JP2013003743A - Vehicle warning device and vehicle warning method - Google Patents
Vehicle warning device and vehicle warning method Download PDFInfo
- Publication number
- JP2013003743A JP2013003743A JP2011132693A JP2011132693A JP2013003743A JP 2013003743 A JP2013003743 A JP 2013003743A JP 2011132693 A JP2011132693 A JP 2011132693A JP 2011132693 A JP2011132693 A JP 2011132693A JP 2013003743 A JP2013003743 A JP 2013003743A
- Authority
- JP
- Japan
- Prior art keywords
- warning
- vehicle
- area
- driving status
- drive status
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images















Abstract
Description
本発明は、車両警告装置および車両警告方法に関する。 The present invention relates to a vehicle warning device and a vehicle warning method.
特許文献1には、車両の移動する方向に障害物があるか否かを画像データにより検知し、警告する障害物警告装置が開示されている。
ところで、近年、車両の発車直後に施設や店舗に衝突してしまう事故が多発している。このような事故は、運転者が前進と後進とを間違えて車両を発車させたことに起因する場合が多いと考えられる。 By the way, in recent years, accidents that collide with facilities and stores immediately after the departure of vehicles have frequently occurred. It is considered that such an accident is often caused by the driver starting the vehicle by mistakenly moving forward and backward.
そこで、本発明は、車両を動かす方向の間違いをより確実に防止することができる車両警告装置の提供を目的とする。 Accordingly, an object of the present invention is to provide a vehicle warning device that can more reliably prevent an error in the direction of moving the vehicle.
上記課題を解決するために、本発明に係る車両警告装置は、車両の移動方向を示す駆動ステータスを検出する検出手段と、車両が停車する前の移動方向を示す駆動ステータスと、停車後に検出した駆動ステータスと、が一致する場合に所定の警告を出力する警告手段と、を備える、という構成を特徴とする。 In order to solve the above problems, a vehicle warning device according to the present invention detects a drive status indicating a moving direction of a vehicle, a driving status indicating a moving direction before the vehicle stops, and detects after the vehicle stops. It is characterized by comprising a warning means for outputting a predetermined warning when the drive status matches.
本発明に係る車両警告装置によれば、車両を動かす方向の間違いをより確実に防止することができる。 According to the vehicle warning device of the present invention, it is possible to more reliably prevent an error in the direction of moving the vehicle.
以下、本発明の一実施形態に係る車両警告装置100について説明する。
Hereinafter, a
図1は、第一実施形態に係る車両警告装置100の概略構成図である。同図に示すように、車両警告装置100は、演算処理部1と、ディスプレイ10と、記憶装置11と、音声入出力装置13と、入力装置16と、ROM装置20と、車速センサ21と、ジャイロセンサ22と、GPS受信装置23と、FM多重放送受信装置24と、ビーコン受信装置25と、を有している。
FIG. 1 is a schematic configuration diagram of a
なお、車両警告装置100は、例えば、経路探索、交通情報の表示、探索経路によるユーザの誘導といったナビゲーション機能を備えるナビゲーション装置によって実現される。
Note that the
演算処理部1は、車両警告装置100の様々な処理を行う中心的なユニットである。例えば、演算処理部1は、各種センサ21、22、GPS受信装置23、FM多重放送受信装置24などから出力される情報を用いて車両の現在地を検出する。また、演算処理部1は、検出された現在地を示す情報に基づいて、ディスプレイ10への表示に必要な地図データ12を記憶装置11あるいはROM装置20から読み出す。
The
また、演算処理部1は、読み出した地図データ12をグラフィックス展開し、そこに現在地を示すマークを重ねてディスプレイ10へ出力する。また、記憶装置11あるいはROM装置20に記憶されている地図データ12などを用いて、現在地あるいはユーザから指示された出発地と、目的地(または、経由地や立ち寄り地)と、を結ぶ最適な経路(推奨経路)を探索する。また、演算処理部1は、所定の情報をスピーカ15やディスプレイ10から出力し、ユーザを誘導する。
Further, the
また、演算処理部1は、後述するように、ログ情報生成処理および第一警告判定処理を実行する。
In addition, the
なお、車両警告装置100の演算処理部1は、各デバイス間をバス7で接続した構成である。演算処理部1は、数値演算および各デバイスを制御するなどの処理を実行するCPU(Central Processing Unit)2と、記憶装置11から読み出した地図データ12や演算データなどを格納するRAM(Random Access Memory)3と、プログラムやデータを格納するROM(Read Only Memory)4と、演算データなどを書き換え可能な不揮発性のフラッシュメモリ5と、各種ハードウェアを演算処理部1と接続するためのI/F(インターフェース)6と、を有している。
The
図2は、フラッシュメモリ5に記憶されているログ情報200を示したものである。ログ情報200は、各レコード201に、レコードの生成時刻202と駆動ステータス203とが対応付けられて格納されている。
FIG. 2 shows
ここで、駆動ステータスとは、パーキング(P)、ニュートラル(N)、ドライブ(D)、リバース(R)といった車両の駆動状態(停止状態を含む)を示すステータスのことである。 Here, the drive status is a status indicating a driving state (including a stop state) of the vehicle such as parking (P), neutral (N), drive (D), and reverse (R).
レコードの生成時刻202には、該当するレコード201が生成された時刻が格納される。また、駆動ステータス203には、後述するログ情報生成処理により、ドライブ(D)またはリバース(R)のいずれかが格納される。
The
なお、各レコード201は、車速センサ21から出力されるパルス信号を演算処理部1が受信したタイミングで生成される。また、生成されたレコード201が所定数(例えば、20個)に達すると、古いレコードから順に削除されるとともに、新たなレコード201が生成される。
Each
このように、車速センサから出力されるパルス信号が示す所定距離(例えば、20cm)を移動すると、その時刻が対応付けられた1つのレコード201が新たに生成されることになる。また、駆動ステータス203には、レコード201が生成されたタイミングで検出された駆動ステータス203が格納される。
As described above, when a predetermined distance (for example, 20 cm) indicated by the pulse signal output from the vehicle speed sensor is moved, one
図1に戻って説明する。ディスプレイ10は、演算処理部1などで生成されたグラフィックス情報を表示するユニットである。ディスプレイ10は、液晶ディスプレイ、有機ELディスプレイなどで構成される。
Returning to FIG. The
記憶装置11は、例えば、HDD(Hard Disk Drive)や不揮発性メモリなど、少なくとも読み書きが可能な記録媒体で構成される。また、例えば、HDDには地図データ12が記憶されている。
The
音声入出力装置13は、音声入力装置としてマイクロフォン14を備え、音声出力装置としてスピーカ15を備える。マイクロフォン14は、使用者などが発した声など、車両警告装置100の外部の音声を取得する。また、スピーカ15は、演算処理部1で生成されたメッセージを音声信号として出力する。
The voice input /
入力装置16は、使用者からの指示を使用者による操作を介して受け付ける装置である。入力装置16は、例えば、方向キー17、ダイヤルスイッチ18、タッチパネル19、その他のハードスイッチ(縮尺変更キーなど)で構成される。
The
ROM装置20は、CD−ROMやDVD−ROMなどのROMや、IC(Integrated Circuit)カードといった、少なくとも読み取りが可能な記憶媒体で構成されている。このような記憶媒体には、例えば、動画データや、音声データなどが記憶されている。
The
車速センサ21、ジャイロセンサ22、GPS受信装置23は、車両警告装置100で車両の現在地を検出するために使用されるものである。
The
車速センサ21は、検出した車輪の回転数をパルス信号に変換し、所定の時間内に検出したパルス信号数から車両の車速を算出する。
The
ジャイロセンサ22は、光ファイバジャイロや振動ジャイロ等で構成され、車両の回転による角速度を検出する。
The
GPS受信装置23は、GPS衛星からの信号を受信して、車両とGPS衛星間の距離と、距離の変化率を3個以上の衛星に対して測定することで、車両の現在地、進行速度および進行方位を算出する。
The
FM多重放送受信装置24は、FM放送局から送られてくるFM多重放送信号を受信する。なお、FM多重放送には、VICS(Vehicle Information Communication System:登録商標)情報の概略現況交通情報、規制情報、SA/PA(サービスエリア/パーキングエリア)情報、駐車場情報、天気情報などや、FM多重一般情報としてラジオ局が提供する文字情報などがある。
The FM
ビーコン受信装置25は、光ビーコン、電波ビーコン等の信号を受信する。なお、ビーコン等の信号には、VICS情報の概略現況交通情報、規制情報、SA/PA(サービスエリア/パーキングエリア)情報、駐車場情報などがある。
The
図3は、車両内部の構成を示した図である。同図に示すように、車両警告装置100は、車両の内部ネットワークであるCAN(Controller Area Network)370を介して車両制御部300に接続される。また、車両制御部300は、CAN370を介してECU350(エンジンコントロールユニット)および駆動ステータス統合部360に接続され、相互にデータ伝送が可能となっている。
FIG. 3 is a diagram showing a configuration inside the vehicle. As shown in the figure, the
車両制御部300は、車両全体の制御に関する処理を行う。例えば、車両制御部300は、ECU350や駆動ステータス統合部360との間で所定の情報をやり取りし、車両の様々な制御を実行する。
The
また、車両制御部300は、ユーザがアクセルペダルを踏み込んだことを示す情報をECU350から取得する。
In addition,
また、車両制御部300は、駆動ステータスに関する情報を駆動ステータス統合部360から取得し、所定のログ情報を生成する。具体的には、車両制御部300は、図4に示すログ情報320を生成する。
In addition, the
ログ情報320には、各レコード321に、レコードの生成時刻322と、駆動ステータス323と、駆動ステータス323が検出されていた時間長さ324と、が対応付けられて格納されている。ここで、生成時刻322には、レコード321が生成された時刻が格納される。また、駆動ステータス323には、パーキング(P)、ニュートラル(N)、ドライブ(D)、リバース(R)のいずれかが格納される。また、検出時間長さ324には、かかる駆動ステータス323が検出されていた時間の長さが格納される。このようなログ情報320は、車両制御部が有するフラッシュメモリ(図示せず)などに記憶される。
In the log information 320, the
なお、ログ情報320は、駆動ステータス統合部360から所定のタイミング(例えば、駆動ステータス統合部360が新たな駆動ステータスを検出したタイミングなど)で出力される駆動ステータスに関する情報を車両制御部300が取得した場合に生成される。
Note that the log information 320 is acquired by the
また、ログ情報320は、生成されたレコード321が所定数(例えば、100個)に達すると、古いレコードから順に削除されるとともに、新たなレコード321が生成される。
In addition, when the number of generated
ECU350は、エンジン351の動作に関する制御を行う。例えば、ECU350は、エンジン351の始動指示を受け付けると、セルモータの回転によりエンジン351を始動させる。また、ECU350は、アクセルペダル352の踏み込み量に応じてエンジン351の回転数を制御する。
The
駆動ステータス統合部360は、駆動ステータスを検出し、これを車両制御部300に出力する。具体的には、駆動ステータス統合部360は、検出した駆動ステータスと、駆動ステータスが検出されていた時間の長さと、を含む所定の情報を車両制御部300に出力する。なお、駆動ステータス統合部360は、新たな駆動ステータスの検出時に所定の情報を車両制御部300に出力する。
The drive
次に、第一実施形態に係る車両警告装置100の機能ブロックについて説明する。なお、車両警告装置100の各機能ブロックは、演算処理部1に実装されるCPU2が読み込んだ所定のプログラムを実行することにより構築される。そのため、ROM4には、各機能部の処理を実行するためのプログラムが記憶されている。
Next, functional blocks of the
また、車両警告装置100の各機能ブロックは、第一実施形態において実現される車両警告装置100の各機能を理解容易にするために、主な処理内容に応じて分類したものである。また、各機能の分類の仕方やその名称によって、本発明が制限されることはない。なお、車両警告装置100の各構成は、処理内容に応じて、さらに多くの構成要素に分類することもできる。また、一つの構成要素がさらに多くの処理を実行するように分類することもできる。
Each functional block of the
また、車両警告装置100の機能部は、ハードウェア(ASICなど)により構築されてもよい。また、各機能部の処理が一つのハードウェアで実行されてもよいし、複数のハードウェアで実行されてもよい。
Further, the functional unit of the
図5は、車両警告装置100の機能ブロックを示した図である。車両警告装置100は、情報制御部401と、ログ情報生成部402と、警告判定部403と、を有している。そして、車両警告装置100は、これらの各機能部や他のセンサなどの協働により所定の処理を実行する。
FIG. 5 is a diagram illustrating functional blocks of the
情報制御部401は、様々な処理を行う中心的な機能部であり、処理内容に応じて、他の処理部を制御する。また、情報制御部401は、音声入出力装置13、入力装置16、各種センサ21、22から所定の情報や指示を受け付ける機能部である。また、情報制御部401は、取得した情報や受け付けた指示を、その種類や内容に応じて、所定の機能部に出力する機能部である。
The
また、情報制御部401は、各種センサ21、22、GPS受信装置23から出力される情報を用いて、マップマッチング処理を行い、現在地と車両の正面が向いている方向である車両方位を特定する。また、情報制御部401は、走行した日付、時刻、位置、を対応付けて走行履歴を記憶装置11に記憶する。また、情報制御部401は、現在地またはユーザから指示された出発地と、目的地とを結ぶ推奨経路を探索し、かかる経路や交通情報をグラフィックス変換してディスプレイ10に出力する。
In addition, the
また、情報制御部401は、所定のタイミング(例えば、1秒ごと)で車両制御部300が生成したログ情報320を取得する。また、情報制御部401は、取得したログ情報320の最新レコード321が示す駆動ステータス323がパーキング(P)である場合、警告判定処理の開始を指示する信号を警告判定部403に出力する。
Further, the
ログ情報生成部402は、ログ情報200を生成する機能部である。具体的には、ログ情報生成部402は、生成時刻202と、駆動ステータス203と、が対応付けられている所定数(例えば、20個)のレコード201からなるログ情報200を生成する。
The log
警告判定部403は、警告判定処理を実行する機能部である。具体的には、警告判定部403は、ログ情報200に記録されている最新の駆動ステータス203と、警告判定処理を開始した後に検出された駆動ステータス323と、に基づいて警告を出力するか否かを判定する。
The
また、警告判定部403は、アクセルペダル352が踏み込まれたか否かに応じて、所定の処理を実行する。
Further, the
[動作の説明]次に、第一実施形態に係る車両警告装置100のログ情報生成処理について具体的に説明する。図6は、ログ情報生成処理を示したフロー図である。また、図8は、かかる処理の具体例を示した図である。
[Description of Operation] Next, the log information generation processing of the
なお、ログ情報生成処理は、車両警告装置100の起動により開始される。
The log information generation process is started when the
ログ情報生成部402は、駆動ステータスを取得する(ステップS001)。具体的には、ログ情報生成部402は、車速センサ21から出力されるパルス信号を受信すると、その時点における最新の駆動ステータスを車両制御部300から取得する。
The log
また、駆動ステータスを取得したログ情報生成部402は、パルス信号を受信した時刻202と、取得した駆動ステータス203とを対応付けたレコード201を有するログ情報200を生成し、フラッシュメモリ5に出力する(ステップS002)。なお、時刻の特定は、例えば内蔵するタイマー(図示せず)によって特定されればよい。
In addition, the log
このように、ログ情報生成部402は、ステップS001およびステップS002の処理を繰り返し実行し、所定数(例えば、20個)のレコード201を有するログ情報200を生成し続ける。
As described above, the log
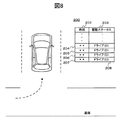
ここで、図8に示す具体例は、所定の駐車エリアに向かって車両が前進して進入し、停車している車両を示している。この場合、ログ情報200のレコード204〜レコード207は、車両が所定距離(例えば、20cm)進むごとに生成され、かかるタイミングで検出された駆動ステータス203が記録されている。具体的には、車両は駐車エリアに停車するまで前進していることから、レコード204〜レコード207の駆動ステータス203にはドライブ(D)が記録されることになる。
Here, the specific example shown in FIG. 8 shows a vehicle that has moved forward toward a predetermined parking area and has stopped. In this case, the
なお、停車時には車軸が回転しないため、車速センサ21からパルス信号は出力されない。そのため、ログ情報200が有する最新のレコード207には、停車直前の駆動ステータス(図8では、ドライブ(D)208)が記録される。
Since the axle does not rotate when the vehicle is stopped, no pulse signal is output from the
次に、警告判定処理について説明する。図7は、警告判定処理を示したフロー図である。また、図8は、かかる処理の具体例を示した図である。なお、警告判定処理は、駆動ステータス203がパーキング(P)であることを示す情報を取得した情報制御部401からの指示に基づき、警告判定部403によって開始される。すなわち、警告判定処理は、車両の停止状態が検出されると開始される。
Next, the warning determination process will be described. FIG. 7 is a flowchart showing the warning determination process. FIG. 8 is a diagram showing a specific example of such processing. The warning determination process is started by the
警告判定部403は、フラッシュメモリ5に格納されているログ情報200を取得する(ステップS011)。また、警告判定部403は、ログ情報200の最新レコード201に記憶されている駆動ステータス203を抽出する(ステップS012)。すなわち、警告判定部403は、停車直前における車両の駆動ステータス203(図8では、最新レコード207のドライブ(D)208)を抽出する。
The
ログ情報200から最新の駆動ステータス203を抽出すると、警告判定部403は、新たな駆動ステータスを検出したか否かを判定する(ステップS013)。具体的には、警告判定部403は、所定のタイミング(例えば、0.5秒〜1.0秒の間で所定の間隔)で車両制御部300により生成されたログ情報320を取得する。
When the
また、警告判定部403は、ログ情報320の中から、パーキング(P)が格納されているレコード321よりも新しいレコードであって、検出時間長さ324が所定時間以上(例えば、0.5秒以上)のレコードを特定する。そして、警告判定部403は、所定時間以上の検出時間長さが格納されたレコード321の駆動ステータス323がドライブ(D)またはリバース(R)のいずれかであるか否かを判定する。
Further, the
特定したレコードの駆動ステータス323がドライブ(D)またはリバース(R)のいずれかである場合、警告判定部403は、新たな駆動ステータスを検出したと判定し(ステップS013でYes)、処理をステップS014に移行する。
If the
一方で、所定時間以上の検出時間長さが格納されているレコード321がない場合、または、所定時間以上の検出時間長さが格納されたレコード321でも、駆動ステータス323がニュートラル(N)である場合、警告判定部403は、新たな駆動ステータスを検出していないと判定する(ステップS013でNo)。この場合、警告判定部403は、ステップS013の処理を繰り返し実行する。
On the other hand, when there is no
新たな駆動ステータスを検出すると、警告判定部403は、ステップS012で抽出した駆動ステータス203と、ステップS013で検出した駆動ステータス323と、が一致するか否かを判定する(ステップS014)。言い換えれば、警告判定部403は、停車直前の車両の移動方向(前進または後進)と、発車時の移動方向(前進または後進)と、が一致するか否かを判定する。
When a new drive status is detected, the
図8の具体例では、ログ情報200の最新レコード207に記録されている駆動ステータス208がドライブ(D)であるため、新たに検出された駆動ステータス323がドライブ(D)と一致するか否かが判定される。
In the specific example of FIG. 8, since the
判定の結果、両者が一致する場合(ステップS014でYes)、警告判定部403は、所定の警告を示す情報を生成し、これをディスプレイ10やスピーカ15に出力する(ステップS015)。なお、所定の警告を示す情報は、ディスプレイ10に「WARNING」という文字を表示するための情報や、「衝突します、注意してください」という音声をスピーカ15から出力するための情報である。
As a result of the determination, if the two match (Yes in step S014), the
一方で、ステップS012で抽出した駆動ステータス203と、ステップS013で検出された駆動ステータス323と、が一致しない場合(ステップS014でNo)、警告判定部403は、アクセルペダル352が踏み込まれたか否かを判定する(ステップS016)。
On the other hand, if the
そして、アクセルペダル352が踏み込まれたこと示す情報を車両制御部300から取得すると(ステップS016でYes)、警告判定部403は、警告判定処理を終了する。一方で、アクセルペダル352が踏み込まれたことを示す情報を取得しない場合(ステップS016でNo)、警告判定部403はステップS013の処理に戻る。
And if the information which shows that the
以上、本発明の第一実施形態について説明した。 The first embodiment of the present invention has been described above.
このように、第一実施形態に係る車両警告装置では、車両の停車前の移動方向(前進または後進)と同じ方向に車両を発車させようとした場合に所定の警告が出力される。多くの場合、停車直前に特定される移動方向と同じ方向にはフェンスや壁といった障害物が存在し、その方向に発車すると衝突してしまう危険性が高い。 Thus, in the vehicle warning device according to the first embodiment, a predetermined warning is output when the vehicle is about to start in the same direction as the moving direction (forward or reverse) before the vehicle stops. In many cases, there are obstacles such as fences and walls in the same direction as the moving direction specified immediately before stopping, and there is a high risk of collision if the vehicle departs in that direction.
したがって、車両の停車前の移動方向と同じ方向に車両を発車させようとしたことを検出した場合に所定の警告を出力すれば、車両を動かす方向の間違いをより確実に防止することができる。特に、地図データから車両周辺にある障害物などを特定できない場合でも、移動方向の誤りによる衝突事故を回避することができる。 Therefore, if a predetermined warning is output when it is detected that the vehicle is about to start in the same direction as the moving direction before the vehicle stops, an error in the direction of moving the vehicle can be prevented more reliably. In particular, even when an obstacle around the vehicle cannot be identified from the map data, a collision accident due to an error in the moving direction can be avoided.
次に、本発明の第二実施形態に係る発明について説明する。ここで、本実施形態に係る車両警告装置100は、第一実施形態に係る車両警告装置100の構成とほぼ同様の構成を有している。したがって、車両警告装置100として共通する構成については説明を省略する。
Next, the invention according to the second embodiment of the present invention will be described. Here, the
ここで、図9は、第二実施形態で用いられるログ情報220を示した図である。同図に示すように、各レコード221には、レコードの生成時刻222と、駆動ステータス223と、警告対象が存在するエリア224と、が対応付けられて格納されている。また、各レコード221は、第一実施形態のログ情報200と同様に、生成されたレコード221が所定数(例えば、20個)に達すると、古いレコードから順に削除されるとともに、新たなレコード221が生成される。
Here, FIG. 9 is a diagram showing the
ここで、警告対象が存在するエリア224には、車両の「前方エリア」または「後方エリア」のいずれかを示す情報が記録される。なお、警告対象が存在しない場合、何も記録されない。
Here, in the
また、地図データ12は、建物などの情報を3次元的に表現した、いわゆるポリゴンデータを有している。また、海や川など車両が立ち入ることのできない領域に関する情報は、進入禁止を示す情報と共に地図データ12に記憶されている。
The
なお、以下では、車両の前方エリアまたは後方エリアに存在するポリゴンデータや進入禁止を示す情報を有する地図データ12上の地点を「警告対象」と呼ぶ。
Hereinafter, a point on the
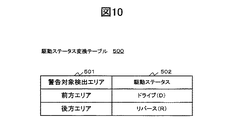
また、記憶装置11には、図10に示す駆動ステータス変換テーブル500が記憶されている。駆動ステータス変換テーブル500には、警告対象を検出したエリア(車両の前方エリアまたは後方エリア)501と、駆動ステータス502と、が対応付けられている。
Further, the
また、図11に示すように、第二実施形態に係る車両警告装置100の機能ブロックは、情報制御部601と、ログ情報生成部602と、警告対象検出部603と、警告判定部604と、を有している。なお、情報制御部601およびログ情報生成部602は、第一実施形態と同様であるため、説明を省略する。
As shown in FIG. 11, the functional blocks of the
警告対象検出部603は、警告対象検出処理を実行する機能部である。具体的には、警告対象検出部603は、車両方位に基づいて車両の前方エリアおよび後方エリアを決定し、かかるエリア内に存在する警告対象の検出を実行する。
The warning
警告判定部604は、警告判定処理を実行する機能部である。具体的には、警告判定部604は、ログ情報220の駆動ステータス223と、警告判定処理を開始した後に検出された駆動ステータス323と、に基づいて警告を出力するか否かを判定する。
The
また、警告判定部604は、アクセルペダル352が踏み込まれたか否かに応じて所定の処理を実行する。
Further, the
[動作の説明]次に、第二実施形態に係る車両警告装置100の警告対象検出処理について具体的に説明する。なお、ログ情報生成処理は、第一実施形態と同様であるため、説明を省略する。
[Description of Operation] Next, the warning object detection process of the
図12は、警告対象検出処理を示したフロー図である。また、図14、15は、かかる処理の具体例を示した図である。なお、警告対象検出処理は、車両警告装置100の起動により開始される。
FIG. 12 is a flowchart showing the warning target detection process. 14 and 15 are diagrams showing specific examples of such processing. Note that the warning target detection process is started when the
警告対象検出部603は、車両の前方エリアおよび後方エリアを決定する(ステップS021)。具体的には、図14、15に示すように、警告対象検出部603は、情報制御部601から取得した車両方位を示す情報に基づいて、車両の正面である前方(図14では前方701、図15では前方801)と、その逆側である後方(図14では前方702、図15では前方802)と、を特定する。
The warning
また、警告対象検出部603は、特定した車両前方および後方に基づいて前方エリアおよび後方エリアを特定する。具体的には、図14、15に示すように、車両前方の所定範囲内(例えば、車両前端から3m四方の範囲)を前方エリア(図14では前方703、図15では前方803)に決定する。また、警告対象検出部603は、特定した車両後方の所定距離内(例えば、車両の後端から3m四方の範囲)を後方エリア(図14では前方704、図15では前方804)に決定する。
Further, the warning
警告対象検出部603は、車両の前方エリアおよび後方エリアを決定すると、かかるエリアのどちらかに警告対象が存在するか検出を実行する(ステップS022)。具体的には、警告対象検出部603は、車両の前方エリアまたは後方エリアを示す地点座標に、ポリゴンデータや進入禁止領域といった警告対象が有する地点座標が含まれるか否かを判定する。
When the warning
そして、車両の前方エリアまたは後方エリアを示す地点座標に、警告対象の地点座標が含まれる場合(ステップS022でYes)、警告対象検出部603は、警告対象が存在するエリア(車両の前方エリアまたは後方エリア)を特定する。
If the point coordinates indicating the front area or the rear area of the vehicle include the point coordinates of the warning target (Yes in step S022), the warning
図14の具体例では、警告対象(コンビニなどの建物など)705が車両の後方エリア704に存在することが特定される。また、図15の具体例では、警告対象(海などの進入禁止領域)805が車両の前方エリア803に存在することが特定される。
In the specific example of FIG. 14, it is specified that a warning target (a building such as a convenience store) 705 exists in the
車両の前方エリアまたは後方エリアのどちらかに警告対象が存在することを検出した警告対象検出部603は、警告対象の検出時に生成されているログ情報220が有する最新レコード221の警告対象が存在するエリア224に、「前方エリア」または「後方エリア」を記録する。
The warning
例えば、図14の具体例では、車両はコンビニなどの建物705を後方にしてバック(後進)しているため、ログ情報220が有するレコード225〜レコード228の駆動ステータス223にはリバース(R)が記録されている。また、コンビニなどの施設705が後方エリア704内に含まれる位置まで車両が後進すると、かかる施設705は警告対象として検出され、検出時点で生成されているレコード227、228の警告対象が存在するエリア224には「後方エリア」が記録される。
For example, in the specific example of FIG. 14, the vehicle is backing (backward) with the
また、図15の具体例では、車両は海805を前方にして前進しているため、ログ情報220が有するレコード230〜レコード233の駆動ステータス223にはドライブ(D)が記録される。また、海805が前方エリア803内に含まれる位置まで車両が前進すると、海805などの進入禁止領域は警告対象として検出され、検出時点で生成されているレコード231〜レコード233の警告対象が存在するエリア224には「前方エリア」が記録される。
In the specific example of FIG. 15, since the vehicle is moving forward with the
一方で、前方エリアまたは後方エリアの地点座標に警告対象の地点座標が含まれない場合(ステップS022でNo)、警告対象検出部603は、ステップS021に処理を戻す。なお、この場合、レコード221の警告対象が存在するエリア224には何も記録されない。
On the other hand, when the point coordinates of the warning target are not included in the point coordinates of the front area or the rear area (No in step S022), the warning
次に、図13を用いて警告判定処理について説明する。警告判定処理は、駆動ステータス323がパーキング(P)であることを示す情報を取得した情報制御部601からの指示に基づき、警告判定部604によって開始される。すなわち、警告判定処理は、車両の停止状態が検出されると開始される。
Next, the warning determination process will be described with reference to FIG. The warning determination process is started by the
まず、警告判定部604は、フラッシュメモリ5に記憶されているログ情報220を取得する(ステップS031)。
First, the
ログ情報220を取得した警告判定部604は、車両の前方エリアまたは後方エリアに警告対象が存在するか否かを判定する(ステップS032)。具体的には、警告判定部604は、取得したログ情報220の最新レコード221を参照し、警告対象が存在するエリア224に「前方エリア」または「後方エリア」が記録されているか否かを判定する。そして、「前方エリア」または「後方エリア」のいずれかが記録されている場合(ステップS032でYes)、警告判定部604は、かかるエリアを抽出し、処理をステップS033に移行する。
The
一方で、警告対象が存在するエリア224に何も記録されていない場合(ステップS032でNo)、すなわち、車両の前方エリアおよび後方エリアのどちら側にも警告対象が存在しない場合、警告判定部604は、警告判定処理を終了する。
On the other hand, when nothing is recorded in the
車両の前方エリアまたは後方エリアのいずれかに警告対象が存在すると判定した警告判定部604は、前方エリア(または後方エリア)を駆動ステータスに変換する。
The
具体的には、警告判定部604は、駆動ステータス変換テーブル500を参照して、ステップS032で抽出したエリア501(前方エリアまたは後方エリア)に対応付けられている駆動ステータス502を取得する。すなわち、抽出したエリアが「前方エリア」である場合、警告判定部604は、ドライブ(D)を取得する。一方で、抽出したエリアが「後方エリア」である場合、警告判定部604は、リバース(R)を取得する。
Specifically, the
図14の具体例では、ログ情報220が有する最新レコード228の警告対象が存在するエリア224には、「後方エリア」が記録されている。この場合、警告判定部604は、駆動ステータス変換テーブル500を用いて、「後方エリア」に対応付けられている「リバース(R)」を取得する。
In the specific example of FIG. 14, “rear area” is recorded in the
また、図15の具体例では、ログ情報220が有する最新レコード233の警告対象が存在するエリア224には、「前方エリア」が記録されている。この場合、警告判定部604は、駆動ステータス変換テーブル500を用いて、「前方エリア」に対応付けられている「ドライブ(D)」を取得する。
Further, in the specific example of FIG. 15, “front area” is recorded in the
駆動ステータス変換テーブル500を用いて所定の駆動ステータス502を取得した警告判定部604は、新たな駆動ステータスを検出したか否かを判定する(ステップS034)。具体的には、警告判定部604は、所定のタイミング(例えば、0.5秒〜1.0秒の間で所定の間隔)で車両制御部300により生成されたログ情報320を取得する。
The
また、警告判定部604は、ログ情報320の中で、パーキング(P)が格納されているレコードよりも新しいレコード321であって、検出時間長さ324が所定時間以上(例えば、0.5秒以上)のレコードを特定する。そして、警告判定部604は、所定時間以上の検出時間長さが格納されたレコード321の駆動ステータス323がドライブ(D)またはリバース(R)のいずれかであるか否かを判定する。
Further, the
特定したレコード321の駆動ステータス323がドライブ(D)またはリバース(R)のいずれかである場合、警告判定部604は、新たな駆動ステータスを検出したと判定し(ステップS034でYes)、処理をステップS035に移行する。
If the
一方で、所定時間以上の検出時間長さが格納されているレコードがない場合、または、所定時間以上の検出時間長さが格納されたレコード321でも、駆動ステータス323がニュートラル(N)である場合、警告判定部604は、新たな駆動ステータスを検出していないと判定する(ステップS034でNo)。この場合、警告判定部604は、ステップS034の処理を繰り返し実行する。
On the other hand, when there is no record in which the detection time length equal to or longer than the predetermined time is stored, or the
新たな駆動ステータスを検出すると、警告判定部604は、ステップS033で取得した駆動ステータス502と、ステップS034で検出した駆動ステータス323と、が一致するか否かを判定する(ステップS035)。言い換えれば、警告判定部604は、停車直前の車両の移動方向(前進または後進)と、発車時の移動方向(前進または後進)と、が一致するか否かを判定する。
When a new drive status is detected, the
図14の具体例では、ステップS033で取得した駆動ステータス223がリバース(R)であるため、警告判定部604は、新たに検出した駆動ステータス323がリバース(R)と一致するか否かを判定する。
In the specific example of FIG. 14, since the
また、図15の具体例では、ステップS033で取得した駆動ステータス223がドライブ(D)であるため、警告判定部604は、新たに検出した駆動ステータス323がドライブ(D)と一致するか否かを判定する。
In the specific example of FIG. 15, since the
判定の結果、両者が一致する場合(ステップS035でYes)、警告判定部604は、所定の警告を示す情報を生成し、これをディスプレイ10やスピーカ15に出力する(ステップS036)。なお、所定の警告を示す情報とは、第一実施形態と同様であるため、説明を省略する。
As a result of the determination, if both match (Yes in step S035), the
一方で、ステップS033で取得した駆動ステータス223と、ステップS034で検出した駆動ステータス323と、が一致しない場合(ステップS035でNo)、警告判定部604は、処理をステップS037に移行する。なお、ステップS037の処理は第一実施形態のステップS016と同様であるため、説明を省略する。
On the other hand, if the
以上のような第二実施形態に係る発明によれば、車両を動かす方向の間違いをより確実に防止することができる。特に、本実施形態に係る発明では、ポリゴンデータを用いることにより、車両の前方エリアまたは後方エリア内にある警告対象を具体的に特定することができる。したがって、より高い精度で衝突回避の警告を出力することができる。 According to the invention according to the second embodiment as described above, an error in the direction of moving the vehicle can be prevented more reliably. In particular, in the invention according to the present embodiment, by using polygon data, it is possible to specifically specify a warning target in the front area or the rear area of the vehicle. Accordingly, a collision avoidance warning can be output with higher accuracy.
次に、本発明の第三実施形態に係る発明について説明する。ここで、本実施形態に係る車両警告装置100は、第二実施形態に係る車両警告装置100の構成とほぼ同様の構成を有している。したがって、車両警告装置100として共通する構成については説明を省略する。
Next, the invention according to the third embodiment of the present invention will be described. Here, the
第三実施形態に係る記憶装置11には、3次元ポリゴンデータによって描かれた駐車場データを有している。
The
また、図11に示すように、第三実施形態に係る車両警告装置100の機能ブロックは、第二実施形態の機能ブロックと同様に、情報制御部601と、ログ情報生成部602と、警告対象検出部603と、警告判定部604と、を有している。なお、情報制御部601と、ログ情報生成部602と、警告判定部604とは、第二実施形態と同様であるため、説明を省略する。
Further, as shown in FIG. 11, the functional blocks of the
警告対象検出部603は、警告対象検出処理を実行する機能部である。具体的には、警告対象検出部603は、車両方位に基づいて、車両の前方エリアおよび後方エリアを決定し、かかるエリア内に存在する警告対象の検出を実行する。また、警告対象検出部603は、前方エリアおよび後方エリアの両方に警告対象が存在することを検出した場合、警告対象により近いのが前方エリアであるのか、または、後方エリアであるのかを特定する。
The warning
[動作の説明]次に、第三実施形態に係る車両警告装置100で実行される所定の処理について説明する。車両警告装置100は、ログ情報生成処理と、警告対象検出処理と、警告判定処理と、を実行する。なお、ログ情報生成処理は、第一実施形態の場合と同様であるため、説明を省略する。また、警告判定処理は、第二実施形態の場合と同様のであるため、説明を省略する。
[Description of Operation] Next, a predetermined process executed by the
警告対象検出処理について具体的に説明する。図16は、警告対象検出処理を示したフロー図である。また、図17は、かかる処理の具体例を示した図である。なお、警告対象検出処理は、車両警告装置100の起動により開始される。
The warning target detection process will be specifically described. FIG. 16 is a flowchart showing the warning target detection process. FIG. 17 is a diagram showing a specific example of such processing. Note that the warning target detection process is started when the
警告対象検出部603は、車両の前方エリアおよび後方エリアを決定する(ステップS041)。具体的には、図17に示すように、警告対象検出部603は、情報制御部601から取得した車両方位を示す情報に基づいて、車両の正面である前方901と、その逆側である後方902と、を特定する。
The warning
また、警告対象検出部603は、特定した車両前方および後方に基づいて前方エリアおよび後方エリアを特定する。具体的には、図17に示すように、警告対象検出部603は、車両前方の所定範囲内(例えば、車両前端から3m四方の範囲)を前方エリア903に決定する。また、警告対象検出部603は、特定した車両後方の所定範囲内(例えば、車両の後端から3m四方の範囲)を後方エリア904に決定する。
Further, the warning
警告対象検出部603は、車両の前方エリア903および後方エリア904を決定すると、かかるエリアの両方に警告対象が存在するか検出を実行する(ステップS042)。具体的には、警告対象検出部603は、車両の前方エリア903および後方エリア904を示す地点座標に、ポリゴンデータや進入禁止領域といった警告対象が有する地点座標が含まれるか否かを判定する。
When the warning
そして、車両の前方エリア903および後方エリア904の各々の地点座標に、警告対象の地点座標が含まれる場合(ステップS042でYes)、すなわち、前方エリア903および後方エリア904の両方に警告対象が存在することを検出した場合、警告対象検出部603は、処理をステップS043に移行し、警告対象からより近いのが前方エリア903であるか、または後方エリア904であるか、を特定する。
If the point coordinates of the warning target are included in the point coordinates of the
具体的には、警告対象検出部603は、前方エリア903にある警告対象と車両の前端との間の距離を算出する。また、警告対象検出部603は、後方エリア904にある警告対象と車両の後端との間の距離を算出する。そして、警告対象検出部603は、算出した距離同士を比較し、警告対象からより近いのが車両の前方エリア903であるか、後方エリア904であるかを特定する。
Specifically, the warning
一方で、前方エリア903および後方エリア904の各々の地点座標に、警告対象の地点座標が含まれない場合(ステップS042でNo)、警告対象検出部603は、ステップS042の処理を繰り返し実行する。
On the other hand, when the point coordinates of the warning target are not included in the point coordinates of the
図17の具体例では、車両は壁Bを後方にしてバック(後進)しているため、ログ情報220が有するレコード241〜243にはリバース(R)が記録される。また、車両が所定の位置まで来ると、壁Aおよび壁Bが各々、車両の前方エリア903および後方エリア904内に含まれる。そうすると、壁Aおよび壁Bは警告対象として検出され、かかる警告対象からより近いのが前方エリア903であるか、または、後方エリア904であるか、が特定される(ステップS043)。
In the specific example of FIG. 17, since the vehicle is backing (backward) with the wall B facing backward, reverse (R) is recorded in the
この場合、車両と壁Aとの距離はL1と算出される。また、車両と壁Bとの距離はL2と算出される。ここでL1>L2であることから、警告対象からより近いのは車両の後方エリア904であることが特定されることになる。
In this case, the distance between the vehicle and the wall A is calculated as L1. Further, the distance between the vehicle and the wall B is calculated as L2. Here, since L1> L2, it is specified that the vehicle closer to the warning object is the
警告対象からより近いのが前方エリア903であるか、または後方エリア904であるか、を特定した警告対象検出部603は、特定したエリア(前方エリア903または後方エリア904)をログ情報220に記録する(ステップS044)。具体的には、警告対象検出部603は、警告対象の検出時に生成されているレコード221のうち、最新レコードの警告対象が存在するエリア224に「前方エリア」または「後方エリア」を記録する。
The warning
図17の具体例では、駐車エリアに進入する際の車両位置により、壁Aが壁Bに比べて近くにある場合と、壁Bが壁Aに比べて近くにある場合と、がある。したがって、警告対象検出部604は、車両位置に応じて、より近い警告対象が存在するエリア(前方エリア903または後方エリア904)をログ情報220に記録する。
In the specific example of FIG. 17, there are a case where the wall A is closer to the wall B and a case where the wall B is closer to the wall A depending on the vehicle position when entering the parking area. Therefore, the warning
具体的には、ログ情報220が有するレコード240、241が生成された時点で、壁Bと後方エリアとの間の距離に比べて、壁Aと前方エリアとの間の距離が近いと判定した場合、警告対象検出部604は、ログ情報220の警告対象が存在するエリア224に「前方エリア」を記録する。
Specifically, when the
一方で、ログ情報220が有するレコード242、243が生成された時点で、壁Aと前方エリアとの間の距離に比べて、壁Bと後方エリアとの間の距離が近いと判定した場合、警告対象検出部604は、警告対象が存在するエリア224に「後方エリア」を記録する。
On the other hand, when the
なお、ステップS043において、前方エリア903および後方エリア904の両方に対象が存在しないと判定した場合、レコードの警告対象が存在するエリア224には何も記録されない。
If it is determined in step S043 that there is no target in both the
このように、警告対象がより近くに存在するエリア(前方エリア903または後方エリア904)が記録されたログ情報220を用いて警告判定処理(説明は省略)が実行されることになる。
As described above, the warning determination process (the description is omitted) is executed using the
このような第三実施形態に係る発明によれば、車両を動かす方向の間違いをより確実に防止することができる。特に、本実施形態に係る発明では、車両の前方および後方の両方に警告対象がある場合でも、車両により近いエリア(前方または後方)を特定できる。その結果、衝突する可能性のより高い方向への移動時のみ衝突回避の警告を出力することができる。 According to the invention according to the third embodiment, an error in the direction of moving the vehicle can be prevented more reliably. In particular, in the invention according to the present embodiment, an area closer to the vehicle (front or rear) can be specified even when there are warning targets both in front and rear of the vehicle. As a result, a collision avoidance warning can be output only when moving in a direction in which there is a higher possibility of collision.
なお、前述の実施形態では、所定の場合に出力部から所定の警告が出力されたが、本発明はこれらの実施形態に限られるものではない。第一変形例では、所定の警告が行われるのと同時に、シートベルトやECU350の制御を行うための信号が出力される。
In the above-described embodiment, a predetermined warning is output from the output unit in a predetermined case, but the present invention is not limited to these embodiments. In the first modification, a signal for controlling the seat belt and the
具体的には、第一変形例に係る車両警告装置100は、所定の警告を生成するのと同時に、アクセルペダル352の動作を所定時間(例えば、5秒間)に無効にする信号を生成する。また、車両警告装置100は、車両制御部300を介して、生成した信号をECU350に出力する。このような第一変形例によれば、警告の出力が必要な場合、すなわち、車両の移動する方向に障害物が存在すると判定された場合、アクセルペダル352による車両の動きを一時的に無効化することができる。つまり、警告の出力と同時にアクセルペダル352が踏み込まれても、直ぐには車両が動き出さないように制御することができる。
Specifically, the
また、シートベルトの締め付け力を制御する制御部が車両に実装されている場合、かかる制御部に対して、締め付け力を変化させる信号を出力するようにしてもよい。具体的には、車両警告装置100は、所定の警告を生成するのと同時に、シートベルトの締め付け力を変化させる信号を生成する。そして、警告の出力と同時に、車両制御部300を介して、生成した信号をシートベルトの制御部に出力する。このようにすれば、たとえディスプレイ10から出力された警告にユーザが気付かない場合でも、シートベルトの締め付け力が変化することによりユーザに注意を喚起することができる。
Moreover, when the control part which controls the fastening force of a seatbelt is mounted in the vehicle, you may make it output the signal which changes fastening force with respect to this control part. Specifically, the
以上のような第一変形例に係る発明によれば、ユーザに対してより強い注意を喚起することができる。その結果、視聴覚的に所定の警告に気付かない場合でも、衝突事故を回避することができる。 According to the invention according to the first modified example as described above, it is possible to call stronger attention to the user. As a result, it is possible to avoid a collision accident even when the predetermined warning is not noticed visually.
また、本発明は、前述の実施形態および変形例に限られるものではない。第二変形例では、車両警告装置100に学習機能を持たせ、出力された警告をキャンセルした場所で再度の警告を出力しないようにする。例えば、前述の第一実施形態では、停車直前の移動方向(前進または後進)と同じ方向に建物などの障害物や進入禁止領域が存在しない場合も想定し得る。また、広い駐車場では、停車直前の移動方向と同じ方向に他の車両が無い場合、その方向から出口に向かうことできる。第二変形例では、このような場合に有効に機能する学習機能を備える。
Further, the present invention is not limited to the above-described embodiments and modifications. In the second modification, the
具体的には、車両警告装置100は、出力された警告をキャンセルする指示をユーザから受け付けた場合、かかる地点を含む所定範囲(例えば、特定地点を中心として半径500mの範囲内)を地図情報から特定する。また、車両警告装置100は、特定した地点を記憶装置11に記憶する。そして、車両警告装置100は、所定の警告を生成する前に、現在地がキャンセル指示を受け付けた地点を含む所定の範囲内であると判定した場合、所定の警告を示す情報の生成を行わないようにする。
Specifically, when the
このような第二変形例に係る発明によれば、警告の出力を必要としない場所において、再度の警告を出力することを回避することができる。 According to the invention according to the second modified example, it is possible to avoid outputting the warning again in a place where the warning output is not required.
また、前述の実施形態および変形例では、ポリゴンデータや進入禁止領域の地点座標を用いて、車両と警告対象と間の距離を算出した。しかしながら、本発明はこれらの実施形態および変形例に限られるものではない。第三変形例では、例えば、車両に搭載されたカメラや超音波センサを用いて、車両と警告対象との間の距離を算出し、所定の警告を出力するようにする。 In the above-described embodiment and modification, the distance between the vehicle and the warning target is calculated using the polygon data and the point coordinates of the entry prohibition area. However, the present invention is not limited to these embodiments and modifications. In the third modification, for example, a distance between the vehicle and the warning target is calculated using a camera or an ultrasonic sensor mounted on the vehicle, and a predetermined warning is output.
具体的には、CCD(Charge−Coupled Device)など、撮像素子および広角レンズが備わり、比較的に被写界深度の深いカメラが車両に搭載されている場合、車両警告装置100は、カメラで撮像された画像データに基づいて、車両の前方エリアまたは後方エリアに存在する警告対象を検出する。
Specifically, when an image sensor such as a charge-coupled device (CCD) and a wide-angle lens are provided and a camera having a relatively deep depth of field is mounted on the vehicle, the
具体的には、車両警告装置100は、撮像画像から被写体同士の輝度差、トーンの違いを解析し、車両と被写体との間の距離を算出する。そして、かかる被写体が車両の前方エリアまたは後方エリアに含まれる距離内に存在すると判定した場合、車両警告装置100は、かかる被写体を警告対象として検出し、所定の警告情報を生成する。なお、このようなカメラによる撮像画像を解析することによる障害物検出技術は従来の周知技術が用いられればよい。
Specifically, the
また、車両に超音波センサが搭載されている場合、送波器から発信した超音波を警告対象となる被写体に反射させ、反射した超音波を受波器で受信することにより、車両と警告対象との間の距離を算出するようにしてもよい。 In addition, when an ultrasonic sensor is mounted on a vehicle, the ultrasonic wave transmitted from the transmitter is reflected on the subject to be warned, and the reflected ultrasonic wave is received by the wave receiver to You may make it calculate the distance between.
このような第三変形例に係る発明によれば、たとえ地図データがポリゴンデータや進入禁止領域を含む情報を有していない場合でも、精度よく警告対象との衝突を回避することができる。 According to the invention according to the third modified example, even when the map data does not include information including polygon data and entry prohibition areas, it is possible to avoid collision with the warning target with high accuracy.
なお、本発明は、第一実施形態、第二実施形態、第三実施形態、第一変形例、第二変形例、第三変形例のいずれか、または、これらの複数が組み合わせられたものであってもよい。 The present invention is one of the first embodiment, the second embodiment, the third embodiment, the first modification, the second modification, the third modification, or a combination of these. There may be.
また、本発明は、ガソリンエンジンやディーゼルエンジンなどの内燃機関を動力源とする一般的な自動車でなく、例えば、電動モータを動力源とし、変速機(ギア)を有しない電気自動車(Electric Vehicle:EV)にも適用可能である。 In addition, the present invention is not a general automobile that uses an internal combustion engine such as a gasoline engine or a diesel engine as a power source, but an electric vehicle that uses an electric motor as a power source and does not have a transmission (gear), for example. EV).
100・・・車両警告装置、10・・・ディスプレイ、11・・・記憶装置、
13・・・音声入出力装置、16・・・入力装置、20・・・ROM装置、
21・・・車速センサ、22・・・ジャイロセンサ、23・・・GPS受信装置
24・・・FM多重放送受信装置、25・・・ビーコン受信装置
DESCRIPTION OF
13 ... voice input / output device, 16 ... input device, 20 ... ROM device,
DESCRIPTION OF
Claims (10)
車両が停車する前の移動方向を示す駆動ステータスと、停車後に検出した駆動ステータスと、が一致する場合に所定の警告を出力する警告手段と、
を備えることを特徴とする車両警告装置。 Detecting means for detecting a driving status indicating a moving direction of the vehicle;
Warning means for outputting a predetermined warning when the driving status indicating the moving direction before the vehicle stops and the driving status detected after the vehicle stops,
A vehicle warning device comprising:
前記警告手段は、
車両が停車する前の移動方向を示す駆動ステータスと、停車後に検出した駆動ステータスと、が一致する場合、シートベルトの締め付け力を変化させる信号またはアクセルペダルによる車両の動きを一時的に制限するための信号を出力する
ことを特徴とする車両警告装置。 The vehicle warning device according to claim 1,
The warning means is
To temporarily limit the movement of the vehicle by a signal or accelerator pedal that changes the tightening force of the seat belt when the drive status indicating the direction of travel before the vehicle stops matches the drive status detected after the vehicle stops The vehicle warning device characterized by outputting the signal.
前記警告手段は、
前記車両が停車する前の移動方向を示す駆動ステータスと、停車後に検出した駆動ステータスと、が一致しない場合、前記車両のアクセルペダルが踏まれるまでの間、駆動ステータスの監視状態を維持する
ことを特徴とする車両警告装置。 The vehicle warning device according to claim 1 or 2,
The warning means is
If the drive status indicating the direction of movement before the vehicle stops and the drive status detected after the vehicle stops, the drive status monitoring state is maintained until the accelerator pedal of the vehicle is depressed. A vehicle warning device.
車両の移動方向を示す駆動ステータスを検出する検出手段と、
警告対象が存在するエリアの方向を特定する特定手段と、
前記車両が停車する前で、かつ、前記警告対象が存在するエリアの方向に対応する駆動ステータスと、停車後に検出した駆動ステータスと、が一致する場合に所定の警告を出力する警告手段と、
を備えることを特徴とする車両警告装置。 Storage means for storing map data including position information of the warning target;
Detecting means for detecting a driving status indicating a moving direction of the vehicle;
A specific means for identifying the direction of the area where the warning object exists,
Warning means for outputting a predetermined warning when the driving status corresponding to the direction of the area where the warning target exists and the driving status detected after the vehicle stops before the vehicle stops, and
A vehicle warning device comprising:
車両の移動方向を示す駆動ステータスを検出する検出手段と、
車両により近い警告対象が存在するエリアの方向を特定する特定手段と、
前記車両が停車する前で、かつ、前記警告対象が存在するエリアの方向に対応する駆動ステータスと、停車後に検出した駆動ステータスと、が一致する場合に所定の警告を出力する警告手段と、
を備えることを特徴とする車両警告装置。 Storage means for storing map data including position information of the warning target;
Detecting means for detecting a driving status indicating a moving direction of the vehicle;
A specifying means for specifying the direction of the area where the warning object closer to the vehicle exists,
Warning means for outputting a predetermined warning when the driving status corresponding to the direction of the area where the warning target exists and the driving status detected after the vehicle stops before the vehicle stops, and
A vehicle warning device comprising:
前記警告手段は、
車両が停車する前の駆動ステータスと、停車後に検出した駆動ステータスと、が一致する場合に、シートベルトの締め付け力を変化させる信号またはアクセルペダルによる車両の動きを一時的に制限するための信号を出力する
ことを特徴とする車両警告装置。 The vehicle warning device according to claim 4 or 5,
The warning means is
When the driving status before the vehicle stops and the driving status detected after stopping, the signal for changing the tightening force of the seat belt or the signal for temporarily limiting the movement of the accelerator pedal A vehicle warning device characterized by outputting.
前記警告手段は、
前記車両が停車する前で、かつ、前記警告対象が存在するエリアの方向に対応する駆動ステータスと、停車後に検出した駆動ステータスと、が一致しない場合、前記車両のアクセルペダルが踏まれるまでの間、駆動ステータスの監視状態を維持する
ことを特徴とする車両警告装置。 The vehicle warning device according to any one of claims 4 to 6,
The warning means is
Before the vehicle stops and when the drive status corresponding to the direction of the area where the warning object exists does not match the drive status detected after the vehicle stops, until the accelerator pedal of the vehicle is depressed A vehicle warning device characterized by maintaining a driving status monitoring state.
車両が停車する前の移動方向を示す駆動ステータスと、停車後に検出した駆動ステータスと、が一致する場合に所定の警告を出力する警告ステップと、
を行うことを特徴とする車両警告方法。 A detecting step for detecting a driving status indicating a moving direction of the vehicle;
A warning step for outputting a predetermined warning when the drive status indicating the moving direction before the vehicle stops and the drive status detected after the vehicle stops,
Car warning method characterized by performing.
車両の移動方向を示す駆動ステータスを検出する検出ステップと、
警告対象が存在するエリアの方向を特定する特定ステップと、
前記車両が停車する前で、かつ、前記警告対象が存在するエリアの方向に対応する駆動ステータスと、停車後に検出した駆動ステータスと、が一致する場合に所定の警告を出力する警告ステップと、
を行うことを特徴とする車両警告方法。 Comprising storage means for storing map data including location information of the warning target;
A detecting step for detecting a driving status indicating a moving direction of the vehicle;
A specific step of identifying the direction of the area where the warning object exists,
A warning step of outputting a predetermined warning when the driving status corresponding to the direction of the area where the warning target exists and the driving status detected after the vehicle stops before the vehicle stops, and
Car warning method characterized by performing.
車両の移動方向を示す駆動ステータスを検出する検出ステップと、
車両により近い警告対象が存在するエリアの方向を特定する特定ステップと、
前記車両が停車する前で、かつ、前記警告対象が存在するエリアの方向に対応する駆動ステータスと、停車後に検出した駆動ステータスと、が一致する場合に所定の警告を出力する警告ステップと、
を行うことを特徴とする車両警告方法。 Comprising storage means for storing map data including location information of the warning target;
A detecting step for detecting a driving status indicating a moving direction of the vehicle;
A specific step of identifying the direction of the area where there is a warning object closer to the vehicle;
A warning step of outputting a predetermined warning when the driving status corresponding to the direction of the area where the warning target exists and the driving status detected after the vehicle stops before the vehicle stops, and
Car warning method characterized by performing.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011132693A JP2013003743A (en) | 2011-06-14 | 2011-06-14 | Vehicle warning device and vehicle warning method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011132693A JP2013003743A (en) | 2011-06-14 | 2011-06-14 | Vehicle warning device and vehicle warning method |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013003743A true JP2013003743A (en) | 2013-01-07 |
| JP2013003743A5 JP2013003743A5 (en) | 2014-07-24 |
Family
ID=47672262
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011132693A Pending JP2013003743A (en) | 2011-06-14 | 2011-06-14 | Vehicle warning device and vehicle warning method |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2013003743A (en) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015121960A (en) * | 2013-12-24 | 2015-07-02 | 三菱電機株式会社 | Erroneous start warning system and obstacle detection device |
| JP2018013949A (en) * | 2016-07-21 | 2018-01-25 | エスゼット ディージェイアイ テクノロジー カンパニー リミテッドSz Dji Technology Co.,Ltd | Mobile body, method for detecting obstacle of mobile body, and program for detecting obstacle of mobile body |
| CN113870554A (en) * | 2021-09-06 | 2021-12-31 | 北京中交兴路信息科技有限公司 | Vehicle safety monitoring method and device, storage medium and terminal |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007112335A (en) * | 2005-10-21 | 2007-05-10 | Denso Corp | Mistaken start suppression indicator, navigation device, and mistaken start suppression device |
| JP2007332837A (en) * | 2006-06-14 | 2007-12-27 | Aisin Aw Co Ltd | Operation support device |
| JP2008124553A (en) * | 2006-11-08 | 2008-05-29 | Alpine Electronics Inc | Obstacle warning apparatus |
| JP2008195268A (en) * | 2007-02-14 | 2008-08-28 | Denso Corp | Vehicle periphery monitoring device |
-
2011
- 2011-06-14 JP JP2011132693A patent/JP2013003743A/en active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007112335A (en) * | 2005-10-21 | 2007-05-10 | Denso Corp | Mistaken start suppression indicator, navigation device, and mistaken start suppression device |
| JP2007332837A (en) * | 2006-06-14 | 2007-12-27 | Aisin Aw Co Ltd | Operation support device |
| JP2008124553A (en) * | 2006-11-08 | 2008-05-29 | Alpine Electronics Inc | Obstacle warning apparatus |
| JP2008195268A (en) * | 2007-02-14 | 2008-08-28 | Denso Corp | Vehicle periphery monitoring device |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015121960A (en) * | 2013-12-24 | 2015-07-02 | 三菱電機株式会社 | Erroneous start warning system and obstacle detection device |
| JP2018013949A (en) * | 2016-07-21 | 2018-01-25 | エスゼット ディージェイアイ テクノロジー カンパニー リミテッドSz Dji Technology Co.,Ltd | Mobile body, method for detecting obstacle of mobile body, and program for detecting obstacle of mobile body |
| CN113870554A (en) * | 2021-09-06 | 2021-12-31 | 北京中交兴路信息科技有限公司 | Vehicle safety monitoring method and device, storage medium and terminal |
| CN113870554B (en) * | 2021-09-06 | 2022-11-25 | 北京中交兴路信息科技有限公司 | Vehicle safety monitoring method and device, storage medium and terminal |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5979259B2 (en) | Collision avoidance control device | |
| US9902398B2 (en) | Driving control device | |
| US11267468B2 (en) | Automatic driving assistance apparatus | |
| WO2015190212A1 (en) | Lane selecting device, vehicle control system and lane selecting method | |
| US10173680B2 (en) | Vehicle speed control device | |
| EP3121076A2 (en) | Vehicle control device | |
| JP2009276927A (en) | Empty parking space information transmitter and empty parking space guide system | |
| JP6383566B2 (en) | Fatigue level estimation device | |
| JP2005170154A (en) | Vehicle drive assisting device | |
| JP2010257086A (en) | Driving assistance apparatus, driving assistance method, and driving assistance program | |
| JP4432794B2 (en) | Stop control device | |
| JP2008077309A (en) | Vehicle control device | |
| JP2008210051A (en) | Driving support system for vehicle | |
| JP6477135B2 (en) | In-vehicle communication device and communication system | |
| JP4548154B2 (en) | Driving support device and driving support method | |
| JP4985450B2 (en) | Information providing apparatus, information providing system, vehicle, and information providing method | |
| WO2016129250A1 (en) | Communication system, vehicle-mounted device, and information center | |
| JP4225190B2 (en) | Vehicle driving support device | |
| JP2017156954A (en) | Automated driving system | |
| WO2018180756A1 (en) | Drive assistance system | |
| JP2014108643A (en) | Travel control device | |
| JP2019209763A (en) | Control device for vehicle | |
| JP2009008646A (en) | Onboard navigation device | |
| JP2013003743A (en) | Vehicle warning device and vehicle warning method | |
| JP4840351B2 (en) | Stop guidance device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140609 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140609 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150227 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150310 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20150714 |