JP2017017875A - Linear vibration motor - Google Patents
Linear vibration motor Download PDFInfo
- Publication number
- JP2017017875A JP2017017875A JP2015132762A JP2015132762A JP2017017875A JP 2017017875 A JP2017017875 A JP 2017017875A JP 2015132762 A JP2015132762 A JP 2015132762A JP 2015132762 A JP2015132762 A JP 2015132762A JP 2017017875 A JP2017017875 A JP 2017017875A
- Authority
- JP
- Japan
- Prior art keywords
- mover
- magnet
- vibration motor
- linear vibration
- guide shaft
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000005484 gravity Effects 0.000 claims abstract description 10
- 239000011248 coating agent Substances 0.000 claims description 4
- 238000000576 coating method Methods 0.000 claims description 4
- 239000000696 magnetic material Substances 0.000 claims description 2
- 230000002159 abnormal effect Effects 0.000 abstract description 6
- 230000001846 repelling effect Effects 0.000 abstract description 4
- BGPVFRJUHWVFKM-UHFFFAOYSA-N N1=C2C=CC=CC2=[N+]([O-])C1(CC1)CCC21N=C1C=CC=CC1=[N+]2[O-] Chemical compound N1=C2C=CC=CC2=[N+]([O-])C1(CC1)CCC21N=C1C=CC=CC1=[N+]2[O-] BGPVFRJUHWVFKM-UHFFFAOYSA-N 0.000 abstract 3
- 230000002401 inhibitory effect Effects 0.000 abstract 1
- 239000000463 material Substances 0.000 description 4
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 230000003014 reinforcing effect Effects 0.000 description 2
- 125000006850 spacer group Chemical group 0.000 description 2
- VYZAMTAEIAYCRO-UHFFFAOYSA-N Chromium Chemical compound [Cr] VYZAMTAEIAYCRO-UHFFFAOYSA-N 0.000 description 1
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 1
- RTAQQCXQSZGOHL-UHFFFAOYSA-N Titanium Chemical compound [Ti] RTAQQCXQSZGOHL-UHFFFAOYSA-N 0.000 description 1
- 239000000969 carrier Substances 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 229910052802 copper Inorganic materials 0.000 description 1
- 239000010949 copper Substances 0.000 description 1
- 238000011038 discontinuous diafiltration by volume reduction Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000007769 metal material Substances 0.000 description 1
- 238000007747 plating Methods 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000035807 sensation Effects 0.000 description 1
- 238000004381 surface treatment Methods 0.000 description 1
- 239000010936 titanium Substances 0.000 description 1
- 229910052719 titanium Inorganic materials 0.000 description 1
- WFKWXMTUELFFGS-UHFFFAOYSA-N tungsten Chemical compound [W] WFKWXMTUELFFGS-UHFFFAOYSA-N 0.000 description 1
- 229910052721 tungsten Inorganic materials 0.000 description 1
- 239000010937 tungsten Substances 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images




Landscapes
- Reciprocating, Oscillating Or Vibrating Motors (AREA)
- Linear Motors (AREA)
Abstract
Description
本発明は、リニア振動モータに関するものである。 The present invention relates to a linear vibration motor.
振動モータ(或いは振動アクチュエータ)は、携帯電子機器に内蔵され、着信やアラームなどの信号発生を振動によって携帯者に伝える装置として広く普及しており、携帯者が身につけて持ち運ぶウエアラブル電子機器においては、不可欠な装置になっている。また、振動モータは、タッチパネルなどのヒューマン・インターフェイスにおけるハプティクス(皮膚感覚フィードバック)を実現する装置として、近年注目されている。 Vibration motors (or vibration actuators) are widely used as devices that are built in portable electronic devices and transmit signal generation such as incoming calls and alarms to vibration carriers by vibrations. , Has become an indispensable device. In recent years, a vibration motor has attracted attention as a device that realizes haptics (skin sensation feedback) in a human interface such as a touch panel.
振動モータは、各種の形態が開発されている中で、可動子の直線的な往復振動によって比較的大きな振動を発生させることができるリニア振動モータが注目されている。従来のリニア振動モータは、可動子側に錘とマグネットを設け、固定子側に設けたコイルに通電することでマグネットに作用するローレンツ力が駆動力となり、振動方向に沿って弾性支持される可動子を往復振動させるものである(下記特許文献1参照)。
As various types of vibration motors have been developed, attention has been paid to linear vibration motors that can generate relatively large vibrations by linear reciprocating vibration of the mover. A conventional linear vibration motor is provided with a weight and a magnet on the mover side, and a Lorentz force acting on the magnet by energizing a coil provided on the stator side serves as a driving force, which is elastically supported along the vibration direction. The child is reciprocally vibrated (see
携帯電子機器の小型化・薄型化に伴い、それに装備される振動モータには一層の小型化・薄型化の要求がなされている。特に、スマートフォンなどのフラットパネル表示部を備える電子機器においては、表示面と直交する厚さ方向の機器内スペースが限られているので、そこに配備される振動モータには薄型化の高い要求がある。 With the reduction in size and thickness of portable electronic devices, there is a demand for further reduction in size and thickness of vibration motors installed therein. In particular, in an electronic device equipped with a flat panel display unit such as a smartphone, the space in the device in the thickness direction orthogonal to the display surface is limited. is there.
リニア振動モータの薄型化を実現する際に、マグネット体積を十分に確保して所望の駆動力を得ると共に錘の質量を十分に確保して所望の慣性力を得ようとすると、マグネットと錘を備える可動子を扁平状にして、マグネットの体積と錘の質量を確保しながら薄厚化を図ることになる。この場合、仮に、直線的な振動軸周りに可動子が回転すると、扁平状の可動子は、回転によって側部が周囲の枠体に衝突しやすい形状になっているので、衝突による異音が発生して作動音になり、また、回転によるがたつきで安定した動作が得られない問題が生じる。 When thinning the linear vibration motor, if the magnet volume is sufficiently secured to obtain the desired driving force and the mass of the weight is sufficiently secured to obtain the desired inertial force, the magnet and the weight are The mover provided is made flat, and the thickness is reduced while securing the volume of the magnet and the mass of the weight. In this case, if the mover rotates around the linear vibration axis, the flat mover has a shape in which the side part easily collides with the surrounding frame body due to the rotation. Occurring and operating noise occurs, and there is a problem that stable operation cannot be obtained due to rattling due to rotation.
このため、従来技術は、2本の固定シャフトを設けて可動子の振動軸周りの回転を抑え、安定した直線振動を実現している。しかしながら、2本の固定シャフトを設けると、マグネットの両サイドに2本の固定シャフトが配置されるので、リニア振動モータの幅が大きくなる問題が生じる。近年の小型化した電子機器に装備するリニア振動モータとしては、厚さ方向だけで無く幅方向に関してもよりコンパクトなものが求められている。更に、2本のガイドシャフトの平行を確保する必要があり、組み付けに高い精度が求められるので、生産性の向上が困難になる問題があった。 For this reason, the prior art provides two fixed shafts to suppress rotation around the vibration axis of the mover and realizes stable linear vibration. However, when two fixed shafts are provided, two fixed shafts are arranged on both sides of the magnet, which causes a problem that the width of the linear vibration motor becomes large. In recent years, linear vibration motors equipped in miniaturized electronic devices are required to be more compact not only in the thickness direction but also in the width direction. Furthermore, since it is necessary to ensure the parallelism of the two guide shafts and high accuracy is required for assembly, there is a problem that it is difficult to improve productivity.
本発明は、このような問題に対処することを課題の一例とするものである。すなわち、リニア振動モータの薄型化を可能にすること、可動子を扁平状にした場合にも、可動子が振動軸周りに回転して作動音(異音)が発生するのを抑止すること、がたつきの無い安定した振動を得ること、厚さ及び幅のコンパクト化を可能とし、生産性の向上を図ること、などが本発明の目的である。 This invention makes it an example of a subject to cope with such a problem. That is, enabling the linear vibration motor to be thinned, and preventing the mover from rotating around the vibration axis and generating operating noise (abnormal noise) even when the mover is made flat. It is an object of the present invention to obtain stable vibration without rattling, to make the thickness and width compact, and to improve productivity.
このような目的を達成するために、本発明によるリニア振動モータは、以下の構成を具備するものである。
マグネット部と錘部を備える可動子と、前記可動子を一軸方向に沿って摺動自在に支持する枠体と、前記枠体に固定され前記マグネット部を前記一軸方向に沿って駆動するコイルと、前記マグネット部に付与される駆動力に反発する弾性力を前記可動子に付与する弾性部材と、前記可動子の重心軸と同軸に配置され、前記可動子の振動を案内するガイドシャフトとを備え、前記枠体は、前記可動子を前記ガイドシャフト回りの一方向に磁力吸引する磁力吸引部と、前記可動子の一部を摺動支持する摺動支持部を備えることを特徴とするリニア振動モータ。
In order to achieve such an object, a linear vibration motor according to the present invention has the following configuration.
A mover including a magnet part and a weight part, a frame that supports the mover slidably along a uniaxial direction, and a coil that is fixed to the frame and drives the magnet part along the uniaxial direction. An elastic member that imparts an elastic force repelling the driving force applied to the magnet portion to the mover, and a guide shaft that is arranged coaxially with the center of gravity axis of the mover and guides the vibration of the mover. And the frame includes a magnetic force attracting part for attracting the movable element in one direction around the guide shaft, and a sliding support part for slidingly supporting a part of the movable element. Vibration motor.
このような特徴を有する本発明のリニア振動モータは、可動子の形状によって薄型化を可能にし、扁平な断面形状の可動子にした場合にも、可動子の一部が摺動支持部を摺動しながら振動するので、可動子が振動軸周りに回転して作動音(異音)が発生するのを抑止することができ、がたつきの無い安定した振動を得ることができる。この際、一軸のガイドシャフトによって軸の平行調整を不要にできるので、高い組み付け精度を排除でき、生産性の向上を図ることができる。また、一軸のガイドシャフトにすることで、厚さ方向と幅方向のコンパクト化を実現することができる。 The linear vibration motor of the present invention having such a feature can be thinned by the shape of the mover, and even when the mover has a flat cross-sectional shape, a part of the mover slides the sliding support portion. Since it vibrates while moving, it is possible to prevent the moving element from rotating around the vibration axis to generate an operating noise (abnormal noise), and to obtain a stable vibration without rattling. At this time, since the parallel adjustment of the shaft can be made unnecessary by the single shaft, the high assembly accuracy can be eliminated and the productivity can be improved. Further, by using a uniaxial guide shaft, it is possible to achieve compactness in the thickness direction and the width direction.
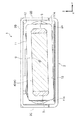
以下、図面を参照しながら本発明の実施形態を説明する(以下、異なる図における同一符号は同一部位を示しており、各図における重複説明は省略する。)。図1〜図3は、本発明の一実施形態に係るリニア振動モータの全体構成を示している。各図におけるX方向が振動方向(一軸方向)を示しており、Y方向が幅方向、Z方向が厚さ(高さ)方向を示している。 DESCRIPTION OF EMBODIMENTS Hereinafter, embodiments of the present invention will be described with reference to the drawings (hereinafter, the same reference numerals in different drawings indicate the same parts, and repeated descriptions in the respective drawings are omitted). 1 to 3 show the overall configuration of a linear vibration motor according to an embodiment of the present invention. The X direction in each figure indicates the vibration direction (uniaxial direction), the Y direction indicates the width direction, and the Z direction indicates the thickness (height) direction.
リニア振動モータ1は、マグネット部4と錘部7を備える可動子10と、可動子10を一軸方向に沿って摺動自在に支持する枠体2と、枠体2に固定されマグネット部4を一軸方向に沿って駆動するコイル3と、マグネット部4に付与される駆動力に反発する弾性力を可動子10に付与する弾性部材6とを備えている。
The
枠体2は、各部を収容することができる枠構成を有していればよいが、図示の例では、矩形状の底面2Aの周辺に立設される側壁2B,2C,2D,2Eを備えている。また、枠体2は、枠体2内の収容物を覆う蓋板2Qを備えている。蓋板2Qは側壁2B〜2Eの上端面に取り付けられる矩形板状に形成される。枠体2は、金属板を加工(プレス加工など)することで形成することができる。図示の例では、枠体2は、幅方向(図示Y方向)の寸法に対して、厚さ方向(図示Z方向)の寸法を小さく、振動方向(図示X方向)の寸法を大きくした薄厚状の略直方体形状(箱形形状)になっている。
The
リニア振動モータ1は、枠体2に固定されたコイル3と可動子10の一部であるマグネット部4によって駆動部が構成されている。枠体2に固定されたコイル3に、枠体2に設けた信号入力部2A1から振動発生電流を入力することで、マグネット部4に一軸方向(図示X方向)に沿ったローレンツ力(駆動力)が作用する。
In the
マグネット部4は、一軸方向(図示X方向)に沿った極性を有する偏平矩形状のマグネット片4A,4B,4Cを互いに同極が向き合うように複数配置して、スペーサヨーク4D,4Eを間に挟んで結合したものである。マグネット部4の側面には必要に応じて補強板5が固着されており、これによってマグネット部4の剛性を高めている。
The
コイル3は、磁極の向きをX方向に向けたマグネット部4の回りに、Y,Z方向に沿って電線を巻いたものであり、その上面と下面の一方又は両方、更には必要に応じて側面を、枠体2の内面に固定している。コイル3の枠体2への固定は、枠体2に直接固定してもよいし、コイル3をコイルボビンに巻いてコイルボビンを枠体2に固定してもよい。
The
可動子10は、図示の例では、錘部7がマグネット部4の一軸方向(図示X方向)両端部に連結されている。錘部7は、比重の高い金属材料(例えば、タングステン)などによって構成することができ、図示の例では、マグネット部4の厚さよりも大きいZ方向高さを有すると共にマグネット部4の幅より大きいY方向の幅を有する矩形断面形状を有している。錘部7は、連結部材11を介してマグネット部4に連結されている。
In the illustrated example, the
枠体2には、一対のガイドシャフト8が軸支されている。一対のガイドシャフト8は、一軸方向(図示X方向)に沿って分割配置されており、その一端側が錘部7に固定され、他端側が互いに逆向きに突出して自由端を形成している。このガイドシャフト8は、可動子10の重心軸と同軸に配置されており、可動子10の振動を一軸方向に沿って案内している。ここでは、ガイドシャフト8を分割配置しているが、ガイドシャフト8がマグネット部4を貫通して固定されたり、マグネット部4を貫通して摺動自在に支持されたものであってもよい。
A pair of
錘部7は、ガイドシャフト8を支持するためのガイドシャフト支持部7Bを備えている。ガイドシャフト支持部7Bは、錘部7の端部7Aから一軸方向に沿って凹んだ部分であり、このガイドシャフト支持部7Bに一端側が支持されたガイドシャフト8は、枠体2の底面2Aに支持部2Sを介して取り付けられた軸受9に、一軸方向(図示X方向)に沿って摺動自在に支持されている。この際、錘部7のガイドシャフト支持部7Bは、軸受9を収容するだけの幅を備えており、このガイドシャフト支持部7B内に軸受9が入り込むことで、可動子10の大きな振幅を確保している。
The weight portion 7 includes a guide shaft support portion 7 </ b> B for supporting the
枠体2は、可動子10をガイドシャフト8回りの一方向に磁力吸引する磁力吸引部(磁性板12)と、可動子10の一部を摺動支持する摺動支持部(非磁性摺動板13)を備えている。すなわち、枠体2自体は、非磁性体で形成されており、蓋板2Qの内面における図示Y方向の端に図示X方向に延びる磁性板12を配置することで磁力吸引部を形成しており、枠体2の底面(内面)2A上に、非磁性摺動板13を配置することで、摺動支持部を形成している。
The
磁性板12は、鉄板などで形成され、可動子10の重心軸Gから離れた位置に取り付けられている。また、非磁性摺動板13は、チタン,銅などの非磁性且つ高強度の母材に、クロムメッキなどの高硬度且つ高摺動(低摩擦)の表面被覆を施したものなどを用いることができる。
The
図示の例では、磁性板12によって磁力吸引部を形成し、非磁性摺動板13によって摺動支持部を形成しているが、それに限らず、蓋板2Qの内面に部分的に磁性体膜や磁性体フィルムを被着して磁力吸引部を形成してもよいし、底板2Aの一部に低摩擦・高強度被覆を施して摺動支持部にしてもよい。
In the illustrated example, the magnetic attraction portion is formed by the
図3に示すように、可動子10は、一軸方向(図示X方向)に交差する断面形状が長辺を備えている。具体的には、可動子10は、長辺と短辺を有する長方形の断面を有している。そして、枠体2は、その長辺に沿って対面する一対の内面(蓋板2Qの内面と底面2A)を備え、その内面の一方側(図示の例では、蓋板2Qの内面側)にマグネット部4を吸引する磁力吸引部(磁性板12)が設けられ、内面の他方側(底面2A側)に摺動支持部(非磁性摺動板13)が設けられている。
As shown in FIG. 3, the
マグネット部4と錘部7を連結している連結部材11は、マグネット部4及び錘部7に対して底面2A側に突出した形状を備えている。これによって、可動子10が重心軸Gと同軸上のガイドシャフト8回りに回転すると、連結部材11の一部が底面2A上の摺動支持部(非磁性摺動板13)に当接することになる。
The connecting
また、図示の例では、マグネット部4と錘部7の一軸方向(図示X方向)に交差する断面形状が、長辺(及び短辺)を備えており、連結部材11は、その一部(当接部11A)が摺動支持部(非磁性摺動板13)に当接した状態で、マグネット部4と錘部7の長辺が枠体2の内面(蓋板2Qの内面と底面2A)と略平行になるように、マグネット部4と錘部7とを連結している。
In the illustrated example, the cross-sectional shape that intersects the uniaxial direction (X direction in the drawing) of the
弾性部材6は、一軸方向に沿った一対のガイドシャフト8とは非同軸に配置され、コイル3とマグネット部4とによって生じる駆動力に反発する弾性力を、可動子10に付与している。図示の例では、弾性部材6として一軸方向(X方向)に沿って延び縮みするコイルバネを用いており、片側2個の弾性部材6を錘部7と枠体2の側壁2B,2Cの間に介在させている。図示の例では、弾性部材6は一対のガイドシャフト8と平行に配置されている。そして、弾性部材6の一端は枠体2の側壁2B,2Cに設けた支持突起2Pに係止されており、弾性部材6の他端は錘部7の端部7Aに設けた支持突起に係止されている。
The
このようなリニア振動モータ1の動作を説明する。非駆動時には、可動子10は弾性部材6の弾性力が釣り合う振動中心位置で静止している。そして、コイル3に、可動子10の質量と弾性部材6の弾性係数で決まる共振周波数の振動発生電流を入力すると、マグネット部4にX方向の駆動力が付与され、この駆動力と弾性部材6の弾性反発力によって可動子10が一軸方向(図示X方向)に沿って往復振動する。
The operation of such a
この際、可動子10の重心軸Gから離れた位置に配置されている磁性板12とマグネット部4との磁力吸引によって、可動子10には、重心軸Gと同軸のガイドシャフト8回りに一方向の回転力が付与され、可動子10の断面形状における長辺の端が蓋板2Q側に引き寄せられる。可動子10は、例えば、ガイドシャフト5に直交する断面形状が方形状になっている。
At this time, the
また、可動子10のマグネット部4と錘部7とを連結する連結部材11が、下方に突出する当接部11Aを備えているので、ガイドシャフト8回りの回転力によって、当接部11Aが底面2A上に設けた非磁性摺動板13上に当接することになり、非磁性摺動板13上に低摩擦で接触してその上を摺動することになる。この際、可動子10の上方は、蓋板2Qの内面とは非接触の状態になっている。
Further, since the connecting
これによると、可動子10は、ガイドシャフト8に沿った往復振動時に、磁性板12とマグネット部4との磁力吸引でガイドシャフト8回りの一方向に回転付勢され、可動子10の一部である当接部11Aが非磁性摺動板13上に常時当接した状態で摺動することになる。これによって、可動子10はがたつきが無く安定した動作をすることができ、振動時の動作音(異音)を低減したリニア振動モータ1を得ることができる。
According to this, the
このようなリニア振動モータ1によると、当接部11Aが摺動する非磁性摺動板13は、摺動摩耗の低減化がなされているので、リニア振動モータ1の高寿命化が可能になる。また、ガイドシャフト8回りに可動子10が回転した場合には、必ず当接部11Aが非磁性摺動板13上に当たることになり、可動子10が枠体2の他部分に接触するのを避けることができるので、衝撃時の変形抑制が可能になり、耐衝撃構造を有したリニア振動モータ1を得ることができる。また、非磁性摺動板13は、枠体2よりも高強度の母材で高硬度の表面被覆(表面処理)を施しているので、枠体2の材質に影響されること無く耐衝撃構造を向上させることができる。
According to such a
また、このリニア振動モータ1は、一対のガイドシャフト8が分割されていてマグネット部4を貫通しないので、一対のガイドシャフト8の直径とは無関係にY方向に幅広でZ方向には薄いマグネット部4によって、十分な駆動力が得られるマグネット体積を確保することができる。これによって十分な駆動力が得られる薄型のリニア振動モータ1を得ることができる。
Further, in this
更に、同軸上に配置した一対のガイドシャフト8で可動子10を軸支持するリニア振動モータ1は、マグネットの左右両サイドに振動方向に沿った一対の固定シャフトを設ける従来技術と比較すると、マグネット部4の左右には軸配置のスペースが不要になるので左右の幅をコンパクト化することが可能になる。
Furthermore, the
更には、弾性部材6を一対のガイドシャフト8に対して非同軸に配置しているので、弾性部材6の直径を一対のガイドシャフト8の直径とは無関係に細径化することができる。弾性部材6を細径化した場合の弾性力の設定は、弾性部材6の材料選択や弾性部材6を多数並列させることなどで適宜設定することができる。これによっても、可動子10を軸支持したリニア振動モータ1の薄型化が可能になる。
Furthermore, since the
図4は、本発明の実施形態に係るリニア振動モータ1の他の形態例を示している。この例は、一対のガイドシャフト8の一端側が枠体2に固定され、他端側が可動子10側に摺動自在に軸支されているが、その他の構成は前述した例と同様である。
FIG. 4 shows another example of the
一対のガイドシャフト8の一端側は、図示の例では、2点で枠体2に支持されている。具体的には、ガイドシャフト8の端部が枠体2の側壁2B,2Cに固定されており、更に、ガイドシャフト8の端部から離れたところで支持部2Sによって支持されている。
One end side of the pair of
可動子10には、ガイドシャフト8の自由端側(他端側)が挿入される孔7Cが一軸方向(図示X方向)に沿って設けられている。孔7C内には、ガイドシャフト8がX方向に摺動自在な軸受9を設けており、これによって、ガイドシャフト8の他端側は可動子10の軸受9に摺動自在に支持されている。可動子10に設けられる孔7Cは、可動子10の錘部7に設けており、可動子10のマグネット部4には孔を設けていない。
The
このようなリニア振動モータ1の錘部7は、直方体形状に形成することができ、その内部にガイドシャフト8が通る分だけの孔7Bを形成すればよいので、錘部7の体積を十分に大きくすることができる。これによって、振動の慣性力となる可動子10の質量を十分に確保することができる。
The weight portion 7 of such a
以上説明したように、本発明の実施形態に係るリニア振動モータ1は、可動子10の厚さ寸法を幅寸法より小さくすることで、リニア振動モータの薄型化を可能にすることができ、このように可動子10を扁平状にした場合にも、可動子10がガイドシャフト8周りに無闇に回転して作動音(異音)が発生するのを抑止することができる。これによって、がたつきの無い安定した振動を得ることができ、2軸の平行固定シャフトを設ける場合と比較して、生産性の向上を図ることができる。
As described above, the
また、一対のガイドシャフト8によって可動子10を軸支持して振動させることで、固定シャフトを設ける場合と同様に安定した振動を得ることができると共に落下衝撃時の耐損傷性を得ることができる。そして、このようなリニア振動モータ1において、マグネット部4や錘部7の体積減少を抑えた上で薄型化や幅方向のコンパクト化を達成することができる。
In addition, by supporting the
図5は、本発明の実施形態に係るリニア振動モータ1を装備した電子機器の一例として、携帯情報端末100を示している。安定した振動が得られ薄型化や幅方向のコンパクト化が可能なリニア振動モータ1を備える携帯情報端末100は、通信機能における着信やアラーム機能などの動作開始・終了時を異音が発生しにくい安定した振動で使用者に伝えることができる。また、リニア振動モータ1の薄型化・幅方向のコンパクト化によって高い携帯性或いはデザイン性を追求した携帯情報端末100を得ることができる。更に、リニア振動モータ1は、厚さを抑えた直方体形状の枠体2内に各部を収容したコンパクト形状であるから、薄型化された携帯情報端末100の内部にスペース効率よく装備することができる。
FIG. 5 shows a
以上、本発明の実施の形態について図面を参照して詳述してきたが、具体的な構成はこれらの実施の形態に限られるものではなく、本発明の要旨を逸脱しない範囲の設計の変更等があっても本発明に含まれる。また、上述の各実施の形態は、その目的及び構成等に特に矛盾や問題がない限り、互いの技術を流用して組み合わせることが可能である。 As described above, the embodiments of the present invention have been described in detail with reference to the drawings. However, the specific configuration is not limited to these embodiments, and the design can be changed without departing from the scope of the present invention. Is included in the present invention. In addition, the above-described embodiments can be combined by utilizing each other's technology as long as there is no particular contradiction or problem in the purpose and configuration.
1:リニア振動モータ,
2:枠体,2A:底面,2A1:信号入力部,
2B,2C,2D,2E:側壁,2S:支持部,
2P:支持突起,2Q:蓋板,
3:コイル,4:マグネット部,
4A,4B,4C:マグネット片,
4D,4E:スペーサヨーク,
5:補強板,6:弾性部材,
7:錘部,7A:端部,7B:ガイドシャフト支持部,7C:孔,
8:ガイドシャフト,9:軸受,10:可動子,
11:連結部材,11A:当接部,12:磁性板,13:非磁性摺動板,
100:携帯情報端末
1: Linear vibration motor,
2: frame, 2A: bottom, 2A1: signal input unit,
2B, 2C, 2D, 2E: side wall, 2S: support part,
2P: support protrusion, 2Q: lid plate,
3: Coil, 4: Magnet part,
4A, 4B, 4C: Magnet pieces,
4D, 4E: Spacer yoke,
5: Reinforcing plate, 6: Elastic member,
7: weight part, 7A: end part, 7B: guide shaft support part, 7C: hole,
8: guide shaft, 9: bearing, 10: mover,
11: connecting member, 11A: contact portion, 12: magnetic plate, 13: non-magnetic sliding plate,
100: Portable information terminal
Claims (7)
前記可動子を一軸方向に沿って摺動自在に支持する枠体と、
前記枠体に固定され前記マグネット部を前記一軸方向に沿って駆動するコイルと、
前記マグネット部に付与される駆動力に反発する弾性力を前記可動子に付与する弾性部材と、
前記可動子の重心軸と同軸に配置され、前記可動子の振動を案内するガイドシャフトとを備え、
前記枠体は、前記可動子を前記ガイドシャフト回りの一方向に磁力吸引する磁力吸引部と、前記可動子の一部を摺動支持する摺動支持部を備えることを特徴とするリニア振動モータ。 A mover including a magnet part and a weight part;
A frame that slidably supports the mover along a uniaxial direction;
A coil that is fixed to the frame and drives the magnet portion along the uniaxial direction;
An elastic member that imparts to the mover an elastic force that repels the driving force applied to the magnet portion;
A guide shaft that is arranged coaxially with the center of gravity axis of the mover and guides the vibration of the mover;
The frame includes a magnetic force attracting part for attracting the mover in one direction around the guide shaft and a sliding support part for slidingly supporting a part of the mover. .
前記枠体は、前記長辺に沿って対面する一対の内面を備え、
前記内面の一方側に前記マグネット部を吸引する前記磁力吸引部が設けられ、前記内面の他方側に前記摺動支持部が設けられることを特徴とする請求項1記載のリニア振動モータ。 The mover has a long side with a cross-sectional shape intersecting the uniaxial direction,
The frame includes a pair of inner surfaces facing along the long side,
The linear vibration motor according to claim 1, wherein the magnetic force attracting part that attracts the magnet part is provided on one side of the inner surface, and the sliding support part is provided on the other side of the inner surface.
前記磁力吸引部は、前記重心軸から離れた位置に取り付けられる磁性板であることを特徴とする請求項1又は2記載のリニア振動モータ。 The frame is a non-magnetic material,
The linear vibration motor according to claim 1, wherein the magnetic force attracting part is a magnetic plate attached at a position away from the center of gravity axis.
前記当接部が前記摺動支持部に当接した状態で、前記長辺が前記枠体の内面と略平行になることを特徴とする請求項5記載のリニア振動モータ。 The magnet part and the weight part have long sides in a cross-sectional shape intersecting the uniaxial direction,
The linear vibration motor according to claim 5, wherein the long side is substantially parallel to the inner surface of the frame body in a state where the contact portion is in contact with the sliding support portion.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015132762A JP2017017875A (en) | 2015-07-01 | 2015-07-01 | Linear vibration motor |
| CN201680022182.XA CN107534376B (en) | 2015-04-17 | 2016-04-13 | Linear vibration motor |
| PCT/JP2016/061947 WO2016167299A1 (en) | 2015-04-17 | 2016-04-13 | Linear vibration motor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015132762A JP2017017875A (en) | 2015-07-01 | 2015-07-01 | Linear vibration motor |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017017875A true JP2017017875A (en) | 2017-01-19 |
Family
ID=57831283
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015132762A Pending JP2017017875A (en) | 2015-04-17 | 2015-07-01 | Linear vibration motor |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017017875A (en) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10117472A (en) * | 1996-10-14 | 1998-05-06 | Matsushita Electric Ind Co Ltd | Vibration generator for portable equipment |
| JP2011030370A (en) * | 2009-07-27 | 2011-02-10 | Sanyo Electric Co Ltd | Vibrating motor |
| JP2011078150A (en) * | 2009-09-29 | 2011-04-14 | Nidec Sankyo Corp | Linear drive device and optical element drive device |
| JP2011097747A (en) * | 2009-10-29 | 2011-05-12 | Nidec Copal Corp | Vibration actuator |
| US20130099600A1 (en) * | 2011-10-24 | 2013-04-25 | Lg Innotek Co., Ltd. | Linear vibrator |
-
2015
- 2015-07-01 JP JP2015132762A patent/JP2017017875A/en active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10117472A (en) * | 1996-10-14 | 1998-05-06 | Matsushita Electric Ind Co Ltd | Vibration generator for portable equipment |
| JP2011030370A (en) * | 2009-07-27 | 2011-02-10 | Sanyo Electric Co Ltd | Vibrating motor |
| JP2011078150A (en) * | 2009-09-29 | 2011-04-14 | Nidec Sankyo Corp | Linear drive device and optical element drive device |
| JP2011097747A (en) * | 2009-10-29 | 2011-05-12 | Nidec Copal Corp | Vibration actuator |
| US20130099600A1 (en) * | 2011-10-24 | 2013-04-25 | Lg Innotek Co., Ltd. | Linear vibrator |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6421089B2 (en) | Linear vibration motor and portable electronic device including the linear vibration motor | |
| WO2017057314A1 (en) | Linear vibration motor | |
| WO2016017585A1 (en) | Linear vibration motor | |
| JP6591248B2 (en) | Linear vibration motor | |
| WO2016017586A1 (en) | Linear vibration motor | |
| WO2017002950A1 (en) | Linear vibration motor | |
| CN107107112B (en) | Linear vibration motor | |
| CN107847976B (en) | Linear vibration motor and mobile electronic device including the same | |
| WO2017051843A1 (en) | Linear vibration motor | |
| CN107534376B (en) | Linear vibration motor | |
| WO2017002949A1 (en) | Linear vibration motor | |
| JP2017212793A (en) | Linear vibration motor | |
| WO2018008280A1 (en) | Linear vibration motor | |
| WO2017057193A1 (en) | Linear vibration motor | |
| JP2017175838A (en) | Linear vibration motor | |
| JP2018046619A (en) | Linear vibration motor | |
| JP6479595B2 (en) | Linear vibration motor | |
| JP2017017875A (en) | Linear vibration motor | |
| JP2016208608A (en) | Linear vibration motor | |
| JP6479557B2 (en) | Linear vibration motor | |
| JP6453182B2 (en) | Linear vibration motor and portable electronic device including the linear vibration motor | |
| JP2022056733A (en) | Vibration actuator and electronic instrument | |
| JP2016131916A (en) | Linear vibration motor | |
| JP2019063693A (en) | Linear vibration motor | |
| JP2017208933A (en) | Linear vibration motor |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171114 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180828 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20190305 |