JP2012146040A - Detecting system of abnormal situation - Google Patents
Detecting system of abnormal situation Download PDFInfo
- Publication number
- JP2012146040A JP2012146040A JP2011002628A JP2011002628A JP2012146040A JP 2012146040 A JP2012146040 A JP 2012146040A JP 2011002628 A JP2011002628 A JP 2011002628A JP 2011002628 A JP2011002628 A JP 2011002628A JP 2012146040 A JP2012146040 A JP 2012146040A
- Authority
- JP
- Japan
- Prior art keywords
- space
- unit
- abnormal situation
- vector
- time
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Abstract
Description
本発明はカメラなどのセンサ情報を基に異常事態を発見するシステムにおいて、生物の注意機能を模したモデルに基づいて異常事態の候補を絞り込む異常事態の検出システムに関する。 The present invention relates to an abnormal situation detection system that narrows down abnormal situation candidates based on a model simulating a biological attention function in a system that detects abnormal situations based on sensor information such as a camera.
安全に安心して暮らせる街づくりに向けて、犯罪を未然に防止するための監視システム及び子供や高齢者のための見守りシステムの実現が望まれている。現状では監視カメラのモニタリングはほとんどが人手によるもので、肉体的・精神的にも大きな負担を強いられている。そのため、自動化が強く望まれている。 In order to create a city where people can live safely and securely, it is desired to realize a monitoring system for preventing crimes and a monitoring system for children and the elderly. At present, surveillance cameras are mostly manually monitored, and are physically and mentally burdensome. Therefore, automation is strongly desired.
監視カメラのモニタリングを自動化するための技術として、監視カメラで撮影される画像を処理して人間が異常の有無を判断するべき画像を自動的に選別するシステムが提案されている(例えば、特許文献1参照。)。また、フレーム間差分データに基づいて動画像から異常動作を検出する装置および方法が提案されている(例えば、特許文献2参照。)。 As a technique for automating monitoring of a surveillance camera, a system has been proposed in which an image photographed by a surveillance camera is processed to automatically select an image on which a human should determine whether or not there is an abnormality (for example, patent document). 1). In addition, an apparatus and a method for detecting an abnormal operation from a moving image based on inter-frame difference data have been proposed (see, for example, Patent Document 2).
さらに、生物の注意機能を模したモデルとして、画像から顕著性を算出する方法(例えば、非特許文献1参照。)や、視覚体験の効果を取り入れて画像から顕著性を算出する方法(例えば、特許文献3、非特許文献2参照。)が提案されている。
Furthermore, as a model that mimics the attention function of a living organism, a method of calculating saliency from an image (for example, see Non-Patent Document 1), or a method of calculating saliency from an image by incorporating the effects of visual experience (for example, (See
特許文献1に開示されている発明では、監視カメラで撮影された画像を処理してそれが予め定義しておいたどのクラスに属するかの判断を試み、その際にあいまいさが残る時に人間に判断を求めている。この方法は予め生じうる事態をいくつかのクラスに分類し、それぞれ予め定義しておく必要があるが、それが可能であるのは、ATMや駐車場など予め起こりうる状況が予想できる場合に限られるという問題がある。
In the invention disclosed in
特許文献2に開示されている発明では、フレーム間差分データの特徴が正常な状態の特徴と乖離しているときに異常と判断するようにしているが、画像のどの場所において異常が発生したかは判断していない。そのため、画像の一部でだけ異常が発生した時は異常の程度が相対的に小さいために見逃す可能性が高いという問題がある。
In the invention disclosed in
人間をはじめとする生物の視覚系には注意と呼ばれる機能がある。目に入力される情報の全てを一様に処理するのではなく、特定の対象に注意を集中し、その部分を重点的に処理している。それによって、迅速に危険を察知し、適切な対応を採ることが可能となっている。 The visual system of living organisms including humans has a function called attention. Instead of processing all the information input to the eyes uniformly, attention is focused on a specific object, and that part is processed with priority. As a result, it is possible to quickly detect danger and take appropriate measures.
生物の視覚系が持つ注意の機能を模することによって監視システムに類似の注意の機能を持たせれば、異常事態の候補を適切に抽出することが可能になるかも知れない。そのためには、生物の視覚系の注意の機能を工学的にモデル化する必要がある。そのような試みの例として、特許文献3、非特許文献1、非特許文献2において画像各部の顕著性を算出する方法が開示されている。顕著性は周囲と比べて色が異なっているなど際立っている度合いを表し、顕著性が高い部分は注意をひき易いとしている。このモデルを利用すれば顕著性が高い部分を異常事態の候補として検出できる。しかし、この方法はそれぞれの瞬間において、その時刻における顕著性を検出しているため、時間の経過を見て初めて判断されるような異常事態の候補を検出できないという問題がある。
If the surveillance system has a similar attention function by imitating the attention function of the biological visual system, it may be possible to appropriately extract candidates for abnormal situations. For this purpose, it is necessary to engineer the attention function of the visual system of living organisms. As an example of such an attempt,
本発明は、生物の注意機能を模した顕著性算出のモデルに基づいて異常事態の候補を絞り込む異常事態検出システムを提供することを目的とするものであり、各時空点に対応する値をもつ時空間データを入力する入力部と、所定の多数の時空点において時空間データの特徴を表すベクトルを抽出する特徴抽出部と、抽出されたベクトルの特徴の統計量を算出する特徴解析部と、特徴抽出部の結果と特徴解析部の結果に基づいて所定の多数の時空点における顕著性を算出する顕著性算出部を備えることにより、前記の課題を解決したものである。 An object of the present invention is to provide an abnormal situation detection system that narrows down candidates for an abnormal situation based on a saliency calculation model simulating a biological attention function, and has a value corresponding to each space-time point. An input unit for inputting spatio-temporal data; a feature extraction unit for extracting a vector representing features of the spatio-temporal data at a predetermined number of spatio-temporal points; a feature analysis unit for calculating a statistic of the extracted vector features; By providing a saliency calculating unit that calculates saliency at a predetermined number of space-time points based on the result of the feature extracting unit and the result of the feature analyzing unit, the above problem is solved.
本発明は、さらに、顕著性算出部の結果に基づいて異常事態が発生している可能性が大きい時空点の候補を検出する異常事態候補検出部を備えることもできる。 The present invention may further include an abnormal situation candidate detection unit that detects space-time point candidates that are highly likely to have an abnormal situation based on the result of the saliency calculation section.
本発明によれば、ATMや駐車場など予め起こりうる状況が予想できる場合に限られることなく、異常事態の可能性の指標として顕著性を算出することができ、あるいは、異常事態の可能性が高い時点と場所の候補を検出することができる。異常事態が起こった場所も特定できるので、異常事態が狭い領域に限られていても見逃す可能性が小さいという効果がある。また、それぞれの瞬間における顕著性ではなく時間空間のある領域の特徴に基づいて顕著性を算出するので、時間の経過を見て初めて判断されるような異常事態の候補を検出できるという効果がある。 According to the present invention, the saliency can be calculated as an index of the possibility of an abnormal situation without being limited to the case where a situation that can occur in advance such as an ATM or a parking lot can be predicted. Can detect high time and place candidates. Since the place where the abnormal situation has occurred can be specified, there is an effect that the possibility of overlooking is small even if the abnormal situation is limited to a narrow area. In addition, since the saliency is calculated based on the characteristics of a certain area in the time space rather than the saliency at each moment, there is an effect that it is possible to detect a candidate for an abnormal situation that can be determined only after the passage of time. .
(実施例1)
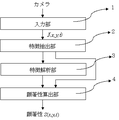
本発明は、生物の注意機能を模したモデルに基づいて異常事態の候補を絞り込む異常事態の検出システムである。ここで、本明細書における異常事態とは、「正常動作ではないもの」をいう。正常動作とは、動作特徴の統計的な分布を考えた場合に分布の集中する、統計的な分布から学習可能な動作をいう。そして、その分布から大きく逸脱する動作を異常動作とする。以下、本発明に係る異常事態の候補検出システムを図面を用いて説明する。本発明の第1の実施例の構成を図1に示す。本実施例の検出システムは入力部(1)、特徴抽出部(2)、特徴解析部(3)、顕著性算出部(4)から成る。
Example 1
The present invention is an abnormal situation detection system that narrows down abnormal situation candidates based on a model simulating a biological attention function. Here, the abnormal situation in this specification refers to “not normal operation”. Normal operation refers to an operation that can be learned from a statistical distribution in which the distribution is concentrated when a statistical distribution of operation characteristics is considered. An operation that deviates greatly from the distribution is defined as an abnormal operation. Hereinafter, an abnormal situation candidate detection system according to the present invention will be described with reference to the drawings. The structure of the first embodiment of the present invention is shown in FIG. The detection system of the present embodiment includes an input unit (1), a feature extraction unit (2), a feature analysis unit (3), and a saliency calculation unit (4).
入力部ではカメラで撮影された画像が入力されると、その画像をデジタル化して時系列画像I(x,y,t)を出力する。時系列画像I(x,y,t)は各時空点(x,y,t)に対応する値をもつ時空間データである。この時系列画像I(x,y,t)はデジタル画像であり、x,y,tはそれぞれ0からW−1、H−1,T−1の間の整数の値を持つ。また、I(x,y,t)はそれぞれの時空点(x,y,t)における赤の強さを表すR(x,y,t)、緑の強さを表すG(x,y,t)、青の強さを表すB(x,y,t)の画素値から構成され、それぞれ0から255の整数の値を持つ。 When an image captured by the camera is input to the input unit, the image is digitized and a time-series image I (x, y, t) is output. The time-series image I (x, y, t) is spatio-temporal data having a value corresponding to each space-time point (x, y, t). This time-series image I (x, y, t) is a digital image, and x, y, and t each have an integer value between 0 and W-1, H-1, and T-1. I (x, y, t) is R (x, y, t) representing the red intensity at each space-time point (x, y, t), and G (x, y, t) representing the green intensity. t), composed of pixel values of B (x, y, t) representing the intensity of blue, each having an integer value from 0 to 255.
特徴抽出部では、Δt≦t≦T−Δt、Δx≦x≦X−Δx、Δy≦y≦Y−Δxを満たすN個の時空点(x,y,t)のそれぞれにおいて時空点(x,y,t)を中心とする時空間の領域t−Δt≦t+Δt、x−Δx≦x+Δx、y−Δy≦y+Δyに含まれる各画素の画素値R(x,y,t)、G(x,y,t)、B(x,y,t)に基づいてその領域の特徴を表すK次元の特徴v(x,y,t)を抽出する。どのような特徴を抽出するかということについては様々な方法が知られている。この発明はどのような特徴を抽出するかについて特に限定するものではなく、例えば色以外に物体の輪郭線の方向を特徴とする方法、あるいは、物体の動きの方向を特徴とする方法などが考えられる。ここでは、一般に良く利用される特徴を例として本発明の具体的な構成を説明する。 In the feature extraction unit, each of the N space-time points (x, y, t) satisfying Δt ≦ t ≦ T−Δt, Δx ≦ x ≦ X−Δx, Δy ≦ y ≦ Y−Δx, The pixel values R (x, y, t), G (x, x, y) of the pixels included in the space-time regions t−Δt ≦ t + Δt, x−Δx ≦ x + Δx, and y−Δy ≦ y + Δy centered on y, t) Based on y, t) and B (x, y, t), a K-dimensional feature v (x, y, t) representing the feature of the region is extracted. Various methods are known as to what features are extracted. The present invention is not particularly limited as to what kind of features are extracted. For example, a method that characterizes the direction of the outline of an object other than a color, or a method that characterizes the direction of movement of an object is considered. It is done. Here, a specific configuration of the present invention will be described by taking, as an example, characteristics that are commonly used.
ここで例としてあげる特徴は色に関するものである。上記に述べたように、I(x,y,t)はそれぞれの時空点(x,y,t)における赤の強さを表すR(x,y,t)、緑の強さを表すG(x,y,t)、青の強さを表すB(x,y,t)の画素値から構成され、それぞれ0から255の整数の値を持つ。R(x,y,t)、G(x,y,t)、B(x,y,t)のそれぞれにおいて0から255までの整数を、63以下、64から127まで、128から191まで、192以上の4段階に区分する。このようにして色は4×4×4=64個の区画に区分されることになる。例えば、ある区画では、64≦R≦127、0≦G≦63、128≦B≦191である。 The example feature here relates to color. As described above, I (x, y, t) is R (x, y, t) representing the intensity of red at each space-time point (x, y, t), and G representing the intensity of green. (X, y, t) is composed of pixel values of B (x, y, t) representing the intensity of blue, each having an integer value from 0 to 255. In each of R (x, y, t), G (x, y, t), and B (x, y, t), an integer from 0 to 255 is set to 63 or less, from 64 to 127, from 128 to 191, It is divided into four stages of 192 or more. In this way, the color is divided into 4 × 4 × 4 = 64 sections. For example, in a certain section, 64 ≦ R ≦ 127, 0 ≦ G ≦ 63, and 128 ≦ B ≦ 191.
時空点(x,y,t)を中心とする時空間の領域t−Δt≦t+Δt、x−Δx≦x+Δx、y−Δy≦y+Δyに含まれる各画素の画素値R(x,y,t)、G(x,y,t)、B(x,y,t)が64種類の区画のどこに属するかを判断し、それぞれの区画に何個の画素が含まれるかを計数し、その結果を64次元のベクトルv(x,y,t)にまとめる。このベクトルのk番目の要素はk番目の色の区画に時空間の領域t−Δt≦t+Δt、x−Δx≦x+Δx、y−Δy≦y+Δyに含まれる画素の個数を表す。この場合、特徴の次元はK=64である。 Pixel value R (x, y, t) of each pixel included in a space-time region t-Δt ≦ t + Δt, x-Δx ≦ x + Δx, y-Δy ≦ y + Δy centering on the space-time point (x, y, t) , G (x, y, t) and B (x, y, t) are determined to which of the 64 types of partitions belong, and the number of pixels included in each partition is counted. A 64-dimensional vector v (x, y, t) is collected. The kth element of this vector represents the number of pixels included in the space-time areas t−Δt ≦ t + Δt, x−Δx ≦ x + Δx, and y−Δy ≦ y + Δy in the kth color section. In this case, the feature dimension is K = 64.
特徴解析部では、特徴抽出部が抽出したベクトルK次元の特徴の統計量を算出する。具体的には、Δt≦t≦T−Δt、Δx≦x≦X−Δx、Δy≦y≦Y−Δxを満たすN個の時空点(x,y,t)のそれぞれにおいて抽出されたN個のK次元の特徴v(x,y,t)の平均<v>と標準偏差ベクトルσを以下の式(数1と数2)に従って算出する。
The feature analysis unit calculates a statistic of the vector K-dimensional feature extracted by the feature extraction unit. Specifically, N extracted at each of N space-time points (x, y, t) satisfying Δt ≦ t ≦ T−Δt, Δx ≦ x ≦ X−Δx, and Δy ≦ y ≦ Y−Δx. The average <v> of the K-dimensional feature v (x, y, t) and the standard deviation vector σ are calculated according to the following equations (
![]()
![]()
![]()
![]()
顕著性算出部では、特徴抽出部で抽出されたベクトルK次元の特徴と、特徴解析部で算出された算出結果に基づいて所定の多数の時空点(x,y,t)における顕著性を算出する。以下、この顕著性算出部による算出方法について具体的に説明する。まず、特徴抽出部で算出されたΔt≦t≦T−Δt、Δx≦x≦X−Δx、Δy≦y≦Y−Δxを満たすN個の時空点(x,y,t)のそれぞれにおける特徴を表すベクトルK次元の特徴v(x,y,t)と特徴解析部で算出されたN個のK次元の特徴v(x,y,t)の平均<v>の差をとり、次式のようにそれをw(x,y,t)とする。 The saliency calculation unit calculates saliency at a predetermined number of space-time points (x, y, t) based on the vector K-dimensional feature extracted by the feature extraction unit and the calculation result calculated by the feature analysis unit. To do. Hereinafter, a calculation method by the saliency calculation unit will be specifically described. First, features at each of N space-time points (x, y, t) satisfying Δt ≦ t ≦ T−Δt, Δx ≦ x ≦ X−Δx, and Δy ≦ y ≦ Y−Δx calculated by the feature extraction unit. The difference between the average <v> of the vector K-dimensional feature v (x, y, t) representing N and the N K-dimensional features v (x, y, t) calculated by the feature analysis unit is Let it be w (x, y, t).
![]()
![]()
顕著性S(x,y,t)は次式で算出される。ここで顕著性とは、一般的に人が画像を観察したときに人の目の注意が向きやすい程度を表す尺度をいい、例えば画像データの中に周囲と異なる対象がある場合に大きくなる指標である。 The saliency S (x, y, t) is calculated by the following equation. Here, saliency is a measure that generally indicates the degree to which a person's eyes are more likely to pay attention when observing an image. For example, an index that increases when there is a different object in the image data. It is.
![]()
![]()
この式は時空点(x,y,t)における特徴を表すベクトルK次元の特徴v(x,y,t)がそれらの平均v(x,y,t)からどれほど離れているかの尺度(すなわち顕著性)を表す。この尺度によれば、特徴が周囲と異なっているときに顕著性が高くなる。 This equation is a measure of how far the vector K-dimensional feature v (x, y, t) representing the feature at space-time point (x, y, t) is from their mean v (x, y, t) (ie Saliency). According to this scale, the saliency increases when the features are different from the surroundings.
本実施例によれば、時間的にみてもまた空間的にみても周囲と特徴が異なっているところの顕著性が高くなり、それを異常事態発生の指標として用いることができる。従って、TMや駐車場など予め起こりうる状況が予想できる場合に限られることなく、異常事態の可能性の指標として顕著性を算出することができる。また、時間的にみてもまた空間的にみても周囲と特徴が異なっているところの顕著性が高くなるので、異常事態が起こった時間だけでなく場所も特定できる。そのため、異常事態が狭い領域に限られていても見逃す可能性が小さいという効果がある。さらに、それぞれの瞬間における顕著性ではなく時間空間のある領域の特徴に基づいて顕著性を算出するので、時間の経過を見て初めて判断されるような異常事態の指標を算出できるという効果がある。 According to the present embodiment, the saliency is high where the features are different from the surroundings in terms of time and space, and this can be used as an index of occurrence of an abnormal situation. Accordingly, the saliency can be calculated as an index of the possibility of an abnormal situation without being limited to the case where a situation that can occur in advance such as a TM or a parking lot can be predicted. In addition, since the conspicuousness is high where the features are different from the surroundings in terms of time and space, it is possible to specify not only the time when the abnormal situation occurred but also the location. Therefore, even if the abnormal situation is limited to a narrow area, there is an effect that the possibility of overlooking is small. Furthermore, since the saliency is calculated not based on the saliency at each moment but based on the characteristics of a certain area of time space, there is an effect that it is possible to calculate an index of an abnormal situation that can be judged only after the passage of time. .
(実施例2)
本発明の第2の実施例の構成を図2に示す。本実施例は入力部(1)、特徴抽出部(2)、特徴解析部(3)、顕著性算出部(4)、異常事態候補検出部(5)から成る。入力部(1)、特徴抽出部(2)、特徴解析部(3)、顕著性算出部(4)は実施例1と同様である。実施例2は実施例1に異常事態候補検出部(5)を付け加えた構成となっている。
(Example 2)
The configuration of the second embodiment of the present invention is shown in FIG. This embodiment includes an input unit (1), a feature extraction unit (2), a feature analysis unit (3), a saliency calculation unit (4), and an abnormal situation candidate detection unit (5). The input unit (1), feature extraction unit (2), feature analysis unit (3), and saliency calculation unit (4) are the same as those in the first embodiment. The second embodiment has a configuration in which an abnormal situation candidate detection unit (5) is added to the first embodiment.
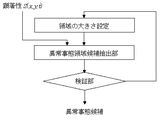
異常事態候補検出部では顕著性算出部で算出されたΔt≦t≦T−Δt、Δx≦x≦X−Δx、Δy≦y≦Y−Δxを満たすN個の時空点(x,y,t)のそれぞれにおける顕著性の値に基づいて異常事態が起こっている可能性がある、若しくは可能性の大きい時空間の領域を検出する。図3にそのアルゴリズムの一例を示す。 In the abnormal situation candidate detecting unit, N space-time points (x, y, t) satisfying Δt ≦ t ≦ T−Δt, Δx ≦ x ≦ X−Δx, Δy ≦ y ≦ Y−Δx calculated by the saliency calculating unit. ) To detect a space-time region in which there is a possibility or high possibility that an abnormal situation has occurred. FIG. 3 shows an example of the algorithm.
領域の大きさ設定部では候補として検出する領域の大きさを決定する。初期値は例えば全時空領域0≦t≦T、0≦x≦X、0≦y≦Yの2分の1とする。異常事態領域候補抽出部では、領域の大きさ設定部で大きさを設定した領域の位置をずらせながらその領域内での顕著性の総和を算出し、顕著性の総和が最大である領域を異常事態領域候補として仮り抽出する。検証部では顕著性の総和と領域の大きさに基づいてその領域が異常事態領域候補として適切かどうか判断し、適切と判断した場合はその領域を異常事態領域候補として出力する。そうでない場合は領域の大きさをより小さく設定して同じ処理を繰り返す。所定の回数繰り返しても適切と判断される異常事態領域候補が出力されなければ異常事態候補が無いとして処理を終了する。 The area size setting unit determines the size of the area to be detected as a candidate. The initial value is, for example, one half of all space-time areas 0 ≦ t ≦ T, 0 ≦ x ≦ X, and 0 ≦ y ≦ Y. The abnormal area candidate extraction unit calculates the sum of the saliency in the area while shifting the position of the area whose size is set by the area size setting unit, and abnormally identifies the area where the saliency sum is maximum. Temporarily extracted as a situation area candidate. The verification unit determines whether the area is appropriate as an abnormal situation area candidate based on the sum of the saliency and the size of the area, and outputs the area as an abnormal area candidate when it is determined as appropriate. Otherwise, the same process is repeated with the area size set smaller. If an abnormal situation area candidate that is determined to be appropriate is not output even if it is repeated a predetermined number of times, the process is terminated because there is no abnormal situation candidate.
実施例2は実施例1に異常事態候補検出部を付け加えたものであるが、異常事態が生じている時空間の領域を特定できるので、その領域をさらに詳しく分析する処理につなぐことが可能となるという効果がある。また、特定された時空間の領域の画像を人間に提示して人間に判断させることも可能となる。 In the second embodiment, an abnormal situation candidate detection unit is added to the first embodiment. However, since a space-time area in which an abnormal situation occurs can be specified, it is possible to connect to a process for analyzing the area in more detail. There is an effect of becoming. It is also possible to present the image of the specified space-time region to a human and make him / her judge.
(実施例3)
本発明の第3の実施例の構成を図4に示す。本実施例は第2の実施例の構成に、複数の基底ベクトルを格納する基底ベクトル格納部(6)を付け加えたものである。また、それに伴って、特徴抽出部(2)における処理内容が実施例1、実施例2と異なっており、本実施例の特徴抽出部(2)では所定の多数の時空点において時空間データの時空点を含む時空間の小領域の画素値を要素とするベクトルと前記基底ベクトル格納部に格納されている複数の基底ベクトルとの内積を算出することで特徴を表すベクトルを算出する。以下、詳細に説明する。
(Example 3)
The configuration of the third embodiment of the present invention is shown in FIG. In this embodiment, a base vector storage unit (6) for storing a plurality of base vectors is added to the configuration of the second embodiment. Accordingly, the processing contents in the feature extraction unit (2) are different from those in the first and second embodiments. In the feature extraction unit (2) of this embodiment, the spatio-temporal data is stored at a predetermined number of space-time points. A vector representing a feature is calculated by calculating an inner product of a vector having a pixel value of a small area of the space-time including a space-time point as an element and a plurality of base vectors stored in the base vector storage unit. Details will be described below.
特徴抽出部では、Δt≦t≦T−Δt、Δx≦x≦X−Δx、Δy≦y≦Y−Δxを満たすN個の時空点(x,y,t)のそれぞれにおいて時空点(x,y,t)を中心とする時空間の領域t−Δt≦t+Δt、x−Δx≦x+Δx、y−Δy≦y+Δyに含まれる各画素の画素値R(x,y,t)、G(x,y,t)、B(x,y,t)に基づいてその領域の特徴を表すK次元の特徴v(x,y,t)を抽出する。この点は実施例1、実施例2と同様である。本実施例では、どのような特徴を抽出するかという点において実施例1、実施例2と異なっている。時空点(x,y,t)を中心とする時空間の領域t−Δt≦t+Δt、x−Δx≦x+Δx、y−Δy≦y+Δyに含まれる画素値R(x,y,t)、G(x,y,t)、B(x,y,t)の総和は次式である。 In the feature extraction unit, each of the N space-time points (x, y, t) satisfying Δt ≦ t ≦ T−Δt, Δx ≦ x ≦ X−Δx, Δy ≦ y ≦ Y−Δx, The pixel values R (x, y, t), G (x, x, y) of the pixels included in the space-time regions t−Δt ≦ t + Δt, x−Δx ≦ x + Δx, and y−Δy ≦ y + Δy centered on y, t) Based on y, t) and B (x, y, t), a K-dimensional feature v (x, y, t) representing the feature of the region is extracted. This is the same as in the first and second embodiments. The present embodiment is different from the first and second embodiments in what features are extracted. Pixel values R (x, y, t), G (included in space-time regions t−Δt ≦ t + Δt, x−Δx ≦ x + Δx, y−Δy ≦ y + Δy centered on the space-time point (x, y, t) The sum of x, y, t) and B (x, y, t) is as follows.
![]()
![]()
これらn個の要素を持つベクトルをU(x,y,z)とする。このベクトルはn次元であるが、同じ次元の基底ベクトルを適当な個数、例えばK個準備し、Q1、Q2、…、QKとする。これらのベクトルは次式に示す正規直交関係を満たしているものとする。 A vector having these n elements is U (x, y, z). This vector is n-dimensional, the base vector of the same dimension suitable number, for example, the K preparation, Q 1, Q 2, ..., and Q K. These vectors are assumed to satisfy the orthonormal relationship represented by the following equation.
![]()
![]()
上式はクロネッカのデルタであり、iとjが等しい時に1の値を持ち、それ以外のときは0の値を持つ。基底ベクトル格納部にはこれらのベクトルQ1、Q2、…、QKが格納される。このとき、v1(x,y,t)、v2(x,y,t)、…、vK(x,y,t)を要素とするK次元の特徴v(x,y,t)が次式のように得られる。 The above equation is a Kronecker delta, which has a value of 1 when i and j are equal, and has a value of 0 otherwise. These vectors Q 1, Q 2,..., Q K are stored in the basis vector storage unit. At this time, a K-dimensional feature v (x, y, t) having v 1 (x, y, t), v 2 (x, y, t), ..., v K (x, y, t) as elements. Is obtained as follows.
![]()
![]()
本実施例は第2の実施例の構成に基底ベクトル格納部(6)を付け加えたものであるが、それによって基底ベクトルQ1、Q2、…、QKを取り換えれば抽出される特徴を変化させることができるようになる。実施例1や実施例2では特徴が固定されていたが、本実施例のように特徴を変化させることができるようになれば、場面の特性に応じて抽出される特徴を適切なものに変えることで異常事態の候補を検出する能力を高めることができるという効果がある。 Although the present embodiment is obtained adding a base vector storage unit (6) to the configuration of the second embodiment, whereby the base vectors Q 1, Q 2, ..., the features extracted if Torikaere the Q K Can be changed. The features are fixed in the first and second embodiments, but if the features can be changed as in the present embodiment, the extracted features are changed to appropriate ones according to the characteristics of the scene. This has the effect of improving the ability to detect candidates for abnormal situations.
(実施例4)
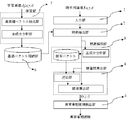
本発明の第4の実施例の構成を図5に示す。本実施例は第3の実施例に学習部(7)を付け加えたものである。学習部(7)では予め準備しておいた学習用の複数個の時系列画像J1(x,y,t)、J2(x,y,t)、…、JL(x,y,t)を基に、基底ベクトル格納部に格納する基底ベクトルを算出する。
Example 4
The configuration of the fourth embodiment of the present invention is shown in FIG. In this embodiment, a learning unit (7) is added to the third embodiment. In the learning unit (7), a plurality of learning time-series images J 1 (x, y, t), J 2 (x, y, t), ..., J L (x, y, t) prepared in advance. Based on t), a base vector to be stored in the base vector storage unit is calculated.
学習部ではまず、L個の時系列画像J1(x,y,t)、J2(x,y,t)、…、JL(x,y,t)のそれぞれにおいてΔt≦t≦T−Δt、Δx≦x≦X−Δx、Δy≦y≦Y−Δxを満たす時空点(x,y,t)をP個ランダムに選ぶ。こうして選ばれたP個の時空点(x,y,t)のそれぞれを中心とする時空間の領域t−Δt≦t+Δt、x−Δx≦x+Δx、y−Δy≦y+Δyに含まれる各画素の画素値Ri(x,y,t)、Gi(x,y,t)、Bi(x,y,t)を要素とする画素値ベクトルsi(x,y,t)を抽出する。si(x,y,t)はi番目の時系列画像の時空点(x,y,t)におけるベクトルである。 First, in the learning unit, Δt ≦ t ≦ T in each of the L time-series images J 1 (x, y, t), J 2 (x, y, t),..., J L (x, y, t). P space-time points (x, y, t) that satisfy −Δt, Δx ≦ x ≦ X−Δx, and Δy ≦ y ≦ Y−Δx are randomly selected. Pixels of the respective pixels included in the spatio-temporal regions t-Δt ≦ t + Δt, x-Δx ≦ x + Δx, y-Δy ≦ y + Δy centering on each of the P space-time points (x, y, t) thus selected. the value R i (x, y, t ), G i (x, y, t), B i (x, y, t) the pixel value vector s and the element i (x, y, t) to extract. s i (x, y, t) is a vector at the space-time point (x, y, t) of the i-th time-series image.
次に、多数のベクトルsi(x,y,t)に対して主成分分析を施して基底ベクトルを算出するが、具体的な手順を以下に記す。まず、次式に従って平均<s>と共分散行列Mを算出する。なお、次式においてNLはベクトルsi(x,y,t)の個数である。また、si(x,y,t)Tはsi(x,y,t)の転置ベクトルを表す。 Next, principal vectors are subjected to principal component analysis for a large number of vectors s i (x, y, t) to calculate basis vectors. The specific procedure is described below. First, an average <s> and a covariance matrix M are calculated according to the following equation. In the following equation, N L is the number of vectors s i (x, y, t). S i (x, y, t) T represents a transposed vector of s i (x, y, t).
![]()
![]()
![]()
![]()
次に共分散行列Mの固有ベクトルを算出し、それらを固有値が大きいほうからK個並べてQ1、Q2、…、QKとこれらのベクトルを基底ベクトルとして基底ベクトル格納部に格納する。 Next, eigenvectors of the covariance matrix M are calculated, K are arranged from the largest eigenvalue, and Q 1, Q 2,..., Q K and these vectors and these vectors are stored in the basis vector storage unit.
本実施例は第3の実施例に学習部(7)を付け加えたものであるが、これによって異常事態の候補検出の対象となる時系列画像から抽出するべき特徴の種類を第1および第2の実施例のように予め固定するのではなく、また、第3に実施例のように人手によって特徴を決めるのでもなく学習用の時系列画像J1(x,y,t)、J2(x,y,t)、…、JL(x,y,t)を与えれば基底ベクトルQ1、Q2、…、QKが自動的に決定される。 In this embodiment, a learning unit (7) is added to the third embodiment. With this, the first and second types of features to be extracted from the time-series images that are candidates for detection of abnormal situations are detected. In the third embodiment, the learning time series images J 1 (x, y, t) and J 2 (J 2 (x, y, t) are not fixed in advance as in the third embodiment. x, y, t), ... , J L (x, y, basis vectors Q 1 be given to t), Q 2, ..., Q K is automatically determined.
本実施例によれば、学習用の時系列画像J1(x,y,t)、J2(x,y,t)、…、JL(x,y,t)を与えれば基底ベクトルQ1、Q2、…、QKが自動的に決定されるので、異常事態の候補検出の対象となる時系列画像と同種類の時系列画像を学習用の時系列画像として用いることで、学習した時系列画像と同種類の時系列画像に最適な基底ベクトルQ1、Q2、…、QKを人手を要さずに自動的に選ぶことができるという効果がある。 According to the present embodiment, if a learning time series image J 1 (x, y, t), J 2 (x, y, t),..., J L (x, y, t) is given, the basis vector Q 1, Q 2,..., Q K are automatically determined, so that a time-series image of the same type as the time-series image that is a candidate for detecting an abnormal situation is used as a time-series image for learning. There is an effect that it is possible to automatically select base vectors Q 1, Q 2,..., Q K that are optimal for time series images of the same type as the time series images that are not necessary.
(実施例5)
本発明の第5の実施例の構成を図6に示す。本実施例は第4の実施例と比べて、特徴解析部(3)と、顕著性算出部(4)の内容が異なる。
(Example 5)
The configuration of the fifth embodiment of the present invention is shown in FIG. The present embodiment differs from the fourth embodiment in the contents of the feature analysis unit (3) and the saliency calculation unit (4).
本実施例の特徴解析部ではΔt≦t≦T−Δt、Δx≦x≦X−Δx、Δy≦y≦Y−Δxを満たすN個の時空点(x,y,t)のそれぞれにおいて抽出されたN個のK次元の特徴v(x,y,t)の平均<v>と共分散Cを以下の式(数11と数12)に従って算出する。 In the feature analysis unit of the present embodiment, each of N space-time points (x, y, t) satisfying Δt ≦ t ≦ T−Δt, Δx ≦ x ≦ X−Δx, and Δy ≦ y ≦ Y−Δx is extracted. The average <v> and covariance C of the N K-dimensional features v (x, y, t) are calculated according to the following equations (Equations 11 and 12).
![]()
![]()
![]()
![]()
次に共分散行列Cの固有ベクトルを算出し、それらを固有値が大きいほうからM個並べてu1、u2、…、uMとし、それらを記憶しておく。 Next, eigenvectors of the covariance matrix C are calculated, M are arranged in order from the largest eigenvalue, u 1 , u 2 ,..., U M are stored.
顕著性算出部は近似部と誤差算出部から構成される。 The saliency calculation unit includes an approximation unit and an error calculation unit.
近似部では、特徴抽出部で算出されたΔt≦t≦T−Δt、Δx≦x≦X−Δx、Δy≦y≦Y−Δxを満たすN個の時空点(x,y,t)のそれぞれにおける特徴を表すベクトルN個のK次元の特徴v(x,y,t)と特徴解析部で算出されたN個のK次元の特徴v(x,y,t)の平均<v>の差をとり、次式のようにそれをw(x,y,t)とする。 In the approximation unit, each of the N space-time points (x, y, t) satisfying Δt ≦ t ≦ T−Δt, Δx ≦ x ≦ X−Δx, and Δy ≦ y ≦ Y−Δx calculated by the feature extraction unit. The difference between the average <v> of the N K-dimensional features v (x, y, t) representing the features in N and the N K-dimensional features v (x, y, t) calculated by the feature analysis unit And let it be w (x, y, t) as in the following equation.
![]()
![]()
次に、次式に示すようにw(x,y,t)をM個の固有ベクトルu1、u2、…、uMの線形結合で近似したものを求める。 Next, as shown in the following equation, w (x, y, t) is approximated by a linear combination of M eigenvectors u 1 , u 2 ,.
![]()
![]()
誤差算出部では、w(x,y,t)を上述の式13で近似したときの誤差を次式で算出し、顕著性S(x,y,t)として出力する。 In the error calculation unit, an error when w (x, y, t) is approximated by the above-described equation 13 is calculated by the following equation and output as saliency S (x, y, t).
![]()
![]()
本実施例では特徴抽出部で抽出した特徴に対して特徴解析部で主成分分析を行い、各時空点における特徴を主成分分析で得られた固有ベクトルで近似したときの誤差を顕著性として出力している。実施例1から実施例4では単に特徴の平均との差異を顕著性としており、様々な特徴が周囲とくらべて少しずつ異なっている場合でもその総和が大きいときは顕著性が高くなるという性質があった。それと比較して本実施例によれば、少数の特徴が大きく変化している場合に顕著性が高くなるという性質がある。人間は線の方向などある特定の特徴が周囲と比べて異なっているときにそこに注意を向けやすいという性質をもっており、この実施例は人間の視覚系における注意の機能により類似した性質を持っており、異常事態の有無の判断において人間の判断により近いことが期待できるという効果がある。 In this embodiment, the principal component analysis is performed by the feature analysis unit on the feature extracted by the feature extraction unit, and the error when approximating the feature at each space-time point with the eigenvector obtained by the principal component analysis is output as saliency. ing. In the first to fourth embodiments, the difference from the average of the features is merely noticeable, and even when various features are slightly different from the surroundings, the feature is high when the sum is large. there were. In contrast to this, according to the present embodiment, there is a property that the saliency becomes high when a small number of features are greatly changed. Humans have the property that they can easily focus on certain features such as the direction of the line when they are different from the surroundings, and this embodiment has a more similar property to the function of attention in the human visual system. In addition, there is an effect that it can be expected to be closer to human judgment in determining whether there is an abnormal situation.
(実施例6)
本発明の第6の実施例の構成を図7に示す。本実施例は第5の実施例とは別の方法で特徴解析部(3)と顕著性算出部(4)を実現したものである。
(Example 6)
The configuration of the sixth embodiment of the present invention is shown in FIG. In this embodiment, the feature analysis section (3) and the saliency calculation section (4) are realized by a method different from that of the fifth embodiment.
特徴解析部では、第5の実施例と同じく、Δt≦t≦T−Δt、Δx≦x≦X−Δx、Δy≦y≦Y−Δxを満たすN個の時空点(x,y,t)のそれぞれにおいてにおいて抽出されたN個のK次元の特徴v(x,y,t)の平均<v>と共分散Cを前記の式、数11と数12に従って算出する。本実施例では特徴解析部の処理はこれだけである。 In the feature analysis unit, as in the fifth embodiment, N space-time points (x, y, t) that satisfy Δt ≦ t ≦ T−Δt, Δx ≦ x ≦ X−Δx, and Δy ≦ y ≦ Y−Δx. The average <v> and the covariance C of the N K-dimensional features v (x, y, t) extracted in each of the above are calculated according to the above equations (11) and (12). In the present embodiment, this is the only process of the feature analysis unit.
顕著性算出部では、まず、特徴抽出部で算出されたΔt≦t≦T−Δt、Δx≦x≦X−Δx、Δy≦y≦Y−Δxを満たすN個の時空点(x,y,t)のそれぞれにおける特徴を表すベクトルN個のK次元の特徴v(x,y,t)が多次元正規分布に従うと仮定して、特徴解析部で算出した平均<v>と共分散Cを利用して特徴v(x,y,t)の生起確率を次式のように算出する。 In the saliency calculating unit, first, N space-time points (x, y, x) satisfying Δt ≦ t ≦ T−Δt, Δx ≦ x ≦ X−Δx, and Δy ≦ y ≦ Y−Δx calculated by the feature extracting unit. Assuming that N vector K-dimensional features v (x, y, t) representing features in each of t) follow a multidimensional normal distribution, the mean <v> and covariance C calculated by the feature analysis unit are The occurrence probability of the feature v (x, y, t) is calculated using the following equation.
![]()
![]()
次に、次式によって、この特徴を観測したときに得られる情報量を算出し、顕著性として出力する。 Next, the amount of information obtained when observing this feature is calculated by the following equation and output as saliency.
![]()
![]()
本実施例では、顕著性はその特徴を観測することによって得られる情報量であるという物理的意味が定まっているので、この結果をもとにより適切な判断が可能となるという効果がある。 In this embodiment, since the physical meaning that the saliency is the amount of information obtained by observing the feature is determined, there is an effect that an appropriate determination can be made based on this result.
1 入力部
2 特徴抽出部
3 特徴解析部
4 顕著性算出部
5 異常事態候補検出部
6 基底ベクトル格納部
7 学習部
DESCRIPTION OF
Claims (6)
The feature analysis unit calculates an average and a covariance of a number of features extracted by the feature extraction unit, and the saliency calculation unit calculates a predetermined number of spacetimes based on the average and the covariance calculated by the feature analysis unit. 5. The probability of occurrence of a vector whose element is a pixel value of a spatio-temporal small region including spatiotemporal data extracted at a point is calculated, and saliency is calculated based on the evaluated occurrence probability. The abnormal situation detection system described in Crab.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011002628A JP2012146040A (en) | 2011-01-11 | 2011-01-11 | Detecting system of abnormal situation |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011002628A JP2012146040A (en) | 2011-01-11 | 2011-01-11 | Detecting system of abnormal situation |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012146040A true JP2012146040A (en) | 2012-08-02 |
Family
ID=46789556
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011002628A Pending JP2012146040A (en) | 2011-01-11 | 2011-01-11 | Detecting system of abnormal situation |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012146040A (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015106382A (en) * | 2013-12-02 | 2015-06-08 | オムロン株式会社 | Image processing apparatus, image processing method and program |
| JP2018022360A (en) * | 2016-08-04 | 2018-02-08 | 株式会社リコー | Image analysis device, image analysis method and program |
-
2011
- 2011-01-11 JP JP2011002628A patent/JP2012146040A/en active Pending
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015106382A (en) * | 2013-12-02 | 2015-06-08 | オムロン株式会社 | Image processing apparatus, image processing method and program |
| JP2018022360A (en) * | 2016-08-04 | 2018-02-08 | 株式会社リコー | Image analysis device, image analysis method and program |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10872262B2 (en) | Information processing apparatus and information processing method for detecting position of object | |
| JP7229662B2 (en) | How to issue alerts in a video surveillance system | |
| JP6494253B2 (en) | Object detection apparatus, object detection method, image recognition apparatus, and computer program | |
| JP6614611B2 (en) | Apparatus, program, and method for tracking object in consideration of similarity between images | |
| JP6598746B2 (en) | Apparatus, program, and method for tracking an object in consideration of an image area of another object | |
| TWI430186B (en) | Image processing apparatus and image processing method | |
| US20200012923A1 (en) | Computer device for training a deep neural network | |
| CN112966646B (en) | Video segmentation method, device, equipment and medium based on two-way model fusion | |
| CN112001339A (en) | Pedestrian social distance real-time monitoring method based on YOLO v4 | |
| CN112801018A (en) | Cross-scene target automatic identification and tracking method and application | |
| US20150262068A1 (en) | Event detection apparatus and event detection method | |
| KR20180065889A (en) | Method and apparatus for detecting target | |
| US10691969B2 (en) | Asynchronous object ROI detection in video mode | |
| KR20140028809A (en) | Adaptive image processing apparatus and method in image pyramid | |
| Krotosky et al. | Person surveillance using visual and infrared imagery | |
| JP2021089717A (en) | Method of subject re-identification | |
| JPWO2012046426A1 (en) | Object detection apparatus, object detection method, and object detection program | |
| WO2022257314A1 (en) | Image detection method, related training method, related apparatus, device, and medium | |
| GB2457797A (en) | Associating face images using covariance matrices of extracted features | |
| JP2012146040A (en) | Detecting system of abnormal situation | |
| WO2023164370A1 (en) | Method and system for crowd counting | |
| CN117409347A (en) | ESNN-based early fire detection method | |
| JP2010170201A (en) | Object detection device | |
| CN114119970B (en) | Target tracking method and device | |
| CN114332071A (en) | Video anomaly detection method based on foreground information enhancement |