warning when the time derived in the derivation unit is equal to or less than a threshold value are provided. A notification part changes a threshold value according to the gear information acquired in the 2nd acquisition part.
なお、以上の構成要素の任意の組合せ、本発明の表現を方法、装置、システム、記録媒体、コンピュータプログラムなどの間で変換したものもまた、本発明の態様として有効である。 It should be noted that any combination of the above-described constituent elements and a conversion of the expression of the present invention between a method, an apparatus, a system, a recording medium, a computer program, etc. are also effective as an aspect of the present invention.
本発明によれば、車両の進行方向を考慮した運転支援を実行できる。 ADVANTAGE OF THE INVENTION According to this invention, the driving assistance which considered the advancing direction of the vehicle can be performed.
(実施例1)
本発明を具体的に説明する前に、概要を述べる。本発明の実施例1は、車両に搭載された端末装置間において車車間通信を実行するとともに、交差点等に設置された基地局装置から端末装置へ路車間通信も実行する通信システムに関する。このような通信システムは、ITS(Intelligent Transport Systems)とも呼ばれる。通信システムは、IEEE802.11等の規格に準拠した無線LAN(Local Area Network)と同様に、CSMA/CA(Carrier Sense Multiple Access with Collision Avoidance)と呼ばれるアクセス制御機能を使用する。そのため、複数の端末装置によって同一の無線チャネルが共有される。一方、ITSでは、不特定多数の端末装置へ情報を送信する必要がある。そのような送信を効率的に実行するために、本通信システムは、パケット信号をブロードキャスト送信する。
Example 1
Before describing the present invention in detail, an outline will be described. Embodiment 1 of the present invention relates to a communication system that executes vehicle-to-vehicle communication between terminal devices mounted on a vehicle and also executes road-to-vehicle communication from a base station device installed at an intersection or the like to a terminal device. Such a communication system is also called ITS (Intelligent Transport Systems). The communication system uses an access control function called CSMA / CA (Carrier Sense Multiple Access Collision Aviation), as well as a wireless LAN (Local Area Network) compliant with a standard such as IEEE 802.11. Therefore, the same radio channel is shared by a plurality of terminal devices. On the other hand, in ITS, it is necessary to transmit information to an unspecified number of terminal devices. In order to efficiently perform such transmission, the communication system broadcasts a packet signal.
つまり、車車間通信として、端末装置は、車両の位置・速度・進行方向等の情報を格納したパケット信号をブロードキャスト送信する。また、他の端末装置は、パケット信号を受信するとともに、前述の情報をもとに車両の接近等を認識する。ここで、路車間通信と車車間通信との干渉を低減するために、基地局装置は、複数のサブフレームが含まれたフレームを繰り返し規定する。基地局装置は、路車間通信のために、複数のサブフレームのいずれかを選択し、選択したサブフレームの先頭部分の期間において、制御情報等が格納されたパケット信号をブロードキャスト送信する。 That is, as inter-vehicle communication, the terminal device broadcasts a packet signal that stores information such as the position, speed, and traveling direction of the vehicle. In addition, the other terminal device receives the packet signal and recognizes the approach of the vehicle based on the above-described information. Here, in order to reduce interference between road-vehicle communication and vehicle-to-vehicle communication, the base station apparatus repeatedly defines a frame including a plurality of subframes. The base station apparatus selects any of a plurality of subframes for road-to-vehicle communication, and broadcasts a packet signal in which control information and the like are stored during the period of the head portion of the selected subframe.
制御情報には、当該基地局装置がパケット信号をブロードキャスト送信するための期間(以下、「路車送信期間」という)に関する情報が含まれている。端末装置は、制御情報をもとに路車送信期間を特定し、路車送信期間以外の期間(以下、「車車送信期間」という)においてCSMA方式にてパケット信号をブロードキャスト送信する。その結果、路車間通信と車車間通信とが時分割多重される。なお、基地局装置からの制御情報を受信できない端末装置、つまり基地局装置によって形成されたエリアの外に存在する端末装置は、フレームの構成に関係なくCSMA方式にてパケット信号をブロードキャスト送信する。 The control information includes information related to a period for the base station apparatus to broadcast the packet signal (hereinafter referred to as “road vehicle transmission period”). The terminal device specifies a road and vehicle transmission period based on the control information, and broadcasts a packet signal by the CSMA method in a period other than the road and vehicle transmission period (hereinafter referred to as “vehicle transmission period”). As a result, road-to-vehicle communication and vehicle-to-vehicle communication are time-division multiplexed. Note that a terminal device that cannot receive control information from the base station device, that is, a terminal device that exists outside the area formed by the base station device broadcasts a packet signal using the CSMA method regardless of the frame configuration.
このような状況下において、本実施例に係る端末装置は、他の端末装置あるいは基地局装置から受信したパケット信号に含まれた情報をもとに、支援発生条件を満足した場合に運転支援を決定する。ここで、パケット信号に含まれた情報の一例は、他の端末装置が搭載された車両の位置情報等である。また、運転支援とは、運転者に対して運転を支援することであり、その一例は出会い頭衝突防止支援である。出会い頭衝突防止支援は、車両が直進するとき、他の車両が交差するように接近している場合に接近車両の存在を運転者に通知する。なお、運転支援は複数種類規定されているが、ここでは説明を明瞭にするために、出会い頭衝突防止支援を説明の対象にする。 Under such circumstances, the terminal device according to the present embodiment provides driving support when the support generation condition is satisfied based on the information included in the packet signal received from another terminal device or the base station device. decide. Here, an example of information included in the packet signal is position information of a vehicle on which another terminal device is mounted. The driving support is to support the driver for driving, and an example thereof is support for preventing collision at encounter. The encounter collision prevention support notifies the driver of the presence of an approaching vehicle when another vehicle is approaching so as to intersect when the vehicle goes straight. Although a plurality of types of driving support are defined, here, for the sake of clarity, the encounter collision prevention support is the target of the description.
出会い頭衝突防止支援では、直進しようとする車両と、交差する方向から接近する他の車両が、遭遇しうるポイント(以下、「遭遇地点」という)に、当該他の車両が到達する時間が計算される。その時間がしきい値以下である場合に、本車両では出会い頭衝突防止支援の実行が決定される。ここで、しきい値は、本車両が前進している場合を想定して設定される。しかしながら、前述のごとく、本車両が後進している場合、運転者にとっては進行方向の確認が困難であるとともに、方向転換が発生することもある。そのため、本車両が前進している場合と比較して、本車両が後進している場合には、出会い頭衝突防止支援が早くに実行される方が好ましい。 In the encounter collision prevention support, the time required for the other vehicle to reach a point where the vehicle going straight and another vehicle approaching from the intersecting direction can encounter (hereinafter referred to as “the encounter point”) is calculated. The When the time is equal to or less than the threshold value, the vehicle is determined to perform the encounter collision prevention support. Here, the threshold value is set on the assumption that the vehicle is moving forward. However, as described above, when the vehicle is moving backward, it is difficult for the driver to confirm the traveling direction, and a direction change may occur. Therefore, when the vehicle is moving backward as compared with the case where the vehicle is moving forward, it is preferable that the encounter collision prevention support is executed earlier.
これに対応するために、本実施例において、車両が後進する場合には、前進する場合とは異なるタイミングで運転支援を実行する。例えば、駐車場から公道に後進して出る場合、公道に出てから方向転換して前進するまでを想定して、早めに運転支援を実行する。具体的には、車両が前進しているか、後進しているかに応じてしきい値が変更される。つまり、前進の場合のしきい値よりも後進の場合のしきい値の方が大きい値に設定される。 In order to cope with this, in the present embodiment, when the vehicle moves backward, driving assistance is executed at a timing different from that when moving forward. For example, when going backward from a parking lot to a public road, driving assistance is executed early on the assumption that it goes from the public road until it changes direction and moves forward. Specifically, the threshold value is changed depending on whether the vehicle is moving forward or backward. In other words, the threshold value for the backward travel is set to a larger value than the threshold value for the forward travel.
図1は、本発明の実施例1に係る通信システム100の構成を示す。これは、1つの交差点を上方から見た場合に相当する。通信システム100は、基地局装置10、車両12と総称される第1車両12a、第2車両12b、第3車両12c、第4車両12d、第5車両12e、第6車両12f、第7車両12g、第8車両12h、ネットワーク200を含む。ここでは、第1車両12aのみに示しているが、各車両12には、端末装置14が搭載される。また、エリア202が、基地局装置10の周囲に形成され、エリア外204が、エリア202の外側に形成されている。
FIG. 1 shows a configuration of a
図示のごとく、図面の水平方向、つまり左右の方向に向かう道路と、図面の垂直方向、つまり上下の方向に向かう道路とが中心部分で交差している。ここで、図面の上側が方角の「北」に相当し、左側が方角の「西」に相当し、下側が方角の「南」に相当し、右側が方角の「東」に相当する。また、2つの道路の交差部分が「交差点」である。第1車両12a、第2車両12bが、左から右へ向かって進んでおり、第3車両12c、第4車両12dが、右から左へ向かって進んでいる。また、第5車両12e、第6車両12fが、上から下へ向かって進んでおり、第7車両12g、第8車両12hが、下から上へ向かって進んでいる。また、車両12の一例は自動車である。
As shown in the drawing, the road that goes in the horizontal direction of the drawing, that is, the left and right direction, intersects the vertical direction of the drawing, that is, the road that goes in the up and down direction, at the central portion. Here, the upper side of the drawing corresponds to the direction “north”, the left side corresponds to the direction “west”, the lower side corresponds to the direction “south”, and the right side corresponds to the direction “east”. An intersection of two roads is an “intersection”. The
通信システム100において、基地局装置10は、交差点に固定して設置される。基地局装置10は、端末装置間の通信を制御する。基地局装置10は、図示しないGPS(Global Positioning System)衛星から受信した信号、あるいは図示しない他の基地局装置10にて形成されたフレームをもとに、複数のサブフレームが含まれたフレームを繰り返し生成する。例えば、GPS衛星から受信した信号において示された「1sec」の期間を10分割することによって、「100msec」のフレームが10個生成される。ここで、各サブフレームの先頭部分に路車送信期間が設定可能であるような規定がなされている。
In the
基地局装置10は、フレーム中の複数のサブフレームのうち、他の基地局装置10によって路車送信期間が設定されていないサブフレームを選択する。基地局装置10は、選択したサブフレームの先頭部分に路車送信期間を設定する。基地局装置10は、設定した路車送信期間においてパケット信号をブロードキャスト送信する。路車送信期間において、複数のパケット信号がブロードキャスト送信されることもある。パケット信号は、制御情報、ペイロードによって構成されている。制御情報には、路車送信期間を設定したサブフレーム番号等が含まれる。また、ペイロードには、例えば、事故情報、渋滞情報、信号情報等が含まれる。これらのデータは、ネットワーク200から取得される。
The
端末装置14は、前述のごとく、車両12に搭載され移動可能である。端末装置14は、基地局装置10からのパケット信号を受信すると、エリア202に存在すると推定する。端末装置14は、エリア202に存在する場合、パケット信号に含まれた制御情報、特に路車送信期間が設定されたタイミングに関する情報およびフレームに関する情報をもとに、フレームを生成する。その結果、複数の端末装置14のそれぞれにおいて生成されるフレームは、基地局装置10において生成されるフレームに同期する。端末装置14は、路車送信期間とは異なった期間である車車送信期間においてパケット信号をブロードキャスト送信する。ここで、車車送信期間においてCSMA/CAが実行される。一方、端末装置14は、エリア外204に存在していると推定した場合、フレームの構成に関係なく、CSMA/CAを実行することによって、パケット信号をブロードキャスト送信する。端末装置14は、他の端末装置14からのパケット信号をもとに、他の端末装置14が搭載された他の車両12の接近等を認識する。
As described above, the
図2(a)−(d)は、通信システム100において規定されるフレームのフォーマットを示す。図2(a)は、フレームの構成を示す。フレームは、第1サブフレームから第Nサブフレームと示されるN個のサブフレームによって形成されている。これは、端末装置14がブロードキャスト送信に使用可能なサブフレームを複数時間多重することによってフレームが形成されているといえる。例えば、フレームの長さが100msecであり、Nが8である場合、12.5msecの長さのサブフレームが規定される。Nは、8以外であってもよい。
2A to 2D show frame formats defined in the
図2(b)は、図示しない第1基地局装置10aによって生成されるフレームの構成を示す。第1基地局装置10aは、基地局装置10のうちの1つである。第1基地局装置10aは、第1サブフレームの先頭部分に路車送信期間を設定する。路車送信期間とは、基地局装置10がパケット信号をブロードキャスト送信可能な機関である。また、第1基地局装置10aは、第1サブフレームにおいて路車送信期間に続いて車車送信期間を設定する。車車送信期間とは、端末装置14がパケット信号をブロードキャスト送信可能な期間である。つまり、第1基地局装置10aは、第1サブフレームの先頭期間である路車送信期間においてパケット信号をブロードキャスト送信可能であり、かつフレームのうち、路車送信期間以外の車車送信期間において端末装置14がパケット信号をブロードキャスト送信可能であるような規定がなされる。さらに、第1基地局装置10aは、第2サブフレームから第Nサブフレームに車車送信期間のみを設定する。
FIG. 2B shows a configuration of a frame generated by the first base station apparatus 10a (not shown). The first base station device 10 a is one of the
図2(c)は、図示しない第2基地局装置10bによって生成されるフレームの構成を示す。第2基地局装置10bは、第2サブフレームの先頭部分に路車送信期間を設定する。また、第2基地局装置10bは、第2サブフレームにおける路車送信期間の後段、第1サブフレーム、第3サブフレームから第Nサブフレームに車車送信期間を設定する。図2(d)は、図示しない第3基地局装置10cによって生成されるフレームの構成を示す。第3基地局装置10cは、第3サブフレームの先頭部分に路車送信期間を設定する。また、第3基地局装置10cは、第3サブフレームにおける路車送信期間の後段、第1サブフレーム、第2サブフレーム、第4サブフレームから第Nサブフレームに車車送信期間を設定する。このように、複数の基地局装置10は、互いに異なったサブフレームを選択し、選択したサブフレームの先頭部分に路車送信期間を設定する。
FIG. 2C shows a configuration of a frame generated by the second base station apparatus 10b (not shown). The second base station apparatus 10b sets a road and vehicle transmission period at the beginning of the second subframe. Also, the second base station apparatus 10b sets the vehicle transmission period from the first stage of the road and vehicle transmission period in the second subframe, from the first subframe and the third subframe to the Nth subframe. FIG. 2D shows a configuration of a frame generated by a third base station apparatus 10c (not shown). The third base station apparatus 10c sets a road and vehicle transmission period at the beginning of the third subframe. In addition, the third base station apparatus 10c sets the vehicle transmission period from the first stage of the road and vehicle transmission period in the third subframe, the first subframe, the second subframe, and the fourth subframe to the Nth subframe. As described above, the plurality of
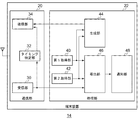
図3は、端末装置14の構成を示す。端末装置14は、通信部20、処理部22を含む。通信部20は、受信部30、タイミング特定部32、送信部34を含む。処理部22は、第1取得部40、第2取得部42、生成部44、導出部46、通知部48を含む。前述のごとく、端末装置14は、車両12に搭載可能である。
FIG. 3 shows the configuration of the
受信部30は、アンテナを介して、図示しない他の端末装置14あるいは基地局装置10からのパケット信号を受信する。受信部30は、受信した無線周波数のパケット信号に対して周波数変換を実行し、ベースバンドのパケット信号を生成する。また、受信部30は、ベースバンドのパケット信号に対して、復調を実行する。ここで、通信システム100は、OFDM(Orthogonal Frequency Division Multiplexing)変調方式に対応するので、受信部30は、FFT(Fast Fourier Transform)も実行する。さらに、受信部30は、復調した結果を処理部22、タイミング特定部32に出力する。
The receiving
タイミング特定部32は、受信部30からの復調結果が、図示しない基地局装置10からのパケット信号である場合に、路車送信期間が配置されたサブフレームのタイミングを特定する。その際、タイミング特定部32は、図1のエリア202内に存在すると推定する。タイミング特定部32は、基地局装置10からのパケット信号に含まれた情報をもとに、基地局装置10において形成されたフレームに同期したフレームを生成する。一方、タイミング特定部32は、基地局装置10からのパケット信号を入力していない場合、図1のエリア外204に存在すると推定する。
When the demodulation result from the receiving
タイミング特定部32は、エリア202に存在していることを推定した場合、車車送信期間を選択する。また、タイミング特定部32は、車車送信期間内でCSMA/CAを開始することによって送信タイミングを決定する。タイミング特定部32は、フレームの構成を考慮せずに、CSMA/CAを実行することによって、送信タイミングを決定する。タイミング特定部32は、決定した送信タイミングを送信部34に通知する。
When it is estimated that the
送信部34は、処理部22からのデータに対して、変調を実行する。前述のごとく、通信システム100は、OFDM変調方式に対応するので、送信部34は、IFFT(Inverse Fast Fourier Transform)も実行する。また、送信部34は、その結果であるベースバンドのパケット信号に対して周波数変換を実行し、無線周波数のパケット信号を生成する。さらに、送信部34は、タイミング特定部32から通知された送信タイミングにおいて、無線周波数のパケット信号をアンテナからブロードキャスト送信する。
The
第1取得部40は、図示しないGPS受信機、ジャイロスコープ、車速センサ等を含む。第1取得部40は、それらから供給されるデータによって、本端末装置14が搭載される車両12の存在位置、進行方向、移動速度等(以下、「第1の位置情報」と総称する)を取得する。なお、存在位置は、緯度・経度によって示される。進行方向は、方位角によって示され、北を基準方位(0度)として時計回りを正の角度としている。これらの取得には公知の技術が使用されればよいので、ここでは説明を省略する。第1取得部40は、第1の位置情報を生成部44、導出部46へ出力する。
The
受信部30からは、前述のごとく、復調した結果が出力される。復調した結果には、他の車両12に搭載される他の端末装置14から送信された他の車両12の存在位置、進行方向、移動速度等(以下、「第2の位置情報」と総称する)が含まれる。第2の位置情報は、導出部46に入力される。第2取得部42は、CAN(Controller Area Network)を介してECU(Electronic Control Unit)から、本車両12において選択されているギアに関するギア情報を取得する。ギア情報は、前進あるいは後進を示す。第2取得部42は、第1取得部40と同様に、ギア情報を生成部44、導出部46に出力する。
As described above, the demodulated result is output from the receiving
導出部46は、第1取得部40からの第1の位置情報、第2取得部42からのギア情報、受信部30からの第2の位置情報を入力する。導出部46は、第1の位置情報から本車両12がこれから進む経路を推定するとともに、第2の位置情報から他の車両12がこれから進む経路を推定する。また、導出部46は、これらの経路を地図データに対応付けることによって、本車両12と他の車両12とが遭遇しうる地点(以下、「遭遇地点」という)を特定する。
The
導出部46は、第1の位置情報における存在位置と遭遇地点との距離を、第1の位置情報における移動速度で除算することによって、本車両12が遭遇地点に到達する時間を導出する。また、導出部46は、第2の位置情報における存在位置と遭遇地点との距離を、第2の位置情報における移動速度で除算することによって、他の車両12が遭遇地点に到達する時間を導出する。さらに、導出部46は、本車両12が遭遇地点に到達する時間と、他の車両12が遭遇地点に到達する時間との差を導出し、導出した時間差が所定の時間差、例えば3秒以内であれば、本車両12と他の車両12とが遭遇すると判定する。遭遇すると判定した場合、導出部46は、他の車両12が遭遇地点に到達する時間、本車両12のギア情報を通知部48に出力する。
The deriving
通知部48は、導出部46から、他の車両12が遭遇地点に到達する時間、本車両12のギア情報を入力する。通知部48は、ギア情報に応じてしきい値を設定する。例えば、ギア情報が前進のギアを示している場合、導出部46は、しきい値を「A」に設定する。一方、ギア情報が後進のギアを示している場合、導出部46は、しきい値を「A+B」に設定する。つまり、通知部48は、ギア情報が前進のギアを示している場合よりも、ギア情報が後進のギアを示している場合の方においてしきい値を大きくする。
The
他の車両12が遭遇地点に到達する時間がしきい値以下である場合、通知部48は、運転支援ありを決定する。一方、他の車両12が遭遇地点に到達する時間がしきい値より大きい場合、通知部48は、運転支援なしを決定する。運転支援ありを決定した場合、通知部48は、警告を通知する。警告は、画面と音声との少なくとも一方によって通知される。前進の場合よりも後進の場合の方がしきい値が大きいので、前進の場合よりも後進の場合の方において、警告が早いタイミングで通知される。
When the time for the other vehicle 12 to reach the encounter point is equal to or less than the threshold value, the
生成部44は、第1取得部40からの第1の位置情報と、第2取得部42からのギア情報を入力する。生成部44は、これらを含めながらパケット信号を生成する。生成部44は、パケット信号を送信部34に出力する。
The
この構成は、ハードウエア的には、任意のコンピュータのCPU、メモリ、その他のLSIで実現でき、ソフトウエア的にはメモリにロードされたプログラムなどによって実現されるが、ここではそれらの連携によって実現される機能ブロックを描いている。したがって、これらの機能ブロックがハードウエアのみ、ハードウエアとソフトウエアの組合せによっていろいろな形で実現できることは、当業者には理解されるところである。 This configuration can be realized in terms of hardware by a CPU, memory, or other LSI of any computer, and in terms of software, it can be realized by a program loaded in the memory, but here it is realized by their cooperation. Draw functional blocks. Accordingly, those skilled in the art will understand that these functional blocks can be realized in various forms only by hardware, or by a combination of hardware and software.
図4(a)−(c)は、通信システム100による処理の概要を示す。図4(a)は、通信システム100による処理の前提となる第1車両12aの動作を示す。第1車両12aは、公道(道路)に面した駐車場に対して、前進して駐車した状態であり、駐車場側の公道に出ようとしている。初期状態において、第1車両12aは駐車場に位置する(ポイントP1)。この状態から、第1車両12aは後進しながら公道に進入してから方向転換することによって、ポイントP2を通ってポイントP3に移動する。さらに、第1車両12aは前進することによって、ポイントP2に移動する。ここでは、第1車両12aがポイントP2を通ってポイントP3に達し、再びポイントP2まで移動するまでに時間「B」を要すると想定する。なお、ポイントP2は、後述するポイントP4に対応する位置としている。
4A to 4C show an outline of processing by the
図4(b)は、第1車両12aが駐車場から前進しながら公道に進入する場合を示す。一方、公道には第2車両12bが走行している。また、第1車両12aと第2車両12bとの遭遇点がポイントP4と示される。第2車両12bがポイントP4に到達するまでの時間がしきい値「A」以下になれば、第1車両12aにおいて運転支援が実行される。
FIG. 4B shows a case where the
図4(c)は、図4(a)と同様に、第1車両12aが駐車場から後進しながら公道に進入する場合を示す。この場合、公道に出てから方向転換して前進に切りかえてその場を立ち去るまでの時間は、前述のごとく「B」とされるので、第1車両12aが公道に留まる時間を考慮し、第1車両12aにおいて早いタイミングで運転支援が発生されるべきである。具体的には、第2車両12bがポイントP4に到達するまでの時間がしきい値「A+B」以下になれば、第1車両12aにおいて運転支援が実行される。つまり、図4(b)の場合と比較して、しきい値が大きくされる。
FIG. 4C shows a case where the
以上の構成による通信システム100の動作を説明する。図5は、端末装置14による通知手順を示すフローチャートである。本車両12が前進している場合(S10のY)、通知部48はしきい値を「A」に設定し(S12)、本車両12が前進していない場合(S10のN)、通知部48はしきい値を「A+B」に設定する(S14)。導出部46において遭遇すると判定された場合(S16のY)、時間がしきい値以下であれば(S18のY)、通知部48は警告を通知する(S20)。導出部46において遭遇すると判定されない場合(S16のN)、あるいは時間がしきい値以下でない場合(S18のN)、処理は終了される。
The operation of the
本発明の実施例によれば、車両のギア情報に応じてしきい値を変更するので、車両の進行方向に応じて警告の通知タイミングを変更できる。また、車両の進行方向に応じて警告の通知タイミングが変更されるので、車両の進行方向を考慮した運転支援を実行できる。また、前進の場合よりも後進の場合の方においてしきい値を大きくするので、前進の場合よりも後進の場合の方において警告の通知タイミングを早くできる。また、前進の場合よりも後進の場合の方において警告の通知タイミングが早くなるので、運転支援の安全性を高くできる。 According to the embodiment of the present invention, since the threshold value is changed according to the vehicle gear information, the warning notification timing can be changed according to the traveling direction of the vehicle. In addition, since the warning notification timing is changed according to the traveling direction of the vehicle, it is possible to perform driving support in consideration of the traveling direction of the vehicle. In addition, since the threshold value is increased in the case of backward travel than in the case of forward travel, the warning notification timing can be made earlier in the backward travel direction than in the forward travel. In addition, since the warning notification timing is earlier in the case of backward travel than in the case of forward travel, the safety of driving support can be increased.
(実施例2)
次に、実施例2を説明する。実施例2は、実施例1と同様に、車両に搭載された端末装置間において車車間通信を実行するとともに、交差点等に設置された基地局装置から端末装置へ路車間通信も実行する通信システムに関する。また、出会い頭衝突防止支援を説明の対象にする。一方、実施例1では、警告が1段階とされているが、実施例2では、警告が2段階である場合を想定する。実施例2に係る通信システム100、端末装置14は、図1、図3と同様のタイプである。ここでは、実施例1との差異を中心に説明する。
(Example 2)
Next, Example 2 will be described. In the second embodiment, as in the first embodiment, a communication system that performs inter-vehicle communication between terminal devices mounted on a vehicle and also performs road-to-vehicle communication from a base station device installed at an intersection or the like to a terminal device About. In addition, support for encounter collision prevention will be covered. On the other hand, in the first embodiment, the warning is in one stage, but in the second embodiment, it is assumed that the warning has two stages. The
通知部48は、しきい値として、第1のしきい値と第2のしきい値を規定する。ここで、第2のしきい値は第1のしきい値よりも大きい。通知部48は、車両のギア情報に応じて第1のしきい値および第2のしきい値を設定する。例えば、ギア情報が前進のギアを示している場合、導出部46は、第1のしきい値を「A」に設定し、第2のしきい値を「A+B」に設定する。一方、ギア情報が後進のギアを示している場合、導出部46は、第1のしきい値を「A+B」に設定し、第2のしきい値を「A+B+C」に設定する。なお、「A」と「B」は実施例1と異なった値でもよい。このように、通知部48は、ギア情報が前進のギアを示している場合よりも、ギア情報が後進のギアを示している場合の方において第1のしきい値および第2のしきい値を大きくする。
The
他の車両12が遭遇地点に到達する時間が第1のしきい値以下である場合、通知部48は、警告として運転者に「注意喚起」を通知する。また、他の車両12が遭遇地点に到達する時間が第1のしきい値よりも大きく、かつ第2のしきい値以下である場合、通知部48は、警告として運転者に「情報提供」を通知する。さらに、他の車両12が遭遇地点に到達する時間が第2のしきい値よりも大きい場合、通知部48は運転支援なしを決定する。
When the time for the other vehicle 12 to reach the encounter point is equal to or less than the first threshold value, the
ここで、「注意喚起」と「情報提供」は、運転者への通知という点では共通するが、通知の緊急性のレベルが異なる。「注意喚起」の方が「情報提供」よりも緊急性のレベルが高い。そのため、例えば、「情報提供」が画面と音声のうちの一方による通知である場合、「注意喚起」は画面と音声の両方による通知である。また、「注意喚起」における通知内容が、「情報提供」における通知内容よりも緊急性を促すようなものであってもよい。 Here, “notice” and “information provision” are common in terms of notifying the driver, but the level of urgency of the notification is different. “Warning” has a higher level of urgency than “information provision”. Therefore, for example, when “information provision” is notification by one of the screen and sound, “attention” is notification by both screen and sound. Further, the notification content in “calling attention” may be more urgent than the notification content in “providing information”.
図6(a)−(d)は、本発明の実施例2に係る通信システム100による別の処理の概要を示す。図6(a)は、図4(b)と同様に、第1車両12aが駐車場から前進しながら公道に進入する場合を示す。第2車両12bがポイントP4に到達するまでの時間がしきい値「A+B」以下になれば、第1車両12aにおいて情報提供による運転支援が実行される。図6(b)は、図6(a)に続く状態を示す。第2車両12bがポイントP4に到達するまでの時間がしきい値「A」以下になれば、第1車両12aにおいて注意喚起による運転支援が実行される。
FIGS. 6A to 6D show an outline of another process performed by the
図6(c)は、図4(c)と同様に、第1車両12aが駐車場から後進しながら公道に進入する場合を示す。第2車両12bがポイントP4に到達するまでの時間がしきい値「A+B」以下になれば、第1車両12aにおいて注意喚起による運転支援が実行される。つまり、図6(a)では情報提供であったが、図6(c)では注意喚起がなされるので、後進の場合、前進の場合よりも危険度の高いレベルの運転支援が実行される。図6(d)は、図6(c)に続く状態を示す。第2車両12bがポイントP4に到達するまでの時間がしきい値「A」以下になっても、第1車両12aにおいて注意喚起による運転支援が継続して実行される。
FIG. 6C shows a case where the
本発明の実施例によれば、車両が前進の場合よりも後進の場合の方において第1のしきい値および第2のしきい値を大きくするので、前進の場合に情報提供を通知する場合でも、後進の場合に注意喚起を通知できる。また、情報提供の代わりに注意喚起を通知するので、運転支援の安全性を高くできる。 According to the embodiment of the present invention, the first threshold value and the second threshold value are increased in the case where the vehicle is traveling backward than in the case where the vehicle is traveling forward. But you can be alerted in case you go backwards. In addition, since alerting is notified instead of providing information, the safety of driving support can be increased.
本発明の一態様の概要は、次の通りである。本発明のある態様の端末装置は、車両に搭載可能な端末装置であって、本端末装置が搭載される本車両の第1の位置情報を取得する第1取得部と、他の車両に搭載される他の端末装置から送信された他の車両の第2の位置情報を受信する受信部と、本車両において選択されているギアに関するギア情報を取得する第2取得部と、取得部において取得した第1の位置情報と、受信部において受信した第2の位置情報とをもとに、本車両と他の車両とが遭遇しうる遭遇地点に他の車両が到達する時間を導出する導出部と、導出部において導出した時間がしきい値以下である場合、警告を通知する通知部とを備える。通知部は、第2取得部において取得したギア情報に応じてしきい値を変更する。 The outline of one embodiment of the present invention is as follows. A terminal device according to an aspect of the present invention is a terminal device that can be mounted on a vehicle, and is mounted on another vehicle and a first acquisition unit that acquires first position information of the vehicle on which the terminal device is mounted. Received by the receiving unit that receives the second position information of the other vehicle transmitted from the other terminal device, the second acquiring unit that acquires the gear information related to the gear selected in the vehicle, and acquired by the acquiring unit A derivation unit for deriving a time for the other vehicle to reach an encounter point where the present vehicle and the other vehicle can encounter based on the first position information and the second position information received by the receiving unit. And a notifying unit for notifying a warning when the time derived by the deriving unit is equal to or less than the threshold value. A notification part changes a threshold value according to the gear information acquired in the 2nd acquisition part.
この態様によると、車両のギア情報に応じてしきい値を変更するので、車両の進行方向を考慮した運転支援を実行できる。 According to this aspect, since the threshold value is changed according to the gear information of the vehicle, it is possible to execute driving support in consideration of the traveling direction of the vehicle.
通知部は、第2取得部において取得したギア情報が前進のギアを示している場合よりも、第2取得部において取得したギア情報が後進のギアを示している場合の方においてしきい値を大きくしてもよい。この場合、前進の場合よりも後進の場合の方においてしきい値を大きくするので、前進の場合よりも後進の場合の方において警告の通知タイミングを早くできる。 The notification unit sets the threshold value in the case where the gear information acquired in the second acquisition unit indicates a reverse gear than in the case where the gear information acquired in the second acquisition unit indicates a forward gear. You may enlarge it. In this case, since the threshold value is set larger in the case of the backward movement than in the case of the forward movement, the warning notification timing can be made earlier in the case of the backward movement than in the case of the forward movement.
以上、本発明を実施例をもとに説明した。この実施例は例示であり、それらの各構成要素あるいは各処理プロセスの組合せにいろいろな変形例が可能なこと、またそうした変形例も本発明の範囲にあることは当業者に理解されるところである。 In the above, this invention was demonstrated based on the Example. This embodiment is an exemplification, and it will be understood by those skilled in the art that various modifications can be made to each of those constituent elements or combinations of processing processes, and such modifications are also within the scope of the present invention. .
実施例1、2において、車両12は、駐車している駐車場と同じ側の公道に出ていく例を示したが、これに限らず、車両12が駐車場と反対側の公道に出ていく場合に適用してもよい。 In the first and second embodiments, the example in which the vehicle 12 goes out to the public road on the same side as the parking lot where the vehicle is parked is not limited to this. You may apply to
10 基地局装置、 12 車両、 14 端末装置、 20 通信部、 22 処理部、 30 受信部、 32 タイミング特定部、 34 送信部、 40 第1取得部、 42 第2取得部、 44 生成部、 46 導出部、 48 通知部、 100 通信システム。 10 base station devices, 12 vehicles, 14 terminal devices, 20 communication units, 22 processing units, 30 receiving units, 32 timing specifying units, 34 transmitting units, 40 first acquiring units, 42 second acquiring units, 44 generating units, 46 Deriving unit, 48 notifying unit, 100 communication system.
Claims (2)
本端末装置が搭載される本車両の第1の位置情報を取得する第1取得部と、
他の車両に搭載される他の端末装置から送信された当該他の車両の第2の位置情報を受信する受信部と、
前記本車両において選択されているギアに関するギア情報を取得する第2取得部と、
前記取得部において取得した第1の位置情報と、前記受信部において受信した第2の位置情報とをもとに、前記本車両と前記他の車両とが遭遇しうる遭遇地点に前記他の車両が到達する時間を導出する導出部と、
前記導出部において導出した時間がしきい値以下である場合、警告を通知する通知部とを備え、
前記通知部は、前記第2取得部において取得したギア情報に応じてしきい値を変更することを特徴とする端末装置。 A terminal device that can be mounted on a vehicle,
A first acquisition unit that acquires first position information of the vehicle on which the terminal device is mounted;
A receiving unit that receives the second position information of the other vehicle transmitted from another terminal device mounted on the other vehicle;
A second acquisition unit that acquires gear information related to a gear selected in the vehicle;
Based on the first position information acquired by the acquisition unit and the second position information received by the reception unit, the other vehicle is located at an encounter point where the vehicle and the other vehicle can encounter. A derivation unit for deriving the time at which
When the time derived in the deriving unit is equal to or less than a threshold value, a notification unit that notifies a warning,
The said notification part changes a threshold value according to the gear information acquired in the said 2nd acquisition part, The terminal device characterized by the above-mentioned.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016062318A JP2017174331A (en) | 2016-03-25 | 2016-03-25 | Terminal device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016062318A JP2017174331A (en) | 2016-03-25 | 2016-03-25 | Terminal device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017174331A true JP2017174331A (en) | 2017-09-28 |
Family
ID=59972580
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016062318A Pending JP2017174331A (en) | 2016-03-25 | 2016-03-25 | Terminal device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017174331A (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019214292A (en) * | 2018-06-13 | 2019-12-19 | クラリオン株式会社 | Parking support device and parking support method |
-
2016
- 2016-03-25 JP JP2016062318A patent/JP2017174331A/en active Pending
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019214292A (en) * | 2018-06-13 | 2019-12-19 | クラリオン株式会社 | Parking support device and parking support method |
| JP7163077B2 (en) | 2018-06-13 | 2022-10-31 | フォルシアクラリオン・エレクトロニクス株式会社 | PARKING ASSIST DEVICE AND PARKING ASSIST METHOD |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5880904B1 (en) | Terminal device | |
| US10679498B2 (en) | Wireless communication device | |
| JP7429864B2 (en) | Equipment, vehicles, control methods, programs | |
| JP6213779B2 (en) | Wireless device | |
| JP5820964B2 (en) | Wireless device | |
| JP6241751B2 (en) | Terminal device | |
| JP2016100028A (en) | Terminal device | |
| JP5799238B1 (en) | Wireless device, processing device, and processing system | |
| JP2017174332A (en) | Terminal device | |
| JP2011070652A (en) | Terminal device | |
| JP2015045949A (en) | Terminal equipment and in-vehicle radio equipment | |
| JP6485710B2 (en) | Vehicle and wireless device | |
| JP2017174331A (en) | Terminal device | |
| JP6277531B2 (en) | Wireless device | |
| JP6688999B2 (en) | Vehicles and wireless devices | |
| JP5935176B2 (en) | Wireless device | |
| JP2015207794A (en) | Terminal device | |
| JP6245540B2 (en) | Terminal device | |
| JP6452050B2 (en) | Terminal device | |
| JP2017183987A (en) | Terminal device | |
| JP2017174330A (en) | Terminal device and base station device | |
| WO2015029315A1 (en) | Terminal device, control method, and program | |
| JP2017184225A (en) | Terminal device |