JP2012240532A - Travel control device for vehicle - Google Patents
Travel control device for vehicle Download PDFInfo
- Publication number
- JP2012240532A JP2012240532A JP2011111743A JP2011111743A JP2012240532A JP 2012240532 A JP2012240532 A JP 2012240532A JP 2011111743 A JP2011111743 A JP 2011111743A JP 2011111743 A JP2011111743 A JP 2011111743A JP 2012240532 A JP2012240532 A JP 2012240532A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- command value
- inter
- target
- target acceleration
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images








Landscapes
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Controls For Constant Speed Travelling (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
Abstract
Description
本発明は、自車周囲に他車が存在している状態で走行する場面などにおける、先行車に追従する走行制御の技術に関する。 The present invention relates to a travel control technique for following a preceding vehicle in a scene where the vehicle travels in a state where other vehicles exist around the host vehicle.
追従走行を行う車両用走行制御装置としては、例えば特許文献1、2に記載の技術がある。この特許文献1、2に記載の技術では、隊列を構成する各車両にそれぞれ通信用IDを搭載していることを前提とし、車両相互で車車間通信を行いながら小隊列を組んで走行する。この隊列走行では、例えば、車車間通信によって先行車から制御操作量、走行状態量、車両諸元などのデータを受信し、受信したデータと自車両の状況に基づいて、先行車に追従するように自車の制御操作量を演算する。また路車間通信を行いながら走行する。
As a vehicle travel control device that performs follow-up travel, for example, there are technologies described in
しかし、車車間通信や路車間通信などの通信遅れや、アクチュエータの応答遅れなどの無駄時間が存在すると、制御による減速タイミングが遅くなってしまうことがある。そして、この遅れが発生すると、運転者に違和感を与える可能性がある。またこのとき、車群を形成する車間距離が短くなることに起因して、先行車の減速に対して後続車(自車)の運転者がブレーキ操作を行ってしまうことで、隊列走行が解除されて車群が維持できなくなる可能性がある。
本発明は、上記のような点に着目してなされたもので、先行車に追従するように走行制御を実施する際に、より適切なタイミングで加減速を発生可能とすることを目的としている。
However, if there is a dead time such as a communication delay such as a vehicle-to-vehicle communication or a road-to-vehicle communication or a response delay of an actuator, the deceleration timing by the control may be delayed. And when this delay occurs, there is a possibility that the driver feels uncomfortable. In addition, at this time, due to the reduction in the distance between vehicles forming the vehicle group, the driver of the following vehicle (own vehicle) performs a braking operation against the deceleration of the preceding vehicle, and the platooning is released. The vehicle group may not be maintained.
The present invention has been made paying attention to the above points, and it is an object of the present invention to enable acceleration / deceleration at a more appropriate timing when carrying out travel control so as to follow the preceding vehicle. .
上記課題を解決するために、本発明の一形態は、目標車間時間とするための第1目標加減速度指令値、または目標車間距離を達成するための第2目標加減速度指令値のいずれかの目標加減速度指令値を、自車の走行状態及び自車周囲の他車両の走行状態の少なくとも一方の走行状態に基づき選択する。そして、選択した目標加減速度指令値で自車の駆動装置及び制動装置の少なくとも一方を制御する。 In order to solve the above-described problem, an aspect of the present invention provides either a first target acceleration / deceleration command value for achieving a target inter-vehicle time or a second target acceleration / deceleration command value for achieving a target inter-vehicle distance. The target acceleration / deceleration command value is selected based on the traveling state of at least one of the traveling state of the host vehicle and the traveling state of other vehicles around the host vehicle. Then, at least one of the driving device and the braking device of the own vehicle is controlled by the selected target acceleration / deceleration command value.
本発明によれば、自車の走行状態及び自車周囲の他車両の走行状態の少なくとも一方の走行状態に応じて、目標車間時間による制御と目標車間距離による制御との切り換えを実施する。これによって、先行車への追従の状態に応じた制御を選択可能となる。この結果、より適切なタイミングで加減速を発生可能とすることも可能となる。 According to the present invention, switching between the control based on the target inter-vehicle time and the control based on the target inter-vehicle distance is performed according to at least one of the travel state of the own vehicle and the travel state of other vehicles around the own vehicle. As a result, it is possible to select control according to the state of following the preceding vehicle. As a result, acceleration / deceleration can be generated at a more appropriate timing.
次に、本発明の実施形態について図面を参照して説明する。
「第1実施形態」
(構成)
車両は、制動力を発生する制動装置、及び駆動力(駆動トルク)を発生する駆動装置を備える。
制動装置は、図1に示すように、車輪13に設けられるブレーキ装置10と、その各ブレーキ装置10に接続する配管を含む流体圧回路11と、ブレーキコントローラ6Aとを備える。ブレーキコントローラ6Aは、上記流体圧回路15を介して各ブレーキ装置10で発生する制動力を、制動力指令値に応じた値に制御する。ブレーキ装置10は、流体圧で制動力を付与する装置に限定されず、電動ブレーキ装置等であっても良い。
Next, embodiments of the present invention will be described with reference to the drawings.
“First Embodiment”
(Constitution)
The vehicle includes a braking device that generates a braking force and a driving device that generates a driving force (driving torque).
As shown in FIG. 1, the braking device includes a
駆動装置は、図1に示すように、駆動源としてのエンジン12と、エンジン12で発生するトルク(駆動力)を制御するエンジンコントローラ6Bとを備える。駆動装置の駆動源は、エンジン12に限定されず、電動モータであっても良いし、エンジン12とモータを組み合わせたハイブリッド構成であっても良い。
上記ブレーキコントローラ6Aとエンジンコントローラ6Bは、それぞれ上位コントローラである走行制御コントローラ5からの制動指令、駆動指令の各指令値(制駆動力制御量)を受け付ける構成とする。ブレーキコントローラ6Aとエンジンコントローラ6Bは、加減速制御装置を構成する。
As shown in FIG. 1, the drive device includes an
The brake controller 6 </ b> A and the engine controller 6 </ b> B are configured to receive each command value (braking / driving force control amount) of a braking command and a driving command from the
また車両は、図1及び図2に示すように、制御作動用スイッチ1、車輪速センサ2、外界認識装置3、通信装置4を備える。また、車両は、走行制御コントローラ5を備える。
制御作動用スイッチ1は、走行制御の作動の開始指示及び終了指示、または走行制御の設定車速の変更指示を行うための操作子である。制御作動用スイッチ1は、先行車に追従するための加減速制御を行うメインスイッチや、追従時の目標車間時間を切り替えるスイッチ、設定車速を変更するためのスイッチを備える。この制動作動用スイッチの状態は、走行制御コントローラ5に出力される。またこの制御作動用スイッチ1は、例えばステアリングホイールに設けられている。
As shown in FIGS. 1 and 2, the vehicle includes a control operation switch 1, a
The control operation switch 1 is an operator for issuing a start instruction and an end instruction for the operation of the travel control or an instruction for changing the set vehicle speed of the travel control. The control operation switch 1 includes a main switch that performs acceleration / deceleration control for following the preceding vehicle, a switch that switches a target inter-vehicle time during tracking, and a switch that changes a set vehicle speed. The state of the brake operation switch is output to the
車輪速センサ2は、車輪速を検出し、検出した車輪速情報を走行制御コントローラ5に出力する。車輪速センサ2は、例えば車輪速パルスを計測するロータリエンコーダなどのパルス発生器で構成する。
外界認識装置3は、自車前方に存在する先行車を認識し、その認識した先行車の状態として、当該先行車両の有無及び走行状態を検出を検出する。検出した先行車の状態に関する情報は、走行制御コントローラ5に出力される。外界認識装置3は、例えばレーザ距離計やカメラによって構成する。
The
The outside recognition device 3 recognizes a preceding vehicle existing ahead of the host vehicle, and detects the presence or absence of the preceding vehicle and the running state as the recognized preceding vehicle state. Information regarding the detected state of the preceding vehicle is output to the
通信装置4は、車車間通信若しくは路車間通信などの通信手段を用いて、自車両周囲の車両の走行状態を取得し、取得した走行状態を走行制御コントローラ5に出力する。
走行制御コントローラ5は、制御作動用スイッチ1がON(制御作動要求)であると判定した場合には、制御作動用スイッチ1の作動状態と、車輪速センサ2からの信号に基づく自車速と、外界認識装置3が検出した先行車の走行状態に関する情報と、通信装置4が取得した自車両周囲の車両の走行状態とに基づき、先行車に対する追従走行その他の走行制御を行う。本実施形態の走行制御コントローラ5は、予め設定した目標車間時間に基づく車間時間制御と目標車間距離に基づく車間距離維持制御との2つの制御状態を、自車の走行状態及び自車周囲の車両の走行状態に応じて選択して遷移させる。そして、走行制御コントローラ5は、制御の状態遷移に応じた制御指令値を加減速制御装置6へ出力する。上記目標車間距離維持制御は、通信装置4から得られる自車両周囲車両の走行状態を用いて、制御指令値を算出する。そして、加減速制御装置6を構成するブレーキコントローラ6A及びエンジンコントローラは、受信した加減速制御量(制御指令値)となるように車両の加減速を制御する。
The communication device 4 acquires the traveling state of the vehicle around the host vehicle using communication means such as inter-vehicle communication or road-to-vehicle communication, and outputs the acquired traveling state to the
When the
上記走行制御コントローラ5は、マイクロコンピュータおよびその周囲回路を備えるコントローラである。この走行制御コントローラ5は、本実施形態の走行制御を実現するために、図3に示すような処理ロジックを備える。すなわち、走行制御コントローラ5は、図3に示すように、制御状態設定部5A、先行車検出状態判定部5B、先行車車速・減速度推定部5C、目標応答特性算出部5D、目標車速算出部5E、目標加減速度算出部5F、車速指令値算出部5G、車速サーボ演算部5J、トルク配分制御演算部5K、エンジントルク演算部5L、及びブレーキ液圧演算部5Mを備える。さらに、走行制御コントローラ5は、自車両周囲走行車両状態検出部5N、車間距離制御指令値算出部5P、車間距離制御作動判断部5Q、及び制御状態遷移判断部5Iを備える。
The
制御状態設定部5Aは、上記制御作動用スイッチ1の作動状態に基づき、制御を作動させるための各種スイッチ操作の有無判断を行う。運転者による制御作動用スイッチ1の操作状態を検出し、検出結果を、先行車検出状態判定部5B及び車速指令値算出部5Gに出力する。ここで、隊列走行を行うと判定した場合には、追従時の目標車間時間は固定とする構成であっても良い。なお、予め設定した車両前方に対し、先行車の存在を検出しない場合には、設定車速を車速指令値とする。
The control
先行車検出状態判定部5Bは、追従制御対象となる先行車の検出状態を判断する。すなわち、先行車検出状態判定部5Bは、外界認識装置3から得られる自車前方を走行する先行車両と自車との間の車間相対値と、制御状態設定部5Aから得られた運転者のスイッチ操作とに基づき、追従制御対象となる先行車の有無を判断する。そして、判断結果を先行車車速・減速度推定部5Cへ出力する。ここで、本実施形態の上記車間相対値は、車間距離及び相対速度である。
The preceding vehicle detection
先行車車速・減速度推定部5Cは、先行車検出状態判定部5Bが追従制御対象が存在すると判定した場合に、当該追従制御対象となる先行車の車速及び加減速度の推定値を算出する。そして、算出した先行車車速推定値、及び先行車加減速度推定値を目標応答特性算出部5Dへ出力する。
目標応答特性算出部5Dは、先行車の加減速度に対して、どのような応答特性とするかを算出する。目標応答特性算出部5Dは、先行車車速・減速度推定部5Cが算出した先行車速度推定値と先行車加減速度推定値と、制御状態設定部5Aから取得した追従時の目標車間時間設定値を基に、目標応答特性を算出する。ここで、追従時の目標車間時間は運転者のスイッチ操作により選択可能としているが、複数台での隊列走行を行うと判定した場合は、目標車間時間設定値を固定としても良い。
When the preceding vehicle detection
The target response
目標車速算出部5Eは、目標応答特性算出部5Dで算出された目標応答特性を満足する目標車速を算出する。目標車速算出部5Eは、算出した目標車速を目標加減速度算出部5Fへ出力する。
目標加減速度算出部5Fは、目標車速算出部5Eが算出した目標車速を基に、目標加減速度を算出し、算出した目標加減速度を車速指令値算出部5Gへ出力する。
The target vehicle
The target acceleration / deceleration calculation unit 5F calculates the target acceleration / deceleration based on the target vehicle speed calculated by the target vehicle
車速指令値算出部5Gは、目標加減速度算出部5Fが算出した目標加減速度に対し加減速度の変化率リミッタを付加し、そのリミッタ処理をした目標加減速度から車速指令値を算出する。そして、車速指令値算出部5Gで算出された車速指令値は、車速サーボ演算部5Jで使用される。ここで、本実施形態では先行車に追従しているものとして記述する。自車前方の予め設定した先方距離内に先行車両が存在しないなど、先行車非追従時の場合は、運転者が設定した設定車速が車速指令値となる。
The vehicle speed command
自車両周囲走行車両状態検出部5Nは、通信装置4から得られる自車両の周囲を走行する車両の有無を含む自車両周囲の車両の走行状態を検出し、検出した走行状態を車間距離制御指令値算出部5Pに出力する。
車間距離制御指令値算出部5Pは、自車両周囲走行車両状態検出部5Nが検出した自車両の周囲を走行している車両の走行状態から、追従走行を行うための車間距離維持制御のための指令値を算出する。また目標車間距離の設定を行う。
The own vehicle surrounding traveling vehicle
The inter-vehicle distance control command
車間距離制御作動判断部5Qは、車間距離制御指令値算出部5Pが算出した車間距離制御指令値に対して、車間距離維持制御を作動させるか否かを判定する。そして、判断する。車間距離制御作動判断部5Qは、判定結果を制御状態遷移判断部5Iに出力する。
制御状態遷移判断部5Iは、車間距離制御作動判断部5Qの判定結果に基づき、車間時間制御と車間距離維持制御の間の制御の状態遷移を行う。すなわち、制御状態遷移判断部5Iは、車間時間制御と車間距離維持制御のいずれかの選択を行って、制御状態の遷移を行う。
The inter-vehicle distance control operation determination unit 5Q determines whether to operate the inter-vehicle distance maintenance control with respect to the inter-vehicle distance control command value calculated by the inter-vehicle distance control command
Based on the determination result of the inter-vehicle distance control operation determining unit 5Q, the control state transition determining unit 5I performs a control state transition between the inter-vehicle time control and the inter-vehicle distance maintenance control. That is, the control state transition determination unit 5I performs a transition of the control state by selecting one of the inter-vehicle time control and the inter-vehicle distance maintenance control.
車速サーボ演算部5Jは、制御状態遷移判断部5Iが車間時間制御を選択と判定した場合には、車速指令値演算部で演算された車速指令値となるように車両を制駆動制御する処理を行う。すなわち、車速サーボ演算部5Jは、選択された車速指令値を達成するための目標加減速度を演算し、演算した車速指令値に対し演算した目標加減速度をトルク分配制御演算部へ出力する。
When the control state transition determination unit 5I determines that the inter-vehicle time control is selected, the vehicle speed
トルク配分制御演算部5Kは、車速サーボ演算部5Jが演算した目標加減速度に応じたエンジントルク、ブレーキトルクのトルク配分を演算する。そして、分配されたトルクを、それぞれエンジントルク演算部5L及び、ブレーキ液圧演算部5Mへ出力する。
エンジントルク演算部5Lは、トルク配分制御演算部5Kで配分されたトルクを達成するためのエンジントルク指令値を算出する。エンジントルク指令値はスロットル開度等である。エンジントルク演算部5Lは、算出したエンジントルク指令値をエンジンコントローラ6Bに出力する。
ブレーキ液圧演算部5Mは、トルク配分制御演算部5Kで配分されたトルクを達成するためのブレーキ液圧指令値を算出し、算出したブレーキ液圧指令値をブレーキコントローラ6Aに出力する。
The torque distribution
Engine
The brake hydraulic
次に、上記走行制御コントローラ5における追従走行の走行制御に関わる処理を、図4のフローチャートを参照して説明する。この処理は、予め設定した制御時間毎に実施される。
先ずステップS10では、走行制御コントローラ5は、各センサ及び他のコントローラからの各種データを読み込む。具体的には、制御作動用スイッチ1の、各種スイッチ、外界認識装置3から先車両情報として車間距離vDistance、相対速度vVR、各輪の車輪速Vwi(i=1〜4)を読み込む。
Next, processing related to the travel control of the follow-up travel in the
First, in step S10, the traveling
次に、ステップS20では、自車速Vを算出する。本実施形態では、通常走行時には、例えば後輪駆動の車両の場合は、下記(1)式により前輪の車輪速Vw1,Vw2の平均値として自車速Vを算出する。Vw1,Vw2は、タイヤ径に基づき求めた車速換算値とする。
V=(Vw1+Vw2)/2 ・・・(1)
なお、ABS制御などの車速を用いた他のシステムが作動している場合には、そのような他のシステムで使用している自車速(推定車速)を用いても良い。
Next, in step S20, the host vehicle speed V is calculated. In the present embodiment, during normal traveling, for example, in the case of a rear-wheel drive vehicle, the host vehicle speed V is calculated as an average value of the wheel speeds Vw 1 and Vw 2 of the front wheels by the following equation (1). Vw 1 and Vw 2 are vehicle speed converted values obtained based on the tire diameter.
V = (Vw 1 + Vw 2 ) / 2 (1)
When other systems using vehicle speed such as ABS control are operating, the own vehicle speed (estimated vehicle speed) used in such other systems may be used.
ステップS30では、設定された目標車間時間を達成するための目標車間距離Ltを算出する。
例えば、車間時間をTgap、先行車車速Vtとすると、目標車間距離Ltは、下記(2)式によって算出できる。
Lt=Vt×Tgap ・・・(2)
In step S30, a target inter-vehicle distance Lt for achieving the set target inter-vehicle time is calculated.
For example, if the inter-vehicle time is Tgap and the preceding vehicle speed Vt, the target inter-vehicle distance Lt can be calculated by the following equation (2).
Lt = Vt × Tgap (2)
ここで、先行車車速Vtは相対速度vVRと自車速Vから算出する。車間時間Tgapは、運転者のスイッチ操作に基づき選択する。ただし、交通効率を向上させるための複数台での隊列走行を行う際には、予め設定した固定値としても良い。また、隊列走行に設定する車間時間は、ACC制御の車間時間よりも短い車間時間とすることで、より交通効率を向上させることが可能となる。 Here, the preceding vehicle speed Vt is calculated from the relative speed vVR and the host vehicle speed V. The inter-vehicle time Tgap is selected based on the driver's switch operation. However, when carrying out platooning with a plurality of vehicles to improve traffic efficiency, a fixed value set in advance may be used. In addition, it is possible to further improve the traffic efficiency by setting the inter-vehicle time set for the platooning to be a shorter inter-vehicle time than the ACC-controlled inter-vehicle time.
ステップS33では、自車両周囲走行車両状態検出部5Nが、自車の周囲を走行する車両の走行状態を検出する。具体的には、車車間通信や、路車間通信を用いて自車の周囲を走行している車両の走行状態を検出する。すなわち、通信装置4を用いて、自車の周囲の車両の車速、加減速度など走行状態を送受信する。なお、自車の周囲は、自車から予め設定した範囲内の領域を指す。例えば自車両を中心に進行方向に長軸を向けた予め設定した大きさの楕円形形状の領域内を対象とする。
In step S33, the host vehicle surrounding traveling vehicle
本実施形態では、ステップS33において、先行車の走行状態として先行車の減速開始を検出する。例えば、ブレーキ操作を検出するブレーキスイッチがONとなったことを、通信装置4を介して受信することで、先行車の減速を検出するとする。
ステップS36では、ステップS33の処理で先行車の減速開始を検出した場合には、そのときの車間距離を目標車間距離に設定する。また、車間距離用の制御指令値として、追従時の車間距離を維持するための予め設定した制駆動力指令値を車間距離制御指令値として算出する。本実施形態では、制駆動力指令値としてブレーキ液圧指令値を車間距離制御指令値として算出する。
ステップS39では、車間距離制御作動判断部5Qが、ステップS36にて制駆動力指令値を車間距離制御指令値として算出したと判定すると、車間距離維持制御作動フラグを「1」に設定する。
In this embodiment, in step S33, the start of deceleration of the preceding vehicle is detected as the traveling state of the preceding vehicle. For example, it is assumed that the deceleration of the preceding vehicle is detected by receiving via the communication device 4 that the brake switch that detects the brake operation is turned on.
In step S36, when the start of deceleration of the preceding vehicle is detected in the process of step S33, the inter-vehicle distance at that time is set as the target inter-vehicle distance. Further, as a control command value for the inter-vehicle distance, a braking / driving force command value set in advance for maintaining the inter-vehicle distance at the time of following is calculated as the inter-vehicle distance control command value. In the present embodiment, the brake fluid pressure command value is calculated as the inter-vehicle distance control command value as the braking / driving force command value.
In step S39, if the inter-vehicle distance control operation determination unit 5Q determines that the braking / driving force command value is calculated as the inter-vehicle distance control command value in step S36, the inter-vehicle distance maintenance control operation flag is set to “1”.
ステップS40では、目標応答特性を算出する。ステップS40では、ステップS30で設定した目標車間距離Ltを実現するための応答特性として、目標車速Vtargetを算出する。先ず、第1目標車速Vrefを、先行車と自車両との間の車間相対値と目標車間相対値との偏差に基づき算出する。本実施形態では、車間相対値として、先行車と自車両との間の車間距離及び相対速度を使用する場合とする。すなわち本実施形態では、下記(3)式のように、目標車間距離と車間距離とのと車間距離偏差、目標相対速度vVTと相対速度の相対速度偏差、及び先行車速のそれぞれに対して、それぞれにゲインK1、K2、K3をかけた値を変数とする関数から、第1目標速度Vref求める。目標相対速度vVTは、例えばゼロとする。
Vref = f( K1×(vVR−vVT)、
K2×(Lt−vDistance)、
K3×vVR)・・・(3)
In step S40, a target response characteristic is calculated. In step S40, a target vehicle speed Vtarget is calculated as a response characteristic for realizing the target inter-vehicle distance Lt set in step S30. First, the first target vehicle speed Vref is calculated based on the deviation between the inter-vehicle relative value between the preceding vehicle and the host vehicle and the target inter-vehicle relative value. In this embodiment, the inter-vehicle distance and relative speed between the preceding vehicle and the host vehicle are used as the inter-vehicle relative value. That is, in the present embodiment, as shown in the following equation (3), for each of the target inter-vehicle distance and the inter-vehicle distance deviation, the target relative speed vVT and the relative speed deviation of the relative speed, and the preceding vehicle speed, respectively. The first target speed Vref is obtained from a function having a value obtained by multiplying the gains K1, K2, and K3 by a variable. The target relative speed vVT is set to zero, for example.
Vref = f (K1 × (vVR−vVT),
K2 × (Lt-vDistance),
K3 × vVR) (3)
そして、上記第1目標車速Vrefに対して、下記(4)式に基づき、予め設定した伝達特性を持たせた目標車速Vtargetを算出する。ここで、上記(4)式では、伝達特性として1次遅れ系のフィルタを施す場合を例示している。 Then, a target vehicle speed Vtarget having a preset transfer characteristic is calculated for the first target vehicle speed Vref based on the following equation (4). Here, the above formula (4) exemplifies a case where a first-order lag filter is applied as the transfer characteristic.

次に、ステップS50では、上記目標車速Vtargetに基づき目標加減速度を算出する。ステップS50では、ステップS40で算出した目標応答特性を実現するための目標加減速度Xgtを、下記(5)式に基づき算出する。ここでは、変数が自車速Vと目標車速Vtargetの関数を採用する。
Xgt = f(V、Vtarget)・・・(5)
(5)式の関数は、例えば、自車速と目標車速との車速偏差(V−Vtarget)が予め設定した値より小さい場合は、前回の目標加減速度を小さくし、その車速偏差が予め設定した値より大きい場合は、前回の目標加減速度を大きくするような関数とする。
Next, in step S50, a target acceleration / deceleration is calculated based on the target vehicle speed Vtarget. In step S50, the target acceleration / deceleration Xgt for realizing the target response characteristic calculated in step S40 is calculated based on the following equation (5). Here, the variable employs a function of the host vehicle speed V and the target vehicle speed Vtarget.
Xgt = f (V, Vtarget) (5)
For example, when the vehicle speed deviation (V-Vtarget) between the host vehicle speed and the target vehicle speed is smaller than a preset value, the previous target acceleration / deceleration is reduced and the vehicle speed deviation is preset. When the value is larger than the value, the function is to increase the previous target acceleration / deceleration.
ステップS60では、ステップS50で算出した目標加減速度Xgtから目標車速指令値を算出する。具体的には、ステップS50で算出した目標加減速度Xgtに対して、予め設定した範囲に変化量を抑える加減速度リミッタ処理を施して、リミッタ処理後の目標加減速度Xgtargetを求め、そのリミッタ処理後の目標加減速度Xgtargetに基づき、(6)式によって目標車速指令値Vtargetを算出する。加減速度リミッタ処理は、例えば前回値と今回値との差分を取り、その差分が予め設定した差分閾値以上の場合には、前回値に差分閾値を加えた値を今回の目標加減速度Xgtargetとする。目標加減速度Xgtargetは、第1目標加減速度指令値に相当する。
Vtarget=f(Xgtarget)× Stime・・・(6)
ここで、ここで、Stimeは予め設定した時間をあらわす。
In step S60, a target vehicle speed command value is calculated from the target acceleration / deceleration Xgt calculated in step S50. Specifically, an acceleration / deceleration limiter process that suppresses the amount of change within a preset range is performed on the target acceleration / deceleration Xgt calculated in step S50 to obtain a target acceleration / deceleration Xgttarget after the limiter process, and after the limiter process The target vehicle speed command value Vtarget is calculated by the equation (6) based on the target acceleration / deceleration Xgtarget. The acceleration / deceleration limiter process takes, for example, a difference between the previous value and the current value, and if the difference is equal to or larger than a preset difference threshold value, a value obtained by adding the difference threshold value to the previous value is set as the current target acceleration / deceleration Xgtarget. . The target acceleration / deceleration Xgtarget corresponds to a first target acceleration / deceleration command value.
Vtarget = f (Xtarget) × Stime (6)
Here, Stime represents a preset time.
ステップS65では、制御状態を遷移させるか否かを判断する。具体的には、先行車の走行状態に応じて、車間距離維持制御と車間時間制御のいずれの制御状態を選択する。そして、その選択によって制御状態が変更する場合には、制御状態を遷移させる。
本実施形態では、先行車に一定速度で追従走行していると判定した場合には、自車の制御状態として、予め設定された車間時間で追従する車間時間制御を選択する。
In step S65, it is determined whether or not to change the control state. Specifically, either the inter-vehicle distance maintaining control or the inter-vehicle time control is selected according to the traveling state of the preceding vehicle. And when a control state changes by the selection, a control state is changed.
In this embodiment, when it is determined that the vehicle is following the preceding vehicle at a constant speed, inter-vehicle time control that follows a preset inter-vehicle time is selected as the control state of the host vehicle.
その車間時間制御を選択している状態で、先行車が加減速を行ったと判定した場合には、車間距離維持制御を選択して車間距離維持制御の制御状態に遷移すると判定する。
また、車間距離維持制御の制御状態が選択されている状態では、先行車と自車の走行状態に応じて車間時間制御を選択し、車間時間制御を選択した場合には再度車間時間制御モードへ遷移させる。
If it is determined that the preceding vehicle has accelerated or decelerated while the inter-vehicle time control is selected, it is determined that the inter-vehicle distance maintenance control is selected and the control state is shifted to the inter-vehicle distance maintenance control.
In addition, when the control state of the inter-vehicle distance maintenance control is selected, the inter-vehicle time control is selected according to the traveling state of the preceding vehicle and the host vehicle, and when the inter-vehicle time control is selected, the inter-vehicle time control mode is entered again. Transition.
本実施形態のステップS65では、ステップS39にて車間距離維持制御作動フラグが「1」に設定されている場合には、制御状態を車間距離維持制御モードを選択し、現在の制御状態が車間時間制御モードの場合には、制御状態を車間距離維持制御モードへ遷移させる。また、車間距離維持制御作動フラグが「1」に設定されていない場合には、制御状態として車間時間制御モードを選択する。 In step S65 of the present embodiment, if the inter-vehicle distance maintenance control operation flag is set to “1” in step S39, the inter-vehicle distance maintenance control mode is selected as the control state, and the current control state is the inter-vehicle time. In the case of the control mode, the control state is shifted to the inter-vehicle distance maintenance control mode. If the inter-vehicle distance maintenance control operation flag is not set to “1”, the inter-vehicle time control mode is selected as the control state.
また、ステップS65では、車間距離維持制御モード中(車間距離維持制御作動フラグ=「1」)に、「車間距離制御指令値≦車間時間制御指令値」となったと判定すると、車間距離維持制御作動フラグを「0」に設定して車間時間制御モードする。そして、制御状態を車間時間制御へ遷移させる。これによって、目標車間時間を達成させるための制御指令値が、各制御装置へ出力される。ここで、車間距離制御指令値は、ステップS36で算出したブレーキ液圧指令値である。車間時間制御指令値は、ステップS70で求めたブレーキ液圧指令値である。この車間距離制御指令値及び車間時間制御指令値は、例えば前回値を使用する。 In Step S65, if it is determined that “the inter-vehicle distance control command value ≦ the inter-vehicle time control command value” during the inter-vehicle distance maintenance control mode (the inter-vehicle distance maintenance control operation flag = “1”), the inter-vehicle distance maintenance control operation is performed. The flag is set to “0” and the inter-vehicle time control mode is set. Then, the control state is shifted to inter-vehicle time control. As a result, a control command value for achieving the target inter-vehicle time is output to each control device. Here, the inter-vehicle distance control command value is the brake fluid pressure command value calculated in step S36. The inter-vehicle time control command value is the brake fluid pressure command value obtained in step S70. As the inter-vehicle distance control command value and the inter-vehicle time control command value, for example, the previous values are used.
ステップS70では、トルク配分制御を算出する。具体的には、ステップS60で算出した目標車速指令値Vtargetを実現するための、エンジントルク指令値と、ブレーキ液圧指令値に配分する。
例えば、加速度もしくは、車速からATギア比などを含めたホイル端トルク指令値を求め、その後、ホイル端トルク指令値からエンジントルク指令値を求める。その後、ホイル端トルクから算出したエンジントルク指令値から、エンジンブレーキ+走行抵抗分を差し引いた分をブレーキ液圧指令値とする。
In step S70, torque distribution control is calculated. Specifically, the engine speed command value and the brake fluid pressure command value for realizing the target vehicle speed command value Vtarget calculated in step S60 are distributed.
For example, a wheel end torque command value including the AT gear ratio and the like is obtained from acceleration or vehicle speed, and then an engine torque command value is obtained from the wheel end torque command value. Thereafter, the brake hydraulic pressure command value is obtained by subtracting the engine brake + running resistance from the engine torque command value calculated from the wheel end torque.
ステップS80では、エンジン制御作動判断を行う。具体的には、ステップS70で算出されたエンジントルク指令値が予め設定した所定値以下となった場合に、エンジン制御作動フラグfengを「1」に設定して、エンジントルク指令値を出力する。
ステップS85では、車間距離維持制御作動フラグが「1」と判定した場合には、ステップS36で算出した第2目標加減速度指令であるブレーキ液圧指令値を、最終的なブレーキ液圧指令値として出力する。なお、この場合には、エンジントルク指令値を「0」に設定しても良い。
In step S80, engine control operation determination is performed. Specifically, when the engine torque command value calculated in step S70 is equal to or less than a predetermined value set in advance, the engine control operation flag feng is set to “1” and the engine torque command value is output.
In step S85, when it is determined that the inter-vehicle distance maintenance control operation flag is “1”, the brake fluid pressure command value, which is the second target acceleration / deceleration command calculated in step S36, is used as the final brake fluid pressure command value. Output. In this case, the engine torque command value may be set to “0”.
ステップS90では、ブレーキ制御作動判断を行う。具体的には、ステップS70で算出されたブレーキ液圧指令値が予め設定した所定値以上となった場合に、ブレーキ制御作動フラグfbrを「1」に設定して、ブレーキ液圧指令値を出力する。なお、ステップS36で算出したブレーキ液圧指令値は、予め設定した所定値以上の値である。
ステップS100では、上記ステップS80、S9で算出された各制御量を加減速制御装置に出力する。
In step S90, a brake control operation determination is performed. Specifically, when the brake fluid pressure command value calculated in step S70 is equal to or greater than a predetermined value set in advance, the brake control operation flag fbr is set to “1” and the brake fluid pressure command value is output. To do. Note that the brake fluid pressure command value calculated in step S36 is a value equal to or greater than a predetermined value set in advance.
In step S100, the control amounts calculated in steps S80 and S9 are output to the acceleration / deceleration control device.
(動作その他)
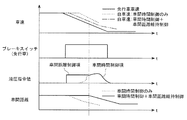
先行車が一定速度で走行し、自車も一定速度で追従走行している場合には、目標車間時間となる第1目標加減速度指令値に基づき自車の加減速度が制御されている。
この状態で、通信によって先行車の制動開始(第1走行状態変化)を検出すると、図5に示すように、車間距離維持制御モードとなって制動が早期に開始する。すなわち、図5に示すように、先行車が制動すると、車間距離が短くなるが、本実施形態では、先行車の制動開始に応じて自車も制動を開始することで、車間距離が維持される。
(Operation other)
When the preceding vehicle travels at a constant speed and the host vehicle also follows the vehicle at a constant speed, the acceleration / deceleration of the host vehicle is controlled based on the first target acceleration / deceleration command value that is the target inter-vehicle time.
In this state, when the start of braking of the preceding vehicle (change in the first traveling state) is detected by communication, as shown in FIG. 5, the inter-vehicle distance maintaining control mode is entered and braking is started early. That is, as shown in FIG. 5, when the preceding vehicle brakes, the inter-vehicle distance decreases, but in this embodiment, the own vehicle also starts braking in response to the start of braking of the preceding vehicle, thereby maintaining the inter-vehicle distance. The
更に、車間距離維持制御モード中に、「車間距離制御指令値(第2目標加減速度指令値)≦車間時間制御指令値(第1目標加減速度指令値)」となった場合(第2走行状態変化を検出した場合)には、車間時間制御へ制御状態が遷移して、目標車間時間を達成させるための制御指令値が、各制御装置へ出力する。
このように、先行車のブレーキスイッチを検出するなど先行車の制動開始(第1走行状態変化)を検出すると、予め設定した減速度を発生させることで、先行車が減速を開始する直前の車間距離を維持させることが可能となる。
Further, when “inter-vehicle distance control command value (second target acceleration / deceleration command value) ≦ inter-vehicle time control command value (first target acceleration / deceleration command value)” during the inter-vehicle distance maintenance control mode (second running state) When a change is detected), the control state transits to inter-vehicle time control, and a control command value for achieving the target inter-vehicle time is output to each control device.
As described above, when the brake start of the preceding vehicle (such as a change in the first running state) is detected, such as detecting the brake switch of the preceding vehicle, the vehicle immediately before the preceding vehicle starts decelerating by generating a preset deceleration. The distance can be maintained.
またこの車間維持制御は、車間時間制御と比較して制御作動タイミングが早くなるので、先行車減速に対する制御応答性を向上させることが出来る。この結果、車間が詰まることに起因下、自車の運転者がブレーキを踏むことを減らすことに繋がる。このことは、車群を維持する状態をより長くすることに繋がる。
また、より減速度変化が少なくなるため、車群の安定性も向上させることができる。
In addition, since the inter-vehicle maintenance control has earlier control operation timing than the inter-vehicle time control, the control responsiveness to the preceding vehicle deceleration can be improved. As a result, it is possible to reduce the driver of the own vehicle from stepping on the brakes due to clogging between the vehicles. This leads to a longer state of maintaining the vehicle group.
In addition, since the deceleration change is further reduced, the stability of the vehicle group can be improved.
また、車間時間制御だけの走行制御では、無駄時間や、推定誤差などが要因となり、作動タイミングが遅くなるシーンがあり、先行車は緩減速しているのに対して、急減速となる可能性があった。このことは、隊列走行において、後続車へのショックウェーブを伝播させる傾向を生じる原因となっていた。これに対し、本実施形態では、制動の作動タイミングを早めることが出来るので、制御量を小さく抑えることが可能となる。この結果、目標値への追従性が向上すると共に、後続車へのショックウェーブの伝播を低減させることが可能となる。 In addition, in travel control with only inter-vehicle time control, there is a scene where the operation timing is delayed due to dead time, estimation error, etc. was there. This was the cause of the tendency to propagate the shock wave to the following vehicle in the platooning. On the other hand, in the present embodiment, since the braking operation timing can be advanced, the control amount can be kept small. As a result, the followability to the target value is improved, and the propagation of the shock wave to the following vehicle can be reduced.
ここで、上記実施形態では、車間距離維持制御モード中に、「車間距離制御指令値≦車間時間制御指令値」となった場合には、車間時間制御へ制御状態が遷移するとしている。車間時間制御モード中に、車間距離維持制御作動フラグが「1」に設定されても、「車間距離制御指令値≦車間時間制御指令値」の場合には、車間距離維持制御モードへの遷移(車間距離維持制御の選択)を行うことなく、車間距離維持制御作動フラグを「0」に再設定しても良い。 Here, in the above-described embodiment, when “inter-vehicle distance control command value ≦ inter-vehicle time control command value” is satisfied during the inter-vehicle distance maintenance control mode, the control state transitions to inter-vehicle time control. Even if the inter-vehicle distance maintenance control operation flag is set to “1” during the inter-vehicle time control mode, if “inter-vehicle distance control command value ≦ inter-vehicle time control command value”, the transition to the inter-vehicle distance maintenance control mode ( The inter-vehicle distance maintaining control operation flag may be reset to “0” without performing inter-vehicle distance maintaining control).
(変形例)
上記ステップS36では、先行車の減速開始を検出した場合には予め設定した制駆動力指令値を車間距離制御指令値として算出(設定)している。その予め設定した制駆動力指令値を車間距離制御指令値として算出した後には、先行車の減速度に応じた値に、ブレーキ液圧指令値を算出しても良い。例えば、先行車減速度に予め設定したゲインを掛けたものをブレーキ液圧指令値とする。
(Modification)
In step S36, when the start of deceleration of the preceding vehicle is detected, a preset braking / driving force command value is calculated (set) as the inter-vehicle distance control command value. After the preset braking / driving force command value is calculated as the inter-vehicle distance control command value, the brake fluid pressure command value may be calculated to a value corresponding to the deceleration of the preceding vehicle. For example, the brake fluid pressure command value is obtained by multiplying the preceding vehicle deceleration by a preset gain.
次に、この場合の動作その他を説明する。
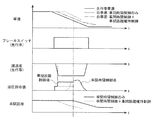
ここでは、図6に示すように、一定速度で先行車に追従中に先行車が減速した場合を想定する。このとき、先行車のブレーキ操作(ブレーキスイッチ)を検出すると、追従時の車間距離を維持させるため、予め設定した減速度となるブレーキ液圧指令値を出力する。
その後、先行車の減速度に応じてブレーキ液圧指令値を補正若しくは更新する。
その後、車間距離維持指令値 ≦ 車間時間制御指令値となった場合に、車間時間制御へ遷移させる。
Next, the operation and others in this case will be described.
Here, as shown in FIG. 6, it is assumed that the preceding vehicle decelerates while following the preceding vehicle at a constant speed. At this time, when a brake operation (brake switch) of the preceding vehicle is detected, a brake fluid pressure command value that is a preset deceleration is output in order to maintain the inter-vehicle distance during tracking.
Thereafter, the brake fluid pressure command value is corrected or updated according to the deceleration of the preceding vehicle.
Thereafter, when the inter-vehicle distance maintenance command value ≦ the inter-vehicle time control command value, the transition to the inter-vehicle time control is performed.
この場合には、先行車の減速度に応じて、制御量を補正することで、先行車が急減速を行ったときに、後続車の追突する可能性を低減させることが可能となる。
また、先行車の減速度を用いているので、車間距離の維持が容易となる。
ここで、車輪速センサ2は走行状態検出部を構成する。外界認識装置3は先行車検出部を構成する。ステップS30は目標車間時間設定部を構成する。ステップS40〜ステップS70は第1目標加減速度算出部を構成する。ステップS36は目標車間距離設定部を構成する。ステップS36は第2目標加減速度算出部、ステップS65、ステップS85は制御状態選択部を構成する。エンジンコントローラ及びブレーキコントローラは制駆動制御部を構成する。通信装置4は自車周囲車両走行状態検出部を構成する。
In this case, by correcting the control amount in accordance with the deceleration of the preceding vehicle, it is possible to reduce the possibility that the following vehicle will collide when the preceding vehicle suddenly decelerates.
In addition, since the deceleration of the preceding vehicle is used, it is easy to maintain the inter-vehicle distance.
Here, the
(本実施形態の効果)
次に、本実施形態の効果を説明する。
(1)走行制御コントローラ5は、先行車と自車との間の相対値である車間相対値を検出する。走行制御コントローラ5は、目標車間時間を設定する。走行制御コントローラ5は、自車の走行状態及び上記車間相対値に基づき、上記目標車間時間とするための第1目標加減速度指令値を算出する。走行制御コントローラ5は、目標車間距離を設定する。走行制御コントローラ5は、上記設定した目標車間距離を達成するための第2目標加減速度指令値を算出する。走行制御コントローラ5は、先行車及び自車の少なくとも一方の走行状態に基づき第1目標加減速度指令値若しくは第2目標加減速度指令値を選択する。走行制御コントローラ5は、上記選択された目標加減速度指令値で自車の駆動装置及び制動装置の少なくとも一方を制御する。
(Effect of this embodiment)
Next, the effect of this embodiment will be described.
(1) The
この構成によって、自車の走行状態及び自車周囲の他車両の走行状態の少なくとも一方の走行状態に応じて、目標車間時間による制御と目標車間距離による制御との切り換えを実施する。これによって、先行車への追従の状態に応じた制御を選択可能となる。この結果、より適切なタイミングで加減速を発生可能とすることも可能となる。 With this configuration, switching between the control based on the target inter-vehicle time and the control based on the target inter-vehicle distance is performed in accordance with at least one of the travel state of the host vehicle and the travel state of other vehicles around the host vehicle. As a result, it is possible to select control according to the state of following the preceding vehicle. As a result, acceleration / deceleration can be generated at a more appropriate timing.
ここで、目標車間距離維持制御は、目標車間時間制御と比較し、制御作動タイミングが早くなる。このことから、例えば制御作動タイミングを早めたい状態と判定したときに、目標車間距離維持制御を実施するように選択する。これによると、短い車間での隊列走行を実現する場合でも、先行車の減速に対する運転者への違和感が減少するとともに、運転者のブレーキキャンセルが減り、車群の維持が可能となる。さらに減速度の変化を小さくすることができるので、目標車速に対するオーバーシュート量が低減し、目標値を維持することが可能となる。 Here, the target inter-vehicle distance maintenance control is earlier in control operation timing than the target inter-vehicle time control. From this, for example, when it is determined that the control operation timing is desired to be advanced, the target inter-vehicle distance maintenance control is selected. According to this, even when platooning between short vehicles is realized, the driver feels uncomfortable with the deceleration of the preceding vehicle, and the driver's brake cancellation is reduced, so that the vehicle group can be maintained. Furthermore, since the change in deceleration can be reduced, the amount of overshoot with respect to the target vehicle speed can be reduced, and the target value can be maintained.
(2)通信装置4によって自車両周囲の他車両の走行状態を検出する。走行制御コントローラ5は、通信装置4が検出した自車両周囲の他車両の車両走行状態に基づき、第2目標加減速度指令値を算出する。通信装置4が検出した自車両周囲の他車両の車両走行状態は、例えば先行車の走行状態とする。
この構成によれば、自車両周囲の他車両の走行状態に応じた、第2目標加減速度指令値で車間距離維持制御が可能となる。
(2) The traveling state of other vehicles around the host vehicle is detected by the communication device 4. The
According to this configuration, the inter-vehicle distance maintenance control can be performed with the second target acceleration / deceleration command value according to the traveling state of the other vehicle around the host vehicle.
(3)通信装置4によって自車両周囲の他車両の走行状態を検出する。走行制御コントローラ5は、自車の走行状態、先行車の走行状態、及び通信装置4が検出する他車両の走行状態の少なくとも一つの走行状態に基づき、目標加減速度指令値の選択を実施する。
この構成によれば、自車の走行状態、先行車の走行状態、及び通信装置4が検出する他車両の走行状態の少なくとも一つの走行状態に合わせて、車間時間制御と車間距離維持制御との選択が可能となる。
(3) The communication device 4 detects the running state of other vehicles around the host vehicle. The
According to this configuration, the inter-vehicle time control and the inter-vehicle distance maintenance control are performed in accordance with at least one of the traveling state of the own vehicle, the traveling state of the preceding vehicle, and the traveling state of the other vehicle detected by the communication device 4. Selection becomes possible.
(4)走行制御コントローラ5は、先行車に対して自車両の速度が一定速度で追従していると判定すると第1目標加減速度指令値を選択し、その第1目標加減速度指令値を選択している状態で、先行車の走行状態が予め設定した第1走行状態変化に変化したことを検出すると、第1目標加減速度指令値から第2目標加減速度指令値に選択を遷移させる。
この構成によれば、安定して先行車に追従している場合には、車間時間制御を採用し、走行状態の変化に応じて適宜車間距離維持制御に移行することが可能となる。
(4) When the traveling
According to this configuration, when the vehicle is following the preceding vehicle stably, it is possible to employ inter-vehicle time control and appropriately shift to inter-vehicle distance maintenance control according to changes in the running state.
(5)走行制御コントローラ5は、第1目標加減速度指令値から第2目標加減速度指令値に選択を遷移させた後に、更に先行車の走行状態が予め設定した第2走行検出状態に変化したことを検出すると、その走行状態の変化に応じて、第2目標加減速度指令値から第1目標加減速度指令値に選択を遷移させる。
この構成によれば、一旦車間距離維持制御に繊維しても、車間時間制御に復帰することが可能となる。
(6)走行制御コントローラ5は、先行車追従時の自車の車速に応じて、目標加減速度指令値の遷移を判断する。
この構成によれば、追従状態を示す自車速に応じて制御状態の遷移を行うことが出来る。
(5) After the transition of the selection from the first target acceleration / deceleration command value to the second target acceleration / deceleration command value, the traveling
According to this configuration, it is possible to return to the inter-vehicle time control even if the inter-vehicle distance maintenance control is performed once.
(6) The
According to this configuration, the control state can be changed according to the vehicle speed indicating the following state.
(7)走行制御コントローラ5は、予め設定した1以上の車速閾値と上記先行車追従時の自車の車速との関係に基づき、上記目標加減速度指令値の遷移を判断する。
この構成によれば、追従状態を示す自車速に応じて段階的に制御状態の遷移を行うことが出来る。
(8)走行制御コントローラ5は、先行車の制動開始を第1走行状態変化として検出する。
この構成によれば、先行車の制動開始によって車間距離が小さくなると判定されると車間距離維持制御に移行して、早いタイミングで制御を開始することが可能となる。
(7) The
According to this configuration, the control state can be changed stepwise in accordance with the own vehicle speed indicating the following state.
(8) The
According to this configuration, when it is determined that the inter-vehicle distance is reduced by the start of braking of the preceding vehicle, it is possible to shift to the inter-vehicle distance maintenance control and to start the control at an early timing.
(9)走行制御コントローラ5は、先行車の制動開始を検出した場合に、予め設定した減速度を発生可能な制動指令値を第2目標加減速度指令値とする。
これによって、目標車間距離を達成するための制御指令値を発生可能となる。先行車の制動によって車間距離が短くなるため、制御指令値が制動を指令する指令値となっている。
(10)走行制御コントローラ5は、上記制動指令値を、先行車の減速度に応じて変更する。
これによって、先行車の状態に応じた、より適切な制御指令値を発生可能となる。
(9) When detecting the start of braking of the preceding vehicle, the traveling
As a result, a control command value for achieving the target inter-vehicle distance can be generated. Since the inter-vehicle distance is shortened by braking of the preceding vehicle, the control command value is a command value for commanding braking.
(10) The
This makes it possible to generate a more appropriate control command value according to the state of the preceding vehicle.
(11)走行制御コントローラ5は、第2目標加減速度指令値を選択している状態で、第2目標加減速度指令値よりも第1目標加減速度指令値の方が大きくなったと判定すると、第2目標加減速度指令値から第1目標加減速度指令値に遷移する。
この構成によって、車間時間制御による加減速度と車間距離維持制御による加減速度が同等な状態で車間時間制御に復帰することが可能となる。
(12)走行制御コントローラ5は、第1目標加減速度指令値から第2目標加減速度指令値に目標加減速度指令値が遷移する際の実車間距離を目標車間距離に設定する。
これによって、車間時間制御から車間距離維持制御に遷移したときの車間距離を維持可能となる。
(11) When the traveling
With this configuration, it is possible to return to the inter-vehicle time control in a state where the acceleration / deceleration by the inter-vehicle time control and the acceleration / deceleration by the inter-vehicle distance maintenance control are equal.
(12) The
This makes it possible to maintain the inter-vehicle distance when transitioning from inter-vehicle time control to inter-vehicle distance maintenance control.
(13)走行制御コントローラ5は、先行車に追従するために、予め設定した目標車間時間とするための第1目標加減速度指令値を算出し、第1目標加減速度指令値を目標加減速度指令値で自車の駆動装置及び制動装置の少なくとも一方を制御する。また走行制御コントローラ5は、目標車間距離を設定する。走行制御コントローラ5は、先行車の減速開始を検出すると、上記目標加減速度指令値として、第1目標加減速度指令値から、上記目標車間距離を達成するための第2目標加減速度指令値に遷移させる。
この構成によれば、先行車が船側を開始する際には、制御開始タイミングが相対的に早い車間距離維持制御に遷移する。この結果、より適切なタイミングで制御を開始することが出来る。
(13) The
According to this configuration, when the preceding vehicle starts on the ship side, the control shifts to the inter-vehicle distance maintenance control with relatively early control start timing. As a result, control can be started at a more appropriate timing.
「第2実施形態」
次に、第2実施形態について図面を参照しつつ説明する。なお上記第1実施形態と同様な構成については同一の符号を付して説明する。
本実施形態の基本的構成は、上記第1実施形態と同様である。
本実施形態の走行制御コントローラの処理は、図7に示すように、基本的に上記第1実施形態の処理(図4)と同様である。但し、ステップS36,ステップS65の処理が異なる。またステップS85の処理が無い。
“Second Embodiment”
Next, a second embodiment will be described with reference to the drawings. In addition, the same code | symbol is attached | subjected and demonstrated about the structure similar to the said 1st Embodiment.
The basic configuration of the present embodiment is the same as that of the first embodiment.
As shown in FIG. 7, the process of the travel controller of the present embodiment is basically the same as the process of the first embodiment (FIG. 4). However, the processes of step S36 and step S65 are different. There is no processing in step S85.
次に、本実施形態における、ステップS36、ステップS65の処理について説明する。
ステップS36では、車間距離を維持させるための制御指令値を算出する。すなわち、ステップS36では、車間距離維持制御モードの選択(遷移)を検出するトリガとなる、先行車の減速開始を検出したら、予め設定されている車間距離を目標車間距離として設定する。そして、上記設定した車間距離を維持するための制御指令値を算出する。本実施形態では、例えば、制御指令値として目標車速指令値を算出する。目標車間距離の設定は、自車速に応じた値としても良い。例えば自車速が大きいほど目標車間距離を大きく設定する。
Next, the process of step S36 and step S65 in this embodiment is demonstrated.
In step S36, a control command value for maintaining the inter-vehicle distance is calculated. That is, in step S36, when the start of deceleration of the preceding vehicle, which serves as a trigger for detecting selection (transition) of the inter-vehicle distance maintenance control mode, is detected, the preset inter-vehicle distance is set as the target inter-vehicle distance. Then, a control command value for maintaining the set inter-vehicle distance is calculated. In the present embodiment, for example, a target vehicle speed command value is calculated as the control command value. The setting of the target inter-vehicle distance may be a value corresponding to the own vehicle speed. For example, the target inter-vehicle distance is set larger as the host vehicle speed increases.
ここで、制御指令値となる、目標車速指令値は、例えば、自車速、車間距離偏差と、相対速度偏差に、それぞれフィードバックゲインをかけたものをとする。例えばステップS40の処理と同様な処理によって、車間維持制御の制御指令値としての目標車速指令値を求める。
ステップS65では、ステップS39にて車間距離維持制御作動フラグが「1」に設定されている場合には、制御状態を車間距離維持制御モードを選択し、現在の制御状態が車間時間制御モードの場合には、制御状態を車間距離維持制御モードへ遷移させる。また、車間距離維持制御作動フラグが「1」に設定されていない場合には、制御状態として車間時間制御モードを選択する。
Here, the target vehicle speed command value serving as the control command value is obtained by multiplying the own vehicle speed, the inter-vehicle distance deviation, and the relative speed deviation by a feedback gain, for example. For example, a target vehicle speed command value as a control command value for the inter-vehicle maintenance control is obtained by a process similar to the process of step S40.
In step S65, if the inter-vehicle distance maintenance control operation flag is set to “1” in step S39, the inter-vehicle distance maintenance control mode is selected as the control state, and the current control state is the inter-vehicle time control mode. First, the control state is shifted to the inter-vehicle distance maintenance control mode. If the inter-vehicle distance maintenance control operation flag is not set to “1”, the inter-vehicle time control mode is selected as the control state.
また、ステップS65では、実際の車間時間が目標車間時間を越えたと判定(第2走行状態変化を検出)すると、車間距離維持制御作動フラグを「0」に設定して車間時間制御モードする。そして、制御状態を車間時間制御へ遷移させる。
そして、車間距離維持制御作動フラグが「1」の場合には、ステップS36で算出した制御指令値としての目標車速指令値を選択する。一方、車間距離維持制御作動フラグが「1」で無い場合には、ステップS60で算出した目標車速指令値を選択する。
そして、ステップS65で選択した目標車速指令値を、ステップS70で使用する。
In step S65, if it is determined that the actual inter-vehicle time has exceeded the target inter-vehicle time (the second running state change is detected), the inter-vehicle distance maintenance control operation flag is set to “0” and the inter-vehicle time control mode is set. Then, the control state is shifted to inter-vehicle time control.
If the inter-vehicle distance maintenance control operation flag is “1”, the target vehicle speed command value as the control command value calculated in step S36 is selected. On the other hand, if the inter-vehicle distance maintenance control operation flag is not “1”, the target vehicle speed command value calculated in step S60 is selected.
Then, the target vehicle speed command value selected in step S65 is used in step S70.
(動作その他)
例えば、図8に示すように、先行車のブレーキスイッチを検出した場合に、目標車間維持制御モードのための制御状態遷移用の目標車間時間を設定する。ここではブレーキスイッチを検出している例を示しているが、先行車の減速開始を検出できれば良い。
具体的には、ある所定の目標車間時間とする。車速などに応じて設定値は可変にしても良い。
(Operation other)
For example, as shown in FIG. 8, when a brake switch of a preceding vehicle is detected, a target inter-vehicle time for control state transition for the target inter-vehicle maintenance control mode is set. Although an example in which the brake switch is detected is shown here, it is only necessary to detect the start of deceleration of the preceding vehicle.
Specifically, a predetermined target inter-vehicle time is set. The set value may be variable according to the vehicle speed or the like.
そして、車間距離維持制御中には、設定された目標車間距離を維持するように制御される。更に、この車間距離維持制御中に、実車間時間が上記設定した目標車間時間を超えた場合には、車間時間制御へ制御状態を遷移させる。
このように、目標車間時間によって車間距離維持制御から車間時間制御への遷移が実施される。この結果、車間距離維持制御から、車間時間制御へ制御状態が遷移するときの制御指令値の変動を小さく抑えることができる。このため、車群の安定性を向上させることができる。
During the inter-vehicle distance maintenance control, control is performed so as to maintain the set target inter-vehicle distance. Further, during the inter-vehicle distance maintenance control, when the actual inter-vehicle time exceeds the set target inter-vehicle time, the control state is shifted to the inter-vehicle time control.
In this manner, the transition from the inter-vehicle distance maintenance control to the inter-vehicle time control is performed according to the target inter-vehicle time. As a result, it is possible to reduce the fluctuation of the control command value when the control state transitions from the inter-vehicle distance maintenance control to the inter-vehicle time control. For this reason, the stability of the vehicle group can be improved.
(変形例)
ここで、上記各実施形態では、車間距離維持制御モードから車間時間制御モードへの遷移(選択の切り替わり)の判定を、次のように判定している。
すなわち、第1実施形態では、車間時間制御の制御指令値が車間距離維持制御の制御指令値を越えた場合に、車間時間制御モードへ遷移すると判定している。また、第2実施形態では、実車間時間が目標車間時間を超えた場合に、車間時間制御モードへ遷移すると判定している。
車間時間制御モードへの遷移判定は、これらに限定されない。
次のようにして、車間時間制御モードへの遷移判定を実施しても良い。
(Modification)
Here, in each of the above embodiments, the determination of the transition (selection switching) from the inter-vehicle distance maintenance control mode to the inter-vehicle time control mode is determined as follows.
That is, in the first embodiment, when the control command value of the inter-vehicle time control exceeds the control command value of the inter-vehicle distance maintenance control, it is determined that the transition to the inter-vehicle time control mode is made. Further, in the second embodiment, when the actual inter-vehicle time exceeds the target inter-vehicle time, it is determined that the transition to the inter-vehicle time control mode is made.
The transition determination to the inter-vehicle time control mode is not limited to these.
The transition determination to the inter-vehicle time control mode may be performed as follows.
(変形例1)
車間距離離維持制御へ制御状態が遷移すると時間の計測を開始し、計測時間が予め設定した経過時間以上となった場合に、車間時間制御モードへ遷移すると判定しても良い。
この場合のタイムチャート例を図9に示す。
図9の例では、車間距離維持制御に遷移した後、車間距離維持制御での液圧指令値が、車間時間制御での液圧指令値より大きくても、予め設定した経過時間だけ、車間時間制御状態が継続すると、車間時間制御へ制御状態が遷移する。
(Modification 1)
When the control state transits to the inter-vehicle distance maintaining control, the time measurement is started, and when the measured time becomes equal to or longer than the preset elapsed time, it may be determined that the inter-vehicle time control mode is entered.
An example of a time chart in this case is shown in FIG.
In the example of FIG. 9, after the transition to the inter-vehicle distance maintenance control, even if the hydraulic pressure command value in the inter-vehicle distance maintenance control is larger than the hydraulic pressure command value in the inter-vehicle time control, the inter-vehicle time is set by the preset elapsed time. When the control state continues, the control state transitions to inter-vehicle time control.
(変形例2)
自車両が自立的に求める、つまり先行車車速・減速度推定部で算出する加減速度推定値と、通信によって得られる先行車の加減速度を比較する。そして、図10に示すように、加減速度推定値に基づき減速度が、通信で取得する減速度より大きくなった場合に、車間時間制御モードへの遷移と判定しても良い。
(Modification 2)
The acceleration / deceleration estimated value calculated by the own vehicle autonomously, that is, calculated by the preceding vehicle vehicle speed / deceleration estimating unit, is compared with the acceleration / deceleration of the preceding vehicle obtained by communication. And as shown in FIG. 10, when the deceleration becomes larger than the deceleration acquired by communication based on the estimated acceleration / deceleration value, it may be determined as the transition to the inter-vehicle time control mode.
(変形例3)
先行車に追従するときの自車の走行状態である自車速によって、車間時間制御モードへの遷移を判定しても良い。例えば、自車速が予め設定した車速以下と判定すると、車間時間制御モードへの遷移と判定する。又は先行車が予め設定した車速以下と判定すると、車間時間制御モードへの遷移と判定する。
ここで、一定速度で走行している先行車に追従する際は、予め設定された車間時間となる車間距離で追従することになる。この状態から、先行車が減速した場合を想定すると、減速中は車間距離を維持するための車間距離維持制御とし、その後先行車が一定速となった時に、予め設定した車速以下まで減速していると判断したときは、その車速帯で設定された車間時間となる車間距離となるように、車間時間制御へ遷移する。但し、先行車が予め設定した車速まで減速しなかった場合は、車間距離維持制御のまま継続させる。
(Modification 3)
The transition to the inter-vehicle time control mode may be determined based on the own vehicle speed that is the traveling state of the own vehicle when following the preceding vehicle. For example, when it is determined that the host vehicle speed is equal to or lower than a preset vehicle speed, it is determined that the vehicle speed is in the inter-vehicle time control mode. Alternatively, when it is determined that the preceding vehicle is not more than a preset vehicle speed, it is determined that the vehicle is in the inter-vehicle time control mode.
Here, when following a preceding vehicle traveling at a constant speed, the vehicle follows a vehicle distance that is a preset vehicle time. Assuming that the preceding vehicle decelerates from this state, the inter-vehicle distance maintenance control is performed to maintain the inter-vehicle distance during deceleration, and then the vehicle is decelerated to a preset vehicle speed or less when the preceding vehicle becomes a constant speed. When it is determined that the vehicle is in the inter-vehicle time, the transition is made to the inter-vehicle time control so that the inter-vehicle distance becomes the inter-vehicle time set in the vehicle speed zone. However, if the preceding vehicle has not decelerated to the preset vehicle speed, the vehicle is kept in the inter-vehicle distance maintenance control.
(変形例4)
先行車の加減速度に応じて、車間距離維持制御モードと車間時間制御モードの切り換えを行っても良い。
例えば、先行車の減速度が予め設定した減速度閾値よりも高い場合は、車間距離維持制御とし、先行車の減速度が予め設定した減速度閾値よりも低い場合は、車間時間制御とする。
ここで、上述の説明では、自車の走行状態及び先行車の走行状態の少なくとも一方の走行状態に応じて、車間距離維持制御と車間時間制御のいずれかを選択して遷移することで説明している。先行車以外の自車両周囲の他車両の走行状態に応じて、車間距離維持制御と車間時間制御との選択を判定しても良い。
(Modification 4)
Switching between the inter-vehicle distance maintenance control mode and the inter-vehicle time control mode may be performed according to the acceleration / deceleration of the preceding vehicle.
For example, when the deceleration of the preceding vehicle is higher than a preset deceleration threshold, the inter-vehicle distance maintenance control is performed, and when the deceleration of the preceding vehicle is lower than the preset deceleration threshold, the inter-vehicle time control is performed.
Here, in the above description, it is described by selecting and switching between the inter-vehicle distance maintenance control and the inter-vehicle time control according to at least one of the traveling state of the own vehicle and the traveling state of the preceding vehicle. ing. The selection between the inter-vehicle distance maintenance control and the inter-vehicle time control may be determined according to the traveling state of other vehicles around the host vehicle other than the preceding vehicle.
また上述の説明では、制御指令のうち、主として減速度制御指令値を、車間距離維持制御と車間時間制御で変更することを説明しているが。加速度制御指令値を主として変更するように設定しても良い。
また、走行制御コントローラ5は、第1実施形態の構成と第2実施形態の構成を適宜組み合わせて制御しても良い。
In the above description, the deceleration control command value of the control command is mainly changed by the inter-vehicle distance maintenance control and the inter-vehicle time control. The acceleration control command value may be set to be changed mainly.
Moreover, the traveling
ここで、車輪速センサ2は走行状態検出部を構成する。外界認識装置3は先行車検出部を構成する。ステップS30は目標車間時間設定部を構成する。ステップS40〜ステップS70は第1目標加減速度算出部を構成する。ステップS36は目標車間距離設定部を構成する。ステップS36は第2目標加減速度算出部を構成する。ステップS65、ステップS85は制御状態選択部を構成する。エンジンコントローラ及びブレーキコントローラは制駆動制御部を構成する。通信装置4は自車周囲車両走行状態検出部を構成する。
Here, the
(本実施形態の効果)
本実施形態は、第1実施形態での効果の他、次の効果を奏する。
(1)通信装置4は、自車両周囲の他車両の走行状態を検出する。走行制御コントローラ5は、自車の走行状態、先行車の走行状態、及び通信装置4が検出する他車両の走行状態の少なくとも一つの走行状態に基づき、目標加減速度指令値の選択を実施する。
この構成によれば、自車の走行状態、先行車の走行状態、及び通信装置4が検出する他車両の走行状態の少なくとも一つの走行状態に応じて、車間時間制御と車間距離維持制御の間の制御状態の遷移が可能となる。
(Effect of this embodiment)
This embodiment has the following effects in addition to the effects of the first embodiment.
(1) The communication device 4 detects the traveling state of other vehicles around the host vehicle. The
According to this configuration, between the inter-vehicle time control and the inter-vehicle distance maintenance control according to at least one of the traveling state of the host vehicle, the traveling state of the preceding vehicle, and the traveling state of the other vehicle detected by the communication device 4. The control state can be changed.
(2)走行制御コントローラ5は、第2目標加減速度指令値を選択している状態で、実車間時間が目標車間時間よりも大きくなると、第2目標加減速度指令値から第1目標加減速度指令値に遷移する。
この構成によれば、車間時間制御の目標車間時間となったとき車間時間制御に遷移する。この結果、制御状態の遷移による制動制御指令値の変動を小さくすることが出来る。
(2) The traveling
According to this structure, when it becomes the target inter-vehicle time of inter-vehicle time control, it changes to inter-vehicle time control. As a result, the fluctuation of the braking control command value due to the transition of the control state can be reduced.
1 制御作動用スイッチ
2 車輪速センサ
3 外界認識装置
4 通信装置
5 走行制御コントローラ
5A 制御状態設定部
5B 先行車検出状態判定部
5C 先行車車速・減速度推定部
5D 目標応答特性算出部
5E 目標車速算出部
5F 目標加減速度算出部
5G 車速指令値算出部
5I 制御状態遷移判断部
5J 車速サーボ演算部
5K トルク配分制御演算部
5L エンジントルク演算部
5M ブレーキ液圧演算部
5N 自車両周囲走行車両状態検出部
5P 車間距離制御指令値算出部
5Q 車間距離制御作動判断部
6 加減速制御装置
6A ブレーキコントローラ
6B エンジンコントローラ
10 ブレーキ装置
12 エンジン
13 車輪
DESCRIPTION OF SYMBOLS 1
Claims (14)
自車前方を走行する先行車を検出する先行車検出部と、
上記先行車検出部が検出した先行車と自車との間の相対値である車間相対値を検出する車間相対値検出部と、
目標車間時間を設定する目標車間時間設定部と、
上記走行状態検出部が検出した自車の走行状態及び上記車間相対値検出部が検出した車間相対値に基づき、上記目標車間時間とするための第1目標加減速度指令値を算出する第1目標加減速度算出部と、
目標車間距離を設定する目標車間距離設定部と、
上記目標車間距離設定部が設定した目標車間距離を達成するための第2目標加減速度指令値を算出する第2目標加減速度算出部と、
先行車及び自車の少なくとも一方の走行状態に基づき第1目標加減速度指令値若しくは第2目標加減速度指令値を選択する制御状態選択部と、
制御状態選択部で選択された目標加減速度指令値で自車の駆動装置及び制動装置の少なくとも一方を制御する制駆動制御部と、を備えることを特徴とする車両用走行制御装置。 A running state detector that detects the running state of the vehicle;
A preceding vehicle detector for detecting a preceding vehicle traveling in front of the host vehicle;
An inter-vehicle relative value detection unit that detects an inter-vehicle relative value that is a relative value between the preceding vehicle and the host vehicle detected by the preceding vehicle detection unit;
A target inter-vehicle time setting unit for setting a target inter-vehicle time;
A first target acceleration / deceleration command value for setting the target inter-vehicle time based on the travel state of the host vehicle detected by the travel state detection unit and the inter-vehicle relative value detected by the inter-vehicle relative value detection unit. An acceleration / deceleration calculator,
A target inter-vehicle distance setting unit for setting the target inter-vehicle distance;
A second target acceleration / deceleration calculation unit for calculating a second target acceleration / deceleration command value for achieving the target inter-vehicle distance set by the target inter-vehicle distance setting unit;
A control state selection unit that selects the first target acceleration / deceleration command value or the second target acceleration / deceleration command value based on the traveling state of at least one of the preceding vehicle and the host vehicle;
And a braking / driving control unit that controls at least one of the driving device and the braking device of the host vehicle with the target acceleration / deceleration command value selected by the control state selection unit.
上記第2目標加減速度指令値部は、自車周囲車両走行状態検出部が検出した自車両周囲の他車両の車両走行状態に基づき、第2目標加減速度指令値を算出することを特徴とする請求項1に記載した車両用走行制御装置。 A vehicle surrounding vehicle running state detection unit for detecting the running state of other vehicles around the host vehicle by communication means;
The second target acceleration / deceleration command value unit calculates a second target acceleration / deceleration command value based on a vehicle running state of another vehicle surrounding the host vehicle detected by the host vehicle surrounding vehicle running state detection unit. The vehicle travel control apparatus according to claim 1.
上記制御状態選択部は、自車の走行状態、先行車の走行状態、及び自車周囲車両走行状態検出部が検出する他車両の走行状態の少なくとも一つの走行状態に基づき、目標加減速度指令値の選択を実施することを特徴とする請求項1又は請求項2に記載した車両用走行制御装置。 A vehicle surrounding vehicle running state detection unit for detecting the running state of other vehicles around the host vehicle by communication means;
The control state selection unit is a target acceleration / deceleration command value based on at least one of the traveling state of the host vehicle, the traveling state of the preceding vehicle, and the traveling state of the other vehicle detected by the surrounding vehicle traveling state detection unit. The vehicle travel control device according to claim 1 or 2, wherein the selection is performed.
目標車間距離を設定する目標車間距離設定部を備え、
他車両の減速開始を検出すると、上記目標加減速度指令値として、第1目標加減速度指令値から、上記目標車間距離を達成するための第2目標加減速度指令値に遷移させることを特徴とする車両用走行制御装置。 In order to follow the preceding vehicle, a first target acceleration / deceleration command value for setting a preset target inter-vehicle time is calculated, and the first target acceleration / deceleration command value is used as the target acceleration / deceleration command value. In the vehicular travel control device for controlling at least one of the devices,
It has a target inter-vehicle distance setting unit that sets the target inter-vehicle distance,
When the start of deceleration of another vehicle is detected, the target acceleration / deceleration command value is changed from the first target acceleration / deceleration command value to the second target acceleration / deceleration command value for achieving the target inter-vehicle distance. Vehicle travel control device.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011111743A JP2012240532A (en) | 2011-05-18 | 2011-05-18 | Travel control device for vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011111743A JP2012240532A (en) | 2011-05-18 | 2011-05-18 | Travel control device for vehicle |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012240532A true JP2012240532A (en) | 2012-12-10 |
Family
ID=47462680
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011111743A Withdrawn JP2012240532A (en) | 2011-05-18 | 2011-05-18 | Travel control device for vehicle |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012240532A (en) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015022422A (en) * | 2013-07-17 | 2015-02-02 | 日産自動車株式会社 | Platoon control apparatus and platoon control method |
| WO2020174920A1 (en) * | 2019-02-25 | 2020-09-03 | 日立オートモティブシステムズ株式会社 | Vehicle control device, vehicle control method and vehicle control system |
| JP2021024338A (en) * | 2019-07-31 | 2021-02-22 | ダイハツ工業株式会社 | Following travel control device |
-
2011
- 2011-05-18 JP JP2011111743A patent/JP2012240532A/en not_active Withdrawn
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015022422A (en) * | 2013-07-17 | 2015-02-02 | 日産自動車株式会社 | Platoon control apparatus and platoon control method |
| WO2020174920A1 (en) * | 2019-02-25 | 2020-09-03 | 日立オートモティブシステムズ株式会社 | Vehicle control device, vehicle control method and vehicle control system |
| JPWO2020174920A1 (en) * | 2019-02-25 | 2021-09-30 | 日立Astemo株式会社 | Vehicle control device, vehicle control method and vehicle control system |
| JP7204873B2 (en) | 2019-02-25 | 2023-01-16 | 日立Astemo株式会社 | VEHICLE CONTROL DEVICE, VEHICLE CONTROL METHOD AND VEHICLE CONTROL SYSTEM |
| US12036989B2 (en) | 2019-02-25 | 2024-07-16 | Hitachi Astemo, Ltd. | Vehicle control device, vehicle control method, and vehicle control system |
| JP2021024338A (en) * | 2019-07-31 | 2021-02-22 | ダイハツ工業株式会社 | Following travel control device |
| JP7086487B2 (en) | 2019-07-31 | 2022-06-20 | ダイハツ工業株式会社 | Follow-up driving control device |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6226896B2 (en) | A method for minimizing brake intervention based on collision certainty | |
| EP3530535B1 (en) | Vehicle movement control device, vehicle movement control method, and vehicle movement control program | |
| JP6221445B2 (en) | Vehicle travel control device | |
| KR101376209B1 (en) | Control System and Method for Stopping Vehicle | |
| EP2902278B1 (en) | Method for reducing jerk when completing an automatic braking maneuver | |
| WO2018230286A1 (en) | Vehicle motion control device, vehicle motion control method, and vehicle motion control system | |
| US20160016469A1 (en) | Vehicle travel control apparatus | |
| US11691621B2 (en) | Driving support apparatus including collision avoidance braking control | |
| KR101693847B1 (en) | Adaptive cruise control system and control method thereof | |
| CN110654377A (en) | Vehicle anti-collision control method and control system | |
| CN107004365B (en) | Predicted route estimation device and predicted route estimation method | |
| WO2006101261A1 (en) | Running control device for vehicle | |
| WO2013098996A1 (en) | Vehicle driving assistance device | |
| JP6265191B2 (en) | Vehicle control device | |
| CN113748057B (en) | Method and device for automatic scram | |
| JP2004355324A (en) | Contact avoidance control device for vehicle | |
| KR20190057475A (en) | Method and apparatus for controlling autonomous vehicle | |
| JP2006264571A (en) | Following stop control unit and method of controlling following stop | |
| JP6543015B2 (en) | Vehicle travel control device | |
| JP5377026B2 (en) | Follow-up control device | |
| JP2012240532A (en) | Travel control device for vehicle | |
| JP5549472B2 (en) | Vehicle control device | |
| JP2004114906A (en) | Follow-up drive control device | |
| EP3048024B1 (en) | Method and apparatus for adaptive cruise control in a road vehicle | |
| KR101146520B1 (en) | system and the method of generating reference speed for automatic driving vehicle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20140805 |