JP2016007080A - 映像のイントラ予測符号化方法、イントラ予測復号化方法及びその装置 - Google Patents
映像のイントラ予測符号化方法、イントラ予測復号化方法及びその装置 Download PDFInfo
- Publication number
- JP2016007080A JP2016007080A JP2015203118A JP2015203118A JP2016007080A JP 2016007080 A JP2016007080 A JP 2016007080A JP 2015203118 A JP2015203118 A JP 2015203118A JP 2015203118 A JP2015203118 A JP 2015203118A JP 2016007080 A JP2016007080 A JP 2016007080A
- Authority
- JP
- Japan
- Prior art keywords
- intra prediction
- pixel
- block
- mode
- current block
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims abstract description 42
- 239000000284 extract Substances 0.000 claims description 2
- 230000002093 peripheral effect Effects 0.000 abstract description 113
- 238000010586 diagram Methods 0.000 description 33
- 238000004364 calculation method Methods 0.000 description 10
- 230000006835 compression Effects 0.000 description 9
- 238000007906 compression Methods 0.000 description 9
- 238000013139 quantization Methods 0.000 description 9
- 238000013507 mapping Methods 0.000 description 7
- 238000001914 filtration Methods 0.000 description 6
- 238000006243 chemical reaction Methods 0.000 description 5
- 230000006870 function Effects 0.000 description 1
Images
















Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/593—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving spatial prediction techniques
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/103—Selection of coding mode or of prediction mode
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/103—Selection of coding mode or of prediction mode
- H04N19/105—Selection of the reference unit for prediction within a chosen coding or prediction mode, e.g. adaptive choice of position and number of pixels used for prediction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/103—Selection of coding mode or of prediction mode
- H04N19/11—Selection of coding mode or of prediction mode among a plurality of spatial predictive coding modes
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/136—Incoming video signal characteristics or properties
- H04N19/14—Coding unit complexity, e.g. amount of activity or edge presence estimation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/167—Position within a video image, e.g. region of interest [ROI]
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/17—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object
- H04N19/176—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object the region being a block, e.g. a macroblock
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/182—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being a pixel
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/189—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the adaptation method, adaptation tool or adaptation type used for the adaptive coding
- H04N19/196—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the adaptation method, adaptation tool or adaptation type used for the adaptive coding being specially adapted for the computation of encoding parameters, e.g. by averaging previously computed encoding parameters
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/44—Decoders specially adapted therefor, e.g. video decoders which are asymmetric with respect to the encoder
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/513—Processing of motion vectors
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/80—Details of filtering operations specially adapted for video compression, e.g. for pixel interpolation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/90—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using coding techniques not provided for in groups H04N19/10-H04N19/85, e.g. fractals
- H04N19/91—Entropy coding, e.g. variable length coding [VLC] or arithmetic coding
Abstract
Description

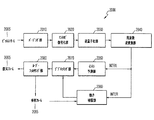
110 イントラ予測部
120 動き推定部
125 動き補償部
130 周波数変換部
140 量子化部
150 エントロピ符号化部
160 逆量子化部
170 周波数逆変換部
180 デブロッキング部
190 ループ・フィルタリング部
2000 映像復号化装置
2010 パージング部
2020 エントロピ復号化部
2030 逆量子化部
2040 周波数逆変換部
2050 イントラ予測部
2060 動き補償部
2070 デブロッキング部
2080 ループ・フィルタリング部
Claims (2)
- 映像の復号化方法において、
複数の方向のうち特定方向を指す現在ブロックのイントラ予測モードを抽出する段階と、
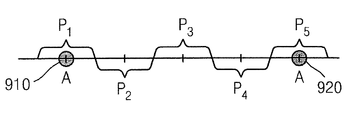
前記現在ブロックの左側または上側に位置した周辺ピクセルの個数を決定する段階と、
前記特定方向に基づき、前記現在ブロックの左側または上側に位置した周辺ピクセルの位置を決定する段階と、
前記決定された周辺ピクセルの個数、前記決定された周辺ピクセルの位置及び前記イントラ予測モードによって前記現在ブロックについてのイントラ予測を行う段階とを含み、
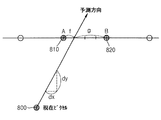
前記特定方向は水平方向にdx(dxは整数)及び垂直方向に固定された整数によって指されたり、垂直方向にdy(dyは整数)及び水平方向に固定された整数によって指され、
前記周辺ピクセルが位置を決定する段階は、
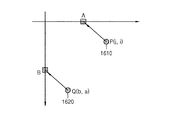
現在ピクセルの位置(j、i)(j、iは整数)、前記特定方向を指すdx及びdyのうち一つの値に基づいたシフト演算を用いて前記現在ブロックの左側または上側に位置した周辺ピクセルの位置を決定し、
>>はシフト演算であり、mは前記垂直方向に固定された整数と係わる値、nは水平方向に固定された整数と係わる値であるとする時、前記現在ブロックの上側に位置した周辺ピクセルの位置はi*dx>>mに基づき決定され、前記現在ブロックの左側に位置した周辺ピクセルの位置はj*dy>>nに基づき決定され、
前記dx、dyは前記現在ブロックのイントラ予測モードによって{32、26、21、17、13、9、5、2、0、−2、−5、−9、−13、−17、−21、−26}のうち一つの値を有することを特徴とする映像のイントラ予測復号化方法。 - 映像の復号化装置において、
複数の方向のうち特定方向を指す現在ブロックのイントラ予測モードを抽出するエントロピーデコーダと、
前記現在ブロックの左側または上側に位置した周辺ピクセルの個数を決定し、前記特定方向に基づき、前記現在ブロックの左側または上側に位置した周辺ピクセルの位置を決定し、前記決定された周辺ピクセルの個数、前記決定された周辺ピクセルの位置及び前記イントラ予測モードによって前記現在ブロックについてのイントラ予測を行うイントラ予測部とを備え、
前記特定方向は水平方向にdx(dxは整数)及び垂直方向に固定された整数によって指されたり、垂直方向にdy(dyは整数)及び水平方向に固定された整数によって指され、
前記イントラ予測部は、
現在ピクセルの位置(j、i)(j、iは整数)、前記特定方向を指すdx及びdyのうち一つの値に基づいたシフト演算を用いて前記現在ブロックの左側または上側に位置した周辺ピクセルの位置を決定し、
>>はシフト演算であり、mは前記垂直方向に固定された整数と係わる値、nは水平方向に固定された整数と係わる値であるとする時、前記現在ブロックの上側に位置した周辺ピクセルの位置はi*dx>>mに基づき決定され、前記現在ブロックの左側に位置した周辺ピクセルの位置はj*dy>>nに基づき決定され、
前記dx、dyは前記現在ブロックのイントラ予測モードによって{32、26、21、17、13、9、5、2、0、−2、−5、−9、−13、−17、−21、−26}のうち一つの値を有することを特徴とする映像の復号化装置。
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US36498610P | 2010-07-16 | 2010-07-16 | |
| US61/364,986 | 2010-07-16 | ||
| KR1020100097424A KR101530284B1 (ko) | 2010-07-16 | 2010-10-06 | 영상의 인트라 예측 부호화, 복호화 방법 및 장치 |
| KR10-2010-0097424 | 2010-10-06 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013519606A Division JP6067556B2 (ja) | 2010-07-16 | 2011-07-15 | 映像のイントラ予測符号化方法、イントラ予測復号化方法及びその装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016007080A true JP2016007080A (ja) | 2016-01-14 |
| JP6076435B2 JP6076435B2 (ja) | 2017-02-08 |
Family
ID=45613437
Family Applications (5)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013519606A Active JP6067556B2 (ja) | 2010-07-16 | 2011-07-15 | 映像のイントラ予測符号化方法、イントラ予測復号化方法及びその装置 |
| JP2015203119A Active JP6134761B2 (ja) | 2010-07-16 | 2015-10-14 | 映像のイントラ予測符号化方法、イントラ予測復号化方法及びその装置 |
| JP2015203120A Active JP6076436B2 (ja) | 2010-07-16 | 2015-10-14 | 映像のイントラ予測符号化方法、イントラ予測復号化方法及びその装置 |
| JP2015203121A Active JP6076437B2 (ja) | 2010-07-16 | 2015-10-14 | 映像のイントラ予測符号化方法、イントラ予測復号化方法及びその装置 |
| JP2015203118A Active JP6076435B2 (ja) | 2010-07-16 | 2015-10-14 | 映像のイントラ予測符号化方法、イントラ予測復号化方法及びその装置 |
Family Applications Before (4)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013519606A Active JP6067556B2 (ja) | 2010-07-16 | 2011-07-15 | 映像のイントラ予測符号化方法、イントラ予測復号化方法及びその装置 |
| JP2015203119A Active JP6134761B2 (ja) | 2010-07-16 | 2015-10-14 | 映像のイントラ予測符号化方法、イントラ予測復号化方法及びその装置 |
| JP2015203120A Active JP6076436B2 (ja) | 2010-07-16 | 2015-10-14 | 映像のイントラ予測符号化方法、イントラ予測復号化方法及びその装置 |
| JP2015203121A Active JP6076437B2 (ja) | 2010-07-16 | 2015-10-14 | 映像のイントラ予測符号化方法、イントラ予測復号化方法及びその装置 |
Country Status (30)
| Country | Link |
|---|---|
| US (6) | US9083987B2 (ja) |
| EP (4) | EP3280145B1 (ja) |
| JP (5) | JP6067556B2 (ja) |
| KR (7) | KR101530284B1 (ja) |
| CN (8) | CN109309832A (ja) |
| AU (3) | AU2011277214B2 (ja) |
| BR (5) | BR122020013768B1 (ja) |
| CA (6) | CA2805230C (ja) |
| CY (3) | CY1119640T1 (ja) |
| DK (4) | DK3280145T3 (ja) |
| ES (4) | ES2646173T3 (ja) |
| HR (3) | HRP20171673T1 (ja) |
| HU (4) | HUE043675T2 (ja) |
| IL (5) | IL224195A (ja) |
| LT (3) | LT3280145T (ja) |
| MX (1) | MX2013000653A (ja) |
| MY (5) | MY178168A (ja) |
| NO (1) | NO2594075T3 (ja) |
| NZ (5) | NZ705190A (ja) |
| PH (4) | PH12015500304A1 (ja) |
| PL (4) | PL3280145T3 (ja) |
| PT (3) | PT3282705T (ja) |
| RS (3) | RS58200B1 (ja) |
| RU (5) | RU2597484C2 (ja) |
| SG (5) | SG195596A1 (ja) |
| SI (3) | SI2594075T1 (ja) |
| TR (2) | TR201900358T4 (ja) |
| TW (4) | TWI619382B (ja) |
| WO (1) | WO2012008790A2 (ja) |
| ZA (1) | ZA201300581B (ja) |
Families Citing this family (35)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8867854B2 (en) * | 2008-10-01 | 2014-10-21 | Electronics And Telecommunications Research Institute | Image encoder and decoder using undirectional prediction |
| KR101452860B1 (ko) | 2009-08-17 | 2014-10-23 | 삼성전자주식회사 | 영상의 부호화 방법 및 장치, 영상 복호화 방법 및 장치 |
| US9532059B2 (en) | 2010-10-05 | 2016-12-27 | Google Technology Holdings LLC | Method and apparatus for spatial scalability for video coding |
| CA3029042C (en) | 2010-12-21 | 2021-06-15 | Ntt Docomo, Inc. | Enhanced intra-prediction coding using planar representations |
| US20130336398A1 (en) * | 2011-03-10 | 2013-12-19 | Electronics And Telecommunications Research Institute | Method and device for intra-prediction |
| CN103220506B (zh) * | 2012-01-19 | 2015-11-25 | 华为技术有限公司 | 一种编解码方法和设备 |
| US9094681B1 (en) | 2012-02-28 | 2015-07-28 | Google Inc. | Adaptive segmentation |
| US9185429B1 (en) | 2012-04-30 | 2015-11-10 | Google Inc. | Video encoding and decoding using un-equal error protection |
| US9781447B1 (en) | 2012-06-21 | 2017-10-03 | Google Inc. | Correlation based inter-plane prediction encoding and decoding |
| US9332276B1 (en) | 2012-08-09 | 2016-05-03 | Google Inc. | Variable-sized super block based direct prediction mode |
| US9167268B1 (en) | 2012-08-09 | 2015-10-20 | Google Inc. | Second-order orthogonal spatial intra prediction |
| US9380298B1 (en) | 2012-08-10 | 2016-06-28 | Google Inc. | Object-based intra-prediction |
| US9344742B2 (en) | 2012-08-10 | 2016-05-17 | Google Inc. | Transform-domain intra prediction |
| US9826229B2 (en) | 2012-09-29 | 2017-11-21 | Google Technology Holdings LLC | Scan pattern determination from base layer pixel information for scalable extension |
| US9681128B1 (en) | 2013-01-31 | 2017-06-13 | Google Inc. | Adaptive pre-transform scanning patterns for video and image compression |
| US9247251B1 (en) * | 2013-07-26 | 2016-01-26 | Google Inc. | Right-edge extension for quad-tree intra-prediction |
| JP6614472B2 (ja) | 2013-09-30 | 2019-12-04 | サン パテント トラスト | 画像符号化方法、画像復号方法、画像符号化装置及び画像復号装置 |
| US10057587B2 (en) * | 2015-01-31 | 2018-08-21 | Qualcomm Incorporated | Coding escape pixels for palette mode coding |
| JP6952056B2 (ja) * | 2016-01-22 | 2021-10-20 | オートレイシーズ, インク.Otraces, Inc. | 疾患診断を改善するシステム及び方法 |
| CN108702502A (zh) | 2016-02-16 | 2018-10-23 | 三星电子株式会社 | 用于减小帧内预测误差的帧内预测方法和用于其的装置 |
| EP4030754A1 (en) | 2016-05-02 | 2022-07-20 | Industry-University Cooperation Foundation Hanyang University | Image encoding/decoding method and computer-readable medium |
| GB2550579A (en) * | 2016-05-23 | 2017-11-29 | Sony Corp | Image data encoding and decoding |
| US10405054B2 (en) * | 2016-08-17 | 2019-09-03 | Nuovo Solutions Llc | System and method of remotely determining QoE |
| CN107786874A (zh) * | 2016-08-24 | 2018-03-09 | 浙江大学 | 双向的帧内方向性预测方法和装置 |
| CN117395408A (zh) * | 2016-10-04 | 2024-01-12 | 韩国电子通信研究院 | 对图像进行编码/解码的方法和设备以及记录介质 |
| CN117857784A (zh) | 2016-10-14 | 2024-04-09 | 世宗大学校产学协力团 | 影像编码/解码方法及比特流的传送方法 |
| WO2019009749A1 (en) * | 2017-07-05 | 2019-01-10 | Huawei Technologies Co., Ltd | APPARATUS AND METHOD FOR INTRA DIRECTIONAL PREDICTION USING AN ADJUSTMENT PLAN AND A PLURALITY OF PRIMARY REFERENCE SAMPLES AND A PLURALITY OF SECONDARY REFERENCE SAMPLES |
| CN116684617A (zh) | 2017-11-28 | 2023-09-01 | Lx 半导体科技有限公司 | 图像编码/解码方法、图像数据的传输方法和存储介质 |
| CN107995494B (zh) * | 2017-12-12 | 2019-11-22 | 珠海全志科技股份有限公司 | 视频图像数据的压缩方法与解压方法、计算机装置、计算机可读存储介质 |
| CN109922329B (zh) * | 2017-12-13 | 2021-02-26 | 北京传送科技有限公司 | 虚拟现实影像数据的压缩方法、解压缩方法及装置 |
| GB2577056B (en) * | 2018-09-11 | 2022-12-14 | British Broadcasting Corp | Bitstream decoder |
| CN110072112B (zh) * | 2019-03-12 | 2023-05-12 | 浙江大华技术股份有限公司 | 帧内预测方法、编码器及存储装置 |
| WO2021168817A1 (zh) * | 2020-02-28 | 2021-09-02 | 深圳市大疆创新科技有限公司 | 视频处理的方法及装置 |
| KR102297479B1 (ko) * | 2020-04-10 | 2021-09-03 | 삼성전자주식회사 | 움직임 벡터의 부호화 장치 및 방법, 및 움직임 벡터의 복호화 장치 및 방법 |
| CN112087634B (zh) * | 2020-08-11 | 2022-03-08 | 北京博雅慧视智能技术研究院有限公司 | 一种最佳角度判定方法和系统 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20060227863A1 (en) * | 2005-04-11 | 2006-10-12 | Andrew Adams | Method and system for spatial prediction in a video encoder |
| JP2009284275A (ja) * | 2008-05-23 | 2009-12-03 | Nippon Telegr & Teleph Corp <Ntt> | 画像符号化方法、画像復号方法、画像符号化装置、画像復号装置、画像符号化プログラム、画像復号プログラムおよびそれらのプログラムを記録したコンピュータ読み取り可能な記録媒体 |
| WO2010002214A2 (ko) * | 2008-07-02 | 2010-01-07 | 삼성전자 주식회사 | 영상의 부호화 방법 및 장치, 그 복호화 방법 및 장치 |
| JP2011205259A (ja) * | 2010-03-24 | 2011-10-13 | Nippon Hoso Kyokai <Nhk> | イントラ予測装置、符号化器、復号器及びプログラム |
Family Cites Families (35)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101448162B (zh) | 2001-12-17 | 2013-01-02 | 微软公司 | 处理视频图像的方法 |
| RU2314656C2 (ru) * | 2002-06-11 | 2008-01-10 | Нокиа Корпорейшн | Внутреннее кодирование, основанное на пространственном прогнозировании |
| KR100886191B1 (ko) * | 2004-12-06 | 2009-02-27 | 엘지전자 주식회사 | 영상 블록을 디코딩 하는 방법 |
| WO2006070614A1 (ja) | 2004-12-28 | 2006-07-06 | Nec Corporation | 画像符号化装置、画像符号化方法及びそのプログラム |
| JP2006246431A (ja) | 2005-02-07 | 2006-09-14 | Matsushita Electric Ind Co Ltd | 画像符号化装置および画像符号化方法 |
| JP2007116351A (ja) * | 2005-10-19 | 2007-05-10 | Ntt Docomo Inc | 画像予測符号化装置、画像予測復号装置、画像予測符号化方法、画像予測復号方法、画像予測符号化プログラム、及び画像予測復号プログラム |
| JP4114885B2 (ja) | 2005-10-31 | 2008-07-09 | 松下電器産業株式会社 | 画像符号化装置、方法、及びプログラム |
| KR100750145B1 (ko) * | 2005-12-12 | 2007-08-21 | 삼성전자주식회사 | 영상의 인트라 예측 부호화, 복호화 방법 및 장치 |
| KR101246294B1 (ko) * | 2006-03-03 | 2013-03-21 | 삼성전자주식회사 | 영상의 인트라 예측 부호화, 복호화 방법 및 장치 |
| KR100745765B1 (ko) | 2006-04-13 | 2007-08-02 | 삼성전자주식회사 | 화상 데이터의 공간상 예측 장치 및 방법과 그를 이용한부호화 장치 및 방법, 화상 데이터의 공간상 예측 보상장치 및 방법과 그를 이용한 복호화 장치 및 방법 |
| CA2659351A1 (en) | 2006-07-28 | 2008-01-31 | Kabushiki Kaisha Toshiba | Method and apparatus for encoding and decoding image |
| CN100413344C (zh) * | 2006-10-20 | 2008-08-20 | 清华大学 | 高并行度的帧内预测器的实现方法 |
| FR2908007A1 (fr) * | 2006-10-31 | 2008-05-02 | Thomson Licensing Sas | Procede de codage d'une sequence d'images |
| WO2008056923A1 (en) * | 2006-11-07 | 2008-05-15 | Samsung Electronics Co, . Ltd. | Method and apparatus for encoding and decoding based on intra prediction |
| WO2008084817A1 (ja) * | 2007-01-09 | 2008-07-17 | Kabushiki Kaisha Toshiba | 画像符号化と復号化の方法及び装置 |
| JP5026092B2 (ja) * | 2007-01-12 | 2012-09-12 | 三菱電機株式会社 | 動画像復号装置および動画像復号方法 |
| KR101370286B1 (ko) | 2007-04-06 | 2014-03-06 | 삼성전자주식회사 | 레지듀얼 블록의 변형을 이용한 영상 부호화, 복호화 방법및 장치 |
| KR101362757B1 (ko) | 2007-06-11 | 2014-02-14 | 삼성전자주식회사 | 인터 컬러 보상을 이용한 영상의 부호화 방법 및 장치,복호화 방법 및 장치 |
| KR101378338B1 (ko) * | 2007-06-14 | 2014-03-28 | 삼성전자주식회사 | 영상 복구를 이용한 인트라 예측 부호화, 복호화 방법 및장치 |
| TWI415478B (zh) * | 2007-10-15 | 2013-11-11 | Nippon Telegraph & Telephone | 影像編碼裝置及解碼裝置、影像編碼方法及解碼方法,其程式與記錄有程式的記錄媒體 |
| KR101375664B1 (ko) * | 2007-10-29 | 2014-03-20 | 삼성전자주식회사 | 영상의 디퓨전 특성을 이용한 영상 부호화/복호화 방법 및장치 |
| CN101163249B (zh) * | 2007-11-20 | 2010-07-21 | 北京工业大学 | 直流模式预测方法 |
| EP2081386A1 (en) * | 2008-01-18 | 2009-07-22 | Panasonic Corporation | High precision edge prediction for intracoding |
| TWI375472B (en) * | 2008-02-04 | 2012-10-21 | Ind Tech Res Inst | Intra prediction method for luma block of video |
| JP2011515060A (ja) * | 2008-03-09 | 2011-05-12 | エルジー エレクトロニクス インコーポレイティド | ビデオ信号のエンコーディングまたはデコーディング方法及び装置 |
| KR101559763B1 (ko) * | 2008-07-02 | 2015-10-13 | 삼성전자주식회사 | 비트 위치에 기초한 영상 분리를 이용한 영상 부호화, 복호화 방법 및 장치 |
| TWI359617B (en) | 2008-07-03 | 2012-03-01 | Univ Nat Taiwan | Low-complexity and high-quality error concealment |
| US8311112B2 (en) * | 2008-12-31 | 2012-11-13 | Entropic Communications, Inc. | System and method for video compression using predictive coding |
| CN101600116A (zh) * | 2009-03-11 | 2009-12-09 | 北京中星微电子有限公司 | 一种帧内预测方法及装置 |
| KR101452860B1 (ko) | 2009-08-17 | 2014-10-23 | 삼성전자주식회사 | 영상의 부호화 방법 및 장치, 영상 복호화 방법 및 장치 |
| KR101510108B1 (ko) | 2009-08-17 | 2015-04-10 | 삼성전자주식회사 | 영상의 부호화 방법 및 장치, 그 복호화 방법 및 장치 |
| EP2942960A1 (en) * | 2009-12-01 | 2015-11-11 | HUMAX Holdings Co., Ltd. | Apparatus for decoding high-resolution images |
| KR101503269B1 (ko) * | 2010-04-05 | 2015-03-17 | 삼성전자주식회사 | 영상 부호화 단위에 대한 인트라 예측 모드 결정 방법 및 장치, 및 영상 복호화 단위에 대한 인트라 예측 모드 결정 방법 및 장치 |
| US8644375B2 (en) * | 2010-04-09 | 2014-02-04 | Sharp Laboratories Of America, Inc. | Methods and systems for intra prediction |
| HUE054630T2 (hu) * | 2010-07-14 | 2021-09-28 | Ntt Docomo Inc | Kis komplexitású intra predikció videó kódoláshoz |
-
2010
- 2010-10-06 KR KR1020100097424A patent/KR101530284B1/ko active IP Right Grant
-
2011
- 2011-07-15 DK DK17192209.9T patent/DK3280145T3/en active
- 2011-07-15 SI SI201131337T patent/SI2594075T1/sl unknown
- 2011-07-15 CN CN201811376393.0A patent/CN109309832A/zh active Pending
- 2011-07-15 RU RU2015120335/08A patent/RU2597484C2/ru active
- 2011-07-15 BR BR122020013768-1A patent/BR122020013768B1/pt active IP Right Grant
- 2011-07-15 DK DK17192220.6T patent/DK3282705T3/en active
- 2011-07-15 RU RU2015120341A patent/RU2607233C2/ru active
- 2011-07-15 PL PL17192209T patent/PL3280145T3/pl unknown
- 2011-07-15 CA CA2805230A patent/CA2805230C/en active Active
- 2011-07-15 LT LTEP17192209.9T patent/LT3280145T/lt unknown
- 2011-07-15 TW TW106136849A patent/TWI619382B/zh active
- 2011-07-15 US US13/184,096 patent/US9083987B2/en active Active
- 2011-07-15 JP JP2013519606A patent/JP6067556B2/ja active Active
- 2011-07-15 CA CA2892121A patent/CA2892121C/en active Active
- 2011-07-15 SG SG2013078985A patent/SG195596A1/en unknown
- 2011-07-15 ES ES11807075.4T patent/ES2646173T3/es active Active
- 2011-07-15 NO NO11807075A patent/NO2594075T3/no unknown
- 2011-07-15 PL PL11807075T patent/PL2594075T3/pl unknown
- 2011-07-15 DK DK18207477.3T patent/DK3462737T3/da active
- 2011-07-15 TR TR2019/00358T patent/TR201900358T4/tr unknown
- 2011-07-15 PL PL18207477T patent/PL3462737T3/pl unknown
- 2011-07-15 MY MYPI2015000535A patent/MY178168A/en unknown
- 2011-07-15 CN CN201510292445.6A patent/CN104980748B/zh active Active
- 2011-07-15 MY MYPI2015000534A patent/MY177339A/en unknown
- 2011-07-15 BR BR122021006834-8A patent/BR122021006834B1/pt active IP Right Grant
- 2011-07-15 SI SI201131646T patent/SI3280145T1/sl unknown
- 2011-07-15 RU RU2015120322A patent/RU2621008C2/ru active
- 2011-07-15 MY MYPI2015000532A patent/MY177337A/en unknown
- 2011-07-15 SI SI201131647T patent/SI3282705T1/sl unknown
- 2011-07-15 BR BR122020013770-3A patent/BR122020013770B1/pt active IP Right Grant
- 2011-07-15 TR TR2019/00362T patent/TR201900362T4/tr unknown
- 2011-07-15 PL PL17192220T patent/PL3282705T3/pl unknown
- 2011-07-15 SG SG10201705244PA patent/SG10201705244PA/en unknown
- 2011-07-15 RS RS20190011A patent/RS58200B1/sr unknown
- 2011-07-15 PT PT17192220T patent/PT3282705T/pt unknown
- 2011-07-15 CN CN201711348673.6A patent/CN107959856B/zh active Active
- 2011-07-15 CN CN201510293915.0A patent/CN104967852B/zh active Active
- 2011-07-15 TW TW105115637A patent/TWI607651B/zh active
- 2011-07-15 EP EP17192209.9A patent/EP3280145B1/en active Active
- 2011-07-15 CN CN201510292303.XA patent/CN104994386B/zh active Active
- 2011-07-15 EP EP17192220.6A patent/EP3282705B1/en active Active
- 2011-07-15 MX MX2013000653A patent/MX2013000653A/es active IP Right Grant
- 2011-07-15 HU HUE17192209A patent/HUE043675T2/hu unknown
- 2011-07-15 CN CN201180044566.9A patent/CN103119945B/zh active Active
- 2011-07-15 SG SG2013002621A patent/SG187055A1/en unknown
- 2011-07-15 CA CA2891843A patent/CA2891843C/en active Active
- 2011-07-15 RS RS20171116A patent/RS56474B1/sr unknown
- 2011-07-15 DK DK11807075.4T patent/DK2594075T3/da active
- 2011-07-15 TW TW100125148A patent/TWI540885B/zh active
- 2011-07-15 CA CA3001241A patent/CA3001241C/en active Active
- 2011-07-15 HU HUE11807075A patent/HUE037744T2/hu unknown
- 2011-07-15 PT PT17192209T patent/PT3280145T/pt unknown
- 2011-07-15 BR BR112013001093-2A patent/BR112013001093B1/pt active IP Right Grant
- 2011-07-15 CA CA2891774A patent/CA2891774C/en active Active
- 2011-07-15 EP EP11807075.4A patent/EP2594075B1/en active Active
- 2011-07-15 ES ES17192220T patent/ES2708834T3/es active Active
- 2011-07-15 ES ES17192209T patent/ES2708833T3/es active Active
- 2011-07-15 NZ NZ705190A patent/NZ705190A/en unknown
- 2011-07-15 NZ NZ606080A patent/NZ606080A/en unknown
- 2011-07-15 TW TW107103164A patent/TWI664856B/zh active
- 2011-07-15 NZ NZ705185A patent/NZ705185A/en unknown
- 2011-07-15 MY MYPI2013000136A patent/MY160172A/en unknown
- 2011-07-15 RU RU2013106810/08A patent/RU2555236C2/ru active
- 2011-07-15 MY MYPI2015000533A patent/MY178314A/en unknown
- 2011-07-15 HU HUE17192220A patent/HUE043982T2/hu unknown
- 2011-07-15 AU AU2011277214A patent/AU2011277214B2/en active Active
- 2011-07-15 SG SG10201804324YA patent/SG10201804324YA/en unknown
- 2011-07-15 EP EP18207477.3A patent/EP3462737B1/en active Active
- 2011-07-15 WO PCT/KR2011/005214 patent/WO2012008790A2/en active Application Filing
- 2011-07-15 CN CN201510292286.XA patent/CN105049857B/zh active Active
- 2011-07-15 CA CA2891777A patent/CA2891777C/en active Active
- 2011-07-15 SG SG10201800097YA patent/SG10201800097YA/en unknown
- 2011-07-15 RS RS20190010A patent/RS58199B1/sr unknown
- 2011-07-15 NZ NZ705192A patent/NZ705192A/en unknown
- 2011-07-15 ES ES18207477T patent/ES2781786T3/es active Active
- 2011-07-15 RU RU2015120337/08A patent/RU2579989C2/ru active
- 2011-07-15 LT LTEP11807075.4T patent/LT2594075T/lt unknown
- 2011-07-15 PT PT118070754T patent/PT2594075T/pt unknown
- 2011-07-15 LT LTEP17192220.6T patent/LT3282705T/lt unknown
- 2011-07-15 HU HUE18207477A patent/HUE051090T2/hu unknown
- 2011-07-15 NZ NZ705187A patent/NZ705187A/en unknown
- 2011-07-15 BR BR122021006833-0A patent/BR122021006833B1/pt active IP Right Grant
- 2011-07-15 CN CN201510292494.XA patent/CN105049858B/zh active Active
-
2013
- 2013-01-13 IL IL224195A patent/IL224195A/en active IP Right Grant
- 2013-01-22 ZA ZA2013/00581A patent/ZA201300581B/en unknown
-
2014
- 2014-10-29 KR KR1020140148751A patent/KR101712104B1/ko active IP Right Grant
-
2015
- 2015-02-06 US US14/616,383 patent/US9654795B2/en active Active
- 2015-02-11 PH PH12015500304A patent/PH12015500304A1/en unknown
- 2015-02-11 PH PH12015500305A patent/PH12015500305A1/en unknown
- 2015-02-11 PH PH12015500302A patent/PH12015500302A1/en unknown
- 2015-02-11 PH PH12015500303A patent/PH12015500303B1/en unknown
- 2015-02-20 US US14/627,669 patent/US9661344B2/en active Active
- 2015-02-20 US US14/627,765 patent/US9654796B2/en active Active
- 2015-02-20 US US14/627,810 patent/US9654797B2/en active Active
- 2015-05-18 AU AU2015202671A patent/AU2015202671B2/en active Active
- 2015-05-18 AU AU2015202669A patent/AU2015202669B2/en active Active
- 2015-07-23 KR KR1020150104342A patent/KR101769428B1/ko active IP Right Grant
- 2015-07-23 KR KR1020150104340A patent/KR101712106B1/ko active IP Right Grant
- 2015-07-23 KR KR1020150104339A patent/KR101712105B1/ko active IP Right Grant
- 2015-07-23 KR KR1020150104341A patent/KR101712107B1/ko active IP Right Grant
- 2015-10-14 JP JP2015203119A patent/JP6134761B2/ja active Active
- 2015-10-14 JP JP2015203120A patent/JP6076436B2/ja active Active
- 2015-10-14 JP JP2015203121A patent/JP6076437B2/ja active Active
- 2015-10-14 JP JP2015203118A patent/JP6076435B2/ja active Active
-
2016
- 2016-03-13 IL IL244570A patent/IL244570B/en active IP Right Grant
- 2016-03-13 IL IL244567A patent/IL244567A/en active IP Right Grant
- 2016-03-13 IL IL244569A patent/IL244569B/en active IP Right Grant
- 2016-03-13 IL IL244568A patent/IL244568B/en active IP Right Grant
-
2017
- 2017-05-04 US US15/586,935 patent/US10212452B2/en active Active
- 2017-08-11 KR KR1020170102573A patent/KR101874102B1/ko active IP Right Grant
- 2017-11-02 HR HRP20171673TT patent/HRP20171673T1/hr unknown
- 2017-11-30 CY CY20171101256T patent/CY1119640T1/el unknown
-
2019
- 2019-01-03 HR HRP20190021TT patent/HRP20190021T1/hr unknown
- 2019-01-03 HR HRP20190022TT patent/HRP20190022T1/hr unknown
- 2019-01-30 CY CY20191100133T patent/CY1121263T1/el unknown
- 2019-01-30 CY CY20191100132T patent/CY1121256T1/el unknown
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20060227863A1 (en) * | 2005-04-11 | 2006-10-12 | Andrew Adams | Method and system for spatial prediction in a video encoder |
| JP2009284275A (ja) * | 2008-05-23 | 2009-12-03 | Nippon Telegr & Teleph Corp <Ntt> | 画像符号化方法、画像復号方法、画像符号化装置、画像復号装置、画像符号化プログラム、画像復号プログラムおよびそれらのプログラムを記録したコンピュータ読み取り可能な記録媒体 |
| WO2010002214A2 (ko) * | 2008-07-02 | 2010-01-07 | 삼성전자 주식회사 | 영상의 부호화 방법 및 장치, 그 복호화 방법 및 장치 |
| JP2011205259A (ja) * | 2010-03-24 | 2011-10-13 | Nippon Hoso Kyokai <Nhk> | イントラ予測装置、符号化器、復号器及びプログラム |
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6076435B2 (ja) | 映像のイントラ予測符号化方法、イントラ予測復号化方法及びその装置 | |
| JP6673976B2 (ja) | 映像符号化単位に係わるイントラ予測モード決定方法及びその装置、並びに映像復号化単位に係わるイントラ予測モード決定方法及びその装置 | |
| JP5314136B2 (ja) | 映像の符号化方法及び装置、並びにその復号化方法及び装置 | |
| JP2016195444A (ja) | 映像復号化方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20151014 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20161213 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170110 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6076435 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |