JP2014012518A - Hybrid vehicle - Google Patents
Hybrid vehicle Download PDFInfo
- Publication number
- JP2014012518A JP2014012518A JP2013162530A JP2013162530A JP2014012518A JP 2014012518 A JP2014012518 A JP 2014012518A JP 2013162530 A JP2013162530 A JP 2013162530A JP 2013162530 A JP2013162530 A JP 2013162530A JP 2014012518 A JP2014012518 A JP 2014012518A
- Authority
- JP
- Japan
- Prior art keywords
- power
- engine
- output
- internal combustion
- predetermined
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images














Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02P—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN THE PRODUCTION OR PROCESSING OF GOODS
- Y02P90/00—Enabling technologies with a potential contribution to greenhouse gas [GHG] emissions mitigation
- Y02P90/60—Electric or hybrid propulsion means for production processes
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
Landscapes
- Electric Propulsion And Braking For Vehicles (AREA)
- Hybrid Electric Vehicles (AREA)
Abstract
Description
本発明は、ハイブリッド車に関し、詳しくは、走行用の動力を出力可能で排気浄化用の浄化触媒を有する浄化装置が排気系に取り付けられた内燃機関と、走行用の動力を入出力可能な電動機と、電動機と電力をやりとり可能な二次電池と、を備えるハイブリッド車に関する。 The present invention relates to a hybrid vehicle, and more specifically, an internal combustion engine capable of outputting power for traveling and having a purification device having a purification catalyst for exhaust purification attached to an exhaust system, and an electric motor capable of inputting / outputting power for traveling And a secondary battery capable of exchanging electric power with an electric motor.
従来、この種のハイブリッド車としては、浄化装置が取り付けられて駆動輪に連結された駆動軸に動力を出力するエンジンと、駆動軸に接続されたモータと、モータと電力をやりとりするバッテリと、を備え、浄化装置の触媒の流入口部位ですら暖機が完了していないときには、暖機促進用の回転数と値0のトルクとからなる運転ポイントでエンジンを運転しながら走行するようエンジンとモータとを制御し、浄化装置の触媒の流入口部位の暖機が完了しているが他の部位についての暖機は完了していないときには、エンジンを軽負荷運転するための負荷制限と駆動軸に出力すべき要求トルクに基づく車両の要求パワーとのうち小さい方のパワーに基づいて設定した運転ポイントでエンジンを運転しながら走行するようエンジンとモータとを制御するものが提案されている(例えば、特許文献1参照)。このハイブリッド車では、こうした制御により、浄化装置の触媒を完全に暖機する前であってもエミッションを良好に保持した状態でエンジンから動力を出力することができる。 Conventionally, as this type of hybrid vehicle, an engine that outputs power to a drive shaft connected to a drive wheel with a purification device attached, a motor connected to the drive shaft, a battery that exchanges power with the motor, And even if the catalyst inlet of the purifier is not warmed up, the engine is operated so as to run while operating the engine at an operating point consisting of a rotational speed for warming up and a torque of 0. When the warm-up of the catalyst inlet of the purifier is completed but the warm-up of other parts is not completed, the load limit and drive shaft for operating the engine at a light load are controlled. The engine and the motor are driven so that the vehicle runs while operating the engine at the operation point set based on the smaller one of the required power of the vehicle based on the required torque to be output to Gosuru have been proposed (e.g., see Patent Document 1). In this hybrid vehicle, power can be output from the engine in such a state that the emission is well maintained even before the catalyst of the purification device is completely warmed up by such control.
上述のハイブリッド車では、浄化装置の触媒の流入口部位の暖機が完了しているが他の部位についての暖機は完了していないときにおいて、アクセルペダルの踏み込み量が小さいときなど要求パワーが負荷制限より小さいときには、要求パワーの変化に応じてエンジンの運転ポイントが変更されることになる。触媒暖機時にエンジンの運転ポイントが頻繁に変更されると、エンジンでの燃焼が安定しにくくなるなどの不都合を生じる場合がある。 In the hybrid vehicle described above, when the warm-up of the catalyst inlet port of the purifier is completed but the warm-up of other parts is not completed, the required power is low when the amount of depression of the accelerator pedal is small. When it is smaller than the load limit, the operating point of the engine is changed according to the change in the required power. If the operating point of the engine is frequently changed when the catalyst is warmed up, there may be inconveniences such as difficulty in stabilizing combustion in the engine.
本発明のハイブリッド車は、浄化装置の浄化触媒の暖機要求がなされているときにおいて、内燃機関での燃焼が安定しにくくなるなどの不都合を抑制することを主目的とする。 The main purpose of the hybrid vehicle of the present invention is to suppress inconveniences such as difficulty in stabilizing combustion in an internal combustion engine when a warm-up request for the purification catalyst of the purification apparatus is made.
本発明のハイブリッド車は、上述の主目的を達成するために以下の手段を採った。 The hybrid vehicle of the present invention employs the following means in order to achieve the main object described above.
本発明のハイブリッド車は、
走行用の動力を出力可能で排気浄化用の浄化触媒を有する浄化装置が排気系に取り付けられた内燃機関と、走行用の動力を出力可能な電動機と、前記電動機と電力のやりとりが可能な二次電池と、を備えるハイブリッド車であって、
走行に要求される走行用パワーを設定する走行用パワー設定手段と、
前記浄化触媒の暖機要求がなされているときにおいて、前記浄化触媒の一部が活性化していると判断するための所定条件が成立するまでは、前記浄化触媒の暖機用の第1所定運転ポイントで前記内燃機関が継続して運転されながら前記設定された走行用パワーに基づくパワーによって走行するよう前記内燃機関と前記電動機とを制御し、前記所定条件が成立した以降は、前記第1所定運転ポイントに比して前記内燃機関からの出力が大きくなる範囲内で定められた前記浄化触媒の暖機用の第2所定運転ポイントで前記内燃機関が継続して運転されながら前記設定された走行用パワーに基づくパワーによって走行するよう前記内燃機関と前記電動機とを制御する暖機時制御手段と、
を備えることを要旨とする。
The hybrid vehicle of the present invention
An internal combustion engine in which a purification device capable of outputting power for traveling and having a purification catalyst for purifying exhaust gas is attached to an exhaust system, an electric motor capable of outputting power for traveling, and two electric power exchangeable with the electric motor A hybrid vehicle comprising:
Traveling power setting means for setting traveling power required for traveling;
A first predetermined operation for warming up the purification catalyst is performed until a predetermined condition for determining that a part of the purification catalyst is activated when a request for warming up the purification catalyst is made. The internal combustion engine and the electric motor are controlled so as to travel with power based on the set traveling power while the internal combustion engine is continuously operated at the point, and after the predetermined condition is satisfied, the first predetermined The set travel while the internal combustion engine is continuously operated at the second predetermined operation point for warming up the purification catalyst, which is determined within a range in which the output from the internal combustion engine is larger than the operation point. A warm-up control means for controlling the internal combustion engine and the electric motor so as to travel with power based on power for power;
It is a summary to provide.
この本発明のハイブリッド車では、浄化触媒の暖機要求がなされているときにおいて、浄化触媒の一部が活性化していると判断するための所定条件が成立するまでは、浄化触媒の暖機用の第1所定運転ポイントで内燃機関が継続して運転されながら走行に要求される走行用パワーに基づくパワーによって走行するよう内燃機関と電動機とを制御する。そして、所定条件が成立した以降は、第1所定運転ポイントに比して内燃機関からの出力が大きくなる範囲内で定められた浄化触媒の暖機用の第2所定運転ポイントで内燃機関が継続して運転されながら走行用パワーに基づくパワーによって走行するよう内燃機関と電動機とを制御する。これにより、所定条件が成立するまでと所定条件が成立した後とのそれぞれにおいて、走行用パワーの変化に応じて内燃機関の運転ポイントが変更されることによる不都合(例えば、燃焼が安定しにくくなるなど)を抑制しながら浄化触媒を暖機することができる。また、所定条件が成立した後において、所定条件が成立するまでに比して内燃機関から大きなパワーを出力しながら走行することができる。もとより、触媒暖機時のエミッションの悪化を抑制することができる。ここで、「所定条件」は、浄化触媒の温度が浄化触媒の一部が活性化していると想定される温度以上になる条件である、ものとすることもできる。また、「第1所定運転ポイント」には、内燃機関の自立運転用の運転ポイントが含まれる。 In the hybrid vehicle of the present invention, when a request for warming up of the purification catalyst is made, until the predetermined condition for determining that a part of the purification catalyst is activated is satisfied, The internal combustion engine and the electric motor are controlled to travel with power based on the travel power required for travel while the internal combustion engine is continuously operated at the first predetermined operation point. After the predetermined condition is satisfied, the internal combustion engine continues at the second predetermined operation point for warming up the purification catalyst, which is determined within a range in which the output from the internal combustion engine is larger than the first predetermined operation point. Then, the internal combustion engine and the electric motor are controlled so as to travel with the power based on the traveling power while being operated. As a result, inconvenience (for example, combustion becomes difficult to be stabilized) due to the change of the operating point of the internal combustion engine in accordance with the change in the traveling power before and after the predetermined condition is satisfied. Etc.), the purification catalyst can be warmed up. Further, after the predetermined condition is satisfied, the vehicle can travel while outputting a larger power than the predetermined condition. Of course, it is possible to suppress the deterioration of the emission when the catalyst is warmed up. Here, the “predetermined condition” may be a condition in which the temperature of the purification catalyst is equal to or higher than a temperature at which a part of the purification catalyst is assumed to be activated. The “first predetermined operation point” includes an operation point for independent operation of the internal combustion engine.
こうした本発明のハイブリッド車において、前記内燃機関からの動力を用いて発電すると共に前記二次電池と電力のやりとりが可能な発電機と、前記二次電池の状態に基づいて該二次電池に充電可能な最大許容電力である入力制限を設定する入力制限設定手段と、を備え、前記第2所定運転ポイントは、前記所定条件が成立したときの前記設定された入力制限が大きく制限されているほど小さくなる傾向に定められるパワーと、予め定められた所定制約と、に基づいて定められる運転ポイントである、ものとすることもできる。また、本発明のハイブリッド車において、前記第2所定運転ポイントは、前記所定条件が成立したときの車速が低いほど小さくなる傾向に定められるパワーと、予め定められた所定制約と、に基づいて定められる運転ポイントである、ものとすることもできる。これらにおいて、「所定制約」は、内燃機関の回転数とトルクとの制約として内燃機関を効率よく運転する制約である、ものとすることもできる。 In such a hybrid vehicle of the present invention, a generator capable of generating electric power using the power from the internal combustion engine and exchanging electric power with the secondary battery, and charging the secondary battery based on the state of the secondary battery. Input limit setting means for setting an input limit that is the maximum allowable power, and the second predetermined operation point is such that the set input limit when the predetermined condition is satisfied is greatly limited. It is also possible that the driving point is determined based on the power determined to decrease and the predetermined constraint determined in advance. In the hybrid vehicle of the present invention, the second predetermined driving point is determined based on power determined to decrease as the vehicle speed decreases when the predetermined condition is satisfied, and a predetermined constraint. It can also be a driving point. In these, the “predetermined constraint” may be a constraint for efficiently operating the internal combustion engine as a constraint between the rotational speed and torque of the internal combustion engine.
また、本発明のハイブリッド車において、前記二次電池の状態に基づいて該二次電池から放電可能な最大許容電力である出力制限を設定する出力制限設定手段を備え、前記暖機時制御手段は、前記浄化触媒の暖機要求がなされているときにおいて、前記所定条件が成立するまでで前記設定された走行用パワーが前記設定された出力制限に相当するパワーと前記第1所定運転ポイントで前記内燃機関を運転したときに該内燃機関から出力されるパワーとの和より大きいとき、および、前記所定条件が成立した以降で前記設定された走行用パワーが前記設定された出力制限に相当するパワーと前記第2所定運転ポイントで前記内燃機関を運転したときに該内燃機関から出力されるパワーとの和より大きいときには、前記設定された走行用パワーから前記設定された出力制限に相当するパワーを減じて得られるパワーが前記内燃機関から出力されながら前記設定された走行用パワーによって走行するよう前記内燃機関と前記電動機とを制御する手段である、ものとすることもできる。こうすれば、走行用パワーが比較的大きいときにおいて、走行用パワーを内燃機関から出力するものに比してエミッションの悪化を抑制しながら走行用パワーを出力して走行することができる。 The hybrid vehicle of the present invention further includes output limit setting means for setting an output limit that is a maximum allowable power that can be discharged from the secondary battery based on a state of the secondary battery, and the warm-up control means includes: When the purification catalyst warm-up request is made, the set traveling power until the predetermined condition is satisfied is the power corresponding to the set output limit and the first predetermined operating point. When the internal combustion engine is operated, the power that is greater than the sum of the power output from the internal combustion engine and after the predetermined condition is satisfied, the set traveling power corresponds to the set output limit And the power output from the internal combustion engine when the internal combustion engine is operated at the second predetermined operating point. Means for controlling the internal combustion engine and the electric motor so that the power obtained by reducing the power corresponding to the set output limit is output from the internal combustion engine and travels with the set travel power. It can also be. In this way, when the traveling power is relatively large, the traveling power can be output while the deterioration of the emission is suppressed as compared with the case where the traveling power is output from the internal combustion engine.
さらに、本発明のハイブリッド車において、前記暖機時制御手段は、前記所定条件が成立した以降、前記内燃機関については、運転ポイントが前記第1所定運転ポイントから前記第2所定運転ポイントに徐々に変化しながら運転されると共に運転ポイントが前記第2所定運転ポイントまで変化した以降は該第2所定運転ポイントで運転されるよう制御する手段である、ものとすることもできる。こうすれば、内燃機関の運転ポイントの急変を抑制することができる。 Furthermore, in the hybrid vehicle of the present invention, the warm-up control means gradually increases the operating point from the first predetermined operating point to the second predetermined operating point for the internal combustion engine after the predetermined condition is satisfied. It may be a means for controlling the vehicle so that the vehicle is operated at the second predetermined operation point after the operation point is changed and the operation point is changed to the second predetermined operation point. In this way, sudden changes in the operating point of the internal combustion engine can be suppressed.
次に、本発明を実施するための形態を実施例を用いて説明する。 Next, the form for implementing this invention is demonstrated using an Example.
図1は、本発明の一実施例としてのハイブリッド自動車20の構成の概略を示す構成図である。実施例のハイブリッド自動車20は、図示するように、エンジン22と、エンジン22の出力軸としてのクランクシャフト26にダンパ28を介して接続された3軸式の動力分配統合機構30と、動力分配統合機構30に接続された発電可能なモータMG1と、動力分配統合機構30に接続された駆動軸としてのリングギヤ軸32aに取り付けられた減速ギヤ35と、この減速ギヤ35に接続されたモータMG2と、車両全体をコントロールするハイブリッド用電子制御ユニット70とを備える。
FIG. 1 is a configuration diagram showing an outline of the configuration of a
エンジン22は、例えばガソリンまたは軽油などの炭化水素系の燃料により動力を出力可能な内燃機関として構成されており、図2に示すように、エアクリーナ122により清浄された空気をスロットルバルブ124を介して吸入すると共に燃料噴射弁126からガソリンを噴射して吸入された空気とガソリンとを混合し、この混合気を吸気バルブ128を介して燃焼室に吸入し、点火プラグ130による電気火花によって爆発燃焼させて、そのエネルギにより押し下げられるピストン132の往復運動をクランクシャフト26の回転運動に変換する。エンジン22からの排気は、一酸化炭素(CO)や炭化水素(HC),窒素酸化物(NOx)の有害成分を浄化する浄化触媒(三元触媒)134aを有する浄化装置134を介して外気へ排出される。
The
エンジン22は、エンジン用電子制御ユニット(以下、エンジンECUという)24により制御されている。エンジンECU24は、CPU24aを中心とするマイクロプロセッサとして構成されており、CPU24aの他に処理プログラムを記憶するROM24bと、データを一時的に記憶するRAM24cと、図示しない入出力ポートおよび通信ポートとを備える。エンジンECU24には、エンジン22の状態を検出する種々のセンサからの信号、例えば、クランクシャフト26の回転位置を検出するクランクポジションセンサ140からのクランクポジションやエンジン22の冷却水の温度を検出する水温センサ142からの冷却水温Tw,燃焼室内に取り付けられた図示しない圧力センサからの筒内圧力,燃焼室へ吸排気を行なう吸気バルブ128や排気バルブを開閉するカムシャフトの回転位置を検出するカムポジションセンサ144からのカムポジション,スロットルバルブ124のポジションを検出するスロットルバルブポジションセンサ146からのスロットルポジション,吸気管に取り付けられたエアフローメータ148からの吸入空気量Qa,同じく吸気管に取り付けられた温度センサ149からの吸気温Tin,浄化触媒134aの所定部位(例えば、略中央部など)の温度を検出する温度センサ134bからの触媒温度Tc,空燃比センサ135aからの空燃比,酸素センサ135bからの酸素信号などが入力ポートを介して入力されている。また、エンジンECU24からは、エンジン22を駆動するための種々の制御信号、例えば、燃料噴射弁126への駆動信号や、スロットルバルブ124のポジションを調節するスロットルモータ136への駆動信号、イグナイタと一体化されたイグニッションコイル138への制御信号、吸気バルブ128の開閉タイミングを変更可能な可変バルブタイミング機構150への制御信号などが出力ポートを介して出力されている。エンジンECU24は、ハイブリッド用電子制御ユニット70と通信しており、ハイブリッド用電子制御ユニット70からの制御信号によりエンジン22を運転制御すると共に必要に応じてエンジン22の運転状態に関するデータを出力する。なお、エンジンECU24は、クランクポジションセンサ140からのクランクポジションに基づいてクランクシャフト26の回転数、即ちエンジン22の回転数Neも演算している。
The
動力分配統合機構30は、外歯歯車のサンギヤ31と、このサンギヤ31と同心円上に配置された内歯歯車のリングギヤ32と、サンギヤ31に噛合すると共にリングギヤ32に噛合する複数のピニオンギヤ33と、複数のピニオンギヤ33を自転かつ公転自在に保持するキャリア34とを備え、サンギヤ31とリングギヤ32とキャリア34とを回転要素として差動作用を行なう遊星歯車機構として構成されている。動力分配統合機構30は、キャリア34にはエンジン22のクランクシャフト26が、サンギヤ31にはモータMG1が、リングギヤ32にはリングギヤ軸32aを介して減速ギヤ35がそれぞれ連結されており、モータMG1が発電機として機能するときにはキャリア34から入力されるエンジン22からの動力をサンギヤ31側とリングギヤ32側にそのギヤ比に応じて分配し、モータMG1が電動機として機能するときにはキャリア34から入力されるエンジン22からの動力とサンギヤ31から入力されるモータMG1からの動力を統合してリングギヤ32側に出力する。リングギヤ32に出力された動力は、リングギヤ軸32aからギヤ機構60およびデファレンシャルギヤ62を介して、最終的には車両の駆動輪63a,63bに出力される。
The power distribution and
モータMG1およびモータMG2は、いずれも発電機として駆動することができると共に電動機として駆動できる周知の同期発電電動機として構成されており、インバータ41,42を介してバッテリ50と電力のやりとりを行なう。インバータ41,42とバッテリ50とを接続する電力ライン54は、各インバータ41,42が共用する正極母線および負極母線として構成されており、モータMG1,MG2のいずれかで発電される電力を他のモータで消費することができるようになっている。したがって、バッテリ50は、モータMG1,MG2のいずれかから生じた電力や不足する電力により充放電されることになる。なお、モータMG1,MG2により電力収支のバランスをとるものとすれば、バッテリ50は充放電されない。モータMG1,MG2は、いずれもモータ用電子制御ユニット(以下、モータECUという)40により駆動制御されている。モータECU40には、モータMG1,MG2を駆動制御するために必要な信号、例えばモータMG1,MG2の回転子の回転位置を検出する回転位置検出センサ43,44からの信号や図示しない電流センサにより検出されるモータMG1,MG2に印加される相電流などが入力されており、モータECU40からは、インバータ41,42へのスイッチング制御信号が出力されている。モータECU40は、ハイブリッド用電子制御ユニット70と通信しており、ハイブリッド用電子制御ユニット70からの制御信号によってモータMG1,MG2を駆動制御すると共に必要に応じてモータMG1,MG2の運転状態に関するデータをハイブリッド用電子制御ユニット70に出力する。なお、モータECU40は、回転位置検出センサ43,44からの信号に基づいてモータMG1,MG2の回転数Nm1,Nm2も演算している。
The motor MG1 and the motor MG2 are both configured as well-known synchronous generator motors that can be driven as generators and can be driven as motors, and exchange power with the
バッテリ50は、例えばリチウムイオン二次電池として構成されており、バッテリ用電子制御ユニット(以下、バッテリECUという)52によって管理されている。バッテリECU52には、バッテリ50を管理するのに必要な信号、例えば、バッテリ50の端子間に設置された図示しない電圧センサからの端子間電圧,バッテリ50の出力端子に接続された電力ライン54に取り付けられた図示しない電流センサからの充放電電流,バッテリ50に取り付けられた温度センサ51からの電池温度Tbなどが入力されており、必要に応じてバッテリ50の状態に関するデータを通信によりハイブリッド用電子制御ユニット70に出力する。また、バッテリECU52は、バッテリ50を管理するために電流センサにより検出された充放電電流の積算値に基づい残容量(SOC)を演算したり、演算した残容量(SOC)と電池温度Tbとに基づいてバッテリ50を充放電してもよい最大許容電力である入出力制限Win,Woutを演算している。なお、バッテリ50の入出力制限Win,Woutは、電池温度Tbに基づいて入出力制限Win,Woutの基本値を設定し、バッテリ50の残容量(SOC)に基づいて出力制限用補正係数と入力制限用補正係数とを設定し、設定した入出力制限Win,Woutの基本値に補正係数を乗じることにより設定することができる。図3に電池温度Tbと入出力制限Win,Woutとの関係の一例を示し、図4にバッテリ50の残容量(SOC)と入出力制限Win,Woutの補正係数との関係の一例を示す。こうして設定される入力制限Winは、電池温度Tbが所定温度Tbref(例えば、0℃やマイナス10℃など)以下の領域で電池温度Tbが低いほど大きく制限される(絶対値が小さい値となる)と共に残容量(SOC)が所定値Shi(例えば、60%など)以上の領域で残容量(SOC)が大きいほど大きく制限され、出力制限Woutは、電池温度Tbが所定温度Tbref以下の領域で電池温度Tbが低いほど大きく制限されると共に残容量(SOC)が所定値Slo(例えば、40%など)以下の領域で残容量(SOC)が小さいほど大きく制限される。
The
ハイブリッド用電子制御ユニット70は、CPU72を中心とするマイクロプロセッサとして構成されており、CPU72の他に処理プログラムを記憶するROM74と、データを一時的に記憶するRAM76と、図示しない入出力ポートおよび通信ポートとを備える。ハイブリッド用電子制御ユニット70には、イグニッションスイッチ80からのイグニッション信号,シフトレバー81の操作位置を検出するシフトポジションセンサ82からのシフトポジションSP,アクセルペダル83の踏み込み量を検出するアクセルペダルポジションセンサ84からのアクセル開度Acc,ブレーキペダル85の踏み込み量を検出するブレーキペダルポジションセンサ86からのブレーキペダルポジションBP,車速センサ88からの車速Vなどが入力ポートを介して入力されている。ハイブリッド用電子制御ユニット70は、前述したように、エンジンECU24やモータECU40,バッテリECU52と通信ポートを介して接続されており、エンジンECU24やモータECU40,バッテリECU52と各種制御信号やデータのやりとりを行なっている。
The hybrid
こうして構成された実施例のハイブリッド自動車20は、運転者によるアクセルペダル83の踏み込み量に対応するアクセル開度Accと車速Vとに基づいて駆動軸としてのリングギヤ軸32aに出力すべき要求トルクを計算し、この要求トルクに対応する要求動力がリングギヤ軸32aに出力されるように、エンジン22とモータMG1とモータMG2とが運転制御される。エンジン22とモータMG1とモータMG2の運転制御としては、要求動力に見合う動力がエンジン22から出力されるようにエンジン22を運転制御すると共にエンジン22から出力される動力のすべてが動力分配統合機構30とモータMG1とモータMG2とによってトルク変換されてリングギヤ軸32aに出力されるようモータMG1およびモータMG2を駆動制御するトルク変換運転モードや要求動力とバッテリ50の充放電に必要な電力との和に見合う動力がエンジン22から出力されるようにエンジン22を運転制御すると共にバッテリ50の充放電を伴ってエンジン22から出力される動力の全部またはその一部が動力分配統合機構30とモータMG1とモータMG2とによるトルク変換を伴って要求動力がリングギヤ軸32aに出力されるようモータMG1およびモータMG2を駆動制御する充放電運転モード、エンジン22の運転を停止してモータMG2からの要求動力に見合う動力をリングギヤ軸32aに出力するよう運転制御するモータ運転モードなどがある。
The
次に、こうして構成された実施例のハイブリッド自動車20の動作、特に、浄化装置134の浄化触媒13aを暖機する際の動作について説明する。図5は、ハイブリッド用電子制御ユニット70により実行される駆動制御ルーチンの一例を示すフローチャートである。このルーチンは、所定時間毎(例えば数msec毎)に繰り返し実行される。
Next, the operation of the
駆動制御ルーチンが実行されると、ハイブリッド用電子制御ユニット70のCPU72は、まず、アクセルペダルポジションセンサ84からのアクセル開度Accや車速センサ88からの車速V,モータMG1,MG2の回転数Nm1,Nm2,バッテリ50の入出力制限Win,Wout,触媒温度Tc,浄化触媒134aの暖機要求がなされているか否かを示す触媒暖機要求フラグFcなど制御に必要なデータを入力する処理を実行する(ステップS100)。ここで、モータMG1,MG2の回転数Nm1,Nm2は、回転位置検出センサ43,44により検出されたモータMG1,MG2の回転子の回転位置に基づいて演算されたものをモータECU40から通信により入力するものとした。また、バッテリ50の入出力制限Win,Woutは、バッテリ50の電池温度Tbとバッテリ50の残容量(SOC)とに基づいて設定されたものをバッテリECU52から通信により入力するものとした。さらに、触媒温度Tcは、温度センサ134bにより検出されたものをエンジンECU24から通信により入力するものとした。触媒暖機要求フラグFcは、温度センサ134bからの触媒温度Tcが浄化触媒134aの全体が活性化していると想定される活性化温度Tcact(例えば、400℃や420℃,450℃など)未満のときに値1が設定され、温度センサ134bからの触媒温度Tcが活性化温度Tcact以上のときに値0が設定されたものをエンジンECU24から通信により入力するものとした。
When the drive control routine is executed, first, the
こうしてデータを入力すると、入力したアクセル開度Accと車速Vとに基づいて車両に要求されるトルクとして駆動輪63a,63bに連結された駆動軸としてのリングギヤ軸32aに出力すべき要求トルクTr*と走行用パワーPdrv*とを設定する(ステップS110)。要求トルクTr*は、実施例では、アクセル開度Accと車速Vと要求トルクTr*との関係を予め定めて要求トルク設定用マップとしてROM74に記憶しておき、アクセル開度Accと車速Vとが与えられると記憶したマップから対応する要求トルクTr*を導出して設定するものとした。図6に要求トルク設定用マップの一例を示す。走行用パワーPdrv*は、設定した要求トルクTr*にリングギヤ軸32aの回転数Nrを乗じたものに損失としてのロスLossを加えて計算することができる。なお、リングギヤ軸32aの回転数Nrは、車速Vに換算係数を乗じることによって求めたり、モータMG2の回転数Nm2を減速ギヤ35のギヤ比Grで割ることによって求めたりすることができる。
When the data is thus input, the required torque Tr * to be output to the
続いて、触媒暖機要求フラグFcの値を調べ(ステップS120)、触媒暖機要求フラグFcが値1のときには、浄化触媒134aの暖機要求がなされていると判断し、触媒温度Tcを閾値Tcrefと比較する(ステップS130)。ここで、閾値Tcrefは、浄化触媒134aの一部が活性化しているか否かを判断するために用いられる閾値であり、例えば、180℃や200℃,220℃などを用いることができる。一般に、浄化触媒134aは、上流側の方が下流側に比して温度が上昇しやすく活性化しやすい。したがって、実施例では、浄化触媒134aの一部(例えば、上流側の端面周辺の部位など)が活性化している(活性化温度Tcact以上になっている)と想定されるときに温度センサ134bにより検出される触媒温度Tcを閾値Tcrefとして定めるものとした。
Subsequently, the value of the catalyst warm-up request flag Fc is checked (step S120), and when the catalyst warm-up request flag Fc is 1, it is determined that the warm-up request for the
触媒温度Tcが閾値Tcref未満のときには、走行用パワーPdrv*を、バッテリ50の出力制限Woutに換算係数kを乗じてパワーに換算したバッテリ出力可能パワー(k・Wout)と比較し(ステップS140)、走行用パワーPdrv*がバッテリ出力可能パワー(k・Wout)以下のときには、浄化触媒134aの暖機用の運転ポイント(以下、第1所定運転ポイントという)としての回転数Ne1とトルクTe1とをエンジン22の目標回転数Ne*と目標トルクTe*とに設定する(ステップS150)。ここで、第1所定運転ポイントは、触媒温度Tcが閾値Tcref未満のときの浄化触媒134aの浄化能力の範囲内で定めることができ、例えば、回転数Ne1としては、エンジン22を運転する際の下限値(例えば、1000rpmや1200rpm、1300rpm)やそれよりも若干大きな値などを用いることができ、トルクTe1としては、値0やそれよりも若干大きな値などを用いることができる。バッテリ出力可能パワー(k・Wout)は、エンジン22からパワーを出力しない場合の走行用の出力可能パワーの上限に相当するから、ステップS140の処理は、第1所定運転ポイントでエンジン22を運転したときのエンジン22からの出力パワーを略値0とみなしたときに、第1所定運転ポイントでエンジン22を運転しながら走行用パワーPdrv*によって走行することができるか否かを判定する処理であると考えることができる。なお、ステップS140の処理において、走行用パワーPdrv*をバッテリ出力可能パワー(k・Wout)と比較するのに代えて、走行用パワーPdrv*をバッテリ出力可能パワー(k・Wout)とパワー(Ne1・Te1)との和のパワー(k・Wout+Ne1・Te1)と比較するものとしてもよい。
When the catalyst temperature Tc is lower than the threshold value Tcref, the traveling power Pdrv * is compared with the battery output possible power (k · Wout) converted into power by multiplying the output limit Wout of the
続いて、設定したエンジン22の目標回転数Ne*とモータMG2の回転数Nm2と動力分配統合機構30のギヤ比ρと減速ギヤ35のギヤ比Grとを用いて次式(1)によりモータMG1の目標回転数Nm1*を計算すると共に計算した目標回転数Nm1*と入力したモータMG1の回転数Nm1とエンジン22の目標トルクTe*と動力分配統合機構30のギヤ比ρとに基づいて式(2)によりモータMG1のトルク指令Tm1*を計算する(ステップS250)。式(1)は、動力分配統合機構30の回転要素に対する力学的な関係式である。エンジン22を浄化触媒134aの暖機用の運転状態で運転しながら走行しているときの動力分配統合機構30の回転要素における回転数とトルクとの力学的な関係を示す共線図の一例を図7に示す。図中、左のS軸はモータMG1の回転数Nm1であるサンギヤ31の回転数を示し、C軸はエンジン22の回転数Neであるキャリア34の回転数を示し、R軸はモータMG2の回転数Nm2を減速ギヤ35のギヤ比Grで除したリングギヤ32の回転数Nrを示す。なお、R軸上の2つの太線矢印は、モータMG1から出力されたトルクTm1がリングギヤ軸32aに作用するトルクと、モータMG2から出力されるトルクTm2が減速ギヤ35を介してリングギヤ軸32aに作用するトルクとを示す。式(1)は、この共線図を用いれば容易に導くことができる。また、式(2)は、モータMG1を目標回転数Nm1*で回転させるためのフィードバック制御における関係式であり、式(2)中、右辺第2項の「k1」は比例項のゲインであり、右辺第3項の「k2」は積分項のゲインである。第1所定運転ポイントにおけるトルクTe1は小さな値(例えば値0など)であるから、エンジン22が回転数Ne1で運転されているときにはモータMG1のトルク指令Tm1*には絶対値が小さな値が設定されることになる。図7の共線図では、図示の必要上、一部の矢印については誇張している。
Subsequently, using the set target rotational speed Ne * of the
Nm1*=Ne*・(1+ρ)/ρ-Nm2/(Gr・ρ) (1)
Tm1tmp=-ρ・Te*/(1+ρ)+k1・(Nm1*-Nm1)+k2・∫(Nm1*-Nm1)dt (2)
Nm1 * = Ne * ・ (1 + ρ) / ρ-Nm2 / (Gr ・ ρ) (1)
Tm1tmp = -ρ ・ Te * / (1 + ρ) + k1 ・ (Nm1 * -Nm1) + k2 ・ ∫ (Nm1 * -Nm1) dt (2)
そして、要求トルクTr*に設定したトルク指令Tm1*を動力分配統合機構30のギヤ比ρで除したものを加えて更に減速ギヤ35のギヤ比Grで除してモータMG2から出力すべきトルクの仮の値である仮トルクTm2tmpを次式(3)により計算すると共に(ステップS260)、バッテリ50の入出力制限Win,Woutと設定したトルク指令Tm1*に現在のモータMG1の回転数Nm1を乗じて得られるモータMG1の消費電力(発電電力)との差分をモータMG2の回転数Nm2で割ることによりモータMG2から出力してもよいトルクの上下限としてのトルク制限Tm2min,Tm2maxを次式(4)および式(5)により計算し(ステップS270)、設定した仮トルクTm2tmpを式(6)によりトルク制限Tm2min,Tm2maxで制限してモータMG2のトルク指令Tm2*を設定する(ステップS280)。ここで、式(3)は、図7の共線図から容易に導くことができる。このようにモータMG2のトルク指令Tm2*を設定することにより、駆動軸としてのリングギヤ軸32aに出力する要求トルクTr*を、バッテリ50の入出力制限Win,Woutの範囲内で制限したトルクとして設定することができる。ここで、第1所定運転ポイントにおけるトルクTe1が小さく、モータMG1のトルク指令Tm1*の大きさも小さいことを考えると、トルク指令Tm1*を値0とすれば、仮モータトルクTm2tmpには要求トルクTr*を減速ギヤ35のギヤ比Grで除した値が設定される。そして、走行用パワーPdrv*がバッテリ出力可能パワー(k・Wout)以下であることを考慮すると、モータMG2のトルク指令Tm2*には、仮モータトルクTm2tmp、即ち要求トルクTr*を減速ギヤ35のギヤ比Grで除した値が設定されることになる。
Then, the torque command Tm1 * set as the required torque Tr * is divided by the gear ratio ρ of the power distribution and
Tm2tmp=(Tr*+Tm1*/ρ)/Gr (3)
Tm2min=(Win-Tm1*・Nm1)/Nm2 (4)
Tm2max=(Wout-Tm1*・Nm1)/Nm2 (5)
Tm2*=max(min(Tm2tmp,Tm2max),Tm2min) (6)
Tm2tmp = (Tr * + Tm1 * / ρ) / Gr (3)
Tm2min = (Win-Tm1 * ・ Nm1) / Nm2 (4)
Tm2max = (Wout-Tm1 * ・ Nm1) / Nm2 (5)
Tm2 * = max (min (Tm2tmp, Tm2max), Tm2min) (6)
こうしてエンジン22の目標回転数Ne*や目標トルクTe*,モータMG1,MG2のトルク指令Tm1*,Tm2*を設定すると、エンジン22の目標回転数Ne*と目標トルクTe*についてはエンジンECU24に、モータMG1,MG2のトルク指令Tm1*,Tm2*についてはモータECU40にそれぞれ送信し(ステップS290)、駆動制御ルーチンを終了する。目標回転数Ne*と目標トルクTe*とを受信したエンジンECU24は、エンジン22が目標回転数Ne*と目標トルクTe*とによって示される運転ポイントで運転されるようにエンジン22における吸入空気量制御や燃料噴射制御,点火制御などの制御を行なう。このとき、浄化触媒134aを暖機をより促進させるために、エンジン22の点火時期については、エンジン22を効率よく運転するための点火時期(以下、燃費用点火時期という)に比して遅く且つ触媒暖機に適した点火時期(以下、触媒暖機用点火時期という)を用いるものとした。また、トルク指令Tm1*,Tm2*を受信したモータECU40は、トルク指令Tm1*でモータMG1が駆動されると共にトルク指令Tm2*でモータMG2が駆動されるようインバータ41,42のスイッチング素子のスイッチング制御を行なう。このように第1所定運転ポイント(回転数Ne1およびトルクTe1)でエンジン22を継続して運転することにより、走行用パワーPdrv*の変化に応じてエンジン22の運転ポイントが変化することによる不都合(例えば、エンジン22の燃焼が安定しにくくなるなど)を抑制しながら浄化触媒134aを暖機することができる。もとより、触媒暖機時のミッションの悪化を抑制することができる。
Thus, when the target engine speed Ne *, the target torque Te *, and the torque commands Tm1 *, Tm2 * of the motors MG1, MG2 are set, the target engine speed Ne * and the target torque Te * of the
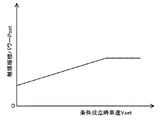
ステップS130で触媒温度Tcが閾値Tcref以上のときには、浄化触媒134aの一部(例えば、上流側の端面周辺の部位など)が活性化していると判断し、初期値として値0が設定されていると共に後述の触媒暖機パワーPsetを設定したときに値1が設定される触媒暖機パワー設定フラグFsetの値を調べ(ステップS160)、触媒暖機パワー設定フラグFsetが値0のときには、バッテリ50の入力制限Winに基づいて浄化触媒134aの暖機用の触媒暖機パワーPsetを設定すると共に(ステップS170)、触媒暖機パワー設定フラグFsetに値1を設定する(ステップS175)。ここで、触媒暖機パワーPsetは、浄化触媒134aの暖機要求がなされていて触媒温度Tcが閾値Tcref以上のときのエンジン22の運転ポイントの設定に用いるパワーであり、このときの浄化触媒134aの浄化能力の範囲内かつ第1所定運転ポイント(回転数Ne1およびトルクTe1)に比してエンジン22からの出力が大きくなる範囲内で定められる。この触媒暖機パワーPsetは、実施例では、触媒温度Tcが閾値Tcref以上に至ったときのバッテリ50の入力制限Win(以下、条件成立時入力制限Winsetという)と触媒暖機パワーPsetとの関係を予め定めて触媒暖機パワー設定用マップとしてROM74に記憶しておき、バッテリ50の入力制限Winが与えられると記憶したマップから対応する触媒暖機パワーPsetを導出して設定するものとした。触媒暖機パワー設定用マップの一例を図8に示す。触媒暖機パワーPsetは、図示するように、条件成立時入力制限Winsetの絶対値が小さい(大きく制限されている)ほど小さくなる傾向に設定される。これは、バッテリ50への過大な電力を入力を抑制し、バッテリ50の劣化を抑制するためである。
When the catalyst temperature Tc is equal to or higher than the threshold value Tcref in step S130, it is determined that a part of the
ステップS170,S175の処理を実行すると、または、ステップS160で触媒暖機パワー設定フラグFsetが値1であると判定されると、走行用パワーPdrv*をバッテリ出力可能パワー(k・Wout)と触媒暖機パワーPsetとの和のパワー(k・Wout+Pset)と比較する(ステップS180)。この処理は、触媒暖機パワーPsetがエンジン22から出力されるようエンジン22を運転しながら走行用パワーPdrv*によって走行することができるか否かを判定する処理である。
When the processing of steps S170 and S175 is executed, or when it is determined in step S160 that the catalyst warm-up power setting flag Fset is a
走行用パワーPdrv*がバッテリ出力可能パワー(k・Wout)と触媒暖機パワーPsetとの和以下のときには、触媒暖機パワーPsetをエンジン22から出力すべき要求パワーPe*として設定すると共に(ステップS190)、エンジン22の回転数NeとトルクTeとの制約としてエンジン22を効率よく運転する動作ライン(以下、燃費用動作ラインという)と要求パワーPe*とを用いて得られる回転数とトルクとをエンジン22の目標回転数Ne*と目標トルクTe*として設定し(ステップS200)、設定した目標回転数Ne*と目標トルクTe*とを用いてモータMG1,MG2のトルク指令Tm1*,Tm2*を上述したステップS250〜S280の処理によって設定し、エンジン22の目標回転数Ne*と目標トルクTe*についてはエンジンECU24に、モータMG1,MG2のトルク指令Tm1*,Tm2*についてはモータECU40にそれぞれ送信して(ステップS290)、本ルーチンを終了する。燃費用動作ラインの一例と目標回転数Ne*および目標トルクTe*を設定する様子とを図9に示す。なお、図9には、参考のために、第1所定運転ポイント(回転数Ne1およびトルクTe1)についても図示した。目標回転数Ne*および目標トルクTe*は、図示するように、燃費用動作ラインと要求パワーPe*が一定の曲線との交点により求めることができ、この場合、回転数Ne2およびトルクTe2として求めることができる。この回転数Ne2およびトルクTe2からなる運転ポイントは、触媒暖機パワーPsetに基づいて設定されることから、走行用パワーPdrv*が変化しても変化しない即ち一定である。以下、この運転ポイントを第2所定運転ポイントという。また、実施例では、エンジン22の点火時期については、触媒温度Tcが閾値Tcref以上になった以降に触媒暖機用点火時期から燃費用点火時期に向けて徐々に早くしていき、燃費用点火時期になってからはその時期を保持するものとした。このように第2所定運転ポイント(回転数Ne2およびトルクTe2)でエンジン22を継続して運転することにより、走行用パワーPdrv*の変化に応じてエンジン22の運転ポイントが変化することによる不都合(例えば、エンジン22の燃焼が安定しにくくなるなど)を抑制しながら浄化触媒134aを暖機することができる。また、このときには、触媒温度Tcが閾値Tcref未満のときに比してエンジン22から大きなパワーを出力しながら走行することができる。一般に、エンジン22は低出力領域(出力ゼロ即ち自立運転を含む)ではエンジン22からの出力が大きいほど運転効率が高くなるから、第1所定運転ポイントでエンジン22を運転するものに比してエンジン22の運転効率の向上を図ることができるとも言える。さらに、エンジン22の点火時期を触媒暖機用点火時期から早くすることにより、エンジン22のエネルギ効率をより向上させることができる。もとより、触媒暖機時のミッションの悪化を抑制することができる。
When the traveling power Pdrv * is less than or equal to the sum of the battery output power (k · Wout) and the catalyst warm-up power Pset, the catalyst warm-up power Pset is set as the required power Pe * to be output from the engine 22 (step) S190), the rotational speed and torque obtained by using the operation line (hereinafter referred to as fuel efficiency operation line) for efficiently operating the
ステップS140で走行用パワーPdrv*がバッテリ出力可能パワー(k・Wout)より大きいときや、S180で走行用パワーPdrv*がバッテリ出力可能パワー(k・Wout)と触媒暖機パワーPsetとの和より大きいときには、走行用パワーPdrv*からバッテリ出力可能パワー(k・Wout)を減じて得られるパワー(以下、差分パワーという)をエンジン22から出力すべき要求パワーPe*として設定すると共に(ステップS210)、前述した燃費用動作ラインと要求パワーPe*とを用いて得られる回転数とトルクとをエンジン22の目標回転数Ne*と目標トルクTe*として設定し(ステップS220)、設定した目標回転数Ne*と目標トルクTe*とを用いてモータMG1,MG2のトルク指令Tm1*,Tm2*を上述したステップS250〜S280の処理によって設定し、エンジン22の目標回転数Ne*と目標トルクTe*についてはエンジンECU24に、モータMG1,MG2のトルク指令Tm1*,Tm2*についてはモータECU40にそれぞれ送信して(ステップS290)、本ルーチンを終了する。燃費用動作ラインの一例とこの場合において目標回転数Ne*および目標トルクTe*を設定する様子とを図10に示す。図中、二つの破線の曲線は、要求パワーPe*を走行用パワーPdrv*としたとき(比較例)の要求パワーPe*が一定の曲線と、要求パワーPe*を差分パワー(Pdrv*−k・Wout)としたときの(実施例)の要求パワーPe*が一定の曲線とを示す。この場合の目標回転数Ne*および目標トルクTe*は、図示するように、回転数Ne3およびトルクTe3として求めることができる。エンジン22から走行用パワーPdrv*を出力するとき(比較例)とエンジン22から差分パワー(Pdrv*−k・Wout)を出力するときの動力分配統合機構30の回転要素における回転数とトルクとの力学的な関係を示す共線図を図11に示す。図中、破線がエンジン22から走行用パワーPdrv*を出力するときの共線図であり、実線がエンジン22から差分パワー(Pdrv*−k・Wout)を出力するときの共線図である。図10および図11に示すように、エンジン22から差分パワー(Pdrv*−k・Wout)を出力するときには、エンジン22から走行用パワーPdrv*を出力するときに比して、エンジン22の回転数NeもトルクTeも小さくなる。この結果、エンジン22から差分パワー(Pdrv*−k・Wout)を出力するときには、エンジン22から走行用パワーPdrv*を出力するときに比して、エミッションの悪化を抑制することができる。なお、差分パワー(Pdrv*−k・Wout)をエンジン22から出力すべき要求パワーPe*として設定してバッテリ50の入出力制限Win,Woutの範囲内で走行用パワーPdrv*により走行するよう制御すると、バッテリ50からはバッテリ出力可能パワー(k・Wout)を出力することができるから、ステップS270で設定されるトルク制限Tm2min,Tm2maxによる制限、即ちバッテリ50の入出力制限Win,Woutによる制限は行なわれず、仮モータトルクTm2tmpがモータMG2のトルク指令Tm2*に設定され、結果として、走行用パワーPdrv*により走行することができる。即ち、実施例では、走行用パワーPdrv*がバッテリ出力可能パワー(k・Wout)より大きいときには、走行用パワーPdrv*からバッテリ出力可能パワー(k・Wout)を減じて得られるパワーをエンジン22から出力すべき要求パワーPe*として設定して制御することにより、走行用パワーPdrv*を要求パワーPe*として設定して制御するものに比して、エミッションの悪化を抑制しながら走行用パワーPdrv*を出力して走行することができるのである。
When the travel power Pdrv * is larger than the battery output possible power (k · Wout) in step S140, or the travel power Pdrv * is obtained from the sum of the battery output possible power (k · Wout) and the catalyst warm-up power Pset in S180. When the power is large, the power obtained by subtracting the battery output power (k · Wout) from the travel power Pdrv * (hereinafter referred to as differential power) is set as the required power Pe * to be output from the engine 22 (step S210). The engine speed and torque obtained using the fuel efficiency operation line and the required power Pe * are set as the target engine speed Ne * and target torque Te * of the engine 22 (step S220), and the set target engine speed is set. Torque command Tm of motors MG1 and MG2 using Ne * and target torque Te * *, Tm2 * are set by the processing in steps S250 to S280 described above, the target engine speed Ne * and the target torque Te * of the
ステップS120で触媒暖機要求フラグFcが値0であるときには、浄化触媒134aの暖機要求はなされていないと判断し、バッテリ50の残容量(SOC)に基づいて設定されるバッテリ50を充放電するのに必要なパワーとしての充放電要求パワーPb*(バッテリ50から放電するときが正の値)を走行用パワーPdrv*から減じたパワーを要求パワーPe*として設定すると共に(ステップS230)、設定した要求パワーPe*と燃費用動作ラインとを用いて得られる回転数とトルクとをエンジン22の目標回転数Ne*と目標トルクTe*として設定し(ステップS240)、設定した目標回転数Ne*と目標トルクTe*とを用いてモータMG1,MG2のトルク指令Tm1*,Tm2*を上述したステップS250〜S280の処理によって設定し、エンジン22の目標回転数Ne*と目標トルクTe*についてはエンジンECU24に、モータMG1,MG2のトルク指令Tm1*,Tm2*についてはモータECU40にそれぞれ送信して(ステップS290)、駆動制御ルーチンを終了する。いま、充放電要求パワーPb*が値0であるとすれば、要求パワーPe*には走行用パワーPdrv*が設定されるから、目標回転数Ne*および目標トルクTe*には図10に例示する回転数Ne4およびトルクTe4が設定され、図11の破線の共線図のように動作することになる。なお、この場合、エンジン22の点火時期については、前述の燃費用点火時期が用いられる。
When the catalyst warm-up request flag Fc is 0 in step S120, it is determined that the warm-up request for the
以上説明した実施例のハイブリッド自動車20によれば、浄化触媒134aの暖機要求がなされているときにおいて、触媒温度Tcが閾値Tcref未満のときには、浄化触媒134aの暖機用の第1所定運転ポイント(回転数Ne1およびトルクTe1)でエンジン22を継続して運転しながら走行用パワーPdrv*に基づくパワーによって走行するようエンジン22とモータMG1,MG2とを制御し、触媒温度Tcが閾値Tcref以上のときには、第1所定運転ポイントに比してエンジン22からの出力が大きくなる範囲内で定められた浄化触媒134aの暖機用の第2所定運転ポイント(回転数Ne2およびトルクTe2)でエンジン22を継続して運転しながら走行用パワーPdrv*に基づくパワーによって走行するようエンジン22とモータMG1,MG2とを制御することにより、触媒温度Tcが閾値Tcref未満のときと触媒温度Tcが閾値Tcref以上のときとのそれぞれにおいて、走行用パワーPdrv*に応じてエンジン22の運転ポイントが変更されることによる不都合(例えば、エンジン22の燃焼が安定しにくくなるなど)を抑制しながら浄化触媒134aを暖機することができる。しかも、浄化触媒134aの暖機要求がなされていて触媒温度Tcが閾値Tcref以上のときには、触媒温度Tcが閾値Tcref未満のときに比してエンジン22から大きなパワーを出力しながら走行することができる。もとより、触媒暖機時のエミッションの悪化を抑制することができる。
According to the
また、実施例のハイブリッド自動車20によれば、浄化触媒134aの暖機要求がなされているときにおいて、触媒温度Tcが閾値Tcref未満で走行用パワーPdrv*がバッテリ出力可能パワー(k・Wout)より大きいときや、触媒温度Tcが閾値Tcref以上で走行用パワーPdrv*がバッテリ出力可能パワー(k・Wout)と触媒暖機パワーPsetとの和のパワー(k・Wout+Pset)より大きいときには、走行用パワーPdrv*からバッテリ出力可能パワー(k・Wout)を減じて得られるパワーをエンジン22から出力すべき要求パワーPe*として設定し、エンジン22から要求パワーPe*が出力されると共に走行用パワーPdrv*により走行するようエンジン22とモータMG1,MG2を制御することにより、走行用パワーPdrv*を要求パワーPe*として設定して制御するものに比して、エミッションの悪化を抑制しながら走行用パワーPdrv*を出力して走行することができる。
Further, according to the
実施例のハイブリッド自動車20では、浄化装置134の浄化触媒134aの温度を検出する温度センサ134bからの触媒温度Tcと閾値Tcrefとの比較によって浄化触媒134aの一部(例えば、上流側の端面周辺の部位など)が活性化しているか否かを判断するものとしたが、温度センサ134bを備えず、水温センサ142からの冷却水温Twや、エアフローメータ148からの吸入空気量Qaの積算値,温度センサ149からの吸気温Tinなどに基づいて浄化触媒134aの温度を推定し、この推定した温度を用いて浄化触媒134aの一部が活性化しているか否かを判断するものとしてもよい。また、水温センサ142からの冷却水温Twや、エアフローメータ148からの吸入空気量Qaの積算値,温度センサ149からの吸気温Tinなどを直接用いて、即ち、浄化触媒134aの温度を推定せずに、浄化触媒134aの一部が活性化しているか否かを判断するものとしてもよい。
In the
実施例のハイブリッド自動車20では、触媒暖機パワーPsetは、触媒温度Tcが閾値Tcref以上に至ったときのバッテリ50の入力制限Winである条件成立時入力制限Winsetに基づいて設定するものとしたが、第1所定運転ポイントに比してエンジン22からの出力が大きくなる範囲内で浄化触媒134aの暖機用に定められるものであればよく、条件成立時入力制限Winsetに加えてまたは代えて、他のパラメータ、例えば、触媒温度Tcが閾値Tcref以上に至ったときの車速Vである条件成立時車速Vsetや、触媒温度Tcが閾値Tcref以上に至ったときのアクセル開度Accである条件成立時アクセル開度Accset,触媒温度Tcが閾値Tcref以上に至ったときの要求トルクTr*である条件成立時要求トルクTrset,触媒温度Tcが閾値Tcref以上に至ったときの走行用パワーPdrv*である条件成立時走行用パワーPdrv*,触媒温度Tcが閾値Tcref以上に至ったときのブレーキペダルポジションBPである条件成立時ブレーキペダルポジションBPsetなどに基づいて定めるものとしてもよい。例えば、条件成立時車速Vsetに基づいて触媒暖機パワーPsetを設定する場合には、図12に例示する触媒暖機パワー設定用マップ、具体的には、条件成立時車速Vsetが低いほど触媒暖機パワーPsetが小さくなる傾向に定められたマップに対して条件成立時車速Vsetを適用して触媒暖機パワーPsetを設定すればよい。ここで、図12に示すマップの傾向は、条件成立時車速Vsetが低いほど触媒暖機中の走行用パワーPdrv*が小さくなりやすいことを考慮して、触媒暖機中に走行用パワーPdrv*に比して過剰なパワーがエンジン22から出力されるのを抑制するためである。同様に、条件成立時アクセル開度Accsetや条件成立時要求トルクTrset,条件成立時走行用パワーPdrvsetに基づいて触媒暖機パワーPsetを設定する場合には、条件成立時アクセル開度Accsetや条件成立時要求トルクTrset,条件成立時走行用パワーPdrvsetが小さいほど小さくなる傾向に条件成立時車速Vsetを設定すればよいし、条件成立時ブレーキペダルポジションBPsetに基づいて触媒暖機パワーPsetを設定する場合には、条件成立時ブレーキペダルポジションBPsetが大きいほど小さくなる傾向に触媒暖機パワーPsetを設定すればよい。また、複数のパラメータに基づいて触媒暖機パワーPsetを設定する場合には、各パラメータに対して設定した触媒暖機パワーPsetの仮の値のうち最小値を触媒暖機パワーPsetとして設定するものとしてもよい。さらに、触媒暖機用パワーPsetは、固定値を用いるものとしてもよい。
In the
実施例のハイブリッド自動車20では、触媒温度Tcが閾値Tcref以上に至ったときに、エンジン22の運転ポイントを第1所定運転ポイント(回転数Ne1およびトルクTe1)から第2所定運転ポイント(回転数Ne2およびトルクTe2)に切り替えるものとしたが、触媒温度Tcが閾値Tcref以上に至ってからエンジン22の運転ポイントを第1所定運転ポイントから第2所定運転ポイントまで徐々に変化させると共にエンジン22の運転ポイントが第2所定運転ポイントまで変化した以降は第2所定ポイントを保持するものとしてもよい。こうすれば、エンジン22の運転ポイントの急変を抑制することができる。この場合、触媒温度Tcが閾値Tcref以上に至ってからの時間の経過に従ってエンジン22の運転ポイントを第1所定運転ポイントから第2所定運転ポイントまで徐々に変化させると共にエンジン22の運転ポイントが第2所定運転ポイントまで変化した以降は第2所定ポイントを保持するものとしてもよいし、触媒温度Tcが閾値Tcref以上に至ってからの触媒温度Tcの上昇に従ってエンジン22の運転ポイントを第1所定運転ポイントから第2所定運転ポイントまで徐々に変化させると共にエンジン22の運転ポイントが第2所定運転ポイントまで変化した(触媒温度Tcが閾値Tcrefより高く活性化温度Tcactより低い閾値Tcref2に至った)以降は第2所定ポイントを保持するものとしてもよい。なお、エンジン22の運転ポイントを第1所定運転ポイントから第2所定運転ポイントに徐々に変化させる際には、エンジン22から出力すべき要求パワーPe*を第1パワー(Ne1・Te1)から触媒暖機パワーPset(=Ne2・Te2)まで徐々に変化させるものとしてもよい。
In the
実施例のハイブリッド自動車20では、浄化触媒134aの暖機要求がなされているときにおいて、触媒温度Tcが閾値Tcref以上のときには、エンジン22の点火時期を触媒暖機用点火時期から燃費用点火時期に向けて徐々に早くしていき、燃費用点火時期になってからはその時期を保持するものとしたが、触媒暖機用点火時期を保持するものとしてもよい。
In the
実施例のハイブリッド自動車20では、浄化触媒134aの暖機要求がなされていて触媒温度Tcが閾値Tcref未満のときにおいて、走行用パワーPdrv*がバッテリ出力可能パワー(k・Wout)以下のときには、第1所定運転ポイントでエンジン22を運転しながら走行用パワーPdrv*によって走行するようエンジン22とモータMG1,MG2とを制御し、走行用パワーPdrv*がバッテリ出力可能パワー(k・Wout)より大きいときには、走行用パワーPdrv*からバッテリ出力可能パワー(k・Wout)を減じて得られるパワーをエンジン22から出力すべき要求パワーPe*として設定してエンジン22を運転しながら走行用パワーPdrv*によって走行するようエンジン22とモータMG1,MG2とを制御するものとしたが、走行用パワーPdrv*がバッテリ出力可能パワー(k・Wout)以下であるか否かに拘わらず、第1所定運転ポイントでエンジン22を運転しながら走行用パワーPdrv*に基づくパワーによって走行するようエンジン22とモータMG1,MG2とを制御するものとしてもよい。なお、この場合、第1所定運転ポイントでエンジン22を運転したときのエンジン22からの出力パワー(例えば、略値0など)とバッテリ出力可能パワー(k・Wout)との和のパワー(k・Wout+Ne1・Te1)で走行用パワーPdrv*を制限したパワーを出力して走行することになる。同様に、実施例のハイブリッド自動車20では、浄化触媒134aの暖機要求がなされていて触媒温度Tcが閾値Tcref以上のときにおいて、走行用パワーPdrv*がバッテリ出力可能パワー(k・Wout)と触媒暖機パワーPsetとの和のパワー(k・Wout+Ne1・Te1)以下のときには、第2所定運転ポイントでエンジン22を運転しながら走行用パワーPdrv*によって走行するようエンジン22とモータMG1,MG2とを制御し、走行用パワーPdrv*がパワー(k・Wout+Ne1・Te1)より大きいときには、走行用パワーPdrv*からバッテリ出力可能パワー(k・Wout)を減じて得られるパワーをエンジン22から出力すべき要求パワーPe*として設定してエンジン22を運転しながら走行用パワーPdrv*によって走行するようエンジン22とモータMG1,MG2とを制御するものとしたが、走行用パワーPdrv*がパワー(k・Wout+Pset)以下であるか否かに拘わらず、第2所定運転ポイントでエンジン22を運転しながら走行用パワーPdrv*に基づくパワーによって走行するようエンジン22とモータMG1,MG2とを制御するものとしてもよい。なお、この場合、パワー(k・Wout+Pset)で走行用パワーPdrv*を制限したパワーを出力して走行することになる。
In the
実施例のハイブリッド自動車20では、モータMG2の動力を減速ギヤ35により変速してリングギヤ軸32aに出力するものとしたが、図13の変形例のハイブリッド自動車120に例示するように、モータMG2の動力をリングギヤ軸32aが接続された車軸(駆動輪63a,63bが接続された車軸)とは異なる車軸(図13における車輪64a,64bに接続された車軸)に出力するものとしてもよい。
In the
実施例のハイブリッド自動車20では、エンジン22からの動力を動力分配統合機構30を介して駆動輪63a,63bに接続された駆動軸としてのリングギヤ軸32aに出力すると共にモータMG2からの動力を減速ギヤ35を介してリングギヤ軸32aに出力するものとしたが、図14の変形例のハイブリッド自動車220に例示するように、駆動輪63a,63bに接続された駆動軸に変速機230を介してモータMGを取り付け、モータMGの回転軸にクラッチ229を介してエンジン22を接続する構成とし、エンジン22からの動力をモータMGの回転軸と変速機230とを介して駆動軸に出力すると共にモータMGからの動力を変速機230を介して駆動軸に出力するものとしてもよい。また、図15の変形例のハイブリッド自動車320に例示するように、エンジン22からの動力を変速機330を介して駆動輪63a,63bに接続された車軸に出力すると共にモータMGからの動力を駆動輪63a,63bが接続された車軸とは異なる車軸(図15における車輪64a,64bに接続された車軸)に出力するものとしてもよい。即ち、走行用の動力を出力する内燃機関と走行用の動力を出力する電動機とを備えるものであれば如何なるタイプのハイブリッド自動車としてもよいのである。
In the
実施例の主要な要素と課題を解決するための手段の欄に記載した発明の主要な要素との対応関係について説明する。実施例では、浄化触媒134aを有する浄化装置134が排気系に取り付けられたエンジン22が「内燃機関」に相当し、モータMG2が「電動機」に相当し、バッテリ50が「二次電池」に相当し、アクセル開度Accと車速Vとに基づいて要求トルクTr*を設定すると共に設定した要求トルクTr*にリングギヤ軸32aの回転数Nrを乗じたものに損失としてのロスLossを加えた値として走行用パワーPdrvを設定する図5の駆動制御ルーチンのステップS110の処理を実行するハイブリッド用電子制御ユニット70が「走行用パワー設定手段」に相当し、浄化触媒134aの暖機要求がなされているか否かを示す触媒暖機要求フラグFcが値1のときにおいて、触媒温度Tcが閾値Tcref未満のときには、浄化触媒134aの暖機用の第1所定運転ポイントとしての回転数Ne1およびトルクTe1をエンジン22の目標回転数Ne*および目標トルクTe*に設定すると共にその運転ポイントでエンジン22を継続して運転しながら走行用パワーPdrv*に基づくパワーによって走行するようモータMG1,MG2のトルク指令Tm1*,Tm2*を設定してエンジンECU24やモータECU40に送信し、触媒温度Tcが閾値Tcref以上のときには、第1所定運転ポイントに比してエンジン22からの出力が大きくなる範囲内で定められた浄化触媒134aの暖機用の第2所定運転ポイントとしての回転数Ne2およびトルクTe2をエンジン22の目標回転数Ne*および目標トルクTe*に設定すると共にその運転ポイントでエンジン22を継続して運転しながら走行用パワーPdrv*に基づくパワーによって走行するようモータMG1,MG2のトルク指令Tm1*,Tm2*を設定してエンジンECU24やモータECU40に送信する図5の駆動制御ルーチンのステップS120以降の処理を実行するハイブリッド用電子制御ユニット70と、目標回転数Ne*,目標トルクTe*を受信してエンジン22を制御するエンジンECU24と、トルク指令Tm1*,Tm2*を受信してモータMG1,MG2を駆動制御するモータECU40と、が「暖機時制御手段」に相当する。
The correspondence between the main elements of the embodiment and the main elements of the invention described in the column of means for solving the problems will be described. In the embodiment, the
ここで、「内燃機関」としては、ガソリンまたは軽油などの炭化水素系の燃料により動力を出力する内燃機関に限定されるものではなく、水素エンジンなど、走行用の動力を出力可能で排気浄化用の浄化触媒を有する浄化装置が排気系に取り付けられたものであれば如何なるタイプの内燃機関であっても構わない。「電動機」としては、同期発電電動機として構成されたモータMG2に限定されるものではなく、誘導電動機など、走行用の動力を出力可能なものであれば如何なるタイプの電動機であっても構わない。「二次電池」としては、リチウムイオン二次電池として構成されたバッテリ50に限定されるものではなく、ニッケル水素二次電池やニッケルカドミウム二次電池,鉛蓄電池など、電動機と電力のやりとりが可能なものであれば如何なるタイプの二次電池であっても構わない。「走行用パワー設定手段」としては、アクセル開度Accと車速Vとに基づいて要求トルクTr*を設定すると共に設定した要求トルクTr*にリングギヤ軸32aの回転数Nrを乗じたものに損失としてのロスLossを加えた値として走行用パワーPdrvを設定するものに限定されるものではなく、アクセル開度Accだけに基づいて要求トルクを設定すると共にこの要求トルクに基づいて走行用パワーを設定するものや走行経路が予め設定されているものにあっては走行経路における走行位置に基づいて要求トルクを設定すると共にこの要求トルクに基づいて走行用パワーを設定するものなど、走行に要求される走行用パワーを設定するものであれば如何なるものとしても構わない。「制御手段」としては、ハイブリッド用電子制御ユニット70とエンジンECU24とモータECU40とからなる組み合わせに限定されるものではなく単一の電子制御ユニットにより構成されるなどとしてもよい。また、「制御手段」としては、浄化触媒134aの暖機要求がなされているか否かを示す触媒暖機要求フラグFcが値1のときにおいて、触媒温度Tcが閾値Tcref未満のときには、浄化触媒134aの暖機用の第1所定運転ポイント(回転数Ne1およびトルクTe1)でエンジン22を継続して運転しながら走行用パワーPdrv*に基づくパワーによって走行するようエンジン22とモータMG1,MG2とを制御し、触媒温度Tcが閾値Tcref以上のときには、第1所定運転ポイントに比してエンジン22からの出力が大きくなる範囲内で定められた浄化触媒134aの暖機用の第2所定運転ポイント(回転数Ne2およびトルクTe2)でエンジン22を継続して運転しながら走行用パワーPdrv*に基づくパワーによって走行するようエンジン22とモータMG1,MG2とを制御するものに限定されるものではなく、浄化触媒の暖機要求がなされているときにおいて、浄化触媒の一部が活性化していると判断するための所定条件が成立するまでは、浄化触媒の暖機用の第1所定運転ポイントで内燃機関が継続して運転されながら走行用パワーに基づくパワーによって走行するよう内燃機関と電動機とを制御し、所定条件が成立した以降は、第1所定運転ポイントに比して内燃機関からの出力が大きくなる範囲内で定められた浄化触媒の暖機用の第2所定運転ポイントで内燃機関が継続して運転されながら走行用パワーに基づくパワーによって走行するよう内燃機関と電動機とを制御するものであれば如何なるものとしても構わない。
Here, the “internal combustion engine” is not limited to an internal combustion engine that outputs power using a hydrocarbon-based fuel such as gasoline or light oil. Any type of internal combustion engine may be used as long as the purification device having the purification catalyst is attached to the exhaust system. The “motor” is not limited to the motor MG2 configured as a synchronous generator motor, and may be any type of motor as long as it can output power for traveling, such as an induction motor. The “secondary battery” is not limited to the
なお、実施例の主要な要素と課題を解決するための手段の欄に記載した発明の主要な要素との対応関係は、実施例が課題を解決するための手段の欄に記載した発明を実施するための形態を具体的に説明するための一例であることから、課題を解決するための手段の欄に記載した発明の要素を限定するものではない。即ち、課題を解決するための手段の欄に記載した発明についての解釈はその欄の記載に基づいて行なわれるべきものであり、実施例は課題を解決するための手段の欄に記載した発明の具体的な一例に過ぎないものである。 The correspondence between the main elements of the embodiment and the main elements of the invention described in the column of means for solving the problem is the same as that of the embodiment described in the column of means for solving the problem. Therefore, the elements of the invention described in the column of means for solving the problems are not limited. That is, the interpretation of the invention described in the column of means for solving the problems should be made based on the description of the column, and the examples are those of the invention described in the column of means for solving the problems. It is only a specific example.
以上、本発明を実施するための形態について実施例を用いて説明したが、本発明はこうした実施例に何等限定されるものではなく、本発明の要旨を逸脱しない範囲内において、種々なる形態で実施し得ることは勿論である。 As mentioned above, although the form for implementing this invention was demonstrated using the Example, this invention is not limited at all to such an Example, In the range which does not deviate from the summary of this invention, it is with various forms. Of course, it can be implemented.
本発明は、ハイブリッド車の製造産業などに利用可能である。 The present invention can be used in the manufacturing industry of hybrid vehicles.
20,120,220,320 ハイブリッド自動車、22 エンジン、24 エンジン用電子制御ユニット(エンジンECU)、24a CPU、24b ROM、24c RAM、26 クランクシャフト、28 ダンパ、30 動力分配統合機構、31 サンギヤ、32 リングギヤ、32a リングギヤ軸、33 ピニオンギヤ、34 キャリア、35 減速ギヤ、40 モータ用電子制御ユニット(モータECU)、41,42 インバータ、43,44 回転位置検出センサ、50 バッテリ、51 温度センサ、52 バッテリ用電子制御ユニット(バッテリECU)、54 電力ライン、60 ギヤ機構、62 デファレンシャルギヤ、63a,63b 駆動輪、64a,64b 車輪、70 ハイブリッド用電子制御ユニット、72 CPU、74 ROM、76 RAM、80 イグニッションスイッチ、81 シフトレバー、82 シフトポジションセンサ、83 アクセルペダル、84 アクセルペダルポジションセンサ、85 ブレーキペダル、86 ブレーキペダルポジションセンサ、88 車速センサ、122 エアクリーナ、124 スロットルバルブ、126 燃料噴射弁、128 吸気バルブ、130 点火プラグ、132 ピストン、134 浄化装置、134a 浄化触媒、134b 温度センサ、135a 空燃比センサ、135b 酸素センサ、136,スロットルモータ、138 イグニッションコイル、140 クランクポジションセンサ、142 水温センサ、144 カムポジションセンサ、146 スロットルバルブポジションセンサ、148 エアフローメータ、149 温度センサ、150 可変バルブタイミング機構、229 クラッチ、230,330 変速機、MG,MG1,MG2 モータ。
20, 120, 220, 320 Hybrid vehicle, 22 engine, 24 engine electronic control unit (engine ECU), 24a CPU, 24b ROM, 24c RAM, 26 crankshaft, 28 damper, 30 power distribution and integration mechanism, 31 sun gear, 32 Ring gear, 32a Ring gear shaft, 33 pinion gear, 34 carrier, 35 reduction gear, 40 electronic control unit for motor (motor ECU), 41, 42 inverter, 43, 44 rotational position detection sensor, 50 battery, 51 temperature sensor, 52 for battery Electronic control unit (battery ECU), 54 power line, 60 gear mechanism, 62 differential gear, 63a, 63b drive wheel, 64a, 64b wheel, 70 hybrid electronic control unit, 72 CPU, 74 ROM, 76 AM, 80 ignition switch, 81 shift lever, 82 shift position sensor, 83 accelerator pedal, 84 accelerator pedal position sensor, 85 brake pedal, 86 brake pedal position sensor, 88 vehicle speed sensor, 122 air cleaner, 124 throttle valve, 126 fuel injection valve , 128 Intake valve, 130 Spark plug, 132 piston, 134 purification device, 134a purification catalyst, 134b temperature sensor, 135a air-fuel ratio sensor, 135b oxygen sensor, 136, throttle motor, 138 ignition coil, 140 crank position sensor, 142 water temperature sensor 144 Cam position sensor, 146 Throttle valve position sensor, 148 Air flow meter, 149 Temperature sensor, 150 Variable valve Timing mechanism 229 clutch, 230, 330 transmission, MG, MG1, MG2 motor.
Claims (6)
走行に要求される走行用パワーを設定する走行用パワー設定手段と、
前記浄化触媒の暖機要求がなされているときにおいて、前記浄化触媒の一部が活性化していると判断するための所定条件が成立するまでは、前記浄化触媒の暖機用の第1所定運転ポイントで前記内燃機関が継続して運転されながら前記設定された走行用パワーに基づくパワーによって走行するよう前記内燃機関と前記電動機とを制御し、前記所定条件が成立した以降は、前記第1所定運転ポイントに比して前記内燃機関からの出力が大きくなる範囲内で定められた前記浄化触媒の暖機用の第2所定運転ポイントで前記内燃機関が継続して運転されながら前記設定された走行用パワーに基づくパワーによって走行するよう前記内燃機関と前記電動機とを制御する暖機時制御手段と、
を備えるハイブリッド車。 An internal combustion engine in which a purification device capable of outputting power for traveling and having a purification catalyst for purifying exhaust gas is attached to an exhaust system, an electric motor capable of outputting power for traveling, and two electric power exchangeable with the electric motor A hybrid vehicle comprising:
Traveling power setting means for setting traveling power required for traveling;
A first predetermined operation for warming up the purification catalyst is performed until a predetermined condition for determining that a part of the purification catalyst is activated when a request for warming up the purification catalyst is made. The internal combustion engine and the electric motor are controlled so as to travel with power based on the set traveling power while the internal combustion engine is continuously operated at the point, and after the predetermined condition is satisfied, the first predetermined The set travel while the internal combustion engine is continuously operated at the second predetermined operation point for warming up the purification catalyst, which is determined within a range in which the output from the internal combustion engine is larger than the operation point. A warm-up control means for controlling the internal combustion engine and the electric motor so as to travel with power based on power for power;
A hybrid car with
前記内燃機関からの動力を用いて発電すると共に前記二次電池と電力のやりとりが可能な発電機と、
前記二次電池の状態に基づいて該二次電池に充電可能な最大許容電力である入力制限を設定する入力制限設定手段と、
を備え、
前記第2所定運転ポイントは、前記所定条件が成立したときの前記設定された入力制限が大きく制限されているほど小さくなる傾向に定められるパワーと、予め定められた所定制約と、に基づいて定められる運転ポイントである、
ハイブリッド車。 The hybrid vehicle according to claim 1,
A generator capable of generating power using power from the internal combustion engine and exchanging power with the secondary battery;
Input limit setting means for setting an input limit that is the maximum allowable power that can be charged to the secondary battery based on the state of the secondary battery;
With
The second predetermined operation point is determined on the basis of power determined to decrease as the set input restriction when the predetermined condition is satisfied is greatly limited, and predetermined predetermined constraints. Is a driving point,
Hybrid car.
前記第2所定運転ポイントは、前記所定条件が成立したときの車速が低いほど小さくなる傾向に定められるパワーと、予め定められた所定制約と、に基づいて定められる運転ポイントである、
ハイブリッド車。 The hybrid vehicle according to claim 1,
The second predetermined driving point is an operating point determined based on power determined to tend to decrease as the vehicle speed decreases when the predetermined condition is satisfied, and predetermined predetermined constraints.
Hybrid car.
前記二次電池の状態に基づいて該二次電池から放電可能な最大許容電力である出力制限を設定する出力制限設定手段を備え、
前記暖機時制御手段は、前記浄化触媒の暖機要求がなされているときにおいて、前記所定条件が成立するまでで前記設定された走行用パワーが前記設定された出力制限に相当するパワーと前記第1所定運転ポイントで前記内燃機関を運転したときに該内燃機関から出力されるパワーとの和より大きいとき、および、前記所定条件が成立した以降で前記設定された走行用パワーが前記設定された出力制限に相当するパワーと前記第2所定運転ポイントで前記内燃機関を運転したときに該内燃機関から出力されるパワーとの和より大きいときには、前記設定された走行用パワーから前記設定された出力制限に相当するパワーを減じて得られるパワーが前記内燃機関から出力されながら前記設定された走行用パワーによって走行するよう前記内燃機関と前記電動機とを制御する手段である、
ハイブリッド車。 A hybrid vehicle according to any one of claims 1 to 3,
An output limit setting means for setting an output limit that is the maximum allowable power that can be discharged from the secondary battery based on the state of the secondary battery;
The warm-up time control means is configured such that when the purification catalyst warm-up request is made, the set travel power until the predetermined condition is satisfied and the power corresponding to the set output limit and the power When the internal combustion engine is operated at the first predetermined operation point, the set travel power is set when the sum is greater than the sum of the power output from the internal combustion engine and after the predetermined condition is satisfied. When the internal combustion engine is operated at the second predetermined operating point and the power output from the internal combustion engine is greater than the sum corresponding to the output limit, The internal combustion engine travels with the set traveling power while the power obtained by reducing the power corresponding to the output restriction is output from the internal combustion engine. A means for controlling the said electric motor,
Hybrid car.
前記暖機時制御手段は、前記所定条件が成立した以降、前記内燃機関については、運転ポイントが前記第1所定運転ポイントから前記第2所定運転ポイントに徐々に変化しながら運転されると共に運転ポイントが前記第2所定運転ポイントまで変化した以降は該第2所定運転ポイントで運転されるよう制御する手段である、
ハイブリッド車。 A hybrid vehicle according to any one of claims 1 to 4,
After the predetermined condition is satisfied, the warm-up time control means operates the internal combustion engine while gradually changing the operation point from the first predetermined operation point to the second predetermined operation point. Is a means for controlling to be operated at the second predetermined operation point after changing to the second predetermined operation point.
Hybrid car.
前記所定条件は、前記浄化触媒の温度が該浄化触媒の一部が活性化していると想定される温度以上になる条件である、
ハイブリッド車。
A hybrid vehicle according to any one of claims 1 to 5,
The predetermined condition is a condition where the temperature of the purification catalyst becomes equal to or higher than a temperature at which a part of the purification catalyst is assumed to be activated.
Hybrid car.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013162530A JP2014012518A (en) | 2013-08-05 | 2013-08-05 | Hybrid vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013162530A JP2014012518A (en) | 2013-08-05 | 2013-08-05 | Hybrid vehicle |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010182463A Division JP5459144B2 (en) | 2010-08-17 | 2010-08-17 | Hybrid car |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2014012518A true JP2014012518A (en) | 2014-01-23 |
Family
ID=50108529
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013162530A Pending JP2014012518A (en) | 2013-08-05 | 2013-08-05 | Hybrid vehicle |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2014012518A (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017052500A (en) * | 2015-09-11 | 2017-03-16 | マツダ株式会社 | Generator drive engine mounted vehicle |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06257546A (en) * | 1993-03-05 | 1994-09-13 | Nissan Motor Co Ltd | Ignition timing adjustment system of internal combustion engine |
| JP2001263050A (en) * | 2000-03-21 | 2001-09-26 | Denso Corp | Control device for internal combustion engine |
| JP2005139920A (en) * | 2003-11-04 | 2005-06-02 | Honda Motor Co Ltd | Device for determining failure in catalyst heating control for internal combustion engine |
| JP2005320911A (en) * | 2004-05-10 | 2005-11-17 | Toyota Motor Corp | Power output device, automobile having the power output device, and method of controlling the power output device |
-
2013
- 2013-08-05 JP JP2013162530A patent/JP2014012518A/en active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06257546A (en) * | 1993-03-05 | 1994-09-13 | Nissan Motor Co Ltd | Ignition timing adjustment system of internal combustion engine |
| JP2001263050A (en) * | 2000-03-21 | 2001-09-26 | Denso Corp | Control device for internal combustion engine |
| JP2005139920A (en) * | 2003-11-04 | 2005-06-02 | Honda Motor Co Ltd | Device for determining failure in catalyst heating control for internal combustion engine |
| JP2005320911A (en) * | 2004-05-10 | 2005-11-17 | Toyota Motor Corp | Power output device, automobile having the power output device, and method of controlling the power output device |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017052500A (en) * | 2015-09-11 | 2017-03-16 | マツダ株式会社 | Generator drive engine mounted vehicle |
| US9970364B2 (en) | 2015-09-11 | 2018-05-15 | Mazda Motor Corporation | Vehicle including internal combustion engine for driving generator |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4183013B1 (en) | Vehicle and control method thereof | |
| JP5459144B2 (en) | Hybrid car | |
| JP2010179780A (en) | Hybrid vehicle and control method for the same | |
| JP2008296726A (en) | Hybrid vehicle and control method therefor | |
| JP2009062907A (en) | Internal combustion engine device, vehicle mounted thereon and control method of internal combustion engine device | |
| JP2010042700A (en) | Hybrid vehicle and its control method | |
| JP2009280094A (en) | Power output device and method of controlling the same, and vehicle | |
| JP5217991B2 (en) | Hybrid vehicle and control method thereof | |
| JP5716425B2 (en) | Hybrid car | |
| JP2012111408A (en) | Hybrid vehicle | |
| JP4730329B2 (en) | POWER OUTPUT DEVICE, ITS CONTROL METHOD, AND VEHICLE | |
| JP2010188935A (en) | Hybrid vehicle and control method | |
| JP2010247749A (en) | Hybrid car | |
| JP5494398B2 (en) | Hybrid car | |
| JP5644326B2 (en) | Hybrid car | |
| JP5352539B2 (en) | POWER OUTPUT DEVICE, ITS CONTROL METHOD, AND VEHICLE | |
| JP2010105626A (en) | Vehicle and control method therefor | |
| JP2007223403A (en) | Power output device, its control method, and vehicle | |
| JP2007309113A (en) | Power output device, vehicle mounted with the device and control method of power output device | |
| JP2014189081A (en) | Hybrid vehicle | |
| JP2009279965A (en) | Hybrid vehicle and method of controlling the same | |
| JP5330968B2 (en) | Vehicle and control method thereof | |
| JP5310492B2 (en) | INTERNAL COMBUSTION ENGINE DEVICE, ITS CONTROL METHOD, AND VEHICLE | |
| JP2011084202A (en) | Power output device, hybrid vehicle equipped with the same, and control method for the power output device | |
| JP4539675B2 (en) | POWER OUTPUT DEVICE, ITS CONTROL METHOD, AND VEHICLE |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140805 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141003 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20141111 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20150407 |