JP2013106981A - インナーガントリー - Google Patents
インナーガントリー Download PDFInfo
- Publication number
- JP2013106981A JP2013106981A JP2013045085A JP2013045085A JP2013106981A JP 2013106981 A JP2013106981 A JP 2013106981A JP 2013045085 A JP2013045085 A JP 2013045085A JP 2013045085 A JP2013045085 A JP 2013045085A JP 2013106981 A JP2013106981 A JP 2013106981A
- Authority
- JP
- Japan
- Prior art keywords
- gantry
- patient
- synchrocyclotron
- applicator
- accelerator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images











Landscapes
- Radiation-Therapy Devices (AREA)
Abstract
【解決手段】本システムは、患者サポートと、アウターガントリーであって、患者サポート上の患者の周囲の、ある範囲のポジションを通って加速器が移動することを可能とするよう、加速器が搭載されるアウターガントリーとを含む。加速器は、患者内のターゲットに達するのに十分なエネルギーレベルを有する陽子あるいはイオンビームを発生させるよう構成されている。インナーガントリーは、ターゲットに向かって陽子あるいはイオンビームを導くための開口部を具備してなる。
【選択図】図15
Description
[付記項1]
患者サポートと、
アウターガントリーであって、前記患者サポート上の患者の周囲の、ある範囲のポジションを通って加速器が移動することを可能とするよう、前記加速器が搭載されるアウターガントリーと、
前記ターゲットに向かって前記陽子あるいはイオンビームを導くための開口部を具備してなるインナーガントリーと、
を具備してなり、
前記加速器は、前記患者内のターゲットに達するのに十分なエネルギーレベルを有する陽子あるいはイオンビームを発生させるよう構成されていることを特徴とするシステム。
[付記項2]
前記インナーガントリーはアプリケータを具備してなり、前記アプリケータは前記開口部を保持し、前記アプリケータは前記インナーガントリーに沿って移動可能であることを特徴とする付記項1に記載のシステム。
[付記項3]
前記アプリケータは、前記患者に対して前記開口部を移動させるよう構成されていることを特徴とする付記項2に記載システム。
[付記項4]
前記アプリケータは、前記患者に向かって、あるいは前記患者から離れる方向に、前記開口部を移動させるよう構成されていることを特徴とする付記項3に記載システム。
[付記項5]
前記インナーガントリーはトラックを具備してなり、前記アプリケータは前記トラックに沿って移動するよう構成されていることを特徴とする付記項2に記載のシステム。
[付記項6]
前記トラックに対して移動可能なカバーをさらに具備してなり、前記カバーは、前記患者サポートの下方のボールト内に物体が落下するのを阻止するためのものであることを特徴とする付記項5に記載のシステム。
[付記項7]
前記アウターガントリーおよび前記インナーガントリーの動作を制御するようプログラムされた処理デバイスをさらに具備してなることを特徴とする付記項1に記載のシステム。
[付記項8]
前記処理デバイスは、前記陽子あるいはイオンビームを前記開口部と実質的に整列させるために、前記アウターガントリーおよび前記インナーガントリーの動作を制御するよう構成されていることを特徴とする付記項7に記載のシステム。
[付記項9]
前記開口部は、前記陽子あるいはイオンビームを実質的に平行にするよう構成されていることを特徴とする付記項1に記載のシステム。
[付記項10]
患者サポートをさらに具備してなり、前記患者サポートは前記インナーガントリーおよび前記アウターガントリーに対して移動可能であることを特徴とする付記項1に記載のシステム。
[付記項11]
患者サポートと、
粒子ビーム加速器が搭載されるガントリーであって、このガントリーは前記患者サポートの上方および下方のポジションへと移動可能であり、前記粒子ビーム加速器は前記患者サポートに向かって粒子ビームを向けるためのものであるガントリーと、
前記粒子ビーム加速器と前記患者サポートとの間に配置された開口部であって、前記粒子ビームを変化させるための開口部と、
を具備してなることを特徴とするシステム。
[付記項12]
前記開口部を保持するための装置をさらに具備してなり、前記装置は前記患者サポートに対して移動可能であることを特徴とする付記項11に記載のシステム。
[付記項13]
前記装置は、前記患者サポートに対して前記開口部を位置決めするようコンピューター制御されるロボットアームを具備してなることを特徴とする付記項12に記載のシステム。
[付記項14]
前記装置は前記開口部を保持するためのスタンドを具備してなり、前記スタンドは手動で位置決め可能であることを特徴とする付記項12に記載のシステム。
[付記項15]
前記粒子ビーム加速器はシンクロサイクロトロンであり、かつ、
前記システムはさらに、前記開口部を保持するためのアプリケータを含む第2のガントリーを具備してなり、前記第2のガントリーは、前記開口部を前記粒子ビームと実質的に整列させるよう制御されることを特徴とする付記項11に記載のシステム。
[付記項16]
患者サポートと、
前記患者サポートに対して回動可能な第1のガントリーと、
前記第1のガントリーに搭載された粒子加速器であって、前記患者サポートに向かって直接的に粒子ビームを提供するよう構成された粒子加速器と、
前記患者サポートに対して位置決めされる第2のガントリーであって、実質的にC字形である第2のガントリーと、
を具備してなることを特徴とするシステム。
[付記項17]
前記第2のガントリーは、トラックと、開口部と、アプリケータと、を具備してなり、前記アプリケータは、前記開口部が前記粒子ビームと実質的に整列するように前記トラックに沿って動くことができ、前記開口部は、前記粒子ビームが前記患者サポート上の患者に到達する前に前記粒子ビームを変化させるようになっていることを特徴とする付記項16に記載のシステム。
[付記項18]
前記第1のガントリーおよび前記第2のガントリーを制御するためのコンピューターをさらに具備してなることを特徴とする付記項16に記載のシステム。
[付記項19]
前記第1のガントリーは、前記粒子加速器が前記患者サポートの上方のポジションから前記患者サポートの下方のポジションに存在するように動くことができ、前記第2のガントリーは、前記粒子加速器が前記患者サポートの下方のポジションに存在するとき、前記粒子加速器を保護するためのカバーを具備してなることを特徴とする付記項16に記載のシステム。
[付記項20]
前記インナーガントリーは、前記粒子ビームのサイズおよび/または形状を変えるためのデバイスを具備してなり、前記デバイスは前記シンクロサイクロトロンに対して移動可能であることを特徴とする付記項16に記載のシステム。
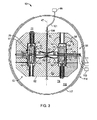
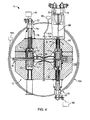
12 マグネットシステム
38 ビーム抽出システム
40 環状超伝導コイル
42 環状超伝導コイル
44 透過性ヨーク素材
46 透過性ヨーク素材
50 銅チャネル
53 ワイヤ
54 エポキシコンパウンド
55 ヒーターブランケット
56 環状ステンレススチールリバースボビン
58 与圧ステンレススチールブラダー
70 低温チャンバー
72 Gifford-McMahonクライオクーラー
74 Gifford-McMahonクライオクーラー
77 Gifford-McMahonクライオクーラー
78 クライオクーラーヘッド
79 Gifford-McMahonクライオクーラー
80 コンプレッサー
82 ピルボックス形状マグネットヨーク
84 リターン磁束
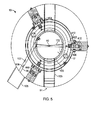
90 イオン源
91 高周波駆動システム
94 電気ケーブル
95 電流源
99 水素の供給源
100 ディープレート
101 ガスライン
102 ダミーディープレート
103 半円表面
105 半円表面
107 スペース
108 水冷ライン
109 ダクト
111 真空ポンプ
113 熱交換器
114 マグネットシールド
116 スペース
119 真空チャンバー
122 カウンターウエイト
124 カウンターウエイト
125 ビームフォーメーションシステム
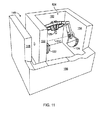
146 迷路
148 壁
150 壁
152 壁
154 壁
156 壁
158 壁
160 治療室
162 ベース
164 床スペース
170 患者サポート
190 カソード
192 カソード
194 チューブ
402 ウォームトゥコールドサポートストラップ
404 ウォームトゥコールドサポートストラップ
406 ウォームトゥコールドサポートストラップ
408 リンク
410 リンク
412 リンク
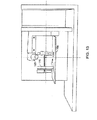
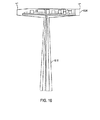
500 荷電粒子放射線治療システム
502 ビーム発生粒子加速器(シンクロサイクロトロン)
504 回転ガントリー
506 患者
508 脚部
510 脚部
512 ベアリング
514 ベアリング
516 トラス構造体
518 処置エリア
522 床
524 ボールト
530 壁
540 アイソセンタ
582 スパン
590 スパン
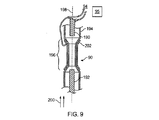
601 インナーガントリー
604 シンクロサイクロトロン
605 回転ガントリー
606 患者サポート
607 患者
610 アプリケータ
611 粒子ビーム
614 カバー
617 溶接構造体
618 高精度リニア支持レール
619 伸長ドライブ
620 シータドライブ
625 開口部
Claims (1)
- 患者サポートと、
アウターガントリーであって、前記患者サポート上の患者の周囲の、ある範囲のポジションを通って加速器が移動することを可能とするよう、前記加速器が搭載されるアウターガントリーと、
前記ターゲットに向かって前記陽子あるいはイオンビームを導くための開口部を具備してなるインナーガントリーと、
を具備してなり、
前記加速器は、前記患者内のターゲットに達するのに十分なエネルギーレベルを有する陽子あるいはイオンビームを発生させるよう構成されていることを特徴とするシステム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013045085A JP5662503B2 (ja) | 2013-03-07 | 2013-03-07 | インナーガントリー |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013045085A JP5662503B2 (ja) | 2013-03-07 | 2013-03-07 | インナーガントリー |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010535942A Division JP5221669B2 (ja) | 2007-11-30 | 2007-11-30 | インナーガントリー |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013106981A true JP2013106981A (ja) | 2013-06-06 |
| JP5662503B2 JP5662503B2 (ja) | 2015-01-28 |
Family
ID=48704339
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013045085A Expired - Fee Related JP5662503B2 (ja) | 2013-03-07 | 2013-03-07 | インナーガントリー |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5662503B2 (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8916843B2 (en) | 2005-11-18 | 2014-12-23 | Mevion Medical Systems, Inc. | Inner gantry |
| JP2017501799A (ja) * | 2013-12-20 | 2017-01-19 | メビオン・メディカル・システムズ・インコーポレーテッド | コリメータおよびエネルギーデグレーダ |
| US10646728B2 (en) | 2015-11-10 | 2020-05-12 | Mevion Medical Systems, Inc. | Adaptive aperture |
| US10653892B2 (en) | 2017-06-30 | 2020-05-19 | Mevion Medical Systems, Inc. | Configurable collimator controlled using linear motors |
| US10675487B2 (en) | 2013-12-20 | 2020-06-09 | Mevion Medical Systems, Inc. | Energy degrader enabling high-speed energy switching |
| US10925147B2 (en) | 2016-07-08 | 2021-02-16 | Mevion Medical Systems, Inc. | Treatment planning |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07503669A (ja) * | 1992-02-17 | 1995-04-20 | プロエム スフェン | 多軸制御可能なマニピュレータ用無衝突制御システム |
| JP2002263090A (ja) * | 2001-03-07 | 2002-09-17 | Mitsubishi Heavy Ind Ltd | 検査治療装置 |
| JP2003018132A (ja) * | 2001-07-04 | 2003-01-17 | Sony Corp | 受信装置 |
| JP2003215299A (ja) * | 2002-01-17 | 2003-07-30 | Mitsubishi Electric Corp | 荷電粒子照射装置 |
| WO2007061937A2 (en) * | 2005-11-18 | 2007-05-31 | Still River Systems Inc. | Charged particle radiation therapy |
-
2013
- 2013-03-07 JP JP2013045085A patent/JP5662503B2/ja not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07503669A (ja) * | 1992-02-17 | 1995-04-20 | プロエム スフェン | 多軸制御可能なマニピュレータ用無衝突制御システム |
| JP2002263090A (ja) * | 2001-03-07 | 2002-09-17 | Mitsubishi Heavy Ind Ltd | 検査治療装置 |
| JP2003018132A (ja) * | 2001-07-04 | 2003-01-17 | Sony Corp | 受信装置 |
| JP2003215299A (ja) * | 2002-01-17 | 2003-07-30 | Mitsubishi Electric Corp | 荷電粒子照射装置 |
| WO2007061937A2 (en) * | 2005-11-18 | 2007-05-31 | Still River Systems Inc. | Charged particle radiation therapy |
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10722735B2 (en) | 2005-11-18 | 2020-07-28 | Mevion Medical Systems, Inc. | Inner gantry |
| US10279199B2 (en) | 2005-11-18 | 2019-05-07 | Mevion Medical Systems, Inc. | Inner gantry |
| US8916843B2 (en) | 2005-11-18 | 2014-12-23 | Mevion Medical Systems, Inc. | Inner gantry |
| US9925395B2 (en) | 2005-11-18 | 2018-03-27 | Mevion Medical Systems, Inc. | Inner gantry |
| US9452301B2 (en) | 2005-11-18 | 2016-09-27 | Mevion Medical Systems, Inc. | Inner gantry |
| US10675487B2 (en) | 2013-12-20 | 2020-06-09 | Mevion Medical Systems, Inc. | Energy degrader enabling high-speed energy switching |
| US9962560B2 (en) | 2013-12-20 | 2018-05-08 | Mevion Medical Systems, Inc. | Collimator and energy degrader |
| JP2017501799A (ja) * | 2013-12-20 | 2017-01-19 | メビオン・メディカル・システムズ・インコーポレーテッド | コリメータおよびエネルギーデグレーダ |
| US10646728B2 (en) | 2015-11-10 | 2020-05-12 | Mevion Medical Systems, Inc. | Adaptive aperture |
| US10786689B2 (en) | 2015-11-10 | 2020-09-29 | Mevion Medical Systems, Inc. | Adaptive aperture |
| US11213697B2 (en) | 2015-11-10 | 2022-01-04 | Mevion Medical Systems, Inc. | Adaptive aperture |
| US11786754B2 (en) | 2015-11-10 | 2023-10-17 | Mevion Medical Systems, Inc. | Adaptive aperture |
| US10925147B2 (en) | 2016-07-08 | 2021-02-16 | Mevion Medical Systems, Inc. | Treatment planning |
| US10653892B2 (en) | 2017-06-30 | 2020-05-19 | Mevion Medical Systems, Inc. | Configurable collimator controlled using linear motors |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5662503B2 (ja) | 2015-01-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5221669B2 (ja) | インナーガントリー | |
| US10722735B2 (en) | Inner gantry | |
| JP5662503B2 (ja) | インナーガントリー | |
| JP5662502B2 (ja) | インナーガントリー |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130318 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130318 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140303 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140527 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20141110 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20141204 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5662503 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |