JP2017006826A - Fruit-vegetable automatic sorting method, fruit-vegetable automatic sorting apparatus, packing apparatus, fruit-vegetable sorting packing apparatus, and fruit-vegetable carrier - Google Patents
Fruit-vegetable automatic sorting method, fruit-vegetable automatic sorting apparatus, packing apparatus, fruit-vegetable sorting packing apparatus, and fruit-vegetable carrier Download PDFInfo
- Publication number
- JP2017006826A JP2017006826A JP2015123096A JP2015123096A JP2017006826A JP 2017006826 A JP2017006826 A JP 2017006826A JP 2015123096 A JP2015123096 A JP 2015123096A JP 2015123096 A JP2015123096 A JP 2015123096A JP 2017006826 A JP2017006826 A JP 2017006826A
- Authority
- JP
- Japan
- Prior art keywords
- fruit
- vegetables
- vegetable
- pack
- fruit vegetable
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images








Abstract
Description
本発明は、果菜をその搬送中に計測して等階級判別し、判別された果菜を等階級別に仕分ける果菜自動選別方法及び果菜自動選別装置と、仕分けした果菜をパック詰めするパック詰め装置と、果菜選別パック詰め装置と、これら装置に用いることのできる果菜キャリアに関する。 The present invention is a fruit vegetable automatic sorting method and fruit vegetable automatic sorting device for measuring fruit vegetables during their transport and classifying the identified fruit vegetables according to equal classes, and a packing device for packing the sorted fruit vegetables, The present invention relates to a fruit vegetable sorting and packing apparatus, and a fruit vegetable carrier that can be used in these apparatuses.
果菜を計測し、等階級を判別し、判別した等階級別に仕分けるための果菜自動選別装置として、本件発明者が先に開発したベルトコンベア式の果菜キャリアが搭載された果菜自動選別装置(例えば、特許文献1〜3)がある。 As an automatic fruit vegetable sorting device for measuring fruit vegetables, discriminating the equal classes, and sorting by the identified equal classes, an automatic fruit vegetable sorting apparatus equipped with a belt conveyor type fruit vegetable carrier previously developed by the present inventors (for example, There are patent documents 1 to 3).
特許文献1、2に開示された果菜自動選別装置は、無端走行体(例えば、無端走行チェーン)にベルトコンベア式の果菜キャリアを多数取り付けて、無端走行チェーンが循環走行すると果菜キャリアが循環移動する果菜搬送体としてある。この果菜搬送体は、作業員が手作業で果菜キャリアに果菜を一個ずつ載せる果菜供給部(果菜載せエリア)と、果菜キャリアに載せた果菜の形状、大きさ(サイズ)等を計測して予め定めてある等階級に判別する計測・判別部(計測判別エリア)と、等階級判別された果菜を等階級ごとに仕分けして果菜搬送ラインの側方に設けられているプールコンベアに送り出す仕分け部(仕分けエリア)を備えている。
In the fruit vegetable automatic sorting apparatus disclosed in
特許文献1の果菜自動選別装置は、果菜キャリアのベルトの果菜載せ部に載せてある果菜を、ベルトの往回転(プールコンベア側への回転)により果菜搬送体の搬送方向側方のプールコンベアの上に送り出し、その後、無端走行チェーンの走行により、果菜キャリアが果菜載せエリアに戻るまでの間に、果菜キャリアのベルトが復回転(戻り回転)して、前記果菜載せ部が一列又は略一列に揃うようにしてある。 In the fruit vegetable automatic sorting apparatus of Patent Document 1, the fruit vegetables loaded on the fruit carrier loading part of the fruit carrier carrier belt are moved by the forward rotation of the belt (rotation to the pool conveyor side) of the pool conveyor on the side of the fruit conveyer conveying direction. The belt of the fruit vegetable carrier is rotated backward (returned) until the fruit carrier returns to the fruit vegetable loading area by running the endless running chain, and the fruit vegetable loading parts are arranged in a row or substantially in a row. They are all aligned.
特許文献1記載の果菜キャリアは、果菜搬送中に、果菜キャリアのベルトの往回転によって、ベルトに載せてある果菜を、搬送方向側方のプールコンベア側に送り出すので、搬送方向に慣性のついている果菜が果菜の送り出し時に転がったり、倒れたりして、傷付くことがあった。これら問題を解決するため、特許文献2の果菜自動選別装置は、ベルトの上方に果菜を後方から支持できる支持体を突設したベルトコンベア式の果菜キャリアである。
The fruit vegetable carrier described in Patent Document 1 has an inertia in the conveyance direction because the fruit vegetables loaded on the belt are sent to the pool conveyor side on the side in the conveyance direction by the forward rotation of the belt of the fruit vegetable carrier during the conveyance of the fruit vegetables. Fruits and vegetables were hurt by rolling or falling when they were sent out. In order to solve these problems, the automatic vegetable vegetable sorting apparatus of
前記慣性の問題を解決するものとして、ベルトを搬送方向斜め後方に回転させて、ベルトの果菜載せ部の上の果菜を斜め後方に送り出す斜めバック式の果菜キャリアもある(特許文献3)。特許文献3の果菜キャリアは、一つのフレームに幅細ベルト(横幅1〜2cm程度)を複数本回転自在に巻回してあり、この果菜キャリアを斜め後方に向けて無端チェーンに一列に多数取付けて、前記幅細ベルトの回転により果菜を搬送方向斜め後方に送り出して、果菜の搬送方向への慣性を減少させるものであり、果菜が転倒しにくくなり、果菜の傷付きを防止できるという利点がある。 As a solution to the problem of inertia, there is also an oblique back-type fruit carrier that rotates the belt obliquely backward in the conveying direction and sends the fruit vegetables on the fruit vegetable mounting portion obliquely backward (Patent Document 3). The vegetable carrier disclosed in Patent Document 3 has a plurality of narrow belts (about 1 to 2 cm in width) wound around one frame so as to be freely rotatable. , The rotation of the narrow belt sends out the fruit vegetables obliquely backward in the conveying direction to reduce the inertia of the fruit vegetables in the conveying direction, and the fruit vegetables are less likely to fall down and have the advantage of preventing damage to the fruit vegetables .
前記ベルトコンベア式の果菜キャリアを搭載した果菜自動選別装置は、トマトや桃のように傷付きやすく、作業者が手作業で果菜キャリアに載せる必要があるような果菜を扱う場合に特に適した装置であるが、ミニトマトやキンカンのように、作業者が手作業で果菜キャリアに一個ずつ載せにくい小さな果菜を扱うには、あまり適さない。 The fruit vegetable automatic sorting device equipped with the belt conveyor type fruit vegetable carrier is particularly suitable for handling fruit vegetables that are easily damaged such as tomatoes and peaches and need to be manually placed on the fruit carrier by the operator. However, it is not very suitable for handling small fruit vegetables such as cherry tomatoes and kumquats, which are difficult for an operator to place on a vegetable carrier by hand.
本発明は、ミニトマトやキンカンのようにサイズが小さい果菜、桃や大玉トマトのように転がり易い球形(丸形)の果菜を、駆動機構の少ない簡潔な構成の装置で選別、パック詰めできるようにすることにある。 The present invention enables selection and packing of small-sized fruit vegetables such as cherry tomatoes and kumquats, and spherical (round) fruit vegetables that are easy to roll, such as peaches and large tomatoes, with an apparatus having a simple configuration with few drive mechanisms. Is to make it.
[果菜自動選別方法]
本発明の果菜自動選別方法は、多数の果菜を不規則に搬送して、下り傾斜の移送体に送り出し、下り傾斜により移送体を移動中の果菜を一列に揃え、揃えた果菜を一個ずつ取り出して一個ずつ離して搬送し、搬送中の個々の果菜を自動的に計測して等階級を判別し、判別済み果菜を等階級別に果菜搬送方向側方に送り出して果菜を仕分け(選別)する方法である。
[Fruit vegetables automatic selection method]
The method for automatically sorting fruit vegetables of the present invention transports a large number of fruit vegetables irregularly, sends them to a downwardly inclined transport body, aligns the fruits and vegetables that are moving by the downward slope, and takes out the aligned fruit vegetables one by one. A method of sorting and sorting fruits and vegetables by feeding them one by one, automatically measuring each fruit vegetable being conveyed to determine the equal class, and sending the identified fruit vegetables to the side of the fruit vegetable conveyance direction by equal class. It is.
前記果菜自動選別方法では、等階級判別された果菜を、果菜搬送方向側方に配置されたプールコンベアに直に又は中継体を介して送り出すこともできる。 In the fruit vegetable automatic selection method, the fruit vegetables determined in the same class can be sent out directly or via a relay body to a pool conveyor arranged on the side of the fruit vegetables conveying direction.
前記果菜自動選別方法では、搬送中の等階級判別済み果菜にエアを吹き付けて、果菜を搬送方向側方又は同側方のプールコンベアに送り出すこともできる。 In the fruit vegetable automatic sorting method, air can be blown to the fruit that has been classified in the same class during conveyance, and the fruit vegetables can be sent to the side of the conveyance direction or to the pool conveyor on the same side.
[果菜自動選別装置]
本発明の果菜自動選別装置は、下り傾斜の移送体と、当該移送体をその下り傾斜により移動する果菜を一個ずつ取り出して搬送する取出し搬送体を備えている。取出し搬送体は引継ぎ突起又は引継ぎ突起を備えた果菜キャリアを無端走行体に間隔をあけて取り付けたものである。引継ぎ突起は無端走行体の走行に伴って移動して移送体上の果菜を一個ずつ取り出して引き継ぐことができるものである。
[Fruit vegetables automatic sorting device]
The fruit vegetable automatic sorting apparatus of the present invention includes a downwardly inclined transfer body and an extraction transport body that extracts and transports the fruit and vegetables that move the transfer body by the downward inclination one by one. The take-out transport body is obtained by attaching a takeover protrusion or a fruit and vegetable carrier provided with a takeover protrusion to the endless traveling body with a gap. The take-up protrusion moves along with the running of the endless running body, and can take out the fruits and vegetables on the transfer body one by one and take over.
本発明の果菜自動選別装置では、取出し搬送体から等階級別に送り出される多数の果菜をプールできるプールコンベアを、果菜搬送方向側方に配置することもできる。 In the fruit vegetable automatic sorting apparatus of the present invention, a pool conveyor capable of pooling a large number of fruit vegetables sent out by equal class from the take-out conveyance body can also be arranged on the side of the fruit vegetable conveyance direction.
取出し搬送体の側方に、取出し搬送体で搬送中の果菜にエアを吹き付けて当該果菜を搬送方向側方に送り出すエア噴出機を設けることができる。 An air blower can be provided on the side of the take-out conveyance body to blow air on the fruit vegetables being conveyed by the take-out conveyance body and to send the fruit vegetables to the side in the conveyance direction.
前記移送体は数本の細長材を、間隔をあけて配置して形成し、その間隔を前記引継ぎ突起が下方から上方に通過できる通過空間とすることができる。 The transfer body is formed by arranging a plurality of elongated materials at intervals, and the interval can be used as a passing space through which the takeover projection can pass from below to above.
[パック詰め装置]
本発明のパック詰め装置は、果菜自動選別装置から送り出される果菜を引き継ぐパック用引継ぎ体と、果菜を一列に整列させる複数列のパック用整列体と、各列のパック用整列体で一列に整列されて移動中の果菜を一個ずつ取出して搬送する数列のパック用搬送体と、数列のパック用搬送体の先方に設けられたホッパーと、ホッパーの下に空パックを移送するパック移送体を備えたものである。パック用搬送体は列別に移動して夫々のパック用搬送体の果菜を搬送してホッパーに投入できるようにしてある。果菜を送り出すパック用搬送体の列数を制御することにより、ホッパーに送りされる果菜の個数又は重量(以下「数量」という。)を制御することができる。
[Packing device]
The pack packing device of the present invention is arranged in a row by a pack takeover body that takes over the fruit and vegetables delivered from the fruit and vegetable automatic sorting device, a plurality of pack alignment bodies that align the fruit vegetables in a row, and a pack alignment body in each row. A plurality of pack transport bodies for taking out and transporting the moving fruits one by one, a hopper provided at the front of the several pack transport bodies, and a pack transport body for transporting an empty pack under the hopper It is a thing. The pack transporters are moved by row so that the fruits and vegetables of each pack transporter can be transported and put into the hopper. By controlling the number of pack transporters that deliver fruit vegetables, the number or weight (hereinafter referred to as “quantity”) of the fruit vegetables sent to the hopper can be controlled.
パック用搬送体は、無端走行体の走行方向に引継ぎ突起又は引継ぎ突起を備えた果菜キャリアを走行方向に間隔をあけて取り付けたものとすることができる。 The transport body for packs may have a take-up projection or a vegetable carrier provided with a take-up projection in the running direction of the endless running body with an interval in the running direction.
前記パック用整列体の各列は、パック用搬送体の引継ぎ突起が下方から上方へ通過して夫々のパック用整列体内の果菜を個別に取り上げる通過空間を備えたものとする。 Each row of the pack alignment bodies is provided with a passing space in which the take-up projections of the pack transport bodies pass from below to above and pick up the fruits and vegetables in the respective pack alignment bodies individually.
[果菜選別パック詰め装置]
本発明の果菜選別パック詰め装置は、前記果菜自動選別装置のプールコンベアの先方にパック詰め装置を備え、果菜自動選別装置は前記果菜自動選別装置であり、パック詰め装置は前記パック詰め装置であり、前記プールコンベアから送り出される選別済み果菜を前記パック詰め装置で数列に整列させ、各列の果菜をホッパーに送り出し、ホッパーの下にパック移送体を備え、パック移送体でホッパーの下に搬入された空パックに、ホッパー内の果菜を投入してパック詰めし、充填済みパックを前記パック移送体でホッパーの下から排出できるようにしたものである。
[Fruit vegetables sorting and packing equipment]
The fruit vegetable sorting and packing apparatus according to the present invention includes a packing device at the end of the pool conveyor of the fruit and vegetables automatic sorting device, the fruit and vegetable automatic sorting device is the fruit and vegetables automatic sorting device, and the packing and packaging device is the packing device. The sorted fruit vegetables sent out from the pool conveyor are arranged in several rows by the packing device, each row of fruit vegetables is sent to the hopper, a pack transporter is provided under the hopper, and the pack transporter is carried under the hopper. In addition, fruit vegetables in the hopper are put into an empty pack and packed, and the filled pack can be discharged from under the hopper by the pack transfer body.
[果菜キャリア]
本発明の果菜キャリアは一列に整列されて送り込まれる果菜を一個ずつ取り出すことができるものであり、コンベア式の無端走行体に取り付けることができるものであり、果菜を取り出す引継ぎ突起と、取り出した果菜を載せる果菜載せ部を備え、引継ぎ突起は果菜を一列に整列して搬送する移送体又はパック用整列体の通過空間を通過して、移送体又はパック用整列体から果菜を取り出すことができるものであり、果菜載せ部は引継ぎ突起で取出した果菜を支持できるものである。
[Fruit vegetable carrier]
The vegetable carrier of the present invention is one that can take out the fruits and vegetables that are sent in a line, and can be attached to a conveyor-type endless traveling body. The take-up projections can pass through the passage space of the transfer body or pack alignment body that transports the fruit vegetables in a row, and the fruit vegetables can be taken out from the transfer body or the pack alignment body. The fruit vegetable mounting part can support the fruit vegetables taken out by the takeover protrusion.
本発明の果菜自動選別方法は、次の効果を奏する。
(1)移送体の上の果菜を一個ずつ取り出して引き継ぐため、個々の果菜の自動計測が確実にできる。
(2)移送体が下り傾斜であり、その下り傾斜で、果菜を自動的に移動させるため、果菜の移動にコンベアやそれを駆動する装置が不要であり、構成が簡潔で故障しにくく、メンテナンスも容易である。
(3)取出し搬送体で搬送中の果菜を、エアの吹付けによって送り出す場合、従前のベルトコンベア式の果菜キャリアよりも構造が簡潔で故障しにくく、メンテナンスも容易である。
The fruit vegetable automatic selection method of the present invention has the following effects.
(1) Since the fruit vegetables on the transfer body are taken out one by one and taken over, automatic measurement of individual fruit vegetables can be ensured.
(2) Since the transporting body is downwardly inclined and the fruit and vegetables are moved automatically with the downward inclination, the conveyor and the device for driving it are not necessary for the movement of the fruit and vegetables. Is also easy.
(3) When the fruit vegetables being conveyed by the take-out conveyance body are sent out by blowing air, the structure is simpler and less likely to break down than the conventional belt conveyor type fruit vegetable carrier, and maintenance is easy.
本発明の果菜自動選別装置は、次の効果を奏する。
(1)移送体を移動した果菜を、引継ぎ突起で一個ずつ取り出して引き継ぐため、果菜を確実に引き継ぐことができる。
(2)移送体を下り傾斜にして、果菜が自動的に移動できるようにしてあるため、果菜の移動にコンベアやそれを駆動する装置が不要であり、構成が簡潔で故障しにくく、メンテナンスも容易である。
The fruit vegetable automatic sorting apparatus of the present invention has the following effects.
(1) Since the fruits and vegetables that have moved the transfer body are taken out one by one by the take-up protrusion and inherited, the fruits and vegetables can be reliably inherited.
(2) Since the transporting body is inclined downward so that the fruit vegetables can move automatically, the conveyor and the device for driving it are not necessary for the movement of the fruit vegetables, the structure is simple, and it is difficult to break down, and maintenance is also possible. Easy.
本発明のパック詰め装置は、次の効果を奏する。
(1)等階級判別された果菜を自動的にパック詰めできるので、パック詰め作業員が不要となり、大幅な省力化できる。
(2)果菜を複数列に区画された通路内を移動させてホッパーに所定数量ためてから、ホッパーから空パックに果菜を詰めるので、空パックに一定(略一定を含む)数量の果菜を詰めることができ、数量のばらつきがない。果菜の個数或いは重さを調整し易くなる。
The packing device of the present invention has the following effects.
(1) Since the fruits and vegetables identified in the same class can be automatically packed, a packing operator is not required, and the labor can be greatly saved.
(2) Since the fruit vegetables are moved through the passages divided into a plurality of rows to accumulate a predetermined amount in the hopper, the fruit vegetables are packed from the hopper into the empty pack, and therefore, the empty pack is packed with a certain amount (including substantially constant) of the fruit vegetables. And there is no variation in quantity. It becomes easy to adjust the number or weight of fruit vegetables.
本発明の果菜選別パック詰め装置は、次の効果を奏する。
(1)果菜の等階級判別ごとの選別からパック詰めまでを、全自動化できるので、大幅な省力化ができる。
The fruit vegetable sorting and packing apparatus of the present invention has the following effects.
(1) Since the process from sorting to packing of fruit vegetables for each class classification can be fully automated, significant labor savings can be achieved.
本発明の果菜キャリアは、次の効果を奏する。
(1)簡潔な構造であるため、故障しにくく、メンテナンスも容易である。
(2)無端走行体に取付けやすい。
The fruit vegetable carrier of the present invention has the following effects.
(1) Since it has a simple structure, it is hard to break down and is easy to maintain.
(2) Easy to attach to an endless traveling body.
(果菜自動選別方法の実施形態)
本発明の果菜自動選別方法は各種果菜の自動選別に利用することができるが、ミニトマトやキンカン、かぼす、栗、ミカン、茄子といった外形が球状或いは丸形(以下「丸形」という。)であり、傷付きにくい果菜の自動選別に適するものである。以下に、丸形果菜を自動選別する場合を一例として以下に説明する。
(Embodiment of fruit vegetable automatic selection method)
The fruit vegetable automatic selection method of the present invention can be used for automatic selection of various fruit vegetables, but the outer shape such as cherry tomato, kumquat, pumpkin, chestnut, mandarin orange and eggplant is spherical or round (hereinafter referred to as “round”). It is suitable for automatic selection of fruit vegetables that are not easily damaged. Below, the case where a round fruit vegetable is selected automatically is demonstrated as an example below.
本発明の果菜自動選別方法は次のようにして選別する方法である。
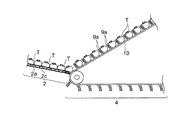
(1)コンテナC(図1、図2(a))から果菜Tを、果菜搬送体1(図1)の上に不規則に供給する。果菜搬送体1にはベルトコンベアその他の各種コンベアが適する。
(2)果菜搬送体1によりその上の果菜Tを搬送して移送体2に送る。
(3)移送体2は果菜Tを一列に並べながら出口側O(図1)に移動させる。移送体2は下り傾斜の通路であり、果菜Tが転がり落ちたり滑り落ちたりすることのできる角度の下り傾斜である。
(4)移送体2の出口側O(図1)において、果菜Tを取出し搬送体4(図1)により一個ずつ取り出して引き継いで搬送する。取出し搬送体4は例えば、ベルトコンベアに引継ぎ突起9aを取り付けたものが適する。
(5)取出し搬送体4で引き継いで搬送中の果菜Tの形状、大きさ、重さ、糖度、色、変形、傷等の必要事項を、取出し搬送体4の上方に配置した計測器5(図1)で自動的に計測する。
(6)前記計測データに基づいて、果菜Tの等階級を判別手段で判別する。判別手段にはこの種の果菜の自動選別において汎用されている判別手段を使用することができる。
(7)等階級判別済み果菜Tを、送り体6(図1)により、取出し搬送体体4の側方に配置されているプールコンベア7(図1)に等階級別に送り出して仕分ける(選別する)。送り体6にはエア噴出機や押し出し機等を使用することができる。プールコンベア7にはベルトコンベアを使用することができる。この場合、プールコンベア7の上に直に又は取出し搬送体4とプールコンベア7の間に配置した中継体、例えばプールコンベア7とは回転速度の異なるベルトコンベア或いは、回転方向の向きが異なるベルトコンベア等(図示せず)を介してプールコンベア7に送り出すことができる。
The fruit vegetable automatic sorting method of the present invention is a method for sorting as follows.
(1) Fruit vegetables T are irregularly supplied from the container C (FIG. 1, FIG. 2 (a)) onto the fruit vegetable carrier 1 (FIG. 1). A belt conveyor and other various conveyors are suitable for the fruit vegetable carrier 1.
(2) The fruit vegetables T are conveyed by the fruit vegetable carrier 1 and sent to the
(3) The
(4) At the outlet side O (FIG. 1) of the
(5) A measuring
(6) Based on the measurement data, the equal class of the fruit vegetables T is discriminated by the discriminating means. As the discriminating means, discriminating means widely used in automatic selection of this kind of fruit vegetables can be used.
(7) The fruit class T that has been identified in the same class is sent out to the pool conveyor 7 (FIG. 1) arranged on the side of the take-out
図1に示すプールコンベア7はベルトコンベア式であり、果菜Tが等階級別に送り出される箇所に配置する。図1では一つの等階級の送り出し箇所に三本配置されている。 The pool conveyor 7 shown in FIG. 1 is a belt conveyor type, and is arranged at a location where fruit vegetables T are sent out by class. In FIG. 1, three are arranged at one iso-class delivery point.
(果菜自動選別装置の実施形態1)
本発明の果菜自動選別装置の一例を図面に基づいて説明する。図1に示した果菜自動選別装置15は、コンテナCから投入された果菜Tを搬送する果菜搬送体1と、果菜搬送体1から送り込まれる果菜Tを一列に整列させて移動する移送体2と、移送体2の出口側Oにおいて移送体2から果菜Tを一個ずつ取り出して引き継ぐ取出し搬送体4と、搬送中の果菜Tの形状、大きさ、重さ、糖度、色、変形、傷等の必要事項を計測する計測器5と、判別済み果菜Tを取出し搬送体4の側方に送り出す送り体6(図1)と、送り体6により取出し搬送体4から送り出される果菜Tを多数プールするプールコンベア7を備えている。
(Embodiment 1 of an automatic fruit vegetable sorting apparatus)
An example of the fruit vegetable automatic sorting apparatus of the present invention will be described with reference to the drawings. The fruit vegetable
[果菜搬送体]
前記果菜搬送体1には図1、図2(a)に示すようにベルトコンベアを使用することができる。この場合、ベルトコンベアの上に二枚のガイド板8を対向配置し、両ガイド板8の間隔を出口側に向けて狭くして、両ガイド板8の間を通過する果菜Tが、移動するにつれて自動的に一列に整列するようにしてある。
[Fruit vegetable carrier]
A belt conveyor can be used for the fruit vegetable carrier 1 as shown in FIG. 1 and FIG. In this case, two guide plates 8 are arranged opposite to each other on the belt conveyor, the interval between the two guide plates 8 is narrowed toward the outlet side, and the fruit vegetables T passing between the two guide plates 8 move. As a result, they are automatically arranged in a line.
[移送体]
移送体2は図2(c)、図3(a)に示すように三本の細長棒或いは細長パイプ(以下「バー」という。)2a〜2cを三角形の頂点位置に前下がり傾斜に配置して、三本のバー2a〜2cの内側に移送通路Rを形成してあり、前記下り傾斜により前記移送通路R内を転がり落ちたり、滑り落ちたりして、移送体2の出口側O(図1)に移動するようにしてある。
[Transport body]
As shown in FIG. 2 (c) and FIG. 3 (a), the
図3(a)に示すように、バー2aと2c、バー2bと2cは間隔L1をあけて配置され、バー2aと2bは間隔L2をあけて配置されており、それら三本のバー2a〜2cの端面を仮想直線で繋いだときに、当該仮想直線が上向き開口の逆三角形となるようにしてある。前記間隔L1は果菜Tが通過しない(落下しない)広さとしてあり、上側に配置された二本の上側バー2a、2bの間隔L2は果菜Tの外径よりもやや大きくして果菜Tが一つ支持される広さの移送通路R(図2(c)、図6(a)(b))としてある。三本のバー2a〜2cは図示しないフレーム部材に取り付けられて前記位置関係が保持されている。前記間隔(空間)L1、L2の部分は通過空間Sである。バーは移送通路Rに果菜Tを支持でき、果菜Tを移送することができれば、本数、傾斜角度任意に設計することができる。図6(b)に四本の場合を例示する。この場合もバーの間に通過空間S(図3(b))がある。この通過空間Sは図6(a)(b)に示すように、取出し搬送体4の無端搬送体10に取り付けられている引継ぎ突起9aが通過して果菜Tを掬い上げる空間である。
As shown in FIG. 3 (a), the
前記移送体2は前記構造以外であってもよい。例えば、上向き開口の半割パイプを使用することができる。この場合は、半割パイプの横幅を少なくとも果菜Tが一つ収まる広さにして移送通路とする。半割パイプ場合はバーで移送体2を構成する場合と異なり空間がないため、半割パイプの終端側に引継ぎ突起9aが通過できる広さと数の切欠き部(孔、溝等)を開口して、当該切欠き部を引継ぎ突起9aが通過できる通過空間とすることができる。
The
移送体2の傾斜角度(下り勾配)は果菜Tが、入口側Q(図1の左側)から出口側O(図1の右側)に自動的に転がり落ちたり(転落したり)、滑り落ちたり(滑落したり)して出口側Oへ移動する程度の角度が適する。果菜Tには転がりにくい形状のものも、転がり易い形状のものもある。移送体2の下り勾配が小さ過ぎるとスムースに転がらずに移送体2の途中で停止してしまうおそれがある。下り勾配が大き過ぎると後続の果菜(本願において「後続果菜」という。)Tが前の果菜Tに追突したりを乗り越えたりして、果菜Tが損傷したりすることがある。そのような事態が生じない程度の下り勾配に設定するのが望ましい。また、果菜Tは形状や大きさが同じものは二つとしてないため果菜Tの種類や大きさ、形状等に応じて、スムースに転落或いは滑落する下り勾配に設計するのが望ましい。
The inclination angle (downhill) of the
[取出し搬送体]
取出し搬送体4は移送体2の出口側Oに到来した果菜Tを引き継いで先方に搬送するものである。取出し搬送体4としては例えば図2(a)〜(c)に示すように、タイミングベルト等の無端搬送体10に果菜キャリア9を取り付けたものを使用することができる。果菜キャリア9には図4(a)(b)に示す構造のものを使用することにより、移送体2の出口側Oにおいて、図2(c)のように果菜Tを果菜キャリア9の二枚の引継ぎ突起9aで掬い上げて(取り出して)、図2(b)のように、夫々の果菜キャリア9の果菜載せ部9bに一個ずつ載せて前記引継ぎ突起9aで区画することができるようにしてある。
[Take-out carrier]
The take-out
前記無端走行体10は間隔をあけて配置された五つのタイミングプーリー(図2(a))の外周に周回されて、上り傾斜部10aと、その先方の上水平走行部10bと、その先の下り傾斜部10cと、その先の斜め下向きに折り返す戻り傾斜部10dと、その先の下水平走行部10eが一連(無端状)になって回転する水平折り返し回転式である。無端走行体10には平ベルト式のベルトコンベアを使用することもできる。
The endless traveling
前記果菜キャリア9は無端走行体10の表面に、その走行方向に一定間隔で多数設けられており、当該無端走行体10の走行に伴って移動するようにしてある。
A large number of the
図1に示すように、多数の果菜キャリア9は一列(ほぼ一列を含む)に並べて無端走行体10に取り付けられている。一列に並べることで果菜Tが一列に一定間隔で搬送されるため、個々の果菜Tを計測器5で高精度に測定することができる。
As shown in FIG. 1, a large number of
個々の果菜キャリア9は図4(a)(b)に示すように、移送体2から果菜Tを引き継ぐ引継ぎ突起9aと、引継ぎ突起9aで取り出した果菜Tを載せる果菜載せ部9bを備えている。引継ぎ突起9aは果菜載せ部9bの後方側(無端走行体10に取り付けた場合の当該無端走行体10の走行方向後方)に設けられている。図4(a)(b)では二枚の引継ぎ突起9aを備えている。二枚の引継ぎ突起9aの間隔は果菜Tが落下しない広さとしてある。図4(a)の二枚の引継ぎ突起9aは搬送方向正面に向けて平行に配置されているが、図4(b)の引継ぎ突起9aは二枚が搬送方向正面よりも多少内向きに配置されている。
As shown in FIGS. 4 (a) and 4 (b), each
個々の引継ぎ突起9aの幅は移送体2の通過空間S(図6(a)(b))内を通過できる寸法としてあり、無端走行体10の走行に伴って、引継ぎ突起9aが通過空間S内を下方から上方に回転走行(通過)して、移送体2の上の果菜Tを一個ずつ掬い上げて取り出し、引継ぎ突起9aの先方の果菜載せ部9bの上に引き継ぐことができるようにしてある。
The width of each
引継ぎ突起9aの長さは果菜Tの高さよりも短くして、通過空間S内を下方から上方に通過するときに、移送体2の上の二以上の果菜Tに跨らないようにして、一度に二以上の果菜Tを掬い上げることができないようにしてある。
The length of the take-up
図4(a)(b)の果菜キャリア9は引継ぎ突起9aと果菜載せ部9bを樹脂で一体成形してあるが、別々に製作したものを組み合わせることもできる。材質は樹脂以外であってもよく、弾力性のあるシリコン、ゴム等であってもよい。引継ぎ突起9aは掬い上げた果菜が安定するように、長手方向(上下方向)中央部を多少外側に突出させて湾曲しておくとか、掬い上げるときに果菜Tの重さで多少屈曲可能なものであってもよい。
The
[計測器]
計測器5(図1)は、果菜Tの形状、大きさ、重さ、色、糖度、表面の凹凸、傷の有無等を計測するものであり、果菜自動選別に使用されている既存の光学式計測器、画像処理式計測器、糖度計、計量器といった各種方式の計測器を個別に又は二以上の計測器を組み合わせて使用することができる。計測器5は取出し搬送体4の上方に配置して、搬送中の果菜Tを上方から計測できるようにすることも、取出し搬送体4の側方に配置して側方から計測できるようにすることも、取出し搬送体4の真下に配置して下方から計測できるようにすることもできる。計測器5は果菜Tを正確に計測できる位置に配置する。
[Measuring instrument]
The measuring instrument 5 (FIG. 1) measures the shape, size, weight, color, sugar content, surface irregularities, presence / absence of scratches, etc. of the fruit vegetables T, and is an existing optical system used for fruit vegetable automatic selection. Various types of measuring instruments such as a type measuring instrument, an image processing type measuring instrument, a sugar meter, and a measuring instrument can be used individually or in combination of two or more measuring instruments. The measuring
[送り体]
前記送り体6(図1)は、判別済み果菜Tを取出し搬送体4の側方に配置されているプールコンベア7(図1)に等階級別に送り出すものである。一例として図1に示す送り体6は、高圧エアを噴出して取出し搬送体4の上の果菜Tをプールコンベア7に送り出すものである。送り体6としてはエア噴出機や押し出し機等を使用することができる。送り体6は計測器5側から送信される判別信号に従って動作するようにしてあり、判別済み果菜Tが、所定の等階級の果菜Tを引き受けるプールコンベア7の近傍に到達したときに、エアを噴出するように制御される。送り体6がエア噴出式である場合、取出し搬送体4の果菜キャリア9の真横のほか、取出し搬送体4による搬送方向斜め前方或いは斜め後方からエアを噴出して、噴出方向先方に送り出すこともできる。この場合は、プールコンベア7を吹き出し方向に配置しておく。
[Feeding body]
The feeding body 6 (FIG. 1) takes out the identified fruit vegetables T and feeds them to the pool conveyor 7 (FIG. 1) arranged on the side of the
[プールコンベア]
プールコンベア7(図1)は、送り体6により送り出される果菜Tを等階級別にプールするものであり、平ベルトを使用したベルトコンベア式とすることができる。プールコンベア7は取出し搬送体4の側方であって、等階級別にプールする箇所に数本ずつ配置されている。図1ではプールコンベア7を三本設けた場合を一例としているが、プールコンベア7は一つの等階級用に三本未満とすることも四本以上とすることもできる。プールコンベア7を多数本設ける場合は、数本おきに或いは一本おきに間隔をあけて配置して、その間隔(スペース)を、作業者が作業をするための作業スペースとして利用することもできる。
[Pool conveyor]
The pool conveyor 7 (FIG. 1) pools the fruit vegetables T delivered by the
プールコンベア7の上面は取出し搬送体4の上面と同じ高さ(面一)に設けることも、取出し搬送体4の上面よりも一段低い位置に設けることもできる。プールコンベア7は送り出された果菜Tを先方に搬送するものである。プールコンベア7は低速で連続回転するものであっても、果菜Tが送り出されるたびに所定の移動長(例えば果菜一個のスペース分)間欠回転するものであっても、定時的に間欠回転するものであってもよい。プールコンベア7に無駄な空きスペースができないようにするためには、連続回転式の場合は遅い回転速度にするのが望ましい。回転速度が速いとプールコンベア7の上の空きスペースが多くなり、効率の良いプールができなくなる。果菜一個のスペース分だけ間欠回転する場合は、プールコンベア7の上に、後から送り出される果菜Tが載る分のスペースが確保されるため、後から送り出される果菜Tが、前に送り出された果菜Tに追突するのを防止でき、衝突による果菜Tの損傷を防止することができる。
The upper surface of the pool conveyor 7 can be provided at the same height (level) as the upper surface of the take-out
プールコンベア7の横幅、長さは必要量の果菜Tをプールできるように設計することができる。その材質は果菜Tが傷付きにくいものが適する。プールコンベア7は多数の果菜Tをプールすることができれば、本数、横幅、長さ等は任意に設計することができる。プールコンベア7は連続回転式であっても間欠回転式であってもよい。 The width and length of the pool conveyor 7 can be designed so that the required amount of fruit vegetables T can be pooled. The material is suitable for fruit vegetables T that are not easily damaged. If the pool conveyor 7 can pool many fruit vegetables T, the number, width, length, etc. can be designed arbitrarily. The pool conveyor 7 may be a continuous rotation type or an intermittent rotation type.
図1では取出し搬送体4から直にプールコンベア7に送り出すようにしてあるが、必要であれば、取出し搬送体4とプールコンベア7の間に中継体を配置し、取出し搬送体4から一旦、その中継体に送り出し、その中継体からプールコンベア7に送り出すようにすることもできる。中継体としては例えばプールコンベア7とは回転速度の異なるベルトコンベア或いは回転方向が異なるベルトコンベア(図示せず)とか、細い回転ローラを多数本配置したもの等とすることができる。
In FIG. 1, it is sent directly from the take-out
(果菜自動選別装置の実施形態2)
本発明の果菜自動選別装置の他例について、図5を参照して説明する。この実施形態の果菜自動選別装置の基本構造は前記実施形態1の場合と同様であり、異なるのは取出し搬送体4の構造であり、図5、図6(a)(b)に示すように無端搬送体10に直に二本の引継ぎ突起9aを設けて、果菜キャリア9を使用しないことである。以下の説明では、実施形態1と同様の部分については同一の符号を付し、その説明は省略し、実施形態1と異なる部分についてのみ説明する。
(
Another example of the fruit vegetable automatic sorting apparatus of the present invention will be described with reference to FIG. The basic structure of the fruit vegetable automatic sorting apparatus of this embodiment is the same as that of the first embodiment, and the difference is the structure of the take-out
図5、図6(a)の実施形態では、無端走行体10として実施形態1と同様のタイミングベルトを使用し、その無端走行体10の上に二枚の引継ぎ突起9aを、無端搬送体10の幅方向に並べて突設し、同様に、引継ぎ突起9aを二枚一組として無端搬送体10の走行方向に一定間隔で、無端搬送体10の全周に取り付けてある。
In the embodiment of FIGS. 5 and 6A, the same timing belt as that of the first embodiment is used as the endless traveling
(果菜自動選別装置の実施形態3)
本発明の果菜自動選別装置の他例として図6(b)に示すものは、果菜自動選別装置の基本構造は前記実施形態1の場合と同様であり、異なるのは無端搬送体10に直に三枚の引継ぎ突起9aを一組として突設してある。
(Embodiment 3 of fruit vegetable automatic sorting device)
FIG. 6B shows another example of the automatic vegetable vegetable sorting apparatus according to the present invention. The basic structure of the fruit vegetable automatic sorting device is the same as that in the first embodiment. Three inherited
いずれの実施形態の引継ぎ突起9aも、引継ぎ突起9aの幅方向外側を内側に向け、縦方向中央部を外側に突出させて湾曲させて、丸形の果菜を引継ぎ突起9aで掬い上げ易くなり、掬い上げたき丸形の果菜が引継ぎ突起9aの外に落下しにくくなるようにすることができる。引継ぎ突起9aが三枚の場合は、図6(b)のように移送体2を構成するバーを四本にし、それらバーを、間隔をあけて配置して、四枚のバーの間の三つの間隔を引継ぎ突起9aが通過できる通過空間Sとして、四本のバーの上に載っている果菜Tを掬い上げる(取り上げる)ことができるようにする。この場合の引継ぎ突起9aの形状、材質等も実施形態1、2の引継ぎ突起9aと同様にすることができる。
In any embodiment, the take-up
(果菜自動選別装置の他の実施形態)
前記実施形態1〜3では、果菜搬送体1、移送体2、取出し搬送体4が一条(一列)の場合を一例としているが、果菜搬送体1、移送体2、取出し搬送体4は必要条数を並列に並べることもできる。この場合は、プールコンベア7を各条の取出し搬送体4の側方に配置して、夫々の条の取出し搬送体4から送り出される果菜Tを等階級別にプールできるようにする。
(Other Embodiment of Fruit Vegetable Automatic Sorting Device)
In the first to third embodiments, the case where the fruit and vegetable carrier 1, the
前記実施形態では、無端走行体10としてタイミングベルトを用いた場合を一例としているが、無端走行体10には通常の平ベルトを使用することもできる。また、無端走行体10は、間隔をあけて平行に対向配置された二本の無端チェーン(図示しない)とか、他のコンベア形式で構成することもできる。
In the embodiment, the case where a timing belt is used as the endless traveling
(パック詰め装置及び果菜選別パック詰め装置の実施形態1)
本発明のパック詰め装置の一例を、図面を参照して説明する。一例として図1に示すパック詰め装置20(図1)は、前記果菜自動選別装置15(図1)の先方に設けられており、果菜選別パック詰め装置30は前記果菜自動選別装置15とパック詰め装置20を組み合わせた複合機である。
(Embodiment 1 of Packing Device and Fruit Vegetable Selection Packing Device)
An example of the packing device of the present invention will be described with reference to the drawings. As an example, the pack filling device 20 (FIG. 1) shown in FIG. 1 is provided in front of the fruit and vegetables automatic sorting device 15 (FIG. 1), and the fruit and vegetable sorting and packing
[パック詰め装置]
図1のパック詰め装置20は、前記果菜自動選別装置15のプールコンベア7の先方に配置されており、プールコンベア7から送り出される果菜を受けて次の工程に送り出すパック用引継ぎ体21と、パック用引継ぎ体21の先に配置されたパック用整列体22と、パック用整列体22の先に配置されたパック用搬送体23と、パック用搬送体23の先に配置されたホッパー24と、当該ホッパー24の排出口24bの下に配置されたパック移送体25を備えたものである。
[Packing device]
The
[果菜選別パック詰め装置]
前記果菜選別パック詰め装置30は、前記果菜自動選別装置15と前記パック詰め装置20を組み合わせた複合機である。
[Fruit vegetables sorting and packing equipment]
The fruit vegetable sorting and packing
本発明の果菜自動選別装置15については、前記果菜自動選別装置の実施形態1にて詳細に述べたため、ここではその説明を省略する。
Since the automatic vegetable
[パック用引継ぎ体]
図1の自動パック詰め装置20のパック用引継ぎ体21は、三列のプールコンベア7よりも幅の広いベルトコンベア、他のコンベア或いは下り傾斜の板材であり、プールコンベア7から送り出される果菜Tを引き継いで、パック用整列体22に送り出すものである。
[Transit body for packs]
1 is a belt conveyor wider than the three rows of pool conveyors 7, another conveyor, or a downwardly inclined plate material, and the fruit vegetables T fed from the pool conveyor 7 are collected. It is taken over and sent to the
[パック用整列体]
図1のパック詰め装置20のパック用整列体22は、前記パック用引継ぎ体21から送り出される果菜Tを一列に整列するものであり、図8(a)では並列に六列設けて果菜を六列に整列させることができるようにしてある。パック用整列体22の列数は任意数とすることができる。
[Pack alignment]
The
このパック用整列体22には果菜自動選別装置15(図1)の移送体2(図6(a)(b))を下り傾斜に配置して使用することができる。図6(b)の実施形態では四本のバー2a〜2dを上側と下側に二本ずつ間隔をあけて配置し、下側二本のバー2c、2bの間隔L3(図3(b))は果菜Tが通過しない(落下しない)広さ、上側二本のバー2a、2bの間隔L2は果菜Tが一つ収まる広さとしてある。図6(a)に示すパック用移送体22は三本のバー2a〜2cを三角形に配置してある。バーは五本以上とすることもできる。いずれの場合も、バーの始端側から終端側に向けて下り傾斜にして、果菜Tがその上を転がり落ちるか滑り落ちるようにしてある。パック用整列体22は果菜Tがその上を転がり落ちるか滑り落ちるもの出れば他の構造であってもよく、例えば、上向き開口の半割パイプで構成できることや傾斜角度等については、前記果菜自動選別装置の実施形態1の移送体2と同様である。
For the
[満杯検知センサー]
パック用整列体22の始端側近傍には満杯検知センサー(図示しない)を設けて、パック用整列体22内の果菜Tが満杯になったことを検知できるようにしてある。満杯検知センサーによってパック用整列体22内の果菜Tが満杯になったことが検知されると、パック用引継ぎ体21による果菜Tの送りが停止し、前記センサーによりパック用整列体22内に空きが出たことが検知されると、パック用引継ぎ体21が供給再開するようにしてある。
[Full detection sensor]
A fullness detection sensor (not shown) is provided in the vicinity of the starting end side of the
[パック用搬送体]
パック用搬送体23は、前記パック用整列体22で一列に整列されて送り込まれる果菜Tを、パック用整列体22から一個ずつ取り出してホッパー24に送り込むものであり、パック用整列体22の先方に配置されている。
[Pack carrier]
The
前記パック用搬送体23は果菜自動選別装置15(図1)の取出し搬送体4と同じ構成であり、タイミングベルトや平ベルト等の無端搬送体10(図2(c))に、図4(a)(b)に示す果菜キャリア9を取り付けたものであってもよく、無端搬送体10に引継ぎ突起9aを直に取り付けたものであってもよい。いずれの場合も、パック用搬送体23の出口側において、無端搬送体10の回転により図6(a)(b)のように果菜Tを引継ぎ突起9aで掬い上げて(取り出して)、その引継ぎ突起9aで果菜キャリア9の果菜載せ部9b(図4(a)(b))又は無端搬送体10であって引継ぎ突起9aの先方の果菜載せ部9b(図4(a)(b))の上に一個ずつ送り込んで果菜載せ部9bの上に載せ、送り込んだ引継ぎ突起9aで一個ずつ区画できるようにしてある。無端搬送体10はチェーンとか他の無端回転体であってもよい。
The
図8(a)(b)のパック用搬送体23は、六本のパック用整列体22のそれぞれの先に一本ずつ(合計六本)設けられている。
8A and 8B, one
[定量センサー]
複数本のパック用搬送体23の出口或いはホッパー24の投入口24a付近には、パック用搬送体23からホッパー24に投入された果菜Tの数量を感知する定量センサー(例えば、秤量計:図示せず)が配置されている。図1に示す六本のパック用搬送体23は個別回転可能であり、通常は六本全てが同時に回転して果菜Tをホッパー24にほぼ規定数量送り込んでから(一次投入してから)、その後の送り込み数量を調整する場合は、一本或いは二本といった少数列のパック用搬送体23のみを回転させて、少数の果菜Tを送り込むことができるようにしてある。具体的には、一次投入時には図9(a)のようにすべての列のパック用搬送体23が回転して矢印方向に送り出し、ホッパー24に所定数量送り込まれたことが前記定量センサーで感知されると、図9(b)のように一番外側の一列のパック用搬送体23のみが回転して少数個投入できるようにしてある。このようにすることで、一次投入時後に数個の果菜Tをホッパー24に送り込んで、ホッパー24内の数量を一定(ほぼ一定を含む)にすることができるようにしてある。前記定量センサーで所定数量が検知されると、ホッパー24への供給が停止される。前記少数送り込みのために回転させるパック用搬送体23の本数、回転させるパック用搬送体23の列は、任意の一列或いは二列といったように設計することができる。
[Quantitative sensor]
A quantitative sensor (for example, a weighing meter: not shown) that senses the quantity of fruit vegetables T introduced into the
[ホッパー]
図1のホッパー24は、パック用搬送体23から移送されてきた果菜Tを、一パック分の数量(一つのパックに詰める数量)を貯留し、貯留した果菜Tをパック移送体25で移送されて定位置(ホッパーの排出口の下)に送られてくる空パックPに供給するためのものである。一例として図7に示すホッパー24はパック用搬送体23から送られる果菜Tを投入する上方開口の投入口24aと、ホッパー24内に貯留された果菜Tを空パックPに排出する下細りの排出口24bを備える。
[hopper]
The
[パック移送体]
前記パック移送体25はプラスチック製の空パックPをホッパー24の排出口24bの下に送り込むとともに、ホッパー24の排出口24bから果菜Tを落下させて詰めた充填済みパックPをその先方に送り出すための装置である。パック移送体25には既存のベルトコンベアやローラーコンベアなどを用いることができる。空パックPはパック移送体25の近傍に設置されたストッカー(図示しない)に収容しておくことができる。
[Pack transporter]
The
パック移送体25にはパック定位置センサー(図示しない)を設けてあり、先頭の空パックPがホッパー24の排出口24bの下に到達したことを検知すると、パック移送体(例えばベルトコンベア)25の回転による移送が停止し、ホッパー24の排出口24bを開閉可能な蓋24cが開いて、ホッパー24内の果菜Tが排出口24bから空パックP内に充填されるようにしてある。パック移送体25は空パックP内への果菜Tの充填が終了する(所定量詰める)とパック一個分だけ間欠回転して充填済みパックPをホッパー24の下から送り出すと共に、次の空パックPをホッパー24の排出口24bの下に引き込んで停止するようにしてある。この実施形態では、パック移送体25がパック一つ分間欠回転するたびにストッカーから空パックPが一つパック移送体25上に供給されるようにしてある。
The
(果菜自動選別装置の動作)
本発明の果菜自動選別装置15(図1)は、次の(1)〜(7)のように動作する。
(1)果菜搬送体1から移送体2に果菜Tを供給すると、当該果菜Tは当該移送体2の傾斜によって回転又は滑落しながら自重で下方に移動する。
(2)移送体2の出口側Oに到達した果菜Tは、当該移送体2の下方に配置された取出し搬送体4の上に落下する(図2(b))。
(3)前記(2)の状態で取出し搬送体4が回転すると、当該取出し搬送体4の果菜キャリア9に設けられた引継ぎ突起9aが移送体2の通過空間Sを通過し、移送体2の上の果菜Tを当該引継ぎ突起9aによって掬い上げて(取り出して)引き継ぐ。
(4)前記(3)のように果菜Tが引き継がれると、後続の果菜Tが次の取出し搬送体4の上に落下し、引継ぎ突起9aが移送体2の通過空間Sを通過して果菜Tを引き継ぐ。この繰り返しにより、果菜Tは一個ずつ順次引き継がれて、無端搬送体10の回転により先方へ搬送される。
(5)先方に搬送された果菜Tは、搬送中に計測器5によって一個ずつ計測され、等階級が判別される。
(6)等階級が判別された判別済み果菜Tは、当該等階級用のプールコンベア7の側方に到達すると、送り体6(図1)からエアが噴出され、当該エアによって判別済み果菜Tがプールコンベア7に送り出される。
(7)以降、前記(1)〜(6)の繰り返しにより、果菜Tが連続的に計測・判別され、プールコンベア7に送り出されて自動選別される。
(Operation of fruit vegetable automatic sorting device)
The fruit vegetable automatic sorting device 15 (FIG. 1) of the present invention operates as follows (1) to (7).
(1) When the fruit vegetables T are supplied from the fruit vegetable carrier 1 to the
(2) The fruit vegetables T that have reached the outlet side O of the
(3) When the take-out
(4) When the fruit vegetable T is handed over as in (3) above, the subsequent fruit vegetable T falls onto the next take-out
(5) The fruit vegetables T conveyed to the other side are measured one by one by the measuring
(6) When the determined fruit vegetables T whose isoclass has been determined reach the side of the pool conveyor 7 for the isoclass, air is ejected from the feeding body 6 (FIG. 1), and the determined fruit vegetables T are identified by the air. Is sent to the pool conveyor 7.
(7) Thereafter, the fruit vegetables T are continuously measured and discriminated by repeating the above (1) to (6), sent to the pool conveyor 7 and automatically selected.
(パック詰め装置の動作)
本発明のパック詰め装置20(図1)は、次の(1)〜(7)のように動作する。
(1)図1のプールコンベア7からパック用引継ぎ体21に送り出された果菜Tは、複数列のパック用整列部22に送られて数列に整列し、当該パック用整列部22の下り傾斜によって回転又は滑落しながら自重で下方に移動する。
(2)パック用整列部22の出口側に到達した先頭の果菜Tは、当該パック用整列部22の下方に配置されたパック用搬送体23の無端搬送体10の上に落下する。
(3)前記(2)の状態で、回転中のパック用搬送体23の引継ぎ突起9aがパック用整列体22の通過空間Sを通過して、パック用整列体22の上の果菜Tを掬い上げて引き継ぐ。
(4)引継ぎ突起9aで引き継がれた果菜Tはその果菜載せ部9bの上に載せられて搬送されてホッパー24に投入される。ホッパー24への投入は全ての列のパック用搬送体23を回転させて投入する。ある程度の数量が投入される(一次投入される)と、一部のパック用搬送体23のみを回転させて、数個の果菜を投入(二次投入)して、ホッパー24内の果菜Tを所定数量にする。
(5)果菜Tがホッパー24に所定数量溜まると、パック用搬送体23の回転が停止して、ホッパー24への果菜Tの投入が停止する。
(6)ホッパー24の蓋24cが開いて排出口24bが開口し、排出口24bの下に送り込まれている空パックPにホッパー24内の果菜Tが充填される。充填後は排出口24bの蓋24cが閉じ、充填済みパックPはその先方に送られ、次の空パックPがホッパー24の排出口324bの下に送り込まれる。
(7)以降、前記(1)〜(6)の繰り返しにより、果菜Tのパック詰めが繰り返される。
(Operation of packing device)
The packing device 20 (FIG. 1) of the present invention operates as follows (1) to (7).
(1) The fruit vegetables T sent from the pool conveyor 7 of FIG. 1 to the
(2) The leading fruit T that has reached the outlet side of the
(3) In the state (2), the take-up
(4) The fruit vegetables T handed over by the hand over
(5) When a predetermined amount of fruit vegetables T is accumulated in the
(6) The
(7) After that, the packing of fruit vegetables T is repeated by repeating (1) to (6).
本発明の果菜自動選別方法、果菜自動選別装置、パック詰め装置、果菜選別パック詰め装置、果菜キャリアは前記した果菜以外の果菜の自動選別、自動パック詰めに利用することができる。 The fruit vegetable automatic sorting method, fruit vegetable automatic sorting apparatus, pack packing apparatus, fruit vegetable sorting and packing apparatus, and fruit vegetable carrier of the present invention can be used for automatic selection and automatic packing of fruit vegetables other than the aforementioned fruit vegetables.
1 果菜搬送体
2 移送体
2a〜2d バー
4 取出し搬送体
5 計測器
6 送り体
7 プールコンベア
8 ガイド板
9 果菜キャリア
9a 引継ぎ突起
9b 果菜載せ部
10 無端搬送体
10a 上り傾斜部
10b 上水平走行部
10c 下り傾斜部
10d 戻り傾斜部
10e 下水平走行部
15 果菜自動選別装置
20 パック詰め装置
21 パック用引継ぎ体
22 パック用整列体
23 パック用搬送体
24 ホッパー
24a (ホッパーの)投入口
24b (ホッパーの)排出口
24c (ホッパーの)蓋
25 パック移送体
30 果菜選別パック詰め装置
C コンテナ
L1、L2 間隔
O (移送体の)出口側
P パック
Q (移送体の)入口側
R 移送通路
S 通過空間
T 果菜
DESCRIPTION OF SYMBOLS 1 Fruit
Claims (16)
選別する果菜を下り傾斜の移送体に供給して、その下り傾斜により、果菜を、移送体の上を自動的に移動させ、
前記移送体の所定箇所に到来した果菜を、一個ずつ取り出して一個ずつ区画して搬送し、
前記搬送中の個々の果菜の少なくとも形状、大ききを計測器で自動的に計測し、その計測データに基づいて当該果菜の等階級を判別し、
判別済み果菜を等階級別に、果菜搬送方向側方に送り出して仕分ける、
ことを特徴とする果菜自動選別方法。 It is an automatic fruit vegetable sorting method that measures moving vegetables and discriminates them by class, and sends the sorted fruit vegetables to the side of the fruit transport direction by class and sorts them.
The fruits and vegetables to be selected are supplied to a downwardly inclined transport body, and the downward slope is used to automatically move the fruit vegetables on the transport body,
The fruits and vegetables that have arrived at a predetermined location of the transfer body are taken out one by one and are divided and conveyed one by one,
Automatically measure at least the shape and size of each fruit vegetable being conveyed with a measuring instrument, and determine the equal class of the fruit vegetable based on the measurement data,
The identified fruit vegetables are sent out in the same class and sent to the side of the fruit conveyance direction.
The fruit vegetable automatic selection method characterized by this.
判別済み果菜を等階級別に、果菜搬送方向側方に配置されたプールコンベアに直に又は中継体を介して送り出す、
ことを特徴とする果菜自動選別方法。 In the fruit vegetable automatic selection method according to claim 1,
Send the identified fruit vegetables by equal class, directly to the pool conveyor arranged on the side of the fruit vegetable conveyance direction or via the relay body.
The fruit vegetable automatic selection method characterized by this.
搬送中の判別済み果菜に、エアを吹き付けて、果菜を搬送方向側方又はプールコンベアに送り出す、
ことを特徴とする果菜自動選別方法。 In the fruit vegetable automatic selection method according to claim 1 or claim 2,
Air is blown to the identified fruit vegetables being transported, and the fruit vegetables are sent to the side of the transport direction or to the pool conveyor.
The fruit vegetable automatic selection method characterized by this.
下り傾斜の移送体と、その下り傾斜により移動する果菜を、一個ずつ取り出して搬送する取出し搬送体を備え、
前記取出し搬送体は、引継ぎ突起が無端走行体の二以上の箇所に間隔をあけて取付けられ、果菜載せ部が前記引継ぎ突起よりも無端走行体の走行方向先方に設けられたものであり、
前記引継ぎ突起は前記無端走行体の走行に伴って移動可能であり、
前記移送体は少なくともその移送方向所定箇所に、前記無端走行体の走行により移動する前記引継ぎ突起が通過可能な通過空間を備え、
前記引継ぎ突起は無端走行体の走行に伴って移動して、前記通過空間を下方から上方へ通過して移送体の上の果菜を一個ずつ取り出して前記無端走行体の果菜載せ部の上に載せて搬送することができるものである、
ことを特徴とする果菜自動選別装置。 It is an automatic fruit vegetable sorting device that discriminates the equal class of moving fruit vegetables and sends out the identified fruit vegetables to the side of the fruit vegetable conveyance direction according to equal classes,
A downwardly inclined transfer body, and a take-out transport body that takes out and transports fruits and vegetables moving by the downward slope one by one,
In the take-out transport body, the take-up protrusion is attached to two or more locations of the endless traveling body with a space therebetween, and the fruit and vegetables mounting portion is provided in the traveling direction ahead of the endless traveling body from the hand-over projection,
The handover protrusion is movable along with the traveling of the endless traveling body,
The transfer body is provided with a passage space through which the take-up protrusion that moves due to the traveling of the endless traveling body can pass at least at a predetermined position in the transfer direction;
The take-up protrusion moves as the endless traveling body travels, passes through the passage space from the bottom to the top, takes out the fruits and vegetables on the transfer body one by one, and places them on the fruit and vegetable mounting portion of the endless traveling body. Can be transported,
Fruit vegetable automatic sorting device characterized by that.
下り傾斜の移送体と、その下り傾斜により移動する果菜を、一個ずつ取り出して搬送する取出し搬送体を備え、
前記取出し搬送体は、引継ぎ突起と果菜載せ部を備えた果菜キャリアが、無端走行体の二以上の箇所に間隔をあけて取付けられ、前記果菜載せ部が前記引継ぎ突起よりも無端走行体の走行方向先方に設けられたものであり、
前記果菜キャリアは前記無端走行体の走行に伴って移動可能であり、
前記移送体は少なくともその移送方向所定箇所に、前記無端走行体の走行により移動する前記引継ぎ突起が通過可能な通過空間を備え、
前記引継ぎ突起は無端走行体の走行に伴って移動して、前記通過空間を下方から上方へ通過して移送体の上の果菜を一個ずつ取り出して前記果菜キャリアの果菜載せ部の上に載せて搬送することができるものである、
ことを特徴とする果菜自動選別装置。 It is an automatic fruit vegetable sorting device that discriminates the equal class of moving fruit vegetables and sends out the identified fruit vegetables to the side of the fruit vegetable conveyance direction according to equal classes,
A downwardly inclined transfer body, and a take-out transport body that takes out and transports fruits and vegetables moving by the downward slope one by one,
In the take-out transport body, a vegetable carrier provided with a hand-over projection and a fruit-carried portion is attached to two or more locations of the endless traveling body with a space therebetween, and the fruit-carried portion is traveled by the endless traveling body rather than the hand-over projection. It is provided in the direction ahead,
The fruit vegetable carrier is movable as the endless traveling body travels,
The transfer body is provided with a passage space through which the take-up protrusion that moves due to the traveling of the endless traveling body can pass at least at a predetermined position in the transfer direction;
The take-up protrusion moves as the endless traveling body travels, passes through the passage space from the lower side to the upper side, takes out the fruit vegetables on the transfer body one by one, and places them on the fruit vegetable mounting part of the fruit vegetable carrier. Can be transported,
Fruit vegetable automatic sorting device characterized by that.
プールコンベアが取出し搬送体の果菜搬送方向側方に配置され、
プールコンベアは取出し搬送体の果菜載せ部の上から等階級別に送り出される多数の果菜をプールできる、
ことを特徴とする果菜自動選別装置。 In the fruit vegetable automatic sorting device according to claim 4 or claim 5,
The pool conveyor is placed on the side of the fruit and vegetables in the take-out carrier,
The pool conveyor can pool a large number of fruits and vegetables that are sent out by class from the top of the fruits and vegetables on the take-out carrier.
Fruit vegetable automatic sorting device characterized by that.
取出し搬送体の側方に、その果菜載せ部の上の果菜を、エアを吹き付けて送り出すエア噴出機を備えた、
ことを特徴とする果菜自動選別装置。 In the fruit vegetable automatic selection device according to any one of claims 4 to 6,
On the side of the take-out transport body, it was equipped with an air blower that blows air out the fruit and vegetables on the fruit and vegetables mounting part,
Fruit vegetable automatic sorting device characterized by that.
移送体が間隔をあけて配置された数本の細長材で構成され、それら間隔を引継ぎ突起が下方から上方に通過可能な通過空間とした、
ことを特徴とする果菜自動選別装置。 In the fruit and vegetables automatic selection device according to any one of claims 4 to 7,
The transport body is composed of several elongated materials arranged at intervals, and these intervals are defined as passage spaces through which the takeover projections can pass upward from below.
Fruit vegetable automatic sorting device characterized by that.
果菜自動選別装置から送り出される多数の果菜を引き継ぐパック用引継ぎ体と、パック用引継ぎ体により搬送される果菜を一列に整列させる複数列のパック用整列体と、パック用整列体の各列の果菜を一個ずつ取出して一個ずつ移送する数列のパック用搬送体と、数列のパック用搬送体の先方に設けられたホッパーと、当該ホッパーの排出口の下に空パックを移送するパック移送体を備え、
前記パック用搬送体は列ごとに個別に移動して、夫々のパック用搬送体の果菜を搬送してホッパーに投入できる、
ことを特徴とするパック詰め装置。 A packer that packs fruit vegetables that are sorted by class and sent out by an automatic fruit vegetable sorting device,
A pack takeover body that takes over a large number of fruit vegetables sent out from the fruit vegetable automatic sorting device, a multi-row pack alignment body that aligns the fruit vegetables conveyed by the pack takeover body in a line, and a fruit vegetable in each row of the pack alignment body A plurality of pack transport bodies for picking up one by one and transferring them one by one, a hopper provided in front of the several rows of pack transport bodies, and a pack transport body for transporting an empty pack under the discharge port of the hopper ,
The pack carrier can be moved individually for each row, and the fruit and vegetables of each pack carrier can be conveyed and put into a hopper.
Packing device characterized by that.
数列のパック用搬送体のうち、一部の列のパック用搬送体から果菜をホッパーに送り出して、ホッパーに送り出される果菜の数量を制御する、
ことを特徴とするパック詰め装置。 The packing device according to claim 9,
Out of several rows of pack carriers, fruit vegetables are sent out from some rows of pack carriers to the hopper, and the quantity of fruit vegetables sent to the hopper is controlled.
Packing device characterized by that.
パック用搬送体は、多数の引継ぎ突起が無端走行体にその走行方向に間隔をあけて設けられたもの、又は、引継ぎ突起とその引継ぎ突起で引き継いだ果菜を載せる果菜載せ部を備えた多数の果菜キャリアが無端走行体にその走行方向に間隔をあけて取り付けられたものである、
ことを特徴とするパック詰め装置。 The packing device according to claim 9 or 10,
The pack carrier has a large number of inherited protrusions provided on the endless traveling body at intervals in the traveling direction, or a large number of fruit vegetable mounting parts on which the succeeding protrusions and the fruit vegetables taken over by the succeeding protrusions are placed. The fruit vegetable carrier is attached to the endless traveling body at intervals in the traveling direction.
Packing device characterized by that.
各列のパック用整列体は通過空間を備え、通過空間はパック用引継ぎ体の引継ぎ突起が下方から上方へ通過できるものである、
ことを特徴とするパック詰め装置。 The packing device according to any one of claims 9 to 11,
Each row of pack alignment bodies includes a passage space, and the passage space is such that the take-up projection of the pack take-over body can pass from below to above.
Packing device characterized by that.
果菜自動選別装置が請求項4から請求項8のいずれか1項に記載の果菜自動選別装置であり、
パック詰め装置が請求項9から請求項12のいずれか1項に記載のパック詰め装置であり、
前記パック詰め装置が前記果菜自動選別装置のプールコンベアの先方に配置され、前記プールコンベアから送り出される選別済み果菜が前記パック詰め装置のパック用引継ぎ体に送り込まれるようにした、
ことを特徴とする果菜自動選別パック詰め装置。 In a fruit vegetable sorting and packing device equipped with a fruit vegetable automatic sorting device and a packing device,
The fruit vegetable automatic sorting device is the fruit vegetable automatic sorting device according to any one of claims 4 to 8,
The packing device is the packing device according to any one of claims 9 to 12,
The packing device is arranged at the end of the pool conveyor of the fruit vegetable automatic sorting device, and the selected fruit vegetables sent out from the pool conveyor are sent to the pack takeover body of the packing device,
Fruit vegetable automatic sorting pack filling device characterized by that.
移送体又はパック用整列体で一列に整列されて送られてくる果菜を一個ずつ取り出すことのできる二本以上の引継ぎ突起と、引継ぎ突起で取り出した果菜を載せる果菜載せ部を備え、
前記果菜載せ部は皿状であり、
前記引継ぎ突起は果菜載せ部よりも果菜取り出し方向後方に、果菜載せ部の上面よりも上方に突出して設けられ、前記移送体又はパック用整列体の通過空間を通過可能な横幅である、
ことを特徴とする果菜キャリア。 It is a fruit and vegetable carrier that can take out and put fruit vegetables that are sent in a row, one by one,
It has two or more takeover protrusions that can take out the fruits and vegetables that are sent in a line by a transfer body or an alignment body for packs, and a fruit vegetable mounting part on which the fruit vegetables taken out by the takeover protrusions are placed,
The fruit vegetable placement part is dish-shaped,
The take-up protrusion is provided rearwardly in the direction of taking out the fruit vegetables from the fruit vegetable placing part and projecting upward from the upper surface of the fruit vegetable placing part, and has a lateral width capable of passing through the passing space of the transfer body or pack alignment body.
A fruit vegetable carrier characterized by that.
果菜載せ部の表面が、果菜安定用の窪みを備えた、
ことを特徴とする果菜キャリア。 In the fruit vegetable carrier according to claim 14,
The surface of the fruit vegetable mounting part is equipped with a hollow for stabilizing fruit vegetables,
A fruit vegetable carrier characterized by that.
引継ぎ突起と果菜載せ部の双方又は一方が軟質材又は弾性材で成形された、
ことを特徴とする果菜キャリア。
In the fruit and vegetable carrier according to claim 14 or claim 15,
Both or one of the take-up projection and the fruit vegetable placement part is formed of a soft material or an elastic material,
A fruit vegetable carrier characterized by that.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015123096A JP2017006826A (en) | 2015-06-18 | 2015-06-18 | Fruit-vegetable automatic sorting method, fruit-vegetable automatic sorting apparatus, packing apparatus, fruit-vegetable sorting packing apparatus, and fruit-vegetable carrier |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015123096A JP2017006826A (en) | 2015-06-18 | 2015-06-18 | Fruit-vegetable automatic sorting method, fruit-vegetable automatic sorting apparatus, packing apparatus, fruit-vegetable sorting packing apparatus, and fruit-vegetable carrier |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017006826A true JP2017006826A (en) | 2017-01-12 |
Family
ID=57760931
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015123096A Pending JP2017006826A (en) | 2015-06-18 | 2015-06-18 | Fruit-vegetable automatic sorting method, fruit-vegetable automatic sorting apparatus, packing apparatus, fruit-vegetable sorting packing apparatus, and fruit-vegetable carrier |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017006826A (en) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108515034A (en) * | 2018-03-02 | 2018-09-11 | 扬州广通电力机具有限公司 | A kind of novel sorting orientation triggering mechanism |
| JP2020001745A (en) * | 2018-06-27 | 2020-01-09 | 株式会社細川洋行 | Filling device |
| WO2021201702A1 (en) * | 2020-04-02 | 2021-10-07 | Rockit Global Limited | Improvements in and relating to packaging |
| CN114229088A (en) * | 2022-02-28 | 2022-03-25 | 山东凯欣绿色农业发展股份有限公司 | Device and method for packaging quick-frozen fruits and vegetables |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS4970677U (en) * | 1972-10-03 | 1974-06-19 | ||
| JPS5378183U (en) * | 1976-12-01 | 1978-06-29 | ||
| JPH0710235A (en) * | 1993-06-21 | 1995-01-13 | Nhk Spring Co Ltd | Transport chute for article |
| JPH10297754A (en) * | 1997-04-30 | 1998-11-10 | Mitsubishi Heavy Ind Ltd | Automatic sorting device |
| JP2003053275A (en) * | 2001-08-16 | 2003-02-25 | Nippon Kyodo Kikaku Kk | Automatic fruit vegetable sorter |
-
2015
- 2015-06-18 JP JP2015123096A patent/JP2017006826A/en active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS4970677U (en) * | 1972-10-03 | 1974-06-19 | ||
| JPS5378183U (en) * | 1976-12-01 | 1978-06-29 | ||
| JPH0710235A (en) * | 1993-06-21 | 1995-01-13 | Nhk Spring Co Ltd | Transport chute for article |
| JPH10297754A (en) * | 1997-04-30 | 1998-11-10 | Mitsubishi Heavy Ind Ltd | Automatic sorting device |
| JP2003053275A (en) * | 2001-08-16 | 2003-02-25 | Nippon Kyodo Kikaku Kk | Automatic fruit vegetable sorter |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108515034A (en) * | 2018-03-02 | 2018-09-11 | 扬州广通电力机具有限公司 | A kind of novel sorting orientation triggering mechanism |
| JP2020001745A (en) * | 2018-06-27 | 2020-01-09 | 株式会社細川洋行 | Filling device |
| US11396390B2 (en) | 2018-06-27 | 2022-07-26 | Hosokawa Yoko Co., Ltd. | Filling apparatus |
| JP7163081B2 (en) | 2018-06-27 | 2022-10-31 | 株式会社細川洋行 | filling equipment |
| WO2021201702A1 (en) * | 2020-04-02 | 2021-10-07 | Rockit Global Limited | Improvements in and relating to packaging |
| CN114229088A (en) * | 2022-02-28 | 2022-03-25 | 山东凯欣绿色农业发展股份有限公司 | Device and method for packaging quick-frozen fruits and vegetables |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6608839B2 (en) | Shift and hold conveyor device for removing oversized parcels | |
| ES2894687T3 (en) | Package handling procedure | |
| JP6333394B2 (en) | Singulator conveyor system for large bags of hard and small parcels | |
| CA2757936C (en) | Device for the return of empties, in particular plastic bottles and metal cans | |
| JP2017105596A (en) | Fruit vegetables transfer handover method, fruit vegetables transfer handover device, fruit vegetables automatic sorting method, fruit vegetables automatic sorting device, fruit vegetables container filling method, fruit vegetables container filling device, fruit vegetables sorting container filling method, and fruit vegetables sorting container filling device | |
| US10315227B2 (en) | Stepped wall singulator conveyor for oversized item removal | |
| KR102442707B1 (en) | Tray transfer device for sorting fruit | |
| US7743904B2 (en) | Device for individual conveying of elongate articles | |
| JPH069035A (en) | Method and device for transfer of package | |
| JP2017006826A (en) | Fruit-vegetable automatic sorting method, fruit-vegetable automatic sorting apparatus, packing apparatus, fruit-vegetable sorting packing apparatus, and fruit-vegetable carrier | |
| KR20190015245A (en) | An order-sorting machine having an apparatus for filling a group of chemical packs according to an order into each carrier container | |
| JP2007204222A (en) | Article carrying device | |
| JP2018094453A (en) | Automatic fruit/vegetable sorting method and automatic fruit/vegetable sorting device | |
| JPH11292021A (en) | Sorter for long agricultural product | |
| US20200238338A1 (en) | Packet sorting/handling system having a platform conveyor and a gravity transfer unit | |
| JP2548840B2 (en) | Transport equipment for crop selection | |
| US20170275029A1 (en) | Method and Device for Automatic Packing of Wood | |
| JP3350494B2 (en) | Waste plastic sorting equipment | |
| CN111646183A (en) | Automatic article separating and sorting system and method | |
| JP3795674B2 (en) | Supply equipment for long produce | |
| JP2006068744A (en) | Agricultural product sorting device | |
| JP6502827B2 (en) | Fruit and vegetables automatic sorting device | |
| US20230114128A1 (en) | Device for transferring items to be conveyed between two conveyor devices and a conveyor system and a transfer method | |
| JP2515116Y2 (en) | Transport equipment for crop selection | |
| JP2016137948A (en) | Spherical fruits and vegetables take-over transfer device and spherical fruits and vegetables pack filling device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180411 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190212 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190305 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20190507 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20190903 |