JP2017093281A - 電子装置及び回路 - Google Patents
電子装置及び回路 Download PDFInfo
- Publication number
- JP2017093281A JP2017093281A JP2016199770A JP2016199770A JP2017093281A JP 2017093281 A JP2017093281 A JP 2017093281A JP 2016199770 A JP2016199770 A JP 2016199770A JP 2016199770 A JP2016199770 A JP 2016199770A JP 2017093281 A JP2017093281 A JP 2017093281A
- Authority
- JP
- Japan
- Prior art keywords
- voltage
- operating component
- starting
- output terminal
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Abandoned
Links
- 239000004065 semiconductor Substances 0.000 claims description 87
- 230000015556 catabolic process Effects 0.000 claims description 5
- 230000001105 regulatory effect Effects 0.000 claims description 2
- 230000001360 synchronised effect Effects 0.000 abstract description 4
- 238000010586 diagram Methods 0.000 description 7
- 230000005355 Hall effect Effects 0.000 description 2
- 238000004804 winding Methods 0.000 description 2
- 230000003111 delayed effect Effects 0.000 description 1
Images

Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P1/00—Arrangements for starting electric motors or dynamo-electric converters
- H02P1/02—Details of starting control
- H02P1/022—Security devices, e.g. correct phase sequencing
- H02P1/026—Means for delayed starting
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P1/00—Arrangements for starting electric motors or dynamo-electric converters
- H02P1/16—Arrangements for starting electric motors or dynamo-electric converters for starting dynamo-electric motors or dynamo-electric converters
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/30—Structural association with control circuits or drive circuits
- H02K11/33—Drive circuits, e.g. power electronics
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/26—Arrangements for controlling single phase motors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0403—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by constructional features, e.g. common housing for motor and gear box
- B62D5/0406—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by constructional features, e.g. common housing for motor and gear box including housing for electronic control unit
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
- H02P27/06—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/20—Arrangements for starting
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Computer Security & Cryptography (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
- Motor And Converter Starters (AREA)
- Dc-Dc Converters (AREA)
- Control Of Multiple Motors (AREA)
Abstract
【課題】関連付けられた動作構成要素の始動時間を同期させるように構成された電子装置及び回路を提供する。
【解決手段】回路は、第1の動作構成要素、第2の動作構成要素及び始動時間制御回路を含む。第1の動作構成要素の始動電圧は、第2の動作構成要素の始動電圧より低く、始動時間制御回路は、第1の動作構成要素の始動時間が第2の動作構成要素の始動時間と同期するよう調節するように構成される。
【選択図】図2
【解決手段】回路は、第1の動作構成要素、第2の動作構成要素及び始動時間制御回路を含む。第1の動作構成要素の始動電圧は、第2の動作構成要素の始動電圧より低く、始動時間制御回路は、第1の動作構成要素の始動時間が第2の動作構成要素の始動時間と同期するよう調節するように構成される。
【選択図】図2
Description
本発明は、電子装置及び回路に関する。
現在、ヘアドライヤ、真空掃除機、及び動力工具などの電子装置は、一般に多数の動作構成要素を有する。一般に動作構成要素の始動電圧は同一ではなく、これは、システムが電源投入された後で動作構成要素が逐次的に始動する原因となる。場合によっては、関連付けられた動作構成要素の始動時間が同じでないことが、種々の問題を引き起こす傾向がある。
本開示の実施形態により、電子装置調節装置が提供され、これはモータとモータ駆動回路とを含む。モータ駆動回路は、第1の動作構成要素及び第2の動作構成要素を含む。モータ駆動回路は、第1の動作構成要素の始動時間を遅延させて第2の動作構成要素の始動時間と同期させるように構成された時間遅延回路を含む。
好ましくは、さらに整流器を含み、整流器は、第1の出力端子及び第2の出力端子を含み、時間遅延回路は、第1の動作構成要素に直列に接続され、時間遅延回路及び前記第1の動作構成要素の直列分岐は、第1の出力端子及び第2の出力端子の両端間で第2の動作構成要素と並列に接続され、時間遅延回路は、第1の出力端子によって出力された電圧を調整し、調整された電圧を第1の動作構成要素に供給して、第1の出力端子によって第2の動作構成要素に供給される電圧が第2の動作構成要素の始動電圧まで上昇したときに、第1の動作構成要素に供給される電圧が第1の動作構成要素の始動電圧まで上昇することができるように構成される。
好ましくは、時間遅延回路は、分圧ユニット及び電源投入ユニットを含み、分圧ユニットは、ターンオン電圧を有し、分圧ユニットに印加された電圧がターンオン電圧より高いか又はこれに等しい場合にオンになってターンオン電圧にてクランプされ、電源投入ユニットは、分圧ユニットがオンになった後で電圧を発生させ、該電圧を第1の動作構成要素に供給するように構成され、ここで分圧ユニットのターンオン電圧と第1の動作構成要素の始動電圧との合計は、第2の動作構成要素の始動電圧に等しい。
好ましくは、分圧ユニットは、ツェナーダイオードを含み、電源投入ユニットは、抵抗器を含み、ツェナーダイオードのカソードは、第1の出力端子に電気的に接続され、ツェナーダイオードのアノードは、第1の動作構成要素に電気的に接続され、かつ抵抗器を介して第2の出力端子に電気的に接続され、ツェナーダイオードの降伏電圧は、第2の動作構成要素の始動電圧と第1の動作構成要素の始動電圧との差である。
好ましくは、モータに接続されたインバータをさらに含み、第1の動作構成要素は、モータの回転子の回転位置を検出してトリガ信号を出力するように構成された位置検出器及びモータ駆動部であり、第2の動作構成要素は、インバータを駆動して直流電流を交流電流に変換するように構成されたスイッチ駆動部である。
好ましくは、第1の動作構成要素の始動電圧は、第2の動作構成要素の始動電圧より低い。
好ましくは、インバータは、複数の半導体スイッチトランジスタを含むHブリッジ回路であり、半導体スイッチトランジスタは、MOSFETであり、スイッチ駆動部はMOSFET駆動部である。
好ましくは、モータは、単相直流ブラシレスモータである。
本開示の別の実施形態により、回路が提供され、これは、第1の動作構成要素、第2の動作構成要素及び始動時間制御回路を含む。第1の動作構成要素の始動電圧は、第2の動作構成要素の始動電圧より低く、始動時間制御回路は、第1の動作構成要素の始動時間が第2の動作構成要素の始動時間と同期するよう調節するように構成される。
本開示は、以下、明細書の図面及び幾つかの実施形態との関連でさらに説明される。
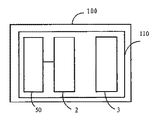
図1を参照すると、これは本開示の実施形態による電子装置100の幾つかの構成要素の機能モジュール図である。電子装置100は、回路110を含む。回路110は、始動時間制御回路50、第1の動作構成要素2及び第2の動作構成要素3を含む。好ましくは、始動時間制御回路50は、第1の動作構成要素2の始動時間が第2の動作構成要素3と同期するように調節するよう構成された時間遅延回路である。
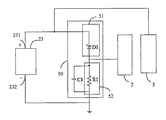
図2を参照すると、これは本開示の実施形態による電子装置100の詳細図である。図2に示すように、電子装置100は、整流器23をさらに含み、これはアノード出力端子231及びカソード出力端子232を含み、供給電圧にアクセスするように構成される。第1の動作構成要素2は、第1の始動電圧を有し、第2の動作構成要素3は、第1の始動電圧より高い第2の始動電圧を有する。始動時間制御回路50は、第1の動作構成要素2直列に接続し、始動時間制御回路50及び第1の動作構成要素2の直列分岐は、整流器23のアノード出力端子231及びカソード出力端子232の両端間で第2の動作構成要素3と並列に接続する。始動時間制御回路50は、アノード出力端子231によって出力された電圧を調整し、調整された電圧を第1の動作構成要素2に供給して、アノード出力端子231によって第2の動作構成要素3に供給される電圧が第2の動作構成要素3の始動電圧まで上昇したときに、第1の動作構成要素2に供給される電圧が第1の動作構成要素2の始動電圧まで上昇することができるように構成される。
詳細には、始動時間制御モジュール50は、整流器23のアノード出力端子231及びカソード出力端子232の両端間に直列に接続された分圧ユニット51及び電源投入ユニット52を含む。第2の動作構成要素3は、整流器23のアノード出力端子231に直接接続される。分圧ユニット51は、ターンオン電圧を有し、分圧ユニット51に印加された電圧がターンオン電圧より高いか又はそれに等しい場合、分圧ユニット51はオンになってターンオン電圧にてクランプされる。ターンオン電圧は、アノード出力端子231の出力電圧の、分圧ユニット51によって分担される部分電圧である。電源投入ユニット52は、分圧ユニット51がオンになった後で電圧を発生させ、該電圧を第1の動作構成要素2に供給するように構成される。
分圧ユニット51のターンオン電圧と第1の動作構成要素2の始動電圧との合計は、第2の動作構成要素3の始動電圧に等しい。従って、整流器23によって出力された電圧が分圧ユニット51のターンオン電圧よりも高い場合、分圧ユニット51はオンになってターンオン電圧にてクランプされ、整流器23によって出力された電圧が上昇し続けると、電圧の増分が電源投入ユニット52に印加されることになる。整流器23によって出力された電圧が上昇し続けて電源投入ユニット52の電圧が第1の動作構成要素2の始動電圧と等しくなった場合、第1の動作構成要素2が動作を開始する。この場合、整流器23によって出力された電圧は、第1の動作構成要素2の始動電圧と分圧ユニット51のターンオン電圧との合計に等しく、すなわち、第2の動作構成要素3の始動電圧に等しく、第2の動作構成要素3が同時に始動する。それにより、第1の動作構成要素2と第2の動作構成要素3との同期始動が達成される。
一例において、分圧ユニット51は、ツェナーダイオードD1を含み、電源投入ユニット52は、抵抗器R1を含む。ツェナーダイオードD1のカソードは、アノード出力端子231に接続され、ツェナーダイオードD1のアノードは、第1の動作構成要素32に接続され、かつ抵抗器R1を介して整流器23のカソード出力端子232に接続される。ツェナーダイオードD1の降伏電圧は、第2の動作構成要素33の始動電圧と、第1の動作構成要素32の始動電圧との差である。それにより、整流器23によって出力された電圧がツェナーダイオードD1の降伏電圧より高い場合、ツェナーダイオードD1は導電性になり、抵抗器R1は、電圧を発生する。整流器23によって出力された電圧がツェナーダイオードD1の降伏電圧と第1の動作構成要素32の始動電圧との合計に等しい場合、抵抗器R1によって発生する電圧は、第1の動作構成要素32の始動電圧であり、それにより第1の動作構成要素32を駆動して始動させる。
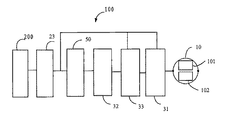
図3を参照すると、これは本開示の実施形態による電子装置100のブロック回路図である。実施形態において、電子装置100は、モータ10及びインバータ31をさらに含み、モータ10は、固定子101と、該回転子101に対して回転する回転子102とを含む。詳細には、第1の動作構成要素2は、位置検出器及びモータ駆動部32であり、第2の動作構成要素3は、スイッチ駆動部33である。電子装置100は、ヘアドライヤ、真空掃除機、動力工具、又は空気調和装置などの、モータ10を有するあらゆる適切な装置とすることができる。
実施形態において、整流器23は、AC−DC変換器であり、交流電源200にアクセスし、交流電源200によって供給される交流供給電圧を直流電圧に変換するように構成される。インバータ31は、整流器23とモータ10との間に電気的に接続される。位置検出器及びモータ駆動部32は、モータ10の回転子102の回転位置を検出してトリガ信号を出力するように構成される。スイッチ駆動部33は、インバータ31と位置検出器及びモータ駆動部32との両方に電気的に接続し、位置検出器及びモータ駆動部32によって検出された回転子102の回転位置に基づいて、インバータ31を駆動して、整流器23によって発生した直流電流を交流電流に変換し、それにより回転子102を駆動して回転させ続けるように構成される。
交流電源200は、好ましくは、幹線電源、例えば電圧120V(ボルト)又は230Vの幹線電源である。
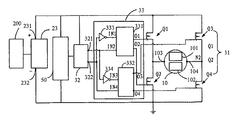
詳細には、図4に示すように、モータ10は、第1の電極端子103及び第2の電極端子104をさらに含み、固定子101は、巻線1011を含み、固定子101の2つの端子は、それぞれ第1の電極端子103及び第2の電極端子104に電気的に接続される。本開示によるインバータ31は、Hブリッジ回路であり、これは、整流器23のアノード出力端子231及びカソード出力端子232と、第1の電極端子103と、第2の電極端子104との間に電気的に接続され、第1の電源路又は第2の電源路を、整流器23のアノード出力端子231及びカソード出力端子232と、第1の電極端子103と、第2の電極端子104との間に確立するように構成される。
位置検出器及びモータ駆動部32は、単相直流ブラシレスモータ10の回転子102の回転位置を検出し、第1のトリガ信号又は第2のトリガ信号を発生し、これをスイッチ駆動部33に伝送するように構成される。第1のトリガ信号が受信された場合、スイッチ駆動部33は、インバータ31を駆動して第1の電源路を確立する。第2のトリガ信号が受信された場合、スイッチ駆動部33は、インバータ31を駆動して第2の電源路を確立する。
第1の電源路において、整流器及びフィルタ回路23のアノード出力端子231及びカソード出力端子232は、それぞれ第1の電極端子103及び第2の電極端子104に接続される。第2の電源路において、整流器及びフィルタ回路23のアノード出力端子231及びカソード出力端子232は、それぞれ第2の電極端子104及び第1の電極端子103に接続される。
実施形態において、回転子102は、永久磁石を含み、固定子101に対して回転することができる。位置検出器及びモータ駆動部32は、単相直流ブラシレスモータ10の近くに配置され、回転子102のN磁極が検出された場合には第1のトリガ信号を発生し、回転子102のS磁極が検出された場合には第2のトリガ信号を発生する。これにより、回転子のN磁極又はS磁極が回転して位置検出器及びモータ駆動部32の近くにくるたびに、位置検出器及びモータ駆動部32は、対応するトリガ信号を発生し、スイッチ駆動部33をトリガしてインバータ31を駆動させ、対応する電源路を確立する。これにより、単相直流ブラシレスモータ10の第1の電極端子103及び第2の電極端子104に対する電源の正極性及び負極性が入れ替わり、その結果、固定子101の巻線1011を通って流れる電流の方向が交互に変化して交流磁界を発生し、回転子102を駆動して回転させ続けることができるようになっている。代替的な実施形態において、位置検出器及びモータ駆動部32は、回転子102のS磁極が検出された場合に第1のトリガ信号を発生させ、回転子102のN磁極が検出された場合に第2のトリガ信号を発生させることができることを理解されたい。
好ましい実施形態において、モータ10は、単相直流ブラシレスモータであり、固定子の磁極及び回転子の磁極の数は同数であって6を上回る。
詳細には、図4に示すように、実施形態において、インバータ31は、Hブリッジ回路であり、これは第1の半導体スイッチQ1、第2の半導体スイッチQ2、第3の半導体スイッチQ3及び第4の半導体スイッチQ4を含む。第1の半導体スイッチQ1及び第2の半導体スイッチQ2は、順に整流器23のアノード出力端子231及びカソード出力端子232の両端間に直列に接続され、第3の半導体スイッチQ3及び第4の半導体スイッチQ4は、順に整流器23のアノード出力端子231及びカソード出力端子232の両端間に直列に接続される。すなわち、半導体スイッチQ1及び第2の半導体スイッチQ2の分岐と、第3の半導体スイッチQ3及び第4の半導体スイッチQ4の分岐とが、整流器23のアノード出力端子231及びカソード出力端子232の両端間に並列に接続される。単相直流ブラシレスモータ10の第1の電極端子103及び第2の電極端子104は、それぞれ、第1の半導体スイッチQ1と第2の半導体スイッチQ2との接続ノードN1、及び第3の半導体スイッチQ3と第4の半導体スイッチQ4との接続ノードN2に接続される。
スイッチ駆動部33は、第1の半導体スイッチQ1、第2の半導体スイッチQ2、第3の半導体スイッチQ3及び第4の半導体スイッチQ4の各々に電気的に接続される。第1のトリガ信号を受信した場合、スイッチ駆動部33は、第1の半導体スイッチQ1及び第4の半導体スイッチQ4がオンになり、第2の半導体スイッチQ2及び第3の半導体スイッチQ3がオフになるように駆動する。この場合、単相直流ブラシレスモータ10の第1の電極端子103は、オンにされた第1の半導体スイッチQ1を介して整流器23のアノード出力端子231に接続され、単相直流ブラシレスモータ10の第2の電極端子104は、オンにされた第4の半導体スイッチQ4を介して整流器23のカソード出力端子232に接続される。それにより、この場合のインバータ31は、第1の電源路を形成する。
第2のトリガ信号を受信した場合、スイッチ駆動部33は、第2の半導体スイッチQ2及び3の半導体スイッチQ3がオンになり、第1の半導体スイッチQ1及び第4の半導体スイッチQ4をオフになるように駆動する。この場合、単相直流ブラシレスモータ10の第1の電極端子103は、オンにされた第2の半導体スイッチQ2を介して整流器23のカソード出力端子232に接続され、単相直流ブラシレスモータ10の第2の電極端子104は、オンにされた3の半導体スイッチQ3を介して整流器23のアノード出力端子231に接続される。それにより、この場合のインバータ31は、第2の電源路を形成する。
従って上述のように、位置検出器及びモータ駆動部32は第1のトリガ信号と第2のトリガ信号とを交互に発生し、これはスイッチ駆動部33がインバータ31を駆動させて第1の電源路と第2の電源路とを交互に確立することを可能にし、それにより固定子101を通って流れる電流の方向を変更して、回転子102を駆動して回転させ続ける。
実施形態において、スイッチ駆動部33は、MOSFET駆動部である。4つの半導体スイッチのうち少なくとも1つはMOSFETである。例えば、第1の半導体スイッチQ1、第2の半導体スイッチQ2、第3の半導体スイッチQ3及び第4の半導体スイッチQ4の全てがMOSFETであるか、又は4つの半導体スイッチのうちの幾つかがMOSFETであり、他のものはIGBT又はトリオードBJTである。スイッチ駆動部33は、第1の半導体スイッチQ1、第2の半導体スイッチQ2、第3の半導体スイッチQ3及び第4の半導体スイッチQ4のゲート又はベースに接続され、対応して、第1の半導体スイッチQ1、第2の半導体スイッチQ2、第3の半導体スイッチQ3及び第4の半導体スイッチQ4を駆動してオン又はオフにするように構成される。
図5を参照すると、これは本開示の実施形態による電子装置100のより詳細なブロック回路図であり、スイッチ駆動部33の特定の構造を模式的に示す。図5に示すように、スイッチ駆動部33は、第1の半ブリッジ駆動部331、第2の半ブリッジ駆動部332、第1の位相反転器333及び第2の位相反転器334を含む。位置検出器及びモータ駆動部32は、第1のトリガ端子321及び第2のトリガ端子322を含む。第1の半ブリッジ駆動部331は、第1の入力端子IN1、第2の入力端子IN2、第1の出力端子O1及び第2の出力端子O2を含む。第2の半ブリッジ駆動部332は、第1の入力端子IN3、第2の入力端子IN4、第1の出力端子O3及び第2の出力端子O4を含む。
位置検出器及びモータ駆動部32の第1のトリガ端子321は、第1の半ブリッジ駆動部331の第2の入力端子IN2に接続し、第2の位相反転器334を介して第2の半ブリッジ駆動部332の第1の入力端子IN3にも接続する。位置検出器及びモータ駆動部32の第2のトリガ端子322は、第1の位相反転器333を介して第1の半ブリッジ駆動部331の第1の入力端子IN1に接続し、第2のトリガ端子322はまた第2の半ブリッジ駆動部332の第2の入力端子IN4にも接続する。
第1の半ブリッジ駆動部331の第1の出力端子O1は、第1の半導体スイッチQ1に接続され、対応する制御信号を出力して第1の半導体スイッチQ1を制御してオン又はオフにするように構成される。第1の半ブリッジ駆動部331の第2の出力端子O2は、第2の半導体スイッチQ2に接続され、対応する制御信号を出力して第2の半導体スイッチQ2を制御してオン又はオフにするように構成される。第2の半ブリッジ駆動部332の第1の出力端子O3は、第3の半導体スイッチQ3に接続され、対応する信号を出力して第3の半導体スイッチQ3を制御してオン又はオフにするように構成される。第2の半ブリッジ駆動部332の第2の出力端子O4は、第4の半導体スイッチQ4に接続され、対応する信号を出力して第4の半導体スイッチQ4を制御してオン又はオフにするように構成される。
第1の半ブリッジ駆動部331の第1の出力端子O1の出力は、第1の入力端子IN1に入力された電圧に従い、第1の半ブリッジ駆動部331の第2の出力端子O2の出力は、第2の入力端子IN2に入力された電圧の逆である。同様に、第2の半ブリッジ駆動部332の第1の出力端子O3の出力は、第1の入力端子IN3の入力に従い、第2の半ブリッジ駆動部332の第2の出力端子O4の出力は、第2の入力端子IN4の入力の逆である。
位置検出器及びモータ駆動部32がN磁極を検出した場合、位置検出器及びモータ駆動部32の第1のトリガ端子321及び第2のトリガ端子322は、それぞれ高レベル及び低レベルを出力し、すなわち、位置検出器及びモータ駆動部32は、第1のトリガ信号「10」を出力する。位置検出器及びモータ駆動部がS磁極を検出した場合、位置検出器及びモータ駆動部32の第1のトリガ端子321及び第2のトリガ端子322は、それぞれ低レベル及び高レベルを出力し、すなわち、位置検出器及びモータ駆動部32は、第2のトリガ信号「01」を出力する。
実施形態において、第1の半導体スイッチQ1、第2の半導体スイッチQ2、第3の半導体スイッチQ3及び第4の半導体スイッチQ4の全てが、NMOSFET、NPNBJTなどのような、高レベルでオンになるスイッチである。
これにより、位置検出器及びモータ駆動部32がN磁極を検出し、高レベル及び低レベルがそれぞれ第1のトリガ端子321及び第2のトリガ端子322から出力された場合、第1のトリガ端子321によって出力された高レベルは、第1の半ブリッジ駆動部331の第2の入力端子IN2に伝送され、かつ第2の位相反転器334によって反転されて低レベルを発生し、該低レベルが第2の半ブリッジ駆動部332の第1の入力端子IN3に伝送される。第1のトリガ端子321によって出力された低レベルは、第2の半ブリッジ駆動部332の第2の入力端子IN4に伝送され、かつ第1の位相反転器333によって反転されて高レベルを発生し、該高レベルが第1の半ブリッジ駆動部331の第1の入力端子IN1に伝送される。
この場合、高レベルは、第1の半ブリッジ駆動部331の第1の入力端子IN1及び第2の入力端子IN2の各々に入力され、低レベルは、第2の半ブリッジ駆動部332の第1の入力端子IN3及び第2の入力端子IN4の各々に入力される。上述のように、半ブリッジ駆動部の第1の出力端子の電圧は、第1の入力端子の電圧に従い、該半ブリッジ駆動部の第2の出力端子の電圧は、第2の入力端子の電圧の逆である。従って、第1の半ブリッジ駆動部331の第1の出力端子O1及び第2の出力端子O2は、それぞれ高レベル及び低レベルを出力して、第1の半導体スイッチQ1がオンになり、かつ第2の半導体スイッチQ2がオフになるように制御する。第2の半ブリッジ駆動部332の第1の出力端子O3及び第2の出力端子O4は、それぞれ低レベル及び高レベルを出力して、第3の半導体スイッチQ3がオフになり、かつ第4の半導体スイッチQ4がオンになるように制御する。
この場合、単相直流ブラシレスモータ10の第1の電極端子103は、オンにされた第1の半導体スイッチQ1を介して整流器23のアノード出力端子231に接続し、単相直流ブラシレスモータ10の第2の電極端子104は、オンにされた第4の半導体スイッチQ4を介して整流器23のカソード出力端子232に接続する。これにより、インバータ31は第1の電源路を形成し、単相直流ブラシレスモータ10の固定子101を通る電流は、第1の流れ方向に流れる。
位置検出器及びモータ駆動部32がS磁極を検出し、第1のトリガ端子321及び第2のトリガ端子322がそれぞれ、低レベル及び高レベルを出力した場合、第1のトリガ端子321によって出力された低レベルは、第1の半ブリッジ駆動部331の第2の入力端子IN2に伝送され、かつ第2の位相反転器334によって反転されて高レベルを発生し、該高レベルが第2の半ブリッジ駆動部331の第1の入力端子IN3に伝送される。第2のトリガ端子322によって出力された高レベルは、第2の半ブリッジ駆動部332の第2の入力端子IN4に伝送され、かつ第1の位相反転器333によって反転されて低レベルを発生し、該低レベルが第1の半ブリッジ駆動部331の第1の入力端子IN1に伝送される。
この場合、低レベルは、第1の半ブリッジ駆動部331の第1の入力端子IN1及び第2の入力端子IN2の各々に入力され、高レベルは、第2の半ブリッジ駆動部332の第1の入力端子IN3及び第2の入力端子IN4の各々に入力される。対応して、第1の半ブリッジ駆動部331の第1の出力端子O1及び第2の出力端子O2は、それぞれ低レベル及び高レベルを出力して、第1の半導体スイッチQ1がオフになり、かつ第2の半導体スイッチQ2がオンになるように制御する。第2の半ブリッジ駆動部332の第1の出力端子O3及び第2の出力端子O4は、それぞれ高レベル及び低レベルを出力して、第3の半導体スイッチQ3がオンになり、かつ第4の半導体スイッチQ4がオフになるように制御する。
この場合、単相直流ブラシレスモータ10の第1の電極端子103は、オンにされた第2の半導体スイッチQ2を介して整流器23のカソード出力端子232に接続し、単相直流ブラシレスモータ10の第2の電極端子104は、オンにされた第3の半導体スイッチQ3を介して整流器23のアノード出力端子231に接続する。これにより、インバータ31は第2の電源路を形成し、単相直流ブラシレスモータの固定子101を通る電流は、第1の流れ方向と逆向きの第2の流れ方向に流れる。
第1の半ブリッジ駆動部331及び第2の半ブリッジ駆動部332は、駆動するのに大電流を必要とするMOSFETを駆動することができるように、位置検出器及びモータ駆動部32によって出力される高レベル又は低レベルをブーストするように構成される。インバータ31内にMOSFETが存在しない場合、第1の半導体スイッチQ1、第2の半導体スイッチQ2、第3の半導体スイッチQ3及び第4の半導体スイッチQ4は、第1の半ブリッジ駆動部331及び第2の半ブリッジ駆動部332なしで、すなわちスイッチ駆動部33なしで、位置検出器及びモータ駆動部32によって出力されたトリガ信号によって直接駆動してオン又はオフにすることができる。例えば、位置検出器及びモータ駆動部32の第1のトリガ端子321は、第1の半導体スイッチQ1及び第4の半導体スイッチQ4に接続され、第1の半導体スイッチQ1及び第4の半導体スイッチQ4を制御して同時にオン又はオフにする。位置検出器及びモータ駆動部32の第2のトリガ端子322は、第2の半導体スイッチQ2及び第3の半導体スイッチQ3に接続され、第2の半導体スイッチQ2及び第3の半導体スイッチQ3を制御して同時にオン又はオフにする。
好ましい実施形態において、第1の半ブリッジ駆動部331及び第2の半ブリッジ駆動部332は各々、IR2103チップとすることができる。位置検出器及びモータ駆動部32は、ホール効果コントローラとすることができ、これはホールセンサ及び対応する制御モジュールを含み、AH284チップとすることができる。ホール効果コントローラチップは、少なくとも4ピンを含み、すなわち、上述の第1のトリガ端子321及び第2のトリガ端子322、並びに電源ピン及び接地ピンであり、電源ピン及び接地ピンは、整流器23のアノード出力端子231及びカソード出力端子232にそれぞれ電気的に接続される。あるいは、位置検出器及びモータ駆動部32は、電流センサ及び対応する制御モジュールを含むことができ、これは、電流の変化を検出することによってN磁極及びS磁極を判定し、対応する制御信号を出力する。第1の半ブリッジ駆動部331、第2の半ブリッジ駆動部332並びに位置検出器及びモータ駆動部32はまた、他のいずれかの適切なチップとすることもでき、上で挙げたチップは、実用的な実装のための参考として意図されているに過ぎない。
スイッチ駆動部33が第1の半ブリッジ駆動部331及び第2の半ブリッジ駆動部332を含む場合、第2の動作構成要素3(すなわち、スイッチ駆動部33)の始動電圧は、第1の半ブリッジ駆動部331及び第2の半ブリッジ駆動部332の始動電圧を指す。
本開示の図面内の構成要素間の位置関係は、製品内の構成要素の配置を表すのではなく、単に電気的及び論理的関係である。
上述の実施形態は、本発明の幾つかの好ましい実施形態に過ぎず、これは本発明をいかなる形でも限定しない。加えて、当業者は本開示の思想の範囲内で変更を行うことができ、当然のことながら、本開示の思想の範囲内で行った変更は、本開示の範囲内に入るものとする。
例えば、さらなる実施形態において、第1の動作構成要素の始動時間は、上記実施形態による始動時間制御回路以外のいずれかの適切な時間遅延回路によって、第2の動作構成要素の始動時間と同期するように遅延させることができる。
2:第1の動作構成要素
3:第2の動作構成要素
10:モータ
23:整流器
31:インバータ
32:位置検出器及びモータ駆動部
33:スイッチ駆動部
50:始動時間制御回路
51:分圧ユニット
52:電源投入ユニット
100:電子装置
101:固定子
102:回転子
103:第1の電極端子
104:第2の電極端子
110:回路
200:交流電源
231:アノード出力端子
232:カソード出力端子
321:第1のトリガ端子
322:第2のトリガ端子
331:第1の半ブリッジ駆動部
332:第2の半ブリッジ駆動部
333:第1の位相反転器
334:第2の位相反転器
3:第2の動作構成要素
10:モータ
23:整流器
31:インバータ
32:位置検出器及びモータ駆動部
33:スイッチ駆動部
50:始動時間制御回路
51:分圧ユニット
52:電源投入ユニット
100:電子装置
101:固定子
102:回転子
103:第1の電極端子
104:第2の電極端子
110:回路
200:交流電源
231:アノード出力端子
232:カソード出力端子
321:第1のトリガ端子
322:第2のトリガ端子
331:第1の半ブリッジ駆動部
332:第2の半ブリッジ駆動部
333:第1の位相反転器
334:第2の位相反転器
Claims (10)
- モータとモータ駆動回路とを含む電子装置であって、前記モータ駆動回路が、第1の動作構成要素及び第2の動作構成要素を含み、
前記モータ駆動回路が、前記第1の動作構成要素の始動時間を遅延させて前記第2の動作構成要素の始動時間と同期させるように構成された時間遅延回路を含むことを特徴とする、電子装置。 - さらに整流器を含み、
前記整流器は、第1の出力端子及び第2の出力端子を含み、
前記時間遅延回路は、前記第1の動作構成要素に直列に接続され、前記時間遅延回路及び前記第1の動作構成要素の直列分岐は、前記第1の出力端子及び前記第2の出力端子の両端間で前記第2の動作構成要素と並列に接続され、前記時間遅延回路は、前記第1の出力端子によって出力された電圧を調整し、調整された電圧を前記第1の動作構成要素に供給して、前記第1の出力端子によって前記第2の動作構成要素に供給される電圧が前記第2の動作構成要素の始動電圧まで上昇したときに、前記第1の動作構成要素に供給される電圧が前記第1の動作構成要素の始動電圧まで上昇することができるように構成されたことを特徴とする、請求項1に記載の電子装置。 - 前記時間遅延回路は、分圧ユニット及び電源投入ユニットを含み、前記分圧ユニットは、ターンオン電圧を有し、前記分圧ユニットに印加された電圧が前記ターンオン電圧より高いか又はこれに等しい場合にオンになって前記ターンオン電圧にてクランプされ、前記電源投入ユニットは、前記分圧ユニットがオンになった後で電圧を発生させ、前記電圧を前記第1の動作構成要素に供給するように構成され、ここで前記分圧ユニットの前記ターンオン電圧と前記第1の動作構成要素の始動電圧との合計が前記第2の動作構成要素の始動電圧に等しいことを特徴とする、請求項1〜請求項2のいずれかに記載の電子装置。
- 前記分圧ユニットは、ツェナーダイオードを含み、前記電源投入ユニットは、抵抗器を含み、前記ツェナーダイオードのカソードは、前記第1の出力端子に電気的に接続され、前記ツェナーダイオードのアノードは、前記第1の動作構成要素に電気的に接続され、かつ前記抵抗器を介して前記第2の出力端子に電気的に接続され、前記ツェナーダイオードの降伏電圧は、前記第2の動作構成要素の前記始動電圧と前記第1の動作構成要素の前記始動電圧との差であることを特徴とする、請求項3に記載の電子装置。
- 前記モータに接続されたインバータをさらに含み、前記第1の動作構成要素は、前記モータの回転子の回転位置を検出してトリガ信号を出力するように構成された位置検出器及びモータ駆動部であり、前記第2の動作構成要素は、前記インバータを駆動して直流電流を交流電流に変換するように構成されたスイッチ駆動部であることを特徴とする、請求項1〜請求項4のいずれかに記載の電子装置。
- 前記第1の動作構成要素の始動電圧が前記第2の動作構成要素の始動電圧より低いことを特徴とする、請求項1〜請求項5のいずれかに記載の電子装置。
- 前記インバータが複数の半導体スイッチトランジスタを含むHブリッジ回路であり、前記半導体スイッチトランジスタがMOSFETであり、前記スイッチ駆動部がMOSFET駆動部であることを特徴とする、請求項5に記載の電子装置。
- 第1の動作構成要素、第2の動作構成要素及び始動時間制御回路を含む回路であって、
前記第1の動作構成要素の始動電圧は、前記第2の動作構成要素の始動電圧より低く、前記始動時間制御回路は、前記第1の動作構成要素の始動時間が前記第2の動作構成要素の始動時間と同期するよう調節するように構成されることを特徴とする、回路。 - 前記始動時間制御回路は、前記第1の動作構成要素に直列に接続され、前記始動時間制御回路及び前記第1の動作構成要素の直列分岐は、直流電圧の両端間で前記第2の動作構成要素と並列に接続され、前記始動時間制御回路は、前記直流電圧を調整し、調整された電圧を前記第1の動作構成要素に供給して、前記第2の動作構成要素に供給される電圧が前記第2の動作構成要素の始動電圧まで上昇したときに、電圧前記第1の動作構成要素に供給される電圧が前記第1の動作構成要素の始動電圧まで上昇することができるように構成されたことを特徴とする、請求項8に記載の回路。
- 前記始動時間制御回路は、分圧ユニット及び電源投入ユニットを含み、前記分圧ユニットは、ターンオン電圧を有し、前記分圧ユニットに印加された電圧が前記ターンオン電圧より高いか又はこれに等しい場合にオンになって前記ターンオン電圧にてクランプされ、前記電源投入ユニットは、前記分圧ユニットがオンになった後で電圧を発生させ、前記電圧を前記第1の動作構成要素に供給するように構成され、ここで前記分圧ユニットの前記ターンオン電圧と前記第1の動作構成要素の始動電圧との合計が、前記第2の動作構成要素の始動電圧に等しいことを特徴とする、請求項8〜請求項9のいずれかに記載の回路。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201510648593.7A CN106571752A (zh) | 2015-10-09 | 2015-10-09 | 电子装置及电路 |
| CN201510648593.7 | 2015-10-09 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017093281A true JP2017093281A (ja) | 2017-05-25 |
| JP2017093281A5 JP2017093281A5 (ja) | 2019-09-19 |
Family
ID=57391742
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016199770A Abandoned JP2017093281A (ja) | 2015-10-09 | 2016-10-11 | 電子装置及び回路 |
| JP2017000553U Expired - Fee Related JP3212779U (ja) | 2015-10-09 | 2017-02-10 | 電子装置及び回路 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017000553U Expired - Fee Related JP3212779U (ja) | 2015-10-09 | 2017-02-10 | 電子装置及び回路 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US10256750B2 (ja) |
| EP (1) | EP3154184A1 (ja) |
| JP (2) | JP2017093281A (ja) |
| KR (1) | KR20170044031A (ja) |
| CN (1) | CN106571752A (ja) |
| BR (1) | BR102016023315A2 (ja) |
| DE (1) | DE202016105541U1 (ja) |
| MX (1) | MX2016012949A (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106562547A (zh) * | 2015-10-09 | 2017-04-19 | 德昌电机(深圳)有限公司 | 吹风机 |
| CN106571725A (zh) * | 2015-10-09 | 2017-04-19 | 德昌电机(深圳)有限公司 | 气流调节装置 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3525195B2 (ja) * | 1994-08-02 | 2004-05-10 | 光洋精工株式会社 | 電動パワーステアリング装置 |
| IT1289817B1 (it) * | 1996-12-30 | 1998-10-16 | Plaset Srl | Dispositivo per il controllo di un motore elettrico sincrono con rotore a magnete permanente |
| JP3591314B2 (ja) * | 1998-07-15 | 2004-11-17 | 株式会社日立製作所 | ブラシレスモータの制御装置及びこの制御装置を使用した機器 |
| US6262546B1 (en) * | 1999-07-01 | 2001-07-17 | Delphi Technologies, Inc. | Variable threshold motor commutation pulse detection circuit |
| IT1318856B1 (it) * | 2000-09-14 | 2003-09-10 | St Microelectronics Srl | Circuito di rilevamento del passaggio per lo zero della corrente. |
| US6864616B2 (en) * | 2001-10-09 | 2005-03-08 | General Electric Company | Method and apparatus for forming an electric motor having stacked laminations |
| CN101201060B (zh) * | 2006-12-12 | 2012-10-10 | 台达电子工业股份有限公司 | 风扇系统及其启动方法 |
| CN205092797U (zh) * | 2015-10-09 | 2016-03-16 | 德昌电机(深圳)有限公司 | 电子装置及电路 |
-
2015
- 2015-10-09 CN CN201510648593.7A patent/CN106571752A/zh not_active Withdrawn
-
2016
- 2016-09-30 EP EP16191927.9A patent/EP3154184A1/en not_active Withdrawn
- 2016-10-03 MX MX2016012949A patent/MX2016012949A/es unknown
- 2016-10-05 DE DE202016105541.5U patent/DE202016105541U1/de not_active Expired - Lifetime
- 2016-10-06 BR BR102016023315A patent/BR102016023315A2/pt not_active Application Discontinuation
- 2016-10-07 US US15/288,726 patent/US10256750B2/en not_active Expired - Fee Related
- 2016-10-07 KR KR1020160129754A patent/KR20170044031A/ko unknown
- 2016-10-11 JP JP2016199770A patent/JP2017093281A/ja not_active Abandoned
-
2017
- 2017-02-10 JP JP2017000553U patent/JP3212779U/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US20170104427A1 (en) | 2017-04-13 |
| EP3154184A1 (en) | 2017-04-12 |
| US10256750B2 (en) | 2019-04-09 |
| JP3212779U (ja) | 2017-10-05 |
| CN106571752A (zh) | 2017-04-19 |
| BR102016023315A2 (pt) | 2020-02-04 |
| DE202016105541U1 (de) | 2017-02-02 |
| KR20170044031A (ko) | 2017-04-24 |
| MX2016012949A (es) | 2018-04-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3202526U (ja) | 永久磁石モータのための駆動回路 | |
| JP6077668B2 (ja) | 分割相交流同期モータコントローラ | |
| US20160344322A1 (en) | Motor, motor driving circuit and integrated circuit for driving motor | |
| CN108336942B (zh) | 三相电机驱动电路 | |
| JP3212779U (ja) | 電子装置及び回路 | |
| US10295371B2 (en) | Electronic device and magnetic sensor integrated circuit | |
| US20220149760A1 (en) | Alternating current power tool and startup method thereof | |
| US20160344318A1 (en) | Motor, motor driving circuit and integrated circuit for driving motor | |
| KR20190129902A (ko) | 다중 속도 교류 모터 | |
| JP2016111911A (ja) | モータ駆動装置 | |
| US10637374B2 (en) | Magnetic sensor integrated circuit, motor component and application apparatus | |
| US20160344311A1 (en) | Application device and motor driving circuit | |
| JP6375758B2 (ja) | モータ制御装置およびそれを用いた空気調和機 | |
| US20180109208A1 (en) | Synchronous motor assembly, pump, and ventilation fan using same | |
| CN205092797U (zh) | 电子装置及电路 | |
| US11489477B2 (en) | Semi-symmetric switching | |
| JP3209106U (ja) | 磁気センサ集積回路及びモータ組立体 | |
| BR102016018038A2 (pt) | Integrated magnetic sensor circuit to control an engine, and, engine assembly | |
| JP2014117132A (ja) | モータ駆動装置 | |
| KR20170017822A (ko) | 모터 구동 회로 및 모터 구성요소 | |
| KR20170017834A (ko) | 모터 구성 요소 및 센서 집적 회로 | |
| KR20170017839A (ko) | 자기 센서 집적 회로 및 모터 어셈블리 | |
| KR20170017840A (ko) | 모터, 모터 구동 회로 및 모터 구동을 위한 집적 회로 | |
| KR20170017772A (ko) | 자기 센서 집적 회로 및 모터 구성요소 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20190709 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190809 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190809 |
|
| A762 | Written abandonment of application |
Free format text: JAPANESE INTERMEDIATE CODE: A762 Effective date: 20191112 |