JP2011237323A - Noise measuring device - Google Patents
Noise measuring device Download PDFInfo
- Publication number
- JP2011237323A JP2011237323A JP2010110125A JP2010110125A JP2011237323A JP 2011237323 A JP2011237323 A JP 2011237323A JP 2010110125 A JP2010110125 A JP 2010110125A JP 2010110125 A JP2010110125 A JP 2010110125A JP 2011237323 A JP2011237323 A JP 2011237323A
- Authority
- JP
- Japan
- Prior art keywords
- sound
- measurement signal
- classification function
- moving body
- noise
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000005259 measurement Methods 0.000 claims abstract description 82
- 230000000630 rising effect Effects 0.000 claims description 5
- 238000000034 method Methods 0.000 abstract description 7
- 230000006870 function Effects 0.000 description 33
- 239000011159 matrix material Substances 0.000 description 9
- 238000012545 processing Methods 0.000 description 8
- 238000001514 detection method Methods 0.000 description 6
- 230000004044 response Effects 0.000 description 3
- 238000013459 approach Methods 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 2
- 238000004891 communication Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 229940050561 matrix product Drugs 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 238000004904 shortening Methods 0.000 description 1
Images


Landscapes
- Measurement Of Mechanical Vibrations Or Ultrasonic Waves (AREA)
Abstract
【課題】 簡易な方法で移動体の種類を識別すると共に、その移動体による騒音を測定することができる騒音測定装置を提供する。
【解決手段】 予め収集した移動体が発する音を参照して、移動体が発する音から移動体の種類を識別すると共に、その移動体による音を測定する騒音測定装置であって、移動体が発する音を音測定信号に変換するマイクロホン1と、マイクロホン1が変換した音測定信号から抽出した特徴パラメータの要素を少なくとも二つの値の配列とした特徴パラメータを算出する特徴パラメータ演算手段7と、予め収集した移動体の音測定信号から算出した特徴パラメータを基に分類関数係数を算出する分類関数係数演算手段8と、分類関数係数演算手段8により算出した分類関数係数と移動体の特徴パラメータを基に、分類関数のクラス値を算出する分類クラス演算手段9と、分類クラス演算手段9で算出した分類関数のクラス値から、移動体の種類を識別する識別手段10を備える。
【選択図】 図1PROBLEM TO BE SOLVED: To provide a noise measuring device capable of identifying the type of a moving body by a simple method and measuring the noise caused by the moving body.
SOLUTION: A noise measuring device that refers to sounds collected by a moving body in advance and identifies the type of the moving body from the sounds emitted by the moving body, and measures the sound produced by the moving body. A microphone 1 that converts a sound to be emitted into a sound measurement signal, a feature parameter calculator 7 that calculates a feature parameter having elements of the feature parameter extracted from the sound measurement signal converted by the microphone 1 as an array of at least two values; Based on the characteristic parameter calculated from the collected sound measurement signal of the moving object, the classification function coefficient calculating means 8 for calculating the classification function coefficient, the classification function coefficient calculated by the classification function coefficient calculating means 8 and the characteristic parameter of the moving object In addition, the classification class calculation means 9 for calculating the class value of the classification function and the class value of the classification function calculated by the classification class calculation means 9 Identification means 10 is provided.
[Selection] Figure 1
Description
本発明は、移動体の種類を識別すると共に、その移動体による騒音を測定する騒音測定装置に関する。 The present invention relates to a noise measuring apparatus that identifies the type of a moving body and measures noise caused by the moving body.
従来から道路交通・鉄道交通・航空交通などの交通機関に関して、騒音測定が行われている。単に、その時、その場所における騒音レベルのみを測定するのではなく、その騒音の発生源がどのような物(車種・機種)であるかを識別することが望まれている。例えば、自動車であれば、救急車や消防車などの緊急車両なのか、トラックなのか、乗用車やバイクなのか。また、航空機であれば、ジェット旅客機なのか、戦闘機なのか、軽飛行機なのか。更に、それらの機種、航跡や飛行状態(離陸、着陸、通過)なども識別することが望まれている。 Conventionally, noise measurement has been performed on transportation such as road traffic, rail traffic, and air traffic. At that time, it is desired not to measure only the noise level at that location, but to identify what kind of vehicle (vehicle type / model) the source of the noise is. For example, in the case of an automobile, is it an emergency vehicle such as an ambulance or fire engine, a truck, a passenger car or a motorcycle? Also, if it is an aircraft, is it a jet passenger plane, a fighter plane, or a light aircraft? In addition, it is desired to identify such models, wakes and flight conditions (takeoff, landing, passage).
そこで、航空機毎に、夫々の騒音測定信号に含まれている周波数成分を複数の周波数バンドに分離し、複数の検出バンドレベル最大値データと検出バンドレベル平均値データとの差分を求めることにより求めた相対化バンドレベルデータに基づき、最も近似した機種を選定して機種を識別する航空機の機種識別装置が知られている(例えば、特許文献1参照)。
また、二次レーダ装置を備える航空機に対しては、当該航空機からの応答信号を解析し音データと対比することで、識別の参考にする方法が知られている。
Therefore, for each aircraft, the frequency components included in each noise measurement signal are separated into a plurality of frequency bands, and the difference between a plurality of detected band level maximum value data and detected band level average value data is obtained. There is known an aircraft model identification device that selects a model closest to the model based on the relative band level data and identifies the model (see, for example, Patent Document 1).
In addition, for an aircraft equipped with a secondary radar device, a method is known which is used for identification by analyzing a response signal from the aircraft and comparing it with sound data.
しかし、特許文献1に記載の発明においては、騒音測定信号の最大値データに影響され易いので、近くを通過する航空機と遠くを通過する航空機の識別率に大きな差が生じることがある。
また、二次レーダ装置を備える航空機からの応答信号を使用する方法では、航空機の電波を受信しても、観測点で測定した音が測定対象以外の音を含む場合もあるので、測定対象の航空機の音データであるかの確認が必要となる。また、航空機からの応答信号を受信する装置が大がかりになってしまうし、二次レーダ装置を装備していない航空機には対応することができない。
However, in the invention described in Patent Document 1, since it is easily influenced by the maximum value data of the noise measurement signal, there may be a large difference in the discrimination rate between an aircraft passing near and an aircraft passing far.
In addition, in the method using the response signal from the aircraft equipped with the secondary radar device, even if the radio waves of the aircraft are received, the sound measured at the observation point may include sound other than the measurement target. It is necessary to confirm whether the sound data is aircraft. In addition, a device for receiving a response signal from an aircraft becomes a large scale, and it cannot cope with an aircraft not equipped with a secondary radar device.
本発明は、従来の技術が有するこのような問題点に鑑みてなされたものであり、その目的とするところは、簡易な方法で移動体の種類や状態を識別すると共に、その移動体による騒音を測定することができる騒音測定装置を提供しようとするものである。 The present invention has been made in view of such problems of the prior art, and the object of the present invention is to identify the type and state of a moving body by a simple method and to detect noise caused by the moving body. It is an object of the present invention to provide a noise measuring device capable of measuring the noise.
上記課題を解決すべく請求項1に係る発明は、予め収集した移動体の発する音を参照して、移動体が発する音から移動体の種類を識別すると共に、その移動体による音を測定する騒音測定装置であって、移動体が発する音を音測定信号に変換する集音手段と、この集音手段が変換した音測定信号から抽出した特徴パラメータの要素を少なくとも二つの値の配列とした特徴パラメータを算出する特徴パラメータ演算手段と、予め収集した移動体の音測定信号から算出した特徴パラメータを基に分類関数係数を算出する分類関数係数演算手段と、この分類関数係数演算手段により算出した分類関数係数と移動体の前記特徴パラメータを基に、分類関数のクラス値を算出する分類クラス演算手段と、この分類クラス演算手段で算出した分類関数のクラス値から、移動体の種類を識別する識別手段を備えるものである。 In order to solve the above-mentioned problem, the invention according to claim 1 refers to the sound emitted by the moving body collected in advance, identifies the type of the moving body from the sound emitted by the moving body, and measures the sound by the moving body. A noise measuring device comprising a sound collecting means for converting a sound emitted by a moving body into a sound measurement signal, and an element of a characteristic parameter extracted from the sound measurement signal converted by the sound collecting means as an array of at least two values The characteristic parameter calculating means for calculating the characteristic parameter, the classification function coefficient calculating means for calculating the classification function coefficient based on the characteristic parameter calculated from the sound measurement signal of the mobile body collected in advance, and the classification function coefficient calculating means Based on the classification function coefficient and the feature parameter of the moving object, a classification class computing means for calculating the class value of the classification function, and a classification function class calculated by the classification class computing means. From the scan values are those comprising an identification means for identifying the type of the moving object.
前記特徴パラメータの要素として、前記特徴パラメータの要素として、前記音測定信号の周波数バンドレベル及び/又は移動方向平均法線ベクトルを用いることができる。 As the feature parameter element, the frequency band level and / or moving direction average normal vector of the sound measurement signal can be used as the feature parameter element.
また、前記特徴パラメータの要素として、前記音測定信号の持続時間を分割し、分割毎の周波数バンドレベル及び/又は移動方向平均法線ベクトルを用いることができる。 Further, as the element of the characteristic parameter, the duration of the sound measurement signal can be divided, and the frequency band level and / or moving direction average normal vector for each division can be used.
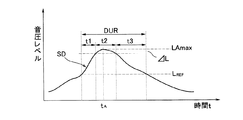
また、前記特徴パラメータの要素として、前記音測定信号の持続時間を前記音測定信号の音圧レベルの最大値(LAmax)から所定値(ΔL)下がった時刻で3分割(t1,t2,t3)し、分割した時間帯(t1,t2,t3)毎又は立ち上がりの時間帯(t1)の周波数バンドレベル及び/又は移動方向平均法線ベクトルを用いることができる。 Further, as an element of the characteristic parameter, the duration of the sound measurement signal is divided into three (t1, t2, t3) at a time when the sound pressure level of the sound measurement signal is lower than a maximum value (LAmax) by a predetermined value (ΔL). The frequency band level and / or moving direction average normal vector of each divided time zone (t1, t2, t3) or rising time zone (t1) can be used.
更に、前記特徴パラメータの要素として、前記音測定信号の持続時間を前記音測定信号の音圧レベルの最大値(LAmax)を基準とし、この最大値までの立ち上がりの時間帯の周波数バンドレベル及び/又は移動方向平均法線ベクトルを用いることができる。 Further, as the element of the characteristic parameter, the duration of the sound measurement signal is based on the maximum value (LAmax) of the sound pressure level of the sound measurement signal, and the frequency band level of the rising time zone up to this maximum value and / or Alternatively, a moving direction average normal vector can be used.
本発明によれば、移動体の音測定信号から算出した特徴パラメータと、予め、算出した分類関数係数から、分類関数のクラス値を算出し、この分類関数のクラス値の中で、最も類似すると判定されるクラス値に対応するものを、当該移動体と選定するものであるから、十分な教師データを与えることができれば、識別率が向上すると共に、多様な状況下においての測定であっても、その識別率は影響を受け難くなる。教師データとは、予め測定対象物が分かっている音測定信号又は特徴パラメータである。 According to the present invention, the class value of the classification function is calculated from the characteristic parameter calculated from the sound measurement signal of the mobile object and the classification function coefficient calculated in advance, and the class value of the classification function is most similar. Since the object corresponding to the class value to be determined is selected as the mobile object, if sufficient teacher data can be provided, the identification rate is improved and even measurement under various circumstances is possible. The identification rate is less affected. The teacher data is a sound measurement signal or a characteristic parameter whose measurement object is known in advance.
また、音測定信号の持続時間を分割した時間帯毎の音データのうち、観測点に近づく音データには移動体の種類を識別するための特徴が強い。特に、航空機の場合には機種を識別する他に、飛行状態(離陸、着陸、通過)や方位なども、音データから自動的に識別することができる。 Of the sound data for each time period obtained by dividing the duration of the sound measurement signal, the sound data approaching the observation point has a strong feature for identifying the type of the moving object. In particular, in the case of an aircraft, in addition to identifying the model, the flight state (takeoff, landing, passage) and direction can be automatically identified from the sound data.
以下に本発明の実施の形態を添付図面に基づいて説明する。本発明に係る騒音測定装置は、図1に示すように、マイクロホン1、音検出部2、信号処理部3、騒音測定部4、記憶部5、表示部6からなる。
Embodiments of the present invention will be described below with reference to the accompanying drawings. As shown in FIG. 1, the noise measuring apparatus according to the present invention includes a microphone 1, a sound detecting unit 2, a
マイクロホン1は、自動車や航空機などの移動体が発する音を集音する集音手段で、音を電気信号に変換する。音検出部2は、マイクロホン1から出力される電気信号をAD変換し、音測定信号として信号処理部3及び騒音計測部4へ送る。信号処理部3は、特徴パラメータ演算手段7、分類関数係数演算手段8、分類クラス演算手段9及び識別手段10を備えている。メモリカードやデータ通信手段などで音測定信号を取り込んで、信号処理部3及び騒音計測部4へ送ってもよい。
The microphone 1 is a sound collecting unit that collects sound emitted by a moving body such as an automobile or an aircraft, and converts the sound into an electric signal. The sound detection unit 2 AD-converts the electrical signal output from the microphone 1 and sends it as a sound measurement signal to the
特徴パラメータ演算手段7は、音検出部2の出力信号である音測定信号を受け、特徴パラメータ(配列)を算出する。どの音データを特徴パラメータの配列の要素とするかは、予め決めておく。分類関数係数演算手段8は、予め、測定対象物と測定音が識別されている教師データについて特徴パラメータ演算手段7で算出された特徴パラメータが当該航空機に該当するように分類関数係数を算出する。分類関数係数演算手段8で算出した機種・飛行状態毎の分類関数係数は、行列データとして記憶部5に記憶される。
The characteristic parameter calculation means 7 receives a sound measurement signal that is an output signal of the sound detector 2 and calculates a characteristic parameter (array). Which sound data is used as an element of the feature parameter array is determined in advance. The classification function coefficient calculation means 8 calculates the classification function coefficient so that the characteristic parameter calculated by the characteristic parameter calculation means 7 for the teacher data in which the measurement object and the measurement sound are identified in advance corresponds to the aircraft. The classification function coefficient for each model / flight state calculated by the classification function coefficient calculation means 8 is stored in the
分類クラス演算手段9は、特徴パラメータ演算手段7で算出された測定対象物の特徴パラメータと予め記憶部5に格納してある分類関数係数との行列積から、各分類関数のクラス値を算出する。識別手段10は、分類クラス演算手段9で算出された各分類関数のクラス値の中で、最も類似すると判定されるクラス値に対応する分類関数係数(機種・飛行状態)を該当機種・飛行状態として選定する。
The classification
識別手段10による選定の結果は、記憶部5に記憶される。また、選定結果等は、所望により表示部6で表示される。このように、マイクロホン1、音検出部2、信号処理部3、記憶部5、表示部6により、航空機などの移動体の機種識別手段が構成される。
The result of selection by the
騒音測定部4は、音検出部2の出力信号である音測定信号についての騒音レベルを測定し、その測定結果を表示部6に表示する。このように、マイクロホン1、音検出部2、騒音測定部4、表示部6により、航空機などの移動体の騒音測定手段が構成される。 The noise measurement unit 4 measures the noise level of the sound measurement signal that is the output signal of the sound detection unit 2 and displays the measurement result on the display unit 6. As described above, the microphone 1, the sound detection unit 2, the noise measurement unit 4, and the display unit 6 constitute a noise measurement unit for a moving body such as an aircraft.
そして、航空機が発する音の測定及び航空機の機種や飛行状態の識別をする場合には、例えば滑走路付近に測定場所(観測点)を選定し、そこに集音手段となるマイクロホン1を設置する。マイクロホン1により、観測点を通過する航空機又は滑走路に発着する航空機が発する音を機種毎に集音する。そして、音検出部2により、音測定信号(SD)を得る。 When measuring the sound emitted from the aircraft and identifying the aircraft model and flight state, for example, a measurement location (observation point) is selected near the runway, and a microphone 1 serving as sound collection means is installed there. . The microphone 1 collects sound generated by an aircraft that passes through the observation point or an aircraft that arrives and departs on the runway for each model. Then, a sound measurement signal (SD) is obtained by the sound detector 2.
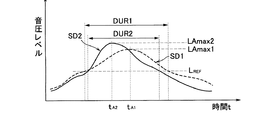
また、滑走路の離陸側と着陸側に夫々マイクロホン1を配置して測定することもできる。マイクロホン1を増やすことで、機種識別率を向上することができる。マイクロホン1から得られる音測定信号(SD1,SD2)の特徴は、図2に示すように、全体としては、一般的に1つの山形状の曲線を示す。時間の経過とともに、航空機がマイクロホン1に近づくにつれて徐々に大きくなり、マイクロホン1から遠ざかるにつれて徐々に小さくなる。 It is also possible to measure by placing the microphones 1 on the take-off side and the landing side of the runway. By increasing the number of microphones 1, the model identification rate can be improved. As shown in FIG. 2, the characteristics of the sound measurement signals (SD1, SD2) obtained from the microphone 1 generally indicate a single mountain-shaped curve as a whole. As time passes, the aircraft gradually increases as it approaches the microphone 1 and gradually decreases as it moves away from the microphone 1.
音測定信号の立ち上がり時間と減衰時間がほぼ同じ場合(SD1)もあれば、音測定信号の立ち上がり時間が減衰時間に比べて短い場合(SD2)もある。音測定信号(SD1,SD2)の持続時間(DUR1,DUR2)は、音測定信号(SD1,SD2)の最大値から所定の基準値(LREF)下がったレベルより大きい時間帯とする。音測定信号(SD1)のピーク時刻を(tA1 )、音測定信号(SD2)のピーク時刻を(tA2 )とする。 In some cases, the rise time and decay time of the sound measurement signal are substantially the same (SD1), and in other cases, the rise time of the sound measurement signal is shorter than the decay time (SD2). The duration (DUR1, DUR2) of the sound measurement signal (SD1, SD2) is a time zone greater than a level that is lower than the maximum value of the sound measurement signal (SD1, SD2) by a predetermined reference value (L REF ). The peak time of the sound measurement signal (SD1) is (t A1 ), and the peak time of the sound measurement signal (SD2) is (t A2 ).
音測定信号(SD1,SD2)には、夫々の航空機の特徴を示すパラメータがある。配列である特徴パラメータの要素は、次のようなデータから適宜選択する。図2に基づいて説明すると、航空機の特徴を示すパラメータとしては、音測定信号の最大値(LAmax1,LAmax2)・音測定信号の持続時間(DUR1,DUR2)・立ち上がり時間・減衰時間などがある。また、音測定信号の各周波数バンドレベルにも特徴がある。 The sound measurement signals (SD1, SD2) have parameters indicating the characteristics of each aircraft. The element of the characteristic parameter that is an array is appropriately selected from the following data. Referring to FIG. 2, the parameters indicating the characteristics of the aircraft include the maximum value of the sound measurement signal (LAmax1, LAmax2), the duration of the sound measurement signal (DUR1, DUR2), the rise time, the decay time, and the like. Further, each frequency band level of the sound measurement signal is also characterized.
各周波数バンドレベルとしては、例えば特許文献1に記載されている周波数バンド毎の最大レベルとなる検出バンドレベル最大値や相対化レベル差データをパラメータとすることができる。これらのように、夫々の航空機の特徴を示すパラメータを、特徴パラメータの要素とすることができる。 As each frequency band level, for example, a detection band level maximum value or a relative level difference data which is a maximum level for each frequency band described in Patent Document 1 can be used as a parameter. As described above, parameters indicating the characteristics of each aircraft can be used as elements of the characteristic parameters.
また、図3に示すように、音測定信号(SD)の持続時間(DUR)を、音測定信号(SD)の最大値(LAmax)から所定の音圧レベル(ΔL)下がった時刻のところで3分割(t1,t2,t3)し、夫々の時間帯における音測定信号(SD)の各周波数バンドレベルを特徴パラメータの要素とすることで、機種識別率をより向上させることができる。 Further, as shown in FIG. 3, the duration (DUR) of the sound measurement signal (SD) is set to 3 at the time when the predetermined sound pressure level (ΔL) is lowered from the maximum value (LAmax) of the sound measurement signal (SD). By dividing (t1, t2, t3) and using each frequency band level of the sound measurement signal (SD) in each time zone as an element of the characteristic parameter, the model identification rate can be further improved.
持続時間(DUR)の3分割は、持続時間(DUR)を3等分したものでもよい。各周波数バンドレベルとしては、特許文献1に記載されているように、検出バンドレベル最大値や相対化レベル差データを用いてもよい。また、3分割に限らず、目的に応じて適宜分割数を増減させ特徴パラメータの要素を決める。 The duration (DUR) can be divided into three parts by dividing the duration (DUR) into three equal parts. As each frequency band level, as described in Patent Document 1, a detected band level maximum value or relative level difference data may be used. Further, the number of divisions is not limited to three and the number of divisions is appropriately increased / decreased according to the purpose to determine the elements of the characteristic parameters.
航空機の場合、立ち上がりの部分である時間帯t1に機種や飛行状態の特徴がよく現れる。航空機の場合は3分割程度が望ましい。時点(tA )での最大値による影響を受けずに埋もれることなく、観測点に近づく時間帯(t1)と観測点から離れる時間帯(t3)の特徴となるデータを利用することができる。また、立ち上がりの部分である時間帯t1におけるデータだけを利用すれば、データ量も増え過ぎない。統計的にデータ量が増えるということは、予め学習させておく教師データの数や手間が増えることを意味する。 In the case of an aircraft, the characteristics of the model and the flight state often appear in the time zone t1, which is the rising portion. In the case of an aircraft, about 3 divisions are desirable. Data that is characteristic of the time zone (t1) approaching the observation point and the time zone (t3) away from the observation point can be used without being buried without being affected by the maximum value at the time point (t A ). Further, if only the data in the time zone t1, which is the rising portion, is used, the amount of data does not increase too much. A statistical increase in the amount of data means an increase in the number and effort of teacher data to be learned in advance.
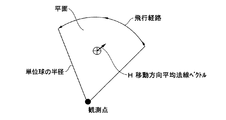
更に、一つの観測点に複数(3個以上)のマイクロホン1を設置することにより、測定音が地上音(自動車等)なのか上空音(航空機等)なのかを区別できると共に、夫々の航空機の飛行方位を知ることができる。例えば、図4に示すように、方位角や仰角のデータと共に航空機の移動方向を表す移動方向平均法線ベクトルHも特徴パラメータの要素にすることで、機種の識別率をさらに向上させることができる。 Furthermore, by installing a plurality (three or more) of microphones 1 at one observation point, it is possible to distinguish whether the measurement sound is ground sound (automobile etc.) or sky sound (aircraft etc.), and each aircraft You can know the flight direction. For example, as shown in FIG. 4, the moving direction average normal vector H representing the moving direction of the aircraft along with the azimuth and elevation data is also used as a feature parameter element, so that the model identification rate can be further improved. .
移動方向平均法線ベクトルHは、飛行経路を、観測点を中心とする単位球面へ投影したものを想定し、観測点と投影した飛行経路からなる面に対して垂直なベクトルとして定めることが知られている(例えば、特開平7−43023号公報参照)。 It is known that the moving direction average normal vector H is determined as a vector perpendicular to the plane formed by the observation point and the projected flight path, assuming that the flight path is projected onto a unit sphere centered on the observation point. (See, for example, JP-A-7-43023).
また、時系列のデータも特徴パラメータに加えることができる。例えば、所定の時間間隔毎に前記特徴パラメータの要素を用意する。航空機音の場合は、観測点に近づく立ち上がり時間の部分が機種・飛行状態について特徴的になる傾向があるので、この時間帯(t1)のデータだけを特徴パラメータの要素とすると効率的である。その他、持続時間(DUR)、日時などを特徴パラメータに加えてもよい。 Time series data can also be added to the feature parameters. For example, the feature parameter elements are prepared at predetermined time intervals. In the case of aircraft sound, since the portion of the rise time that approaches the observation point tends to be characteristic for the model and flight state, it is efficient to use only the data of this time zone (t1) as the characteristic parameter elements. In addition, the duration (DUR), the date and time may be added to the feature parameter.
各航空機の識別精度を向上させるためには、測定の目的により、これらの特徴パラメータの要素を選択して用いることになる。また、データ量の少量化・計算時間の短縮等に考慮して、識別精度を維持しながら、特に有効な要素に限定することで、より効率的に識別することができる。 In order to improve the identification accuracy of each aircraft, elements of these characteristic parameters are selected and used depending on the purpose of measurement. Further, considering the reduction in the amount of data and the shortening of the calculation time, it is possible to identify more efficiently by limiting to particularly effective elements while maintaining the identification accuracy.
以上のように構成された本発明に係る騒音測定装置を航空機に適用する場合の測定手順について、図5に示すフローチャートに沿って説明する。先ず、航空機の各機種についての情報(教師データ)を収集し分類関数係数の行列を作成するための事前工程について説明する。 A measurement procedure when the noise measuring apparatus according to the present invention configured as described above is applied to an aircraft will be described with reference to the flowchart shown in FIG. First, a preliminary process for collecting information (teacher data) on each aircraft model and creating a matrix of classification function coefficients will be described.
観測点に3個のマイクロホン1を設置する。そして、音測定信号の持続時間における音測定信号の周波数バンド毎のレベルと、音圧レベルピーク時の仰角・方位角・音圧レベルを特徴パラメータの要素とし、特徴パラメータの要素数をm個とする。また、識別対象となる航空機の機種数をn個とする。なお、識別対象は飛行状態毎や滑走路毎としてもよい。 Three microphones 1 are installed at the observation point. The level of the sound measurement signal for each frequency band in the duration of the sound measurement signal and the elevation angle, azimuth angle, and sound pressure level at the time of peak sound pressure level are feature parameter elements, and the number of feature parameter elements is m. To do. The number of aircraft models to be identified is n. The identification target may be every flight state or every runway.
ステップSP1において、特徴パラメータ演算手段7が、観測点で、飛行する航空機の音測定信号から各周波数バンドレベルと音圧レベルピーク時の仰角・方位角・音圧レベルのデータを算出し、特徴パラメータの配列とする。各特徴パラメータの要素数はデータの分散度合いにより決めればよい。例えば、周波数バンドを細かく設定したり、仰角・方位角を取得する時刻を増やしたりする。 In step SP1, the characteristic parameter calculation means 7 calculates the data of the elevation angle, the azimuth angle, and the sound pressure level at the observation point from the sound measurement signal of the flying aircraft at each frequency band level and the sound pressure level peak. Array. The number of elements of each feature parameter may be determined by the degree of data distribution. For example, the frequency band is set finely or the time for obtaining the elevation angle / azimuth angle is increased.
次いで、ステップSP2において、分類関数係数演算手段8が、ステップSP1で収集した機種毎の特徴パラメータのデータから判別分析を行うために当該航空機に該当する分類関数係数を算出する。このようにして得られた分類関数係数は、機種・飛行状態毎に記憶部5に記憶される。特徴パラメータがm個、識別する機種数がn個であるので、分類関数係数は、(m×n)の行列Aとして保存される。
Next, in step SP2, the classification function coefficient calculating means 8 calculates a classification function coefficient corresponding to the aircraft in order to perform discriminant analysis from the feature parameter data for each model collected in step SP1. The classification function coefficients obtained in this way are stored in the
次に、音測定信号から航空機の機種などを識別するための識別処理工程について説明する。識別処理工程では、音測定信号から算出した特徴パラメータと、事前に算出した分類関数係数(行列A:n×m)から,機種 (クラスC0〜Cn-1)を決定し,識別結果として表示する。 Next, an identification processing step for identifying an aircraft model or the like from the sound measurement signal will be described. In the identification processing step, the model (class C 0 to C n-1 ) is determined from the characteristic parameter calculated from the sound measurement signal and the classification function coefficient (matrix A: n × m) calculated in advance, and the identification result is obtained. indicate.
具体的には、分類関数係数で構成された行列と測定値から算出した特徴パラメータの積算で求まるクラス値の行列(n×1)について、各分類関数のクラス値の比較により、例えば最も大きい値となるものを当該機種に決定し、これを識別結果とする。 Specifically, for a class value matrix (n × 1) obtained by integrating feature parameters calculated from measured values and a matrix composed of classification function coefficients, for example, the largest value is obtained by comparing the class values of the classification functions. Is determined as the corresponding model, and this is used as the identification result.
先ず、ステップSP11において、特徴パラメータ演算手段7が、マイクロホン1により収集した音測定信号から特徴パラメータ(m個)を算出し、定数項を加え、観測データの特徴パラメータを(m×1)の行列xとする。次いで、ステップSP12において、分類クラス演算手段9が、すべての機種(クラスC0〜Cn-1)の分類関数ベクトルy(n×1)の計算を、次の行列演算により一度に行う。
First, in step SP11, the feature parameter calculation means 7 calculates feature parameters (m) from the sound measurement signals collected by the microphone 1, adds a constant term, and sets the feature parameters of the observation data as an (m × 1) matrix. Let x be. Next, in step SP12, the classification

次いで、ステップSP13において、識別手段10が、分類関数ベクトルyの各要素のうちでCi=Cpのものが最大値をとる場合、A行列のCp行目の分類関数係数に該当する機種であるとして決定する。ここでは最大値としたが、計算式の置き方により(例えば、yCp として扱うか1/yCp として扱うかにより)、最小値を最も類似すると判定する場合もある。
Next, in step SP13, when the
次いで、ステップSP14において、表示部6が、決定された機種を識別結果として表示する。上位3つのyCiを候補として選択し順位をつけて表示してもよい。また、識別された航空機の騒音レベルについては、騒音測定部4が測定し、その測定結果も表示部6に表示する。 Next, in step SP14, the display unit 6 displays the determined model as an identification result. The top three y Cis may be selected as candidates and displayed in order. Further, the noise measurement unit 4 measures the noise level of the identified aircraft, and the measurement result is also displayed on the display unit 6.
また、必要に応じて、新たな教師データを追加することで、分類関数係数を再構築することもできる。分類関数係数を作成するために収集したデータに特殊なものがあれば、それを除いて分類関数係数を再構築することが望ましい。更に、学習期間中、目的に応じた識別を精度よく且つ効率よくできるように、特徴パラメータを増減させることもできる。影響の少ないパラメータは削除し、うまく識別できないときは、新たなパラメータを追加するとよい。 Moreover, the classification function coefficient can be reconstructed by adding new teacher data as necessary. If there is special data collected to create the classification function coefficient, it is desirable to remove the classification data and reconstruct the classification function coefficient. Furthermore, during the learning period, the feature parameter can be increased or decreased so that the identification according to the purpose can be performed accurately and efficiently. Delete parameters that have little influence, and add new parameters if you cannot identify them well.
本発明により、人が常駐したり、電波受信装置や高精度なビデオ撮影を必要としたりすることなく、機種を識別した騒音の常時監視が可能となる。 According to the present invention, it is possible to constantly monitor noise identifying a model without requiring a person to be stationed or requiring a radio wave receiver or high-accuracy video shooting.
なお、本発明の実施の形態では、航空機に適用したが、航空機以外に自動車や海上交通の常時監視などにも本発明を適用することができる。例えば、自動車ではトラック、自家用車、オートバイ等の車種を識別でき、騒音源となる車種の特定に応用できる。音測定信号(SD)に相当する自動車や電車などの音測定信号による車種の特徴パラメータを選定すればよい。例えば、航空機と同様に、特徴パラメータとして最大値(LAmax)・持続時間(DUR)・各周波数バンドレベルなどである。 In the embodiment of the present invention, the present invention is applied to an aircraft. However, the present invention can also be applied to regular monitoring of automobiles and marine traffic other than aircraft. For example, in the case of automobiles, vehicle types such as trucks, private cars, motorcycles and the like can be identified, and the present invention can be applied to identification of vehicle types that are noise sources. What is necessary is just to select the characteristic parameter of the vehicle model by sound measurement signals, such as a motor vehicle and a train, equivalent to a sound measurement signal (SD). For example, as with an aircraft, the characteristic parameters include a maximum value (LAmax), a duration (DUR), and each frequency band level.
また、持続時間(DUR)を、最大値(LAmax)を基準として時間帯を複数に分割(例えば3分割)し、夫々の時間帯について音測定信号の各周波数バンドレベルなどを選択することもできる。観測点への接近時の音測定信号だけを選択してもよい。その他の移動体への応用も可能である。 Further, the duration (DUR) can be divided into a plurality of time zones (for example, divided into 3) based on the maximum value (LAmax), and each frequency band level of the sound measurement signal can be selected for each time zone. . Only the sound measurement signal when approaching the observation point may be selected. Application to other mobile objects is also possible.
音測定信号の継続時間を分割した時間帯毎の音データや観測点に近づく音データには、移動体の種類を識別するための特徴がある。特に、航空機の場合には機種を識別する他に、飛行状態(離陸、着陸、通過)や方位なども、自動的に識別して騒音を測定することができる。 The sound data for each time zone obtained by dividing the duration of the sound measurement signal and the sound data approaching the observation point have a feature for identifying the type of the moving object. In particular, in the case of an aircraft, in addition to identifying the model, the flight state (takeoff, landing, passage) and direction can be automatically identified and noise can be measured.
1…マイクロホン、2…音検出部、3…信号処理部、4…騒音測定部、5…記憶部、6…表示部、7…特徴パラメータ演算手段、8…分類関数係数演算手段、9…分類クラス演算手段、10…識別手段。 DESCRIPTION OF SYMBOLS 1 ... Microphone, 2 ... Sound detection part, 3 ... Signal processing part, 4 ... Noise measurement part, 5 ... Memory | storage part, 6 ... Display part, 7 ... Feature parameter calculation means, 8 ... Classification function coefficient calculation means, 9 ... Classification Class calculation means, 10... Identification means.
Claims (5)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010110125A JP5480009B2 (en) | 2010-05-12 | 2010-05-12 | Noise measurement device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010110125A JP5480009B2 (en) | 2010-05-12 | 2010-05-12 | Noise measurement device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011237323A true JP2011237323A (en) | 2011-11-24 |
| JP5480009B2 JP5480009B2 (en) | 2014-04-23 |
Family
ID=45325464
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010110125A Expired - Fee Related JP5480009B2 (en) | 2010-05-12 | 2010-05-12 | Noise measurement device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5480009B2 (en) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101290928B1 (en) | 2012-04-26 | 2013-07-29 | 한양대학교 산학협력단 | Equipment and method for diagnosing malfunction using sound quality parameter |
| CN110209281A (en) * | 2019-06-06 | 2019-09-06 | 瑞典爱立信有限公司 | Method, electronic equipment and the medium that motor message is handled |
| WO2024116637A1 (en) * | 2022-11-30 | 2024-06-06 | パナソニックIpマネジメント株式会社 | Classification device, learning-model generation device, classification method, and learning-model generation method |
| JP7616758B2 (en) | 2020-06-24 | 2025-01-17 | 日本電気航空宇宙システム株式会社 | Identification device, method, and program |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0193533U (en) * | 1987-12-11 | 1989-06-20 | ||
| JPH0288928A (en) * | 1988-09-27 | 1990-03-29 | Rion Co Ltd | Aircraft noise identification device |
| JPH04276523A (en) * | 1991-03-04 | 1992-10-01 | Toshiba Corp | Sound identifying apparatus |
| JPH0526720A (en) * | 1991-07-18 | 1993-02-02 | Mitsubishi Heavy Ind Ltd | Recognizing apparatus of classification |
| JPH05256741A (en) * | 1992-03-11 | 1993-10-05 | Toshiba Corp | Method and apparatus for monitoring plant signal |
| JPH06109527A (en) * | 1993-05-24 | 1994-04-19 | Kobayashi Rigaku Kenkyusho | Aircraft model identification method |
| JPH0743203A (en) * | 1993-07-30 | 1995-02-14 | Kobayashi Rigaku Kenkyusho | Mobile sound source identification method and apparatus |
| JPH0989646A (en) * | 1995-09-26 | 1997-04-04 | Rion Co Ltd | Aircraft model identification device and method |
| JP2002365126A (en) * | 2001-06-05 | 2002-12-18 | Nec Corp | System for monitoring noise of aircraft |
| JP2004191180A (en) * | 2002-12-11 | 2004-07-08 | Matsushita Electric Ind Co Ltd | Mobile object detecting system |
-
2010
- 2010-05-12 JP JP2010110125A patent/JP5480009B2/en not_active Expired - Fee Related
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0193533U (en) * | 1987-12-11 | 1989-06-20 | ||
| JPH0288928A (en) * | 1988-09-27 | 1990-03-29 | Rion Co Ltd | Aircraft noise identification device |
| JPH04276523A (en) * | 1991-03-04 | 1992-10-01 | Toshiba Corp | Sound identifying apparatus |
| JPH0526720A (en) * | 1991-07-18 | 1993-02-02 | Mitsubishi Heavy Ind Ltd | Recognizing apparatus of classification |
| JPH05256741A (en) * | 1992-03-11 | 1993-10-05 | Toshiba Corp | Method and apparatus for monitoring plant signal |
| JPH06109527A (en) * | 1993-05-24 | 1994-04-19 | Kobayashi Rigaku Kenkyusho | Aircraft model identification method |
| JPH0743203A (en) * | 1993-07-30 | 1995-02-14 | Kobayashi Rigaku Kenkyusho | Mobile sound source identification method and apparatus |
| JPH0989646A (en) * | 1995-09-26 | 1997-04-04 | Rion Co Ltd | Aircraft model identification device and method |
| JP2002365126A (en) * | 2001-06-05 | 2002-12-18 | Nec Corp | System for monitoring noise of aircraft |
| JP2004191180A (en) * | 2002-12-11 | 2004-07-08 | Matsushita Electric Ind Co Ltd | Mobile object detecting system |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101290928B1 (en) | 2012-04-26 | 2013-07-29 | 한양대학교 산학협력단 | Equipment and method for diagnosing malfunction using sound quality parameter |
| CN110209281A (en) * | 2019-06-06 | 2019-09-06 | 瑞典爱立信有限公司 | Method, electronic equipment and the medium that motor message is handled |
| CN110209281B (en) * | 2019-06-06 | 2022-03-15 | 瑞典爱立信有限公司 | Method, electronic device, and medium for processing motion signal |
| JP7616758B2 (en) | 2020-06-24 | 2025-01-17 | 日本電気航空宇宙システム株式会社 | Identification device, method, and program |
| WO2024116637A1 (en) * | 2022-11-30 | 2024-06-06 | パナソニックIpマネジメント株式会社 | Classification device, learning-model generation device, classification method, and learning-model generation method |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5480009B2 (en) | 2014-04-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101810539B1 (en) | Apparatus and method for judging traffic accident | |
| AU2019308539B2 (en) | Vehicle telematics of vehicle crashes | |
| JP7355151B2 (en) | Information processing device, information processing method, program | |
| US8395541B2 (en) | Enhanced alerting of characteristic weather hazards | |
| US9255913B2 (en) | System and method for acoustically identifying damaged sections of a route | |
| JP5950232B2 (en) | Characterization of wireless communication links | |
| CN107202983A (en) | The self-actuating brake method and system merged based on image recognition and millimetre-wave radar | |
| CN104827963B (en) | A kind of method, control system and control device for collision prevention of vehicle intelligent early-warning | |
| CN111415533B (en) | Bend safety early warning monitoring method, device and system | |
| CN111191697B (en) | ADAS road test verification optimization method and device based on sensor fusion | |
| CN113257023B (en) | L3-level automatic driving risk assessment and takeover early warning method and system | |
| JP5480009B2 (en) | Noise measurement device | |
| WO2014196115A1 (en) | Method for presenting result of determination of whether vehicle is stopped, device for determining whether vehicle is stopped, and system for determining whether vehicle is stopped | |
| WO2019125532A1 (en) | Programmatic ally identifying a personality of an autonomous vehicle | |
| JP2012103050A (en) | Method for remote detection of air turbulence, and execution device thereof | |
| CN107305772A (en) | For providing the method for sound detection information, device and vehicle including the device | |
| KR101921002B1 (en) | Aircraft noise analyzation system, and method thereof | |
| KR101768640B1 (en) | Traffic accident receiving system and method using Minimum Set of Data | |
| KR102658770B1 (en) | Method, system, and computer program product for determining safety-critical traffic scenarios for driver assistance systems (das) and highly automated driving functions (had) | |
| Sharma et al. | S-road assist: Road surface conditions and driving behavior analysis using smartphones | |
| KR102297801B1 (en) | System and Method for Detecting Dangerous Road Condition | |
| CN112526548A (en) | Rainfall identification method and device based on wind measuring laser radar | |
| CN117972364B (en) | Low-altitude airplane real-time identification method combining seismograph with deep learning | |
| CN115512716B (en) | Method, device and system for identifying abnormal sound of vehicle | |
| CN114046864B (en) | Vehicle axle number determining method and device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130409 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140128 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140204 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140213 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5480009 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |