JP2012194165A - 走査型顕微光散乱測定解析装置および光散乱解析方法 - Google Patents
走査型顕微光散乱測定解析装置および光散乱解析方法 Download PDFInfo
- Publication number
- JP2012194165A JP2012194165A JP2011083131A JP2011083131A JP2012194165A JP 2012194165 A JP2012194165 A JP 2012194165A JP 2011083131 A JP2011083131 A JP 2011083131A JP 2011083131 A JP2011083131 A JP 2011083131A JP 2012194165 A JP2012194165 A JP 2012194165A
- Authority
- JP
- Japan
- Prior art keywords
- relaxation
- data
- time
- sample
- correlation function
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000149 argon plasma sintering Methods 0.000 title claims abstract description 88
- 238000005259 measurement Methods 0.000 title claims abstract description 82
- 238000004458 analytical method Methods 0.000 title claims abstract description 59
- 238000005314 correlation function Methods 0.000 claims abstract description 47
- 230000002159 abnormal effect Effects 0.000 claims abstract description 17
- 230000003287 optical effect Effects 0.000 claims description 49
- 238000004364 calculation method Methods 0.000 claims description 27
- 238000001514 detection method Methods 0.000 claims description 27
- 238000009792 diffusion process Methods 0.000 claims description 27
- 238000000034 method Methods 0.000 claims description 26
- 238000009826 distribution Methods 0.000 claims description 20
- 230000000116 mitigating effect Effects 0.000 claims description 17
- 230000007423 decrease Effects 0.000 claims description 5
- 230000001419 dependent effect Effects 0.000 claims description 5
- 230000009191 jumping Effects 0.000 claims description 3
- 230000002093 peripheral effect Effects 0.000 claims description 3
- 239000000523 sample Substances 0.000 description 112
- 239000000499 gel Substances 0.000 description 33
- 238000012545 processing Methods 0.000 description 16
- 238000002296 dynamic light scattering Methods 0.000 description 8
- 239000000463 material Substances 0.000 description 6
- 229920000642 polymer Polymers 0.000 description 6
- 239000000243 solution Substances 0.000 description 6
- 238000004132 cross linking Methods 0.000 description 5
- 238000010586 diagram Methods 0.000 description 4
- 238000003384 imaging method Methods 0.000 description 4
- 238000003860 storage Methods 0.000 description 4
- 238000012935 Averaging Methods 0.000 description 3
- 239000012472 biological sample Substances 0.000 description 3
- 210000004027 cell Anatomy 0.000 description 3
- 238000005315 distribution function Methods 0.000 description 3
- 239000003814 drug Substances 0.000 description 3
- 239000002245 particle Substances 0.000 description 3
- 230000005856 abnormality Effects 0.000 description 2
- 238000005311 autocorrelation function Methods 0.000 description 2
- 239000000084 colloidal system Substances 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 2
- 230000001066 destructive effect Effects 0.000 description 2
- 239000011521 glass Substances 0.000 description 2
- 239000004973 liquid crystal related substance Substances 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 229910052751 metal Inorganic materials 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 239000002086 nanomaterial Substances 0.000 description 2
- 229920003023 plastic Polymers 0.000 description 2
- 239000004033 plastic Substances 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 239000002904 solvent Substances 0.000 description 2
- 230000003068 static effect Effects 0.000 description 2
- 239000000126 substance Substances 0.000 description 2
- 238000013519 translation Methods 0.000 description 2
- 230000005653 Brownian motion process Effects 0.000 description 1
- 238000012356 Product development Methods 0.000 description 1
- 230000008033 biological extinction Effects 0.000 description 1
- 238000005537 brownian motion Methods 0.000 description 1
- UIZLQMLDSWKZGC-UHFFFAOYSA-N cadmium helium Chemical compound [He].[Cd] UIZLQMLDSWKZGC-UHFFFAOYSA-N 0.000 description 1
- 238000004422 calculation algorithm Methods 0.000 description 1
- 210000000845 cartilage Anatomy 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 239000002537 cosmetic Substances 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 239000006185 dispersion Substances 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000008151 electrolyte solution Substances 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 239000000835 fiber Substances 0.000 description 1
- 239000010419 fine particle Substances 0.000 description 1
- 230000009969 flowable effect Effects 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 238000005194 fractionation Methods 0.000 description 1
- 235000013376 functional food Nutrition 0.000 description 1
- 230000004927 fusion Effects 0.000 description 1
- CPBQJMYROZQQJC-UHFFFAOYSA-N helium neon Chemical compound [He].[Ne] CPBQJMYROZQQJC-UHFFFAOYSA-N 0.000 description 1
- 239000012497 inhomogeneous sample Substances 0.000 description 1
- 230000003834 intracellular effect Effects 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 239000008204 material by function Substances 0.000 description 1
- 244000005700 microbiome Species 0.000 description 1
- 210000003463 organelle Anatomy 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 229920002401 polyacrylamide Polymers 0.000 description 1
- 238000003908 quality control method Methods 0.000 description 1
- 238000005295 random walk Methods 0.000 description 1
- 230000001172 regenerating effect Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 238000001228 spectrum Methods 0.000 description 1
- 238000012916 structural analysis Methods 0.000 description 1
- 230000008961 swelling Effects 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images








Abstract
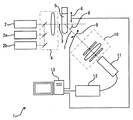
【解決手段】走査機構6により走査した各試料位置において検出した散乱光7に基づく時間平均相関関数−相関時間の緩和データについて、アンサンブル平均相関関数を演算する緩和データとして採用するか否かの閾値を異常な現象に起因する振幅の大きさに基づいて設定する閾値設定手段と、走査機構6により走査した各試料位置における時間平均相関関数−相関時間の緩和データについて、閾値設定手段により設定した閾値に基づいてアンサンブル平均相関関数を演算する緩和データとして採用するか否かを選別する緩和データ選別手段とを備えることを特徴としている。
【選択図】図1
Description
試料にレーザ光を入射するレーザ光源と、
試料をレーザ光源からのレーザ光軸に対して相対移動可能な走査機構と、
レーザ光源から試料に入射したレーザ光の散乱光を検出する検出手段と、
走査機構により走査した各試料位置での検出手段による散乱光の検出結果に基づいて時間平均相関関数−相関時間の緩和データを演算する時間平均相関関数演算手段と、
走査機構により走査した各試料位置における時間平均相関関数−相関時間の緩和データに基づいてアンサンブル平均相関関数−相関時間の緩和データを演算するアンサンブル平均相関関数演算手段とを備えた走査型顕微光散乱測定解析装置において、
時間平均相関関数−相関時間の緩和データについて、アンサンブル平均相関関数を演算する緩和データとして採用するか否かの閾値を異常な現象に起因する振幅の大きさに基づいて設定する閾値設定手段と、
走査機構により走査した各試料位置における時間平均相関関数−相関時間の緩和データについて、閾値設定手段により設定した閾値に基づいてアンサンブル平均相関関数を演算する緩和データとして採用するか否かを選別する緩和データ選別手段とを備えることを特徴としている。
走査型顕微光散乱測定解析装置は、緩和データ選別手段によりアンサンブル平均相関関数の演算に採用しないと決定された不採用緩和データ数の全体の緩和データ数に対する割合について許容範囲の上限値を設定する許容範囲設定手段と、
不採用緩和データ数の割合が許容範囲設定手段により設定された許容範囲を超える場合に閾値を初期値から変化分に応じて変更する閾値変更手段と、
閾値を変化分に応じて最終値まで変更しても不採用緩和データ数が許容範囲を超える場合にアンサンブル平均相関関数の演算を行わずにエラー信号を出力するエラー信号出力手段とを備えることが好ましい。
走査機構により走査した各試料位置での散乱光の測定結果に基づいて算出したアンサンブル平均相関関数−相関時間の緩和データより、空間スケール変更手段により空間スケールを変更した緩和データごとに、逆ラプラス変換により緩和時間分布−緩和時間のピークデータを演算する緩和時間分布演算手段と、
空間スケールを変更したそれぞれの緩和時間分布−緩和時間のピークデータについて、単純緩和、並進運動、および拡散運動の3種類に対応して、緩和時間を相対移動させずに、または緩和時間を空間スケールの大きさに対して比例的に相対移動させ、あるいは緩和時間を空間スケールの大きさに対して二乗依存的に相対移動させて、各ピークデータのピーク位置を重ね合せて積算し、単純緩和、並進運動、および拡散運動を分別してピークデータを演算する分別演算手段とを備えることが好ましい。
開口部の下方に配置され検出手段に散乱光を導入する光学系の一部を構成する対物レンズと、
対物レンズの上面に、対物レンズの上面の周縁部近傍のうち一部を散乱光通過部として開放しそれ以外の部分を覆うように配置され、レーザ光を入射した試料から開口部を通過した散乱光を対物レンズの上面のうち散乱光通過部のみから入射させることによりレーザ光軸に対する散乱角を規定するカバー部材とを備えることが好ましい。
対物レンズの下面側の光学系に配置され、レーザ光を入射した試料からの散乱光のレーザ光軸に対する散乱角を規定する散乱光通過孔が設けられた散乱角選択フィルタとを備えることが好ましい。
走査した各試料位置での散乱光の検出結果に基づいて得られる時間平均相関関数−相関時間の緩和データについて、アンサンブル平均相関関数を演算する緩和データとして採用するか否かの閾値を異常な現象に起因する振幅の大きさに基づいて設定する工程と、
走査した各試料位置での散乱光の検出結果に基づいて、各試料位置における時間平均相関関数−相関時間の緩和データを演算する工程と、
走査した各試料位置における時間平均相関関数−相関時間の緩和データについて、設定した閾値に基づいてアンサンブル平均相関関数を演算する緩和データとして採用するか否かを選別する工程と、
設定した閾値に基づいてアンサンブル平均相関関数を演算する緩和データとして選別した緩和データ群に基づいてアンサンブル平均相関関数−相関時間の緩和データを演算する工程とを含むことを特徴としている。
閾値に基づいてアンサンブル平均相関関数の演算に採用しないと決定された不採用緩和データ数の全体の緩和データ数に対する割合について許容範囲の上限値を設定する工程と、
走査した各試料位置における時間平均相関関数−相関時間の緩和データを演算した結果、不採用緩和データ数の割合が設定された許容範囲を超える場合に閾値を初期値から変化分に応じて変更する工程と、
閾値を変化分に応じて最終値まで変更しても不採用緩和データ数が許容範囲を超える場合にアンサンブル平均相関関数の演算を行わずにエラー信号を出力する工程とを含むことが好ましい。
走査した各試料位置での散乱光の測定結果に基づいて算出したアンサンブル平均相関関数−相関時間の緩和データより、空間スケール変更手段により空間スケールを変更した緩和データごとに、逆ラプラス変換により緩和時間分布−緩和時間のピークデータを演算する工程と、
空間スケールを変更したそれぞれの緩和時間分布−緩和時間のピークデータについて、単純緩和、並進運動、および拡散運動の3種類に対応して、緩和時間を相対移動させずに、または緩和時間を空間スケールの大きさに対して比例的に相対移動させ、あるいは緩和時間を空間スケールの大きさに対して二乗依存的に相対移動させて、各ピークデータのピーク位置を重ね合せて積算し、単純緩和、並進運動、および拡散運動を分別してピークデータを演算する工程とを含むことが好ましい。

2、2a、2b レーザ光源
3 レーザ光
4 光学系
5 試料
5a 試料面
6 走査機構
7 散乱光
8 散乱角
9 散乱角調節機構
10 光学系
11 検出手段
12 信号処理部
13 コンピュータ
14 試料ステージ
14a 上面
14b 開口部
15 対物レンズ
15a 上面
16 カバー部材
17 散乱光通過部
18 流路部材
19 散乱角選択フィルタ
19a 散乱光通過孔
20 結像用レンズ
21 結像面
Claims (14)
- 試料にレーザ光を入射するレーザ光源と、
試料をレーザ光源からのレーザ光軸に対して相対移動可能な走査機構と、
レーザ光源から試料に入射したレーザ光の散乱光を検出する検出手段と、
走査機構により走査した各試料位置での検出手段による散乱光の検出結果に基づいて時間平均相関関数−相関時間の緩和データを演算する時間平均相関関数演算手段と、
走査機構により走査した各試料位置における時間平均相関関数−相関時間の緩和データに基づいてアンサンブル平均相関関数−相関時間の緩和データを演算するアンサンブル平均相関関数演算手段とを備えた走査型顕微光散乱測定解析装置において、
時間平均相関関数−相関時間の緩和データについて、アンサンブル平均相関関数を演算する緩和データとして採用するか否かの閾値を異常な現象に起因する振幅の大きさに基づいて設定する閾値設定手段と、
走査機構により走査した各試料位置における時間平均相関関数−相関時間の緩和データについて、閾値設定手段により設定した閾値に基づいてアンサンブル平均相関関数を演算する緩和データとして採用するか否かを選別する緩和データ選別手段とを備えることを特徴とする走査型顕微光散乱測定解析装置。 - 異常な現象に基づく振幅は、緩和成分が少なく横一直線に近い緩和データの振幅、機械的または電気的な振動による異常振幅、緩和データの裾野における跳ね上がりの振幅、および緩和データの裾野における減少振幅から選ばれる1種以上であることを特徴とする請求項1に記載の走査型顕微光散乱測定解析装置。
- 閾値設定手段は、閾値の初期値、変化分、および最終値を設定し、
走査型顕微光散乱測定解析装置は、緩和データ選別手段によりアンサンブル平均相関関数の演算に採用しないと決定された不採用緩和データ数の全体の緩和データ数に対する割合について許容範囲の上限値を設定する許容範囲設定手段と、
不採用緩和データ数の割合が許容範囲設定手段により設定された許容範囲を超える場合に閾値を初期値から変化分に応じて変更する閾値変更手段と、
閾値を変化分に応じて最終値まで変更しても不採用緩和データ数が許容範囲を超える場合にアンサンブル平均相関関数の演算を行わずにエラー信号を出力するエラー信号出力手段とを備えることを特徴とする請求項1または2に記載の走査型顕微光散乱測定解析装置。 - 走査機構により走査した各試料位置での散乱光をレーザ光の波長およびレーザ光軸に対する散乱角から選ばれるいずれかの空間スケールを変更して測定可能な空間スケール変更手段と、
走査機構により走査した各試料位置での散乱光の測定結果に基づいて算出したアンサンブル平均相関関数−相関時間の緩和データより、空間スケール変更手段により空間スケールを変更した緩和データごとに、逆ラプラス変換により緩和時間分布−緩和時間のピークデータを演算する緩和時間分布演算手段と、
空間スケールを変更したそれぞれの緩和時間分布−緩和時間のピークデータについて、単純緩和、並進運動、および拡散運動の3種類に対応して、緩和時間を相対移動させずに、または緩和時間を空間スケールの大きさに対して比例的に相対移動させ、あるいは緩和時間を空間スケールの大きさに対して二乗依存的に相対移動させて、各ピークデータのピーク位置を重ね合せて積算し、単純緩和、並進運動、および拡散運動を分別してピークデータを演算する分別演算手段とを備えることを特徴とする請求項1から3のいずれかに記載の走査型顕微光散乱測定解析装置。 - 空間スケール変更手段は、試料への入射光軸を揃えた波長の異なる複数のレーザ光源であり、空間スケールとしてレーザ光の波長を変更することを特徴とする請求項4に記載の走査型顕微光散乱測定解析装置。
- 空間スケール変更手段は、試料からの散乱光のレーザ光軸に対する散乱角を変更可能な散乱角変更手段であり、空間スケールとして散乱角を変更することを特徴とする請求項4に記載の走査型顕微光散乱測定解析装置。
- 試料が上面に位置する開口部を有する試料ステージと、
開口部の下方に配置され検出手段に散乱光を導入する光学系の一部を構成する対物レンズと、
対物レンズの上面に、対物レンズの上面の周縁部近傍のうち一部を散乱光通過部として開放しそれ以外の部分を覆うように配置され、レーザ光を入射した試料から開口部を通過した散乱光を対物レンズの上面のうち散乱光通過部のみから入射させることによりレーザ光軸に対する散乱角を規定するカバー部材とを備えることを特徴とする請求項1から6のいずれかに記載の走査型顕微光散乱測定解析装置。 - 試料面に対向配置された対物レンズと、
対物レンズの下面側の光学系に配置され、レーザ光を入射した試料からの散乱光のレーザ光軸に対する散乱角を規定する散乱光通過孔が設けられた散乱角選択フィルタとを備えることを特徴とする請求項1から6のいずれかに記載の走査型顕微光散乱測定解析装置。 - レーザ光源から試料にレーザ光を入射し、試料をレーザ光軸に対して相対移動させて走査し各試料位置からの散乱光を検出する走査型顕微光散乱による光散乱解析方法において、
走査した各試料位置での散乱光の検出結果に基づいて得られる時間平均相関関数−相関時間の緩和データについて、アンサンブル平均相関関数を演算する緩和データとして採用するか否かの閾値を異常な現象に起因する振幅の大きさに基づいて設定する工程と、
走査した各試料位置での散乱光の検出結果に基づいて、各試料位置における時間平均相関関数−相関時間の緩和データを演算する工程と、
走査した各試料位置における時間平均相関関数−相関時間の緩和データについて、設定した閾値に基づいてアンサンブル平均相関関数を演算する緩和データとして採用するか否かを選別する工程と、
設定した閾値に基づいてアンサンブル平均相関関数を演算する緩和データとして選別した緩和データ群に基づいてアンサンブル平均相関関数−相関時間の緩和データを演算する工程とを含むことを特徴とする光散乱解析方法。 - 異常な現象に基づく振幅は、緩和成分が少なく横一直線に近い緩和データの振幅、機械的または電気的な振動による異常振幅、緩和データの裾野における跳ね上がりの振幅、および緩和データの裾野における減少振幅から選ばれる1種以上であることを特徴とする請求項9に記載の光散乱解析方法。
- 閾値の初期値、変化分、および最終値を設定する工程と、
閾値に基づいてアンサンブル平均相関関数の演算に採用しないと決定された不採用緩和データ数の全体の緩和データ数に対する割合について許容範囲の上限値を設定する工程と、
走査した各試料位置における時間平均相関関数−相関時間の緩和データを演算した結果、不採用緩和データ数の割合が設定された許容範囲を超える場合に閾値を初期値から変化分に応じて変更する工程と、
閾値を変化分に応じて最終値まで変更しても不採用緩和データ数が許容範囲を超える場合にアンサンブル平均相関関数の演算を行わずにエラー信号を出力する工程とを含むことを特徴とする請求項9または10に記載の光散乱解析方法。 - 走査した各試料位置での散乱光をレーザ光の波長およびレーザ光軸に対する散乱角から選ばれるいずれかの空間スケールを変更して測定する工程と、
走査した各試料位置での散乱光の測定結果に基づいて算出したアンサンブル平均相関関数−相関時間の緩和データより、空間スケール変更手段により空間スケールを変更した緩和データごとに、逆ラプラス変換により緩和時間分布−緩和時間のピークデータを演算する工程と、
空間スケールを変更したそれぞれの緩和時間分布−緩和時間のピークデータについて、単純緩和、並進運動、および拡散運動の3種類に対応して、緩和時間を相対移動させずに、または緩和時間を空間スケールの大きさに対して比例的に相対移動させ、あるいは緩和時間を空間スケールの大きさに対して二乗依存的に相対移動させて、各ピークデータのピーク位置を重ね合せて積算し、単純緩和、並進運動、および拡散運動を分別してピークデータを演算する工程とを含むことを特徴とする請求項9〜11のいずれかに記載の光散乱解析方法。 - 試料への入射光軸を揃えた波長の異なる複数のレーザ光源を用いて、空間スケールとしてレーザ光の波長を変更することを特徴とする請求項12に記載の光散乱解析方法。
- 空間スケールとして、試料からの散乱光のレーザ光軸に対する散乱角を変更することを特徴とする請求項12に記載の光散乱解析方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011083131A JP5883233B2 (ja) | 2011-03-16 | 2011-03-16 | 走査型顕微光散乱測定解析装置および光散乱解析方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011083131A JP5883233B2 (ja) | 2011-03-16 | 2011-03-16 | 走査型顕微光散乱測定解析装置および光散乱解析方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012194165A true JP2012194165A (ja) | 2012-10-11 |
| JP5883233B2 JP5883233B2 (ja) | 2016-03-09 |
Family
ID=47086186
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011083131A Expired - Fee Related JP5883233B2 (ja) | 2011-03-16 | 2011-03-16 | 走査型顕微光散乱測定解析装置および光散乱解析方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5883233B2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016133435A (ja) * | 2015-01-20 | 2016-07-25 | 株式会社リコー | 光学装置及び情報処理システム |
| JP2016176724A (ja) * | 2015-03-18 | 2016-10-06 | 株式会社リコー | 情報処理システム |
| JP2018515787A (ja) * | 2015-03-06 | 2018-06-14 | フラウンホーファー−ゲゼルシャフト ツル フェルデルング デル アンゲヴァンテン フォルシュング エー ファウFraunhofer−Gesellschaft zur Foerderung der angewandten Forschung e.V. | 空間的広がりを有する生物試料における動きを光学的に検出するのための方法および装置 |
| US10690593B2 (en) | 2015-11-13 | 2020-06-23 | Horiba, Ltd. | Sample analyzer and recording medium recording sample analysis program |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10120795A (ja) * | 1996-10-17 | 1998-05-12 | Tosoh Corp | ポリ塩化ビニルのゲル化度の測定方法及び測定装置 |
| JP2000214086A (ja) * | 1999-01-25 | 2000-08-04 | Otsuka Denshi Co Ltd | ゲル化過程またはゲル状態の観測方法 |
| JP2006071497A (ja) * | 2004-09-02 | 2006-03-16 | Hokkaido Univ | 光散乱装置、光散乱測定法、光散乱解析装置および光散乱測定解析法 |
| JP2008039539A (ja) * | 2006-08-04 | 2008-02-21 | Shimadzu Corp | 光散乱検出装置 |
| JP2009011927A (ja) * | 2007-07-04 | 2009-01-22 | Tokyo Institute Of Technology | 限外濾過膜およびその製造方法、並びにナノ粒子のサイズ分別方法 |
-
2011
- 2011-03-16 JP JP2011083131A patent/JP5883233B2/ja not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10120795A (ja) * | 1996-10-17 | 1998-05-12 | Tosoh Corp | ポリ塩化ビニルのゲル化度の測定方法及び測定装置 |
| JP2000214086A (ja) * | 1999-01-25 | 2000-08-04 | Otsuka Denshi Co Ltd | ゲル化過程またはゲル状態の観測方法 |
| JP2006071497A (ja) * | 2004-09-02 | 2006-03-16 | Hokkaido Univ | 光散乱装置、光散乱測定法、光散乱解析装置および光散乱測定解析法 |
| JP2008039539A (ja) * | 2006-08-04 | 2008-02-21 | Shimadzu Corp | 光散乱検出装置 |
| JP2009011927A (ja) * | 2007-07-04 | 2009-01-22 | Tokyo Institute Of Technology | 限外濾過膜およびその製造方法、並びにナノ粒子のサイズ分別方法 |
Non-Patent Citations (1)
| Title |
|---|
| 古川英光,外: "走査顕微光散乱(スマイルズ)によるゲルの網目構造解析システムの実用化", 高分子学会予稿集, vol. 59巻2号, JPN6014047418, 1 September 2010 (2010-09-01), pages 4329 - 4330, ISSN: 0003236158 * |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016133435A (ja) * | 2015-01-20 | 2016-07-25 | 株式会社リコー | 光学装置及び情報処理システム |
| JP2018515787A (ja) * | 2015-03-06 | 2018-06-14 | フラウンホーファー−ゲゼルシャフト ツル フェルデルング デル アンゲヴァンテン フォルシュング エー ファウFraunhofer−Gesellschaft zur Foerderung der angewandten Forschung e.V. | 空間的広がりを有する生物試料における動きを光学的に検出するのための方法および装置 |
| JP2016176724A (ja) * | 2015-03-18 | 2016-10-06 | 株式会社リコー | 情報処理システム |
| US10690593B2 (en) | 2015-11-13 | 2020-06-23 | Horiba, Ltd. | Sample analyzer and recording medium recording sample analysis program |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5883233B2 (ja) | 2016-03-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Nawaz et al. | Cell visco-elasticity measured with AFM and optical trapping at sub-micrometer deformations | |
| Kim et al. | Profiling individual human red blood cells using common-path diffraction optical tomography | |
| Giavazzi et al. | Digital Fourier microscopy for soft matter dynamics | |
| Sarshar et al. | Comparative study of methods to calibrate the stiffness of a single-beam gradient-force optical tweezers over various laser trapping powers | |
| Ahmed et al. | Active cell mechanics: Measurement and theory | |
| Gross-Rother et al. | Particle detection and characterization for biopharmaceutical applications: current principles of established and alternative techniques | |
| US9013692B2 (en) | Flow cytometer apparatus for three dimensional difraction imaging and related methods | |
| Buosciolo et al. | New calibration method for position detector for simultaneous measurements of force constants and local viscosity in optical tweezers | |
| Wright | Nanoparticle tracking analysis for the multiparameter characterization and counting of nanoparticle suspensions | |
| US11193877B2 (en) | Method for the characterization of objects by means of scattered radiation analysis and related instrumentations | |
| JP4517145B2 (ja) | 光散乱装置、光散乱測定法、光散乱解析装置および光散乱測定解析法 | |
| JP6858795B2 (ja) | 開放型光共振キャビティにおける粒子特性評価 | |
| Nepomniashchaia et al. | Use of laser correlation spectroscopy to investigate the parameters of biological suspensions | |
| JP5883233B2 (ja) | 走査型顕微光散乱測定解析装置および光散乱解析方法 | |
| JP2019534463A (ja) | Huモーメントを用いるホログラフィック特性評価 | |
| Mir et al. | Diffraction Phase Cytometry: blood on a CD-ROM | |
| Bolognesi et al. | Digital holographic tracking of microprobes for multipoint viscosity measurements | |
| Hajjarian et al. | Evaluating platelet aggregation dynamics from laser speckle fluctuations | |
| Yue et al. | Easy method to determine refractive indices of microspheres and in micro-regions of inhomogeneous media | |
| Aristov et al. | Use of lying drop photometry for clinical laboratory diagnostics | |
| Blattler et al. | A Novel Method for 3D Nanoscale Tracking of 100 nm Polystyrene Particles in Multi-Wavelength Evanescent Fields Microscopy–Absolute Difference Height Verification– | |
| CN206906221U (zh) | 一种研究单分子层的摩擦学的装置 | |
| Saglimbeni et al. | Holographic tracking and sizing of optically trapped microprobes in diamond anvil cells | |
| Carvalho | Analytical tweezers for cell manipulation and diagnostic | |
| Li et al. | Holographic imaging platform for particle discrimination based on simultaneous mass density and refractive index measurements |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140228 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20141031 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20141111 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150616 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160119 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160205 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5883233 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |