JP2016116745A - Tilt determination device, tilt determination system, tilt determination method and program - Google Patents
Tilt determination device, tilt determination system, tilt determination method and program Download PDFInfo
- Publication number
- JP2016116745A JP2016116745A JP2014258824A JP2014258824A JP2016116745A JP 2016116745 A JP2016116745 A JP 2016116745A JP 2014258824 A JP2014258824 A JP 2014258824A JP 2014258824 A JP2014258824 A JP 2014258824A JP 2016116745 A JP2016116745 A JP 2016116745A
- Authority
- JP
- Japan
- Prior art keywords
- inclination
- unit
- user
- information
- exercise
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images















Abstract
Description
本発明は、傾き判定装置、傾き判定システム、傾き判定方法及びプログラムに関する。 The present invention relates to an inclination determination apparatus, an inclination determination system, an inclination determination method, and a program.
特許文献1では、ユーザーの後方からゴルフスイング運動をカメラ等で撮影し、撮影した画像からスイングプレーンを特定し、スイングプレーンを表示すると共に、スイングプレーンの面積を測定して表示する手法が開示されている。スイングプレーンとは、腕、クラブシャフト、及びクラブヘッド(あるいはクラブシャフトとクラブヘッド)によって構成される線分が、ゴルフスイング運動中に移動して軌跡として残る平面であり、一般に、スイング後方から見た際に、スイングプレーンができるだけ面積を持たずに線分に近い方が良いスイングとされている。従って、特許文献1の手法によれば、ユーザーは、スイングプレーンの面積の情報から、スイングの良し悪しを定量的に知ることができる。
しかしながら、スイングプレーンの面積が小さくても、スイングの軌道によってはフック系やスライス系の打球となることもあり、必ずしも良いスイングとは限らない。そこで、ゴルフスイングの指導にあたっては、シャフトプレーンおよびホーガンプレーン等の指標が用いられる場合がある。シャフトプレーンとは、ゴルフのアドレス時(静止状態)においてゴルフクラブのシャフトの長軸方向とターゲットライン(打球方向)とで構成される面であり、ホーガンプレーンとは、ゴルフのアドレス時において、ゴルファーの肩付近(肩や首の付け根など)とゴルフクラブのヘッド(あるいは、ボール)を結ぶ仮想線とターゲットライン(打球の目標方向)とで構成される面である。このシャフトプレーンとホーガンプレーンにより挟まれる領域はVゾーンと呼ばれ、ダウンスイング時にゴルフクラブの軌跡がVゾーンに入っていればストレート系の打球になることが知られている。従って、ダウンスイング時にゴルフクラブの軌跡がVゾーンに入っているか否かによってスイングの良し悪しを評価することができる。 However, even if the area of the swing plane is small, depending on the trajectory of the swing, it may be a hook-type or slice-type hit ball, and it is not always a good swing. Therefore, in the guidance of the golf swing, an index such as a shaft plane and a Hogan plane may be used. The shaft plane is a plane composed of the major axis direction of the golf club shaft and the target line (direction of hitting ball) at the time of golf addressing (still state), and the Hogan plane is a golfer at the time of golf addressing. Is a plane composed of a virtual line connecting the vicinity of the shoulder (such as the base of the shoulder and neck) and the head (or ball) of the golf club and a target line (target direction of the hit ball). A region sandwiched between the shaft plane and the Hogan plane is called a V zone, and it is known that if a golf club track is in the V zone during a downswing, it becomes a straight hit ball. Therefore, the quality of the swing can be evaluated based on whether or not the golf club locus is in the V zone during the downswing.
Vゾーンを特定するためには、アドレス姿勢時のゴルフクラブのシャフトの傾きを求める必要があるが、従来の手法では、運動開始前にユーザーがアドレス姿勢をとっていない時のシャフトの傾きを求めてしまう場合があり、この場合、シャフトの傾きが適正な範囲にないので、あり得ないVゾーンが生成される可能性があった。このように、運動開始前のシャフトの傾きが適正な範囲であるか否かを判定できなければ、これ以外にも、例えば、ユーザーに対して運動開始の許可を誤って行ってしまうなど、様々な問題も生じ得る。そして、これらの問題はゴルフスイング以外の様々な運動においても生じ得る。 In order to specify the V zone, it is necessary to obtain the inclination of the shaft of the golf club at the address posture, but in the conventional method, the inclination of the shaft when the user does not take the address posture is determined before starting the exercise. In this case, since the inclination of the shaft is not in an appropriate range, an impossible V zone may be generated. In this way, if it is not possible to determine whether the inclination of the shaft before the start of the exercise is within an appropriate range, there are various other cases such as erroneously permitting the user to start the exercise, for example. Problems can also arise. These problems can also occur in various exercises other than golf swings.
本発明は、以上のような問題点に鑑みてなされたものであり、本発明のいくつかの態様によれば、運動開始前の運動器具の傾きが適正な範囲に含まれるか否かを判定可能な傾き判定装置、傾き判定システム、傾き判定方法及びプログラムを提供することができる。 The present invention has been made in view of the above problems, and according to some aspects of the present invention, it is determined whether or not the inclination of the exercise apparatus before the start of exercise is within an appropriate range. A possible tilt determination device, tilt determination system, tilt determination method, and program can be provided.
本発明は前述の課題の少なくとも一部を解決するためになされたものであり、以下の態様または適用例として実現することが可能である。 SUMMARY An advantage of some aspects of the invention is to solve at least a part of the problems described above, and the invention can be implemented as the following aspects or application examples.
[適用例1]
本適用例に係る傾き判定装置は、慣性センサーの出力信号を用いて、運動開始前の運動器具の傾きを算出する傾き算出部と、前記運動器具の傾きが、前記運動器具に関する情報とユーザーの身体情報とに基づいて決定される基準範囲に含まれるか否かを判定する判定部と、を含む。
[Application Example 1]
The inclination determination device according to this application example uses an output signal of the inertial sensor to calculate an inclination of the exercise equipment before starting exercise, and the inclination of the exercise equipment includes information on the exercise equipment and the user's And a determination unit that determines whether or not it is included in a reference range determined based on physical information.
慣性センサーは、加速度や角速度等の慣性量を計測可能なセンサーであればよく、例えば、加速度や角速度を計測可能な慣性計測ユニット(IMU:Inertial Measurement Unit)でもよい。また、慣性センサーは、例えば、運動器具又はユーザーの部位に取り付けられ、運動器具やユーザーに対して脱着可能であってもよいし、運動器具に内蔵されるなど、運動器具に固定されていて取り外すことができないものでもよい。 The inertial sensor may be any sensor that can measure an inertia amount such as acceleration or angular velocity, and may be, for example, an inertial measurement unit (IMU) that can measure acceleration or angular velocity. In addition, the inertial sensor may be attached to the exercise equipment or the user's site, and may be detachable from the exercise equipment or the user, or may be fixed to the exercise equipment such as being incorporated in the exercise equipment. Something that can't be done.
運動器具は、各種の運動に用いられる器具であり、例えば、ゴルフクラブ、テニスラケット、野球のバット、ホッケーのスティック等のスイングに用いられる器具であってもよい。 The exercise apparatus is an apparatus used for various types of exercise, and may be an apparatus used for swinging golf clubs, tennis rackets, baseball bats, hockey sticks, and the like.
傾き算出部は、運動開始前の運動器具の傾きを直接的に算出してもよいし、運動器具の傾きを特定可能な情報(例えば、運動器具に対する相対的な位置や姿勢が既知である場合の慣性センサーの検出軸の傾きあるいは慣性センサーの姿勢角)を算出することにより、運動器具の傾きを間接的に算出してもよい。また、判定部は、運動器具の傾きが基準範囲に含まれるか否かを直接的に判定してもよいし、運動器具の傾きを特定可能な情報が、運動器具の傾きの基準範囲に対応する所望の範囲に含まれるか否かを判定することにより、運動器具の傾きが基準範囲に含まれるか否かを間接的に判定してもよい。 The inclination calculation unit may directly calculate the inclination of the exercise equipment before the start of exercise, or information that can specify the inclination of the exercise equipment (for example, when the relative position or posture with respect to the exercise equipment is known) The inclination of the exercise apparatus may be indirectly calculated by calculating the inclination of the detection axis of the inertia sensor or the attitude angle of the inertia sensor. The determination unit may directly determine whether or not the inclination of the exercise equipment is included in the reference range, and information that can specify the inclination of the exercise equipment corresponds to the reference range of the inclination of the exercise equipment. It may be determined indirectly whether or not the inclination of the exercise apparatus is included in the reference range by determining whether or not it is included in the desired range.
本適用例に係る傾き判定装置は、ユーザーが運動開始前に適正な基本姿勢をとった場合には、運動器具やユーザーの身体に応じて運動器具の傾きの適正な範囲が決まることに着目し、運動開始前の運動器具の傾きが、運動器具に関する情報とユーザーの身体情報とに基づいて決定される基準範囲に含まれるか否かを判定する。従って、本適用例に係る傾き判定装置によれば、ユーザーの運動開始前の運動器具の傾きが適正な範囲に含まれるか否かを判定することができる。 The tilt determination device according to this application example focuses on the fact that the appropriate range of tilt of the exercise equipment is determined according to the exercise equipment and the user's body when the user takes an appropriate basic posture before starting the exercise. Then, it is determined whether or not the inclination of the exercise device before the start of exercise is included in a reference range determined based on the information related to the exercise device and the physical information of the user. Therefore, according to the inclination determination apparatus according to the application example, it is possible to determine whether or not the inclination of the exercise apparatus before the user starts exercising is included in an appropriate range.
[適用例2]
上記適用例に係る傾き判定装置において、前記身体情報は、身長、腕の長さ及び脚の長さの少なくとも1つの情報を含んでもよい。
[Application Example 2]
In the tilt determination apparatus according to the application example described above, the body information may include at least one information of a height, an arm length, and a leg length.
本適用例に係る傾き判定装置によれば、ユーザーの運動開始前の運動器具の傾きが、ユーザーの体格を考慮した適正な範囲に含まれるか否かを判定することができる。 According to the inclination determination apparatus according to this application example, it is possible to determine whether or not the inclination of the exercise apparatus before the user's exercise is included in an appropriate range in consideration of the user's physique.
[適用例3]
上記適用例に係る傾き判定装置において、前記身体情報は、さらに性別の情報を含んでもよい。
[Application Example 3]
In the inclination determination apparatus according to the application example, the physical information may further include sex information.
本適用例に係る傾き判定装置によれば、ユーザーの運動開始前の運動器具の傾きが、ユーザーの体格だけでなく性別も考慮した適正な範囲に含まれるか否かを判定することができる。 According to the inclination determination apparatus according to this application example, it is possible to determine whether or not the inclination of the exercise apparatus before the start of the user's exercise is included in an appropriate range considering not only the user's physique but also gender.
[適用例4]
上記適用例に係る傾き判定装置において、前記運動器具に関する情報は、前記運動器具の長さの情報および前記運動器具の種類の少なくとも一方の情報であってもよい。
[Application Example 4]
In the tilt determination apparatus according to the application example, the information on the exercise equipment may be information on the length of the exercise equipment and information on at least one of the types of the exercise equipment.
本適用例に係る傾き判定装置によれば、ユーザーの運動開始前の運動器具の傾きが、運動器具の長さや種類を考慮した適正な範囲に含まれるか否かを判定することができる。 According to the inclination determination apparatus according to this application example, it is possible to determine whether or not the inclination of the exercise apparatus before the start of the user's exercise is included in an appropriate range in consideration of the length and type of the exercise apparatus.
[適用例5]
上記適用例に係る傾き判定装置は、前記判定部によって前記運動器具の傾きが前記基準範囲に含まれると判定された場合に、運動の開始の許可を通知する通知部を含んでもよい。
[Application Example 5]
The inclination determination apparatus according to the application example may include a notification unit that notifies the start of exercise when the determination unit determines that the inclination of the exercise apparatus is included in the reference range.
本適用例に係る傾き判定装置によれば、ユーザーは運動開始前に適正な基本姿勢をとれているか否かを判断することができる。 According to the inclination determination apparatus according to this application example, the user can determine whether or not the user has taken an appropriate basic posture before starting the exercise.
[適用例6]
上記適用例に係る傾き判定装置は、前記判定部によって前記運動器具の傾きが前記基準範囲に含まれると判定された場合に、前記慣性センサーの出力信号を用いて、前記運動器具の長軸方向に沿った第1軸を特定する第1特定部を含んでもよい。
[Application Example 6]
In the inclination determination device according to the application example, when the determination unit determines that the inclination of the exercise apparatus is included in the reference range, the output signal of the inertial sensor is used to determine the direction of the long axis of the exercise apparatus. The 1st specific part which specifies the 1st axis | shaft along may be included.
本適用例に係る傾き判定装置によれば、ユーザーが運動開始前に適正な基本姿勢をとれた状態における運動器具の長軸方向を特定することができる。 According to the inclination determination apparatus according to this application example, it is possible to specify the long axis direction of the exercise apparatus in a state where the user has taken an appropriate basic posture before starting the exercise.
[適用例7]
上記適用例に係る傾き判定装置において、前記第1特定部は、前記運動器具の傾きが前記基準範囲に含まれている時の前記慣性センサーの出力信号を用いて、前記第1軸を特定してもよい。
[Application Example 7]
In the inclination determination device according to the application example, the first specifying unit specifies the first axis using an output signal of the inertial sensor when the inclination of the exercise apparatus is included in the reference range. May be.
[適用例8]
上記適用例に係る傾き判定装置は、前記判定部によって前記運動器具の傾きが前記基準範囲に含まれると判定された場合に、前記慣性センサーの出力信号を用いて、前記ユーザーの頭部と胸部の間の所定位置と打撃位置とを結ぶ第2軸を特定する第2特定部を含んでもよい。
[Application Example 8]
In the inclination determination device according to the application example, when the determination unit determines that the inclination of the exercise apparatus is included in the reference range, the user's head and chest are output using the output signal of the inertial sensor. A second specifying unit that specifies a second axis connecting the predetermined position and the hitting position may be included.
本適用例に係る傾き判定装置は、前記慣性センサーの出力信号と前記身体情報とを用いて、前記所定位置を推定してもよい。 The tilt determination apparatus according to this application example may estimate the predetermined position using an output signal of the inertial sensor and the physical information.
本適用例に係る傾き判定装置によれば、ユーザーが運動開始前に適正な基本姿勢をとれた状態における頭部と胸部の間の所定位置と打撃位置とを結ぶ第2軸を特定することができる。 According to the inclination determination apparatus according to this application example, it is possible to identify the second axis that connects the predetermined position between the head and the chest and the striking position in a state in which the user has taken an appropriate basic posture before starting the exercise. it can.
[適用例9]
上記適用例に係る傾き判定装置において、前記第2特定部は、前記運動器具の傾きが前記基準範囲に含まれている時の前記慣性センサーの出力信号を用いて、前記第2軸を特定してもよい。
[Application Example 9]
In the inclination determination device according to the application example, the second specifying unit specifies the second axis using an output signal of the inertial sensor when the inclination of the exercise apparatus is included in the reference range. May be.
[適用例10]
本適用例に係る傾き判定システムは、上記のいずれかの傾き判定装置と、前記慣性センサーと、を含む。
[Application Example 10]
A tilt determination system according to this application example includes any one of the tilt determination apparatuses described above and the inertial sensor.
[適用例11]
本適用例に係る傾き判定方法は、慣性センサーの出力信号を用いて、運動開始前の運動器具の傾きを算出する傾き算出工程と、前記運動器具の傾きが、前記運動器具に関する情
報とユーザーの身体情報とに基づいて決定される基準範囲に含まれるか否かを判定する判定工程と、を含む。
[Application Example 11]
The inclination determination method according to this application example includes an inclination calculation step of calculating an inclination of the exercise equipment before the start of exercise using an output signal of the inertial sensor, and the inclination of the exercise equipment includes information on the exercise equipment and a user's And a determination step of determining whether or not it is included in a reference range determined based on physical information.
本適用例に係る傾き判定方法は、ユーザーが運動開始前に適正な基本姿勢をとった場合には、運動器具やユーザーの身体に応じて運動器具の傾きの適正な範囲が決まることに着目し、運動開始前の運動器具の傾きが、運動器具に関する情報とユーザーの身体情報とに基づいて決定される基準範囲に含まれるか否かを判定する。従って、本適用例に係る傾き判定方法によれば、ユーザーの運動開始前の運動器具の傾きが適正な範囲に含まれるか否かを判定することができる。 The inclination determination method according to this application example focuses on the fact that the appropriate range of the inclination of the exercise equipment is determined according to the exercise equipment and the user's body when the user takes an appropriate basic posture before starting the exercise. Then, it is determined whether or not the inclination of the exercise device before the start of exercise is included in a reference range determined based on the information related to the exercise device and the physical information of the user. Therefore, according to the inclination determination method according to this application example, it is possible to determine whether or not the inclination of the exercise apparatus before the start of the user's exercise is included in an appropriate range.
[適用例12]
本適用例に係るプログラムは、慣性センサーの出力信号を用いて、運動開始前の運動器具の傾きを算出する傾き算出工程と、前記運動器具の傾きが、前記運動器具に関する情報とユーザーの身体情報とに基づいて決定される基準範囲に含まれるか否かを判定する判定工程と、をコンピューターに実行させる。
[Application Example 12]
The program according to this application example uses an output signal of the inertial sensor to calculate an inclination of the exercise equipment before starting exercise, and the inclination of the exercise equipment includes information on the exercise equipment and user physical information. And a determination step of determining whether or not it is included in a reference range determined based on the above.
本適用例に係るプログラムは、ユーザーが運動開始前に適正な基本姿勢をとった場合には、運動器具やユーザーの身体に応じて運動器具の傾きの適正な範囲が決まることに着目し、運動開始前の運動器具の傾きが、運動器具に関する情報とユーザーの身体情報とに基づいて決定される基準範囲に含まれるか否かをコンピューターに判定させる。従って、本適用例に係るプログラムによれば、ユーザーの運動開始前の運動器具の傾きが適正な範囲に含まれるか否かをコンピューターに判定させることができる。 The program according to this application example focuses on the fact that when the user takes an appropriate basic posture before starting exercise, the appropriate range of inclination of the exercise equipment is determined according to the exercise equipment and the user's body. The computer determines whether or not the inclination of the exercise device before the start is included in a reference range determined based on the information related to the exercise device and the physical information of the user. Therefore, according to the program according to the application example, it is possible to cause the computer to determine whether or not the inclination of the exercise apparatus before the start of the user's exercise is included in an appropriate range.
以下、本発明の好適な実施形態について図面を用いて詳細に説明する。なお、以下に説
明する実施の形態は、特許請求の範囲に記載された本発明の内容を不当に限定するものではない。また以下で説明される構成の全てが本発明の必須構成要件であるとは限らない。
DESCRIPTION OF EMBODIMENTS Hereinafter, preferred embodiments of the present invention will be described in detail with reference to the drawings. The embodiments described below do not unduly limit the contents of the present invention described in the claims. Also, not all of the configurations described below are essential constituent requirements of the present invention.
以下では、ゴルフスイングの解析を行う傾き判定システム(運動解析システム)を例に挙げて説明する。 In the following, an inclination determination system (motion analysis system) that performs golf swing analysis will be described as an example.
1.傾き判定システム
1−1.傾き判定システムの概要
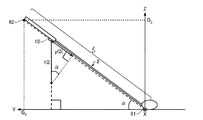
図1は、本実施形態の傾き判定システムの概要について説明するための図である。本実施形態の傾き判定システム1(運動解析システム)は、センサーユニット10(慣性センサーの一例)及び傾き判定装置20(運動解析装置)を含んで構成されている。
1. Inclination determination system 1-1. Overview of Inclination Determination System FIG. 1 is a diagram for describing an overview of an inclination determination system according to this embodiment. The tilt determination system 1 (motion analysis system) of the present embodiment includes a sensor unit 10 (an example of an inertial sensor) and a tilt determination device 20 (motion analysis device).
センサーユニット10は、3軸の各軸方向に生じる加速度と3軸の各軸回りに生じる角速度を計測可能であり、ゴルフクラブ3(運動器具の一例)に装着される。
The
本実施形態では、図2に示すように、センサーユニット10は、3つの検出軸(x軸,y軸,z軸)のうちの1軸、例えばy軸をシャフトの長軸方向に合わせて、ゴルフクラブ3のシャフトの一部に取り付けられる。望ましくは、センサーユニット10は、打球時の衝撃が伝わりにくく、スイング時に遠心力がかからないグリップに近い位置に取り付けられる。シャフトは、ゴルフクラブ3のヘッドを除いた柄の部分であり、グリップも含まれる。ただし、センサーユニット10は、ユーザー2の部位(例えば、手やグローブなど)に取り付けられてもよいし、腕時計などのアクセサリーに取り付けられてもよい。
In the present embodiment, as shown in FIG. 2, the
ユーザー2は、あらかじめ決められた手順に従って、ゴルフボール4を打球するスイング動作を行う。図3は、ユーザー2が行う動作の手順を示す図である。図3に示すように、ユーザー2は、まず、傾き判定装置20を介してユーザー2の身体情報とユーザー2が使用するゴルフクラブ3に関する情報(ゴルフクラブ情報)などの入力操作を行う(S1)。身体情報は、ユーザー2の身長、腕の長さ及び脚の長さの少なくとも1つの情報を含み、さらに性別の情報やその他の情報を含んでもよい。ゴルフクラブ情報は、ゴルフクラブ3の長さ(クラブ長)の情報およびゴルフクラブ3の種類(番手)の少なくとも一方の情報を含む。次に、ユーザー2は、傾き判定装置20を介して計測開始操作(センサーユニット10に計測を開始させるための操作)を行う(S2)。次に、ユーザー2は、傾き判定装置20からアドレス姿勢(運動開始前の基本姿勢)をとるように指示する通知(例えば音声による通知)を受けた後(S3のY)、ゴルフクラブ3のシャフトの長軸がターゲットライン(打球の目標方向)に対して垂直となるようにアドレスの姿勢をとり、静止する(S4)。次に、ユーザー2は、傾き判定装置20からスイングを許可する通知(例えば音声による通知)を受けた後(S5のY)、スイング動作を行い、ゴルフボール4を打球する(S6)。
The
図4(A)は、傾き判定装置20の表示部に表示される身体情報の入力画面の一例を示す図であり、図4(B)は、傾き判定装置20の表示部に表示されるゴルフクラブ情報の入力画面の一例を示す図である。ユーザー2は、図3のS1において、図4(A)に示す入力画面上で身長、性別、年齢、国籍などの身体情報を入力し、図4(B)に示す入力画面上でクラブ長、番手などのゴルフクラブ情報を入力する。なお、身体情報に含まれる情報は、これに限られず、例えば、身体情報は、身長に代えて又は身長とともに腕の長さ及び脚の長さの少なくとも一方の情報を含んでもよい。同様に、ゴルフクラブ情報に含まれる情報は、これに限られず、例えば、ゴルフクラブ情報は、クラブ長と番手のいずれか一方の情報を含まなくてもよいし、他の情報を含んでもよい。
FIG. 4A is a diagram illustrating an example of an input screen for physical information displayed on the display unit of the
ユーザー2が図3のS2の計測開始操作を行うと、センサーユニット10は、所定周期
(例えば1ms)で3軸加速度と3軸角速度を計測し、計測したデータを順次、傾き判定装置20に送信する。センサーユニット10と傾き判定装置20との間の通信は、無線通信でもよいし、有線通信でもよい。
When the
傾き判定装置20は、センサーユニット10が計測したデータ(慣性センサーの出力信号の一例)を用いて、ユーザー2の運動開始前のゴルフクラブ3の傾きを算出し、運動器具の傾きが、図3のS1で入力されたゴルフクラブ情報と身体情報とに基づいて決定される基準範囲に含まれるか否かを判定する。そして、傾き判定装置20は、運動開始前のゴルフクラブ3の傾きが基準範囲に含まれると判定した場合に、図3のS5に示したスイング開始の許可(運動の開始の許可の一例)をユーザー2に通知し、その後、ユーザー2がゴルフクラブ3を用いて打球したスイング運動を解析する。例えば、傾き判定装置20は、センサーユニット10が計測した計測データを用いて、スイングにおけるゴルフクラブ3のヘッドやグリップエンドの軌跡情報を生成する。
The
特に、本実施形態では、傾き判定装置20は、ユーザー2の運動開始前のゴルフクラブ3の傾きが基準範囲に含まれると判定した場合に、ゴルフクラブ3の傾きが基準範囲に含まれている時のセンサーユニット10の計測データを用いて、ゴルフクラブ3の長軸方向に沿った第1軸を特定し、この第1軸を基にユーザー2の静止時(アドレス時)における第1仮想平面であるシャフトプレーンを特定する。また、傾き判定装置20は、ユーザー2の運動開始前のゴルフクラブ3の傾きが基準範囲に含まれると判定した場合に、ゴルフクラブ3の傾きが基準範囲に含まれている時のセンサーユニット10の計測データを用いて、ユーザー2の頭部と胸部の間の所定位置と打撃位置とを結ぶ第2軸を特定し、この第2軸を基にユーザー2の静止時(アドレス時)における第2仮想平面であるホーガンプレーンを特定する。そして、傾き判定装置20は、ユーザー2のスイング開始から打球時までのゴルフクラブ3の軌跡がシャフトプレーンとホーガンプレーンとの間のVゾーンと呼ばれる空間に含まれるか否かを判定する。また、傾き判定装置20は、ユーザー2のスイングにおけるゴルフクラブ3の軌跡、シャフトプレーン及びホーガンプレーンを含む画像データを生成し、当該画像データに応じた画像を表示部(ディスプレイ)に表示させる。傾き判定装置20は、例えば、スマートフォンなどの携帯機器やパーソナルコンピューター(PC)であってもよい。
In particular, in this embodiment, when the
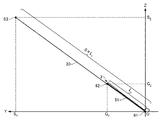
図5は、本実施形態におけるユーザー2のアドレス時のシャフトプレーン及びホーガンプレーン示す図である。本実施形態では、打球の目標方向を示すターゲットラインをX軸、X軸に垂直な水平面上の軸をY軸、鉛直上方向(重力加速度の方向と逆方向)をZ軸とするXYZ座標系(グローバル座標系)を定義し、図5にはX軸、Y軸、Z軸が表記されている。
FIG. 5 is a diagram showing a shaft plane and a Hogan plane at the time of the address of the
図5に示すように、本実施形態では、ユーザー2のアドレス時のシャフトプレーン30はゴルフクラブ3のシャフトの長軸方向に沿った第1軸としての第1線分51と、打球の目標方向を表す第3軸としての第3線分52と、を含み、T1,T2,S1,S2を4つの頂点とする仮想平面である。本実施形態では、ゴルフクラブ3のヘッド(打撃部)の位置61をXYZ座標系の原点O(0,0,0)とし、第1線分51は、ゴルフクラブ3のヘッドの位置61(原点O)とグリップエンドの位置62とを結ぶ線分である。また、第3線分52は、X軸上のT1,T2を両端として原点Oを中点とする長さTLの線分である。ユーザー2がアドレス時に図3のS4の動作を行うことでゴルフクラブ3のシャフトがターゲットライン(X軸)に対して垂直となるので、第3線分52は、ゴルフクラブ3のシャフトの長軸方向と直交する線分、すなわち第1線分51と直交する線分である。XYZ座標系における4つの頂点T1,T2,S1,S2の各座標を算出することによりシャフトプレーン30が特定される。T1,T2,S1,S2の各座標の算出方法については後述する。
As shown in FIG. 5, in this embodiment, the
また、図5に示すように、本実施形態では、ホーガンプレーン40は、第3線分52と、第2軸としての第2線分53と、を含み、T1,T2,H1,H2を4つの頂点とする仮想平面である。本実施形態では、第2線分53は、ユーザー2の両肩を結ぶ線分上の所定位置63(例えば、首の付け根の位置や左右いずれかの肩の位置など)とゴルフクラブ3のヘッド(打撃部)の位置62(打撃位置の一例)とを結ぶ線分である。ただし、第2線分53は、所定位置63とゴルフボール4の位置(打撃位置の一例)とを結ぶ線分であってもよい。XYZ座標系における4つの頂点T1,T2,H1,H2の各座標を算出することによりホーガンプレーン40が特定される。T1,T2,H1,H2の各座標の算出方法については後述する。
As shown in FIG. 5, in the present embodiment, the
1−2.傾き判定システムの構成
図6は、本実施形態の傾き判定システム1の構成例(センサーユニット10及び傾き判定装置20の構成例)を示す図である。図6に示すように、本実施形態では、センサーユニット10は、加速度センサー12、角速度センサー14、信号処理部16及び通信部18を含んで構成されている。
1-2. Configuration of Inclination Determination System FIG. 6 is a diagram illustrating a configuration example (configuration example of the
加速度センサー12(慣性センサーの一例)は、互いに交差する(理想的には直交する)3軸方向の各々に生じる加速度を計測し、計測した3軸加速度の大きさ及び向きに応じたデジタル信号(加速度データ)を出力する。 The acceleration sensor 12 (an example of an inertial sensor) measures acceleration generated in each of three axis directions that intersect each other (ideally orthogonal), and a digital signal (in accordance with the magnitude and direction of the measured three axis acceleration) Output acceleration data).
角速度センサー14(慣性センサーの一例)は、互いに交差する(理想的には直交する)3軸の各々の軸回りに生じる角速度を計測し、計測した3軸角速度の大きさ及び向きに応じたデジタル信号(角速度データ)を出力する。 The angular velocity sensor 14 (an example of an inertial sensor) measures an angular velocity generated around each of three axes that intersect each other (ideally orthogonally), and digital corresponding to the magnitude and direction of the measured three-axis angular velocity. A signal (angular velocity data) is output.
信号処理部16は、加速度センサー12と角速度センサー14から、それぞれ加速度データと角速度データを受け取って時刻情報を付して不図示の記憶部に記憶し、記憶した計測データ(加速度データと角速度データ)に時刻情報を付して通信用のフォーマットに合わせたパケットデータを生成し、通信部18に出力する。
The
加速度センサー12及び角速度センサー14は、それぞれ3軸が、センサーユニット10に対して定義される直交座標系(センサー座標系)の3軸(x軸、y軸、z軸)と一致するようにセンサーユニット10に取り付けられるのが理想的だが、実際には取り付け角の誤差が生じる。そこで、信号処理部16は、取り付け角誤差に応じてあらかじめ算出された補正パラメーターを用いて、加速度データ及び角速度データをxyz座標系のデータに変換する処理を行う。
The
さらに、信号処理部16は、加速度センサー12及び角速度センサー14の温度補正処理を行ってもよい。あるいは、加速度センサー12及び角速度センサー14に温度補正の機能が組み込まれていてもよい。
Further, the
なお、加速度センサー12と角速度センサー14は、アナログ信号を出力するものであってもよく、この場合は、信号処理部16が、加速度センサー12の出力信号と角速度センサー14の出力信号をそれぞれA/D変換して計測データ(加速度データと角速度データ)を生成し、これらを用いて通信用のパケットデータを生成すればよい。
The
通信部18は、信号処理部16から受け取ったパケットデータを傾き判定装置20に送信する処理や、傾き判定装置20から制御コマンドを受信して信号処理部16に送る処理等を行う。信号処理部16は、制御コマンドに応じた各種処理を行う。
The
傾き判定装置20(運動解析装置)は、処理部21、通信部22、操作部23、記憶部24、表示部25、音出力部26を含んで構成されている。
The inclination determination device 20 (motion analysis device) includes a
通信部22は、センサーユニット10から送信されたパケットデータを受信し、処理部21に送る処理や、処理部21からの制御コマンドをセンサーユニット10に送信する処理等を行う。
The
操作部23は、ユーザー2からの操作データを取得し、処理部21に送る処理を行う。操作部23は、例えば、タッチパネル型ディスプレイ、ボタン、キー、マイクなどであってもよい。
The
記憶部24は、例えば、ROM(Read Only Memory)やフラッシュROM、RAM(Random Access Memory)等の各種ICメモリーやハードディスクやメモリーカードなどの記録媒体等により構成される。
The
記憶部24は、処理部21が各種の計算処理や制御処理を行うためのプログラムや、アプリケーション機能を実現するための各種プログラムやデータ等を記憶している。特に、本実施形態では、記憶部24には、処理部21によって読み出され、傾き判定処理(運動解析処理)を実行するための傾き判定プログラム240(運動解析プログラム)が記憶されている。傾き判定プログラム240はあらかじめ不揮発性の記録媒体に記憶されていてもよいし、処理部21がネットワークを介してサーバーから傾き判定プログラム240を受信して記憶部24に記憶させてもよい。
The
また、本実施形態では、記憶部24には、ゴルフクラブ情報242、身体情報244、センサー装着位置情報246及び基準範囲情報248が記憶される。例えば、ユーザー2が、操作部23を操作して、図4(B)の入力画面から、使用するゴルフクラブ3のゴルフクラブ情報を入力し、入力されたゴルフクラブ情報をゴルフクラブ情報242としてもよい。あるいは、ユーザー2が、図3のS1において、ゴルフクラブ3の型番を入力(あるいは、型番リストから選択)し、記憶部24にあらかじめ記憶されている型番毎の仕様情報(例えば、シャフトの長さ、重心の位置、ライ角、フェース角、ロフト角等の情報など)のうち、入力された型番の仕様情報をゴルフクラブ情報242としてもよい。また、例えば、ユーザー2が、操作部23を操作して、図4(A)の入力画面から、身体情報を入力し、入力された身体情報を身体情報244としてもよい。また、例えば、図3のS1において、ユーザー2が操作部23を操作してセンサーユニット10の装着位置とゴルフクラブ3のグリップとの間の距離を入力し、入力された距離の情報をセンサー装着位置情報246としてもよい。あるいは、センサーユニット10を決められた所定位置(例えば、グリップから20cmの距離など)に装着するものとして、当該所定位置の情報がセンサー装着位置情報246としてあらかじめ記憶されていてもよい。
In the present embodiment, the
基準範囲情報248は、ユーザーのアドレス時のゴルフクラブの傾斜角(水平面(XY平面)あるいは鉛直面(XZ平面)に対する傾き)として適正な範囲(基準範囲)を規定する情報であり、例えば、ユーザーの身長と当該ユーザーが使用するゴルフクラブのクラブ長(シャフトの長さ)との組み合わせに応じて各々の基準範囲を規定するテーブル情報を含んでもよい。
The
図7は、基準範囲情報248に含まれる、ユーザーのアドレス時におけるゴルフクラブの傾斜角θ(水平面(XY平面)に対する傾き)の基準範囲の上限値θMAXを規定するテーブル情報(ルックアップテーブル)の一例を示す図である。図7において、列方向は身長あるいは股下高(股下の長さ)(単位:cm)であり、行方向はクラブ長(単位:cm)である。本実施形態では、ゴルフクラブのグリップエンドの地面からの高さが股下高
(ほぼ脚の長さ)と一致する時の傾斜角θを上限値θMAXとしている。そして、股下高は、身長を変数として(より正確には、性別、年齢、国籍なども変数として)、統計データに基づく相関式によって計算され、クラブ長をa、股下高をbとすると、上限値θMAXは、arcsin(b/a)で計算される。図7のルックアップテーブルでは、例えば、図4(A)に示したように、身長が170cm(かつ、男性、36歳、日本人)のユーザー2は、股下高が77.049cmと計算され、図4(B)に示したように、クラブ長が115cmのゴルフクラブ3を使用する場合、上限値θMAXは42.1°であることが規定されている。なお、クラブ長aが股下高bよりも小さくなるような(上限値θMAXが90°を超える)アドレス姿勢は考えられないので、図7の例では、クラブ長aが股下高bよりも小さくなる組み合わせでの上限値θMAXを90°としている。
FIG. 7 is table information (lookup table) that defines the upper limit value θ MAX of the reference range of the golf club inclination angle θ (inclination with respect to the horizontal plane (XY plane)) included in the
図8は、基準範囲情報248に含まれる、ユーザーのアドレス時におけるゴルフクラブの傾斜角θ(水平面(XY平面)に対する傾き)の基準範囲の下限値θMINを規定するテーブル情報(ルックアップテーブル)の一例を示す図である。図8において、列方向は身長あるいは膝下高(膝下の長さ)(単位:cm)であり、行方向はクラブ長(単位:cm)である。本実施形態では、ゴルフクラブのグリップエンドの地面からの高さが膝下高と一致する時の傾斜角θを下限値θMINとしている。そして、膝下高は、身長を変数として(より正確には、性別、年齢、国籍なども変数として)、統計データに基づく相関式によって計算され、クラブ長をa、膝下高をcとすると、下限値θMINは、arcsin(c/a)で計算される。図8のルックアップテーブルでは、例えば、図4(A)に示したように、身長が170cm(かつ、男性、36歳、日本人)のユーザー2は、膝下高が46.491cmと計算され、図4(B)に示したように、クラブ長が115cmのゴルフクラブ3を使用する場合、下限値θMINは23.8°であることが規定されている。
FIG. 8 is table information (lookup table) that defines the lower limit value θ MIN of the reference range of the golf club inclination angle θ (inclination with respect to the horizontal plane (XY plane)) at the time of the user's address, which is included in the
また、記憶部24は、処理部21の作業領域として用いられ、操作部23から入力されたデータ、処理部21が各種プログラムに従って実行した演算結果等を一時的に記憶する。さらに、記憶部24は、処理部21の処理により生成されたデータのうち、長期的な保存が必要なデータを記憶してもよい。
The
表示部25は、処理部21の処理結果を文字、グラフ、表、アニメーション、その他の画像として表示するものである。表示部25は、例えば、CRT、LCD、タッチパネル型ディスプレイ、HMD(ヘッドマウントディスプレイ)などであってもよい。なお、1つのタッチパネル型ディスプレイで操作部23と表示部25の機能を実現するようにしてもよい。
The
音出力部26は、処理部21の処理結果を音声やブザー音等の音として出力するものである。音出力部26は、例えば、スピーカーやブザーなどであってもよい。
The
処理部21は、各種プログラムに従って、センサーユニット10に制御コマンドを送信する処理や、センサーユニット10から通信部22を介して受信したデータに対する各種の計算処理や、その他の各種の制御処理を行う。特に、本実施形態では、処理部21は、傾き判定プログラム240を実行することにより、データ取得部210、傾き算出部211、判定部212、第1特定部213、第2特定部214、運動解析部215、画像データ生成部216、記憶処理部217、表示処理部218及び音出力処理部219として機能する。
The
データ取得部210は、通信部22がセンサーユニット10から受信したパケットデータを受け取り、受け取ったパケットデータから時刻情報及び計測データを取得し、記憶処理部217に送る処理を行う。
The
記憶処理部217は、データ取得部210から時刻情報と計測データを受け取り、これらを対応づけて記憶部24に記憶させる処理を行う。
The
傾き算出部211は、センサーユニット10が出力する計測データを用いて、ユーザー2のスイング開始前のゴルフクラブ3の傾きを算出する処理を行う。本実施形態では、ユーザー2が図3のS4の動作を行い、傾き算出部211は、加速度センサー12が計測した加速度データの変化量が所定時間継続して閾値を超えない場合に、当該所定時間内の加速度データを用いて、ゴルフクラブ3のシャフトの傾斜角θを計算する。
The
判定部212は、傾き算出部211が算出したゴルフクラブ3の傾き(傾斜角θ)が、ゴルフクラブ情報242と身体情報244とに基づいて決定される基準範囲に含まれるか否かを判定する。具体的には、判定部212は、基準範囲情報248(例えば、図7のルックアップテーブル及び図8のルックアップテーブル)を参照し、ゴルフクラブ情報242に含まれるクラブ長の情報と身体情報244に含まれる身長などの情報に応じた、ゴルフクラブ3の傾斜角θの基準範囲を決定し、傾き算出部211が算出したゴルフクラブ3の傾斜角θが当該基準範囲に含まれるか否かを判定する。例えば、ユーザー2が図3のS1において、図4(A)に示す身体情報と図4(B)に示すゴルフクラブ情報を入力した場合、判定部212は、図7のルックアップテーブル及び図8のルックアップテーブルに基づき、ゴルフクラブ3の傾斜角θの基準範囲を23.8°以上42.1°以下の範囲に決定し、傾き算出部211が算出したゴルフクラブ3の傾斜角θが23.8°以上42.1°以下の範囲に含まれるか否かを判定する。
The determination unit 212 determines whether or not the inclination (inclination angle θ) of the golf club 3 calculated by the
第1特定部213は、判定部212によってゴルフクラブ3の傾き(傾斜角θ)が基準範囲に含まれると判定された場合に、センサーユニット10が出力し、記憶部24に記憶された計測データを用いて、ゴルフクラブ3の長軸方向に沿った第1軸である第1線分51(図5参照)を特定する処理を行う。具体的には、第1特定部213は、ゴルフクラブ3の傾斜角θが基準範囲に含まれている時の計測データを用いて、第1線分51を特定する。例えば、第1特定部213は、当該計測データを用いて、ゴルフクラブ3のシャフトの傾斜角を計算し、計算した傾斜角とゴルフクラブ情報242に含まれるゴルフクラブ3の長さ(シャフトの長さ)の情報とを用いて、ゴルフクラブ3のグリップエンドの位置62の座標を計算し、ゴルフクラブ3のヘッド(打撃部)の位置61(原点O)とグリップエンドの位置62とを結ぶ線分を第1線分51として特定してもよい。
When the determination unit 212 determines that the inclination (inclination angle θ) of the golf club 3 is included in the reference range, the first specifying
さらに、第1特定部213は、第1線分51と、打球の目標方向を表す第3線分52と、を含むシャフトプレーン(第1仮想平面)30(図5参照)を特定する処理を行う。第1特定部213は、第1線分51の長さと身体情報244に基づくユーザー2の腕の長さとを用いて、シャフトプレーン30の幅を計算してもよい。
Furthermore, the 1st specific |
第2特定部214は、判定部212によってゴルフクラブ3の傾きが基準範囲に含まれると判定された場合に、センサーユニット10が出力し、記憶部24に記憶された計測データを用いて、ユーザー2の頭部と胸部の間(例えば、両肩を結ぶ線分上)の所定位置63と打撃位置とを結ぶ第2軸である第2線分53(図5参照)を特定する処理を行う。具体的には、第2特定部214は、ゴルフクラブ3の傾きが基準範囲に含まれている時の計測データを用いて、第2線分53を特定する。例えば、第2特定部214は、当該計測データと身体情報244とを用いて、所定位置63を推定し、推定した所定位置63とゴルフクラブ3のヘッド(打撃部)の位置62(原点O)とを結ぶ線分を第2線分53として特定してもよい。例えば、第2特定部214は、第1特定部213が計算したグリップエンドの位置62の座標と、身体情報244に基づくユーザー2の腕の長さとを用いて、所定位置63を推定してもよい。あるいは、第2特定部214が、ゴルフクラブ3の傾きが
基準範囲に含まれている時の計測データを用いて、ゴルフクラブ3のグリップエンドの位置62の座標を計算してもよい。この場合は、第1特定部213は、第2特定部214が計算したグリップエンドの位置62の座標を用いて、第1線分51を特定してもよい。
The second specifying
さらに、第2特定部214は、第2線分53と、第3線分52と、を含むホーガンプレーン(第2仮想平面)40(図5参照)を特定する処理を行う。第2特定部214は、第1線分51の長さと身体情報244に基づくユーザー2の腕の長さとを用いて、ホーガンプレーン40の幅を計算してもよい。
Further, the second specifying
運動解析部215は、センサーユニット10が出力する計測データを用いて、ユーザー2のスイング運動を解析する処理を行う。具体的には、運動解析部215は、まず、記憶部24に記憶された、ユーザー2の静止時(アドレス時)の計測データ(加速度データ及び角速度データ)を用いて、計測データに含まれるオフセット量を計算する。次に、運動解析部215は、記憶部24に記憶された、スイング開始後の計測データからオフセット量を減算してバイアス補正し、バイアス補正された計測データを用いて、ユーザー2のスイング動作中(図3のステップS6の動作中)のセンサーユニット10の位置及び姿勢を計算する。
The
例えば、運動解析部215は、加速度センサー12が計測した加速度データ、ゴルフクラブ情報242及びセンサー装着位置情報246を用いて、XYZ座標系(グローバル座標系)におけるユーザー2の静止時(アドレス時)のセンサーユニット10の位置(初期位置)を計算し、その後の加速度データを積分してセンサーユニット10の初期位置からの位置の変化を時系列に計算する。ユーザー2は図3のステップS4の動作を行うので、センサーユニット10の初期位置のX座標は0である。さらに、図2に示したように、センサーユニット10のy軸はゴルフクラブ3のシャフトの長軸方向と一致し、ユーザー2の静止時には、加速度センサー12は重力加速度のみを計測するので、運動解析部215は、y軸加速度データを用いてシャフトの傾斜角を計算することができる。そして、運動解析部215は、ゴルフクラブ情報242(シャフトの長さ)とセンサー装着位置情報246(グリップからの距離)からセンサーユニット10とヘッドとの距離LSHを求め、ヘッドの位置を原点(0,0,0)として、シャフトの傾斜角により特定されるセンサーユニット10のy軸の負の方向に原点から距離LSHの位置をセンサーユニット10の初期位置とする。あるいは、運動解析部215は、第1特定部213又は第2特定部214が計算したゴルフクラブ3のグリップエンドの位置62の座標とセンサー装着位置情報246(グリップエンドからの距離)とを用いて、センサーユニット10の初期位置の座標を計算してもよい。
For example, the
また、運動解析部215は、加速度センサー12が計測した加速度データを用いて、XYZ座標系(グローバル座標系)におけるユーザー2の静止時(アドレス時)のセンサーユニット10の姿勢(初期姿勢)を計算し、その後の角速度センサー14が計測した角速度データを用いた回転演算を行ってセンサーユニット10の初期姿勢からの姿勢の変化を時系列に計算する。センサーユニット10の姿勢は、例えば、X軸、Y軸、Z軸回りの回転角(ロール角、ピッチ角、ヨー角)、クオータ二オン(四元数)などで表現することができる。ユーザー2の静止時には、加速度センサー12は重力加速度のみを計測するので、運動解析部215は、3軸加速度データを用いて、センサーユニット10のx軸、y軸、z軸の各々と重力方向とのなす角度を特定することができる。さらに、ユーザー2は図3のステップS4の動作を行うので、ユーザー2の静止時において、センサーユニット10のy軸はYZ平面上にあるため、運動解析部215は、センサーユニット10の初期姿勢を特定することができる。
Further, the
そして、運動解析部215は、スイングの各時刻におけるセンサーユニット10の位置
から、当該時刻におけるセンサーユニット10の姿勢から特定されるセンサーユニット10のy軸の正の方向に距離LSHの位置を当該時刻におけるヘッドの位置とする。
Then, the
また、運動解析部215は、スイングの各時刻におけるセンサーユニット10の位置から、当該時刻におけるセンサーユニット10の姿勢により特定されるセンサーユニット10のy軸の負の方向に、センサー装着位置情報246(グリップからの距離)により特定されるセンサーユニット10とグリップとの距離LSGの位置を当該時刻におけるグリップの位置とする。
In addition, the
なお、センサーユニット10の信号処理部16が、計測データのオフセット量を計算し、計測データのバイアス補正を行うようにしてもよいし、加速度センサー12及び角速度センサー14にバイアス補正の機能が組み込まれていてもよい。これらの場合は、運動解析部215による計測データのバイアス補正が不要となる。
The
また、運動解析部215は、記憶部24に記憶された時刻情報と計測データを用いて、ユーザー2のスイング動作の期間において打球したタイミング(インパクトのタイミング)を検出する。例えば、運動解析部215は、センサーユニット10が出力する計測データ(加速度データ又は角速度データ)の合成値を計算し、当該合成値に基づいてユーザー2が打球したタイミング(時刻)を特定する。
In addition, the
また、運動解析部215は、スイング(特に、ゴルフクラブ3がトップの位置にある時から打球時(インパクト時)までのダウンスイング)におけるゴルフクラブ3の軌跡(ゴルフクラブ3のヘッドの位置とグリップの位置の時系列情報)が、シャフトプレーン30とホーガンプレーン40との間の空間(Vゾーン)に含まれるか否かを判定し、判定結果に基づいてユーザー2のスイングの評価情報を生成する。
In addition, the
さらに、運動解析部215は、センサーユニット10の計測データに基づき、バックスイングからフォロースルーまでのスイングのリズム、ヘッドスピード、打球時の入射角(クラブパス)やフェース角、シャフトローテーション(スイング中のフェース角の変化量)、ゴルフクラブ3の減速率、あるいは、ユーザー2が複数回のスイングを行った場合のこれら各情報のばらつき等を解析してもよい。
Furthermore, based on the measurement data of the
画像データ生成部216は、表示部25に表示される運動解析結果の画像に対応する画像データを生成する処理を行う。特に、本実施形態では、画像データ生成部216は、第1特定部213が特定したシャフトプレーン30と、第2特定部214が特定したホーガンプレーン40と、運動解析部215が計算したユーザー2のスイング(特に、ダウンスイング)におけるゴルフクラブ3の軌跡と、を含む画像データを生成する。例えば、画像データ生成部216は、図5に示したT1,T2,S1,S2の各座標の情報をもとに、T1,T2,S1,S2を4つの頂点とするシャフトプレーン30のポリゴンデータを生成し、T1,T2,H1,H2の各座標の情報をもとに、T1,T2,H1,H2を4つの頂点とするホーガンプレーン40のポリゴンデータを生成する。また、画像データ生成部216は、ユーザー2のダウンスイング時のゴルフクラブ3の軌跡を表す曲線データを生成する。そして、画像データ生成部216は、シャフトプレーン30のポリゴンデータ、ホーガンプレーン40のポリゴンデータ及びゴルフクラブ3の軌跡を表す曲線データを含む画像データを生成する。
The image
記憶処理部217は、記憶部24に対する各種プログラムや各種データのリード/ライト処理を行う。記憶処理部217は、データ取得部210から受け取った時刻情報と計測データを対応づけて記憶部24に記憶させる処理の他、第1特定部213、第2特定部214及び運動解析部215が算出した各種の情報等を記憶部24に記憶させる処理も行う
。
The
表示処理部218は、表示部25に対して各種の画像(画像データ生成部216が生成した画像データに対応する画像の他、文字や記号等も含む)を表示させる処理を行う。例えば、表示処理部218は、ユーザー2のスイング運動が終了した後、自動的に、あるいは、ユーザー2の入力操作に応じて画像データ生成部216が生成した画像データに対応する画像や運動解析部215による解析結果を示す文字等を表示部25に表示させる。あるいは、センサーユニット10に表示部を設けておいて、表示処理部218は、通信部22を介してセンサーユニット10に画像データを送信し、センサーユニット10の表示部に各種の画像や文字等を表示させてもよい。
The
音出力処理部219は、音出力部26に対して各種の音(音声やブザー音等も含む)を出力させる処理を行う。例えば、音出力処理部219は、ユーザー2のスイング運動が終了した後、自動的に、あるいは、所定の入力操作が行われたときに、記憶部24に記憶されている各種の情報を読み出して音出力部26に運動解析用の音や音声を出力させてもよい。あるいは、センサーユニット10に音出力部を設けておいて、音出力処理部219は、通信部22を介してセンサーユニット10に各種の音データや音声データを送信し、センサーユニット10の音出力部に各種の音や音声を出力させてもよい。
The sound
特に、本実施形態では、音出力処理部219は、判定部212によってゴルフクラブ3の傾きが基準範囲に含まれると判定された場合に、スイングの開始の許可を通知する音声データを生成し、音出力部26を通知部として機能させて、ユーザー2にスイングの開始の許可を音声で通知する。あるいは、画像データ生成部216が、判定部212によってゴルフクラブ3の傾きが基準範囲に含まれると判定された場合に、スイングの開始の許可を通知する画像や文字等のデータを生成し、表示処理部218が、表示部25を通知部として機能させて、ユーザー2にスイングの開始の許可を画像や文字等で通知してもよい。
In particular, in the present embodiment, the sound
なお、傾き判定装置20あるいはセンサーユニット10に振動機構を設けておいて、当該振動機構により各種の情報を振動情報に変換してユーザー2に通知してもよい。
Note that a vibration mechanism may be provided in the
1−3.傾き判定装置の処理
[運動解析処理]
図9は、本実施形態における処理部21による運動解析処理の手順の一部を示すフローチャート図である。処理部21は、記憶部24に記憶されている傾き判定プログラム240(運動解析プログラム)を実行することにより、図9のフローチャートの手順で運動解析処理の一部の処理を実行する。以下、図9のフローチャートについて説明する。
1-3. Inclination determination device processing [Motion analysis processing]
FIG. 9 is a flowchart showing a part of the procedure of the motion analysis process by the
まず、処理部21は、センサーユニット10から計測データの取得を開始する(S10)。
First, the
次に、ユーザー2の静止動作(アドレス動作)(図3のステップS4の動作)により、処理部21は、センサーユニット10から取得した計測データを用いて、所定時間継続して静止状態を検出し(S12のY)、当該所定時間内に取得した計測データを用いて、ゴルフクラブ3の傾き(傾斜角θ)を算出する(S14)。
Next, the
次に、処理部21は、ゴルフクラブ情報242、身体情報244及び基準範囲情報248を用いて、工程S14で算出したゴルフクラブ3の傾き(傾斜角θ)が基準範囲に含まれるか否かを判定する(S16)。
Next, the
そして、処理部21は、ゴルフクラブ3の傾き(傾斜角θ)が基準範囲に含まれない場
合は(S16のN)、工程S12の処理に戻り、基準範囲に含まれる場合は(S16のY)、ユーザー2にスイング開始の許可を通知する(S18)。処理部21は、例えば、所定の画像や音を出力し、あるいは、センサーユニット10にLEDを設けておいて当該LEDを点灯させる等して、ユーザー2にスイング開始の許可を通知し、ユーザー2は、この通知を確認した後にスイングを開始する。
Then, when the inclination (inclination angle θ) of the golf club 3 is not included in the reference range (N in S16), the
次に、処理部21は、ユーザー2のスイング動作中にリアルタイムに、あるいはスイング終了後に、工程S20以降の処理を行う。
Next, the
まず、処理部21は、センサーユニット10から取得した計測データ(ユーザー2の静止動作(アドレス動作)における計測データ)を用いて、センサーユニット10の初期位置と初期姿勢を計算する(S20)。
First, the
次に、処理部21は、センサーユニット10から取得した計測データを用いて、ユーザー2が打球したタイミング(インパクトのタイミング)を検出する(S22)。
Next, the
また、処理部21は、工程S22の処理と並行して、あるいは前後して、ユーザー2のスイング動作中のセンサーユニット10の位置と姿勢を計算する(S24)。
Further, the
次に、処理部21は、工程S22で検出したインパクトのタイミングと、工程S24で計算したセンサーユニット10の位置及び姿勢とを用いて、ユーザー2のダウンスイング時のゴルフクラブ3の軌跡を計算する(S26)。
Next, the
次に、処理部21は、センサーユニット10から取得した計測データ(ゴルフクラブ3の傾きが基準範囲に含まれると判定された期間の計測データ)とゴルフクラブ情報242とを用いて、シャフトプレーン30を特定する(S28)。
Next, the
次に、処理部21は、センサーユニット10から取得した計測データ(ゴルフクラブ3の傾きが基準範囲に含まれると判定された期間の計測データ)と身体情報244とを用いて、ホーガンプレーン40を特定する(S30)。
Next, the
次に、処理部21は、工程S28で特定したシャフトプレーン30、工程S30で特定したホーガンプレーン40、及び、工程S26で計算したダウンスイング時のゴルフクラブの軌跡を含む画像データを生成し、表示部25に表示させる(S32)。
Next, the
また、処理部21は、ダウンスイング時のゴルフクラブ3の軌跡がVゾーン(シャフトプレーン30とホーガンプレーン40との間の空間)に含まれるか否かを判定する(S34)。
Further, the
そして、処理部21は、工程S34の判定結果を用いて、ユーザー2のスイングの評価情報を生成して表示部25に表示させ(S36)、処理を終了する。
And the
なお、図9のフローチャートにおいて、可能な範囲で各工程の順番を適宜変えてもよい。 In the flowchart of FIG. 9, the order of each process may be appropriately changed within a possible range.
[シャフトプレーン(第1仮想平面)特定処理]
図10は、本実施形態における処理部21によるシャフトプレーン(第1仮想平面)を特定する処理(図9の工程S28の処理)の手順の一例を示すフローチャート図である。以下、図10のフローチャートについて説明する。
[Shaft plane (first virtual plane) identification process]
FIG. 10 is a flowchart illustrating an example of a procedure of a process of specifying a shaft plane (first virtual plane) by the
まず、処理部21は、図5に示したように、ゴルフクラブ3のヘッドの位置61をXYZ座標系(グローバル座標系)の原点O(0,0,0)として、ゴルフクラブ3の傾きが基準範囲に含まれると判定された期間にセンサーユニット10が計測した加速度データとゴルフクラブ情報242とを用いて、グリップエンドの位置62の座標(0,GY,GZ)を計算する(S100)。図11は、ユーザー2の静止時(アドレス時)におけるゴルフクラブ3とセンサーユニット10をX軸の負側から見た平面図であり、ゴルフクラブ3のヘッドの位置61が原点O(0,0,0)であり、グリップエンドの位置62の座標は(0,GY,GZ)である。図11に示すように、ユーザー2の静止時にセンサーユニット10には重力加速度Gがかかるので、y軸加速度y(0)とゴルフクラブ3のシャフトの傾斜角(シャフトの長軸と水平面(XY平面)とのなす角)αとの関係は式(1)で表される。
First, as shown in FIG. 5, the

従って、ゴルフクラブ情報242に含まれるゴルフクラブ3のシャフトの長さをL1とすると、GY,GZは、シャフトの長さL1と傾斜角αを用いて、式(2)及び式(3)でそれぞれ計算される。
Therefore, when the length of the shaft of the golf club 3 included in the
![]()
![]()
![]()
![]()
次に、処理部21は、ゴルフクラブ3のグリップエンドの位置62の座標(0,GY,GZ)にスケールファクターSを乗算し、シャフトプレーン30の頂点S1と頂点S2の中点S3の座標(0,SY,SZ)を計算する(S110)。すなわち、SY及びSZは、式(4)及び式(5)により計算される。
Next, the
![]()
![]()
![]()
![]()
図12は、図5のシャフトプレーン30をYZ平面で切った断面図をX軸の負側から見た図である。図12に示すように、頂点S1と頂点S2の中点S3と原点Oとを結ぶ線分の長さ(シャフトプレーン30のX軸と直交する方向の幅)は、第1線分51の長さL1のS倍となる。このスケールファクターSは、ユーザー2のスイング動作中のゴルフクラ
ブ3の軌跡がシャフトプレーン30に収まるような値に設定される。例えば、ユーザー2の腕の長さをL2とすると、シャフトプレーン30のX軸と直交する方向の幅S×L1が、シャフトの長さL1と腕の長さL2の和の2倍となるように、スケールファクターSを式(6)のように設定してもよい。
12 is a cross-sectional view of the
また、ユーザー2の腕の長さL2は、ユーザー2の身長L0と相関があり、統計情報に基づき、例えば、ユーザー2が男性の場合は式(7)のような相関式で表され、ユーザー2が女性の場合は式(8)のような相関式で表される。
The arm length L 2 of the user 2 has a correlation with the height L 0 of the
従って、ユーザーの腕の長さL2は、身体情報244に含まれるユーザー2の身長L0と性別とを用いて、式(7)又は式(8)により算出される。
Thus, the user's arm length L 2 is, by using the height L 0 and
次に、処理部21は、工程S110で計算した中点S3の座標(0,SY,SZ)及びシャフトプレーン30のX軸方向の幅(第3線分52の長さ)TLを用いて、シャフトプレーン30の頂点T1の座標(−TL/2,0,0)、頂点T2の座標(TL/2,0,0)、頂点S1の座標(−TL/2,SY,SZ)、S2の座標(TL/2,SY,SZ)を計算する(S120)。X軸方向の幅TLは、ユーザー2のスイング動作中のゴルフクラブ3の軌跡がシャフトプレーン30に収まるような値に設定される。例えば、X軸方向の幅TLを、X軸と直交する方向の幅S×L1と同じ、すなわち、シャフトの長さL1と腕の長さL2の和の2倍に設定してもよい。
Next, the
このように計算された4つの頂点T1,T2,S1,S2の座標により、シャフトプレーン30が特定される。
The
[ホーガンプレーン(第2仮想平面)特定処理]
図13は、本実施形態における処理部21によるホーガンプレーン(第2仮想平面)を特定する処理(図9の工程S30の処理)の手順の一例を示すフローチャート図である。以下、図13のフローチャートについて説明する。
[Hogan plane (second virtual plane) identification process]
FIG. 13 is a flowchart illustrating an example of a procedure of a process (process S30 in FIG. 9) for specifying a Hogan plane (second virtual plane) by the
まず、処理部21は、図10の工程S100で計算したゴルフクラブ3のグリップエンドの位置62の座標(0,GY,GZ)及びユーザー2の身体情報244を用いて、ユーザー2の両肩を結ぶ線分上の所定位置63を推定し、その座標(AX,AY,AZ)を計算する(S200)。
First, the
図14は、図5のホーガンプレーン40をYZ平面で切った断面図をX軸の負側から見
た図である。図14では、ユーザー2の両肩を結ぶ線分の中点を所定位置63としており、所定位置63はYZ平面上に存在する。従って、所定位置63のX座標AXは0である。そして、図14に示すように、処理部21は、ゴルフクラブ3のグリップエンドの位置62をZ軸の正方向にユーザー2の腕の長さL2だけ移動させた位置が所定位置63であると推定する。従って、所定位置63のY座標AYはグリップエンドの位置62のY座標GYと同じであり、所定位置63のZ座標AZは、式(9)のように、グリップエンドの位置62のZ座標GZとユーザー2の腕の長さL2の和として計算される。
14 is a cross-sectional view of the
![]()
![]()
ユーザーの腕の長さL2は、身体情報244に含まれるユーザー2の身長L0と性別とを用いて、式(7)又は式(8)により算出される。
The length L 2 of the user's arm, with the height L 0 and
次に、処理部21は、所定位置63のY座標AY及びZ座標AZにそれぞれスケールファクターHを乗算し、ホーガンプレーン40の頂点H1と頂点H2の中点H3の座標(0,HY,HZ)を計算する(S210)。すなわち、HY及びHZは、式(10)及び式(11)により計算される。
Next, the
![]()
![]()
図14に示すように、頂点H1と頂点H2の中点H3と原点Oとを結ぶ線分の長さ(ホーガンプレーン40のX軸と直交する方向の幅)は、第2線分53の長さL3のH倍となる。このスケールファクターHは、ユーザー2のスイング動作中のゴルフクラブ3の軌跡がホーガンプレーン40に収まるような値に設定される。例えば、ホーガンプレーン40は、シャフトプレーン30と同じ形及び大きさとしてもよい。この場合、ホーガンプレーン40のX軸と直交する方向の幅H×L3が、シャフトプレーン30のX軸と直交する方向の幅S×L1と一致し、ゴルフクラブ3のシャフトの長さL1とユーザー2の腕の長さL2の和の2倍となるから、スケールファクターHを式(12)のように設定してもよい。
As shown in FIG. 14, the length of the line segment connecting the midpoint H3 of the vertex H1 and the vertex H2 and the origin O (the width in the direction perpendicular to the X axis of the Hogan plane 40) is the length of the
また、第2線分53の長さL3は、所定位置63のY座標AY及びZ座標AZを用いて、式(13)により計算される。
Further, the length L 3 of the
次に、処理部21は、工程S210で計算した中点H3の座標(0,HY,HZ)及びホーガンプレーン40のX軸方向の幅(第3線分52の長さ)TLを用いて、ホーガンプレーン40の頂点T1の座標(−TL/2,0,0)、頂点T2の座標(TL/2,0,0)、頂点H1の座標(−TL/2,HY,HZ)、H2の座標(TL/2,HY,HZ)を計算する(S220)。X軸方向の幅TLは、ユーザー2のスイング動作中のゴルフクラブ3の軌跡がホーガンプレーン40に収まるような値に設定される。本実施形態では、ホーガンプレーン40のX軸方向の幅TLは、シャフトプレーン30のX軸方向の幅と同じであるから、上記の通り、シャフトの長さL1と腕の長さL2の和の2倍に設定してもよい。
Next, the
このように計算された4つの頂点T1,T2,H1,H2の座標により、ホーガンプレーン40が特定される。
The
[インパクト検出処理]
図15は、ユーザー2が打球したタイミングを検出する処理(図9の工程S22の処理)の手順の一例を示すフローチャート図である。以下、図15のフローチャートについて説明する。
[Impact detection process]
FIG. 15 is a flowchart illustrating an example of a procedure of a process for detecting the timing at which the
まず、処理部21は、取得した角速度データ(時刻t毎の角速度データ)を用いて各時刻tでの角速度の合成値n0(t)の値を計算する(S300)。例えば、時刻tでの角速度データをx(t)、y(t)、z(t)とすると、角速度の合成値n0(t)は、次の式(14)で計算される。
First, the
次に、処理部21は、各時刻tでの角速度の合成値n0(t)を所定範囲に正規化(スケール変換)した合成値n(t)に変換する(S310)。例えば、計測データの取得期間における角速度の合成値の最大値をmax(n0)とすると、次の式(15)により、角速度の合成値n0(t)が0〜100の範囲に正規化した合成値n(t)に変換される。
Next, the
次に、処理部21は、各時刻tでの正規化後の合成値n(t)の微分dn(t)を計算する(S320)。例えば、3軸角速度データの計測周期をΔtとすると、時刻tでの角速度の合成値の微分(差分)dn(t)は次の式(16)で計算される。
Next, the
![]()
![]()
最後に、処理部21は、合成値の微分dn(t)の値が最大となる時刻と最小となる時刻のうち、先の時刻を打球のタイミングとして検出する(S330)。通常のゴルフスイングでは、打球の瞬間にスイング速度が最大になると考えられる。そして、スイング速度に応じて角速度の合成値の値も変化すると考えられるので、一連のスイング動作の中で角速度の合成値の微分値が最大又は最小となるタイミング(すなわち、角速度の合成値の微分値が正の最大値又は負の最小値になるタイミング)を打球(インパクト)のタイミングとして捉えることができる。なお、打球によりゴルフクラブ3が振動するため、角速度の合成値の微分値が最大となるタイミングと最小となるタイミングが対になって生じると考えられるが、そのうちの先のタイミングが打球の瞬間と考えられる。
Finally, the
なお、ユーザー2がスイング動作を行う場合、トップ位置でゴルフクラブを静止し、ダウンスイングを行い、打球し、フォロースルーを行うといった一連のリズムが想定される。従って、処理部21は、図15のフローチャートに従って、ユーザー2が打球したタイミングの候補を検出し、検出したタイミングの前後の計測データがこのリズムとマッチするか否かを判定し、マッチする場合には、検出したタイミングをユーザー2が打球したタイミングとして確定し、マッチしない場合には、次の候補を検出するようにしてもよい。
When the
また、図15のフローチャートでは、処理部21は、3軸角速度データを用いて打球のタイミングを検出しているが、3軸加速度データを用いて、同様に打球のタイミングを検出することもできる。
In the flowchart of FIG. 15, the
1−4.スイング評価
図16は、図5のシャフトプレーン30及びホーガンプレーン40をX軸の負側から見た図(YZ平面に投影した図)である。図16に示すように、ユーザー2のダウンスイング時のゴルフクラブ3の軌跡のすべてが、シャフトプレーン30とホーガンプレーン40との間の空間であるVゾーンに含まれる場合はストレート系の打球となる可能性が高い。一方、ユーザー2のダウンスイング時のゴルフクラブ3の軌跡の一部が、Vゾーンよりも低い空間に含まれる場合はフック系の打球となり、Vゾーンよりも高い空間に含まれる場合はスライス系の打球となる可能性が高い。そこで、例えば、処理部21は、図9の工程S34において、ユーザー2のダウンスイング時のゴルフクラブ3の軌跡のすべてがVゾーンに含まれるか否かを判定してもよい。そして、処理部21は、図9の工程S36において、ダウンスイング時のゴルフクラブ3の軌跡のすべてがVゾーンに含まれていれば適正なスイングと評価し、ダウンスイング時のゴルフクラブ3の軌跡の一部がVゾーンに含まれていなければ、打球がフック系あるいはスライス系となる不適正なスイングと評価してもよい。表示する際には、プレーンで表示しなくても良く、図16のようにシャフトプレーン30の第1線分51とホーガンプレーン40の第2線分53のみを表示させ、スイングを評価しても良い。
1-4. Swing Evaluation FIG. 16 is a diagram (projected on the YZ plane) of the
図17は、処理部21が図9の工程S32において生成し、表示部25に表示させる画像の一例である。図17に示す画像300は、シャフトプレーン30を表すポリゴン301、ホーガンプレーン40を表すポリゴン302、及び、ユーザー2のダウンスイング時のゴルフクラブ3の軌跡を表す曲線303を含んでいる。図17に示す画像300では、曲線303のすべてがポリゴン302とポリゴン303との間の空間であるVゾーンに含まれている。従って、ユーザー2は、この画像300を視認することで、自分のスイングが適正であることを確認することができる。また、処理部21は、図17に示す画像30
0(曲線303のすべてがVゾーンに含まれる画像)を表示部25に表示させる場合は、図9の工程S36において、ユーザー2のスイングが適正であると評価し、当該評価結果の情報を画像300とともに表示部25に表示させてもよい。
FIG. 17 is an example of an image generated by the
In the case where 0 (an image in which all of the
なお、図17に示す画像300は、静止画であってもよいし、動画であってもよい。また、画像300は、ユーザー2の操作に応じて表示角度(画像300を見る視点)を変えることが可能な3次元画像であってもよい。
Note that the
1−5.効果
本実施形態によれば、ユーザー2がスイングを開始する前に適正なドレス姿勢をとった場合には、ゴルフクラブ3やユーザー2に応じてゴルフクラブ3の傾き(傾斜角θ)の適正な範囲が決まることに着目し、傾き判定装置20は、スイング開始前の傾斜角θが、ゴルフクラブ情報242と身体情報244とに基づいて決定される基準範囲に含まれるか否かを判定する。従って、本実施形態によれば、ユーザーの運動開始前の運動器具の傾きが適正な範囲に含まれるか否かを判定することができる。特に、本実施形態によれば、傾き判定装置20は、ゴルフクラブ3の長さやユーザー2の身長、性別、年齢、国籍等に応じてより正確なゴルフクラブ3の傾き(傾斜角θ)の基準範囲を設定することにより、ユーザーの運動開始前の運動器具の傾きが適正な範囲に含まれるか否かをより正確に判定することができる。
1-5. Effect According to the present embodiment, when the
そして、本実施形態によれば、傾き判定装置20は、ユーザーの運動開始前の運動器具の傾きが適正な範囲に含まれる場合のみ、ユーザー2にスイング開始の許可を通知するので、ユーザー2は、適正なアドレス姿勢がとれたか否かを確認し、より良いスイングを行うことができる。
And according to this embodiment, since the
また、本実施形態によれば、傾き判定装置20は、ユーザー2が、計測開始操作を行った後にゴルフクラブ3を壁に立て掛けた場合やアドレス姿勢をとる前に静止した場合などにおいて、所定時間計測して静止を検出しても、ゴルフクラブ3の傾き(傾斜角θ)が基準範囲に含まれなければ、スイング開始の許可を通知しないので、誤ったスイング解析結果を提示するおそれを低減させることができる。
In addition, according to the present embodiment, the
また、本実施形態によれば、ユーザー2は、傾き判定装置20の表示部25に表示される画像300により、シャフトプレーン30及びホーガンプレーン40の位置や傾き、Vゾーンの大きさなどからアドレス姿勢を客観的に認識することができる。また、ユーザー2は、ダウンスイング時のゴルフクラブ3の軌道とシャフトプレーン30及びホーガンプレーン40との位置関係(ゴルフクラブ3の軌道がVゾーンに入っているか否か)を認識することができるので、スイングの良し悪しを評価することができる。
Further, according to the present embodiment, the
また、本実施形態によれば、傾き判定装置20は、ユーザー2の両肩を結ぶ線分上の所定位置63のZ座標AZを、シャフトプレーン30にあるグリップエンドの位置62のZ座標GZとユーザー2の腕の長さL2との和とすることで、ユーザー2の体型に合ったホーガンプレーン40を特定することができる。
Further, according to this embodiment, the
また、本実施形態によれば、傾き判定装置20は、統計データに基づいて導出される身長と腕の長さとの間の相関式を用いて、ユーザー2の身体情報244に含まれる身長の情報から腕の長さL2を計算するので、ユーザー2は、通常は正確な数値を知らない腕の長さの情報を入力する必要がなく、利便性もよい。
In addition, according to the present embodiment, the
また、本実施形態によれば、センサーユニット10を用いてシャフトプレーン30及びホーガンプレーン40を特定するので、カメラなどの大掛かりな装置を使用する必要がな
く、スイング解析を行う場所の制約が少ない。
Moreover, according to this embodiment, since the
また、本実施形態によれば、傾き判定装置20は、ダウンスイングにおけるゴルフクラブ3の軌跡がVゾーンに入るか否かを判定し、判定結果に基づくスイングの評価情報を提示するので、ユーザー2は、スイングの良し悪しを客観的かつ容易に評価することができる。
Further, according to the present embodiment, the
2.変形例
本発明は本実施形態に限定されず、本発明の要旨の範囲内で種々の変形実施が可能である。
2. The present invention is not limited to this embodiment, and various modifications can be made within the scope of the present invention.
例えば、上記の実施形態では、第1特定部213と第2特定部214は、傾き算出部211が算出したゴルフクラブ3の傾き(傾斜角θ)が基準範囲に含まれる場合に、それぞれ第1線分51(あるいはシャフトプレーン30)と第2線分53(あるいはホーガンプレーン40)を特定する処理を行う(傾斜角θが基準範囲に含まれない場合は当該処理を行わない)が、本発明はこれに限られない。例えば、ユーザー2が所定時間継続して静止していることが検出された場合には、傾斜角θが基準範囲に含まれるか否かによらず、第1特定部213と第2特定部214が上記の処理を行い、傾斜角θが基準範囲に含まれるに、画像データ生成部216が、シャフトプレーン30のポリゴンデータ、ホーガンプレーン40のポリゴンデータ及びゴルフクラブ3の軌跡を表す曲線データを含む画像データを生成する(傾斜角θが基準範囲に含まれない場合は当該画像データを生成しない)ようにしてもよい。
For example, in the above-described embodiment, the first specifying
また、上記の実施形態では、傾き算出部211は、センサーユニット10の計測データを用いて、スイング開始前のゴルフクラブ3の傾き(傾斜角θ)を直接的に算出し、判定部212は、傾斜角θが基準範囲に含まれるか否かを直接的に判定しているが、本発明はこれに限られない。例えば、ゴルフクラブ3の長軸方向とセンサーユニット10の各検出軸とのなす角度が既知である場合に、傾き算出部211は、センサーユニット10の計測データを用いて、センサーユニット10の傾き(例えば、1つの検出軸の水平面(XY平面)に対する傾斜角)あるいは姿勢を算出し、判定部212は、ゴルフクラブ3の傾斜角θの基準範囲に対応するセンサーユニット10の傾きあるいは姿勢の範囲を規定する情報に基づき、センサーユニット10の傾きあるいは姿勢が当該範囲に含まれるか否かを判定することにより、傾斜角θが基準範囲に含まれるか否かを間接的に判定してもよい。
In the above embodiment, the
また、上記の実施形態では、第2特定部214は、ユーザー2の頭部と胸部の間(例えば、両肩を結ぶ線分上)の所定位置63のZ座標AZを、式(9)のように、グリップエンドの位置62のY座標GYとユーザー2の腕の長さL2の和として計算しているが、これ以外の式を用いてもよい。例えば、第2特定部214は、AZ=GY+K・L2のように、L2に係数Kを乗じてGYに加算してAZを求めてもよい。
In the above embodiment, the second
また、上記の実施形態では、処理部21は、ゴルフクラブ3に装着したセンサーユニット10の計測データを用いて、シャフトプレーン及びホーガンプレーンを特定し、スイング中のゴルフクラブ3の軌跡を計算しているが、これ以外にも、例えば、ユーザー2の腕(手首など)に装着したセンサーユニット10の計測データを用いて、上記実施形態と同様の方法で、シャフトプレーン及びホーガンプレーンの特定やゴルフクラブ3の軌跡の計算を行ってもよい。あるいは、ゴルフクラブ3やユーザー2の腕あるいは肩などの部位に、複数のセンサーユニット10を装着し、当該複数のセンサーユニット10の各々の計測データを用いて、シャフトプレーン及びホーガンプレーンの特定やゴルフクラブ3の軌跡の計算を行ってもよい。
Moreover, in said embodiment, the
また、上記の実施形態では、第2特定部214は、ユーザー2の身体情報を用いてユーザー2の頭部と胸部の間(例えば、両肩を結ぶ線分上)の所定位置63の座標を算出し、第2軸である第2線分53やホーガンプレーン40を特定しているが、本発明はこれに限られない。例えば、第2特定部214は、第1特定部213が特定した第1軸である第1線分51とシャフトプレーン30を、それぞれX軸周りに所定の角度(例えば30°)だけ回転させたものを第2線分53とホーガンプレーン40として特定してもよい。
In the above embodiment, the second specifying
また、上記の実施形態では、処理部21は、センサーユニットが計測した3軸角速度の合成値として式(14)に示すような二乗和の平方根を用いて、ユーザー2が打球したタイミング(インパクト)を検出しているが、3軸角速度の合成値として、これ以外にも、例えば、3軸角速度の二乗和、3軸角速度の和あるいはその平均値、3軸角速度の積等を用いてもよい。また、3軸角速度の合成値に代えて、3軸加速度の二乗和あるいはその平方根、3軸加速度の和あるいはその平均値、3軸加速度の積等の3軸加速度の合成値を用いてもよい。
Further, in the above embodiment, the
また、上記の実施形態では、加速度センサー12と角速度センサー14が、センサーユニット10に内蔵されて一体化されているが、加速度センサー12と角速度センサー14は一体化されていなくてもよい。あるいは、加速度センサー12と角速度センサー14が、センサーユニット10に内蔵されずに、ゴルフクラブ3又はユーザー2に直接装着されてもよい。また、上記の実施形態では、センサーユニット10と傾き判定装置20が別体であるが、これらを一体化してゴルフクラブ3又はユーザー2に装着可能にしてもよい。また、センサーユニット10が、慣性センサー(例えば、加速度センサー12あるいは角速度センサー14)とともに、傾き算出部211、判定部212、あるいは、傾き判定装置20のその他の構成要素を備え、本発明の傾き判定装置として機能してもよい。
In the above embodiment, the
また、上記の実施形態では、ゴルフスイングを解析する傾き判定システム(傾き判定装置)を例に挙げたが、本発明は、テニスや野球などの様々な運動において、運度開始前の運動器具の傾きが基準範囲に含まれるか否かを判定する傾き判定システム(傾き判定装置)に適用することができる。 In the above-described embodiment, the tilt determination system (tilt determination device) that analyzes the golf swing is taken as an example. However, the present invention is applicable to various exercises such as tennis and baseball before the start of luck. The present invention can be applied to an inclination determination system (inclination determination apparatus) that determines whether an inclination is included in a reference range.
上述した実施形態および変形例は一例であって、これらに限定されるわけではない。例えば、各実施形態および各変形例を適宜組み合わせることも可能である。 The above-described embodiments and modifications are merely examples, and the present invention is not limited to these. For example, it is possible to appropriately combine each embodiment and each modification.
本発明は、実施の形態で説明した構成と実質的に同一の構成(例えば、機能、方法及び結果が同一の構成、あるいは目的及び効果が同一の構成)を含む。また、本発明は、実施の形態で説明した構成の本質的でない部分を置き換えた構成を含む。また、本発明は、実施の形態で説明した構成と同一の作用効果を奏する構成又は同一の目的を達成することができる構成を含む。また、本発明は、実施の形態で説明した構成に公知技術を付加した構成を含む。 The present invention includes configurations that are substantially the same as the configurations described in the embodiments (for example, configurations that have the same functions, methods, and results, or configurations that have the same objects and effects). In addition, the invention includes a configuration in which a non-essential part of the configuration described in the embodiment is replaced. In addition, the present invention includes a configuration that exhibits the same operational effects as the configuration described in the embodiment or a configuration that can achieve the same object. Further, the invention includes a configuration in which a known technique is added to the configuration described in the embodiment.
1 傾き判定システム、2 ユーザー、3 ゴルフクラブ、4 ゴルフボール、10 センサーユニット、12 加速度センサー、14 角速度センサー、16 信号処理部、18 通信部、20 傾き判定装置、21 処理部、22 通信部、23 操作部、24 記憶部、25 表示部、26 音出力部、30 シャフトプレーン、40 ホーガンプレーン、51 第1線分、52 第3線分、53 第2線分、61 ゴルフクラブのヘッドの位置、62 ゴルフクラブのグリップエンドの位置、63 ユーザーの両肩を結ぶ線分上の所定位置、210 データ取得部、211 傾き算出部、212 判定部、213 第1特定部、214 第2特定部、215 運動解析部、216 画像データ生成部、217 記憶処理部、218 表示処理部、219 音出力処理部、240 運動解析プロ
グラム、242 ゴルフクラブ情報、244身体情報、246 センサー装着位置情報、248 基準範囲情報、300 画像、301 シャフトプレーンを表すポリゴン、302 ホーガンプレーンを表すポリゴン、303 ダウンスイング時のゴルフクラブの軌跡を表す曲線
1 tilt determination system, 2 users, 3 golf clubs, 4 golf balls, 10 sensor unit, 12 acceleration sensor, 14 angular velocity sensor, 16 signal processing unit, 18 communication unit, 20 tilt determination device, 21 processing unit, 22 communication unit, 23 Operation unit, 24 Storage unit, 25 Display unit, 26 Sound output unit, 30 Shaft plane, 40 Hogan plane, 51 First line segment, 52 Third line segment, 53 Second line segment, 61 Position of
Claims (12)
前記運動器具の傾きが、前記運動器具に関する情報とユーザーの身体情報とに基づいて決定される基準範囲に含まれるか否かを判定する判定部と、を含む、傾き判定装置。 Using an output signal of the inertial sensor, an inclination calculating unit for calculating an inclination of the exercise apparatus before starting exercise,
And a determination unit that determines whether or not the inclination of the exercise equipment is included in a reference range that is determined based on information related to the exercise equipment and physical information of the user.
前記運動器具の傾きが前記基準範囲に含まれている時の前記慣性センサーの出力信号を用いて、前記第1軸を特定する、請求項6に記載の傾き判定装置。 The first specifying unit includes:
The inclination determination apparatus according to claim 6, wherein the first axis is specified using an output signal of the inertial sensor when the inclination of the exercise apparatus is included in the reference range.
前記運動器具の傾きが前記基準範囲に含まれている時の前記慣性センサーの出力信号を用いて、前記第2軸を特定する、請求項8に記載の傾き判定装置。 The second specifying unit includes:
The inclination determination apparatus according to claim 8, wherein the second axis is specified using an output signal of the inertial sensor when the inclination of the exercise apparatus is included in the reference range.
前記運動器具の傾きが、前記運動器具に関する情報とユーザーの身体情報とに基づいて決定される基準範囲に含まれるか否かを判定する判定工程と、を含む、傾き判定方法。 An inclination calculation step of calculating the inclination of the exercise equipment before starting exercise using the output signal of the inertial sensor,
And a determination step of determining whether or not the inclination of the exercise equipment is included in a reference range determined based on information on the exercise equipment and user's physical information.
前記運動器具の傾きが、前記運動器具に関する情報とユーザーの身体情報とに基づいて決定される基準範囲に含まれるか否かを判定する判定工程と、をコンピューターに実行させる、プログラム。 An inclination calculation step of calculating the inclination of the exercise equipment before starting exercise using the output signal of the inertial sensor,
A program for causing a computer to execute a determination step of determining whether or not the inclination of the exercise equipment is included in a reference range determined based on information related to the exercise equipment and physical information of the user.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014258824A JP2016116745A (en) | 2014-12-22 | 2014-12-22 | Tilt determination device, tilt determination system, tilt determination method and program |
| US14/965,375 US20160175650A1 (en) | 2014-12-19 | 2015-12-10 | Inclination determination device, inclination determination system, inclination determination method, exercise analysis device, exercise analysis system, exercise analysis method, and recording medium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014258824A JP2016116745A (en) | 2014-12-22 | 2014-12-22 | Tilt determination device, tilt determination system, tilt determination method and program |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2016116745A true JP2016116745A (en) | 2016-06-30 |
Family
ID=56242595
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014258824A Pending JP2016116745A (en) | 2014-12-19 | 2014-12-22 | Tilt determination device, tilt determination system, tilt determination method and program |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2016116745A (en) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019524392A (en) * | 2017-03-17 | 2019-09-05 | リッキー,ブレット | Method and apparatus for simulating gaming events |
| JP2020116475A (en) * | 2020-05-18 | 2020-08-06 | カシオ計算機株式会社 | Motion analysis device, and motion analysis method and program |
| JP2020137565A (en) * | 2019-02-26 | 2020-09-03 | H2L株式会社 | Pose determination system |
-
2014
- 2014-12-22 JP JP2014258824A patent/JP2016116745A/en active Pending
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019524392A (en) * | 2017-03-17 | 2019-09-05 | リッキー,ブレット | Method and apparatus for simulating gaming events |
| JP7133546B2 (en) | 2017-03-17 | 2022-09-08 | リッキー,ブレット | Method and Apparatus for Simulating Gaming Events |
| JP2020137565A (en) * | 2019-02-26 | 2020-09-03 | H2L株式会社 | Pose determination system |
| JP7212934B2 (en) | 2019-02-26 | 2023-01-26 | H2L株式会社 | Pose judgment system |
| JP2020116475A (en) * | 2020-05-18 | 2020-08-06 | カシオ計算機株式会社 | Motion analysis device, and motion analysis method and program |
| JP7134418B2 (en) | 2020-05-18 | 2022-09-12 | カシオ計算機株式会社 | Motion analysis device, motion analysis method and program |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9962591B2 (en) | Motion analysis method, program, and motion analysis device | |
| JP6696109B2 (en) | Motion analysis device, motion analysis system, motion analysis method and program | |
| TW201501752A (en) | Motion analysis method and motion analysis device | |
| JP6613684B2 (en) | Swing diagnostic method, swing diagnostic program, recording medium, swing diagnostic device, and swing diagnostic system | |
| JP2015156882A (en) | Motion analysis device and motion analysis system | |
| JP2016067410A (en) | Motion analysis device, motion analysis system, and motion analysis method and program | |
| JP2017023639A (en) | Swing diagnostic device, swing diagnostic system, swing diagnostic method, swing diagnostic program and storage medium | |
| JP2017023638A (en) | Swing diagnostic device, swing diagnostic system, swing diagnostic method, swing diagnostic program and storage medium | |
| JP2017086164A (en) | Electronic apparatus, system, method, program, and recording medium | |
| JP2017029516A (en) | Golf swing analysis device | |
| US20160175650A1 (en) | Inclination determination device, inclination determination system, inclination determination method, exercise analysis device, exercise analysis system, exercise analysis method, and recording medium | |
| KR20160106670A (en) | Movement analysis method, movement analysis device, movement analysis system and program | |
| US10286285B2 (en) | Display method, display apparatus, motion analysis system, motion analysis program, and recording medium | |
| US10252136B2 (en) | Swing diagnosis apparatus, swing diagnosis system, swing diagnosis method, and recording medium | |
| JP6380733B2 (en) | Motion analysis device, motion analysis system, motion analysis method, motion analysis information display method and program | |
| JP2016116566A (en) | Motion analysis device, motion analysis method, program, and motion analysis system | |
| JP2016116615A (en) | Motion analysis device, motion analysis system, motion analysis method, and program | |
| WO2015146062A1 (en) | Motion analysis method, motion analysis device, motion analysis system and program | |
| JP2017023644A (en) | Arithmetic device, arithmetic system, arithmetic method, arithmetic program, and storage medium | |
| JP2016116613A (en) | Motion analysis device, motion analysis system, motion analysis method, and program | |
| US20170203188A1 (en) | Display method, motion analysis apparatus, motion analysis system, motion analysis program, and recording medium | |
| JP2017086850A (en) | Electronic apparatus, system, method, program, and recording medium | |
| JP2016116745A (en) | Tilt determination device, tilt determination system, tilt determination method and program | |
| JP2016055028A (en) | Motion analysis method, motion analysis device, motion analysis system and program | |
| US20160175649A1 (en) | Exercise analysis device, exercise analysis method, program, recording medium, and exercise analysis system |