JP2013192590A - Motion analysis device and motion analysis method - Google Patents
Motion analysis device and motion analysis method Download PDFInfo
- Publication number
- JP2013192590A JP2013192590A JP2012059817A JP2012059817A JP2013192590A JP 2013192590 A JP2013192590 A JP 2013192590A JP 2012059817 A JP2012059817 A JP 2012059817A JP 2012059817 A JP2012059817 A JP 2012059817A JP 2013192590 A JP2013192590 A JP 2013192590A
- Authority
- JP
- Japan
- Prior art keywords
- bias
- angular velocity
- period
- value
- motion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000004458 analytical method Methods 0.000 title claims abstract description 61
- 238000005259 measurement Methods 0.000 claims abstract description 33
- 238000012937 correction Methods 0.000 claims abstract description 24
- 230000001133 acceleration Effects 0.000 claims description 26
- 238000000034 method Methods 0.000 claims description 12
- 230000008569 process Effects 0.000 claims description 9
- 238000012545 processing Methods 0.000 description 16
- 230000006870 function Effects 0.000 description 11
- 238000005070 sampling Methods 0.000 description 10
- 238000004364 calculation method Methods 0.000 description 9
- 238000004891 communication Methods 0.000 description 7
- 230000000052 comparative effect Effects 0.000 description 4
- 238000001514 detection method Methods 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 238000012886 linear function Methods 0.000 description 2
- 239000003550 marker Substances 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012544 monitoring process Methods 0.000 description 2
- 230000004913 activation Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000007789 sealing Methods 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
Images









Landscapes
- Gyroscopes (AREA)
- Length Measuring Devices With Unspecified Measuring Means (AREA)
Abstract
【課題】 運動期間前の静止期間だけで、角速度センサーのバイアス値を除去した運動解析を可能とする運動解析装置及び運動解析方法を提供すること。
【解決手段】 運動解析装置1は、測定対象物体10の角速度を検出する角速度センサー102x〜102zと、測定対象物体が静止状態である第1期間T1に角速度センサーから取得された出力信号に基づいて、角速度センサーの出力信号に含まれて時間とともに変化するバイアス値を、時間を関数とするバイアス推定値として求めるバイアス推定部202と、第1期間に続く第2期間T2に角速度センサーから取得された出力信号から、その出力信号と時間軸上で対応するバイアス推定値が除去された補正データに基づいて、測定対象物体の運動を解析する運動解析部204と、を有する。
【選択図】 図5PROBLEM TO BE SOLVED: To provide a motion analysis device and a motion analysis method capable of motion analysis in which a bias value of an angular velocity sensor is removed only in a stationary period before the motion period.
A motion analysis apparatus 1 is based on angular velocity sensors 102x to 102z that detect an angular velocity of a measurement target object 10 and an output signal acquired from the angular velocity sensor in a first period T1 in which the measurement target object is stationary. The bias estimation unit 202 that obtains a bias value that is included in the output signal of the angular velocity sensor and changes with time as a bias estimation value that is a function of time, and is acquired from the angular velocity sensor in the second period T2 following the first period. And a motion analysis unit 204 that analyzes the motion of the measurement target object based on correction data obtained by removing the bias estimate corresponding to the output signal and the time axis from the output signal.
[Selection] Figure 5
Description
本発明は、角速度センサーを用いた運動解析装置及び運動解析方法等に関する。 The present invention relates to a motion analysis apparatus and a motion analysis method using an angular velocity sensor.
様々な分野において被検査体の運動を解析する装置が必要とされている。例えば、テニスラケットやゴルフクラブのスイング軌道、野球のピッチングやバッティング等の運動フォーム等を解析し、解析結果から改善点を明らかにすることで競技力の向上につなげることができる。 There is a need for an apparatus for analyzing the motion of an object to be examined in various fields. For example, a tennis racket or a swing trajectory of a golf club, an exercise form such as baseball pitching or batting, etc. can be analyzed, and an improvement point can be clarified from the analysis result, thereby improving the competitiveness.
現在、実用的な運動解析装置としては、光学式モーションキャプチャー装置が知られている。この装置は、マーカーが取り付けられた測定対象物体を赤外線カメラ等で連続撮影し、撮影された連続画像を用いてマーカーの移動軌跡を算出することで、運動を解析するものが一般的である(特許文献1)。 At present, an optical motion capture device is known as a practical motion analysis device. This apparatus generally analyzes the motion by continuously capturing an object to be measured attached with a marker with an infrared camera or the like, and calculating the movement trajectory of the marker using the captured continuous image ( Patent Document 1).
これに対して、近年、被検査体に小型の慣性センサーを取り付け、測定対象物体の物理量を検出するセンサーの出力データから被検査体の運動を解析する装置が提案されている(特許文献2)。この装置は、赤外線カメラが不要であるため取り扱いが容易であるという利点がある。 On the other hand, in recent years, a device has been proposed in which a small inertia sensor is attached to an object to be inspected, and the motion of the object to be inspected is analyzed from output data of a sensor that detects a physical quantity of a measurement object (Patent Document 2). . This apparatus has the advantage that it is easy to handle because it does not require an infrared camera.
ここで、慣性センサーとして角速度センサー(ジャイロセンサー)を用いて測定対象物体の運動を解析する際に、角速度センサーのバイアスを除去する必要がある。バイアスとは、角速度が零である初期状態のときのゼロバイアスと、電源変動や温度変動などの外部要因に起因するランダムなドリフトとを含む誤差の総称である。 Here, when analyzing the motion of the measurement object using an angular velocity sensor (gyro sensor) as an inertial sensor, it is necessary to remove the bias of the angular velocity sensor. The bias is a generic term for errors including zero bias in an initial state where the angular velocity is zero and random drift caused by external factors such as power supply fluctuation and temperature fluctuation.
このバイアス値を求めるために、例えば運動期間の前後に静止期間を設定し、それぞれの静止期間中に角速度センサーから出力された信号に基づいて、運動期間中のバイアス値を推定することが考えられる。 In order to obtain the bias value, for example, a stationary period may be set before and after the exercise period, and the bias value during the exercise period may be estimated based on a signal output from the angular velocity sensor during each stationary period. .
しかし、この方法によればリアルタイムでの運動解析ができない。その上、運動の前後にて静止期間を設定しなければならないのでスムーズな計測がし難く、被験者の運動を伴う場合には被験者に与える規制が多く、利便性を損なう。 However, this method does not allow real-time motion analysis. In addition, since a stationary period must be set before and after the exercise, it is difficult to perform a smooth measurement, and when the subject is accompanied by an exercise, many restrictions are imposed on the subject, which impairs convenience.
そこで、本発明の幾つかの態様は、運動期間前に静止期間を設けるだけで、角速度センサーのバイアス値を除去した運動解析を可能とする運動解析装置及び運動解析方法を提供することを目的とする。 Therefore, some aspects of the present invention have an object to provide a motion analysis apparatus and a motion analysis method that enable motion analysis by removing the bias value of the angular velocity sensor only by providing a stationary period before the motion period. To do.
(1)本発明の一態様は、
測定対象物体の角速度を検出する角速度センサーと、
前記測定対象物体が静止状態である第1期間に前記角速度センサーから取得された出力信号に基づいて、前記角速度センサーの出力信号に含まれて時間とともに変化するバイアス値を、時間を関数とするバイアス推定値として求めるバイアス推定部と、
前記第1期間に続く第2期間に前記角速度センサーから取得された出力信号から、前記出力信号と前記時間軸上で対応する前記バイアス推定値が除去された補正データに基づいて、前記測定対象物体の運動を解析する運動解析部と、
を有する運動解析装置に関する。
(1) One aspect of the present invention is
An angular velocity sensor for detecting the angular velocity of the object to be measured;
Based on the output signal acquired from the angular velocity sensor during the first period in which the measurement target object is stationary, a bias value that is included in the output signal of the angular velocity sensor and changes with time is used as a function of time. A bias estimation unit to be obtained as an estimated value;
Based on the correction data obtained by removing the output signal and the estimated bias corresponding to the time axis from the output signal acquired from the angular velocity sensor in the second period following the first period, the measurement target object A motion analysis unit for analyzing the motion of
The present invention relates to a motion analysis apparatus having
ここで、測定対象物体が静止状態である第1期間に角速度センサーから取得された出力信号とは、角速度が零であることから、時間とともに変化するバイアス値のみである。本発明の一態様では、バイアス推定部が、第1期間に取得されたバイアス値(角速度センサー)から、時間を関数とするバイアス推定値を求める。第1期間に続く第2期間では、運動解析部が、角速度センサーから取得された出力信号から、その出力信号と時間軸上で対応するバイアス推定値が除去された補正データに基づいて、測定対象物体の運動を解析する。よって、第2期間(運動期間を含む)の前に第1期間(静止期間)を設けるだけで、第2期間に用いられるバイアス推定値を取得でき、角速度センサーのバイアス値を除去した運動解析が可能となる。しかも、運動期間後の静止期間を待たずに、運動解析をリアルタイムで実施することができる。 Here, since the angular velocity is zero, the output signal acquired from the angular velocity sensor during the first period in which the measurement target object is stationary is only a bias value that changes with time. In one aspect of the present invention, the bias estimation unit obtains a bias estimation value as a function of time from the bias value (angular velocity sensor) acquired in the first period. In the second period following the first period, the motion analysis unit measures the measurement object based on the correction data obtained by removing the output signal and the estimated bias corresponding to the time axis from the output signal acquired from the angular velocity sensor. Analyze the motion of an object. Therefore, just by providing the first period (stationary period) before the second period (including the exercise period), the bias estimation value used in the second period can be acquired, and the motion analysis with the bias value of the angular velocity sensor removed can be performed. It becomes possible. Moreover, motion analysis can be performed in real time without waiting for a rest period after the motion period.
(2)本発明の一態様では、前記バイアス推定部は、前記角速度センサーからの出力信号として時間軸上でサンプリングされたデータを、前記時間軸を含む二次元面で直線近似して、前記バイアス推定値を求めることができる。 (2) In one aspect of the present invention, the bias estimation unit linearly approximates data sampled on the time axis as an output signal from the angular velocity sensor on a two-dimensional plane including the time axis, and the bias An estimated value can be obtained.
こうすると、時間を関数とするバイアス推定値は一次関数となるので、角速度センサー出力から除算されるバイアス値をデータ補正部にて容易かつ高速に演算することができる。 In this way, the estimated bias value as a function of time is a linear function, and thus the bias value divided from the angular velocity sensor output can be easily and quickly calculated by the data correction unit.
(3)本発明の一態様では、一秒あたりの角速度(dps)であるバイアス推定値Vias(t)の直線近似式を、Vias(t)=a×t+bとしたとき、前記バイアス推定部は、傾きaがしきい値よりも小さくなった時に前記バイアス推定値を確定することができる。 (3) In one aspect of the present invention, when the linear approximation formula of the bias estimated value Vias (t) which is the angular velocity per second (dps) is Vias (t) = a × t + b, the bias estimating unit When the slope a becomes smaller than the threshold value, the estimated bias value can be determined.
固定の静止期間あるいは短い静止期間にて得られた角速度センサー出力に基づくと、バイアス推定値を適切に設定できないことがある。角速度センサーのバイアス安定性や外部要因に依存して、適切でないバイアス推定値とは、角速度センサーのバイアスドリフトが大きく、Vias(t)=a×t+bの式中の傾きaが過大となる場合である。そこで、最初の静止期間にて得られた角速度センサー出力に基づいて取得されたバイアス推定値の傾きをしきい値と比較して、傾きaが信頼できるものであるか評価することができる。傾きaがしきい値よりも小さければ、信頼性のあるバイアス値として確定できる。もし、傾きaがしきい値よりも大きければ、静止期間の長さを延長してバイアス推定値を再取得し、評価すればよい。 Based on the angular velocity sensor output obtained in a fixed stationary period or a short stationary period, the estimated bias value may not be set appropriately. Depending on the bias stability of the angular velocity sensor and external factors, an improper bias estimation value is a case where the bias drift of the angular velocity sensor is large and the slope a in the formula Vias (t) = a × t + b is excessive. is there. Therefore, it is possible to evaluate whether or not the inclination a is reliable by comparing the inclination of the bias estimated value obtained based on the angular velocity sensor output obtained in the first stationary period with a threshold value. If the slope a is smaller than the threshold value, it can be determined as a reliable bias value. If the slope a is larger than the threshold value, the length of the stationary period may be extended to reacquire the estimated bias value and evaluate it.
(4)本発明の一態様では、前記バイアス推定部は、前記傾きaがa≦0.010となった時に前記バイアス推定値を確定することができる。 (4) In one aspect of the present invention, the bias estimation unit can determine the bias estimation value when the slope a becomes a ≦ 0.010.
こうすると、運動期間の前後に静止期間を設けて得られたバイアス推定値に近いバイアス推定値を得ることができる。 In this way, it is possible to obtain a bias estimated value close to a bias estimated value obtained by providing a stationary period before and after the exercise period.
(5)本発明の一態様では、前記バイアス推定部は、前記傾きaがa≦0.005となった時に前記バイアス推定値を確定することができる。 (5) In one aspect of the present invention, the bias estimation unit can determine the bias estimation value when the slope a is a ≦ 0.005.
こうすると、運動期間の前後に静止期間を設けて得られたバイアス推定値により近いバイアス推定値を得ることができる。 In this way, it is possible to obtain an estimated bias value closer to the estimated bias value obtained by providing a stationary period before and after the exercise period.
(6)本発明の一態様では、前記バイアス推定部にて前記バイアス推定値が確定された時以降に、運動開始を告知する告知部をさらに有することができる。 (6) In one mode of the present invention, it can further have a notification part which notifies the start of exercise after the bias estimation value is decided in the bias estimation part.
バイアス推定値を得る必要上、運動を開始する前に静止期間が必要となり、その静止期間を終了して運動を開始させる告知を、バイアス推定値の確定タイミングに基づいて行うことができる。 Since it is necessary to obtain the bias estimated value, a stationary period is required before the exercise is started, and a notification for ending the stationary period and starting the exercise can be performed based on the determination timing of the bias estimated value.
(7)本発明の一態様では、前記運動解析部は、前記補正データ及び前記補正データの積分値に基づいて前記測定対象物体の運動を解析することができる。 (7) In one aspect of the present invention, the motion analysis unit can analyze the motion of the measurement target object based on the correction data and an integrated value of the correction data.
測定対象物体の運動のうち、角速度センサー出力を補正して得た角速度と、それを積分して得た角度とにより分析できる。しかも、測定対象物体の運動を、バイアス値を除去して精度よく解析することができる。 Among the movements of the object to be measured, it can be analyzed by the angular velocity obtained by correcting the output of the angular velocity sensor and the angle obtained by integrating it. In addition, the motion of the measurement target object can be analyzed with high accuracy by removing the bias value.
(8)本発明の一態様では、前記運動解析部は、前記角速度センサーの出力信号が入力される順にリアルタイムで前記測定対象物体の運動を解析することができる。つまり、本発明の一態様では運動期間後の静止期間を待つことなくバイアス推定値が得られるので、運動解析をリアルタイムで実施することができる。 (8) In one aspect of the present invention, the motion analysis unit can analyze the motion of the measurement target object in real time in the order in which the output signal of the angular velocity sensor is input. That is, in one embodiment of the present invention, a bias estimation value can be obtained without waiting for a stationary period after an exercise period, so that an exercise analysis can be performed in real time.
(9)本発明の一態様では、
前記測定対象物体の加速度を検出する加速度センサーをさらに有し、
前記運動解析部は、前記加速度センサーの出力信号及び記加速度センサーの出力信号のm(mは自然数)階積分値に基づいて前記測定対象物体の運動を解析することができる。
(9) In one embodiment of the present invention,
An acceleration sensor for detecting an acceleration of the measurement object;
The motion analysis unit can analyze the motion of the measurement target object based on m (m is a natural number) floor integral value of the output signal of the acceleration sensor and the output signal of the acceleration sensor.
運動解析データとして、角速度または角度以外に、加速度センサーの出力として加速とが得られ、加速度をm階積分することで速度や位置が得られるので、測定対象物体の運動解析を緻密に行うことができる。 As motion analysis data, acceleration is obtained as an output of the acceleration sensor in addition to angular velocity or angle, and velocity and position can be obtained by integrating the acceleration m-th order, so that the motion analysis of the object to be measured can be performed precisely. it can.
(10)本発明の他の態様は、
測定対象物体が静止状態である第1期間に、前記測定対象物体に取り付けられた角速度センサーからの出力信号を取得する工程と、
前記第1期間に取得された前記角速度センサーの出力信号に含まれて時間とともに変化するバイアス値を、時間を関数とするバイアス推定値として求める工程と、
前記第1期間に続く第2期間に前記角速度センサーの出力信号を取得する工程と、
前記第2期間に取得された前記角速度センサーの出力信号から、前記出力信号と前記時間軸上で対応する前記バイアス推定値が除去された補正データに基づいて、前記測定対象物体の運動を解析する工程と、
を有する運動解析方法に関する。
(10) Another aspect of the present invention is:
Obtaining an output signal from an angular velocity sensor attached to the measurement target object in a first period in which the measurement target object is stationary;
Obtaining a bias value included in an output signal of the angular velocity sensor acquired in the first period and changing with time as a bias estimation value having a function of time;
Obtaining an output signal of the angular velocity sensor in a second period following the first period;
The motion of the measurement target object is analyzed based on correction data obtained by removing the bias estimation value corresponding to the output signal and the time axis from the output signal of the angular velocity sensor acquired in the second period. Process,
It is related with the motion analysis method which has.
本発明の他の態様でも、第2期間(運動期間を含む)の前に第1期間(静止期間)を設けるだけで、第2期間に用いられるバイアス推定値を取得でき、角速度センサーのバイアス値を除去した運動解析が可能となる。しかも、運動期間後の静止期間を待たずに、運動解析をリアルタイムで実施することができる。 In another aspect of the present invention, the bias estimated value used in the second period can be obtained simply by providing the first period (stationary period) before the second period (including the exercise period), and the bias value of the angular velocity sensor It is possible to analyze the motion without removing the. Moreover, motion analysis can be performed in real time without waiting for a rest period after the motion period.
以下、本発明の好適な実施の形態について詳細に説明する。なお以下に説明する本実施形態は特許請求の範囲に記載された本発明の内容を不当に限定するものではなく、本実施形態で説明される構成の全てが本発明の解決手段として必須であるとは限らない。 Hereinafter, preferred embodiments of the present invention will be described in detail. The present embodiment described below does not unduly limit the contents of the present invention described in the claims, and all the configurations described in the present embodiment are indispensable as means for solving the present invention. Not necessarily.
1.運動解析装置の概要
運動解析情報収集装置100は、図1に示すように、測定対象物体である例えばゴルフクラブ10に取り付けられた角速度センサーを含むセンサーユニット20と、バイアス推定部及び運動解析部とを含むホスト端末200とを有する。
1. Outline of Motion Analysis Device As shown in FIG. 1, the motion analysis
1.1.センサーユニット
ここで、運動解析装置1の運動解析情報の対象は、図1に示す被験者により操作されるゴルフクラブ10である。図1は、被験者により操作されるゴルフクラブ10のクラブヘッド11のスイング軌跡Aを示している。スイング軌跡Aは、スイング起動位置P1、トップ位置P2、インパクト位置P3及びフォロースルートップ位置P4を含んでいる。
1.1. Sensor Unit Here, the target of the motion analysis information of the motion analysis device 1 is the
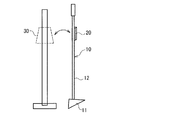
図2には、本実施形態に用いられるセンサーユニット20が装着されたゴルフクラブ10と、ゴルフクラブ10の保持具例えば充電器30が示されている。充電器30は、センサーユニット20に内蔵されるセンサーに給電する二次電池を充電する。
FIG. 2 shows a
図2は、センサーユニット20がクラブシャフト12に装着されたゴルフクラブ10を模式的に示している。充電器30は、スタンド型であり、クラブシャフト12を静止状態に保持して、後述する接点を介してセンサーユニット20内の二次電池を充電することができる。センサーユニット20が取り付けられる位置は、クラブシャフト12に限らず、例えばクラブヘッド11などであってもよい。また、センサーユニット20は必ずしもゴルフクラブ10に装着されるものに限らず、被験者に取り付けられてもよい。
FIG. 2 schematically shows the
センサーユニット20は、所与の物理量を検出し、検出した物理量(例えば、加速度、角速度、速度、角加速度など)の大きさに応じた信号(データ)を出力することができる。本実施形態では、センサーユニット20は、図3に示すように、X軸、Y軸、Z軸方向の加速度を検出する三軸検出型の加速度センサー102x〜102z(慣性センサーの一例。以下、三軸加速度センサーと称す。)と、X軸、Y軸、Z軸方向の角速度を検出する三軸検出型のジャイロセンサー(角速度センサー、慣性センサーの一例。以下、三軸ジャイロセンサー称す。)104x〜104zとからなる6軸検出型のモーションセンサーを備えている。
The
ここで、三軸ジャイロセンサー(角速度センサー)104x〜104zは、振動型角速度センサーを用いることができる。振動型角速度センサーは、振動体を一定の周波数で振動させる。振動体に角速度が加わるとコリオリ力が発生し、コリオリ力によって振動体が異なる方向に振動する。このコリオリ力による変位を検知することで角速度を検出することができる。例えば、角速度センサー素子を減圧封止することで、振動型角速度センサー素子のQ値が大きくなり、バイアス安定性の優れた角速度を検出することができる(例えば、特開2010−203990)。 Here, as the three-axis gyro sensors (angular velocity sensors) 104x to 104z, vibration-type angular velocity sensors can be used. The vibration type angular velocity sensor vibrates the vibrating body at a constant frequency. When an angular velocity is applied to the vibrating body, a Coriolis force is generated, and the vibrating body vibrates in different directions due to the Coriolis force. The angular velocity can be detected by detecting the displacement due to the Coriolis force. For example, by sealing the angular velocity sensor element under reduced pressure, the Q value of the vibration type angular velocity sensor element is increased, and an angular velocity with excellent bias stability can be detected (for example, JP 2010-203990 A).
図3に示す制御部110は、各センサー102x〜102z及び104x〜104zと、通信部120と、二次電池130とに接続されている。制御部110はさらに、充電器30に接続可能である。
The
制御部110は、各センサー102x〜102z及び104x〜104zの出力信号を、例えば時刻情報と共にパケットにして通信部120に出力するデータ処理部110Aを有する。図3に示す通信部118は、データ処理部110Aから受け取ったパケットデータをホスト端末300に送信する処理を行う。制御部110は、二次電池130を充電制御する充電制御部110Bを有することができる。
The
図4は、図2に示す充電器30及び測定対象の運動器具(ゴルフクラブ)10の基本的構成例を示している。保持具として機能する充電器30は、接地部31と、接地部31から上方に延びるシャフト保持部32と、例えば接地部31に設けられた充電回路33と、シャフト保持部32に設けられた2つの充電端子34,35を有している。ゴルフクラブ10は、充電器30の充電端子34,35に接触する被充電端子13,14を、クラブシャフト12に有する。なお、ゴルフクラブ10に設けられるセンサーユニット20は図4では図示が省略されている。
FIG. 4 shows a basic configuration example of the
1.2.ホスト端末
図5はホスト端末200を示している。ホスト端末200は、処理部(CPU)201、通信部210、操作部220、ROM230、RAM240、不揮発性メモリー250、表示部260及び告知部270を含んで構成されている。
1.2. Host Terminal FIG. 5 shows a
通信部210は、センサーユニット20から送信された信号を受信し、処理部201に送る処理を行う。操作部220は、ユーザーからの操作データを取得し、処理部201に送る処理を行う。ROM230は、処理部201が各種の計算処理や制御処理を行うためのプログラムや、アプリケーション機能を実現するための各種プログラムやデータ等を記憶している。RAM240は、処理部201の作業領域として用いられ、ROM230から読み出されたプログラムやデータ、操作部220から入力されたデータ、処理部201が各種プログラムに従って実行した演算結果等を一時的に記憶する記憶部である。なお、本実施形態では特に、後述する図7に示す初期位置P0やインパクト位置P3についての既知のデータを、ROM230またはRAM240に記憶しておくことができる。不揮発性メモリー250は、処理部201の処理により生成されたデータのうち、長期的な保存が必要なデータを記録する記憶部である。表示部260は、処理部201の処理結果を文字やグラフ、その他の画像として表示するものである。表示部260は、例えば、CRT、LCD、タッチパネル型ディスプレイ、HMD(ヘッドマウントディスプレイ)などである。なお、1つのタッチパネル型ディスプレイで操作部220と表示部260の機能を実現するようにしてもよい。告知部270は、被験者に運動を開始してもよい旨を告知する。
The
処理部201は、ROM230に記憶されているプログラムに従って、センサーユニット20から通信部210を介して受信したデータに対する各種の計算処理や、各種の制御処理(表示部260に対する表示制御等)を行う。特に、本実施形態では、処理部201は、バイアス推定部202と運動解析部204を含んでいる運動解析部204は、データ補正部206及び演算部208として機能することができる。
The
バイアス推定部202は、ゴルフクラブ10が静止状態である時に角速度センサー104x〜104zから取得された出力信号に基づいて、角速度センサーの出力信号104x〜104zに含まれて時間とともに変化するバイアス値を、時間を関数とするバイアス推定値とする。運動解析部204では、ゴルフクラブ10の静止期間に続く運動期間に角速度センサー104x〜104zから取得された出力信号から、その出力信号と時間軸上で対応するバイアス推定値をデータ補正部206にて除去して補正データを生成し、演算部208が補正データに基づいてゴルフクラブ10の運動を解析する。なお、演算部208は、加速度センサー104x〜104zからの出力信号に基づいてゴルフクラブ10の運動を解析することができる。
Based on the output signals acquired from the
2.運動解析方法
以下、運動解析方法を図6〜図10も参照して説明する。図6のスタート時には、ゴルフクラブ10は図4に示す充電器30に装着され静止状態である。このとき、センサーユニット20は、図7に示す既知の始点P0(充電器30の位置)にあり、加速度及び角速度は共に零である。これらは、始点P0での既知のデータとなる。
2. Motion Analysis Method Hereinafter, the motion analysis method will be described with reference to FIGS. At the start of FIG. 6, the
2.1.バイアス推定値の取得工程
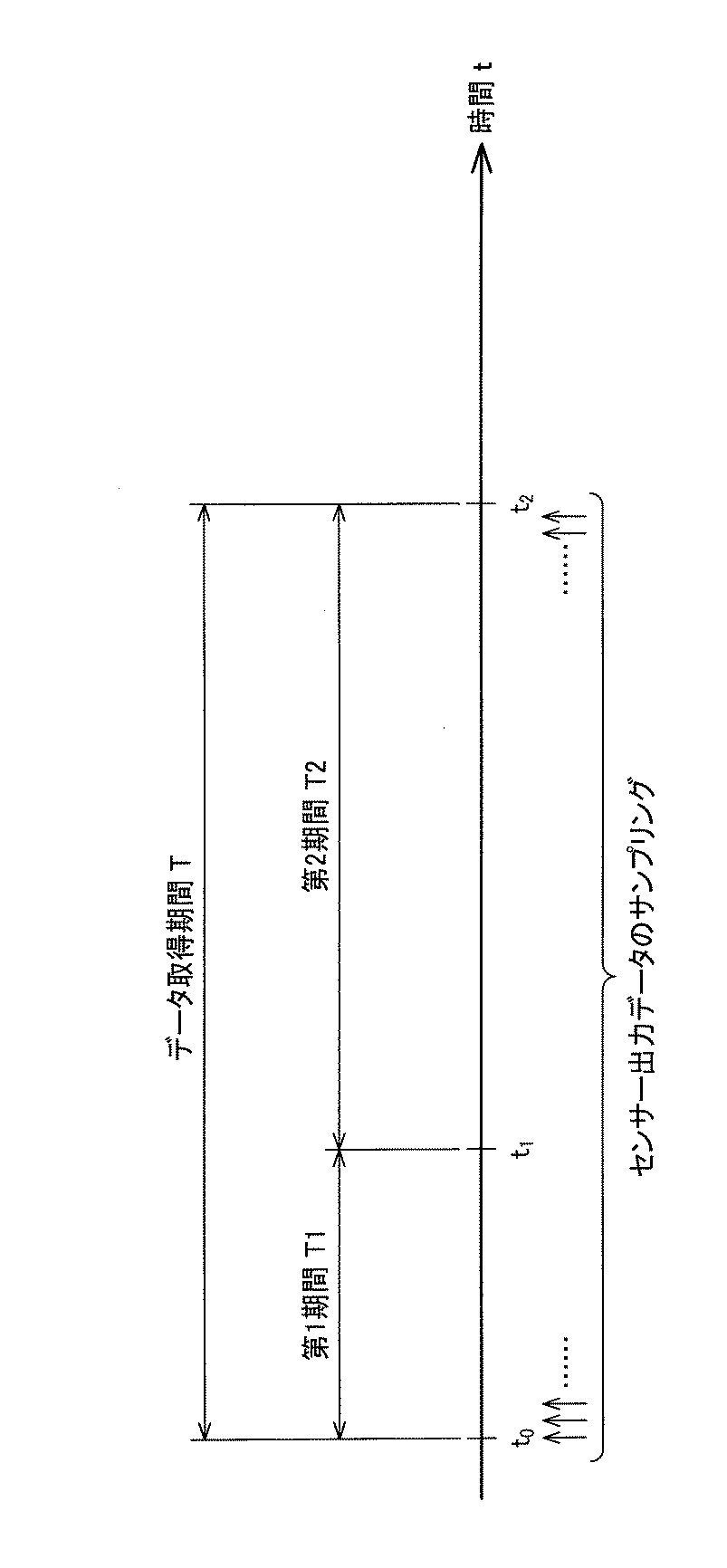
図8のステップS1では、図8のスタート時t0から、ゴルフクラブ10が充電器30に装着されている静止状態でのセンサーユニット20から出力信号を取得する。つまり、図8のスタート時t0から、静止状態にてセンサー出力データを所定のサンプリング周波数でサンプリングして取得する。特に、三軸ジャイロセンサー104x〜104zから、例えばサンプリング時刻情報と共に角速度データが取得される。この静止状態では角速度は零であるが、取得された角速度データは零ではなく、時間とともに変化するバイアス値が含まれている。
2.1. Step S1 in FIG. 8 In step S1 in FIG. 8, an output signal is acquired from the
図8のステップS2では、静止期間に取得された三軸ジャイロセンサー104x〜104zからの出力信号に基づいて、図5のバイアス推定部202が、時間を関数とするバイアス推定値を求める。
In step S <b> 2 of FIG. 8, the
バイアス推定部202は、例えば三軸ジャイロセンサー104x〜104zからの出力信号として時間軸上でサンプリングされたデータを、時間軸を含む二次元面で直線近似してバイアス推定値を求めることができる。
The
図9は、直線近似によりバイアス推定値を求める手法を示している。図9において、横軸は時間tであり、縦軸は角速度を毎秒あたりの角度(dps)として示している。図9では、時間x1〜xnのn回のサンプリング時に角速度y1〜ynが取得されたことを示している。 FIG. 9 shows a technique for obtaining a bias estimated value by linear approximation. In FIG. 9, the horizontal axis represents time t, and the vertical axis represents the angular velocity as an angle per second (dps). FIG. 9 shows that the angular velocities y1 to yn are acquired at the time of sampling n times from time x1 to xn.
バイアス推定部202は、三軸ジャイロセンサー104x〜104zからの出力信号として時間軸上でサンプリングされたn個のデータ(x1,y1)、(x2,y2)、…(xn,yn)を、時間軸を含む二次元面(x−y)で直線近似されたy=a×x+bを、時間を関数とするバイアス推定値として求める。換言すれば、静止状態での三軸ジャイロセンサー104x〜104zからの出力信号y1〜ynは時刻x1〜xnに対応するバイアス値を示すことになるので、上記式は、バイアス推定値をVias(t)とし、時刻をtとすると、一秒あたりの角速度(dps)であるバイアス推定値Vias(t)は、
Vias(t)=a×t+b…(1)
と表すことができる。バイアス推定値Vias(t)は、X,Y,Z軸についてそれぞれ求められる。
The
Vias (t) = a × t + b (1)
It can be expressed as. The estimated bias value Vias (t) is obtained for each of the X, Y, and Z axes.
ここで、式(1)の係数a及びbは、n個のデータ(x1,y1)、(x2,y2)、…(xn,yn)に基づいて、最小二乗法では次のように求められる。 Here, the coefficients a and b in Expression (1) are obtained as follows in the least square method based on n pieces of data (x1, y1), (x2, y2),... (Xn, yn). .
ここで、式(1)の係数a,bは、サンプリング個数(サンプリング時間)に依存することが分かる。そこで、本発明者は異なるサンプリング時間についてそれぞれ式(1)のバイアス推定値を求めた。その実験データを図10(A)〜図10(F)に示す。図10(A)〜図10(F)の横軸は時間であり、0秒から10000msec(10sec)が示されている。縦軸は角速度(dps)である。 Here, it can be seen that the coefficients a and b in Expression (1) depend on the number of samplings (sampling time). Therefore, the present inventor obtained the bias estimation value of the equation (1) for each of different sampling times. The experimental data are shown in FIGS. 10 (A) to 10 (F). In FIG. 10A to FIG. 10F, the horizontal axis represents time, and 0 to 10000 msec (10 sec) is shown. The vertical axis represents angular velocity (dps).
図10(A)は比較例を示している。図10(A)は、本発明とは異なり、運動期間を例えば1000−9000msec内としたとき、運動期間の前に設定された第1静止期間1秒(1−1000mesc)と、運動期後に設定された第2静止期間1秒(9000−10000mesc)とを設定している。図10(A)では第1静止期間に三軸ジャイロセンサー104x〜104zから取得された出力信号の平均値と、第2静止期間に三軸ジャイロセンサー104x〜104zから取得された出力信号の平均値とを直線で結んで、バイアス推定値としている。この場合、運動期間後の第2静止期間を待たなければバイアス推定値は求められないので、リアルタイムでの運動解析ができない。その上、運動期間の前後にて第1,第2静止期間を設定しなければならないのでスムーズな計測がし難く、被験者の運動を伴う場合には被験者に与える規制が多く、利便性を損なう。
FIG. 10A shows a comparative example. 10A, unlike the present invention, when the exercise period is within 1000-9000 msec, for example, the first stationary period 1 second (1-1000 mesc) set before the exercise period and the post-exercise period are set. The second stationary period of 1 second (9000-10000 mesc) is set. In FIG. 10A, the average value of the output signals acquired from the
図10(B)〜図10(E)では、運動期間前の静止期間の長さを変えてバイアス推値を求めている。図10(B)では、運動期間の前に設定された静止期間1秒(1−1000mesc)の間に三軸ジャイロセンサー104x〜104zから取得された出力信号に基づいて、式(1)のバイアス推定値を求めたものである。1秒のサンプリング期間では、式(1)の傾きaが図10(B)のように大きくなることがある。そこで、図10(C)に示すように運動期間の前に設定された静止期間を2秒(1−2000mesc)とし、あるいは図10(D)に示すように運動期間の前に設定された静止期間を3秒(1−3000mesc)とすると、バイアスドリフトが安定して、式(1)の傾きaを小さくすることができた。なお、図10(E)では、図10(B)と同じく静止期間を1秒とし、静止期間の位置を2000−3000msecに移動させてみたが、図10(A)と同様に式(1)の傾きaが大きくなることがある。
10B to 10E, the bias estimation value is obtained by changing the length of the stationary period before the exercise period. In FIG. 10B, the bias of equation (1) is based on the output signals acquired from the
このように、運動期間の前に設定される静止期間を少なくとも2秒以上確保してバイアス推定値を求めれば、運動期間後に静止期間を設定しなくても適切なバイアス推定値が求められることが分かる。 As described above, if a bias estimation value is obtained by securing a stationary period set before the exercise period for at least 2 seconds or more, an appropriate bias estimation value can be obtained without setting the stationary period after the exercise period. I understand.
運動期間の前に設定される静止期間(バイアス推定時間)の長さは、三軸ジャイロセンサー104x〜104zのバイアス安定性に依存する。三軸ジャイロセンサー104x〜104zとしては、上述したように、例えば角速度センサー素子を減圧封止したバイアス安定性の高い振動型角速度センサーを用いることができる。
The length of the stationary period (bias estimation time) set before the exercise period depends on the bias stability of the three-
ここで、運動期間の前に設定される静止期間(バイアス推定時間)の長さは、三軸ジャイロセンサー104x〜104zのバイアス安定性等に依存し、あるいは外的要因にも依存するため、可変してもよい。
Here, the length of the stationary period (bias estimation time) set before the exercise period depends on the bias stability of the three-
このために、得られたバイアス推定値を評価し、例えば式(1)中の傾きaの大きさをしきい値と比較して評価することができる。このようにすることで、バイアス推定値の信頼性を高めることができる。 For this purpose, the obtained estimated bias value can be evaluated, for example, by comparing the magnitude of the slope a in the equation (1) with a threshold value. By doing in this way, the reliability of a bias estimated value can be improved.
ここで、図10(A)〜図10(D)にて求められたバイアス推定値の式(1)の傾きaから、しきい値について考察する。図10(A)〜図10(D)にて求められたバイアス推定値の式(1)の傾きaは、X,Y,Zの各軸について以下の値であった。 Here, the threshold value is considered from the slope a of the formula (1) of the estimated bias value obtained in FIGS. 10 (A) to 10 (D). The slope a of the bias estimated value equation (1) obtained in FIGS. 10A to 10D was the following value for each of the X, Y, and Z axes.
X Y Z
図10(A) −0.0008 −0.0013 −0.0008
図10(B) −0.0448 −0.0008 +0.0147
図10(C) −0.0120 −0.0073 +0.0010
図10(D) +0.0001 +0.0029 −0.0032
図10(A)〜図10(D)にて求められたバイアス推定値の式(1)の傾きaを評価すると、図10(C)(D)が有効である場合にはa≦0.010とすることができる。この場合、図(B)に示すように1秒の静止期間で得られたバイアス推定値は不採用となり、図10(C)に示すように静止期間を2秒として得られたバイアス推定値が確定値となる。しきい値をこのように設定すると、図10(A)に示すように運動期間の前後に静止期間を設けて得られた比較例のバイアス推定値に近いバイアス推定値を得ることができる。
XYZ
FIG. 10 (A) −0.0008 −0.0013 −0.0008
FIG.10 (B) -0.0448 -0.0008 +0.0147
FIG.10 (C) -0.0120 -0.0073 +0.0010
FIG.10 (D) +0.0001 +0.0029 -0.0032
When the inclination a of the formula (1) of the bias estimation value obtained in FIGS. 10A to 10D is evaluated, when FIGS. 10C and 10D are valid, a ≦ 0. 010. In this case, as shown in FIG. 10B, the estimated bias value obtained in the stationary period of 1 second is not adopted, and the estimated bias value obtained by setting the stationary period as 2 seconds as shown in FIG. It becomes a definite value. When the threshold value is set in this way, a bias estimated value close to the bias estimated value of the comparative example obtained by providing a stationary period before and after the exercise period as shown in FIG. 10A can be obtained.
図10(D)が有効である場合にはa≦0.005とすることができる。この場合、図(B)(C)に示すように1秒及び2秒の各静止期間で得られたバイアス推定値は不採用となり、図10(D)に示すように静止期間を3秒として得られたバイアス推定値が確定値となる。しきい値をこのように設定すると、図10(A)に示すように運動期間の前後に静止期間を設けて得られた比較例のバイアス推定値により近いバイアス推定値を得ることができる。 When FIG. 10D is valid, a ≦ 0.005 can be satisfied. In this case, as shown in FIGS. (B) and (C), the estimated bias values obtained in the 1-second and 2-second stationary periods are not adopted, and the stationary period is set to 3 seconds as shown in FIG. 10 (D). The obtained bias estimated value becomes a definite value. When the threshold value is set in this way, a bias estimated value closer to the bias estimated value of the comparative example obtained by providing a stationary period before and after the exercise period as shown in FIG. 10A can be obtained.
以上のようにして、図8のステップS3にてバイアス推定値が確定されるまで繰り返しステップS2を実施するようにしてもよい。あるいは、上述した通り、一定の静止期間中に得られたバイアス推定値を確定値とすることもできる。 As described above, step S2 may be repeatedly performed until the estimated bias value is determined in step S3 of FIG. Or as above-mentioned, the bias estimated value obtained during the fixed stationary period can also be made into a definite value.
2.2.運動解析工程
図8のステップS4では、図5に示す告知部270が、バイアス推定部202にてバイアス推定値が確定された時以降に、運動開始を告知することができる。この告知は、表示または音声にて行なうことができる。
2.2. Exercise Analysis Step In step S4 of FIG. 8, the
図8のステップS5では、ゴルフクラブ10が充電器30から離脱されたか否かが監視される。ゴルフクラブ10が充電器30から離脱されたことは、図3及び図4に示すゴルフクラブ10の接点13,14の電圧等を図3の制御部110が監視することで判明する。制御部110にてゴルフクラブ10が充電器30から離脱されたこと取得されると(図8のステップS5での判断がYES)、ステップS6に移行する。図8のステップS6では、図6の第1期間(静止期間)T1での第1出力データの収集が終了し、第2期間(運動期間)T2での第2出力データの収集により運動解析が開始される。
In step S <b> 5 of FIG. 8, it is monitored whether or not the
まず、三軸ジャイロセンサー104x〜104zの出力信号に基づく運動解析について説明する。図5の運動解析部204では、データ補正部206が、第2期間T2に三軸ジャイロセンサー104x〜104zから取得された出力信号から、その出力信号と時間軸上で対応するバイアス推定値Vias(t)を除去する。出力信号と時間軸上で対応するバイアス推定値Vias(t)とは、出力信号がサンプリングされた時刻tを式(1)に代入することで求められる。この際、時間を関数とするバイアス推定値は式(1)のように一次関数であると、角速度センサー出力から除算されるバイアス値をデータ補正部206にて容易にかつ高速に演算することができる。なお、センサーユニット20からホスト端末200に送出されるセンサーユニット信号は、サンプリング時刻と、そのサンプリング時刻にて取得された三軸ジャイロセンサー104x〜104zの出力信号とを一パケットに収納している。
First, motion analysis based on output signals from the three-
このとき、データ補正部206は、図6の第1期間T1に取得された位置P0についての既知のデータ(角速度は零)で初期化し、その初期値に基づいて図6の第2期間T2に収集されたデータを合わせて補正することができる。
At this time, the
図10(F)は、上記のようにして補正されたデータを示す。図10(F)に示すように、運動期間の前後でゴルフクラブ10が静止される期間では、角速度は零となり、バイアス値が除去されている。運動期間でも同様にバイアス値が除去されるので、誤差の少ない補正データとなる。
FIG. 10F shows data corrected as described above. As shown in FIG. 10F, in the period in which the
次に、図5の運動解析部204では、演算部208がデータ補正部206からの補正データに基づいてゴルフクラブ10の運動を解析する。演算部208は、補正データを積分することで、角速度データから角度を演算して、ゴルフクラブ10の姿勢を解析することができる。
Next, in the
一方、センサーユニット20からホスト端末200に送出されるセンサーユニット信号には、加速度センサー102x〜102zからの出力信号も含まれている。そこで、演算部208は、加速度センサー102x〜102zからの出力信号をm(mは自然数)階積分することで、ゴルフクラブ10の運動を解析することができる。加速度センサー102x〜102zからの出力信号が1階積分されると、加速度から速度を求めることができる。加速度センサー102x〜102zからの出力信号が2階積分されると、速度から位置を求めることができる。この際、図7に示す位置P0及びP3での既知のデータ(位置P0及びP3は既知であり、位置P0での速度及び加速度は零である)に基づいて、加速度センサー102x〜102zからの出力信号及びその積分値を補正することができる。
On the other hand, the sensor unit signal transmitted from the
こうして、図7に示す位置P0から開始されて、アドレス位置P1からフィニッシュ位置P5までのゴルフクラブ10のスイング運動を、バイアス値を除去して精度よく解析することができる。しかも、本実施形態では運動期間後の静止期間を待たずに、運動解析をリアルタイムで実施することができる。
In this way, the swing motion of the
このような運動解析は、例えばゴルフクラブ10を充電器30に戻すことで終了することができる。そこで図6では、ステップS7にてゴルフクラブ10が充電器30に戻されたか否かを判断し、ステップS7での判断がYESとなることで、運動解析を終了することができる。なお、ゴルフクラブ10が充電器30に戻されたことは、図3及び図4に示すゴルフクラブ10の接点13,14の電圧等を図3の制御部110が監視することで判明する。
Such a motion analysis can be ended by returning the
なお、上記のように本実施形態について詳細に説明したが、本発明の新規事項および効果から実体的に逸脱しない多くの変形が可能であることは当業者には容易に理解できるであろう。従って、このような変形例はすべて本発明の範囲に含まれるものとする。 Although the present embodiment has been described in detail as described above, it will be easily understood by those skilled in the art that many modifications can be made without departing from the novel matters and effects of the present invention. Accordingly, all such modifications are intended to be included in the scope of the present invention.
例えば、本発明の測定対象物体は、好適にはゴルフクラブ、テニスラケット等の運動器具に適用することができるが、これに限定されない。 For example, the measurement target object of the present invention can be preferably applied to an exercise apparatus such as a golf club or a tennis racket, but is not limited thereto.
また、バイアス推定部202、データ補正部206または告知部270は、ホスト端末200でなくセンサーユニット20に設けてもよい。
Further, the
1 運動解析装置、10 測定対象物体、20 センサーユニット、30 充電器(保持具)、102x〜102z 加速度センサー、104x〜104z 角速度センサー(ジャイロセンサー)、110 制御部、110A データ処理部、110B 充電制御部、120 通信部、130 二次電池、200 ホスト端末、202 バイアス推定部、204 運動解析部、206 データ補正部、208 演算部、270 告知部、T1 第1期間、T2 第2期間 DESCRIPTION OF SYMBOLS 1 Motion analysis apparatus, 10 measurement object, 20 sensor unit, 30 charger (holding tool), 102x-102z acceleration sensor, 104x-104z angular velocity sensor (gyro sensor), 110 control part, 110A data processing part, 110B charge control Unit, 120 communication unit, 130 secondary battery, 200 host terminal, 202 bias estimation unit, 204 motion analysis unit, 206 data correction unit, 208 calculation unit, 270 notification unit, T1 first period, T2 second period
Claims (10)
前記測定対象物体が静止状態である第1期間に前記角速度センサーから取得された出力信号に基づいて、前記角速度センサーの出力信号に含まれて時間とともに変化するバイアス値を、時間を関数とするバイアス推定値として求めるバイアス推定部と、
前記第1期間に続く第2期間に前記角速度センサーから取得された出力信号から、前記出力信号と前記時間軸上で対応する前記バイアス推定値が除去された補正データに基づいて、前記測定対象物体の運動を解析する運動解析部と、
を有することを特徴とする運動解析装置。 An angular velocity sensor for detecting the angular velocity of the object to be measured;
Based on the output signal acquired from the angular velocity sensor during the first period in which the measurement target object is stationary, a bias value that is included in the output signal of the angular velocity sensor and changes with time is used as a function of time. A bias estimation unit to be obtained as an estimated value;
Based on the correction data obtained by removing the output signal and the estimated bias corresponding to the time axis from the output signal acquired from the angular velocity sensor in the second period following the first period, the measurement target object A motion analysis unit for analyzing the motion of
A motion analysis apparatus comprising:
前記バイアス推定部は、前記角速度センサーからの出力信号として時間軸上でサンプリングされたデータを、前記時間軸を含む二次元面で直線近似して、前記バイアス推定値を求めることを特徴とする運動解析装置。 In claim 1,
The bias estimation unit obtains the bias estimation value by linearly approximating data sampled on the time axis as an output signal from the angular velocity sensor on a two-dimensional plane including the time axis. Analysis device.
一秒あたりの角速度(dps)であるバイアス推定値Vias(t)の直線近似式を、Vias(t)=a×t+bとしたとき、前記バイアス推定部は、傾きaがしきい値よりも小さくなった時に前記バイアス推定値を確定することを特徴とする運動解析装置。 In claim 2,
When the linear approximation formula of bias estimated value Vias (t), which is the angular velocity per second (dps), is Vias (t) = a × t + b, the bias estimating unit has a slope a smaller than a threshold value. A kinematic analysis device characterized in that the estimated bias value is determined when the time becomes.
前記バイアス推定部は、前記傾きaがa≦0.010となった時に前記バイアス推定値を確定することを特徴とする運動解析装置。 In claim 3,
The motion estimation apparatus, wherein the bias estimation unit determines the bias estimation value when the inclination a becomes a ≦ 0.010.
前記バイアス推定部は、前記傾きaがa≦0.005となった時に前記バイアス推定値を確定することを特徴とする運動解析装置。 In claim 3,
The motion estimation apparatus, wherein the bias estimation unit determines the bias estimation value when the slope a becomes a ≦ 0.005.
前記バイアス推定部にて前記バイアス推定値が確定された時以降に、運動開始を告知する告知部をさらに有することを特徴とする運動解析装置。 In any one of Claims 3 thru | or 5,
The motion analysis apparatus further comprising a notification unit for notifying the start of exercise after the bias estimation value is determined by the bias estimation unit.
前記運動解析部は、前記補正データ及び前記補正データの積分値に基づいて前記測定対象物体の運動を解析することを特徴とする運動解析装置。 In any one of Claims 1 thru | or 6,
The motion analysis unit analyzes the motion of the measurement target object based on the correction data and an integrated value of the correction data.
前記運動解析部は、前記角速度センサーの出力信号が入力される順にリアルタイムで前記測定対象物体の運動を解析することを特徴とする運動解析装置。 In claim 7,
The motion analysis device analyzes the motion of the measurement target object in real time in the order in which the output signals of the angular velocity sensor are input.
前記測定対象物体の加速度を検出する加速度センサーをさらに有し、
前記運動解析部は、前記加速度センサーの出力信号及び記加速度センサーの出力信号のm(mは自然数)階積分値に基づいて前記測定対象物体の運動を解析することを特徴とする運動解析装置。 In any one of Claims 1 thru | or 8,
An acceleration sensor for detecting an acceleration of the measurement object;
The motion analysis unit analyzes the motion of the measurement target object based on m (m is a natural number) floor integral value of the output signal of the acceleration sensor and the output signal of the acceleration sensor.
前記第1期間に取得された前記角速度センサーの出力信号に含まれて時間とともに変化するバイアス値を、時間を関数とするバイアス推定値として求める工程と、
前記第1期間に続く第2期間に前記角速度センサーの出力信号を取得する工程と、
前記第2期間に取得された前記角速度センサーの出力信号から、前記出力信号と前記時間軸上で対応する前記バイアス推定値が除去された補正データに基づいて、前記測定対象物体の運動を解析する工程と、
を有することを特徴とする運動解析方法。 Obtaining an output signal from an angular velocity sensor attached to the measurement target object in a first period in which the measurement target object is stationary;
Obtaining a bias value included in an output signal of the angular velocity sensor acquired in the first period and changing with time as a bias estimation value having a function of time;
Obtaining an output signal of the angular velocity sensor in a second period following the first period;
The motion of the measurement target object is analyzed based on correction data obtained by removing the bias estimation value corresponding to the output signal and the time axis from the output signal of the angular velocity sensor acquired in the second period. Process,
A motion analysis method characterized by comprising:
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012059817A JP6074897B2 (en) | 2012-03-16 | 2012-03-16 | Motion analysis apparatus and motion analysis method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012059817A JP6074897B2 (en) | 2012-03-16 | 2012-03-16 | Motion analysis apparatus and motion analysis method |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013192590A true JP2013192590A (en) | 2013-09-30 |
| JP2013192590A5 JP2013192590A5 (en) | 2015-04-30 |
| JP6074897B2 JP6074897B2 (en) | 2017-02-08 |
Family
ID=49392272
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012059817A Expired - Fee Related JP6074897B2 (en) | 2012-03-16 | 2012-03-16 | Motion analysis apparatus and motion analysis method |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6074897B2 (en) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016144733A (en) * | 2016-05-18 | 2016-08-12 | 株式会社Access | Swing analysis system using motion sensor, swing analysis method, and swing analysis program |
| JP2017119102A (en) * | 2015-12-28 | 2017-07-06 | 住友ゴム工業株式会社 | Kinematic analysis device, method and program |
| CN107408151A (en) * | 2015-03-27 | 2017-11-28 | 英特尔公司 | Use the motion tracking of electronic equipment |
| JP2019054845A (en) * | 2017-09-19 | 2019-04-11 | 住友ゴム工業株式会社 | Analysis apparatus of behavior of elastic body |
| JP2021105618A (en) * | 2018-03-08 | 2021-07-26 | セイコーエプソン株式会社 | Inertial measurement unit, moving body positioning device, system and moving body |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11295072A (en) * | 1998-04-14 | 1999-10-29 | Japan Aviation Electronics Ind Ltd | Compass |
| JP2001242192A (en) * | 2000-02-25 | 2001-09-07 | Japan Aviation Electronics Industry Ltd | Moving body motion measurement device |
| JP2007155583A (en) * | 2005-12-07 | 2007-06-21 | Tamagawa Seiki Co Ltd | Method and device for measuring hole passage |
| JP2009121957A (en) * | 2007-11-15 | 2009-06-04 | Hitachi Ltd | Navigation device and angular velocity detection signal correction value calculation method |
| JP2009192462A (en) * | 2008-02-18 | 2009-08-27 | Seiko Epson Corp | POSITIONING METHOD, PROGRAM, AND POSITIONING DEVICE |
| JP2011059020A (en) * | 2009-09-11 | 2011-03-24 | Chiba Inst Of Technology | Apparatus, method and program for estimating three-dimensional attitude |
| JP2011142927A (en) * | 2009-09-29 | 2011-07-28 | Univ Of Tsukuba | Bat selection system and sensor bat of the same |
| WO2011123149A1 (en) * | 2010-03-30 | 2011-10-06 | Apple Inc. | Calibrating sensor measurements on mobile devices |
-
2012
- 2012-03-16 JP JP2012059817A patent/JP6074897B2/en not_active Expired - Fee Related
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11295072A (en) * | 1998-04-14 | 1999-10-29 | Japan Aviation Electronics Ind Ltd | Compass |
| JP2001242192A (en) * | 2000-02-25 | 2001-09-07 | Japan Aviation Electronics Industry Ltd | Moving body motion measurement device |
| JP2007155583A (en) * | 2005-12-07 | 2007-06-21 | Tamagawa Seiki Co Ltd | Method and device for measuring hole passage |
| JP2009121957A (en) * | 2007-11-15 | 2009-06-04 | Hitachi Ltd | Navigation device and angular velocity detection signal correction value calculation method |
| JP2009192462A (en) * | 2008-02-18 | 2009-08-27 | Seiko Epson Corp | POSITIONING METHOD, PROGRAM, AND POSITIONING DEVICE |
| JP2011059020A (en) * | 2009-09-11 | 2011-03-24 | Chiba Inst Of Technology | Apparatus, method and program for estimating three-dimensional attitude |
| JP2011142927A (en) * | 2009-09-29 | 2011-07-28 | Univ Of Tsukuba | Bat selection system and sensor bat of the same |
| WO2011123149A1 (en) * | 2010-03-30 | 2011-10-06 | Apple Inc. | Calibrating sensor measurements on mobile devices |
| JP2013527915A (en) * | 2010-03-30 | 2013-07-04 | アップル インコーポレイテッド | Calibrating sensor readings on mobile devices |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107408151A (en) * | 2015-03-27 | 2017-11-28 | 英特尔公司 | Use the motion tracking of electronic equipment |
| EP3274791A4 (en) * | 2015-03-27 | 2018-10-31 | Intel Corporation | Motion tracking using electronic devices |
| US10799118B2 (en) | 2015-03-27 | 2020-10-13 | Intel Corporation | Motion tracking using electronic devices |
| JP2017119102A (en) * | 2015-12-28 | 2017-07-06 | 住友ゴム工業株式会社 | Kinematic analysis device, method and program |
| JP2016144733A (en) * | 2016-05-18 | 2016-08-12 | 株式会社Access | Swing analysis system using motion sensor, swing analysis method, and swing analysis program |
| JP2019054845A (en) * | 2017-09-19 | 2019-04-11 | 住友ゴム工業株式会社 | Analysis apparatus of behavior of elastic body |
| JP2021105618A (en) * | 2018-03-08 | 2021-07-26 | セイコーエプソン株式会社 | Inertial measurement unit, moving body positioning device, system and moving body |
| JP7092229B2 (en) | 2018-03-08 | 2022-06-28 | セイコーエプソン株式会社 | Inertial measurement unit, mobile positioning device, system, and mobile |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6074897B2 (en) | 2017-02-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5915148B2 (en) | Motion analysis method and motion analysis apparatus | |
| JP5948011B2 (en) | Motion analysis device | |
| JP5790914B2 (en) | Deformation amount calculation device and deformation amount calculation method | |
| JP5773144B2 (en) | Motion analysis apparatus, motion analysis system, motion analysis program, and recording medium | |
| US9604101B2 (en) | Golf swing analysis device and golf swing analysis method | |
| JP5761506B2 (en) | Swing analysis apparatus, swing analysis system, swing analysis method, swing analysis program, and recording medium | |
| JP5912415B2 (en) | Golf swing analysis apparatus and golf swing analysis method | |
| JP2013202066A (en) | Motion analysis device | |
| JP6168276B2 (en) | Analysis control device, motion analysis system, program, recording medium, and motion analysis method | |
| KR20140044754A (en) | Golf swing analyzing apparatus and method of analyzing golf swing | |
| JP6074897B2 (en) | Motion analysis apparatus and motion analysis method | |
| JP5773122B2 (en) | Swing analyzer and swing analysis program | |
| JP2015156882A (en) | Motion analysis apparatus and motion analysis system | |
| JP2013192591A (en) | Motion analysis information collecting apparatus, motion analysis device and motion analysis method | |
| JP2016067410A (en) | Motion analysis apparatus, motion analysis system, motion analysis method, and program | |
| JP2017029516A (en) | Golf swing analyzer | |
| EP3120901A1 (en) | Movement analysis method, movement analysis device, movement analysis system and program | |
| WO2014125790A1 (en) | Motion analysis system and azimuth tuning method | |
| US20170011652A1 (en) | Motion analysis method, motion analysis apparatus, motion analysis system, and program | |
| JP2015100567A (en) | Azimuth calibration method, motion analysis apparatus, and azimuth calibration program | |
| JP6300196B2 (en) | Exercise equipment behavior analysis apparatus, exercise equipment behavior analysis method, and exercise equipment behavior analysis program | |
| US20170004729A1 (en) | Motion analysis method, motion analysis apparatus, motion analysis system, and program | |
| JP6268897B2 (en) | Motion analysis method, motion analysis program, and motion analysis device | |
| JP7005987B2 (en) | Golf swing display system, information processing device and method | |
| JP2015134008A (en) | Motion analysis method, motion analysis device, and motion analysis program |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150313 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20150313 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160322 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160425 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160809 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161007 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20161213 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20161226 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6074897 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |