JP2012148724A - Outrigger control device - Google Patents
Outrigger control device Download PDFInfo
- Publication number
- JP2012148724A JP2012148724A JP2011010433A JP2011010433A JP2012148724A JP 2012148724 A JP2012148724 A JP 2012148724A JP 2011010433 A JP2011010433 A JP 2011010433A JP 2011010433 A JP2011010433 A JP 2011010433A JP 2012148724 A JP2012148724 A JP 2012148724A
- Authority
- JP
- Japan
- Prior art keywords
- outrigger
- state
- instruction
- jack
- grounding
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Landscapes
- Operation Control Of Excavators (AREA)
- Vehicle Cleaning, Maintenance, Repair, Refitting, And Outriggers (AREA)
- Jib Cranes (AREA)
Abstract
Description
本発明は、ホイール式作業車両のアウトリガ制御装置に関する。 The present invention relates to an outrigger control device for a wheeled work vehicle.
従来から、圧力変化に基づいてタイヤの浮き状態やアウトリガの接地を検出し、タイヤの浮き制御、車体の水平制御を行うアウトリガの自動張り出し装置が知られている(たとえば特許文献1)。 2. Description of the Related Art Conventionally, an outrigger automatic overhanging device that detects a tire floating state or an outrigger ground contact based on a pressure change and performs tire floating control and vehicle body horizontal control is known (for example, Patent Document 1).
しかしながら、作業者が操作を開始した時点におけるアウトリガの状態を検出していない。このため、アウトリガの駆動がジャッキアップや収納を完了していない状態で停止している場合に、作業者からアウトリガの接地切換のための操作が行われると、アウトリガロッドを収縮させるのか伸張させるのかを判別できないという問題がある。 However, the state of the outrigger at the time when the operator starts the operation is not detected. For this reason, when the outrigger drive is stopped without jacking up or retracting and the operator performs an operation for switching the grounding of the outrigger, whether the outrigger rod is contracted or extended There is a problem that cannot be determined.
請求項1に記載のアウトリガ制御装置は、油圧ポンプから吐出される圧油によりアウトリガを駆動するアウトリガシリンダと、アウトリガが少なくとも収納状態、ジャッキアップ状態、および接地状態のいずれかの状態になるように指示する指示手段と、アウトリガシリンダに働く負荷を検出する負荷検出手段と、負荷検出手段により検出された負荷に基づいて、アウトリガの状態を検出する検出手段と、指示手段による操作指示と、検出手段により検出されたアウトリガの状態とに基づいて、アウトリガが指示手段で指示された状態となるように、アウトリガシリンダに対する圧油の給排を制御する制御手段とを備えることを特徴とする。
The outrigger control device according to
本発明によれば、アウトリガの現在の駆動状態を検出し、検出された操作指示と検出された現在の駆動状態とにより、アウトリガシリンダの駆動の種別を設定することができる。 According to the present invention, the current driving state of the outrigger can be detected, and the type of driving of the outrigger cylinder can be set based on the detected operation instruction and the detected current driving state.
本発明の実施の形態によるアウトリガ制御装置を添付図面に従って詳細に説明する。
−第1の実施の形態−
図1〜図6は本発明の第1の実施の形態を示している。
図1に示すように、ホイール式油圧ショベルは、走行体100と、走行体100上に、旋回装置(図示省略)によって旋回可能に搭載された旋回体102とを有する。旋回体102には運転室104および作業用フロントアタッチメント106が設けられ、作業用フロントアタッチメント106は、ブーム108、アーム110、バケット112を備える。ブーム108およびアーム110は、ブームシリンダ114、アームシリンダ116によってそれぞれ駆動されて起伏し、バケット112は、バケットシリンダ118によって駆動され、クラウドまたはダンプの動作をする。
An outrigger control device according to an embodiment of the present invention will be described in detail with reference to the accompanying drawings.
-First embodiment-
1 to 6 show a first embodiment of the present invention.
As shown in FIG. 1, the wheel-type hydraulic excavator includes a traveling
走行体100には、走行のための複数(たとえば4輪)の車輪(ホイール)120と、車輪120を駆動するための油圧駆動走行モータが設けられ、油圧駆動走行モータの駆動力は、プロペラシャフト、アクスル(図示省略)を介して車輪120に伝達される。走行体100の車両後端にはアウトリガ装置200が設けられている。このアウトリガ装置200は、図3に示すアウトリガ制御装置400により駆動制御される。
The traveling
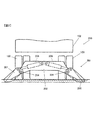
図2に示すように、アウトリガ装置200は、走行体100に設けられた支持部202と、支持部202に回動軸204によって回動可能に支持されているアウトリガ201と、支持部202に収容され、回動軸204を揺動軸としてアウトリガ201を回動するアウトリガシリンダ206a、206bとを備えている。アウトリガ201は接地板208を有する。アウトリガ201が張り出されると、接地板208は地面の傾斜に追従して傾動しつつ接地する。
As shown in FIG. 2, the
図3を参照して、第1の実施の形態によるアウトリガ制御装置400について説明する。本実施の形態によるホイール式油圧ショベルでは、上述したように2つのアウトリガシリンダ206a、206bが設けられている。アウトリガシリンダ206a、206bは、たとえば、後左車輪、後右車輪に対応して配置され、電磁弁410、412および切換弁411によって、駆動制御される。
With reference to FIG. 3, the
アウトリガシリンダ206a、206bのボトム室206ab、206bbおよびロッド室206al、206blには、切換弁411を介して油圧ポンプ424の圧油が導入される。また、切換弁411を介してボトム室206ab、206bbおよびロッド室206al、206blから圧油がタンクへ排出される。切換弁411の切替えにより、油圧ポンプ424から吐出される圧油によりアウトリガシリンダ206a、206bが伸縮動作する。油圧ポンプ425の圧油は、電磁弁410または412を介して切換弁411に供給され、切換弁411を動作させる
Pressure oil from the
油圧センサ414は、ボトム室206ab、206bb内の圧油の圧力を検出する圧力センサ、油圧センサ415は、ロッド室206al,206bl内の圧力を検出する圧力センサである。油圧センサ414、415は、検出した圧力を示す信号をコントローラ401へ出力する。
The
電磁弁410、412と、油圧センサ414、415とは、コントローラ401に接続されている。コントローラ401には、操作部材430も接続され、操作部材430はアウトリガ制御信号をコントローラ401に供給する。コントローラ401は、アウトリガ制御信号と、アウトリガ201の駆動状態を示す油圧センサ414、415からの圧力信号とに基づいて、電磁弁410、412を制御する。
The
アウトリガシリンダ206a、206bを伸張させる場合には、コントローラ401は電磁弁410へ駆動信号を出力して電磁弁410を駆動させる。電磁弁410が駆動すると、油圧ポンプ425から供給された圧油により切換弁411が位置bに駆動されて、油圧ポンプ424の高圧の圧油がボトム室206ab、206bbへ流入するとともに、ロッド室206al、2063blの圧油がタンクへ排出される。その結果、アウトリガシリンダ206a、206bが伸張駆動する。
When the
アウトリガシリンダ206a、206bを収縮させる場合には、コントローラ401は電磁弁412へ駆動信号を出力して電磁弁412を駆動させる。電磁弁412が駆動すると、油圧ポンプ425から供給された圧油により切換弁411が位置Rに駆動されて、油圧ポンプ424の高圧の圧油がロッド室206al、206blへ流入するとともに、ボトム室206ab、206bbの圧油がタンクへ排出される。その結果、アウトリガシリンダ206a、206bが収縮駆動する。なお、位置Rにおいてボトム室206ab,206bbがタンクと連通する通路には絞りが介装されており、ジャッキアップ中に位置Rに切り替わったときに、車体がゆっくり降下して車輪120が接地するように構成されている。
When the
上述したように、コントローラ401には操作部材430も接続されている。操作部材430は、作業者がアウトリガ201の駆動状態を選択するための選択式スイッチ(たとえばダイヤル式スイッチ)である。図4に示すように、操作部材430は、「収納」、「接地」、「ジャッキアップ」および「OFF」の何れかに選択することができる。操作部材430は、作業者の選択操作に応じたアウトリガ操作を指示するアウトリガ制御信号、すなわちアウトリガ操作指示信号をコントローラ401へ出力する。
As described above, the
操作部材430により「OFF」が選択されると、コントローラ401は、駆動途中であってもアウトリガシリンダ206a、206bの駆動を停止させる。OFF以外の操作位置では、後述するように、操作部材430の操作位置によるアウトリガ操作指示信号と、アウトリガ201の駆動状態とに基づいて、コントローラ401は、アウトリガシリンダ206a,206bを駆動制御する。
When “OFF” is selected by the
コントローラ401は、油圧センサ414の出力、すなわちボトム室206ab、206bb内の圧力、および油圧センサ415の出力、すなわちロッド室206al,206bl内の圧力に基づいて、アウトリガシリンダ206a、206bの駆動状態を判別する。そして、コントローラ401は、判別したアウトリガシリンダ206a、206bの駆動状態と、操作部材430から入力したアウトリガ操作指示信号とに基づいて、アウトリガシリンダ206a、206bの駆動を伸張、収縮および非駆動のいずれかに設定する。そして、コントローラ401は、上述したように、設定した駆動が伸張の場合は電磁弁410を駆動し、収縮の場合は電磁弁412を駆動する。なお、非駆動に設定した場合には、コントローラ401は電磁弁410、412への駆動信号の出力を行わない。以下、コントローラ401がアウトリガシリンダ206a、206bの駆動を設定する処理(駆動設定処理)について詳細に説明する。
The
コントローラ401は、ボトム室206ab、206bbの圧力およびロッド室206al、206blの圧力に応じて、アウトリガシリンダ206a、206bの駆動状態を次のように判別する。すなわち、コントローラ401は、油圧センサ414、415の出力を予め設定された第1閾値および第2閾値(第2閾値>第1閾値)と比較することにより、次の(1)〜(5)の状態の何れかであることを判別する。
(1)収納状態
(2)接地状態
(3)ジャッキアップ状態
(4)接地状態から収納状態までの間の空中状態
(5)接地状態からジャッキアップ状態までの間の中間状態
The
(1) Storage state (2) Grounding state (3) Jack up state (4) Airborne state from ground state to storage state (5) Intermediate state between ground state and jack up state
(1)収納状態
収納状態時の圧力は次の通りである。アウトリガ201を収納する際には、アウトリガシリンダ206a,206bのロッド室206al,206blに圧油が供給されるので、アウトリガ201が完全に収納された収納状態のときにはロッド室206al,206blの圧力がポンプリリーフ圧PRに達する。なお、ポンプリリーフ圧力PRが上記の第2閾値である。したがって、収納状態においては、油圧センサ415により検出されるロッド室206al,206blの圧力は第2閾値以上(ポンプリリーフ圧力PR以上)となる。
(1) Storage state Pressure in the storage state is as follows. When the
(2)接地状態
接地状態時の圧力は次の通りである。収納状態のアウトリガ201を張り出すジャッキアップ動作をして接地状態となる場合、アウトリガ接地板208が地面に接地するまでボトム室206ab,206bbに圧油が供給されてアウトリガシリンダ206a,206bが伸長する。このときのボトム室206ab,206bbの圧力(ボトム圧)は、アウトリガ201をアウトリガシリンダ206a,206bが駆動するに必要な圧力PJ(<ポンプリリーフ圧力PR)である。なお、圧力PJが上記の第1閾値である。
(2) Grounding state The pressure in the grounding state is as follows. In the case where the
ジャッキアップ状態のアウトリガ201を収縮させて収納状態となる場合、ロッド室206al,206blを油圧ポンプ424に接続し、ボトム室206ab,206bをタンクへ接続することにより、アウトリガシリンダ206a,206bを収縮する。ジャッキアップ状態で切換弁411がR位置に切り換わると、ボトム室206ab,206bbが切換弁411の絞りを介してタンクへ接続され、接地板208が地面から離れるまで(接地状態)は車体自重によりアウトリガシリンダ206a,206bが収縮する。このときのロッド室206al,206blの圧力は上記の圧力PJ(第1閾値)となる。したがって、接地状態では、油圧センサ414により検出されるボトム室206ab,206bbの圧力は第1閾値未満または油圧センサ415により検出されるロッド室206al,206blの圧力が第1閾値未満となる。
When the
(3)ジャッキアップ状態
ジャッキアップ状態時の圧力は次の通りである。アウトリガ201をジャッキアップするとき、アウトリガシリンダ206a,206bのボトム室206ab,206bbに圧油が供給される。このため、アウトリガ201により油圧ショベルが完全にジャッキアップされると、すなわちジャッキアップ状態となると、ボトム室206ab,206bbの圧力がポンプリリーフ圧PR(第2閾値)に達する。したがって、ジャッキアップ状態で油圧センサ414により検出されるボトム室206ab,206bbの圧力は第2閾値以上(ポンプリリーフ圧力PR以上)となる。
(3) Jack-up state Pressure in the jack-up state is as follows. When jacking up the
(4)接地状態から収納状態までの空中状態
収納状態のアウトリガ201を張り出してジャッキアップ動作する場合の、接地状態から収納状態までの空中状態時の圧力変化は次のとおりである。
上述したように、ジャッキアップ操作時は、アウトリガ接地板208が地面に接地する接地状態となるまでボトム室206ab,206bbに圧油が供給されてアウトリガシリンダ206a,206bが伸長する。
(4) Airborne state from the grounded state to the stowed state The pressure change during the airborne state from the grounded state to the stowed state when the
As described above, during the jack-up operation, the pressure oil is supplied to the bottom chambers 206ab and 206bb and the
アウトリガ201を縮退させる場合の、接地状態から収納状態までの空中状態時の圧力変化は次のとおりである。
ジャッキアップ状態から収納状態へ動作するときは、ロッド室206al,206blを油圧ポンプ424に接続し、ボトム室206ab,206bをタンクへ接続することにより、アウトリガシリンダ206a,206bを収縮する。接地板208が地面から離れた後、すなわち接地状態から収納状態までの空中状態では、切換弁411を通ってロッド室206al,206blに導入されるポンプ424の圧油によりアウトリガ201が引き上げられる。したがって、油圧センサ415により検出されるロッド室206al,206blの圧力は、接地状態時の圧力である第1閾値から収納状態時の圧力である第2閾値まで上昇する。
When the
When operating from the jack-up state to the stowed state, the rod chambers 206al and 206bl are connected to the
(5)接地状態からジャッキアップ状態までの間の中間状態
アウトリガ201を張り出してジャッキアップ動作する場合の、接地状態からジャッキアップ状態までの空中状態時の圧力変化は次のとおりである。
ジャッキアップ操作時は、上述したように、まずアウトリガ接地板208が地面に接地する接地状態となるまでアウトリガシリンダ206a,206bが伸長し、ボトム圧が圧力PJ(第1閾値)となる。その後、接地板208が接地するとボトム圧がPJから上昇し、ジャッキアップが完了してジャッキアップ状態となるとボトム圧(ポンプ圧)はポンプリリーフ圧力PR(第2閾値)となる。
(5) Intermediate state from the grounding state to the jack-up state The pressure change in the air state from the grounding state to the jack-up state when the
During the jack-up operation, as described above, the
すなわち、アウトリガ201をジャッキアップするとき、アウトリガシリンダ206a,206bのボトム室206ab,206bbに圧油を供給するので、アウトリガ201により油圧ショベルが完全にジャッキアップされると、すなわちジャッキアップ状態となるとボトム室206ab,206bbの圧力がポンプリリーフ圧PRに達する。したがって、油圧センサ414により検出されるボトム室206ab,206bbの圧力は、接地状態からジャッキアップ状態までは、第1閾値である圧力PJから第2閾値である圧力PRまで上昇する。
That is, when jacking up the
アウトリガ201を縮退させる場合の、接地状態からジャッキアップ状態までの空中状態時の圧力変化は次のとおりである。
上述したように、ジャッキアップ状態から収納状態へ動作するときは、ロッド室206al,206blを油圧ポンプ424に接続し、ボトム室206ab,206bをタンクへ接続することにより、アウトリガシリンダ206a,206bを収縮する。ジャッキアップ状態で切換弁411がR位置に切り換わると、ボトム室206ab,206bbが切換弁411の絞りを介してタンクへ接続され、接地板208が地面から離れるまでは車体自重によりアウトリガシリンダ206a,206bが収縮する。
When the
As described above, when operating from the jack-up state to the retracted state, the rod chambers 206al and 206bl are connected to the
コントローラ401は、操作部材430がOFF位置からいずれかの操作位置に切換えられたときに、以下のようにアウトリガ201の駆動状態を判別する。
コントローラ401は、油圧センサ415の出力値が第2閾値以上(ポンプリリーフ圧力PR以上)の場合には、駆動状態を「(1)収納状態」と判別する。
コントローラ401は、油圧センサ414の出力値が第1閾値未満または油圧センサ415の出力値が第1閾値未満の場合には、駆動状態を「(2)接地状態」と判別する。
コントローラ401は、油圧センサ414の出力値が第2閾値以上(ポンプリリーフ圧力PR以上)の場合には、駆動状態を「(3)ジャッキアップ状態」と判別する。
コントローラ401は、油圧センサ415の出力値が第1閾値以上第2閾値未満の場合には、駆動状態を「(4)接地状態から収納状態までの間の空中状態」と判別する。
コントローラ401は、油圧センサ414の出力値が第1閾値以上第2閾値未満の場合には、駆動状態を「(5)接地状態からジャッキアップ状態までの間の中間状態」と判別する。
When the
When the output value of the
When the output value of the
When the output value of the
When the output value of the
When the output value of the
なお、「(4)接地状態から収納状態までの間の空中状態」、「(5)接地状態からジャッキアップ状態までの間の中間状態」は、前回操作時に次のような操作が行われることにより生じる。すなわち、収納が完了する収納状態前またはジャッキアップが完了するジャッキアップ状態前に操作部材430が「OFF」位置に切り替え操作されて、アウトリガシリンダ206a、206bが収納途中またはジャッキアップ途中で駆動を停止することにより生じる。
Note that “(4) Airborne state from grounding state to stowed state” and “(5) Intermediate state from grounding state to jack-up state” are the following operations performed during the previous operation. Caused by. That is, the operating
コントローラ401は、アウトリガシリンダ206a、206bの駆動状態を判別すると、操作部材430から入力したアウトリガ操作指示信号と、判別した駆動状態とを用いて、アウトリガシリンダ206a、206bの駆動を伸張、収縮および非駆動のいずれかに設定する。図5は、操作指示信号と、判別された駆動状態とによって設定されるアウトリガシリンダ206a、206bの駆動の種別((a)伸張、(b)収縮、(c)非駆動)を示す図である。
When the
図5に示すように、コントローラ401は、以下の場合に駆動の種別を(a)伸張に設定する。すなわち、操作部材430により「ジャッキアップ」が選択され、判別された駆動状態が「(1)収納状態」,「(2)接地状態」,「(4)接地状態から収納状態までの間の空中状態」,または「(5)接地状態からジャッキアップ状態までの間の中間状態」の場合である。あるいは、操作部材430により「接地」が選択され、判別された駆動状態が「(1)収納状態」または「(4)接地状態から収納状態までの間の空中状態」の場合である。
As shown in FIG. 5, the
コントローラ401は、以下の場合に駆動の種別を(b)収縮に設定する。すなわち、操作部材430により「収納」が選択され、判別された駆動状態が「(2)接地状態」,「(3)ジャッキアップ状態」,「(4)接地状態から収納状態までの間の空中状態」,または「(5)接地状態からジャッキアップ状態までの間の中間状態」の場合、もしくは操作部材430により「接地」が選択され、判別された駆動状態が「(3)ジャッキアップ状態」または「(5)接地状態からジャッキアップ状態までの間の中間状態」の場合である。
The
さらに、コントローラ401は、次の場合に駆動の種別を(c)非駆動に設定する。すなわち、操作部材430により「収納」が選択され、判別された駆動状態が「(1)収納状態」の場合,もしくは操作部材430により「接地」が選択され、判別された駆動状態が「(2)接地状態」の場合、もしくは操作部材430により「ジャッキアップ」が選択され、判別された駆動状態が「(3)ジャッキアップ状態」の場合である。
Furthermore, the
コントローラ401は、設定した駆動の種別が「(a)伸張」の場合には、上述したように、電磁弁410を駆動して、ボトム室206ab、206bbに圧油を供給し、ロッド室206al,206blから圧油をタンクへ排出する。操作部材430により「ジャッキアップ」が選択されている場合には、コントローラ401は、油圧センサ414の出力値、すなわちボトム室206ab、206bb内の圧力が第2閾値以上になると、ボトム室206ab、206bbへの圧油の供給を停止する。すなわち、コントローラ401は、電磁弁410への駆動信号の出力を停止する。その結果、アウトリガシリンダ206a、206bがジャッキアップ状態まで駆動して停止する。
When the set drive type is “(a) extension”, the
設定した駆動の種別が「(a)伸張」の場合であって、操作部材430により「接地」が選択されている場合には、コントローラ401は、油圧センサ414の出力値が第1閾値を越えると、電磁弁410の駆動により切換弁411が中立位置に切り換わり、ボトム室206ab、206bbへの圧油の供給を停止する。その結果、アウトリガシリンダ206a、206bが接地で停止する。
When the set drive type is “(a) extension” and “ground” is selected by the
コントローラ401は、設定した駆動の種別が「(b)収縮」の場合には、上述したように、電磁弁412の駆動により切換弁411がR位置に切換わり、圧油がロッド室206al、206blに供給される。操作部材430により「収納」が選択されている場合には、コントローラ401は、油圧センサ415の出力値、すなわちロッド室206al、206bl内の圧力が第2閾値以上になると、ロッド室206al、206blへの圧油の供給を停止する。すなわち、コントローラ401は、電磁弁412への駆動信号の出力を停止する。その結果、アウトリガシリンダ206a、206bが収納状態まで駆動して停止する。
When the set drive type is “(b) contraction”, the
設定した駆動の種別が「(b)収縮」の場合であって、操作部材430により「接地」が選択されている場合には、コントローラ401は、油圧センサ415の出力値が第1閾値未満になると、ロッド室206al、206blへの圧油の供給を停止する。その結果、アウトリガシリンダ206a、206bが接地位置まで駆動して停止して接地状態となる。
When the set drive type is “(b) contraction” and “grounding” is selected by the
コントローラ401は、設定した駆動の種別が「(c)非駆動」の場合には、電磁弁410、412への駆動信号の出力を行わない。また、アウトリガシリンダ206a、206bが伸張または収縮駆動中であっても、操作部材430から「OFF」を示すアウトリガ操作指示信号が入力された場合には、コントローラ401は、電磁弁410、412への駆動信号の出力を停止する。
When the set drive type is “(c) non-drive”, the
図6に示すフローチャートを参照しながら、第1の実施の形態によるアウトリガ制御装置201の動作について説明する。図6の処理はコントローラ401でプログラムを実行して行われる。このプログラムは、メモリ(不図示)に格納されており、作業者により操作部材430が「OFF」から「接地」、「収納」および「伸張」のいずれかに設定され、アウトリガ操作指示信号が入力されるとコントローラ401により起動され、実行される。
The operation of the
ステップS1では、油圧センサ414,415からの出力値を入力して、ボトム室206ab、206bb内の圧力およびロッド室206al、206bl内の圧力を検出してステップS2へ進む。ステップS2においては、ステップS1で検出した圧力に基づいて、アウトリガシリンダ206a、206bの駆動状態を上述した(1)〜(5)の何れであるかを判別してステップS3へ進む。
In step S1, the output values from the
ステップS3では、操作部材430から入力したアウトリガ操作指示信号に基づいて、選択された操作指示が「収納」,「接地」および「ジャッキアップ」のいずれであるかを判定し、ステップS4へ進む。ステップS4では、判別した駆動状態と、アウトリガ操作指示信号とに基づいて、駆動の種別を設定してステップS5へ進む。
In step S3, based on the outrigger operation instruction signal input from the
ステップS5においては、ステップS4で設定した駆動の種別が「(a)伸張」であるか否かを判定する。「(a)伸張」の場合には、ステップS5が肯定判定されてステップS6へ進む。駆動の種別が「(b)収縮」または「(c)非駆動」の場合には、ステップS5が否定判定されて、後述するステップS12へ進む。 In step S5, it is determined whether or not the drive type set in step S4 is “(a) expansion”. In the case of “(a) extension”, an affirmative determination is made in step S5 and the process proceeds to step S6. If the drive type is “(b) contraction” or “(c) non-drive”, a negative determination is made in step S5, and the process proceeds to step S12 described later.
ステップS6においては、電磁弁410を駆動させ、切換弁411をb位置に切り換えてボトム室206ab、206bbに圧油を供給してステップS7に進む。ステップS7では、操作部材430がOFFに設定されたか判定し、否定判定されるとステップS8へ進む。ステップS8では、ステップS3で判定した操作指示が接地か否かを判定する。操作部材430から入力したアウトリガ操作指示信号が「接地」を示す場合には、ステップS8が肯定判定されてステップS9へ進む。アウトリガ操作指示信号が「ジャッキアップ」を示す場合には、ステップS8が否定判定されて後述するステップS11へ進む。
In step S6, the
ステップS9においては、油圧センサ414の出力値が第1閾値未満か否かを判定する。油圧センサ414に出力値、すなわちボトム室206ab、206bb内の圧力が第1閾値未満の場合には、ステップS9が肯定判定されてステップS10へ進む。ステップS10では、電磁弁410への駆動信号の出力を停止することによりボトム室206ab、206bbへの圧油の供給を停止して処理を終了する。油圧センサ414の出力値が第1閾値以上の場合には、ステップS7に戻り、上記ステップS7〜S9の判定処理を繰り返す。
なお、ステップS7が肯定されるとステップS8,S9スキップしてステップS10に進む。
In step S9, it is determined whether the output value of the
If step S7 is affirmed, steps S8 and S9 are skipped and the process proceeds to step S10.
ステップS8が否定判定された場合(ジャッキアップ判定)にはステップS11へ進む。ステップS11では、油圧センサ414の出力値が第2閾値以上か否かを判定する。油圧センサ414からの出力値が第2閾値以上の場合には、ステップS11が肯定判定されてステップS10へ進む。ステップS10では、電磁弁410への駆動信号の出力を停止することによりボトム室206ab、206bbへの圧油の供給を停止して処理を終了する。油圧センサ414の出力値が第2閾値未満の場合には、ステップS7に戻り、上記ステップS7〜S9の判定処理を繰り返す。
If a negative determination is made in step S8 (jack-up determination), the process proceeds to step S11. In step S11, it is determined whether or not the output value of the
駆動の種別が「(b)収縮」または「(c)非駆動」に設定された場合には、ステップS5が否定判定されてステップS12に進み、駆動の種別が「(b)収縮」であるか否かを判定する。「(b)収縮」の場合にはステップS12が肯定判定されてステップS13へ進む。「(c)非駆動」の場合にはステップS12が否定判定されてステップS1へ戻る。 If the drive type is set to “(b) contraction” or “(c) non-drive”, a negative determination is made in step S5 to proceed to step S12, and the drive type is “(b) contraction”. It is determined whether or not. In the case of “(b) contraction”, an affirmative determination is made in step S12 and the process proceeds to step S13. In the case of “(c) non-driven”, a negative determination is made in step S12 and the process returns to step S1.
ステップS13は、電磁弁412を駆動させ、切換弁411をR位置へ切り換えて圧油をロッド室206al、206blに供給してステップS14に進む。ステップS14では、操作部材430がOFFに設定されたか判定し、否定判定されるとステップS15へ進む。ステップS15においては、ステップS3で判定した操作指示が接地か否かを判定する。操作部材430から入力したアウトリガ操作指示信号が「接地」を示す場合には、ステップS15が肯定判定されてステップS16へ進む。アウトリガ操作指示信号が「収納」を示す場合には、ステップS15が否定判定されて後述するステップS18へ進む。
In step S13, the
ステップS16においては、油圧センサ415の出力値が第1閾値未満か否かを判定する。油圧センサ415の出力値、すなわちロッド室206al、206bl内の圧力が第1閾値未満の場合には、ステップS16が肯定判定されてステップS17へ進む。ステップS17では、電磁弁412への駆動信号の出力を停止することによりロッド室206al、206blへの圧油の供給を停止して処理を終了する。油圧センサ415の出力値が第1閾値以上の場合には、ステップS16が否定判定されて、ステップS14に戻り、上記ステップS14〜S16の判定処理を繰り返す。
なお、ステップS14が肯定されるとステップS15,S16をスキップしてステップS17に進む。
In step S16, it is determined whether the output value of the
If step S14 is positive, steps S15 and S16 are skipped and the process proceeds to step S17.
ステップS15が否定判定された場合にはステップS18へ進む。ステップS18では、油圧センサ415の出力値が第2閾値以上か否かを判定する。油圧センサ415の出力値が第2閾値以上の場合には、ステップS18が肯定判定されてステップS17へ進む。ステップS17では、電磁弁412への駆動信号の出力を停止することによりロッド室206al、206blへの圧油の供給を停止して処理を終了する。油圧センサ415の出力値が第2閾値未満の場合には、ステップS18が否定判定されて、ステップS14に戻り、上記ステップS14,S15,S18の判定処理を繰り返す。
If a negative determination is made in step S15, the process proceeds to step S18. In step S18, it is determined whether or not the output value of the
以上で説明した第1の実施の形態によるアウトリガ制御装置201によれば、以下の作用効果が得られる。
コントローラ401は、アウトリガ201の姿勢を指示するための操作指示を検出する。アウトリガシリンダ206a,206bは、アウトリガ201を、収納と接地とジャッキアップとの間で駆動させる。油圧ポンプ424はアウトリガシリンダ206a,206bに圧油を供給する。油圧センサ414,415はアウトリガシリンダ206a,206bに供給された圧油によってアウトリガシリンダ206a,206bに働く負荷を検出する。コントローラ401は、検出された負荷に基づいて、アウトリガ201の現在の駆動状態が、収納状態と、接地状態と、ジャッキアップ状態と、収納状態と接地状態との間の空中状態と、ジャッキアップ状態と接地状態との間の中間状態とのうちの何れかの状態であることを検出し、検出された現在の駆動状態と、検出された操作指示とにより、アウトリガシリンダ206a,206bの駆動の種別を設定する。そして、コントローラ401は、設定された駆動の種別に応じて、油圧ポンプ424から圧油をアウトリガシリンダ206a,206bに供給し、アウトリガシリンダ206a,206bに働く負荷が駆動の種別に応じた負荷になると油圧ポンプ424からの圧油の供給を停止するようにした。
したがって、前回駆動時に、アウトリガシリンダ206a,206bが接地状態から収納状態までの間の空中状態や、接地状態からジャッキアップ状態までの間の中間状態で停止している場合であっても、作業者の操作部材430の操作に応じてアウトリガシリンダ206a,206bを駆動することができる。
According to the
The
Therefore, even when the
以上で説明した第1の実施の形態によるアウトリガ制御装置201を、次のように変形できる。
操作部材430による選択式入力に「OFF」を含まないものでもよい。この場合、エンジン停止の場合に、本実施の形態において操作部材430から「OFF」が選択入力された場合と同様の動作となる。したがって、エンジン停止時にアウトリガシリンダ206a、206bの収納完了前またはジャッキアップ完了前の場合に、上述した「(4)接地状態から収納状態までの間の空中状態」、「(5)接地状態からジャッキアップ状態までの間の中間状態」が生じることになる。そして、コントローラ401は、エンジン起動時に図6のフローチャートの処理を開始すればよい。
The
The selection type input by the
−第2の実施の形態−
図7,図8を参照して、本発明の第2の実施の形態によるアウトリガ制御装置を説明する。以下の説明では、第1の実施の形態と同じ構成要素には同じ符号を付して相違点を主に説明する。特に説明しない点については、第1の実施の形態と同じである。本実施の形態では、操作部材により選択式に操作入力を行うものに代えて連続的に操作入力を行う点で、第1の実施の形態と異なる。
-Second Embodiment-
The outrigger control device according to the second embodiment of the present invention will be described with reference to FIGS. In the following description, the same components as those in the first embodiment are denoted by the same reference numerals, and different points will be mainly described. Points that are not particularly described are the same as those in the first embodiment. This embodiment is different from the first embodiment in that the operation input is continuously performed instead of the operation input that is selectively performed by the operation member.
図7は、第2の実施の形態における操作部材430を上部から見た場合の模式的に示す。本実施の形態における操作部材430は、いわゆるジョイスティックによって構成されている。作業者は、操作部材430を、たとえば前後方向(図7の上下方向)に操作することにより「収納」または「ジャッキアップ」を入力できる。図7に示す位置P1が操作部材430の初期位置である。
FIG. 7 schematically illustrates the
図7は、作業者が操作部材430を後方、すなわち位置P3の方向に操作することによって「収納」を入力できる例を示している。そして、本実施の形態においては、操作部材430の位置P1から位置P3までの操作量に応じて、アウトリガシリンダ206a、206bの収納速度を制御可能に構成されている。すなわち、操作部材430の操作量が大きく位置P3の近傍付近まで操作される程、コントローラ401は収納速度が高速となるように制御する。換言すると、収納に関する操作が操作部材430により連続的に入力可能な構成となっている。
FIG. 7 shows an example in which the operator can input “storage” by operating the
作業者は操作部材430を前方、すなわち位置P2の方向に操作することによって「ジャッキアップ」を入力できる。そして、「収納」の場合と同様に、操作部材430の位置P1から位置P2までの操作量に応じて、アウトリガシリンダ206a、206bのジャッキアップ速度を制御可能に構成されている。すなわち、操作部材430の操作量が大きく位置P3の近傍付近まで操作される程、コントローラ401はジャッキアップ速度が高速となるように制御する。換言すると、ジャッキアップに関する操作が操作部材430により連続的に入力可能な構成となっている。
The operator can input “jack up” by operating the
作業者は、操作部材430をたとえば右方向の位置P4に操作することにより「接地」を入力できる。なお、アウトリガシリンダ206a、206bの接地速度については、操作部材430の操作量に応じて制御可能な構成ではないものとする。
The operator can input “grounding” by operating the
図8に第2の実施の形態によるアウトリガ制御装置400Aについて説明する。操作部材430は、たとえばポテンショメータ等により構成された角度検出器210に接続されている。角度検出器210は、作業者による操作部材430の操作方向と操作量とを検出する。そして、角度検出器210は、「収納」、「接地」および「ジャッキアップ」の何れかを指示するアウトリガ操作指示信号と、「収納」または「ジャッキアップ」の駆動指示を行う場合には操作量を示す操作量信号とをコントローラ401へ出力する。
FIG. 8 illustrates an
コントローラ401は、操作量信号を入力した場合には、油圧ポンプ424を制御して、操作量信号が示す操作量に応じて予め設定されている吐出量で圧油を吐出させる。すなわち、操作部材430の操作量が大きい程、油圧ポンプ424からの圧油の吐出量が大きくなるように設定されている。その結果、操作部材430の操作量に応じて、アウトリガシリンダ206a、206bの収納速度およびジャッキアップ速度を制御することができる。
When the operation amount signal is input, the
以上で説明した第2の実施の形態によれば、第1の実施の形態により得られる作用効果に加えて、次の作用効果が得られる。
操作部材430は、「収納」および「ジャッキアップ」方向へ操作する場合、操作指示を連続的に出力し、角度検出器210は、操作部材430により連続的に入力された操作指示の操作量を検出する。コントローラ401は、検出された操作量に応じてアウトリガシリンダ206a、206bの駆動速度が変更可能となるように、油圧ポンプ424からアウトリガシリンダ206a、206bへの圧油の供給量を制御するようにした。したがって、作業者が所望する速度によりアウトリガシリンダ206a、206bの駆動速度が変更できるので、作業効率を向上させることができる。
According to the second embodiment described above, in addition to the functions and effects obtained by the first embodiment, the following functions and effects are obtained.
When the
第1および第2の実施の形態においては、アウトリガ201を備えるホイール式油圧ショベルを例として説明したが、アウトリガ201に代えてブレードを備えるものであってもよい。また、ホイール式油圧ショベルを例に挙げて説明したが、ホイールローダ、トラッククレーン等の建設機械、その他の作業車両、アウトリガ201を備える産業車両にも本発明を適用できる。さらに、大型クレーンのジャッキアップ用シリンダ、サイドフレーム伸縮用シリンダ等、アウトリガ以外の装置のシリンダにも適用できる。
In the first and second embodiments, the wheel-type hydraulic excavator provided with the
油圧センサ414、415の出力値である圧力と上記の第1および第2閾値とを比較するものに代えて、油圧センサ414、415の出力値の微分値または積分値と第1および第2閾値とを比較するものでもよい。
Instead of comparing the pressure, which is the output value of the
また、本発明の特徴を損なわない限り、本発明は上記実施の形態に限定されるものではなく、本発明の技術的思想の範囲内で考えられるその他の形態についても、本発明の範囲内に含まれる。説明に用いた実施の形態および変形例は、それぞれを適宜組合わせて構成しても構わない。 In addition, the present invention is not limited to the above-described embodiment as long as the characteristics of the present invention are not impaired, and other forms conceivable within the scope of the technical idea of the present invention are also within the scope of the present invention. included. The embodiments and modifications used in the description may be configured by appropriately combining them.
200 アウトリガ装置、 201 アウトリガ、
400,400A アウトリガ制御装置、
206a、206b アウトリガシリンダ、 210 角度検出器、
401 コントローラ、 414,415 油圧センサ、
424 油圧ポンプ、 430 操作部材
200 outrigger device, 201 outrigger,
400, 400A outrigger control device,
206a, 206b, outrigger cylinder, 210 angle detector,
401 controller, 414, 415 hydraulic sensor,
424 hydraulic pump, 430 operation member
Claims (5)
前記アウトリガが少なくとも収納状態、ジャッキアップ状態、および接地状態のいずれかの状態になるように指示する指示手段と、
前記アウトリガシリンダに働く負荷を検出する負荷検出手段と、
前記負荷検出手段により検出された負荷に基づいて、前記アウトリガの状態を検出する検出手段と、
前記指示手段による操作指示と、前記検出手段により検出された前記アウトリガの状態とに基づいて、前記アウトリガが前記指示手段で指示された状態となるように、前記アウトリガシリンダに対する圧油の給排を制御する制御手段とを備えることを特徴とするアウトリガ制御装置。 An outrigger cylinder that drives the outrigger by pressure oil discharged from a hydraulic pump;
Instruction means for instructing the outrigger to be in at least one of a stowed state, a jack-up state, and a grounding state;
Load detecting means for detecting a load acting on the outrigger cylinder;
Detection means for detecting the state of the outrigger based on the load detected by the load detection means;
Based on the operation instruction by the instruction means and the state of the outrigger detected by the detection means, supply and discharge of pressure oil to and from the outrigger cylinder is performed so that the outrigger is in the state instructed by the instruction means. An outrigger control device comprising a control means for controlling.
前記制御手段は、前記アウトリガシリンダの駆動の種別を決定し、前記決定した駆動の種別に基づいて、前記アウトリガが前記指示手段で指示された状態となるように、前記アウトリガシリンダに対する圧油の給排を制御することを特徴とするアウトリガ制御装置。 In the outrigger control device according to claim 1,
The control means determines a drive type of the outrigger cylinder, and supplies pressure oil to the outrigger cylinder so that the outrigger is in a state instructed by the instruction means based on the determined drive type. An outrigger control device that controls exhaust.
前記制御手段は、前記アウトリガシリンダに働く負荷が前記駆動の種別に応じた負荷になると前記アウトリガシリンダに対する圧油の給排を停止させることを特徴とするアウトリガ制御装置。 The outrigger control device according to claim 2,
The outrigger control device, wherein the control means stops supply and discharge of pressure oil to and from the outrigger cylinder when a load acting on the outrigger cylinder becomes a load corresponding to the type of drive.
前記指示手段による操作指示は、収納指示と、接地指示と、ジャッキアップ指示とを含み、
前記検出手段により検出される駆動状態は、前記アウトリガが収納されている収納状態、接地されている接地状態、ジャッキアップされているジャッキアップ状態、収納状態と接地状態との間の空中状態、およびジャッキアップ状態と接地状態との間の中間状態を含み、
前記制御手段は、
(a)前記指示手段による操作指示が収納指示であるときに前記検出手段が収納状態を検出しているとき、前記指示手段による操作指示が接地指示であるときに前記検出手段が接地状態を検出しているとき、前記指示手段による操作指示がジャッキアップ指示であるときに前記検出手段がジャッキアップ状態を検出しているときには、それぞれ前記アウトリガシリンダへの給排を行わず、
(b)前記指示手段による操作指示が収納指示であるときに前記検出手段が収納状態以外を検出しているときには、前記アウトリガが収納状態となるように前記アウトリガシリンダへの給排を制御し、
(c)前記指示手段による操作指示が接地指示であるときに前記検出手段が接地状態以外を検出しているときには、前記アウトリガが接地状態となるように前記アウトリガシリンダへの給排を制御し、
(d)前記指示手段による操作指示がジャッキアップ指示であるときに前記検出手段がジャッキアップ状態以外を検出しているときには、前記アウトリガがジャッキアップ状態となるように前記アウトリガシリンダへの給排を制御することを特徴とするアウトリガ制御装置。 In the outrigger control device according to claim 1,
The operation instruction by the instruction means includes a storage instruction, a grounding instruction, and a jack-up instruction,
The drive state detected by the detection means includes a storage state in which the outrigger is stored, a grounded state in which the outrigger is grounded, a jack-up state in which the jack is up, an aerial state between the stored state and the ground state, and Including the intermediate state between the jack-up state and the ground state,
The control means includes
(A) When the operation instruction by the instruction means is a storage instruction, the detection means detects the storage state, and when the operation instruction by the instruction means is a ground instruction, the detection means detects the ground state When the detection means detects the jack-up state when the operation instruction by the instruction means is a jack-up instruction, the supply and discharge to the outrigger cylinder is not performed,
(B) When the operation means by the instruction means is a storage instruction, when the detection means detects a state other than the storage state, the supply / exhaust to the outrigger cylinder is controlled so that the outrigger is in the storage state,
(C) When the operation means by the instruction means is a grounding instruction, when the detection means detects a state other than the grounding state, the supply / exhaust to the outrigger cylinder is controlled so that the outrigger is in the grounding state;
(D) When the operation means by the instruction means is a jack-up instruction, when the detection means detects a state other than a jack-up state, supply / discharge to the outrigger cylinder is performed so that the outrigger is in the jack-up state. An outrigger controller characterized by controlling.
前記指示手段による操作指示には、前記アウトリガシリンダの速度指示も含み、
前記制御手段は、前記アウトリガシリンダの駆動速度が前記速度指示に応じた速度となるよう、前記アウトリガシリンダに対する圧油の給排量を制御することを特徴とするアウトリガ制御装置。 The outrigger control device according to any one of claims 1 to 4,
The operation instruction by the instruction means includes a speed instruction of the outrigger cylinder,
The outrigger control device, wherein the control means controls the supply / discharge amount of pressure oil to and from the outrigger cylinder so that the driving speed of the outrigger cylinder becomes a speed according to the speed instruction.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011010433A JP2012148724A (en) | 2011-01-21 | 2011-01-21 | Outrigger control device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011010433A JP2012148724A (en) | 2011-01-21 | 2011-01-21 | Outrigger control device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012148724A true JP2012148724A (en) | 2012-08-09 |
Family
ID=46791432
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011010433A Pending JP2012148724A (en) | 2011-01-21 | 2011-01-21 | Outrigger control device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012148724A (en) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103086289A (en) * | 2013-02-05 | 2013-05-08 | 中联重科股份有限公司 | Method, device and system for controlling extension speed of support oil cylinder and crane |
| CN104044561A (en) * | 2014-06-24 | 2014-09-17 | 中联重科股份有限公司 | Control system, method and device for adjusting supporting legs of engineering vehicle and engineering vehicle |
| JP2016003481A (en) * | 2014-06-17 | 2016-01-12 | 日立建機株式会社 | Wheel-type work vehicle |
| JP2016188564A (en) * | 2015-03-27 | 2016-11-04 | 日本車輌製造株式会社 | Construction machine |
| JP2019120012A (en) * | 2017-12-28 | 2019-07-22 | 日立建機株式会社 | Work vehicle |
| JP2020073768A (en) * | 2014-01-13 | 2020-05-14 | ジェイ. シー. バンフォード エクスカヴェイターズ リミテッドJ.C. Bamford Excavators Limited | Method of operating cargo handling and transport machine |
| CN112196865A (en) * | 2020-09-30 | 2021-01-08 | 三一汽车制造有限公司 | Control method for support leg of working machine and working machine |
-
2011
- 2011-01-21 JP JP2011010433A patent/JP2012148724A/en active Pending
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103086289A (en) * | 2013-02-05 | 2013-05-08 | 中联重科股份有限公司 | Method, device and system for controlling extension speed of support oil cylinder and crane |
| JP2020073768A (en) * | 2014-01-13 | 2020-05-14 | ジェイ. シー. バンフォード エクスカヴェイターズ リミテッドJ.C. Bamford Excavators Limited | Method of operating cargo handling and transport machine |
| JP2016003481A (en) * | 2014-06-17 | 2016-01-12 | 日立建機株式会社 | Wheel-type work vehicle |
| CN104044561A (en) * | 2014-06-24 | 2014-09-17 | 中联重科股份有限公司 | Control system, method and device for adjusting supporting legs of engineering vehicle and engineering vehicle |
| JP2016188564A (en) * | 2015-03-27 | 2016-11-04 | 日本車輌製造株式会社 | Construction machine |
| JP2021006698A (en) * | 2015-03-27 | 2021-01-21 | 日本車輌製造株式会社 | Pile driver, and method of using pile driver |
| JP2019120012A (en) * | 2017-12-28 | 2019-07-22 | 日立建機株式会社 | Work vehicle |
| CN112196865A (en) * | 2020-09-30 | 2021-01-08 | 三一汽车制造有限公司 | Control method for support leg of working machine and working machine |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2012148724A (en) | Outrigger control device | |
| JP6163082B2 (en) | Wheel loader | |
| JP4917617B2 (en) | Transport vehicle | |
| AU2010214533B2 (en) | Transporter vehicle | |
| JP5048068B2 (en) | Work vehicle and hydraulic control method for work vehicle | |
| JP5228132B1 (en) | Wheel loader | |
| AU2012337961B2 (en) | Conveyance vehicle | |
| JP5591104B2 (en) | Work vehicle, work vehicle control device, and working vehicle hydraulic oil amount control method | |
| JP4933478B2 (en) | Transport vehicle | |
| US11879234B2 (en) | Work vehicle | |
| US9702117B2 (en) | Work vehicle control method, work vehicle control device, and work vehicle | |
| JP2011085159A (en) | Hydraulic driving device of working machine | |
| CN107923152B (en) | Hydraulic system and method for moving an implement of a work machine | |
| WO2022190650A1 (en) | Construction machine | |
| JP2014167334A (en) | Hydraulic circuit of construction machine and its control method | |
| US9809948B2 (en) | Work vehicle control method, work vehicle control device, and work vehicle | |
| US10358798B2 (en) | Work vehicle and method of controlling operation | |
| JP6433932B2 (en) | Dump truck body lifting assist control system | |
| JP2011245909A (en) | Outrigger control device | |
| JP6928161B2 (en) | Work vehicle and control method of work vehicle | |
| US20190003494A1 (en) | Hydraulic driving device for cargo handling vehicle | |
| JP4478538B2 (en) | Capacity control method and capacity control device of hydraulic pump for work machine of work vehicle | |
| JP2008115923A (en) | Control device of working machine | |
| JP4183722B2 (en) | Control device for hydraulic pump for work machine of work vehicle | |
| JP3703245B2 (en) | Jacking cylinder control device for work vehicle having outrigger |