JP2012193025A - Method of setting criteria for selection of escalator or auto slope - Google Patents
Method of setting criteria for selection of escalator or auto slope Download PDFInfo
- Publication number
- JP2012193025A JP2012193025A JP2011059014A JP2011059014A JP2012193025A JP 2012193025 A JP2012193025 A JP 2012193025A JP 2011059014 A JP2011059014 A JP 2011059014A JP 2011059014 A JP2011059014 A JP 2011059014A JP 2012193025 A JP2012193025 A JP 2012193025A
- Authority
- JP
- Japan
- Prior art keywords
- escalator
- slope
- auto
- degrees
- range
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images



Abstract
Description
本発明は、公共空間における歩行者の移動を補助するエスカレータかオートスロープかの選択基準の設定方法に関するものである。 The present invention relates to a method for setting a reference for selecting an escalator or an auto slope that assists a pedestrian in a public space.
近年、公共空間における歩行者の移動を補助する目的でオートスロープ(傾斜型動く歩道)が導入されるケースが増えている。かかるオートスロープは踏面に段差がないため、エスカレータのように利用客が歩くことを制限する必要が無く、そのため旅客の流動が妨げられないといった利点を有している(下記特許文献1〜3参照)。
In recent years, there have been an increasing number of cases where an auto slope (an inclined moving sidewalk) is introduced for the purpose of assisting the movement of pedestrians in public spaces. Since such an auto slope has no step on the tread surface, there is no need to restrict the walking of the passenger like an escalator, and thus has the advantage that the flow of passengers is not hindered (see
しかしながら、反面、上記したオートスロープは、設置面の勾配がそのまま踏面の傾斜となるため、勾配が急になると利用者の身体に対する負担が増加したり、急停止などの際に利用者が転倒し易いといった弊害が考えられる。
一般に、勾配が急な箇所にはエスカレータが、勾配が緩やかな箇所にはオートスロープが採用されるが、設置基準の上では両者共に設置可能な勾配範囲も存在し、そうした場合にいずれを採用するかを決めるのが難しい。
On the other hand, however, the above-mentioned auto slope has the slope of the tread surface as it is, so if the slope becomes steep, the burden on the user's body increases or the user falls over in the event of a sudden stop, etc. It can be considered harmful.
In general, escalators are used for places with steep slopes, and auto-slope is used for places with gentle slopes. It is difficult to decide.
そこで、本発明は、上記状況に鑑みて、エスカレータとオートスロープが共に設置可能な勾配範囲において、両者の安全性を利用者の体感評価に基づいて比較して得られた選好割合を示す数式と、勾配角度とを基準値とするエスカレータかオートスロープかの選択基準の設定方法を提供することを目的とする。 Therefore, in view of the above situation, the present invention, in a gradient range where both an escalator and an auto slope can be installed, is a mathematical formula indicating a preference ratio obtained by comparing the safety of both based on the user's experience evaluation, and An object of the present invention is to provide a method for setting a reference for selecting an escalator or an auto slope using a gradient angle as a reference value.
本発明は、上記目的を達成するために、
〔1〕エスカレータかオートスロープかの選択基準の設定方法であって、エスカレータとオートスロープが共に設置可能な勾配範囲において、安全上の観点からエスカレータが選好される割合を示す下記式(1)の値とオートスロープが選好される割合を示す下記式(2)の値との交点の勾配角度を、エスカレータかオートスロープかの選択の基準値とすることを特徴とする。
In order to achieve the above object, the present invention provides
[1] A method for setting an escalator or an auto slope selection criterion, which indicates a ratio of preference for an escalator from the viewpoint of safety in a gradient range where both the escalator and the auto slope can be installed. The gradient angle of the intersection of the value and the value of the following formula (2) indicating the ratio of preference for the auto slope is used as a reference value for selection between the escalator and the auto slope.
y=a+b〔(еkx−1)/k〕 …(1)
y=100−{a+b〔(еkx−1)/k〕} …(2)
ただし、a,b,kは下記表に示す係数であり、еは自然対数の底である。
y = a + b [(е kx −1) / k] (1)
y = 100− {a + b [(е kx −1) / k]} (2)
Where a, b, and k are the coefficients shown in the following table, and е is the base of the natural logarithm.
本発明によれば、エスカレータとオートスロープが共に設置可能な勾配範囲において、どちらを選択するかを適切に設定することができる。 ADVANTAGE OF THE INVENTION According to this invention, it can set appropriately which is selected in the gradient range which can install both an escalator and an auto slope.
本発明のエスカレータかオートスロープかの選択基準の設定方法は、エスカレータとオートスロープが共に設置可能な勾配範囲において、安全上の観点からエスカレータが選好される割合を示す下記式(1)の値とオートスロープが選好される割合を示す下記式(2)の値との交点の勾配角度を、エスカレータかオートスロープかの選択の基準値とする。
y=a+b〔(еkx−1)/k〕 …(1)
y=100−{a+b〔(еkx−1)/k〕} …(2)
ただし、a,b,kは下記表に示す係数であり、еは自然対数の底である。
The method for setting the escalator or auto slope selection criterion according to the present invention includes a value of the following formula (1) indicating a ratio of preference for the escalator from a safety point of view in a gradient range where both the escalator and the auto slope can be installed. The gradient angle of the intersection point with the value of the following formula (2) indicating the ratio of preference for auto slope is used as a reference value for selection between escalator and auto slope.
y = a + b [(е kx −1) / k] (1)
y = 100− {a + b [(е kx −1) / k]} (2)
Where a, b, and k are the coefficients shown in the following table, and е is the base of the natural logarithm.
以下、本発明の実施の形態について詳細に説明する。
まず、エスカレータとオートスロープが共に設置可能な勾配範囲において、両者の安全性を利用者の体感評価に基づいて比較した。その結果、以下のことが明らかとなった。
(1)姿勢の安定性の観点では、踏面が水平であるエスカレータの方が概してオートスロープよりも安全であり、特に降り条件ではこれが顕著である。
Hereinafter, embodiments of the present invention will be described in detail.
First, in the slope range where both escalators and auto slopes can be installed, the safety of both was compared based on the user's experience evaluation. As a result, the following became clear.
(1) From the standpoint of posture stability, escalators whose treads are horizontal are generally safer than auto slopes, and this is particularly noticeable in descending conditions.
(2)利用者による選好率の観点では、踏み出し率においてエスカレータが大きく下回らない限りオートスロープが好まれる。これはオートスロープに段差がないなどの利点があるためと考えられる。
(3)停止時の減速度を抑えると、エスカレータ、オートスロープとも安全性は向上するが、選好比較ではエスカレータを好む傾向が強まる。
(2) From the viewpoint of the preference rate by the user, auto slope is preferred unless the escalator is significantly lower in the stepping rate. This is considered to be because there are advantages such as no step in the auto slope.
(3) If the deceleration at the time of stopping is suppressed, the safety of both the escalator and the auto slope is improved, but in the preference comparison, the tendency to prefer the escalator becomes stronger.
(4)勾配の急な場所にオートスロープを設置する場合は、安全性上減速度を0.6m/s2 より低く抑える必要がある。
図1は本発明の実施例を示すエスカレータとオートスロープの勾配とそれに基づくエスカレータとオートスロープの選好された割合を示す図である。
配置すべきエスカレータとオートスロープの勾配範囲が4度〜12度の領域において、利用者によるエスカレータとオートスロープの選好割合は、図1で示されるようになっている。
(4) When an auto slope is installed in a place with a steep slope, the deceleration must be kept lower than 0.6 m / s 2 for safety.
FIG. 1 is a diagram showing the gradient of an escalator and an auto slope according to an embodiment of the present invention, and a preferred ratio of the escalator and the auto slope based on the slope.
In a region where the gradient range of the escalator and the auto slope to be arranged is 4 degrees to 12 degrees, the preference ratio of the escalator and the auto slope by the user is as shown in FIG.
図1に示すように、従来停止方式を採用する場合は、勾配範囲が4度〜5度未満であれば、オートスロープ●がエスカレータ■に比べて好まれる。一方、勾配範囲が5度〜12度となると、エスカレータ■がオートスロープ●に比べて好まれる。
また、ルーズ停止方式を採用する場合は、勾配範囲が4度〜4.4度未満であれば、オートスロープ○がエスカレータ□に比べて好まれる。一方、勾配範囲が4.4度〜12度となると、エスカレータ□がオートスロープ○に比べて好まれる。
As shown in FIG. 1, when the conventional stopping method is adopted, if the gradient range is 4 degrees to less than 5 degrees, the auto slope ● is preferred over the escalator ■. On the other hand, when the gradient range is 5 degrees to 12 degrees, the escalator ■ is preferred over the auto slope ●.
Further, when the loose stop method is adopted, if the gradient range is 4 degrees to less than 4.4 degrees, the auto slope ○ is preferred over the escalator □. On the other hand, when the gradient range is 4.4 to 12 degrees, the escalator □ is preferred over the auto slope ◯.
なお、本発明において、従来停止方式とは、多くのエスカレータで用いられている緊急停止の減速度(1.0m/s2 )による停止方式であり、ルーズ停止方式とは旅客への影響を考慮して一部のメーカーが採用している、緩やかな減速度(0.6m/s2 )による停止方式である。
上記したエスカレータの選好特性を示す式(1)は以下のように示すことができる。
In the present invention, the conventional stop method is a stop method based on the emergency stop deceleration (1.0 m / s 2 ) used in many escalators, and the loose stop method considers the influence on passengers. Therefore, this is a stopping method with a slow deceleration (0.6 m / s 2 ) that is used by some manufacturers.
Formula (1) which shows the preference characteristic of an above-mentioned escalator can be shown as follows.
y=a+b〔(еkx−1)/k〕 …(1)
また、上記したオートスロープの選好特性を示す式(2)は以下のように示すことができる。
y=100−{a+b〔(еkx−1)/k〕} …(2)
ここで、従来停止およびルーズ停止の場合の係数a,b,kは、それぞれ表1に示す通りであり、еは自然対数の底を示しており、е=2.718である。
y = a + b [(е kx −1) / k] (1)
Moreover, Formula (2) which shows the preference characteristic of the above-mentioned auto slope can be shown as follows.
y = 100− {a + b [(е kx −1) / k]} (2)
Here, the coefficients a, b, and k in the case of the conventional stop and the loose stop are as shown in Table 1, respectively, е indicates the base of the natural logarithm, and е = 2.718.
上記を踏まえて、本発明のエスカレータまたはオートスロープは以下のように示される。
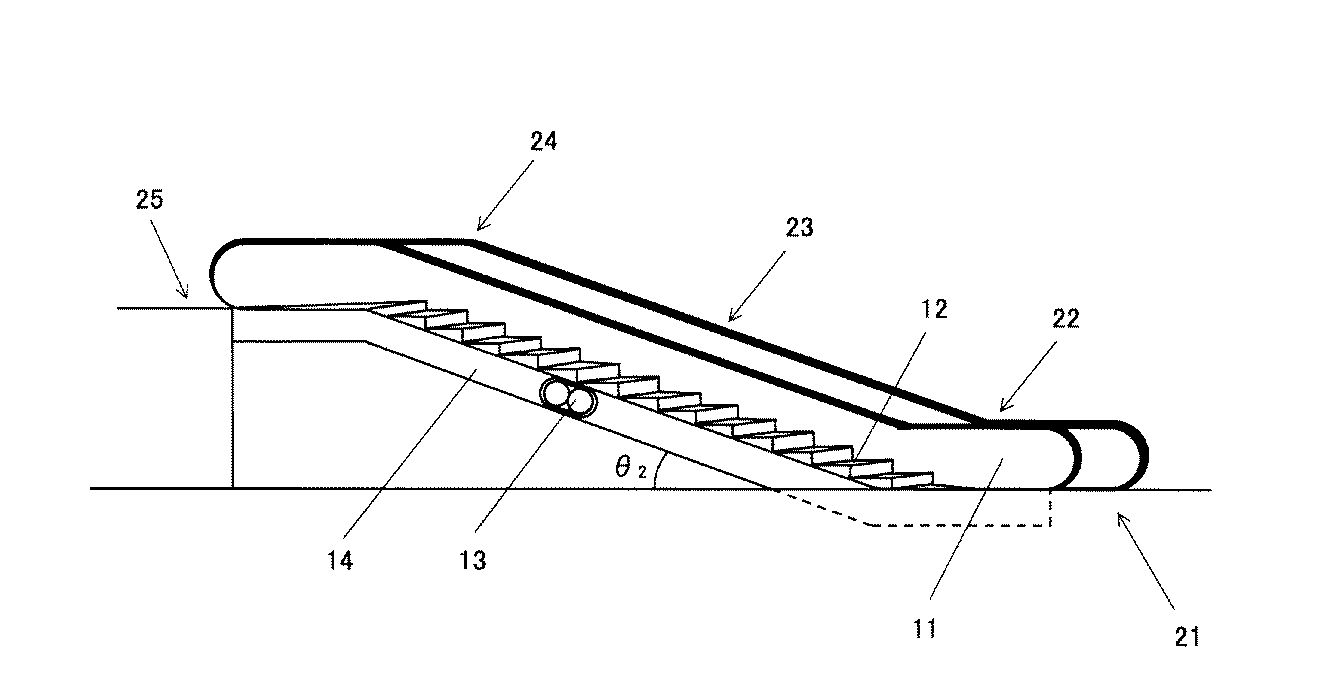
図2は本発明に係るオートスロープの模式図、図3は本発明に係るエスカレータの模式図である。
図2において、オートスロープは、コンベア1の両側に1本ずつ、合わせて2本の手摺2を備えている。この手摺2は、フレーム部3,4に固定された手摺枠5を有する。この手摺枠5には循環式の手摺ベルト6が装着されている。また、7は下側乗り口部、8は上側降り口部である。
Based on the above, the escalator or auto slope of the present invention is shown as follows.
FIG. 2 is a schematic diagram of an auto slope according to the present invention, and FIG. 3 is a schematic diagram of an escalator according to the present invention.
In FIG. 2, the auto slope has two handrails 2, one on each side of the
そして、この実施例におけるオートスロープは、勾配角度θ1 が4度から5度(従来停止方式を採用する場合;ルーズ停止方式を採用する場合は4度から4.4度)となるように構成することが望ましい。
一方、図3において、11は主枠、12は踏板、13は駆動装置、14は駆動レール、21は下側乗り口部、22は下曲部、23は中間傾斜部、24は上曲部、25は上側降り口部である。
The auto slope in this embodiment is configured such that the gradient angle θ 1 is 4 degrees to 5 degrees (when the conventional stop method is employed; 4 degrees to 4.4 degrees when the loose stop method is employed). It is desirable to do.
On the other hand, in FIG. 3, 11 is a main frame, 12 is a tread, 13 is a driving device, 14 is a driving rail, 21 is a lower entrance, 22 is a lower bending portion, 23 is an intermediate inclined portion, and 24 is an upper bending portion. , 25 is an upper exit part.
この実施例におけるエスカレータは、勾配角度θ2 が5度〜12度(従来停止方式を採用する場合;ルーズ停止方式を採用する場合は4度から4.4度)となるように構成することが望ましい。
上記したように、図2のオートスロープの場合はその勾配角度は4度〜5度(従来停止方式を採用する場合;ルーズ停止方式を採用する場合は4度〜4.4度)であり、図3のエスカレータの場合はその勾配角度は5度〜12度(従来停止方式を採用する場合;ルーズ停止方式を採用する場合は4.4度〜12度)である。
The escalator in this embodiment may be configured such that the gradient angle θ 2 is 5 ° to 12 ° (when the conventional stop method is adopted; 4 ° to 4.4 ° when the loose stop method is adopted). desirable.
As described above, in the case of the auto slope of FIG. 2, the gradient angle is 4 ° to 5 ° (when the conventional stop method is adopted; when the loose stop method is adopted, 4 ° to 4.4 °), In the case of the escalator shown in FIG. 3, the gradient angle is 5 degrees to 12 degrees (when the conventional stop method is adopted; 4.4 degrees to 12 degrees when the loose stop method is adopted).
なお、本発明は上記実施例に限定されるものではなく、本発明の趣旨に基づき種々の変形が可能であり、これらを本発明の範囲から排除するものではない。 In addition, this invention is not limited to the said Example, Based on the meaning of this invention, a various deformation | transformation is possible and these are not excluded from the scope of the present invention.
本発明のエスカレータかオートスロープかの選択基準の設定方法は、エスカレータとオートスロープが共に設置可能な勾配範囲において、どちらを選択するかを適切に設定するツールとして利用可能である。 The escalator or auto slope selection criterion setting method of the present invention can be used as a tool for appropriately setting which one to select in the slope range where both the escalator and the auto slope can be installed.
1 コンベア
2 2本の手摺
3 フレーム部
4 手摺枠
5 循環式の手摺ベルト
6 乗り口部
7,21 下側降り口部
8,25 上側降り口部
11 主枠
12 踏板
13 駆動装置
14 駆動レール
22 下曲部
23 中間傾斜部
24 上曲部
DESCRIPTION OF
Claims (2)
y=a+b〔(еkx−1)/k〕 …(1)
y=100−{a+b〔(еkx−1)/k〕} …(2)
ただし、a,b,kは下記表に示す係数であり、еは自然対数の底である。
y = a + b [(е kx −1) / k] (1)
y = 100− {a + b [(е kx −1) / k]} (2)
Where a, b, and k are the coefficients shown in the following table, and е is the base of the natural logarithm.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011059014A JP2012193025A (en) | 2011-03-17 | 2011-03-17 | Method of setting criteria for selection of escalator or auto slope |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011059014A JP2012193025A (en) | 2011-03-17 | 2011-03-17 | Method of setting criteria for selection of escalator or auto slope |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012193025A true JP2012193025A (en) | 2012-10-11 |
Family
ID=47085318
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011059014A Withdrawn JP2012193025A (en) | 2011-03-17 | 2011-03-17 | Method of setting criteria for selection of escalator or auto slope |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012193025A (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103487371A (en) * | 2013-08-16 | 2014-01-01 | 上海交通大学 | Method for dividing anti-skid grades of related components of escalator |
| JP2016179877A (en) * | 2015-03-24 | 2016-10-13 | 株式会社日立ビルシステム | Moving sidewalk |
-
2011
- 2011-03-17 JP JP2011059014A patent/JP2012193025A/en not_active Withdrawn
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103487371A (en) * | 2013-08-16 | 2014-01-01 | 上海交通大学 | Method for dividing anti-skid grades of related components of escalator |
| JP2016179877A (en) * | 2015-03-24 | 2016-10-13 | 株式会社日立ビルシステム | Moving sidewalk |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6389788B2 (en) | Passenger conveyor | |
| JP2013067442A (en) | Passenger conveyor and device for displaying operation of passenger conveyor | |
| JP2012193025A (en) | Method of setting criteria for selection of escalator or auto slope | |
| JP2013177236A (en) | Elevator control device | |
| JP2012184073A (en) | Footstep device of escalator | |
| EP2848572B1 (en) | Escalator step and escalator with the same | |
| JP2006264851A (en) | Escalator and its operation method | |
| JP5770326B1 (en) | Escalator steps | |
| CN109052105A (en) | A kind of machine-roomless lift arragement construction | |
| CN108137269B (en) | Lift facility | |
| KR101878207B1 (en) | Non-slip for stairs | |
| JP5280017B2 (en) | Escalator device | |
| US20170107083A1 (en) | Machine room-less elevator | |
| CN204980803U (en) | Take automatic escalator of leading warning effect | |
| JP5931967B2 (en) | Passenger conveyor | |
| JP2007297158A (en) | Step for escalator | |
| JP4826165B2 (en) | Escalator | |
| JP2010195531A (en) | Escalator | |
| JP4730512B2 (en) | Escalator Safety Guard | |
| JP2011148410A (en) | Handrail for vehicle | |
| JP6234873B2 (en) | Escalator steps | |
| JP2016199857A (en) | Stairway structure | |
| JP2012046274A (en) | Delta guard having flexibility and elasticity | |
| JP2020158221A (en) | Passenger conveyor | |
| CN106698154A (en) | Balancing method for lower driving type double-rail chairlift chair |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20140603 |